This section describes the main contribution of this paper. First subsection presents the study scenario and the characteristics of the considered WSN. Second subsection presents a global overview of the proposed technique and the data format employed in task execution orders. The third subsection explains the behaviour of the proposed network gateway. And, finally, fourth subsection describes the proposed hardware-supported algorithm to be implemented in sensor nodes.
3.1. Study Scenario
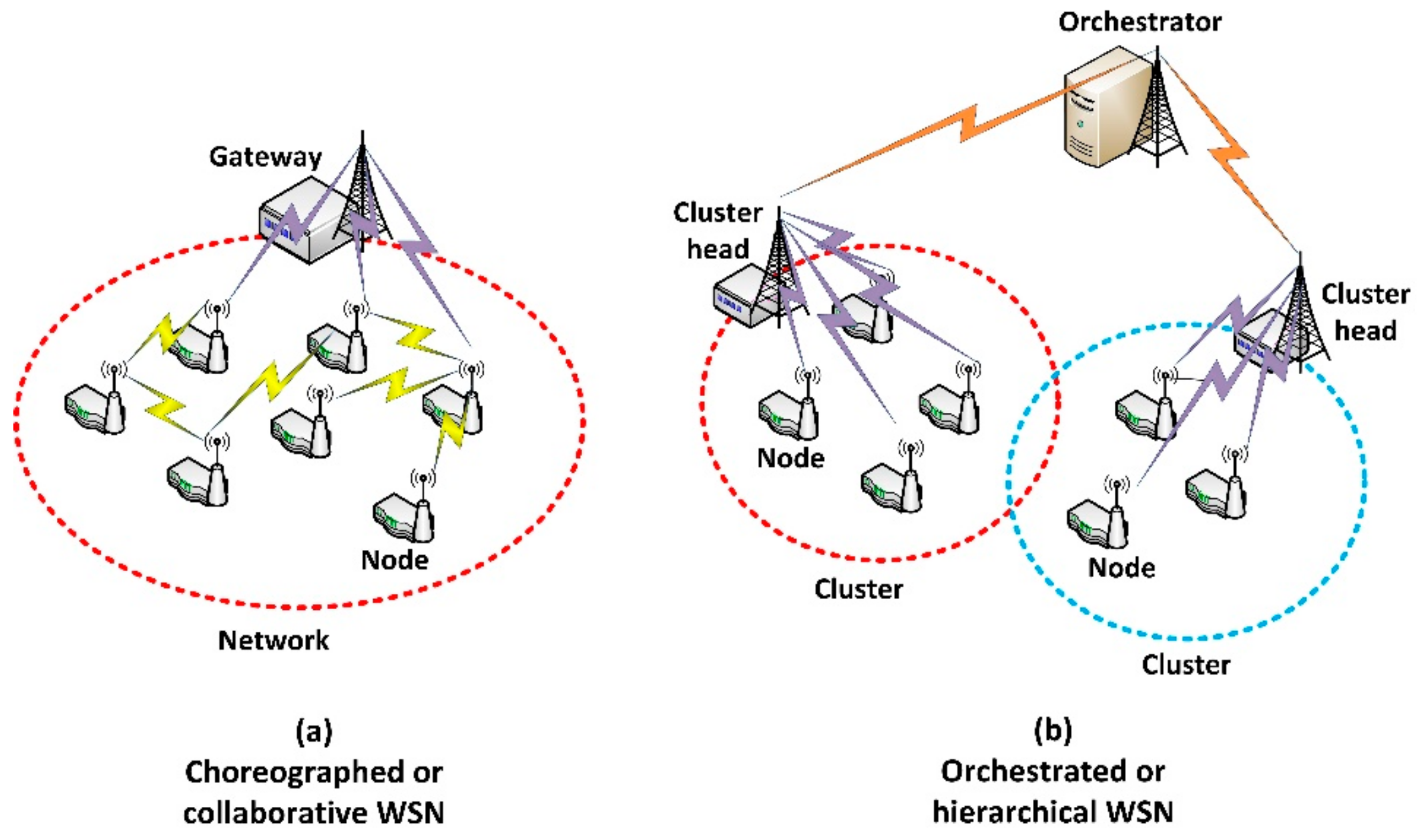
Our scenario is designed for all types of environments where smart sensor nodes are deployed to perform cyber-physical operations, i.e., operations where either some information (such as temperature, humidity, presence, etc.) is gathered from the environment, or some effects (e.g., turning on the lights) are applied to the physical world. The node density is very high, because new deployments tend to be pervasive and future paradigms such as pervasive sensing platforms or smart dust present this characteristic.
Besides, hardware capabilities are redundant; so many different nodes may perform any operation within the WSN. In this initial study, we do not consider operations involving the transmission of images, video streams, sounds or other information requiring large and/or variable amount of data. Each operation consists of two messages: a bit-oriented execution order with a fixed structure and length; and a bit-oriented response including the result of the operation also with a fixed structure and length (see
Section 3.2). We are also assuming the WSN performs a constant monitoring of the environment and may execute operations at any moment. However, real-time processing is not mandatory, if the application scenario does not require this characteristic (as in some agricultural systems [
35]). Thus, ad hoc sensor networks and mobile nodes may be also considered. Even, other solutions, such as including the sensors in mobile nodes could be also considered if necessary.
The proposed technology belongs to the transport level in the OSI reference model [
36]. As in standard Internet transactions, operation messages in WSN enable the communication of remote applications (i.e., the user application which invokes the operation and the low-level program in the smart node which finally executes it); regardless the underlying infrastructure. As in other transport level protocols, the proposed technology allows identifying the application to be invoked, considering reliable communications and generating complex transactions.
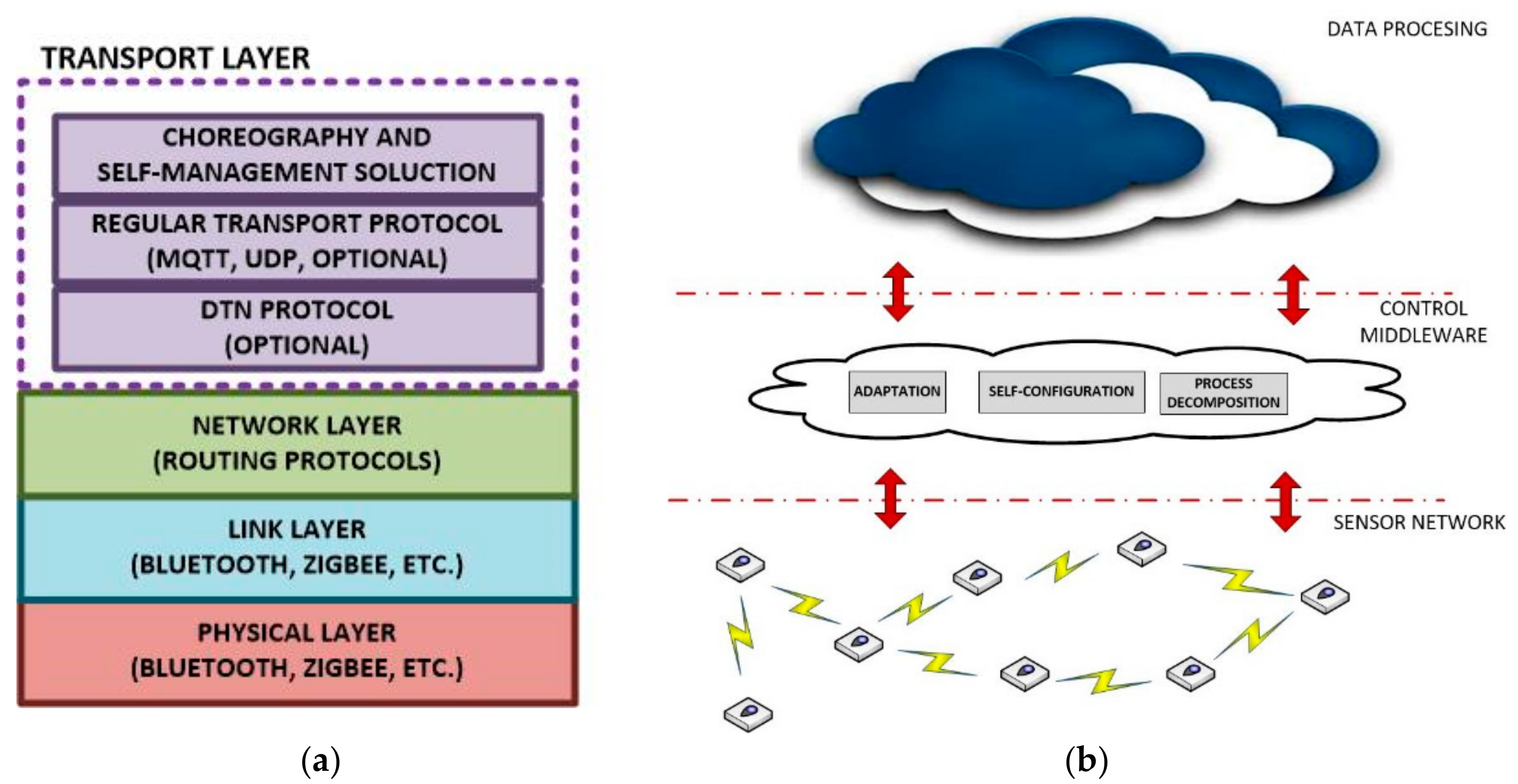
As a consequence, in our scenario, all nodes must implement a network protocol proving addressing to the entire network. No special characteristics are required from this protocol, except a broadcast and/or anycast solution [
37] must be supported. If needed, a Delay-Tolerant Protocol [
38] could be also included (see
Figure 2a).
A complete list of all admissible or preferred characteristics should be based on a deep analysis and the definition and characterization of all possible application scenarios [
18] but in our case, we are going to work over some common characteristics for all cases, which are:
Lack of infrastructure for supporting power supply or access to unlimited data storage (such as data bases).
Usage of specific protocols for stablishing WSN’s topology in an autonomous way and for routing data from the user applications to the smart nodes which must perform the cyber-physical operations
Nodes may be mobile and stablish ad hoc connections. DTN technologies for communication among nodes and other components could be included.
The node density is very high and hardware capabilities are very redundant.
The entire WSN is deployed in a unique geographical location. Thus, cyber-physical operations considering geographic information can be executed in any available node.
The first point limits the kind of technologies we can use and more specifically, the lack of power supply limits the service time of the network, which is a key element for the usability of such kind of solutions in real environments.
The second and third points explain how smart nodes create an organized network. On the one hand, as the proposed technology belong to transport level, network level solutions must be previously considered. On the other hand, as nodes may be mobile and not be available all time, Delay-Tolerant Network (DTN) technologies to allow reliable and efficient communication could be implemented.
Finally, the fourth and fifth points are directly generated by the requirements imposed by most recent and future scenarios. Industry 4.0 systems or pervasive sensing platforms, in fact, are based on very dense networks, deployed in a unique geographical location and with a very high reliability (so several redundant nodes are included).
Three layers are identified in our application scenarios: sensor network, control middleware and data processing and user applications (
Figure 2b).
Sensor network refers to a set of sensorization nodes, including transducers and processing components, being able to execute cyber-physical operations (and, in consequence, tasks, see
Section 3.2). In general, sensors may be distributed in a random way (if node installation is possible in all points within the deployment area) or in a planned way (if some points are preferred). Therefore, we cannot guarantee that we know every position of the fixed nodes. In this work, we are assuming we know neither the sensors’ position nor network topology or the number of nodes. Moreover, in relation to the node characteristics, the proposed solution allows employing any type of device. That means we do not have to be worried about values such as the sensing range, the sensing period or the monitored variable; because our proposal is independent from sensors’ features and only considers generic parameters, such as the energy consumption. In that way, these assumptions make the proposal very general and flexible.
Control middleware includes all the components employed to communicate and adapt the low-level architecture of WSN and the high-level design of user applications. Process decomposition mechanisms, self-configuration instruments and many other similar solutions are included in this layer.
Data processing layer and user applications refer to all final high-level components which receive data from WSN and control middleware, process them and (eventually) store and/or present them. This layer can be based on any standard technology like centralized services or cloud services, because in our scenarios real time operations are not mandatory if the application scenario does not require them.
3.2. Global Overview. Protocol for Task Execution
The proposed technology is composed of two different algorithms. The first one is implemented in the control middleware, where a lightweight gateway is included in order to avoid the congestion of the WSN (guarantying the stability of the choreography solution). The second one is implemented in all nodes of the WSN, so they can self-manage their resources and the execution of the delegated tasks.
In this context, a task is understood as the sequence of various chained cyber-physical operations (CPOs), for which it must be obtained a unique and global result by the WSN. In a more formal way, a task may be represented as a workflow of cyber-physical operations. These workflows can be described using any available description language (BPEL, BPMN, etc.), although in this article we are employing YAWL [
39] because of their capability to represent almost every possible situation.
