A Wireless Sensor Network for the Real-Time Remote Measurement of Aeolian Sand Transport on Sandy Beaches and Dunes

 ,
, 
 ,
,  and
and
Abstract
:1. Introduction
2. State of the Art
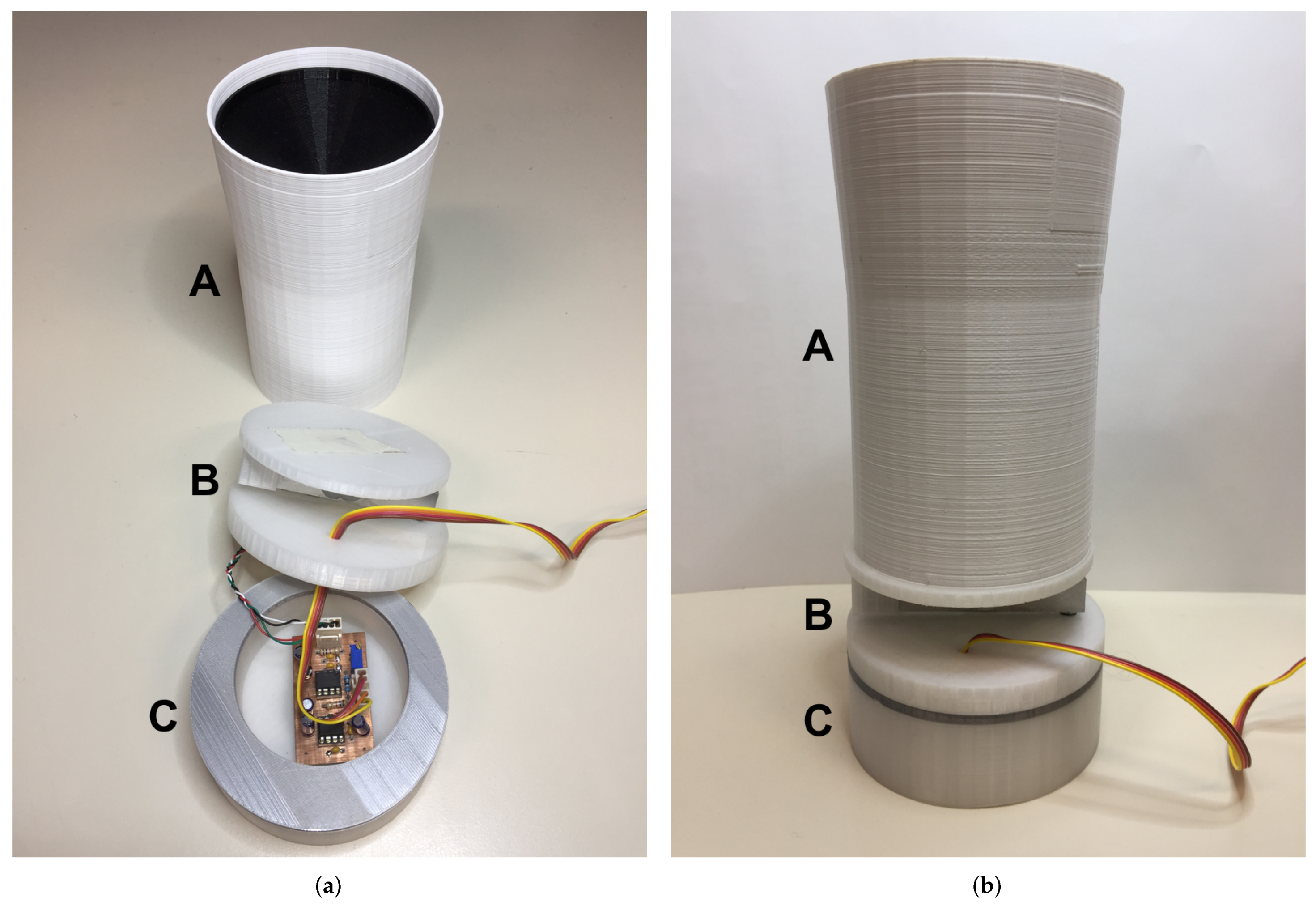
3. The Mechanical Structure
4. The Sensing Structure
5. Node and Network Architecture
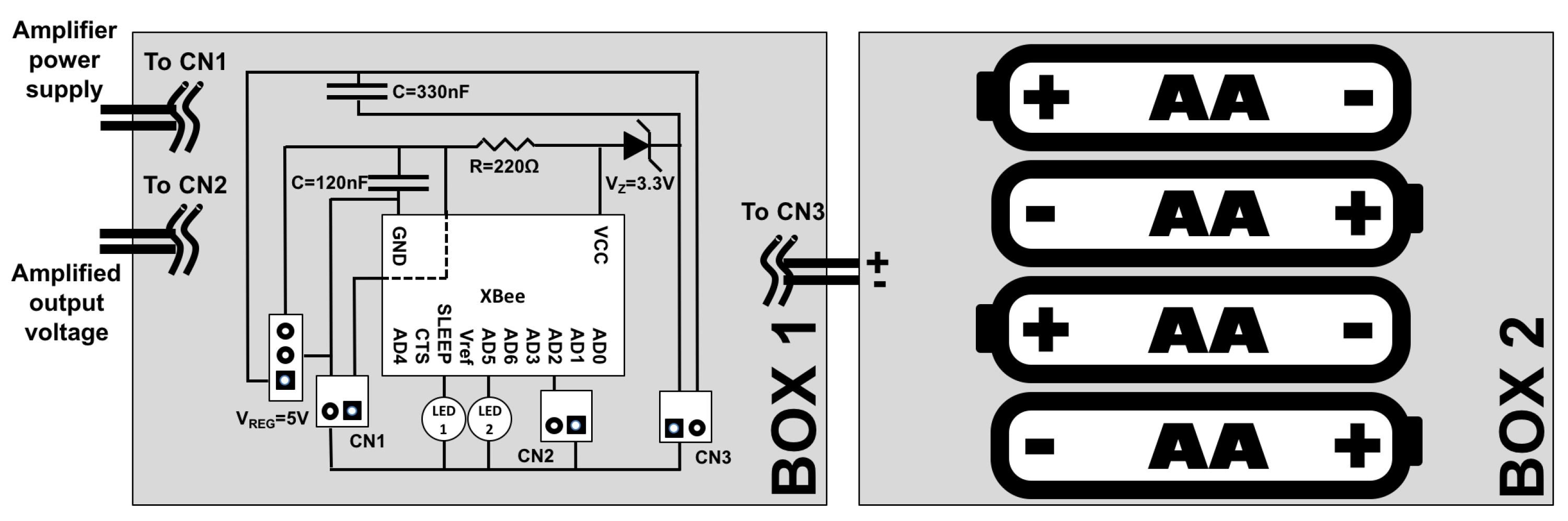
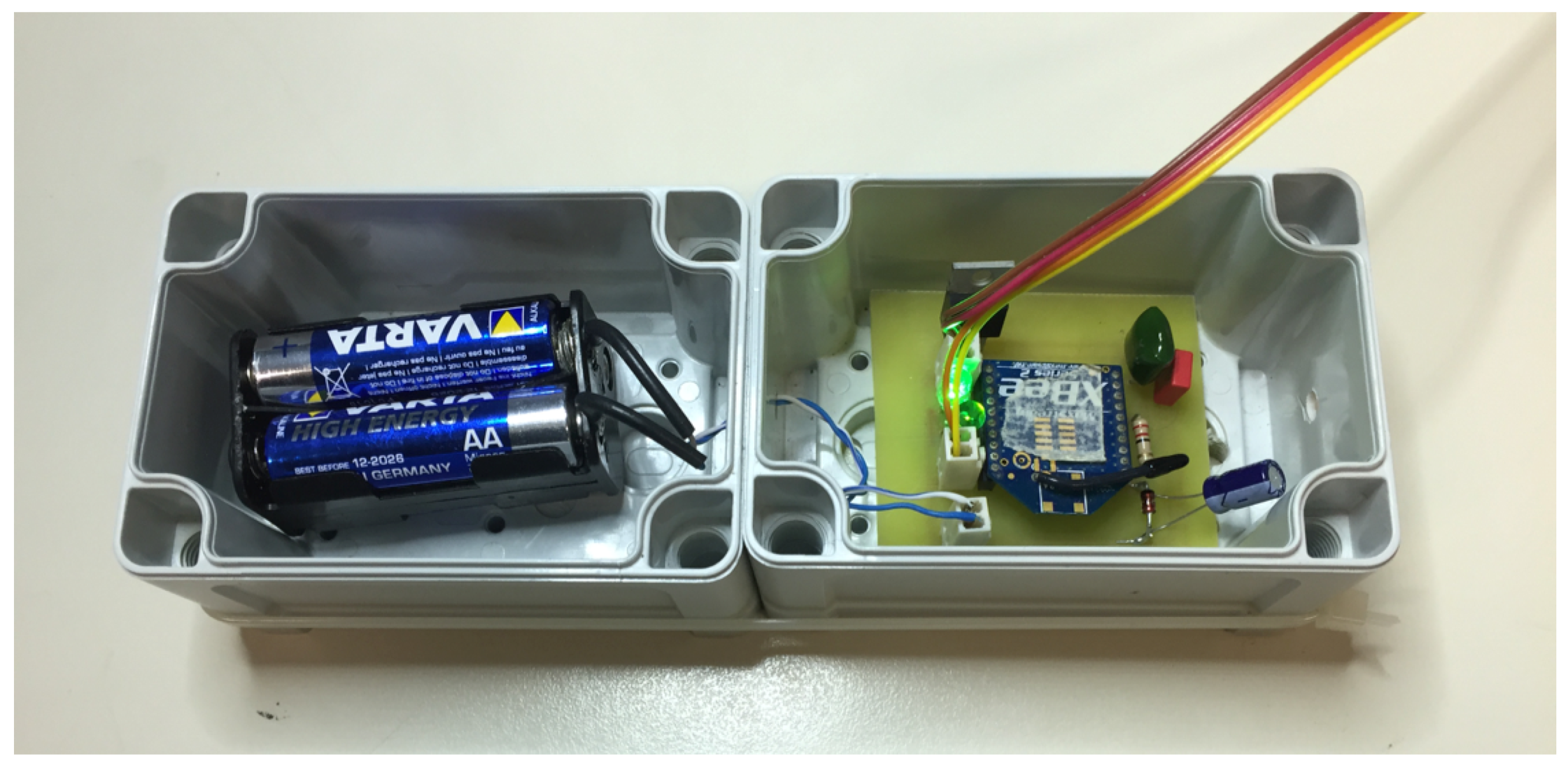
