Design and Deployment of Low-Cost Sensors for Monitoring the Water Quality and Fish Behavior in Aquaculture Tanks during the Feeding Process





Abstract
1. Introduction
2. Related Work
3. Materials and Methods
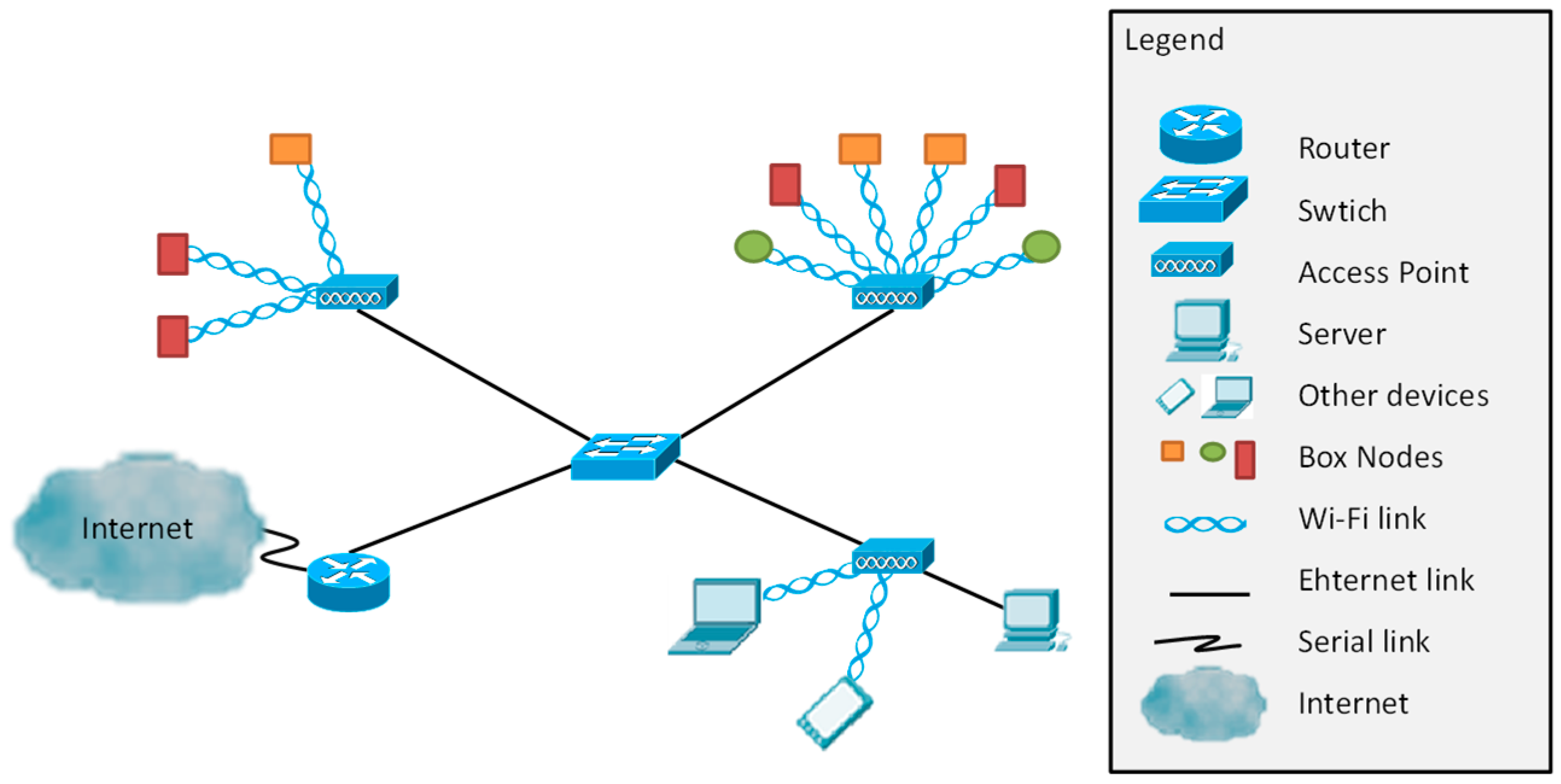
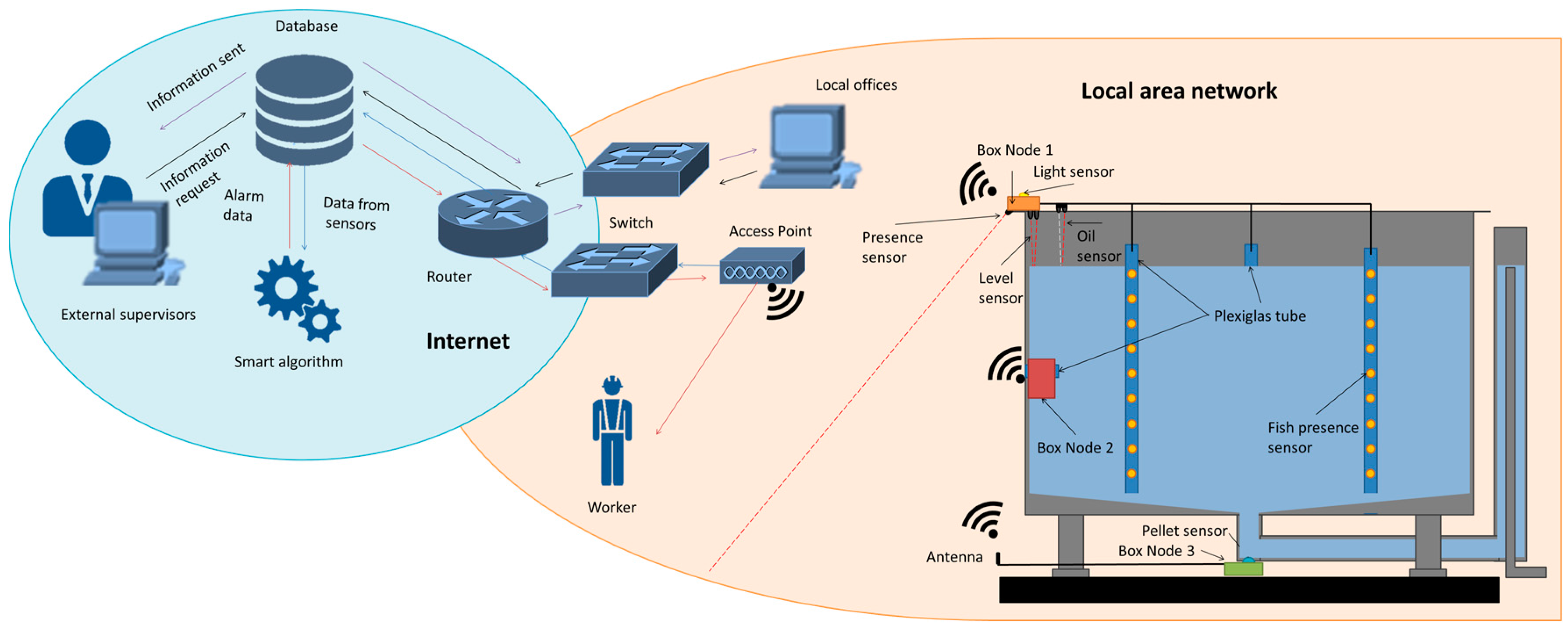
3.1. Architecture
3.2. Sensors
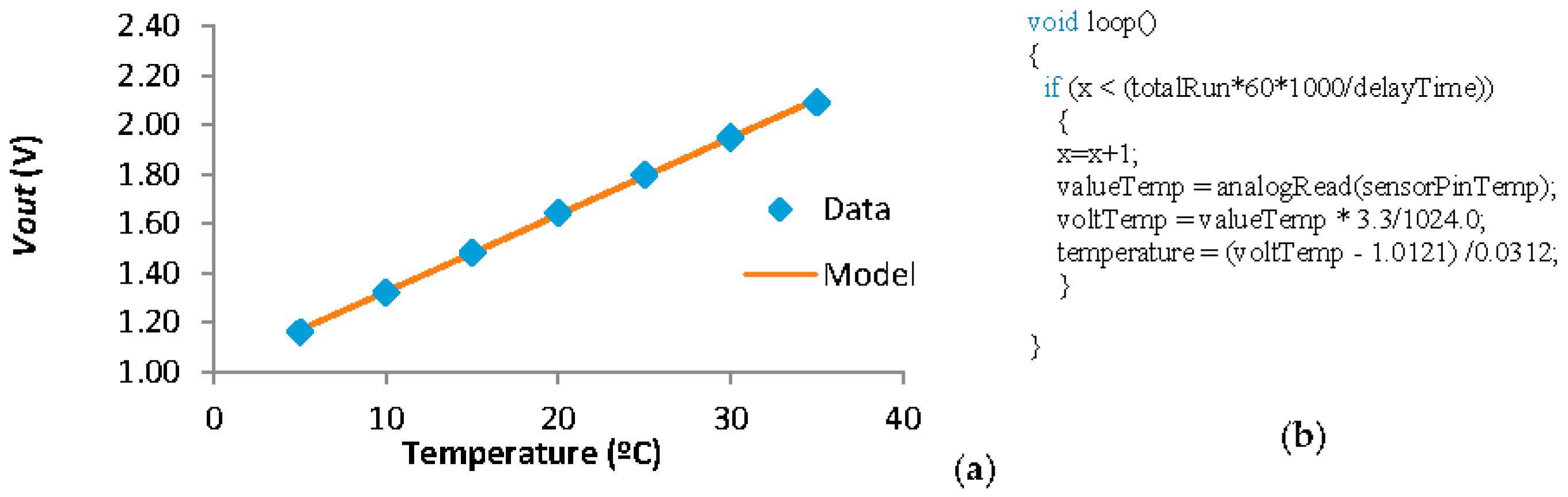
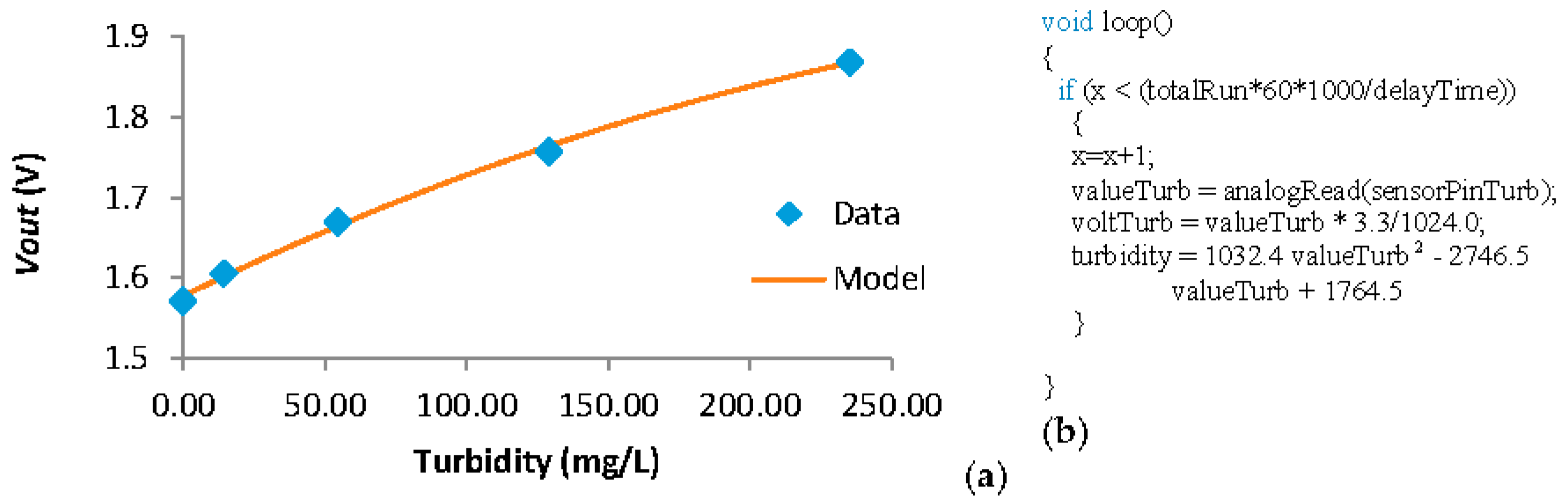
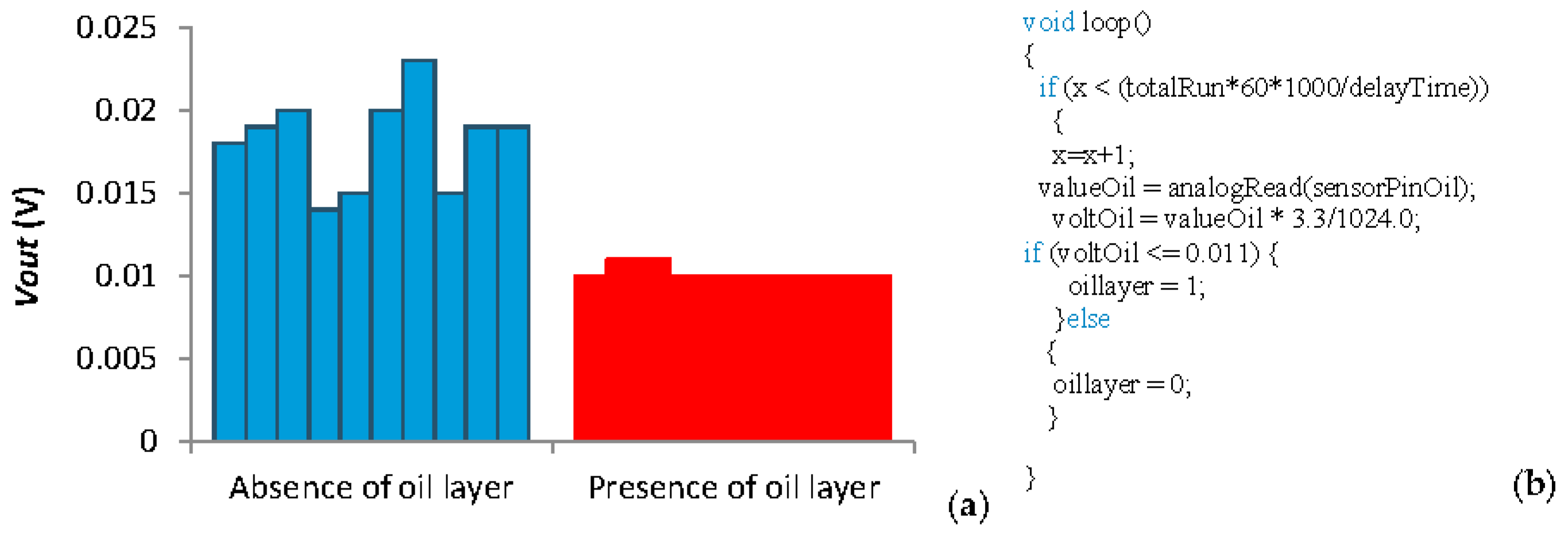
3.2.1. Water Parameters
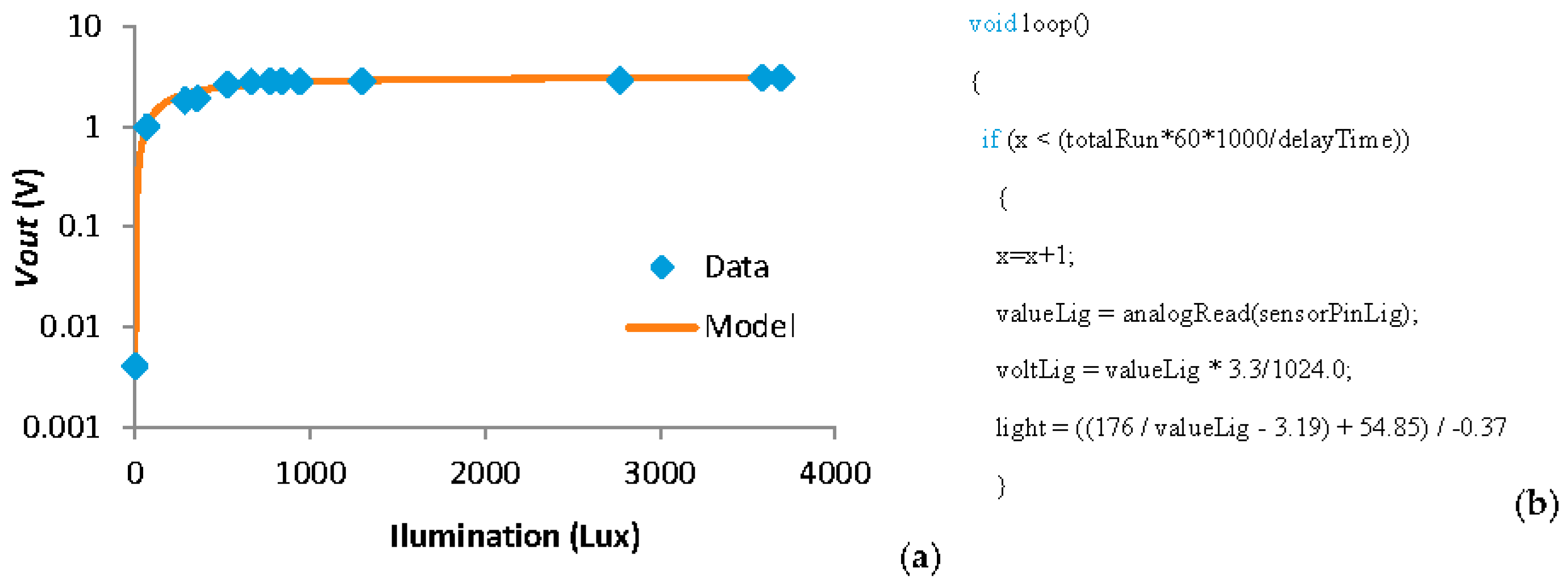
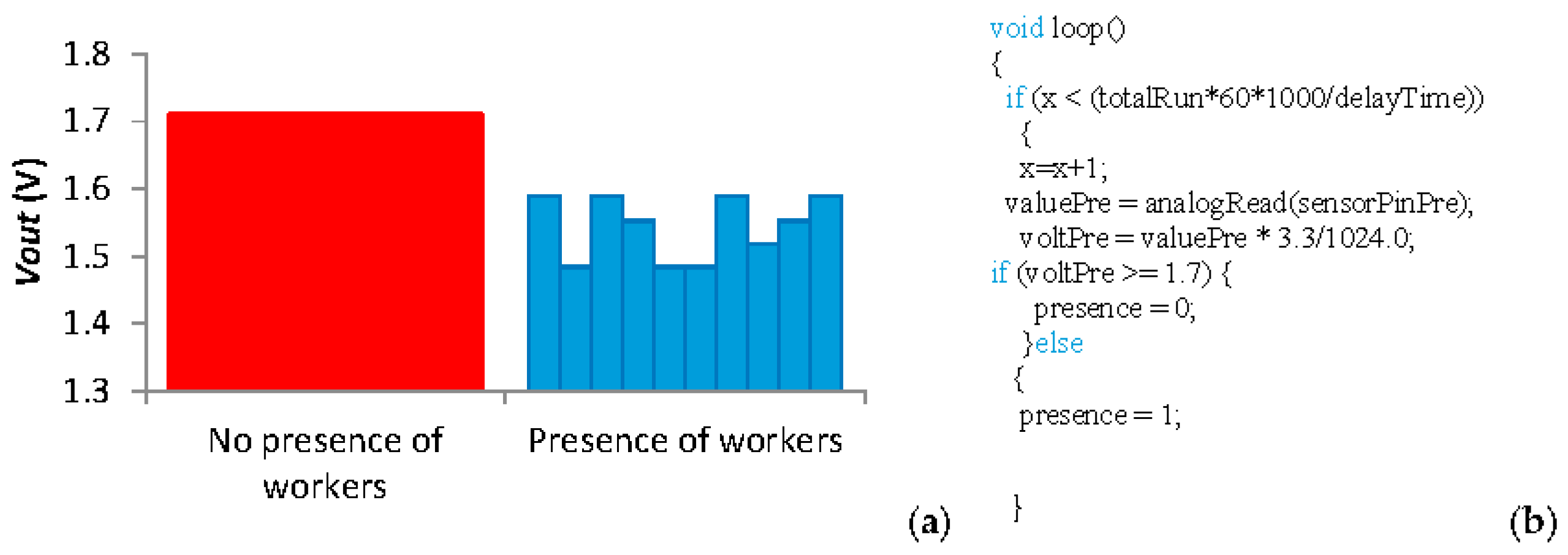
3.2.2. Tank Parameters
3.2.3. Feeding Parameters
3.2.4. Other Sensors
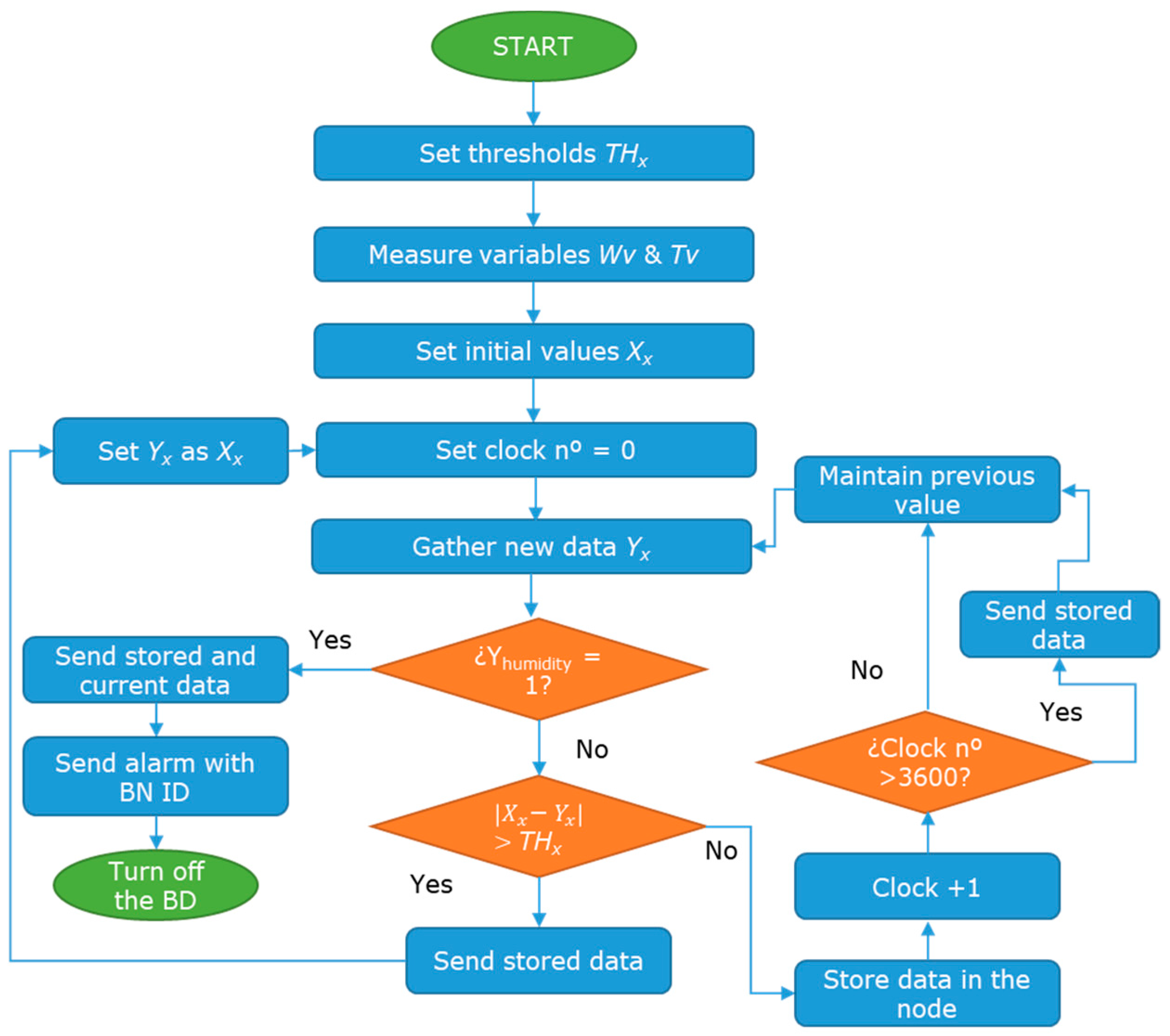
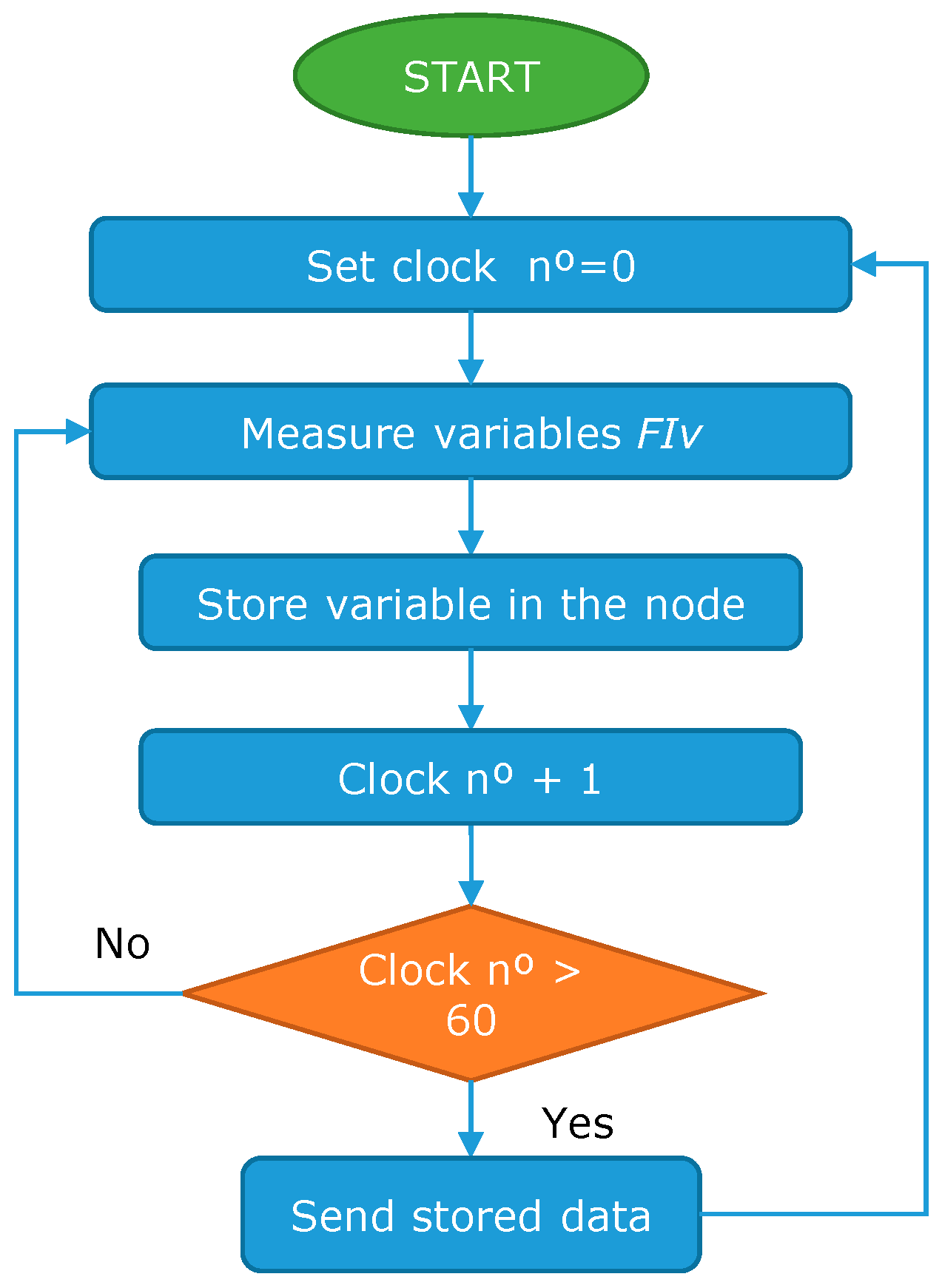
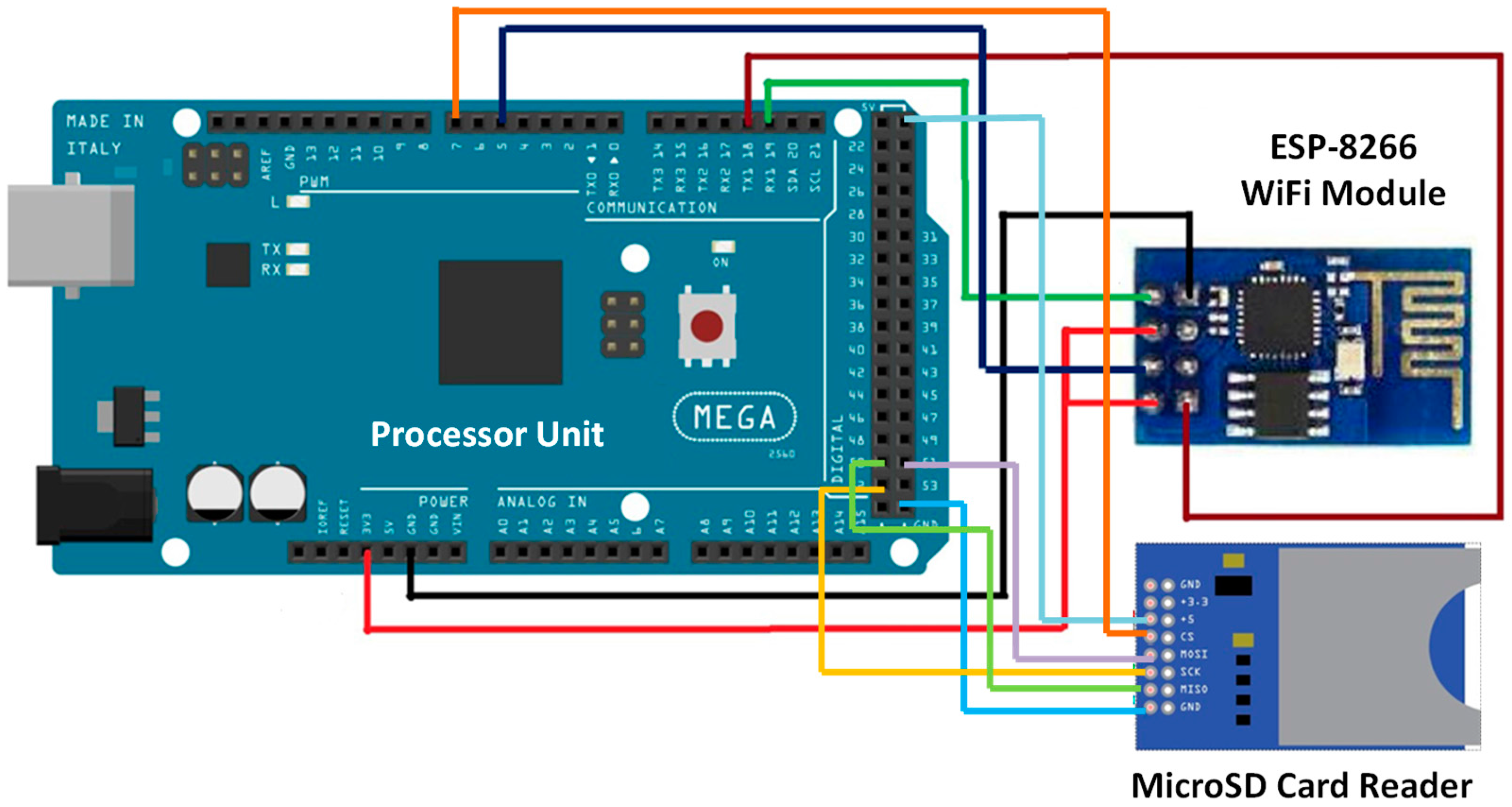
3.3. Node
4. Results and Discursion
4.1. Results of the Water Quality Sensors
4.2. Results of the Tank Sensors
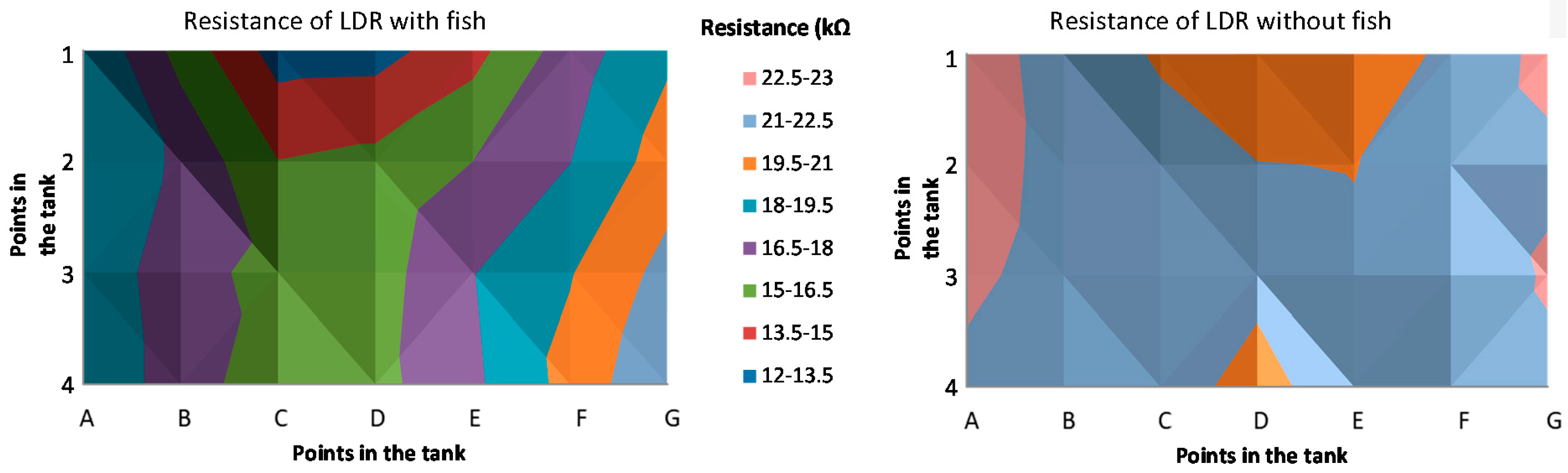
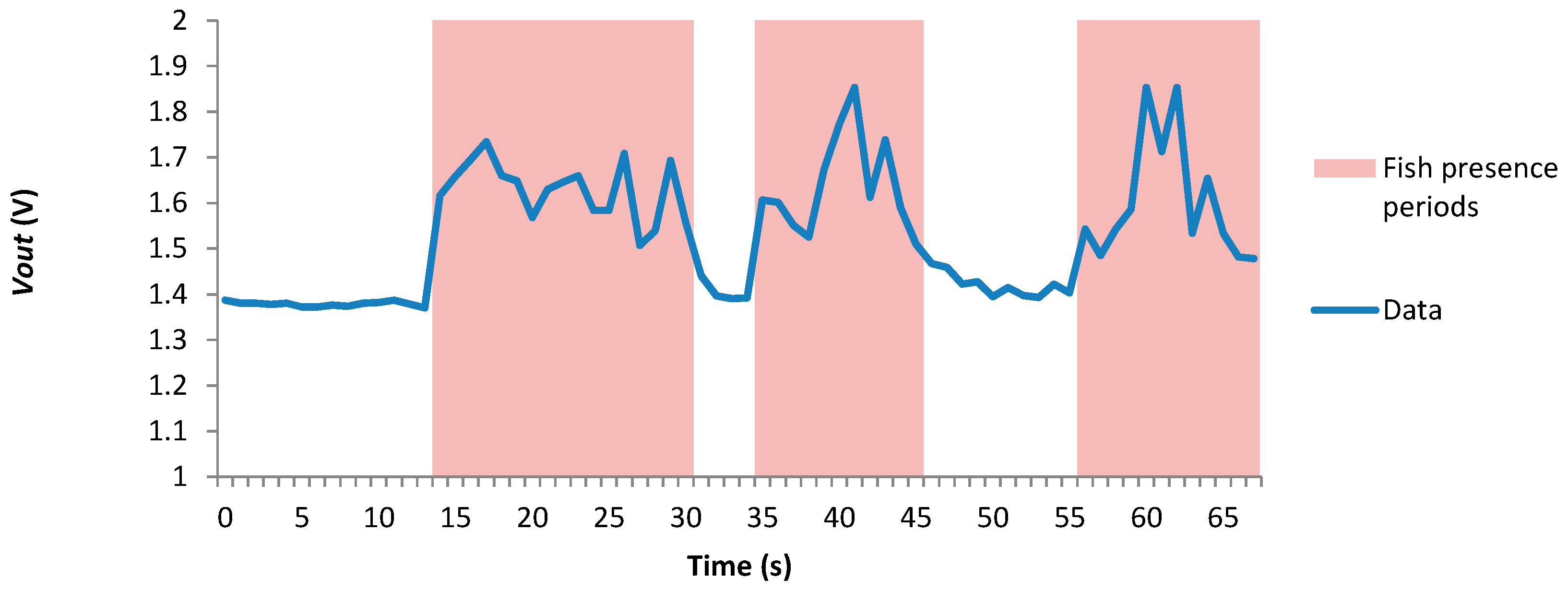
4.3. Results of the Fish Behaviour Sensors




4.4. Comparison with Other Systems and Price of the Employed Components
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Merino, G.; Barange, G.; Blanchard, J.L.; Harle, J.; Holmes, R.; Allen, I.; Allison, E.H.; Badjeck, M.C.; Dulvy, N.K.; Holt, J.; et al. Can marine fisheries and aquaculture meet fish demand from a growing human population in a changing climate? Glob. Environ. Chang. 2012, 22, 795–806. [Google Scholar] [CrossRef]
