Experimental L-Band Airborne SAR for Oil Spill Response at Sea and in Coastal Waters

Abstract
:1. Introduction
2. Instrument and Methods: Airborne SAR for Oil Spill Response and Recovery
2.1. Design and Response Capabilities of Airborne SAR
2.2. UAVSAR: A Testbed for Oil Spill Response
3. Examples of Airborne SAR Spill Response Capabilities
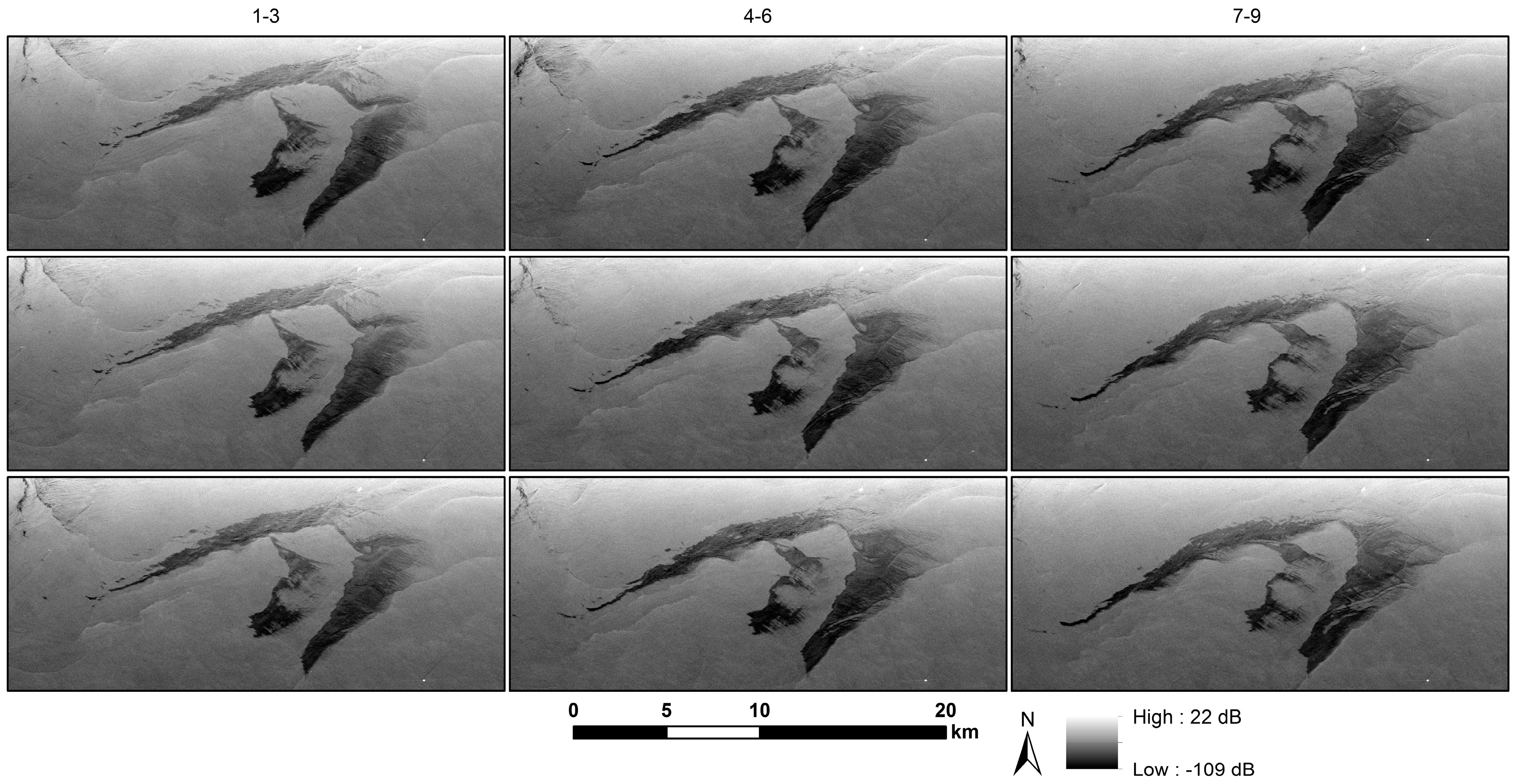
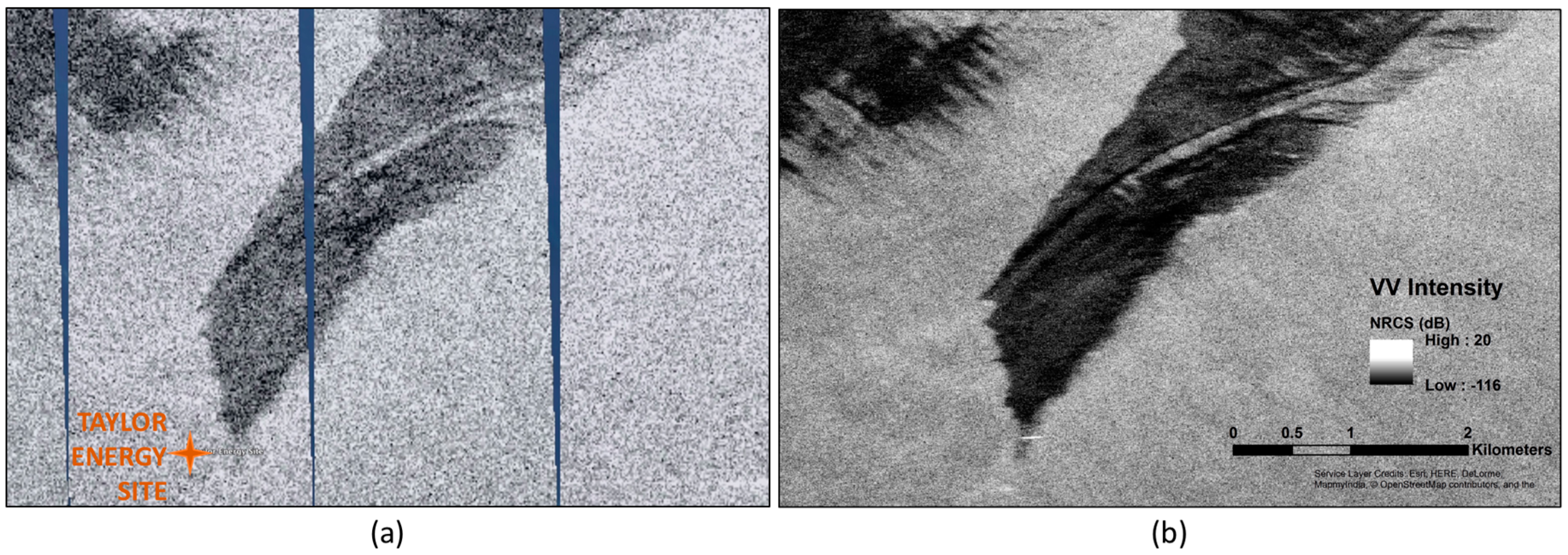
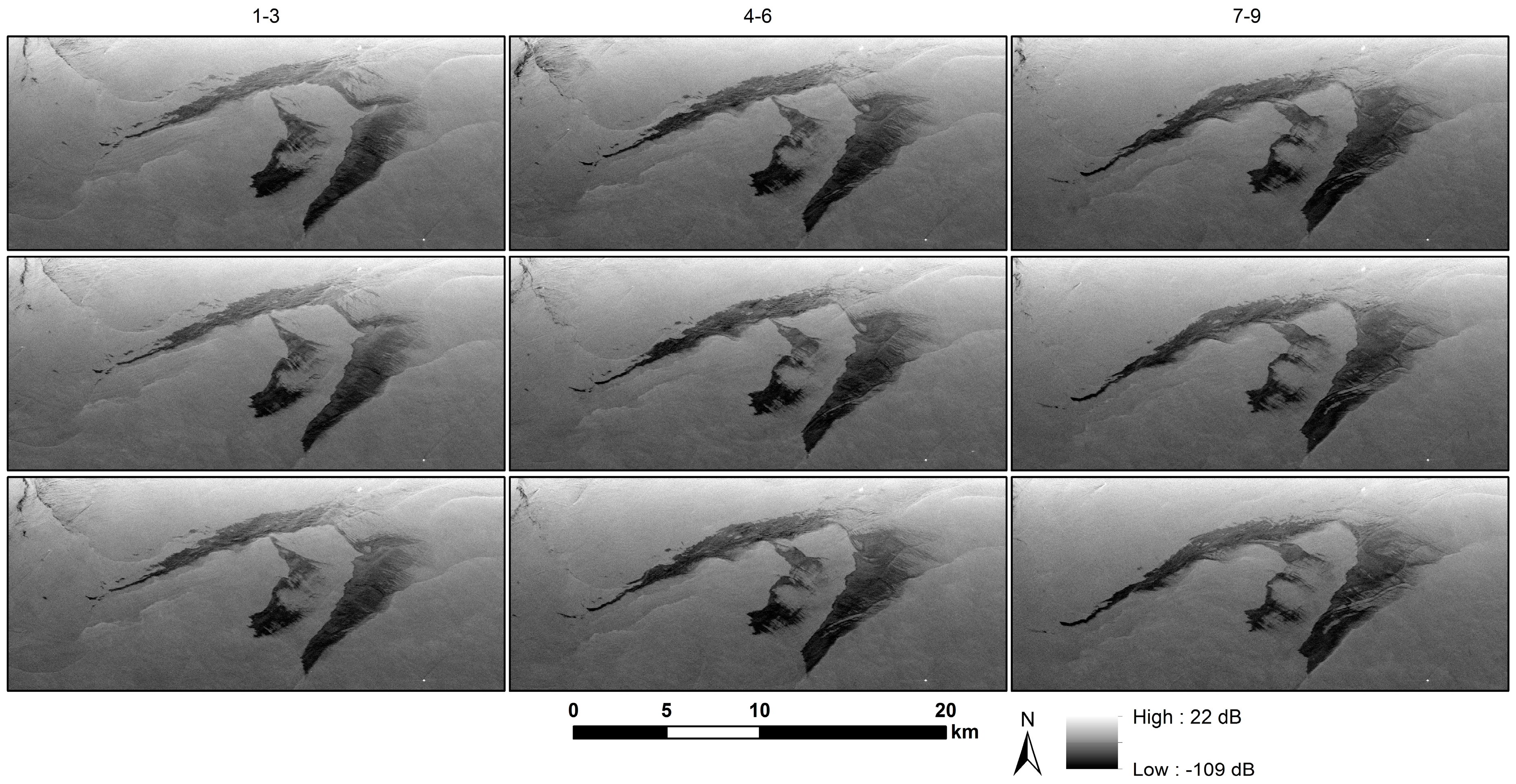
3.1. Oil Slick Tracking