5.1. Overall Sensor Node Architecture
5.2. Wireless Sensor Network Architecture
- The previously described sand trap;
- A multi-layer anemometer-anemoscope structure;
- A gateway node for local data collection and remote transmission.
6. Tests and Results
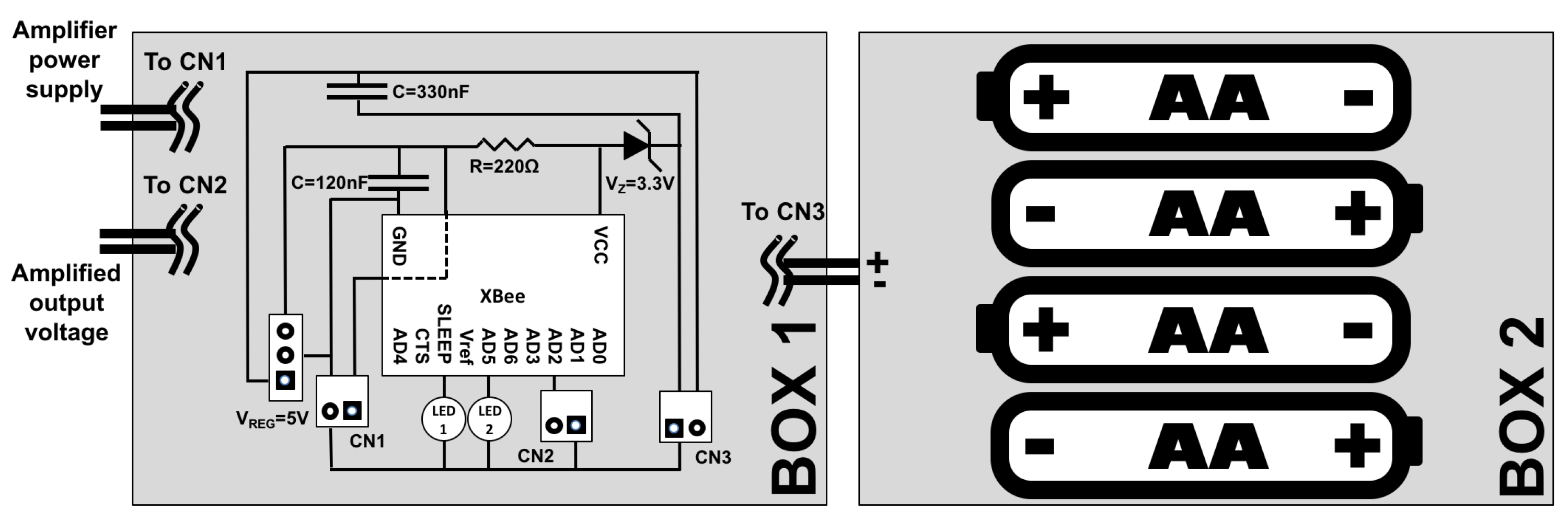
- XBee module: if not put in sleep on average ;
- INA125P instrumentation amplifier: ∼3 mAh;
- LD1085V33 Voltage regulator: ∼5 mAh.