- Rubio, V.C.; Sánchez-Vázquez, F.J.; Madrid, J.A. Effects of salinity on food intake and macronutrient selection in European sea bass. Physiol. Behav. 2005, 85, 333–339. [Google Scholar] [CrossRef]
- Adewolu, M.A.; Adeniji, C.A.; Adejobi, A.B. Feed utilization, growth and survival of Clarias gariepinus (Burchell 1822) fingerlings cultured under different photoperiods. Aquaculture 2008, 283, 64–67. [Google Scholar] [CrossRef]
- Kestemont, P.; Jourdan, S.; Houbart, M.; Mélard, C.; Paspatis, M.; Fontaine, P.; Cuvier, A.; Kentouri, M.; Barasc, E. Size heterogeneity, cannibalism and competition in cultured predatory fish larvae: Biotic and abiotic influences. Aquaculture 2003, 227, 333–356. [Google Scholar] [CrossRef]
- Biswas, A.K.; Seoka, M.; Ueno, K.; Yong, A.S.K.; Biswas, B.K.; Kim, Y.; Takii, K.; Kumai, H. Growth performance and physiological responses in striped knifejaw, Oplegnathus fasciatus, held under different photoperiods. Aquaculture 2008, 279, 42–46. [Google Scholar] [CrossRef]
- Ardjosoediro, I.; Ramnarine, I.W. The influence of turbidity on growth, feed conversion and survivorship of the Jamaica red tilapia strain. Aquaculture 2002, 212, 159–165. [Google Scholar] [CrossRef]
- Kameoka, S.; Isoda, S.; Hashimoto, A.; Ito, R.; Miyamoto, S.; Wada, G.; Watanabe, N.; Yamakami, T.; Suzuki, K.; Kameoka, T. A Wireless Sensor Network for Growth Environment Measurement and Multi-Band Optical Sensing to Diagnose Tree Vigor. Sensors 2017, 17, 966. [Google Scholar] [CrossRef]