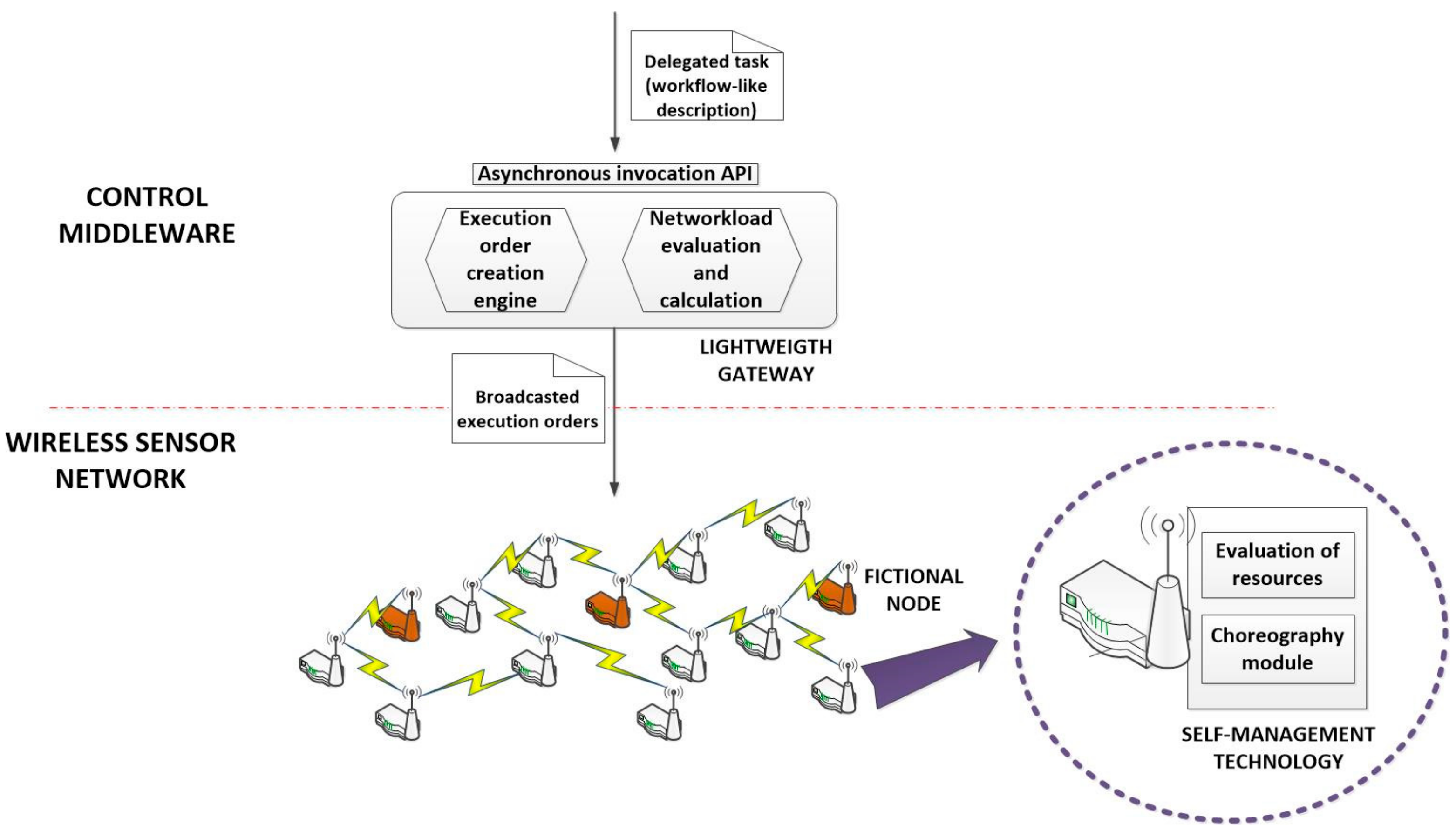
Delegated tasks can be received in the control middleware already described as workflows of cyber-physical operations or may be transformed in that middleware. Any case, this transformation process is not the objective this paper, so we are assuming we already have that workflow-like description (see
Figure 3).
According to the Erlang’s queue theory, a lightweight gateway in the control middleware evaluates if the maximum allowed load in the sensor networks has been reached (i.e., if the network is congested). If positive, the task execution is rejected. However, in order to determine the maximum allowed load in the WSN, a statistical procedure is employed, so some rejected tasks are finally executed in order to determine if the network is in fact congested or the maximum allowed load can be increased.
Accepted tasks are transformed in a set of execution orders (one per cyber-physical operation in the task workflow), which are represented using a bit-oriented format. These orders also contain information about how they are related among them in order to guarantee that inputs and outputs of the different operations are correctly linked. This characteristic enables the use of hardware-supported technologies in nodes.
Once constructed, these orders are broadcasted in the WSN. Thus, the smart nodes in the WSN include a hardware module which, once received an execution order, decides if the node can or cannot execute this operation. In this decision, the proposed algorithm considers the available resources, the interest and importance of the operation to be executed and the predicted resource consumption made when performing the operation. These resource self-management functionalities are complemented with choreography solutions, so that nodes can decide in an autonomous way which device finally executes the operation (using pseudorandom number generators); and can also compose the final result of a delegated task from the partial results of the performed cyber-physical operations (using the identifiers and the cross-references included in the execution orders).
In this proposal, these solutions are supported using only hardware technologies, so embedded software in nodes must not be modified to include coordination algorithms and critical resources (such as the operation time) are not wasted in control operations.
Figure 4 represents the global overview of the proposed technology.
Bit-oriented execution orders can be easily generated by the proposed lightweight gateway, or this functionality may be deployed in a second and new component. In this first work, we are assuming the gateway is in charge of this function (see
Figure 4).
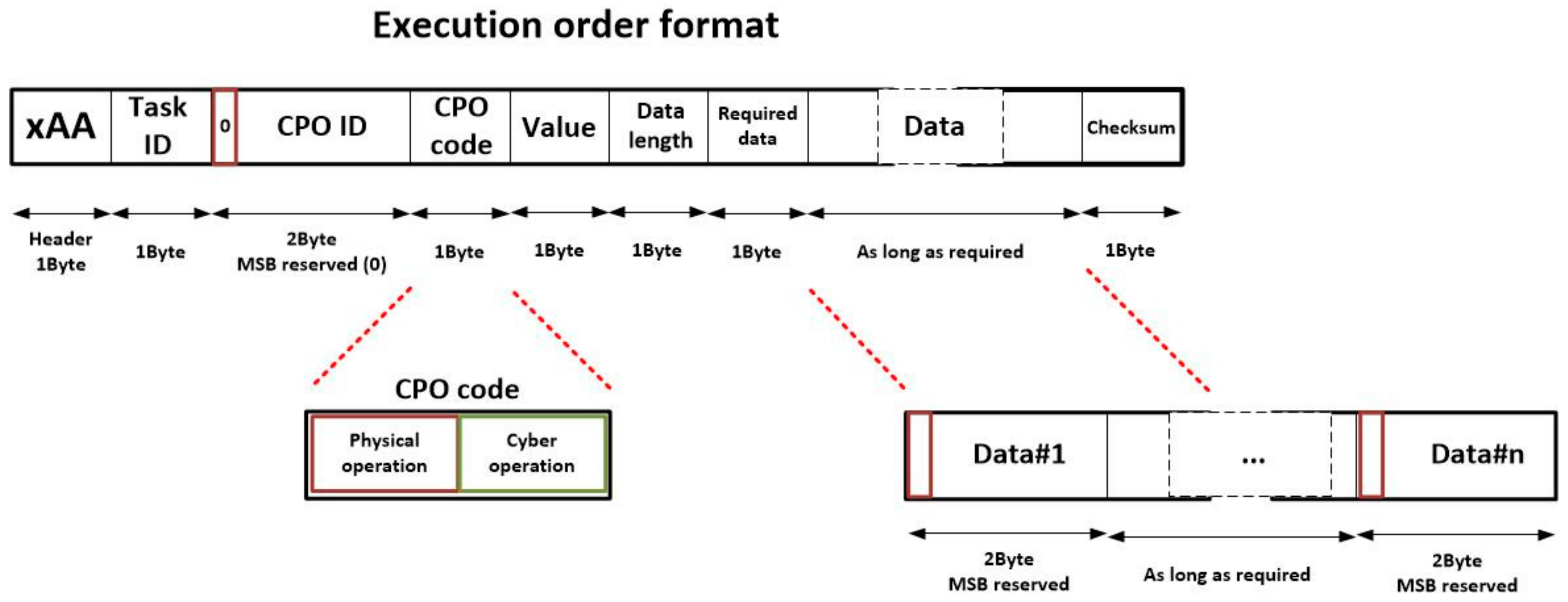
The proposed format for the execution orders may be seen in
Figure 5. This message is needed to require the sensor network to execute a CPO or, at least, to evaluate the possibilities of carrying out the execution. The proposed format is byte-aligned. Eight different fields are considered in each execution order. Namely:
Header (1 byte). The first byte is a header, which must be completed with the hexadecimal value xAA, to indicate an execution order is described by this command.
Task ID (1 byte). This field identifies the delegated task to which the CPO belongs. As maximum, 255 tasks can be executed at the same time.
CPO ID (2 bytes). This field identifies each concurrent CPO univocally. Although 2 bytes are intended for this purpose, only fifteen bits are employed to represent the CPO identifier. The Most Significant Bit (MSB) is reserved and initialized with a binary zero. This bit will be used to link inputs and outputs of CPO in an easier way (see
Section 3.4).
CPO code (1 byte). This field indicated the CPO to be performed. Two hundred fifty-five (255) different operations may be considered in the WSN. In order to simplify the decision process in smart nodes about if they are able to execute an operation, the CPO is divided into two fields. The four most significant bits represent the physical operation to be performed (i.e., the transducers involved in the execution: temperature sensors, LEDs, etc.). If a node does not include that hardware no more processing is required to reject the execution. The four Least Significant Bits represent the cyber operation to be performed (i.e., obtaining an average, sending the raw collected data, etc.).
Value (1 bytes). This field represents the value the operation has for the system. It is obtained as a composition of the importance of the delegated task for the system and the relevance of the operation within the delegated task (see
Section 3.3).
Data length (1 byte). This field indicates how many input data are required (as maximum) to execute the CPO. These data are provided in the adequate field. Each data needs 2 bytes, so the length of the data field may be calculated multiplying by two the value represented here.
Required data (1 byte). This field indicates how many input data are required and essential to execute the CPO. This field is employed to represent the join-type of the CPO [
40]. Three different join-types are possible in YAWL: AND (if an operation is not triggered until all previous operations have finished, so required data is equal to data length); XOR (if an operation is triggered once the first previous operation has finished, so required data is equal to the unit); and OR (if and operation is triggered once a certain number of previous operations -to be selected by the user- have finished, so required data includes a personalized value). Once all required data are available, the CPO is executed.
Data (between zero and 512 bytes, as needed). In this field, all input data of the CPO are represented. Each data requires 2 bytes: the MSB is reserved (it is a flag) and the next 15 bits includes the value of the datum. If the datum is a constant, the MSB is initialized with a binary one and the next 15 bits include the value of the constant. However, on the other hand, if the datum is obtained as the output of a previous CPO, the MSB is initialized with a binary zero and the next 15 bits include the CPO ID of the operation which will produce the datum. The order in which data are listed must be fixed and established for each operation.
Checksum (1 byte). The checksum is obtained as the XOR of all bytes in the execution order except the header. If an order is corrupted, the checksum will not be validated and the order will be discarded.
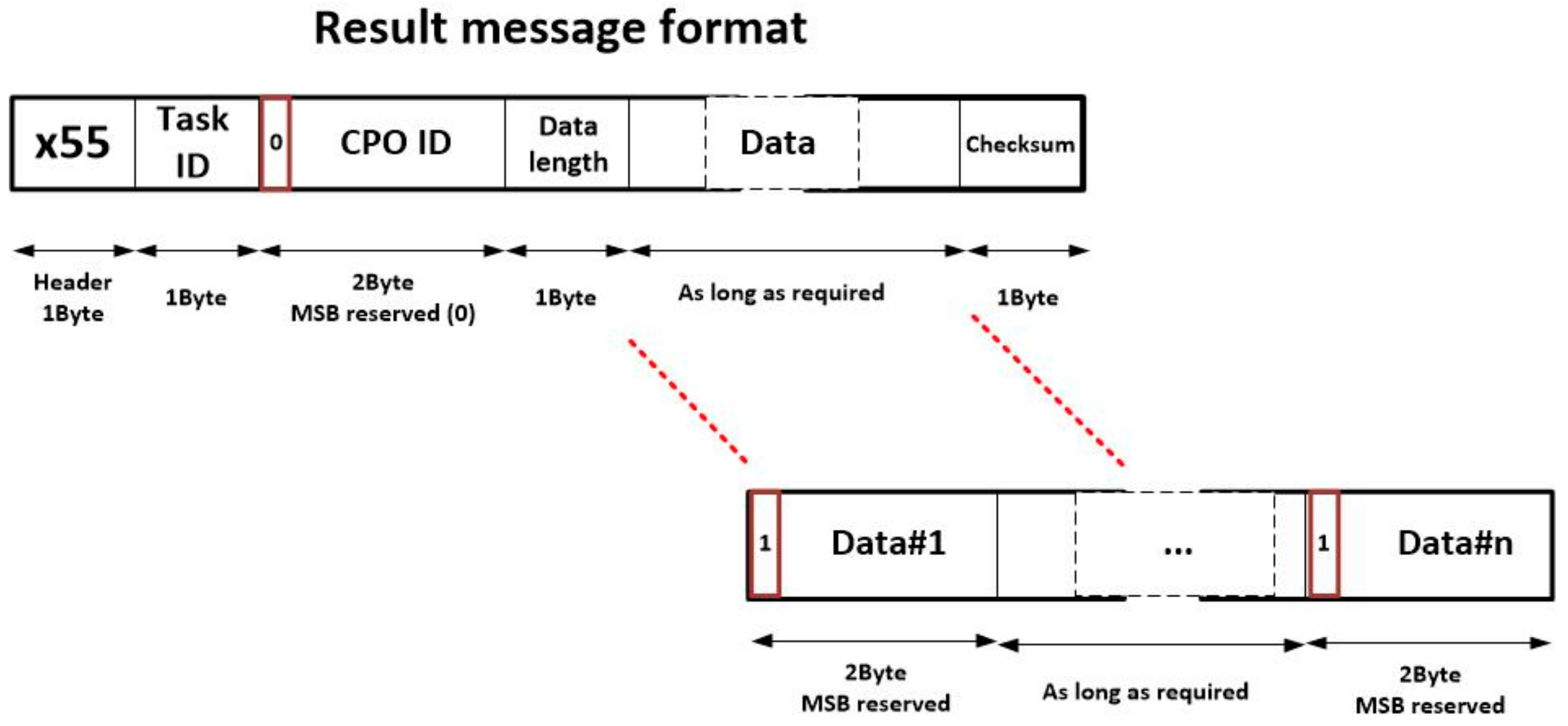
Once a CPO is performed, the corresponding node generates a message including the results of the operation, in order to allow the other nodes to execute the linked operations. This message is needed to update the state of the choreographed task execution. The format of this message is showed on
Figure 6. As can be seen, fields in this new message are similar to which previously presented. In particular, six fields are considered:
Header (1 byte). The proposed header for result messages is x55
Task ID (1 byte). This identifier has the same meaning as explained above.
CPO ID (1 byte). This identifier has the same meaning as explained above.