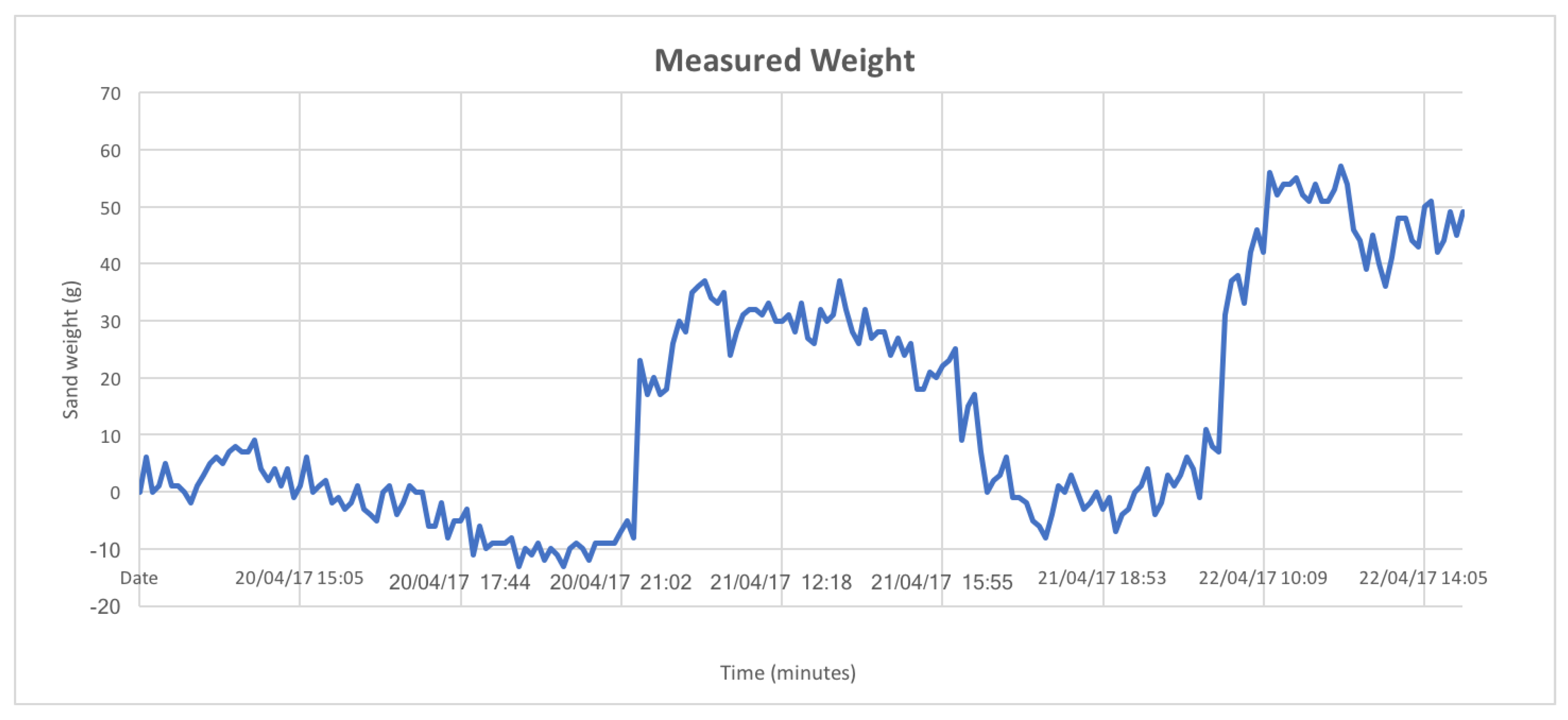
- The basket was emptied around 5:00 p.m. on the second day in order to weigh the collected sand to check the correctness of the measured weight.
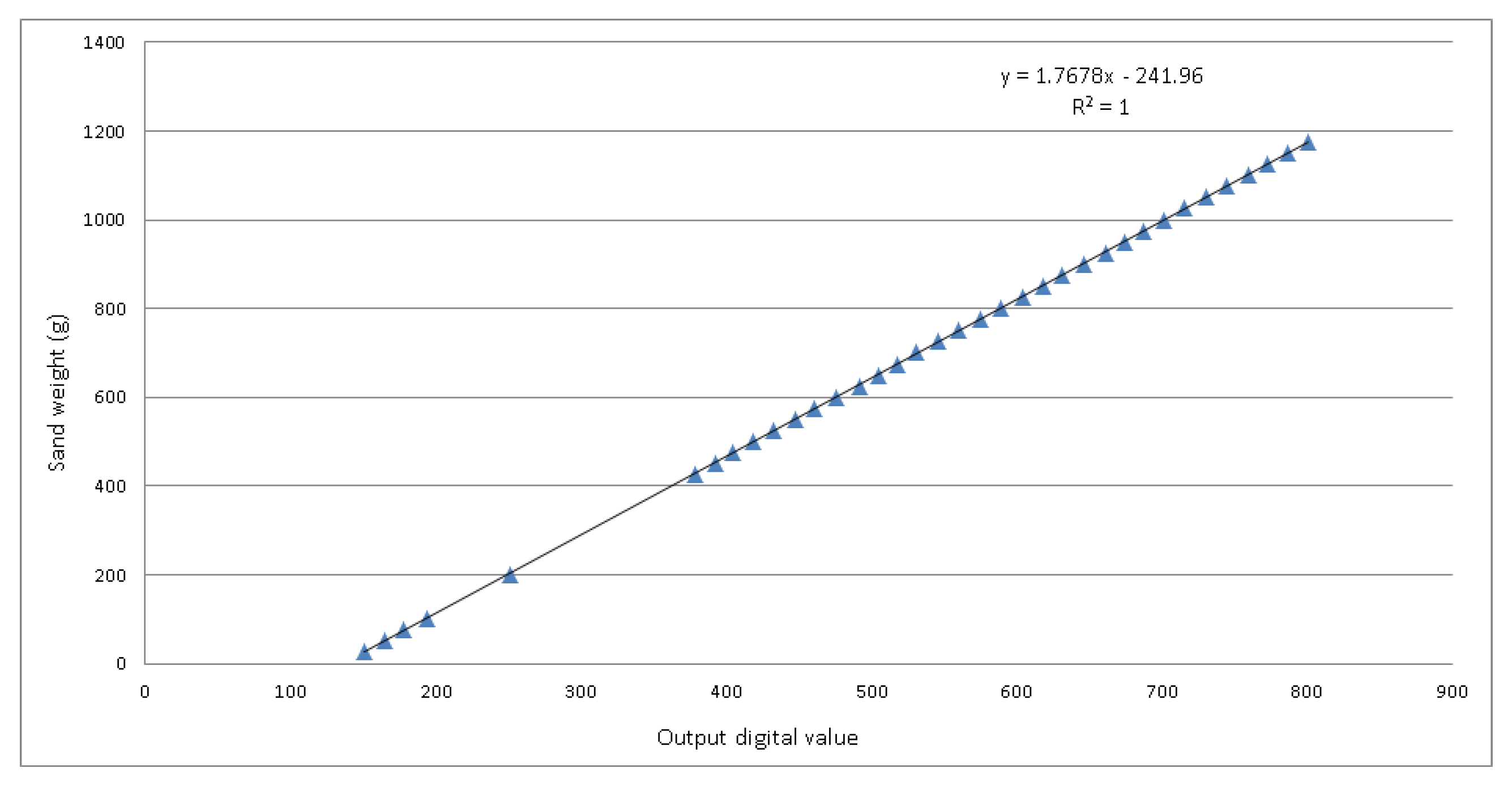
- Due to a few peaks, the data show a degree of precision which is slightly worser () than the predicted one (). Nevertheless, this result could be improved through an in field calibration of the load cell that would then hold in consideration the environmental features of the real scenario, i.e., the perfect perpendicularity of the structure, the pressure of the sand on the underground external walls of the base of the trap, the sand humidity, the impact of winds, the temperature, the plastic dilatation due to the sun exposure, etc.;
- Looking at Figure 10 it is possible to notice that the basket remained empty from the beginning of the experiment (around 12:00) to around 21:02 of the same day: during this period the sand weight values are in a range which is compliant with the required accuracy. The slight negative trend may be due to changing environmental conditions, for example a slight inclination of the trap or the presence of humidity. After 21:02 the measure values grow in a range: this value has been validated by measuring