- Wang, J.; Niu, X.; Zheng, L.; Zheng, C.; Wang, Y. Wireless Mid-Infrared Spectroscopy Sensor Network for Automatic Carbon Dioxide Fertilization in a Greenhouse Environment. Sensors 2016, 16, 1941. [Google Scholar] [CrossRef]
- Sawant, S.; Durbha, S.S.; Jagarlapudi, A. Interoperable agro-meteorological observation and analysis platform for precision agriculture: A case study in citrus crop water requirement estimation. Comput. Electron. Agric. 2007, 138, 175–187. [Google Scholar] [CrossRef]
- Nadimi, E.S.; Blanes-Vidal, V.; Jørgensen, R.N.; Christensen, S. Energy generation for an ad hoc wireless sensor network-based monitoring system using animal head movement. Comput. Electron. Agric. 2011, 75, 238–242. [Google Scholar] [CrossRef]
- Handcock, R.N.; Swain, D.L.; Bishop-Hurley, G.J.; Patison, K.P.; Wark, T.; Valencia, P.; Corke, P.; O’Neill, C.J. Monitoring animal behaviour and environmental interactions using wireless sensor networks, GPS collars and satellite remote sensing. Sensors 2009, 9, 3586–3603. [Google Scholar] [CrossRef]
- Espinosa-Faller, F.J.; Redón-Rpdríguez, G.E. A ZigBee Wireless Sensor Network for Monitoring an Aquaculture Recirculating System. J. Appl. Res. Technol. 2012, 10, 380–387. [Google Scholar]
- Zhang, M.; Li, D.; Wang, L.; Ma, D.; Ding, Q. Design and Development of Water Quality Monitoring System Based on Wireless Sensor Network in Aquaculture. In Proceedings of the International Conference on Computer and Computing Technologies in Agriculture, Nanchang, China, 22–25 October 2010; pp. 629–641. [Google Scholar]