Data length (1 byte). This field indicates how many output data are generated as result of the CPO. These data are provided in the adequate field. Each data needs 2 bytes, so the length of the data field may be calculated multiplying by two the value represented here.
Data (between zero and 512 bytes, as needed). In this field, all output data of the CPO are represented. Each data requires 2 bytes: the MSB is reserved (and initialized with a binary one) and the next 15 bits includes the particular value of the result. The order in which results are listed must be fixed and stablished for each operation.
Checksum (1 byte). The checksum is obtained as the XOR of all bytes in the result message except the header.
As can be seen in
Figure 3, sometimes workflows may include conditions, in order to select which branch (or branches) in the workflow is executed. These structures can appear depending on the split-type of operations. In YAWL, three different split-types are defined: AND, OR and XOR (with the same meaning that the join-types). Tasks of OR or XOR split-types must include conditions [
40]. Conditions must be also executed, so they are treated as any other CPO (they have a CPO ID, they present cross-references with other operation in the data field, etc.). However, as the code to execute these conditions is not available in the nodes of the WSN (as conditions are defined at high-level by users considering the application scenarios and not the underlying network), they are not executed by hardware nodes. Execution orders of conditions are not neither broadcasted and all of them are resolved by fictional nodes (see
Figure 4). Fictional nodes are virtual instances hosted in the control middleware but they behave and relate with other nodes as any other standard hardware component. In these nodes, the lightweight gateway may deploy dynamically the required code to execute the conditions in the workflow.
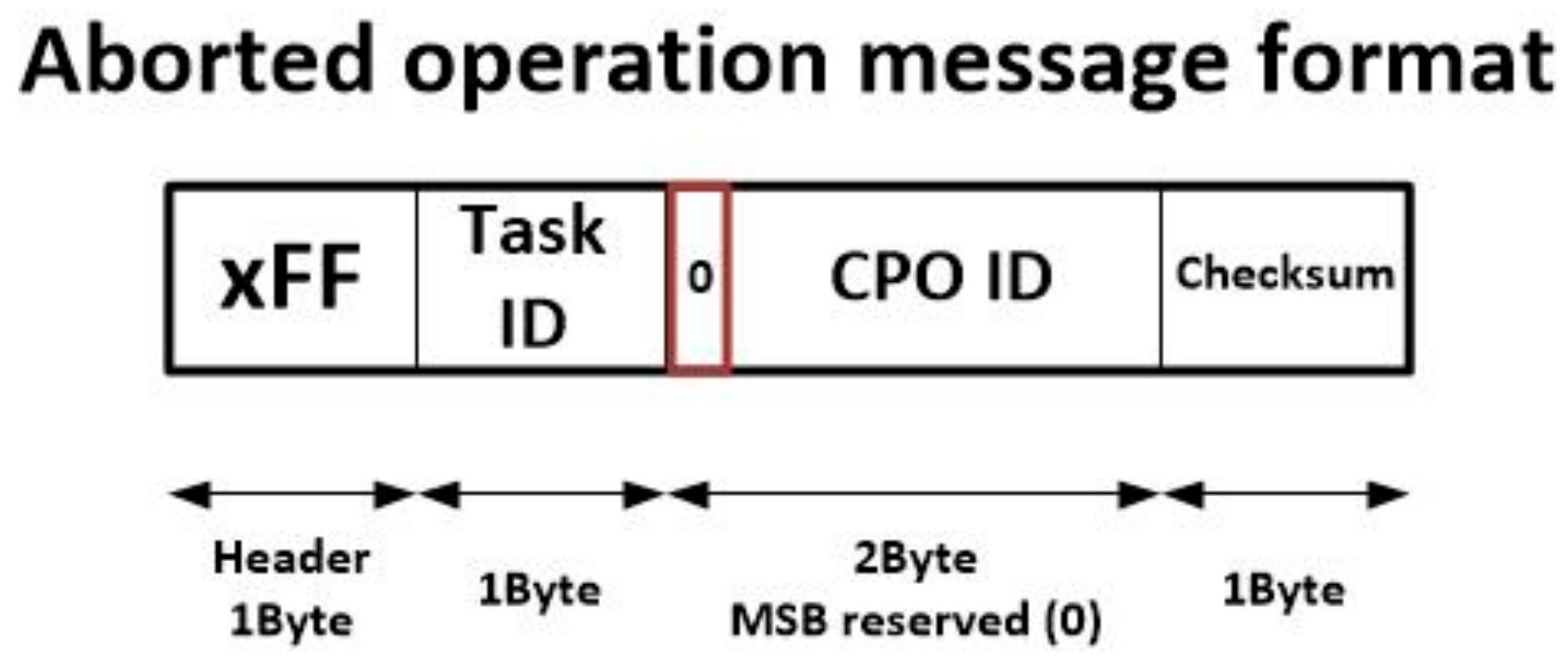
Some conditions will be verified, so a standard result message will be generated. However, other conditions could not be verified and nodes in charge of executing the operations in the cancelled branch (or branches) should deallocate the corresponding resources and be available for new operations. In order to enable that, a new message, the aborted operation message, was included in the proposed task execution protocol (see
Figure 7). This message is much shorter and fields have the same meaning as previously described commands.
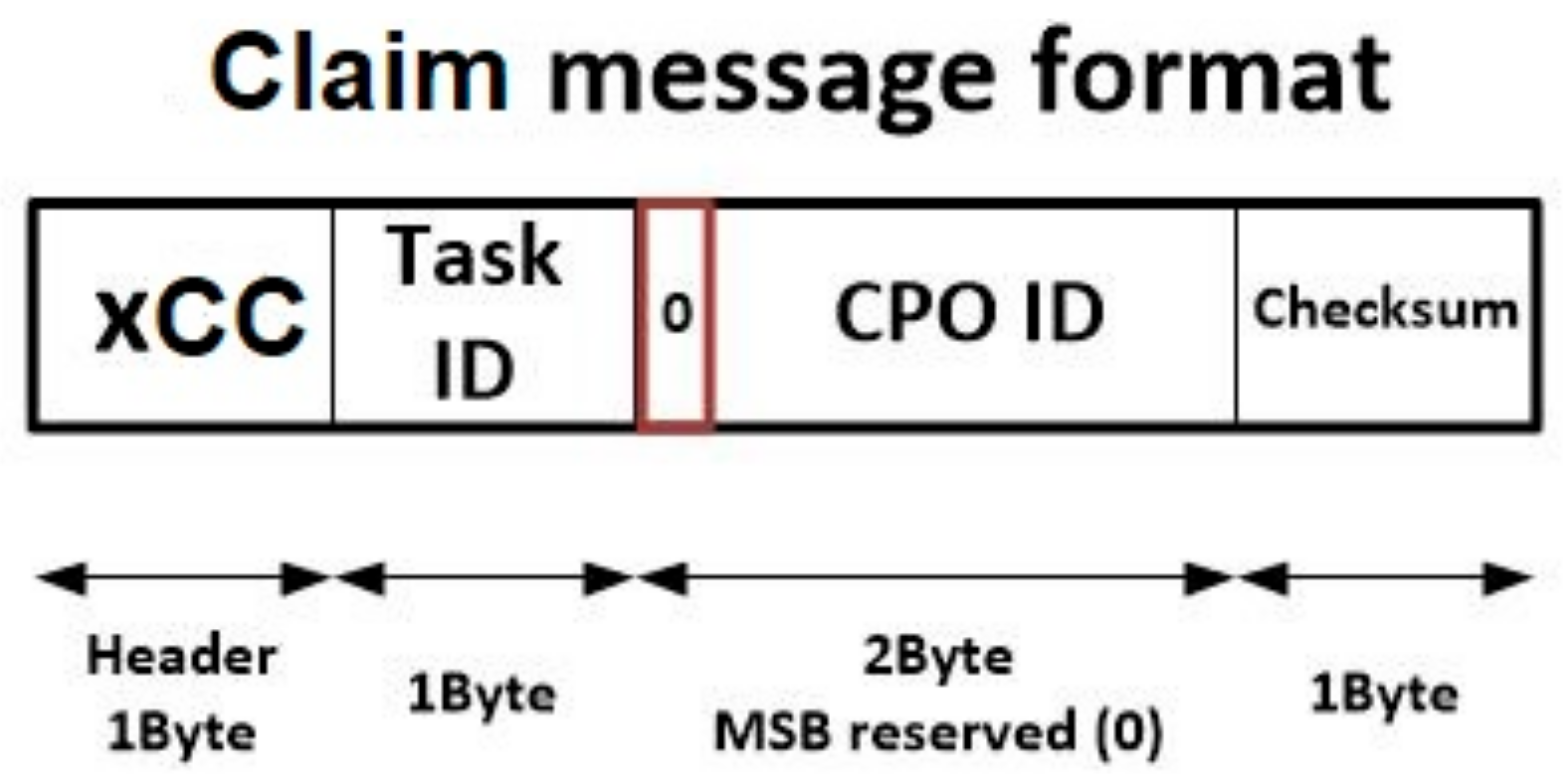
Finally, although at this point the necessity of including this message may not be seen clearly, it a message is needed to enable nodes to claim the right of executing a CPO ordered by the gateway. This last message is named “claim message” and its structure is very similar to the aborted message format, although the header, in this case, is initiated with the value xCC (see
Figure 8). This message is totally necessary, as it is employed to ensure that (in a choreographed execution algorithm) only one node is in charge of executing each CPO. Among nodes willing to execute a CPO, a random mechanism is employed to select the final node responsible of the execution. This node must claim that execution, so the other nodes can renounce it.
Considering the proposed messages, smart nodes in the WSN may execute tasks in a choreographic way, as described in
Section 3.4.
3.3. Network Gateway
The main problem of choreography solutions is that no node in the sensor network has a global understanding of the ongoing situation. In that way, networks implementing these technologies may get congested easily, as no node can reject the execution of a task or operation on behalf of the entire network. Timers and other similar solutions must be considered in this case in order to inform high-level applications that a task cannot be executed. However, those techniques do not enable the premature detection of congestion situations, which makes them very inefficient.
Therefore, in the proposed solution, a lightweight gateway (see
Figure 4) has been included. This gateway does not need to maintain a real-time representation of the network state and only using statistical procedures can detect and prevent the congestion of the network.
A Wireless Sensor Network
may be seen as the union of a family of sets of servers (1). Each set of servers
groups the nodes being able to perform a certain CPO. As, usually, a node may execute various different operations, it may be present in several server sets.
The cardinality of each set of servers (2) is usually unknown, as configuration processes are not able to collect that information in most cases. The total number of nodes in the WSN is
.
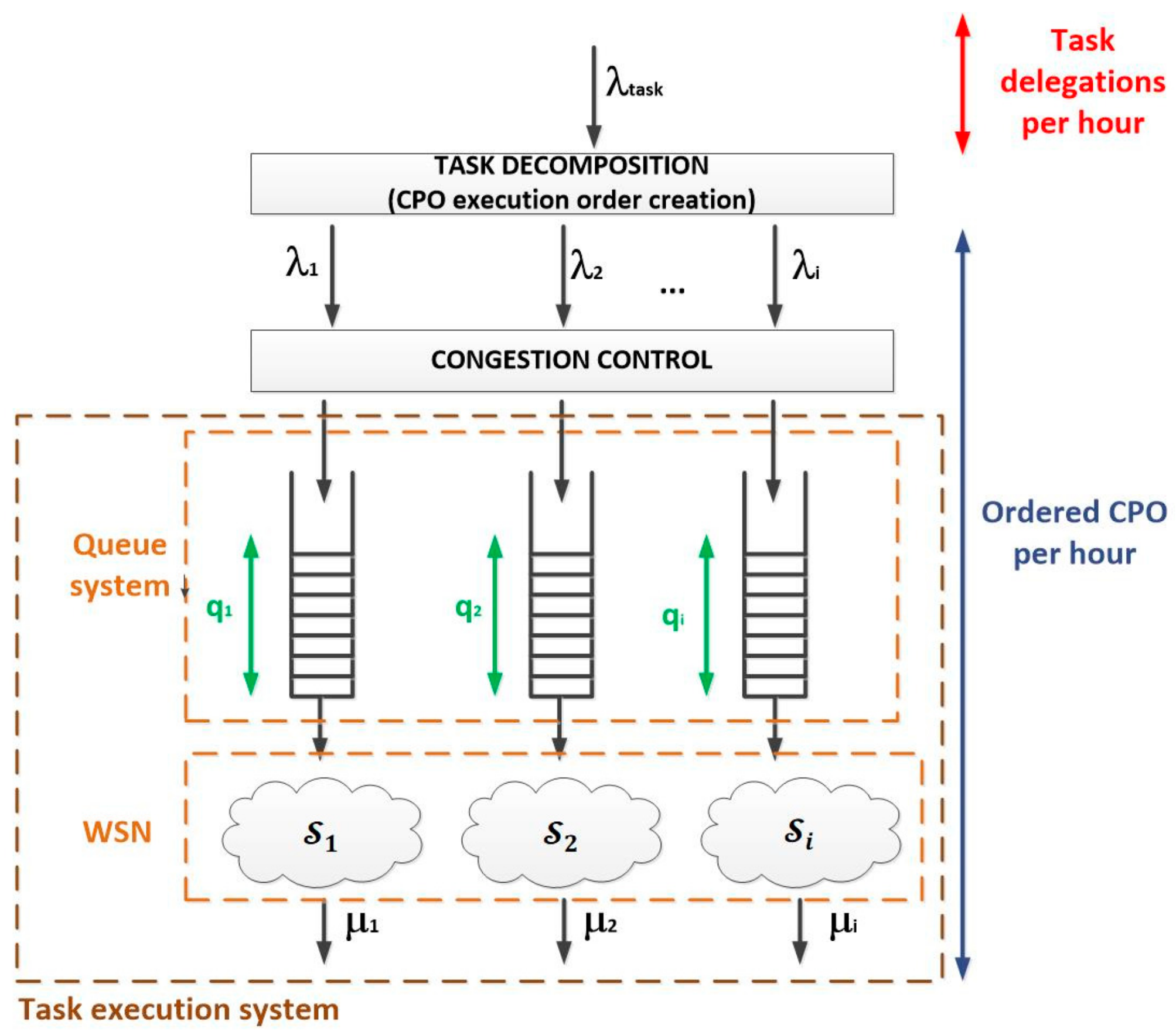
In this context, delegated tasks are received by the WSN in a random manner. Nevertheless, it is reasonable to imagine that the probability distribution of task delegations (and execution of CPO) in time in WSN
is similar to the probability distribution of calls in time in telephony systems (3). In particular, delegations are independent among them and they are equiprobable in time; so a Poisson distribution is the most adequate.