the weight of the sand with a scale after the emptying of the basket (). Two peak values ( and ) were measured during the emptying procedure and, even if reported on the chart, should not be taken into account. Following the emptying, the measured weight remained for about 7 h, going then up to a value in the range which is compliant with the weight value measured through a scale at the end of the experiment ();
- The presence of negative values is due to the calculation of the sand weight carried out by the Coordinator that subtracts to the measured value the offset weight of the basket: this means that when a value for the sand weight is calculated, the actual measured value by the cell is (the basket weight). Indeed, due to the precision degree, when the basket is empty the minimum acceptable value for the sand weight can be ∼−10 g;
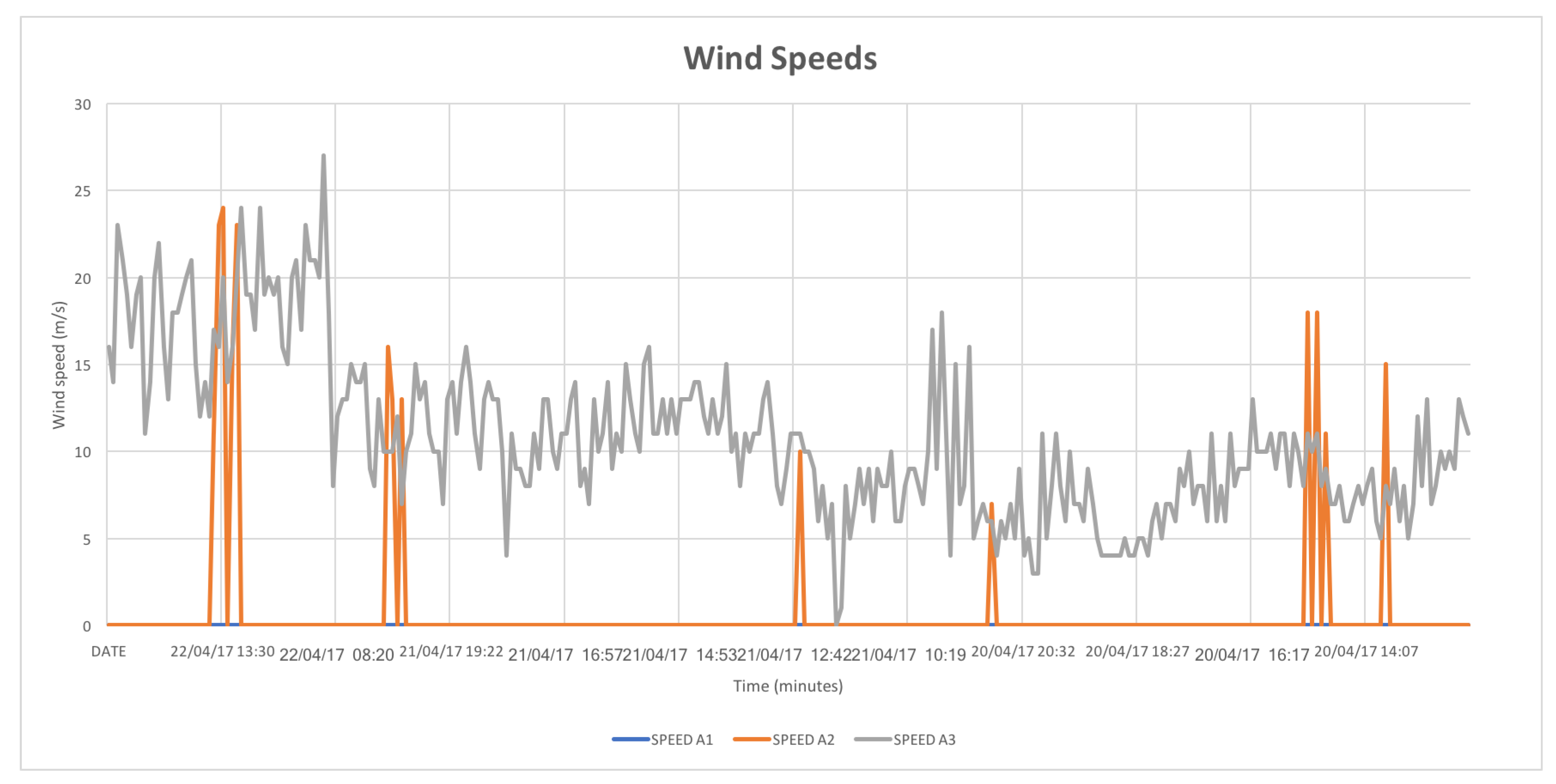
- The amount of collected sand is vary small. This suggests that the most part of aeolian sand transport is due to superficial winds that during the experimentation where almost absent;
- A few data sets were lost, mainly due to the low GPRS coverage on the beach that led sometimes the GPRS gateway to disconnect from the network and then to reconnect again after a short span of time.