- Qi, L.; Zhang, J.; Xu, M.; Fu, Z.; Chen, W.; Zhang, X. Developing WSN-based traceability system for recirculation aquaculture. Math. Comput. Model. 2011, 53, 2162–2172. [Google Scholar]
- Huang, J.; Wang, W.; Jiang, S.; Sun, D.; Ou, G.; Lu, K. Development and test of aquacultural water quality monitoring system based on wireless sensor network. Trans. Chin. Soc. Agric. Eng. 2013, 29, 183–190. [Google Scholar]
- Simbeye, D.S.; Yang, S.F. Water Quality Monitoring and Control for Aquaculture Based on Wireless Sensor Networks. J. Netw. 2014, 9, 840–849. [Google Scholar] [CrossRef]
- Zhu, X.; Li, D.; He, D.; Wang, J.; Wang, J.; Ma, D.; Li, F. A remote wireless system for water quality online monitoring in intensive fish culture. Comput. Electron. Agric. 2010, 71, S3–S9. [Google Scholar] [CrossRef]
- Encinas, C.; Ruiz, E.; Cortez, J.; Espinoza, A. Design and implementation of a distributed IoT system for the monitoring of water quality in aquaculture. In Proceedings of the Wireless Telecommunications Symposium, Chicago, IL, USA, 26–28 April 2017; pp. 1–7. [Google Scholar]
- Han, S.; Kang, Y.; Park, K.; Jang, M. Design of Environment Monitoring System for Aquaculture Farms. In Proceedings of the Frontiers in the Convergence of Bioscience and Information Technologies, Jeju City, Korea, 11–13 October 2007; pp. 889–893. [Google Scholar]