Then, for each server group
, the probability of receiving
task delegations in a time period
is represented by a Poisson distribution with medium
; where
is the average rate of received delegations (or ordered CPO, depending on the point of view, see
Figure 9) by the group of servers
during the time period
.
Experimentally, it is proved that the service time follows an exponential probability distribution in telephony systems. Although no similar results have been obtained for WSN, in this work we are assuming the service time in WSN follows an exponential law as well (4). Hereinafter,
is the medium service time for the group of servers
(i.e., the required time to execute a certain CPO operation by a server within
).
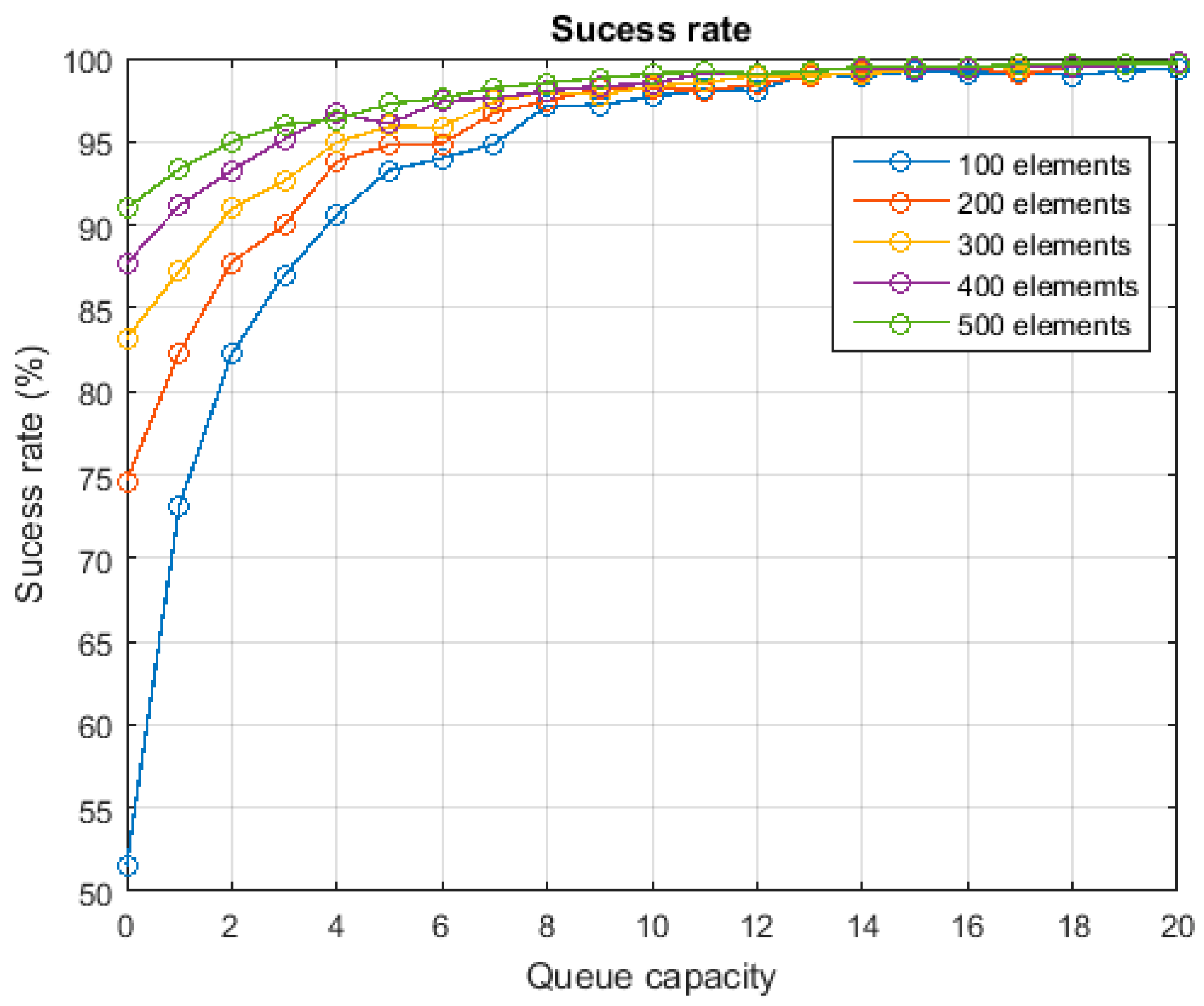
As, in some occasions, bursts of task delegations may appear, for each group of servers it is considered a finite queue to absorb the effect of these bursts. Each queue has a maximum capacity of CPO execution orders. The resulting system is a hybrid queue system whose Quality-of-Service (QoS) is determined by both the waiting time in the queue and the loss probability due to the limited capacity of the queues.
Although this model considers to be defined some assumptions that are met in most cases, the traffic engineering theory guarantees that the obtained results are a good first estimation for all cases, including those which do not fulfil the initial assumptions (for example, if task delegations are periodic). General models as the proposed one by Kingman [
41] could be applied for a more precise calculation.
In this scenario, it is possible to calculate the volume of CPOs
supported by each group of servers
using the Erlang’s theory (5). It is also possible to calculate the congestion factor (or utilization factor)
which represents (if
) a permanent and structural situation of congestion in the WSN (6)
With this approach the situation of the WSN, regardless how great is the node density or the number of nodes, may be represented using only five one-dimensional arrays (with 256 values each one, one value per CPO). These arrays represent the medium task delegation rate, the inverse of the medium service time (or performed-served-operation rate), the number of servers and the congestion factor (and/or the traffic volume) in the WSN (7).
As in standard telephony systems, in this case we are assuming the number of users that try to use the resources of the WSN is very high. However, users have a variable behaviour in time, i.e., the situation of the WSN and the values of the mentioned arrays (7), will vary in time (although this dependency is not explicitly expressed). Because of this variability, in order to dimension systems, key indicators are evaluated during the most loaded hour (such hour when the medium task delegation rate is highest). An important topic in every WSN for task execution, then, will be to guarantee that, at no time, the hourly ordered CPO rate is above the calculated rate for the most loaded hour . The use of these “maximum” values as comparison threshold it will be very important to maintain the network in a stable situation as we are seeing.
Two relevant considerations have to be done at this moment. First, the module of vectors , , etc. may be used as a first evaluation of the situation of the network as a whole. However, the obtained result it is not precise from the traffic engineering point of view. And, second, among the presented arrays (7) only two of them are not modifiable as they depend on the deployed hardware devices: the number of servers and the inverse of the service time . The other three parameters are dependent on each other, there is only one degree of freedom, i.e., only one parameter can be employed as independent variable. In this work, we employ as such an independent variable, which is the basis of the congestion control algorithm to be deployed in the lightweight gateway (see Algorithm 1).
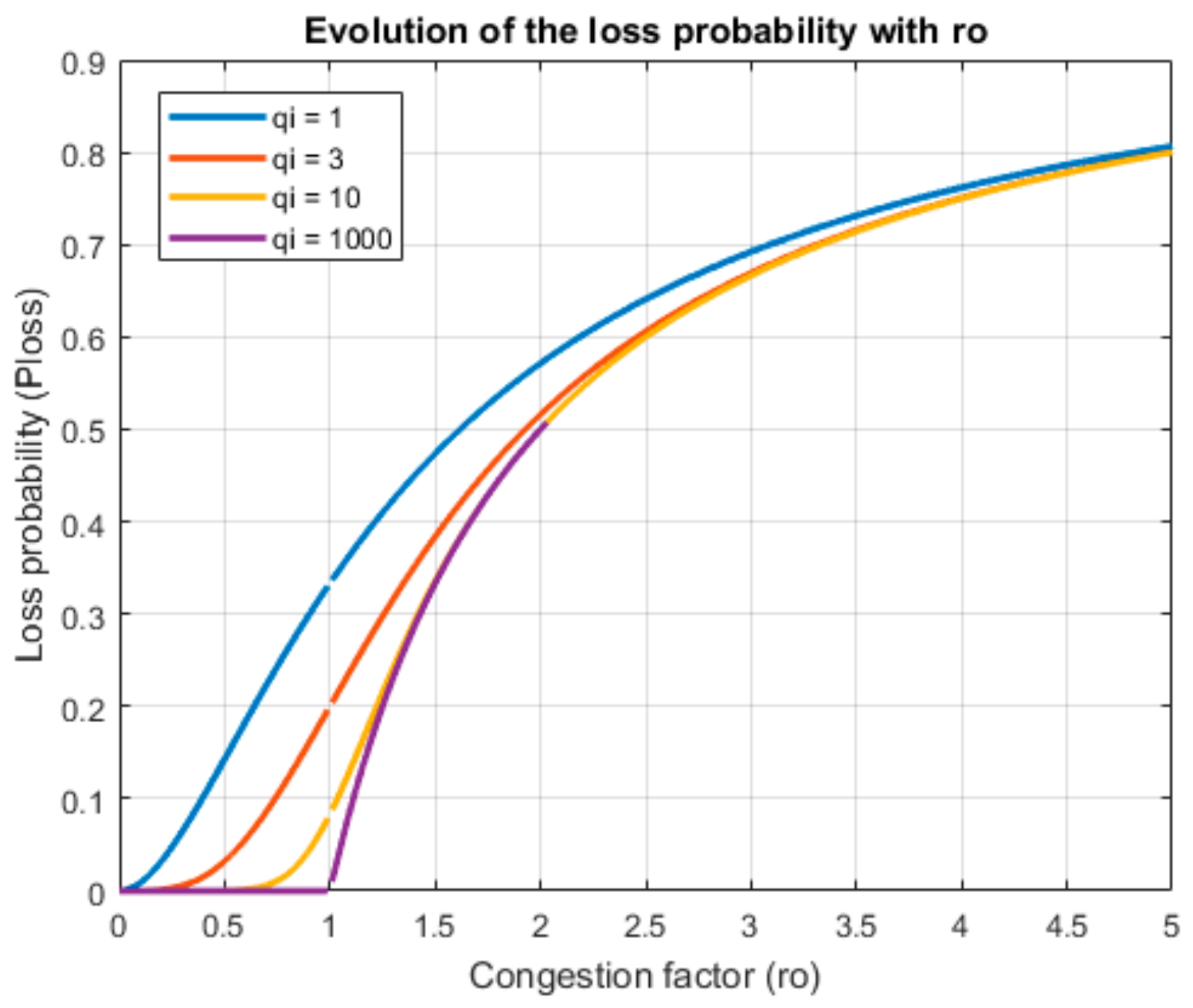
According to the Erlang’s theory, the loss probability any of the previously described queue systems, for each group of servers, is (8). In this work, we are assuming the system must present a certain QoS level, represented by the availability of the system (expressed as probability) for each group of servers,
. Then, the maximum allowed loss probability in the system
is (9). As in the previous case, one-dimensional arrays of 256 elements may be employed to represent the loss probability and availability of the entire network
,
.
With these equations, it is possible to determine the maximum utilization factor and maximum hourly task delegation rate which can support the WSN, to guarantee the desired QoS. There is no analytic solution but it is pretty easy to obtain a numerical one (see
Figure 10).
Using a statistical procedure and a sliding window filter (we have named the “Erlang filter”) only task delegations compatible with the desired QoS will be accepted in the system (see Algorithm 1).
As can be seen (Algorithm 1), the first activity to be performed when a task delegation is received is evaluating the number of CPO of each type which will be executed if the task is accepted. This step is very important, as tasks are delegated as a unique element but they are decomposed into CPO in the WSN. Congestion factors and the other traffic engineering parameters are, then, expressed terms of the ordered CPOs, so it is basic to know how many CPO will be executed per delegated task.
| Algorithm 1 Lightweight gateway (congestion control algorithm) |
| Input: Delegated task |
| Calculate , the set of CPO composing |
| Create an array |
| Calculate the current time in Epoch format |
| for each CPO in do |
| Add one unit to |
| end for |
| Create a Boolean variable equal to ‘true’ |
| for each element in do |
| Calculated the number of ordered CPO between and by |
|
if then |
| is false |
| end if |
| end for |
| if is true then |
| CPO in are introduced in the task execution system |
| end if |
As CPO are identified by one-byte integer numbers, a simple casting of data types enables us to count the amount of CPO of each type that make up the delegated task.