7. Conclusions
Author Contributions
Conflicts of Interest
References
- Allen, J.R.L. Principles of Physical Sedimentology; Springer: Berlin/Heidelberg, Germany, 1985. [Google Scholar]
- Friedman, G.M.; Sanders, J.E.; Kopaska-Merkel, D.C. Principles of Sedimentary Deposits: Stratigraphy and Sedimentology; Macmillan: New York, NY, USA, 1992. [Google Scholar]
- Leeder, M. Sedimentology and Sedimentary Basins; Wiley-Blackwell: Hoboken, NJ, USA, 1999. [Google Scholar]
- Nichols, G. Sedimentology and Stratigraphy; Wiley-Blackwell: Hoboken, NJ, USA, 2009. [Google Scholar]
- Hjulstrom, F. Studies of the morphological activity of rivers as illustrated by the River Fyris. Bull. Geol. Instit. Upps. 1935, 25, 221–527. [Google Scholar]
- Hallet, B.; Hunter, L.; Bogen, J. Rates of erosion and sediment evacuation by glaciers: A review of field data and their implications. Glob. Planet. Chang. 1996, 12, 213–235. [Google Scholar] [CrossRef]
- Alley, R.B.; Cuffey, K.M.; Evenson, E.B.; Strasser, J.C.; Lawson, D.E.; Larson, G.J. How glaciers entrain and transport basal sediment: Physical constraints. Quat. Sci. Rev. 1997, 16, 1017–1038. [Google Scholar] [CrossRef]
- Edwards, T.K.; Glysson, G.D. Field Methods for Measurement of Fluvial Sediment (No. 03-C2); US Geological Survey; Information Services: Reston, VA, USA, 1999.
- Emmett, W.W.; Wolman, M.G. Effective discharge and gravel-bed rivers. Earth Surface Process. Landf. 2001, 26, 1369–1380. [Google Scholar] [CrossRef]
- Billi, P. Quantification of bedload flux to beaches within a global change perspective. Atti Soc. Toscana Sci. Nat. Mem. Ser. A 2017, 124, 19–29. [Google Scholar]
- Puig, P.; Ogston, A.S.; Mullenbach, C.A.; Nittrouer, C.A.; Sternerg, R.W. Shelf-to-canyon sediment-transport processes on the Eel continental margin (northern California). Mar. Geol. 2003, 193, 129–149. [Google Scholar] [CrossRef]
- Wright, L.D.; Friedrichs, C.T. Gravity-driven sediment transport on continental shelves: A status report. Cont. Shelf Res. 2006, 26, 2092–2107. [Google Scholar] [CrossRef]
- Warner, J.C.; Sherwood, C.R.; Signell, R.P.; Harris, C.K.; Arango, H.C. Development of a three-dimensional, regional, coupled wave, current, and sediment-transport model. Comput. Geosci. 2008, 34, 1284–1306. [Google Scholar] [CrossRef]
- Elfrink, B.; Baldock, T. Hydrodynamics and sediment transport in the swash zone: A review and perspectives. Coast. Eng. 2002, 45, 149–167. [Google Scholar] [CrossRef]
- Soulsby, R.L.; Damgaard, J.S. Bedload sediment transport in coastal waters. Coast. Eng. 2005, 52, 673–689. [Google Scholar] [CrossRef]
- Bertoni, D.; Grottoli, E.; Ciavola, P.; Sarti, G.; Benelli, G.; Pozzebon, A. On the displacement of marked pebbles on two coarse-clastic beaches during short fair-weather periods (Marina di Pisa and Portonovo, Italy). Geo-Mar. Lett. 2013, 33, 463–476. [Google Scholar] [CrossRef]
- Szabo, T.; Domokos, G.; Grotzinger, J.P.; Jerolmack, D.J. Reconstructing the transport history of pebbles on Mars. Nat. Commun. 2015, 6, 8366. [Google Scholar] [CrossRef] [PubMed]
- Masselink, G.; Hughes, M.G.; Knight, J. Introduction to Coastal Processes and Geomorphology; Routledge: Abingdon-on-Thames, UK, 2014. [Google Scholar]
- French, P.W. Coastal Defences: Processes, Problems and Solutions; Routledge: Abingdon-on-Thames, UK, 2001. [Google Scholar]
- Bruun, P.; Willekes, G. Bypassing and Backpassing at Harbors, Navigation Channels, and Tidal Entrances: Use of Shallow-Water Draft Hopper Dredgers with Pump-Out Capabilities. J. Coast. Res. 1992, 8, 972–977. [Google Scholar]
- Nordstrom, K.F.; Jackson, N.L.; Bruno, M.S.; de Butts, H.A. Municipal initiatives for managing dunes in coastal residential areas: A case study of Avalon, New Jersey, USA. Geomorphology 2002, 47, 137–152. [Google Scholar] [CrossRef]
- ETC-CCA. Methods for assessing coastal vulnerability to climate change. In Vulnerability and Adaptation Technical Paper 1/2011; European Topic Centre on Climate Change Impacts: Bologna, Italy, 2011; Volume 93, Available online: http://cca.eionet.europa.eu/docs/TP_1-2011 (accessed on 23 January 2018).