- Cario, G.; Casavola, A.; Lupia, P.G.M.; Petrioli, C.; Spaccini, D. Long lasting underwater wireless sensors network for water quality monitoring in fish farms. In Proceedings of the 60th MTS/IEEE OCEANS Conference, Aberdeen, Scotland, UK, 19–22 June 2017; pp. 1–6. [Google Scholar]
- Hongpin, L.; Guanglin, L.; Weifeng, P.; Jie, S.; Qiuwei, B. Real-time remote monitoring system for aquaculture water quality. Int. J. Agric. Biol. Eng. 2015, 8, 136–143. [Google Scholar]
- Yang, S.; Jing, K.; Zhao, J. Wireless Monitoring System for Aquiculture Environment. In Proceedings of the IEEE International Workshop on Radio-Frequency Integration Technology, Singapore, 9–11 December 2007; pp. 274–277. [Google Scholar]
- Papadakis, V.M.; Papadakis, J.E.; Lamprianidou, F.; Glaropoulos, A.; Kentouri, M. A computer-vision system and methodology for the analysis of fish behavior. Aquac. Eng. 2012, 46, 53–90. [Google Scholar] [CrossRef]
- Saberioon, M.; Gholizadeh, A.; Cisar, P.; Pautsina, A.; Urban, J. Application of machine vision systems in aquaculture with emphasis on fish: State-of-the-art and key issues. Rev. Aquac. 2017, 9, 369–387. [Google Scholar] [CrossRef]
- Armstrong, J.D.; Braithwaite, V.A.; Rycroft, P. A flat-bed passive integrated transponder antenna array for monitoring behaviour of Atlantic salmon parr and other fish. J. Fish Biol. 1996, 48, 539–541. [Google Scholar] [CrossRef]
- Conti, S.G.; Roux, P.; Fauvel, C.; Maurer, B.D.; Demer, D.A. Acoustical monitoring of fish density, behavior, and growth rate in a tank. Aquaculture 2006, 251, 314–323. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, Q.; Kang, M. Measurement of swimming pattern and body length of cultured Chinese sturgeon by use of imaging sonar. Aquaculture 2014, 434, 184–187. [Google Scholar] [CrossRef]