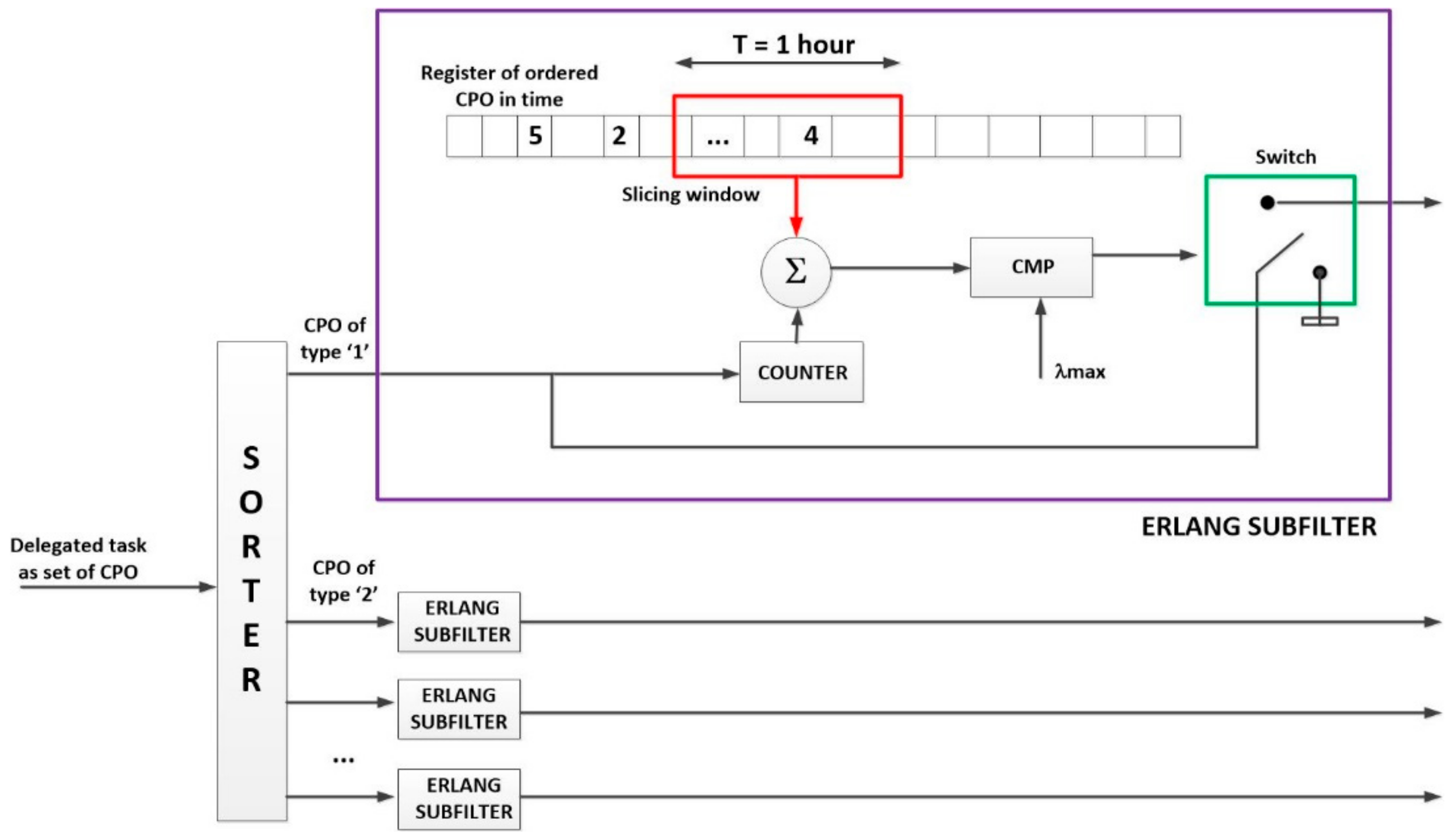
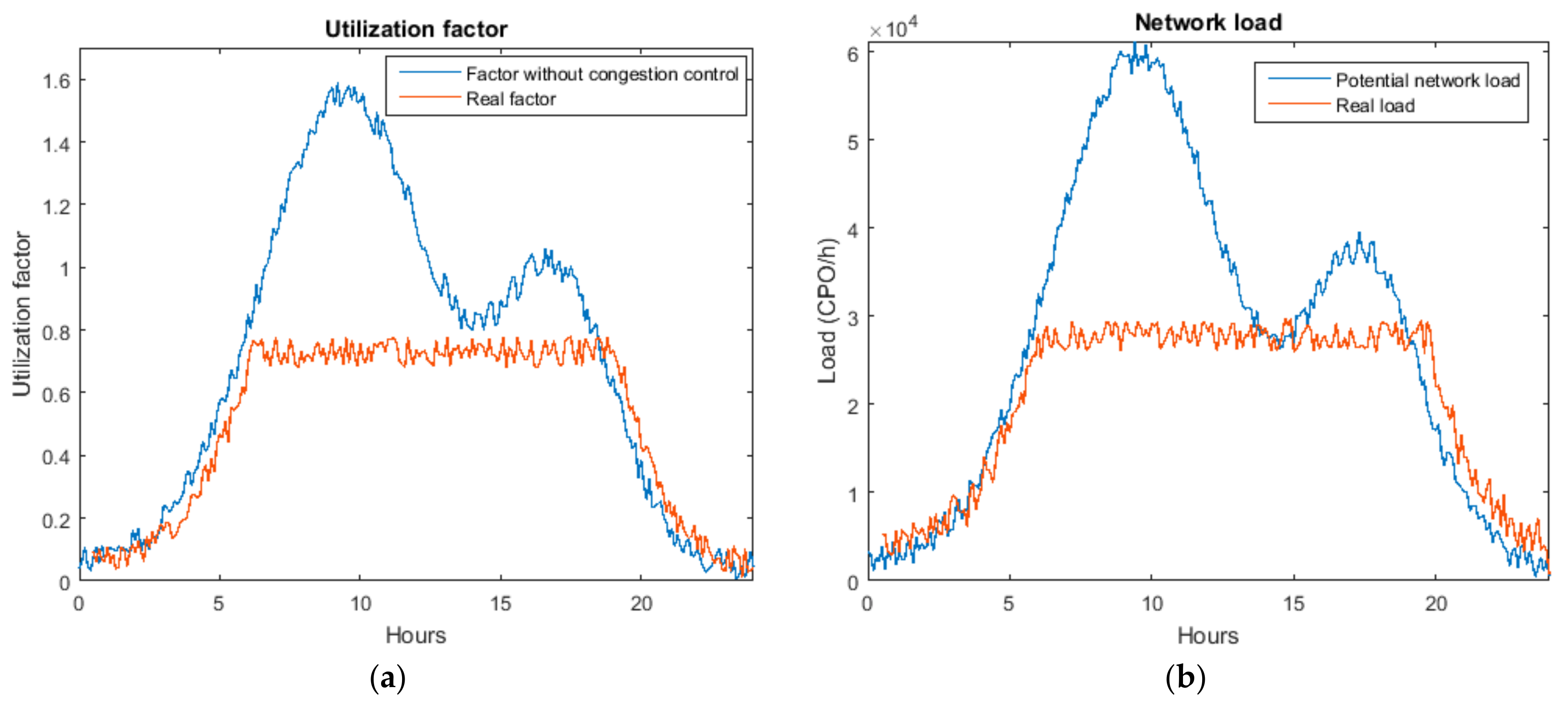
The rest of the Algorithm 1 is the proposed “Erlang filter,” designed to avoid the congestion in the system. Even if queues in the devices and/or the gateway could store more CPO than admitted by this filter (for example, if queues were infinite), the system becomes unstable if the utilization factor is higher than one, so this filter prevents the queue system to reach that point (see
Figure 11).
The basic idea is to store a historical register of the amount of ordered CPO (not received tasks, as rejected tasks must not be included) in time. A slicing window with a width of time units (usually an hour to be coherent with the traffic engineering principled) moves through the registry and accumulates all the operations that fall within it. The value of parameter should be chosen to be large enough to remove the random fast variation in the task delegation flow; but short enough to allow observing the slow variations that occur throughout the day. Although specific values for particular applications could be calculated, the traffic engineering theory has proved that, in the general case, one hour is a good balance between both requirements. If the accumulated value (considering also the number of operations which will be introduced if the task is accepted), for any server group, is higher than the maximum allowed hourly medium CPO ordination rate, the delegated task is directly rejected, no operation is introduced in the queues.
Thus, a key problem is to calculate the maximum allowed hourly medium CPO ordination rate
for each group of servers. Considering that, as said, the maximum value of the congestion factor is obtained to fulfil the requirements of the desired QoS; and
and
are imposed by the hardware characteristics of the WSN, this maximum rate is easily calculated (10).
Then, it is necessary to calculate the values of
and
of the underlaying WSN. The calculation of
is simpler and it is showed in Algorithm 2. On the other hand, Algorithms 3 and 4 are designed to estimate the value of
, which is more complicated as this parameter cannot be directecly measured.
| Algorithm 2 WSN parameter calculation. Service time |
| Input: Circular matrix of service time measures |
| Array of CPO to be executed |
| Output: Medium service time |
| Obtain the current date in Epoch format, create a variable |
| Create an integer equal to one |
| while is higher than zero then |
| is equal to the addition of elements in |
| Wait for the result of an operation |
| Subtract one unit to |
| if received result is not a cancellation then |
| Obtain the current date in Epoch format |
| Store the new measure in in the row |
| end if |
| end while |
| for each server group do |
| Integer is equal to number of non-zero elements in i-th row of |
| is equal to the addition of all non-zero elements in i-th row of |
|
|
| end for |
| Algorithm 3 WSN parameter calculation (1) |
| Input: Delegated task |
| Previous estimation of (if exists) |
| Output: Estimated |
| if it does not exists then create a Boolean variable equal to True |
| if is true then |
| Calculate , the set of CPO composing |
| Create an array |
| for each CPO in do |
| Add one unit to |
| end for |
| CPO in are introduced in the task execution system |
| else |
| Algorithm 1 |
| end if |
| Create a Boolean variable equal to ‘false’ |
| if all queues in the task execution system are empty then |
| is equal to True |
| end if |
| if execution orders have been sent to the execution system then |
| Algorithm 2 |
| Configure a timer |
| Wait for the result of the delegated task |
| if timeout and result is not received then |
| Send a cancellation message for all CPO |
| if is True then |
| is false |
|
else |
| All elements in are divided by two |
|
end if |
| else |
| if is equal to True then |
| Algorithm 4 |
| end if |
| else |
| Generate a random number |
| if is higher than threshold then |
| CPO in are introduced in the task execution system |
| Configure a timer |
| Wait for the result of the delegated task |
| if timeout and result is not received then |
| Send a cancellation message for all CPO |
| Return |
| else |
| if is equal to True then |
| Algorithm 4 |
| end if |
| end if |
| Update threshold |
| end if |
| Algorithm 4 WSN parameter calculation (2) |
| Input: Array of executed CPO |
| Array of CPO being executed |
| Previous estimation of (if exists) |
| Thresholds and |
| Output: Estimated |
| Integer is the addition of elements in and |
| Integer is the addition of elements in |
| if is higher than then |
| Calculates the p-value using the Mann-Whitney U test |
| if is smaller than and higher than then |
| is obtained as the average of and |
| else if is smaller than and smaller than then |
| is equal to |
| end if |
| end if |
Because of the need of listening all interactions among nodes in WSN to estimate the medium service time, Algorithm 2 should be hosted in fictional nodes (see
Figure 4), which are virtual entities maintained and supported by the gateway. The proposed Algorithm 3 considers a circular matrix where measures about the service time are stored (columns represent different time instants and rows different server groups). The number of elements per row
represents the number of measures employed to calculate the medium service time.
Algorithm 2 receives information about the amount of CPO of each type to be performed. Then, it waits until all of them have been executed, or cancelled (in this case the new calculated medium service time will be equal to the previous one because of the algorithm design). Considering the initial time when the delegated task was triggered and the finishing time of each CPO, a new measure of the service time is obtained (and stored in the circular matrix). It is important to remark that, as we are seeing in
Section 3.4, resources of nodes get “allocated” once CPO are broadcasted and accepted. Thus, although an important time of the service time may be employed in waiting until the previous CPO in the task workflow are finished, it must be considered the whole time since CPO executions are ordered.
Once all CPO have been resolved, executed or cancelled, the medium service time is evaluated considering the new data and all previous samples. It is important to note that, if we assume the WSN is not congested, the service time may be considered independent from the hourly task delegation rate (and only dependent on intrinsic hardware and software factors). Thus, all measures can be employed to calculate the average, regardless the moment and external conditions when they were acquired.
Moreover, as these kind of “learning algorithms” require a certain time to converge to a stable value (while enough data are accumulated), only non-zero values in the buffer of measures will be considered to obtain the medium service time.
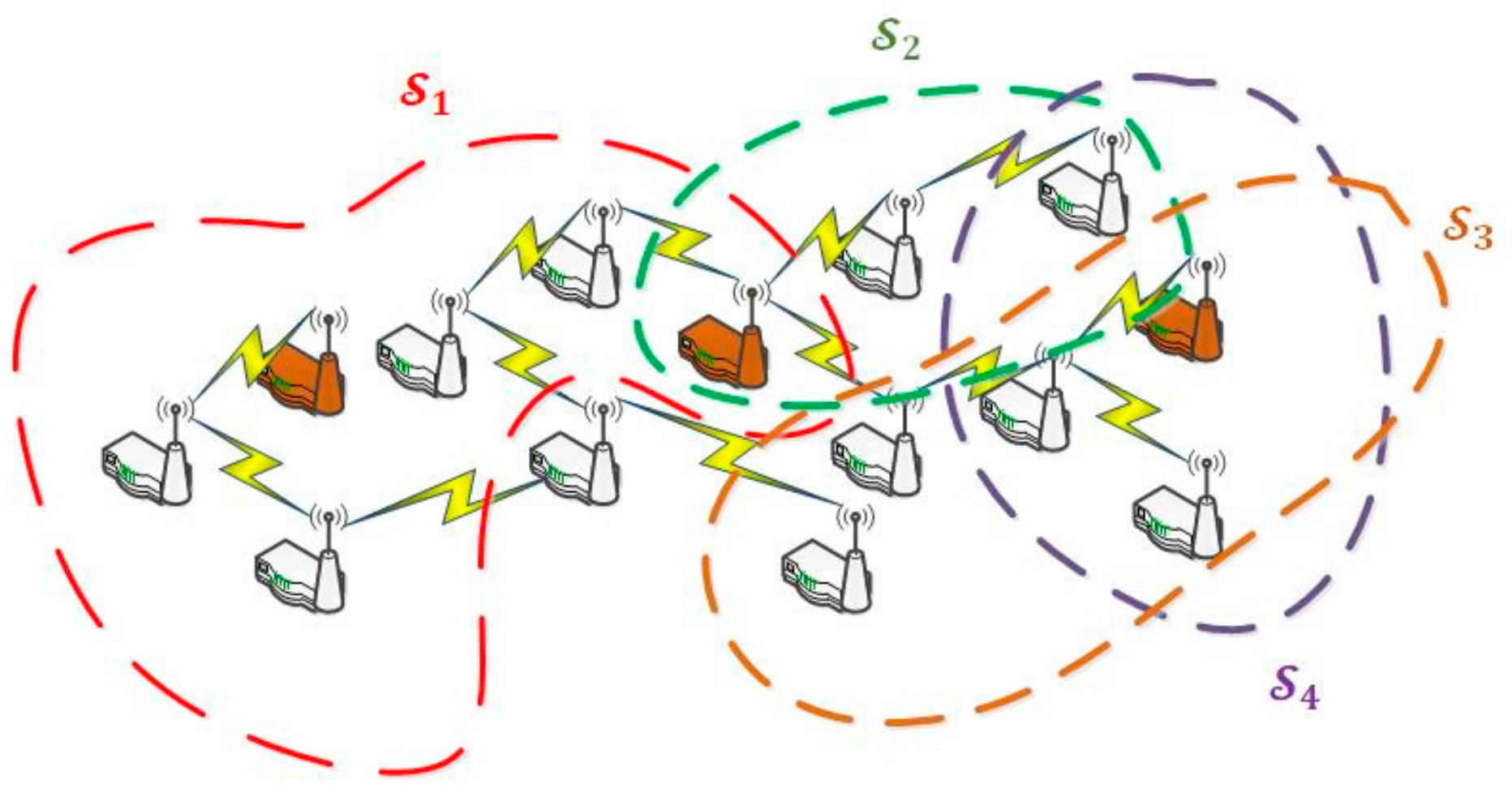
Algorithm 3 is the most complex algorithm to be described in this work. It makes reference to all previously described algorithms, as the evaluation of the number of nodes of each type in the WSN is a key problem without a simple solution. As we said, nodes are considered servers in our model, grouping them according to the CPO they can perform. As, usually, each node can perform various CPO, the same node might be included in various server groups (see
Figure 12). Nevertheless, at each time instant, a hardware smart node may only act as belonging to one group
(i.e., it can only perform a CPO at the same time, as sensor nodes usually do not allow parallel programming), although this association can change over time.