- Sear, D.A.; Lee, M.W.E.; Oakley, R.J.; Carling, P.A.; Collins, M.B. Coarse sediment tracing technology in littoral and fluvial environments a review. In Tracers in the Environment. Special Issue, Earth Surface Processes and Landforms; Foster, I., Ed.; John Wiley & Sons: Hoboken, NJ, USA, 2002; pp. 21–55. [Google Scholar]
- McCave, I.N. Grainsize trends and transport along beaches: Example from eastern England. Mar. Geol. 1978, 28, M43–M51. [Google Scholar] [CrossRef]
- McLaren, P. An interpretation of trends in grain-size measures. J. Sediment. Res. 1981, 51, 611–624. [Google Scholar]
- Gandolfi, G.; Paganelli, L. Il litorale pisano-versiliese (Area campione Alto Tirreno). Composizione, provenienza e dispersione delle sabbie. Boll. Soc. Geol. Ital. 1975, 94, 1273–1295. [Google Scholar]
- Salomons, W.; Mook, W.G. Natural tracers for sediment transport studies. Cont. Shelf Res. 1987, 7, 1333–1343. [Google Scholar] [CrossRef]
- Grousset, F.E.; Biscaye, P.E.; Zindler, A.; Prospero, J.; Chester, R. Neodymium isotopes as tracers in marine sediments and aerosols: North Atlantic. Earth Planet. Sci. Lett. 1988, 87, 367–378. [Google Scholar] [CrossRef]
- Douglas, G.; Palmer, M.; Caitcheon, G. The provenance of sediments in Moreton Bay, Australia: A synthesis of major, trace element and Sr-Nd-Pb isotopic geochemistry, modelling and landscape analysis. In The Interactions between Sediments and Water. Developments in Hydrobiology; Kronvang, B., Ed.; Springer: Berlin, Germany, 1975; Volume 169, pp. 145–152. [Google Scholar]
- Gao, S.; Collins, M. Net sand transport direction in a tidal inlet, using foraminiferal tests as natural tracers. Estuar. Coast. Shelf Sci. 1995, 40, 681–697. [Google Scholar] [CrossRef]
- Benavente, J.; Gracia, F.J.; Anfuso, G.; Lopez-Aguayo, F. Temporal assessment of sediment transport from beach nourishments by using foraminifera as natural tracers. Coast. Eng. 2005, 52, 205–219. [Google Scholar] [CrossRef]
- Crickmore, M.J.; Lean, G.H. The measurement of sand transport by means of radioactive tracers. Proc. R. Soc. Lond. 1962, 266, 402–421. [Google Scholar] [CrossRef]
- Komar, P.D.; Inman, D.L. Longshore sand transport on beaches. J. Geophys. Res. 1970, 75, 5914–5927. [Google Scholar] [CrossRef]
- Ciavola, P.; Dias, N.; Ferreira, O.; Taborda, R.; Dias, J.M.A. Fluorescent sands for measurements of longshore transport rates: A case study from Praia de Faro in southern Portugal. Geo-Mar. Lett. 1998, 18, 49–57. [Google Scholar] [CrossRef]
- Allan, J.C.; Hart, R.; Tranquilli, V. The use of Passive Integrated Transponder (PIT) tags to trace cobble transport in a mixed sand-and-gravel beach on the high-energy Oregon coast, USA. Mar. Geol. 2006, 232, 63–86. [Google Scholar] [CrossRef]
- Bertoni, D.; Sarti, G.; Benelli, G.; Pozzebon, A.; Raguseo, G. Radio Frequency Identification (RFID) technology applied to the definition of underwater and subaerial coarse sediment movement. Sediment. Geol. 2010, 228, 140–150. [Google Scholar] [CrossRef]
- Grottoli, E.; Bertoni, D.; Ciavola, P.; Pozzebon, A. Short term displacements of marked pebbles in the swash zone: Focus on particle shape and size. Mar. Geol. 2015, 367, 143–158. [Google Scholar] [CrossRef]
- Bertoni, D.; Sarti, G.; Grottoli, E.; Ciavola, P.; Pozzebon, A.; Domokos, G.; Novàk-Szabó, T. Impressive abrasion rates of marked pebbles on a coarse-clastic beach within a 13-month timespan. Mar. Geol. 2016, 381, 175–180. [Google Scholar] [CrossRef]
- Osborne, P.D. Transport of gravel and cobble on a mixed-sediment inner bank shoreline of a large inlet, Grays Harbor, Washington. Mar. Geol. 2005, 224, 145–156. [Google Scholar] [CrossRef]
- Ciavola, P.; Castiglione, E. Sediment dynamics of mixed sand and gravel beaches at short time-scales. J. Coast. Res. 2009, SI 56, 1751–1755. [Google Scholar]
- Hattori, M.; Suzuki, T. Field experiment on beach gravel movement. In Proceedings of the 16th Conference on Coastal Engineering, Hamburg, Germany, 27 August–3 September 1978; pp. 1688–1704. [Google Scholar]
- Bray, M.J.; Workman, M.; Smith, J.; Pope, D. Field measurements of shingle transport using electronic tracers. In Proceedings of the 31st MAFF Conference of River and Coastal Engineers, Loughborough, UK, 3–5 July 1996; pp. 10.4.1–10.4.13. [Google Scholar]