- Ruff, B.P.; Marchant, J.A.; Frost, A.R. Fish Sizing and Monitoring Using a Stereo Image Analysis System Applied to Fish Farming. Aquac. Eng. 1995, 14, 155–173. [Google Scholar] [CrossRef]
- Sims, D.W.; Queiroz, N.; Humphrie, N.E.; Lima, F.P.; Hays, G.C. Long-Term GPS Tracking of Ocean Sunfish Mola mola Offers a New Direction in Fish Monitoring. PLoS ONE 2009, 4, 1–6. [Google Scholar] [CrossRef]
- Karimanzira, D.; Jacobi, M.; Pfuetzenreuter, T.; Rauschenbach, T.; Eichhorn, M.; Taubert, R.; Ament, C. First testing of an AV mission planning and guidance system for water quality monitoring and fish behavior observation in net cage fish farming. Inf. Process. Agric. 2014, 1, 131–140. [Google Scholar]
- Amazon Web Services Platform. In Amazon Web Services Web Page. Available online: https://aws.amazon.com/?nc1=h_ls (accessed on 23 February 2018).
- Microsoft Azure Platform. In Microsoft Azure Web Page. Available online: https://azure.microsoft.com/en-us/?v=18.05 (accessed on 23 February 2018).
- Azizi, R. Consumption of Energy and Routing Protocols in Wireless Sensor Network. Netw. Protoc. Algorithms 2016, 8, 76–87. [Google Scholar] [CrossRef]
- Shahzad, M.K.; Cho, T.H. A Network Density-adaptive Improved CCEF Scheme for Enhanced Network Lifetime, Energy Efficiency, and Filtering in WSNs. Adhoc Sens. Wirel. Netw. 2017, 35, 129–149. [Google Scholar]