When estimating the number of servers per group, , however, it is desirable the values to be stable over time. Oscillating variables cause the algorithms to behave in a random way and we could no guarantee the WSN is not congested. Although different policies may be employed to fix stable values for (e.g., distributing the nodes homogeneously among the shared groups), in this case these values are adjusted to the real use demand of the different server groups. Then, server groups receiving more CPO execution orders will include more shared nodes than less used groups.
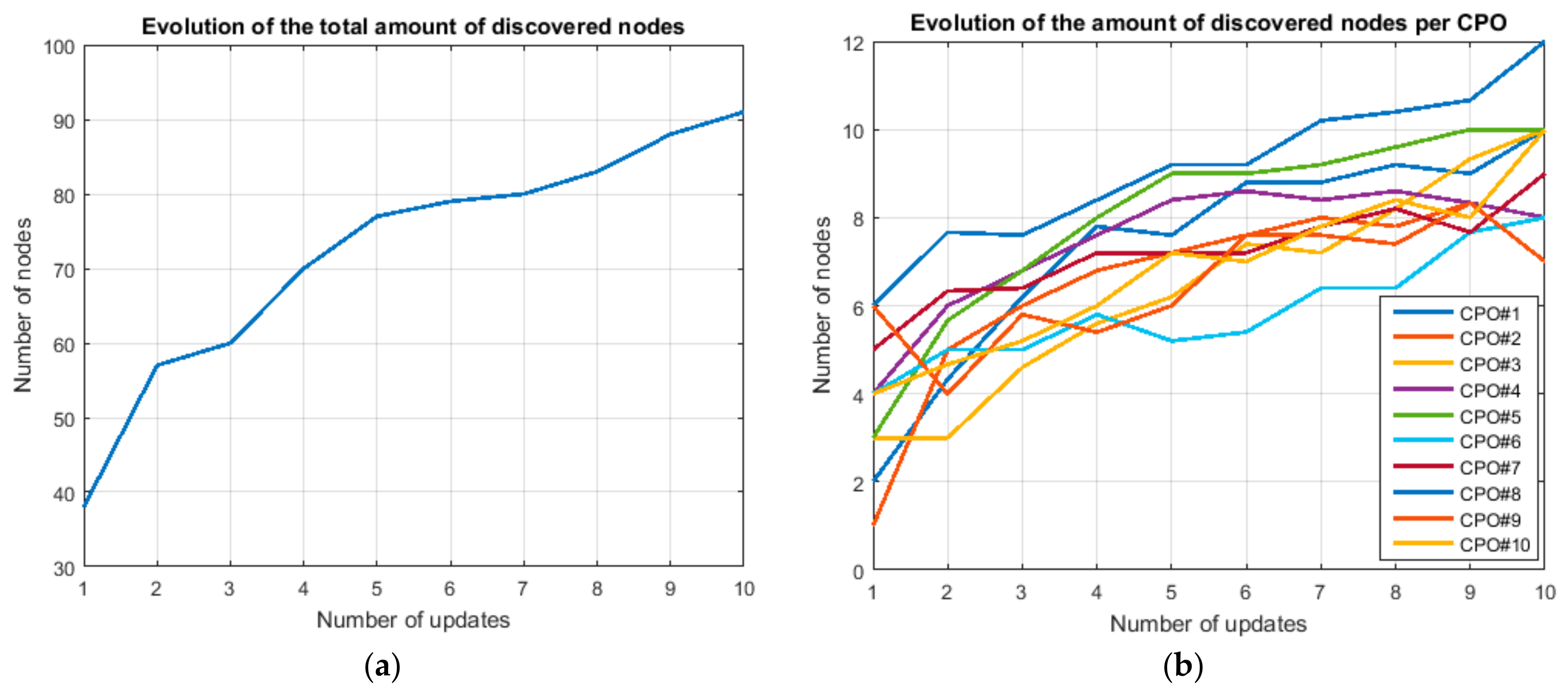
The manner in which Algorithm 3 does this data inference is by monitoring the real capacity of WSN to execute the delegated tasks. During the initialization period, most common operations will need more nodes to be executed and Algorithm 3 will include these nodes in the adequate group, although they could execute other different CPO.
Algorithm 3 considers a first initialization period, when no control about the WSN congestion is performed. Information about the underlying hardware is collected during this time, which finishes once the WSN is not able to execute a delegated task (i.e., when a previously configured timer expires and no result is received). At this moment, the number of nodes in each server group is fixed to be equal to the last value for which tasks were successfully executed.
If a congestion situation is detected (because a delegated task is not executed when the maximum allowed rate has not been exceeded) and the initial time is over, the current number of nodes in each server group is divided by two. From this point, the number of nodes in each server group should be updated until reaching its real values. This policy, in fact, must be proved to be successful in other congestion control solutions such as TCP.
Using only the previously described technique, the number of nodes will be always fixed to the value calculated during the initialization period. In order to update this value, for example if new devices are added or during the recalculation process after a congestion situation, tasks marked to be rejected can be finally processed. If these tasks are not executed by the WSN, the number of nodes is not updated. On the contrary, if these tasks are in fact executed by the WSN, that may mean more nodes than the system knows are available and vector is updated according to this new information.
In order to select which tasks marked to be rejected are finally processed, a statistical process is developed: a random number is generated, if the number is higher than a threshold, the task is tried to be executed. The key problem in this solution is, then, the calculation of the threshold
. This threshold has to be smart and have memory, as depending on the result of previous discovering attempts it should be more difficult or easier to do a new attempt. Considering these ideas, the proposed function (11) to calculate the threshold
includes two branches, depending on if the previous discovering attempt was successful (
) or not (
).
The proposed function is based on the geometric series, it is recursive and evolves between zero and , where is maximum number the random number generator in Algorithm 3 may deliver. In order to maintain the total randomness at the beginning, the initial value of this threshold is designed to be . The proposed function is inspired on the traditional congestion control mechanisms, that may be found (for example) in most implementations of the TCP protocol. These solutions consider exponential-like functions (like the proposed one) as they allow making the most of network resources and detect congestion situations more quickly.
The last detail to be discussed is about the updating algorithm of array . If all queues in the task execution system are empty, it is guaranteed that all pending and ordered CPO are been executed simultaneously. Then, the number of nodes in each server group must be, at least, equal to the number of CPO being executed at the same time.
If the number of discovered nodes is higher than the previously known amount, then, the vector should be updated considering the new information. However, as each node can perform several different CPO, small differences may appear but not due to the discovery of new nodes but because of movements of nodes among different server groups. Therefore, before updating the vector it must be guarnteed that the new array presents a globally and significant improvement in the number of discovered nodes in respect to the previous values. In order to do that, Algorithm 4 considers a statistical test: the Mann-Whitney U test. The Mann-Whitney U test is a nonparametric test of the null hypothesis that two samples come from the same population against an alternative hypothesis, comparing the mean values of the two samples. It is used to evaluate if two different data populations are similar or different (higher or lower). The p-value indicates the significance level of Mann-Whitney U test.
Using this test, only when a significantly better array is calculated, the values in are updated. In practice, two different thresholds for the p-value are considered. The first one determines if array must be updated or not. The second inicates if the actualization must be total (the new vector replaces the old one) or partial (both arrays are combined, in this case calculating the average).
3.4. Choreography Algorithm
Using the previously described smart algorithms, we guarantee the WSN remains in a stable state and choreography algorithms are, then, guaranteed to be effective. Besides, as the state of the WSN may be represented using a data structure with a fixed memory consumption, independent from the number of nodes in the WSN, the gateway may be lightweight and operate at real-time. Considering these previous results, a hardware-supported algorithm is a valid solution to enable smart nodes in WSN to self-manage their resources and execute tasks in a choreographed way.
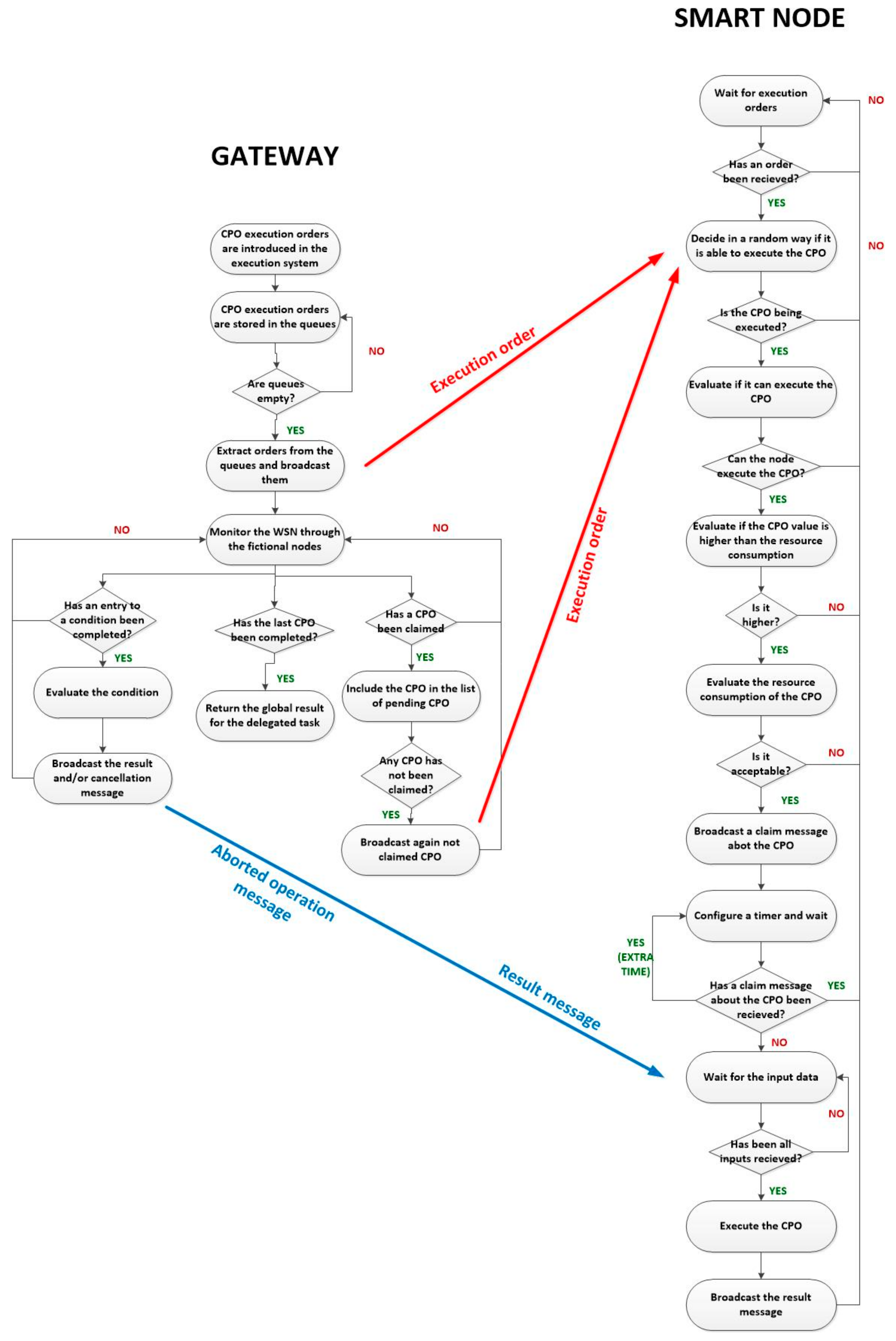
Figure 13 shows the workflow of the proposed smart self-management and choreographed task execution algorithm for WSN. The algorithm starts when the gateway introduces the corresponding CPO execution orders of a delegated task in the execution system. When nodes get available, those orders are extracted from the queues and broadcasted within all the WSN (using the message described in
Section 3.2). When nodes listen these execution orders, each one decides randomly, CPO by CPO, if they would be able to execute that operation. This decision can be made using a random number generator and a fixed threshold (if the generated random number is above the threshold the CPO is admitted). After a certain time and as node density is very high, all CPO will be tentatively accepted by several different smart nodes. At this moment, before doing any additional processing, the node verifies if it can perform the required CPO. If the ordered CPO is not among the operations the node may solve, all resources are deallocated and the node returns to the initial value. On the contrary, the self-management functions are activated.
Then, if CPO is tentatively accepted, each node must evaluate two conditions in an autonomous manner. First it must be guaranteed the value of the CPO to be performed is higher than the current value of the “gas” remaining in the node. In this context, the notion of “gas” may be understood as a homogeneous variable, obtained from the aggregation of remaining resources. As the remaining amount of “gas” goes down, its value increases. Only operations whose value is higher than the value of the “gas” they are going to consume are executed. Second, apart from the value of the “gas”, the node must evaluate if it has enough resources to execute the CPO. For example, although the value of the CPO was the highest, the operation could not be executed if it requires more than a certain time (because the node was very demanded), it would run out of battery, etc.