- Clarke, D.J.; Eliot, I.G. Low-frequency changes of sediment volume on the beachface at Warilla Beach, New South Wales, 1975–1985. Mar. Geol. 1988, 79, 189–211. [Google Scholar] [CrossRef]
- Hill, H.W.; Kelley, J.T.; Belknap, D.F.; Dickson, S.M. The effects of storms and storm-generated currents on sand beaches in Southern Maine, USA. Mar. Geol. 2004, 210, 149–168. [Google Scholar] [CrossRef]
- Grottoli, E.; Bertoni, D.; Ciavola, P. Short- and medium-term response to storms on three Mediterranean coarse-grained beaches. Geomorphology 2017, 295, 738–748. [Google Scholar] [CrossRef]
- Boak, E.H.; Turner, I.L. Shoreline Definition and Detection: A Review. J. Coast. Res. 2005, 21, 688–703. [Google Scholar] [CrossRef]
- Ojeda, E.; Guillén, J. Shoreline dynamics and beach rotation of artificial embayed beaches. Mar. Geol. 2008, 253, 51–62. [Google Scholar] [CrossRef]
- Ruiz de Alegria-Arzaburu, A.; Masselink, G. Storm response and beach rotation on a gravel beach, Slapton Sands, U.K. Mar. Geol. 2010, 278, 77–99. [Google Scholar] [CrossRef]
- Blodget, H.W.; Taylor, P.T.; Roark, J.H. Shoreline changes along the Rosetta-Nile Promontory: Monitoring with satellite observations. Mar. Geol. 1991, 99, 67–77. [Google Scholar] [CrossRef]
- Chu, Z.X.; Sun, X.G.; Zhai, S.K.; Xu, K.H. Changing pattern of accretion/erosion of the modern Yellow River (Huanghe) subaerial delta, China: Based on remote sensing images. Mar. Geol. 2006, 227, 13–30. [Google Scholar] [CrossRef]
- Gardner, W.D. Sediment trap dynamics and calibration: A laboratory evaluation. J. Mar. Res. 1980, 38, 17–39. [Google Scholar]
- Baker, E.T.; Milburn, H.B.; Tennant, D.A. Field assessment of sediment trap efficiency under varying flow conditions. J. Mar. Res. 1988, 46, 573–592. [Google Scholar] [CrossRef]
- Storlazzi, C.D.; Field, M.E.; Bothner, M.H. The use (and misuse) of sediment traps in coral reef environments: Theory, observations, and suggested protocols. Coral Reefs 2011, 30, 23–38. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Mainwaring, A.; Culler, D.; Polastre, J.; Szewczyk, R.; Anderson, J. Wireless sensor networks for habitat monitoring. In Proceedings of the 1st ACM International Workshop on Wireless Sensor Networks and Applications (WSNA 02), Atlanta, GA, USA, 28 September 2002; ACM: New York, NY, USA, 2002; pp. 88–97. [Google Scholar]
- Oliveira, L.M.; Rodrigues, J.J. Wireless Sensor Networks: A Survey on Environmental Monitoring. JCM 2011, 6, 143–151. [Google Scholar] [CrossRef]
- Albaladejo, C.; Sanchez, P.; Iborra, A.; Soto, F.; Lopez, J.A.; Torres, R. Wireless sensor networks for oceanographic monitoring: A systematic review. Sensors 2010, 10, 6948–6968. [Google Scholar] [CrossRef] [PubMed]
- Xu, G.; Shen, W.; Wang, X. Applications of wireless sensor networks in marine environment monitoring: A survey. Sensors 2010, 14, 16932–16954. [Google Scholar] [CrossRef] [PubMed]
- O’Flyrm, B.; Martinez, R.; Cleary, J.; Slater, C.; Regan, F.; Diamond, D.; Murphy, H. SmartCoast: A wireless sensor network for water quality monitoring. In Proceedings of the 32nd IEEE Conference on Local Computer Networks (LCN 2007), Dublin, Ireland, 15–18 October 2007; pp. 815–816. [Google Scholar]
- Adamo, F.; Attivissimo, F.; Carducci, C.G.C.; Lanzolla, A.M.L. A smart sensor network for sea water quality monitoring. IEEE Sens. J. 2015, 15, 2514–2522. [Google Scholar] [CrossRef]
- Sieber, A.; Cocco, M.; Markert, J.; Wagner, M.F.; Bedini, R.; Dario, P. ZigBee based buoy network platform for environmental monitoring and preservation: Temperature profiling for better understanding of Mucilage massive blooming. In Proceedings of the 2008 International Workshop onIntelligent Solutions in Embedded Systems, Regensburg, Germany, 10–11 July 2008; pp. 1–14. [Google Scholar]
- De Marziani, C.; Alcoleas, R.; Colombo, F.; Costa, N.; Pujana, F.; Colombo, A.; Aparicio, J.; Alvarez, F.J.; Jimenez, A.; Urena, J.; et al. A low cost reconfigurable sensor network for coastal monitoring. In Proceedings of the 2011 IEEE OCEANS, Santander, Spain, 6–9 June 2011; pp. 1–6. [Google Scholar]
- Perez, C.A.; Jimenez, M.; Soto, F.; Torres, R.; Lopez, J.A.; Iborra, A. A system for monitoring marine environments based on wireless sensor networks. In Proceedings of the 2011 IEEE OCEANS, Santander, Spain, 6–9 June 2011; pp. 1–6. [Google Scholar]