- Wang, L.; Yang, Y.; Zhao, W.; Xu, L.; Lan, S. Multi-rate Network Coding for Energy-Efficient Multicast in Heterogeneous Wireless Multi-hop Networks. Adhoc Sens. Wirel. Netw. 2016, 32, 197–219. [Google Scholar]
- NRC Thermistor Datasheet. Available online: https://www.vishay.com/docs/29078/ntcle413.pdf (accessed on 12 January 2018).
- Parra, L.; Karampelas, E.; Sendra, S.; Lloret, J.; Rodrigues, J.J. Design and deployment of a smart system for data gathering in estuaries using wireless sensor networks. In Proceedings of the 2015 International Conference on Computer, Information and Telecommunication Systems, Gijon, Spain, 15–17 July 2015; pp. 1–5. [Google Scholar]
- Parra, L.; Sendra, S.; Lloret, J.; Rodrigues, J.J. Design and deployment of a smart system for data gathering in aquaculture tanks using wireless sensor networks. Int. J. Commun. Syst. 2017, 30, 1099–1131. [Google Scholar] [CrossRef]
- Antonov, J.I.; Seidov, D.; Boyer, T.P.; Locarnini, R.A.; Mishonov, A.V.; Garcia, H.E.; Baranova, O.K.; Zweng, M.M.; Johnson, D.R. World Ocean Atlas Volume 2; Levitus, S.S., Ed.; NOAA Atlas NESDIS 69; U.S. Gov. Printing Office: Washington, DC, USA, 2009; p. 184.
- IR LED Datasheet. Available online: https://www.vishay.com/docs/81078/tshg6200.pdf (accessed on 12 January 2018).
- IR Photodetector Datasheet. Available online: https://www.vishay.com/docs/81530/bpw83.pdf (accessed on 12 January 2018).