These two decisions represent the self-management capacity of smart nodes, as they can manage their resources in an autonomous way. Later, both processes will be explained with details.
If both previous conditions are verified, the CPO is finally accepted by the node. When an operation is accepted, the node runs a timer initialized with a random time. At timeout, the node will generate and broadcast a claim message about the accepted operation. However, if before timeout, the node receives a claim message from another node (which configured the timer with a lower value), all resources are released and CPO is not executed.
Two considerations have to be done. First, if (because of the randomness of the process) a CPO is not accepted by any node, the gateway, when no node claims the execution, will broadcast the execution order again. The entire task execution is aborted if a CPO cannot be executed after various attempts. Second, as messages need a time to be transmitted, at timeout (after broadcasting the claim message), an extra time for listening for claim messages from other nodes is considered. Claim messages received during this extra time are considered to collide. In order to resolve this situation, a new random timer is configured and the process is repeated but only by the nodes that collided.
The proposed mechanism to decide if a CPO is finally executed may seem complicated but once implemented using hardware technologies, the entire algorithm will be executed almost instantly.
After all this process, only one node will be in charge of executed each CPO in the delegated task. CPO associated to conditions in the workflow of the delegated task are directly assigned to fictional nodes, through which the gateway also monitors the behaviour of the hardware devices in the WSN.
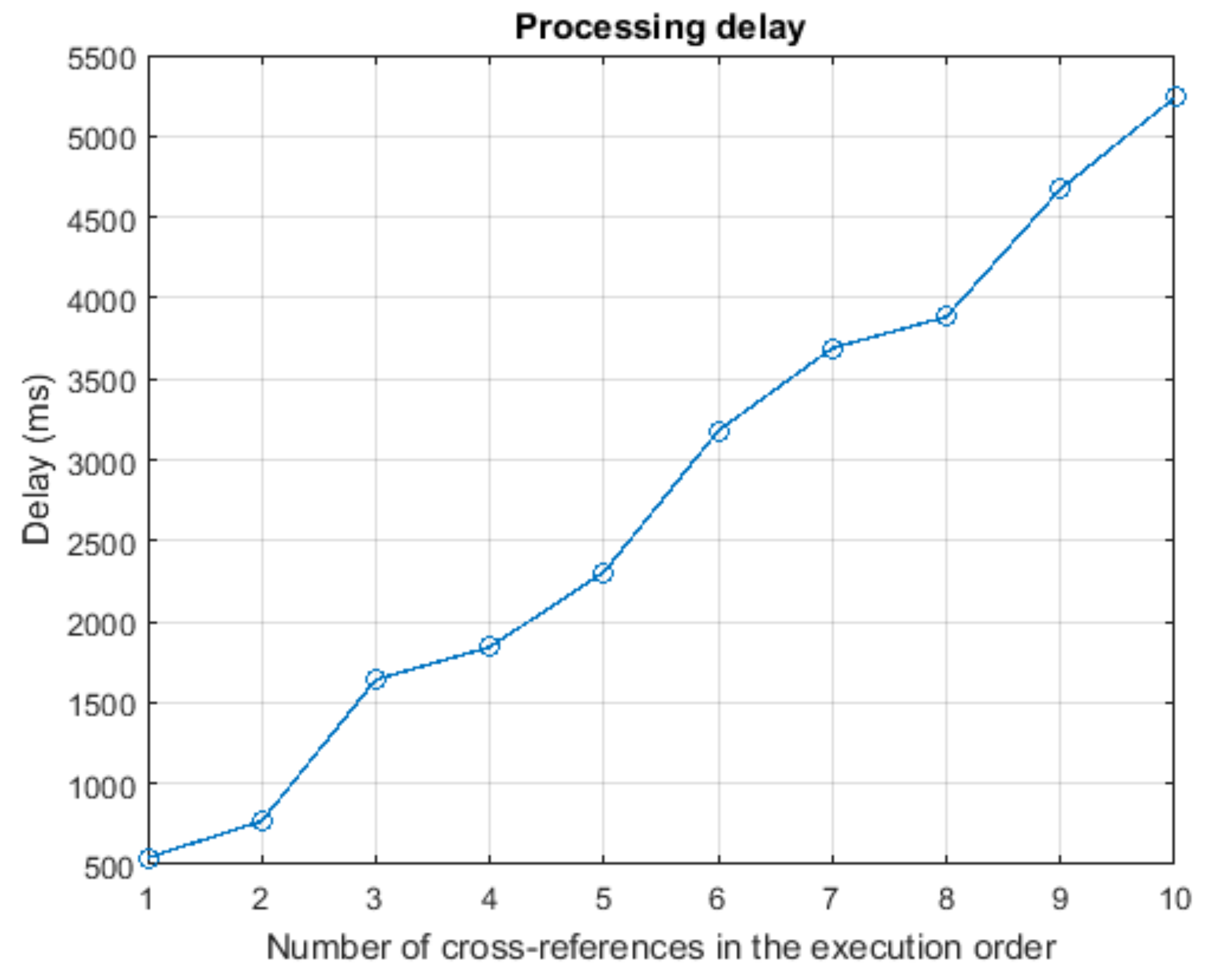
CPO whose input data are only constants (the corresponding flag in those fields is fixed to a binary one) are directly executed. When a CPO is executed, the corresponding node broadcast a result message, describing its output. In that way, all nodes in charge of CPO whose input data refer to this operation will be able to replace this reference by the final constant value to be employed (the obtained result). Once the number of “required data” by any CPO is reached (because all the needed cross-references with other CPO have been solved) the CPO is directly executed and its result broadcasted.
The gateway, once received the result for the last CPO in the workflow in the delegated task, returns the global result of the execution (equal to the result of the last CPO) to the high-level applications.
The proposed algorithm solves the choreographed execution of tasks in the WSN, however, self-management functions require a more detailed discussion.
The idea of “gas” is a global representation of the available resources in a node. The initial amount of gas in a node is a parameter of the proposed algorithm. In order to prioritize the most important CPO at each moment, as the available resources go down, the gas is scarcer and then more valuable. Only CPO whose value is higher than the value of the gas it is going to consume are executed. In the proposed solution, the amount of gas each low-level instruction consumes in each node is fixed, so the amount of gas required to execute each CPO is also known and fixed. If the CPO is executed, the amount of consumed gas is subtracted from the remaining gas in the node. The problem, then, is evaluate the value of this gas.
As in standard economic products, the value of each unit of gas follows an exponential evolution. As gas is scarcer, its value increases in an exponential way. In order to make comparable the CPO value and the gas value, both variables take values within the interval
(12). Several different works have proved that (in standard economy), as the available quantity of a product decreases, its price rises exponentially [
42,
43]. Since the resources of the sensor network are consumed, ultimately, by the users who order the task delegations, it is reasonable the cost to grow in the same way that the price of any other resource, as it gets scarcer.
In the proposed assessment function, represents the amount of remaining gas at the current moment. reprsents the desired initial value for each unit of gas, as a minimum value . represents the desired final value for each unit of gas, as a maximum value . Finally, is the inflaction constant. It indicated how fast the value of the gas increases. Approximately, for the gas reaches its maximum value.
Although this expression may seem complex, in fact only one variable is present, . The other parameters are design constants with a fixed value. The idea of “gas” can be employed, besides, to implement enhanced QoS techniques, even though in this paper we are not considering this option.
The implementation of exponential functions using logical gates and similar hardware solutions it is very complicated. Therefore, in order to only employ binary adders and multipliers in the proposed hardware-supported algorithm (thus, the solution can be implemented using microelectronic techniques), the Taylor’s series of the proposed function is calculated and employed (13).
Regardless the value of gas, smart nodes should consider other limits: they should never spend all their resources; they should be operating during, at least, a minimum time to be profitable, etc. In order to fulfil these requirements, nodes should be able to predict the future state of their resources at each moment.
The state of the resources in a node may be represented through a column vector
(14), where
is the number of resources to be considered. The resources of the entire WSN can be represented, then, by means of a matrix
where each column represents a different node (15).
In this context, the future state of the resources in the WSN, at any moment, could be evaluated through a dynamic system
depending on the current state of the resources and a stochastic process representing the task delegations. This stochastic process
, as said, follows a Poisson’s distribution (16).
If we particularize the model in a unique node, parameters in the dynamics might be divided into three elements (17): a column vector representing the resource self-management in the node (the future state of resources depends on the self- management policies applied by the node); a matrix
, named choreography term, representing the resource state in the rest of the WSN (because of the choreography algorithm, the resource consumption in nodes depends on the behavior of the other devices); and the previously described stochastic process
.
From the point of view of a particular node, the impact of the choreography term in the consumption of its resources is a random contribution, as it does not have information about the management the other nodes do with their resources (18). This random contribution can be understood as a stochastic process
representing all CPO the other nodes have not accepted. As nodes in the WSN operate in an independent way and there are a high number of them,
may be assumed to be a Possion distribution (18). Stochastic terms may be, finally, grouped (19).
At this point, the proposed model using differential equations and continuous time must be transformed to a model with finite differences and discrete time (20). Besides, if we assume that all resources are independent (the memory consumption is independent from the battery discharge, for example), the dynamic model can be divided into a system of
independent Equations (21).
Using this model, it must be guaranteed that no resource, during the planned operation time, goes below a certain acceptable limit . These limits are calculated to gurantee the minimum survival of the node.
Each node will perform short measures (e.g., ) in order to estimate the medium value stochastic term. Using this information and the resource evaluation laws , the node will calculate the resource state at the end of the planned operation time and if it is smaller than (for any resource) the CPO will be not accepted.
The final detail to be discussed are the definition of the resource evolution laws . These laws must be defined before implementing the proposed algorithm using hardware technologies. They depend on the resource to be studied (for example battery charge presents an exponential evolution but memory usage follows a linear law) and should be transformed into Taylor’s series if the corresponding evolution law does not present a polynomic form (so it can be implemented using binary adders and multipliers).
Considering all previous details, it is possible to propose a schematic hardware implementation. The objective of this paper is not to describe a complete low-level hardware implementation which, even, could be performed using solid state devices and microelectronic techniques in order to improve the integration level. However, some important components and signals in order to understand the behaviour of the proposed hardware-supported algorithm are identified.
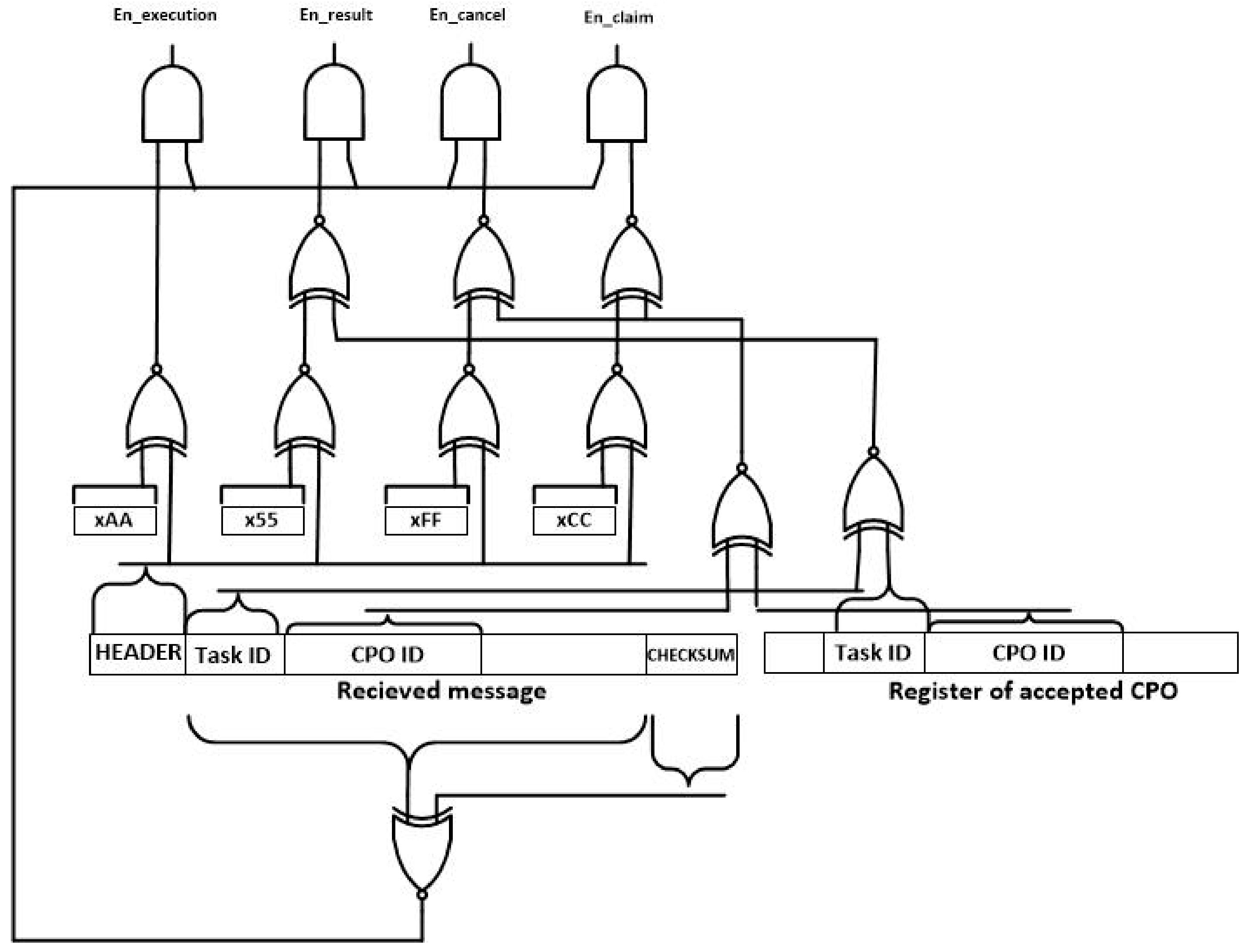
The first module to be considered is the enable signal generation (see
Figure 14). In this module and using the binary header of messages (se
Section 3.2), the signals that activate the processing of the received message are generated. In order to do that and using XNOR logical gates, the header of the received message is compared to the four possible headers. Only the gate where both entries are equal produces a logical one at its output. Besides, if the received message is a result or a claim or cancellation message, the message must be referred to the CPO being currently executed. Besides, using a XNOR and a AND gate it is validated the correctness of the received message using the checksum. As a result, four enable signal are generated: “en_execution,” “en_result,” “en_cancel” and ”en_claim.” The signal associated to the received message type is set to high level.