- Elgenaidi, W.; Newe, T.; O’Connell, E.; Toal, D.; Dooly, G. Secure and efficient key coordination algorithm for line topology network maintenance for use in maritime wireless sensor networks. Sensors 2016, 16, 2204. [Google Scholar] [CrossRef] [PubMed]
- Wei, L.; Zhang, L.; Huang, D.; Zhang, K.; Dai, L.; Wu, G. PSDAAP: Provably Secure Data Authenticated Aggregation Protocols Using Identity-Based Multi-Signature in Marine WSNs. Sensors 2017, 17, 2117. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Chen, W.; Liang, J.; Zheng, B.; Jiang, S. A network topology control and identity authentication protocol with support for movable sensor nodes. Sensors 2015, 15, 29958–29969. [Google Scholar] [CrossRef] [PubMed]
- Caiti, A.; Calabro, V.; Dini, G.; Lo Duca, A.; Munafo, A. Secure cooperation of autonomous mobile sensors using an underwater acoustic network. Sensors 2012, 12, 1967–1989. [Google Scholar] [CrossRef] [PubMed]
- Poortinga, A.; van Rheenen, H.; Ellis, J.T.; Sherman, D.J. Measuring aeolian sand transport using acoustic sensors. Aeolian Res. 2012, 16, 143–151. [Google Scholar] [CrossRef]
- Udo, K. New method for estimation of aeolian sand transport rate using ceramic sand flux sensor (UD-101). Sensors 2009, 9, 9058–9072. [Google Scholar] [CrossRef] [PubMed]
- Raygosa-Barahona, R.; Ruiz-Martinez, G.; Marino-Tapia, I.; Heyser-Ojeda, E. Design and initial testing of a piezoelectric sensor to quantify aeolian sand transport. Aeolian Res. 2016, 22, 127–134. [Google Scholar] [CrossRef]
- Han, W.; Zhang, N.; Zhang, Y. A two-layer Wireless Sensor Network for remote sediment monitoring. In Proceedings of the 2008 ASABE Annual International Meeting, Providence, Rhode Island, 29 June–2 July 2008; Volume 300. [Google Scholar]
- Sudhakaran, A.; Paramasivam, A.; Seshachalam, S. Acoustic measurement of sediment dynamics in the coastal zones using wireless sensor networks. In Proceedings of the AGU Fall Meeting Abstracts, San Francisco, CA, USA, 15–19 December 2014. [Google Scholar]
- Burr-Brown Corporation. INA125 Datasheet; Burr-Brown Corporation: Tucson, AZ, USA, 1997. [Google Scholar]
- Digi International Inc. XBee/XBee-PRO ZB RF Modules User Manual; Digi International Inc.: Minnetonka, MN, USA, 2012. [Google Scholar]
- Pozzebon, A.; Bove, C.; Cappelli, I.; Alquini, F.; Bertoni, D.; Sarti, G. Heterogeneous Wireless Sensor Network for Real Time Remote Monitoring of Sand Dynamics on Coastal Dunes. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Prague, Czech Republic, 5–9 September 2016. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
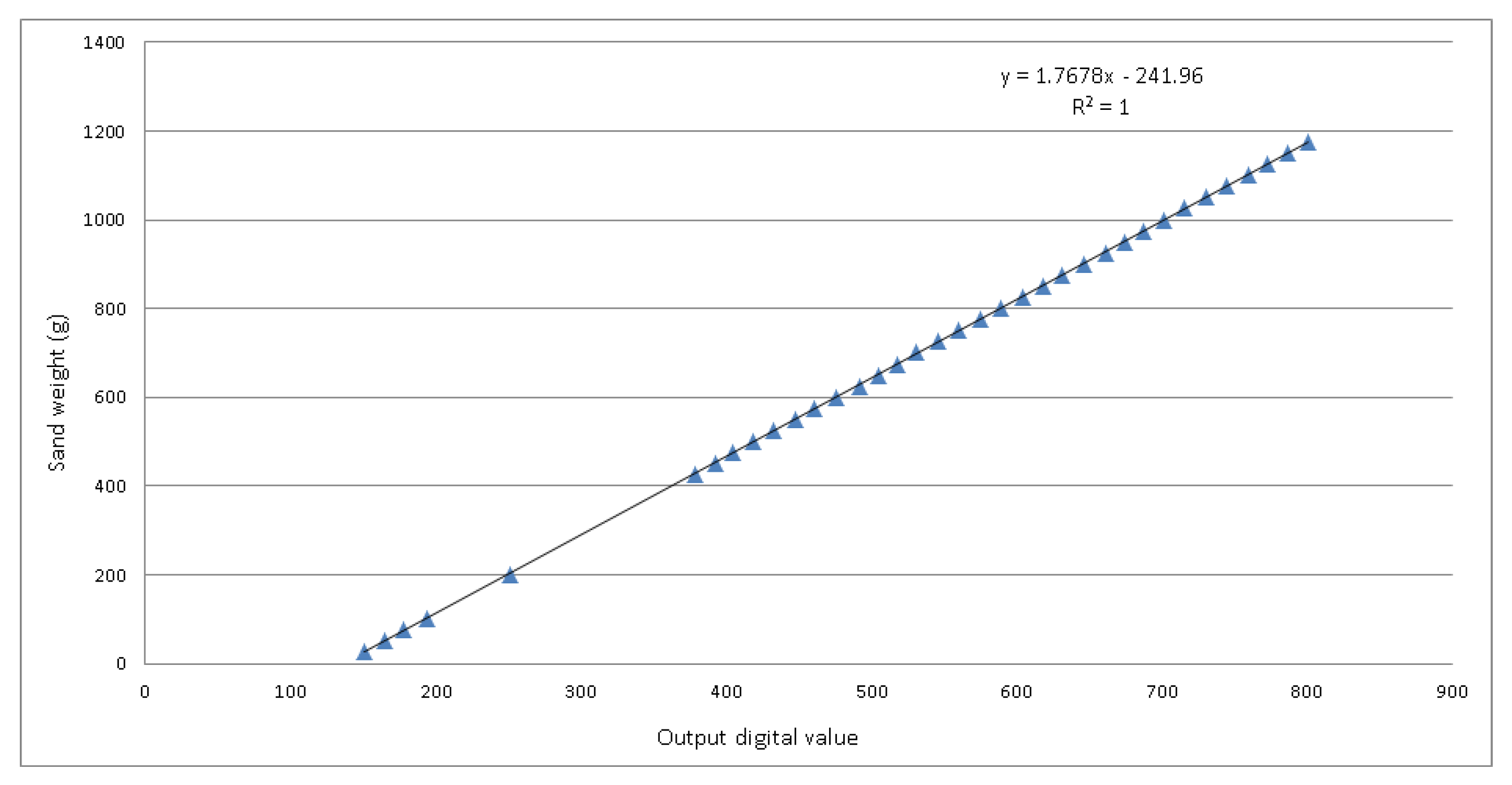
| Weight | Output Digital Value | Sand Weight | Output Digital Value |
|---|---|---|---|
| 25 g | 151 | 750 g | 560 |
| 50 g | 165 | 775 g | 575 |
| 75 g | 178 | 800 g | 589 |
| 100 g | 194 | 825 g | 605 |
| 200 g | 251 | 850 g | 618 |
| 425 g | 379 | 875 g | 632 |
| 450 g | 393 | 900 g | 647 |
| 475 g | 405 | 925 g | 662 |
| 500 g | 419 | 950 g | 675 |
| 525 g | 433 | 975 g | 688 |
| 550 g | 448 | 1000 g | 702 |
| 575 g | 461 | 1025 g | 716 |
| 600 g | 476 | 1050 g | 731 |
| 625 g | 492 | 1075 g | 745 |
| 650 g | 505 | 1100 g | 760 |
| 675 g | 518 | 1125 g | 773 |
| 700 g | 531 | 1150 g | 787 |
| 725 g | 546 | 1175 g | 801 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pozzebon, A.; Cappelli, I.; Mecocci, A.; Bertoni, D.; Sarti, G.; Alquini, F. A Wireless Sensor Network for the Real-Time Remote Measurement of Aeolian Sand Transport on Sandy Beaches and Dunes. Sensors 2018, 18, 820. https://doi.org/10.3390/s18030820
Pozzebon A, Cappelli I, Mecocci A, Bertoni D, Sarti G, Alquini F. A Wireless Sensor Network for the Real-Time Remote Measurement of Aeolian Sand Transport on Sandy Beaches and Dunes. Sensors. 2018; 18(3):820. https://doi.org/10.3390/s18030820
Chicago/Turabian StylePozzebon, Alessandro, Irene Cappelli, Alessandro Mecocci, Duccio Bertoni, Giovanni Sarti, and Fernanda Alquini. 2018. "A Wireless Sensor Network for the Real-Time Remote Measurement of Aeolian Sand Transport on Sandy Beaches and Dunes" Sensors 18, no. 3: 820. https://doi.org/10.3390/s18030820
APA StylePozzebon, A., Cappelli, I., Mecocci, A., Bertoni, D., Sarti, G., & Alquini, F. (2018). A Wireless Sensor Network for the Real-Time Remote Measurement of Aeolian Sand Transport on Sandy Beaches and Dunes. Sensors, 18(3), 820. https://doi.org/10.3390/s18030820