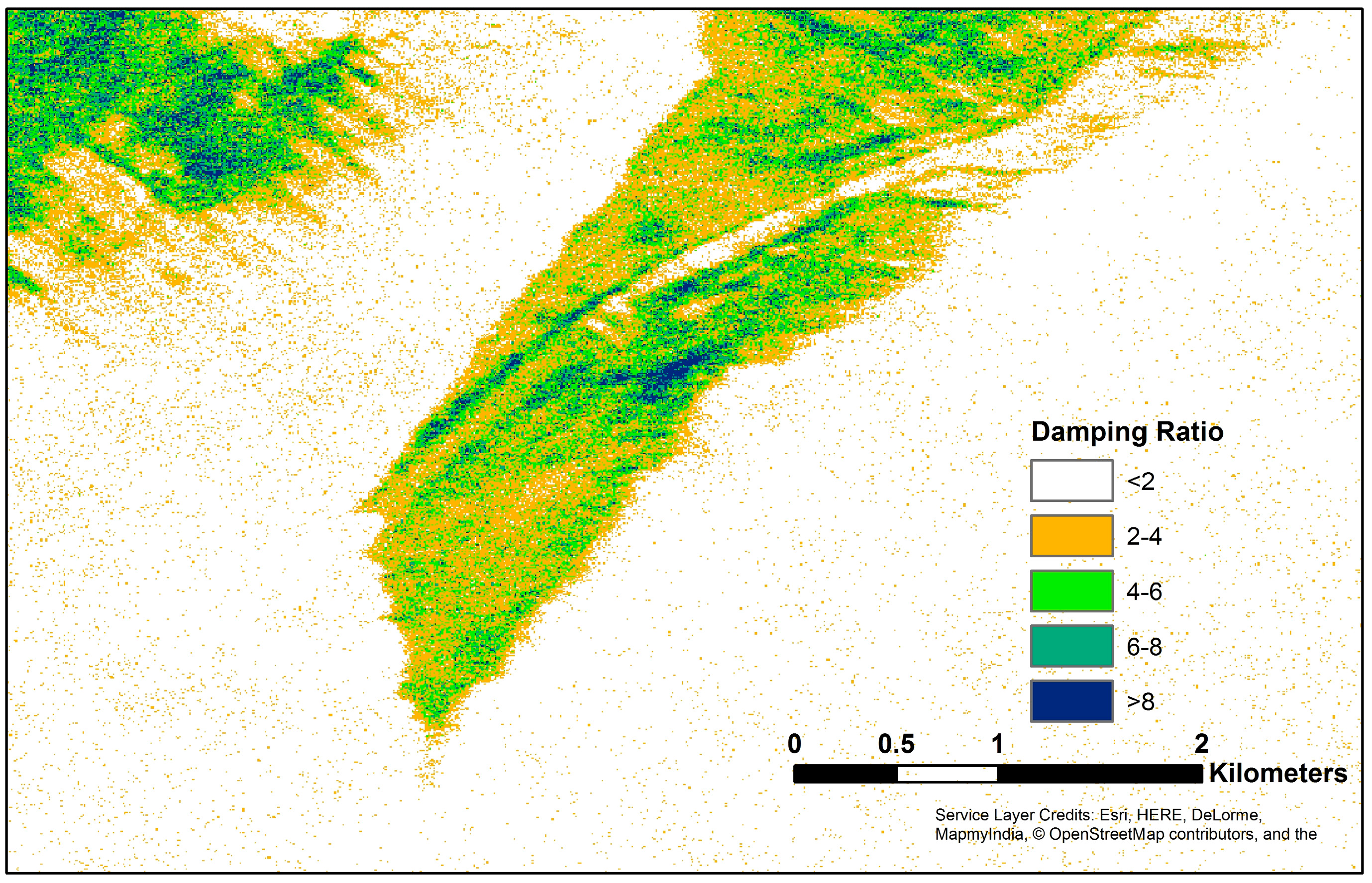
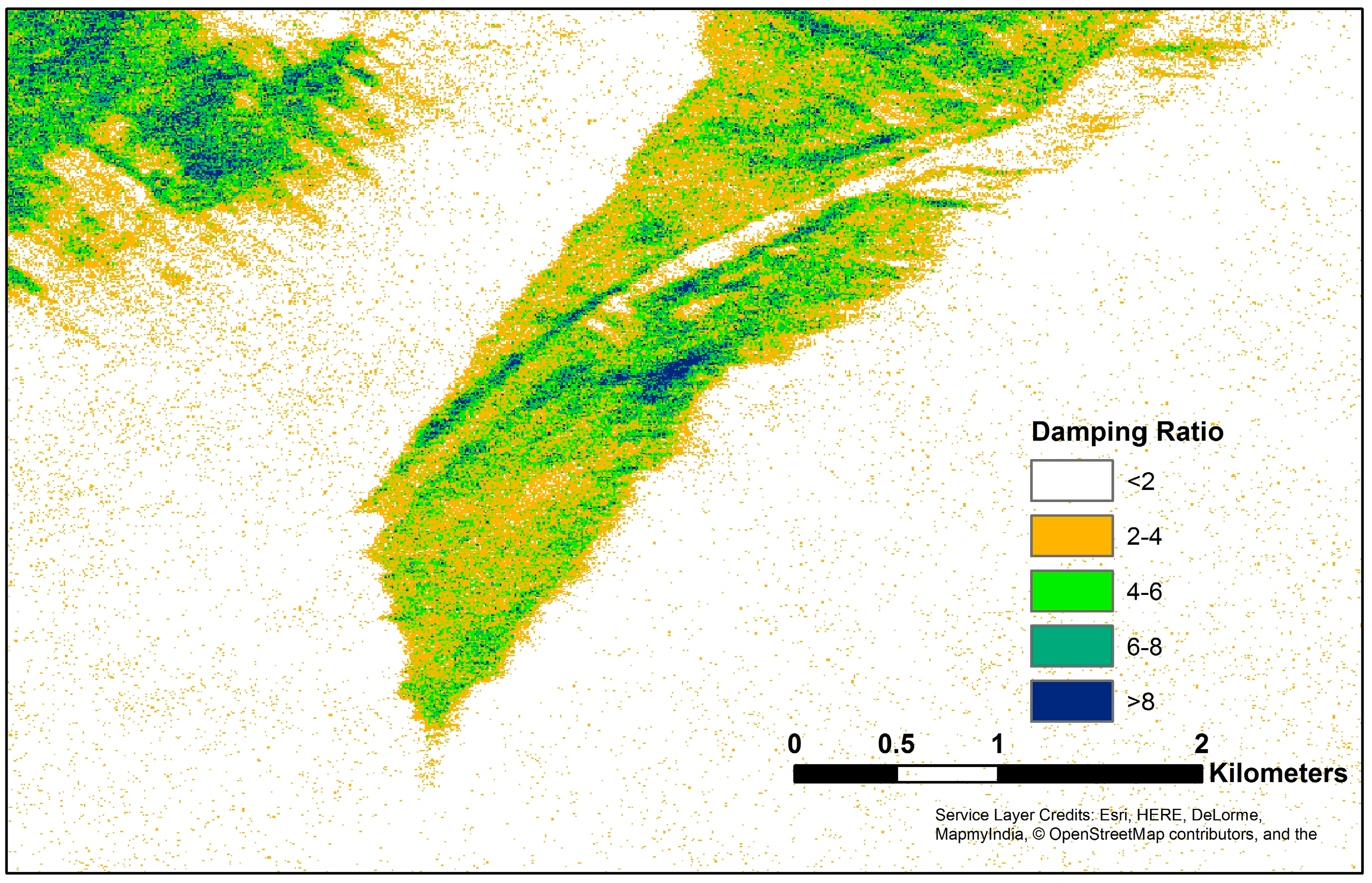
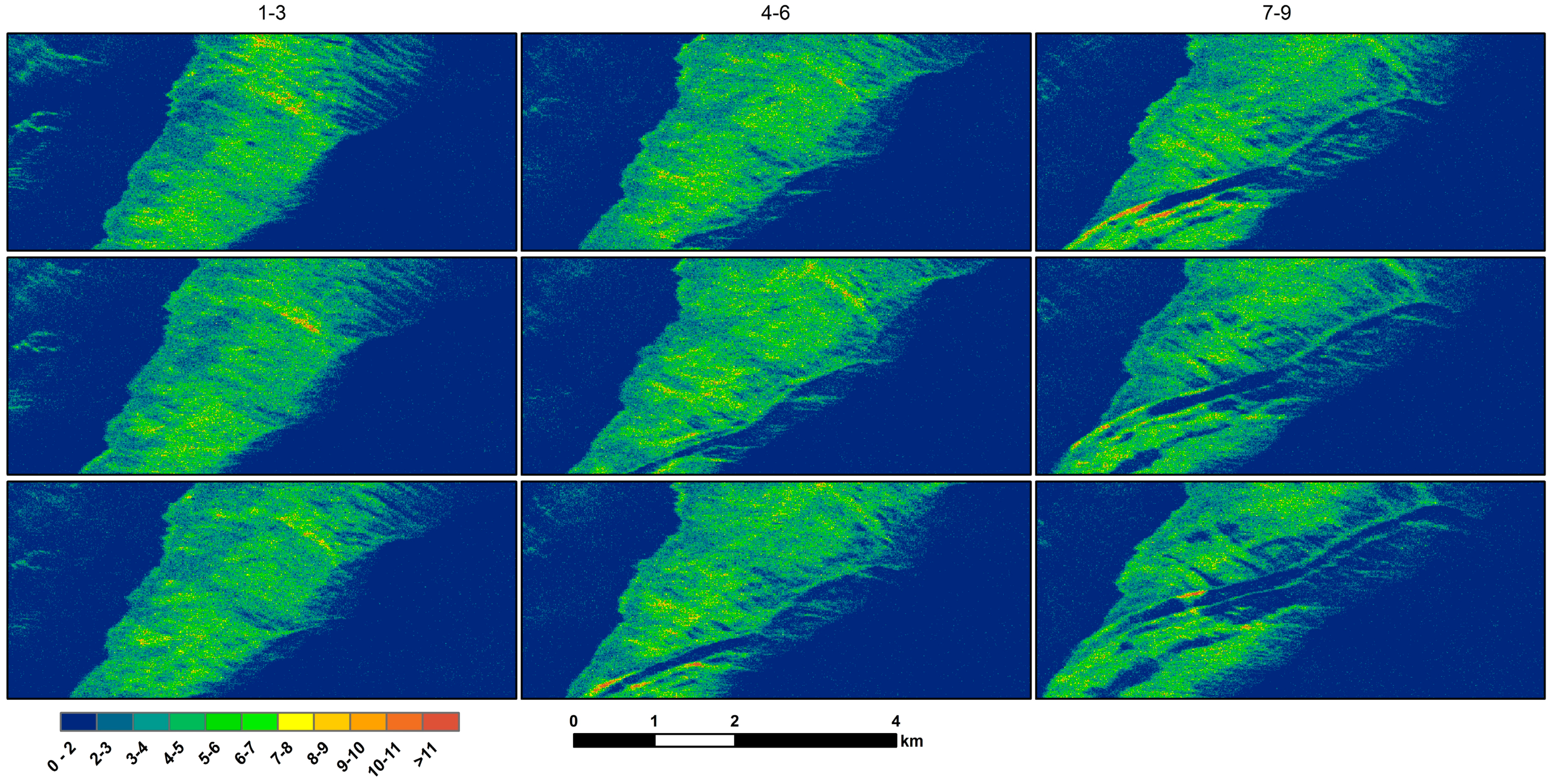
3.2. Oil Slick Characterization
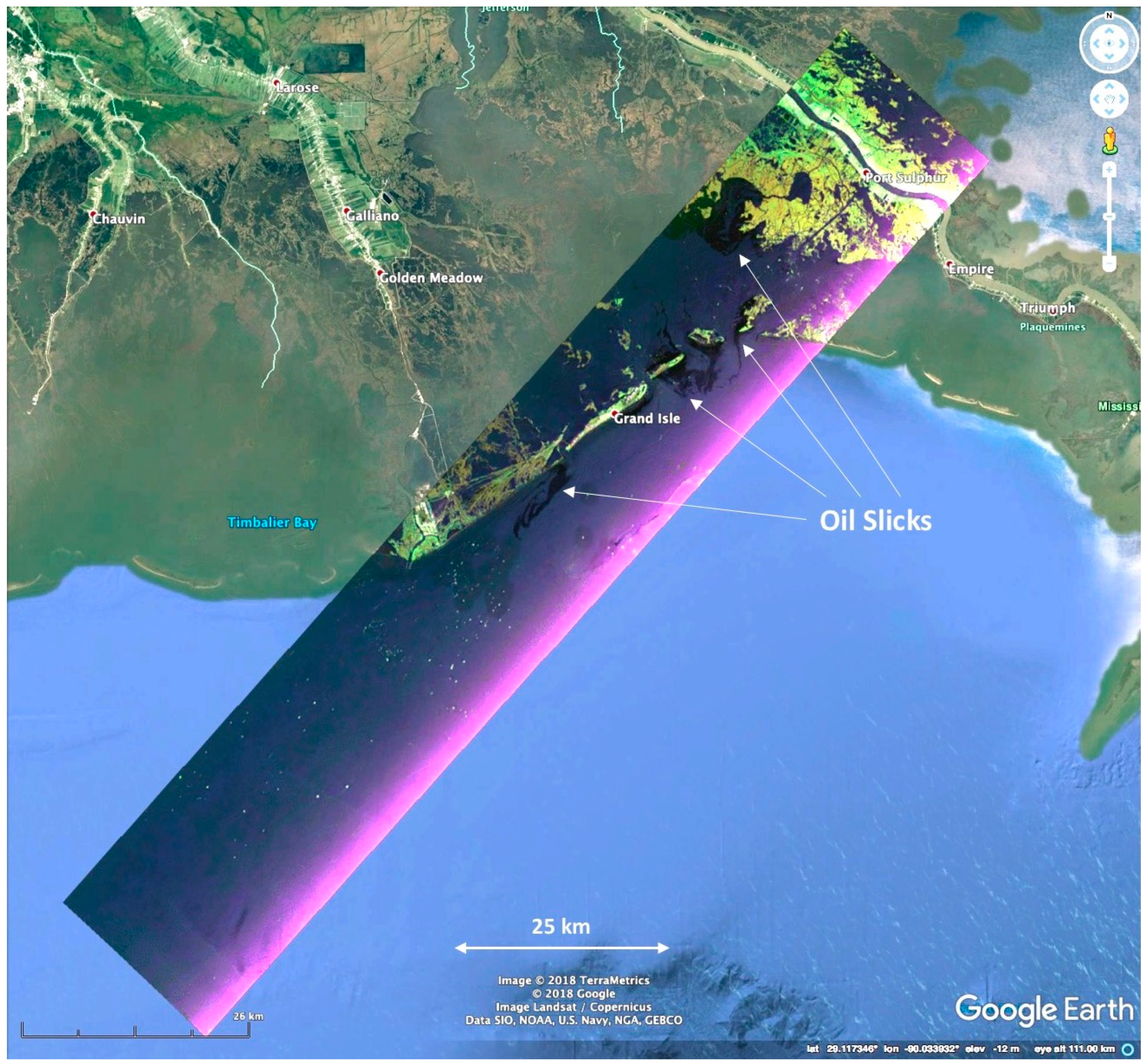
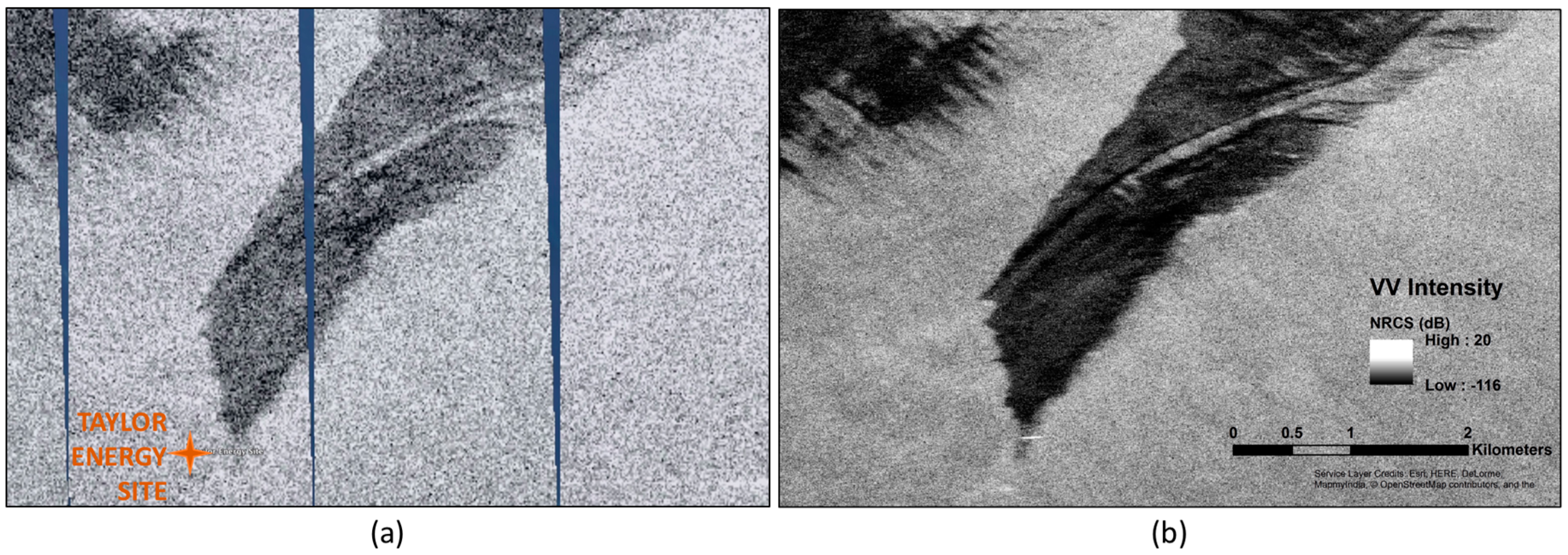
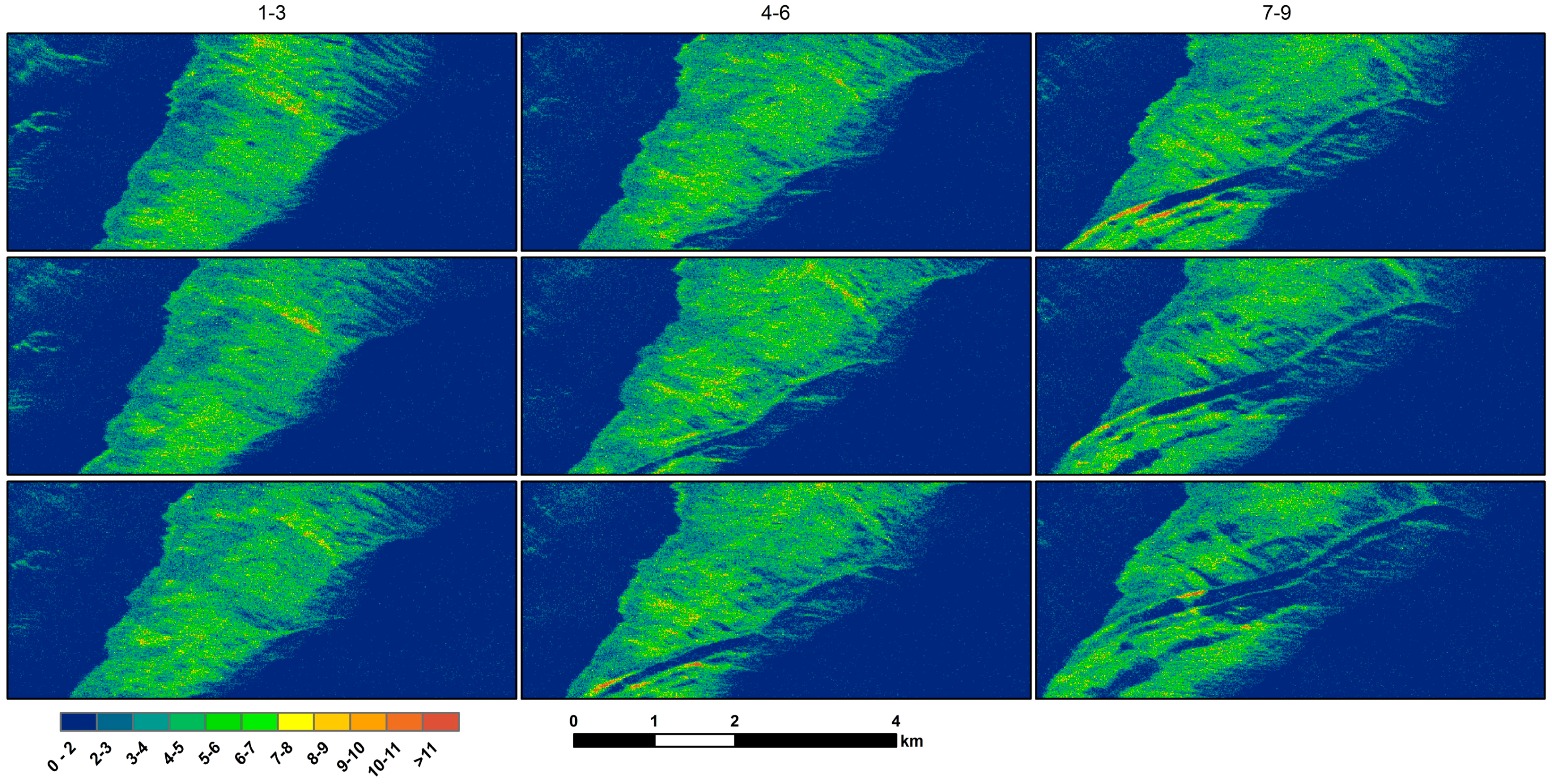