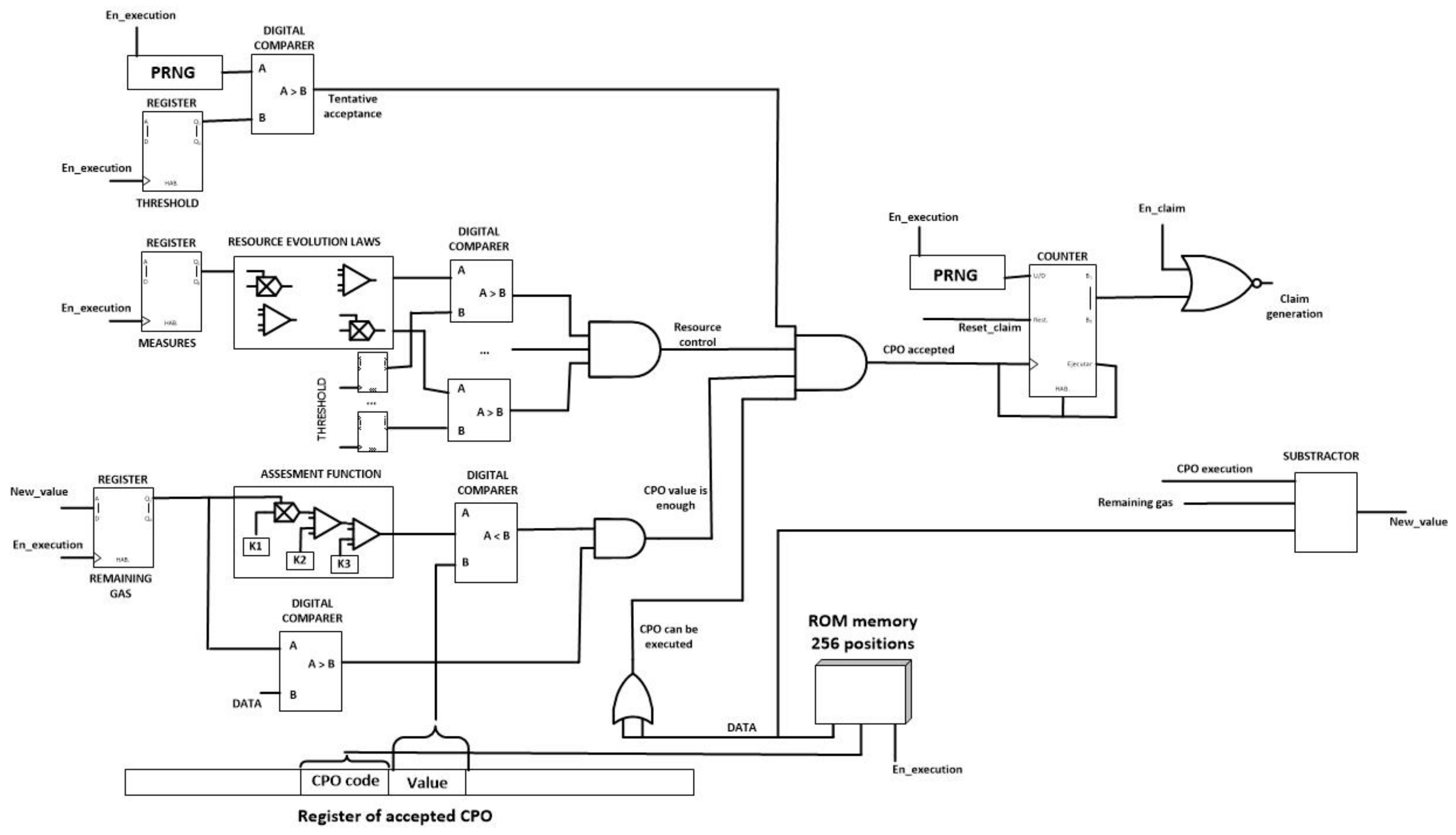
Figure 15 shows the CPO evaluation module. This circuit performs the self-management functions and the first steps in the choreographed execution of tasks. As can be seen, although in
Figure 13 the proposed algorithm was showed in a sequential way, hardware technologies enable the parallel execution of the different verification phases, despite of the fact that smart nodes, usually, do not support parallel programming.
The unique important novelty in the proposed hardware implementation is the inclusion of a 256 position ROM memory. In this memory, only positions whose address corresponds with codes of CPO the node can perform have a non-empty content. The content of this memory is the amount of gas each CPO requires to be executed. In that way, doing only one query to the ROM memory two steps in the proposed algorithm are performed almost completely.
Moreover, in order to implement the entire algorithm using simple hardware technologies, Pseudorandom Number Generators (PRNG) might be constructed using XOR gates and Logical Shift Registers.
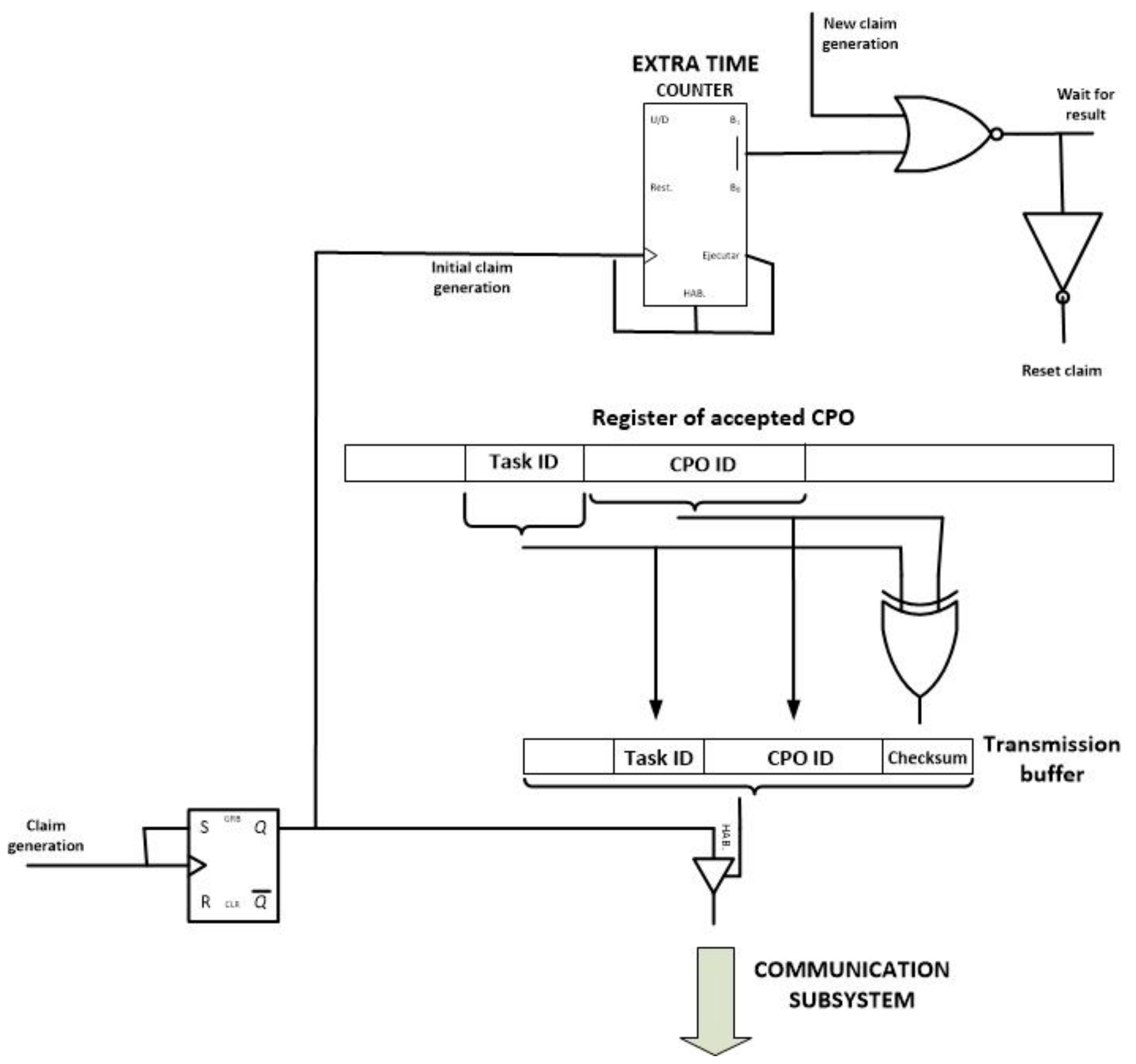
Once the “claim generation” signal is calculated, a second module starts its performance: the claim module (see
Figure 16). This module generates and transmits the claim operation message (if needed) and performs the steps of the choreography algorithm that ensure that only one node in the WSN is responsible for executing a CPO.
The claim module includes a RS bistable which maintains the initial “claim generation signal” in its original value for an infinite time. This new signal (the “initial claim generation” signal) activates a counter which controls the extra waiting time for simultaneous claim messages. At the same time, a tristate buffer is enabled and the corresponding claim message is broadcasted. If during the extra time a new claim message is received, a reset signal is activated, so the last step in the CPO evaluation module is executed once more (a new random waiting time is initiated to solve the collision of claim messages). The inverse of this reset signal activates the last module of the proposed self-managed and choreographed task execution algorithm.
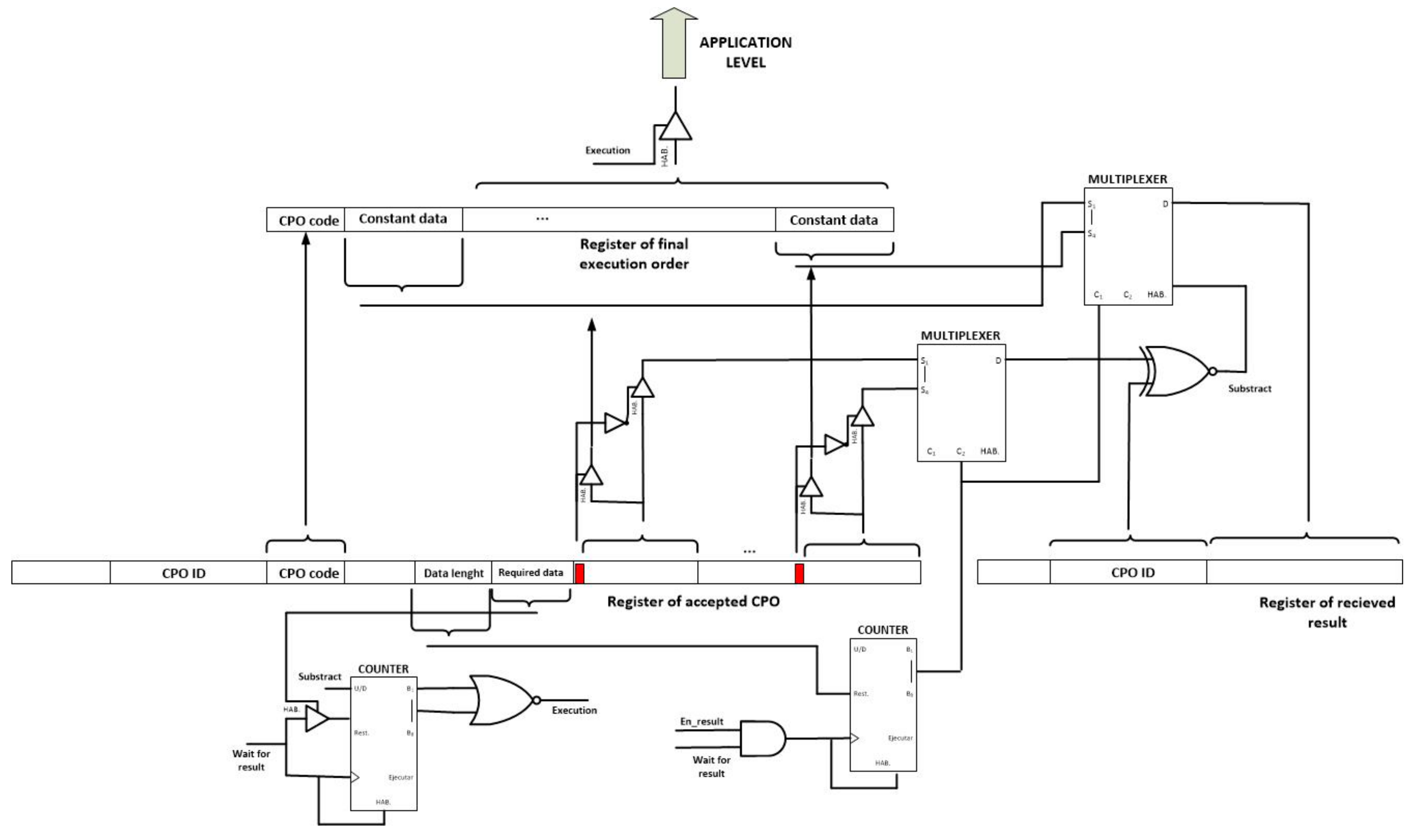
Thus and finally, the CPO execution module maintains accepted CPO in a waiting state, until the minimum number of input data are received and then the execution is finally performed (see
Figure 17). In order to do that, a counter controls the number of constant data that have been received and compares the result with the required data specified in the execution order. Once both values are equal (the counter reaches the value zero), a tristate buffer sends the final CPO execution order to the application level.
Using also tristate buffers and the one bit flag that is included with each data in the CPO execution order, it is decided if the corresponding data is a constant value that can be included directly in the final execution order, or a cross-reference that must be replaced. Each time a result message is received, two multiplexers are employed to compare the CPO ID to the pending cross-references and, if success, replace the adequate reference with the received results.
Once the CPO is executed the result message can be generated and broadcasted using only one buffer. Besides, if the en_cancel signal gets activated at any time, all registers, counters and other digital circuits get reset using the appropriate pin of each element. In these both cases, no additional hardware implementation is required.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}