- Parra, L.; Sendra, S.; Lloret, J.; Mendoza, J. Low cost optic sensor for hydrocarbon detection in open oceans. Instrum. Viewp. 2015, 45, 87–90. [Google Scholar]
- White LED VLHW4100. Available online: http://www.farnell.com/datasheets/2049319.pdf (accessed on 13 January 2018).
- IR Photodiode BPW41N. Available online: http://www.farnell.com/datasheets/2046124.pdf (accessed on 13 January 2018).
- Level Sensor GP2Y0A02YK0F. Available online: http://www.farnell.com/datasheets/1386113.pdf (accessed on 13 January 2018).
- LDR NORPS-12. Available online: http://www.farnell.com/datasheets/409710.pdf (accessed on 13 January 2018).
- LDR NSL 19M51. Available online: http://www.farnell.com/datasheets/77395.pdf (accessed on 13 January 2018).
- Marín, J.; Rocher, J.; Parra, L.; Sendra, S.; Lloret, J.; Mauri, P.V. Autonomous WSN for Lawns Monitoring in Smart Cities. In Proceedings of the 5th International workshop on Big Data and Social Networking Management and Security (BDSN 2017), Hammamet, Tunisia, 30 October 2017–3 November 2017. [Google Scholar]
- Rocher, J.; Parra, L.; Taha, M.; Lloret, J. Diseño de una red de sensores para monitorizar una instalación acuícola. In Proceedings of the XIII Jornadas de Ingeniería Telemática JITEL 2017, Valencia, Spain, 27–29 September 2017; pp. 48–54. [Google Scholar]
- ESP8266 WiFi Module Features. In Electro Schematic Website. Available online: http://www.electroschematics.com/wp-content/uploads/2015/02/esp8266-datasheet.pdf (accessed on 13 January 2018).
- CD74HC4067 16-Channel Analog Multiplexer/Demultiplexer features. In Texas Instrument website. Available online: http://www.ti.com/lit/ds/symlink/cd74hc4067.pdf (accessed on 13 January 2018).
- 74LVC1G3157 Single-Pole Double-Throw Analog Switch. Available online: https://assets.nexperia.com/documents/data-sheet/74LVC1G3157.pdf (accessed on 13 January 2018).
- Khaleeq, H.; Abou-Elnour, A.; Tarique, M. A Reliable Wireless System for Water Quality Monitoring and Level Control. Netw. Protoc. Algorithms 2016, 8, 1–14. [Google Scholar] [CrossRef]
- Chen, Y.; Zhen, Z.; Yu, H.; Xu, J. Application of Fault Tree Analysis and Fuzzy Neural Networks to Fault Diagnosis in the Internet of Things (IoT) for Aquaculture. Sensors 2017, 17, 153. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | [12] | [13] | [14] | [15] | [16] | [17] | [18] | [19] | [20] | [21] | Our Proposal |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Communication technology: | ZigBee | ZigBee | ZigBee | N.I. | ZigBee | ZigBee | LR-WPAN | N.I. | ZigBee | N.I. | WiFi |
| Applied on: | Tanks | Tank | Tanks | Ponds | Ponds | Tanks | Ponds | N.I. | Tank | Ponds | Tanks |
| Considers the location of the sensor? | x | x | |||||||||
| Develop their own sensors? | x | ||||||||||
| Store information? | x | x | x | x | x | x | x | x | x | x | x |
| Send alarm? | x | x | x | x | x | x | x | x | |||
| pH | x | x | x | x | x | x | x | x | |||
| Water level | x | x | x | ||||||||
| Temperature | x | x | x | x | x | x | x | x | x | x | x |
| Pressure | x | ||||||||||
| Dissolved oxygen | x | x | x | x | x | x | x | x | x | ||
| Conductivity | x | x | x | x | |||||||
| Ammonia | x | ||||||||||
| Others | x | ||||||||||
| Fish monitoring | x | ||||||||||
| Total of monitored parameters | 3 | 4 | 3 | 3 | 4 | 4 | 3 | 3 | 4 | 2 | 10 |
| Purpose | Item | Unitary Cost (€) | Units | Cost (€) | ||
|---|---|---|---|---|---|---|
| Sensors | Water quality | Temperature | NTCLE413E2103F520L | 0.62 | 1 | 0.62 |
| Conductivity | - | 0.48 | 1 | 0.48 | ||
| Turbidity | TSHG6200 IR LED | 0.75 | 1 | 0.75 | ||
| BPW83 IR photodetector | 0.38 | 1 | 0.38 | |||
| Oli layer | VLHW4100 White LED | 0.36 | 1 | 0.36 | ||
| BPW41N IR photodetector | 0.52 | 1 | 0.52 | |||
| Tank | Water level | GP2Y0A02YK0F level sensor | 15.23 | 1 | 15.23 | |
| Workers presence | TSHG6200 IR LED | 0.76 | 1 | 0.76 | ||
| BPW83 IR photodetector | 0.38 | 1 | 0.38 | |||
| Light | NORPS-12 LDR | 1.76 | 1 | 1.76 | ||
| Others | Fish presence | NSL 19M51 LDR | 0.55 | 30 | 16.5 | |
| Feed falling | Jtron OV7670 300KP VGA | 5.35 | 1 | 5.35 | ||
| Humidity | HCZ-D5-A Humidity sensor | 1.45 | 3 | 4.35 | ||
| Node | Node | Node compatible with Arduino | 6.7 | 3 | 20.1 | |
| Memory system | Micro SD Card reader | 2.19 | 3 | 6.57 | ||
| Micro SD Card 4 Gb | 0.82 | 3 | 2.46 | |||
| Transmission system | ESP8266 WiFi module | 1.58 | 3 | 4.74 | ||
| Multiplexors | CD74HC4067 16-Channel MUX | 0.45 | 2 | 0.90 | ||
| 74LVC1G3157 Single-Pole Double-Throw Analog Switch | 0.45 | 1 | 0.45 | |||
| Other | Resistances | 0.5 | 10 | 5 | ||
| Total | 87.66 | |||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parra, L.; Sendra, S.; García, L.; Lloret, J. Design and Deployment of Low-Cost Sensors for Monitoring the Water Quality and Fish Behavior in Aquaculture Tanks during the Feeding Process. Sensors 2018, 18, 750. https://doi.org/10.3390/s18030750
Parra L, Sendra S, García L, Lloret J. Design and Deployment of Low-Cost Sensors for Monitoring the Water Quality and Fish Behavior in Aquaculture Tanks during the Feeding Process. Sensors. 2018; 18(3):750. https://doi.org/10.3390/s18030750
Chicago/Turabian StyleParra, Lorena, Sandra Sendra, Laura García, and Jaime Lloret. 2018. "Design and Deployment of Low-Cost Sensors for Monitoring the Water Quality and Fish Behavior in Aquaculture Tanks during the Feeding Process" Sensors 18, no. 3: 750. https://doi.org/10.3390/s18030750
APA StyleParra, L., Sendra, S., García, L., & Lloret, J. (2018). Design and Deployment of Low-Cost Sensors for Monitoring the Water Quality and Fish Behavior in Aquaculture Tanks during the Feeding Process. Sensors, 18(3), 750. https://doi.org/10.3390/s18030750