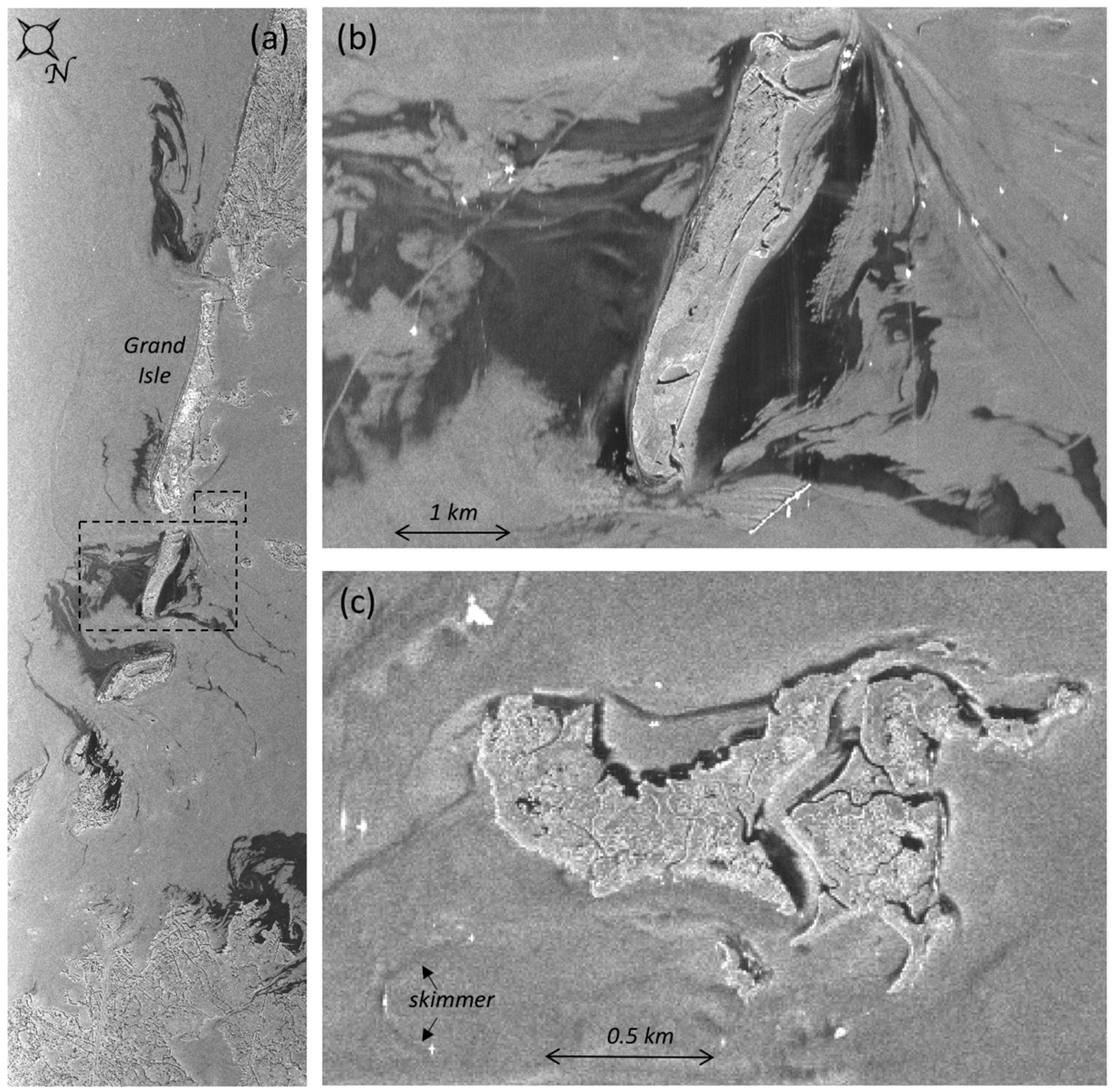
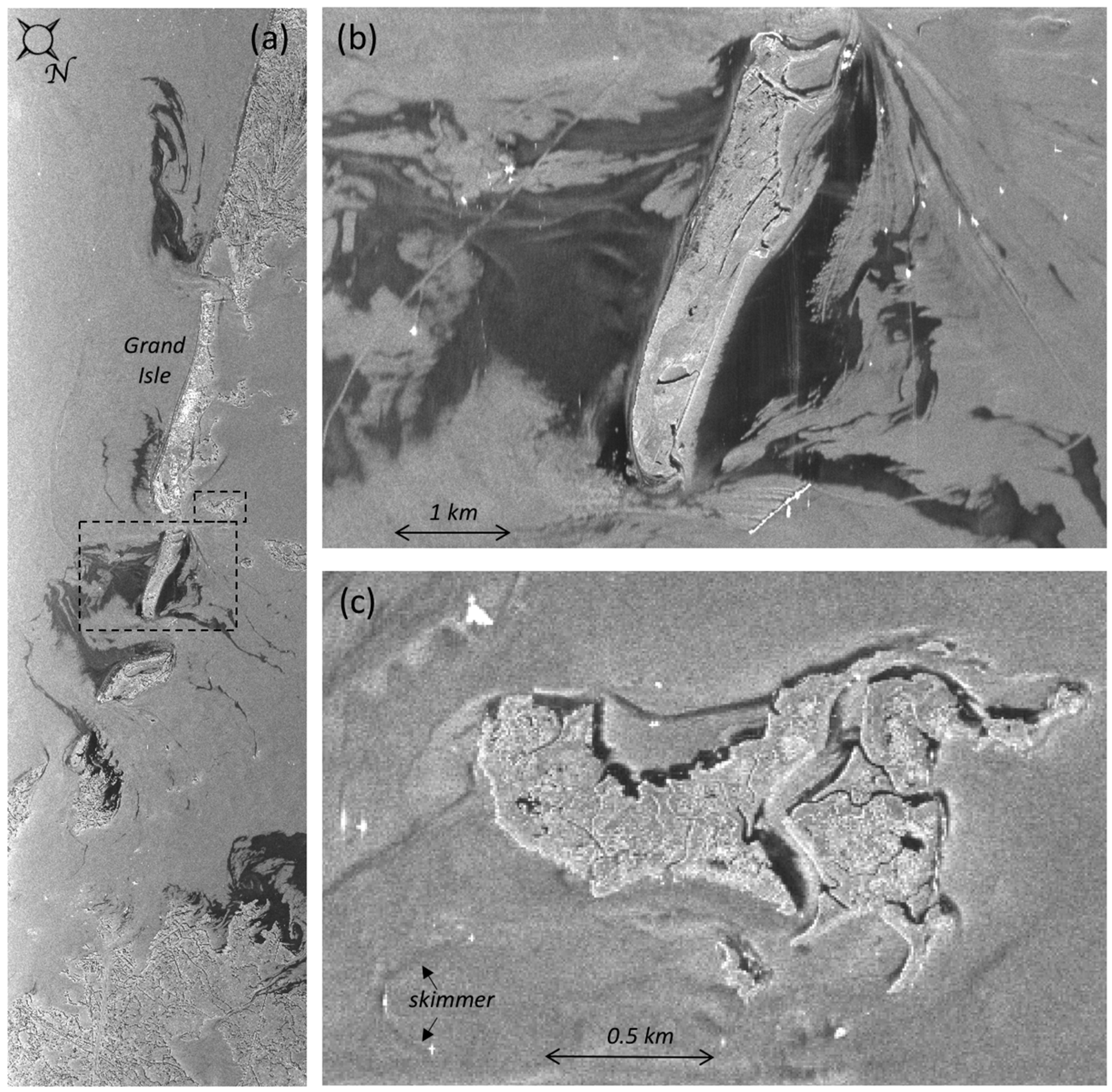
3.3. Slick Identification in Nearshore Waters
4. Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- National Oceanic and Atmospheric Administration, Office of Response and Restoration. Available online: https://response.restoration.noaa.gov (accessed on 15 March 2016).
- National Research Council (US) Committee on Oil in the Sea: Inputs, Fates, and Effects. Oil in the Sea III: Inputs, Fates, and Effects; National Academic Press: Washington, DC, USA, 2003.
- Liu, Y.; MacFadyen, A.; Ji, Z.-G.; Weisberg, R.H. (Eds.) Monitoring and Modeling the Deepwater Horizon Oil Spill: A Record-Breaking Enterprise; Geophysical Monograph Series; American Geophysical Union: Washington, DC, USA, 2011. [Google Scholar] [CrossRef]
- Alves, T.; Kokinou, E.; Zodiatis, G.; Lardner, R.; Panagiotakis, C.; Radhakrishnan, H. Modelling of oil spills in confined maritime basins: The case for early response in the Eastern Mediterranean Sea. Environ. Pollut. 2015, 206, 390–399. [Google Scholar] [CrossRef] [PubMed]
- Lin, Q.; Mendelssohn, I.A.; Suidan, M.T.; Lee, K.; Venosa, A.D. The dose-response relationship between No. 2 fuel oil and the growth of the salt marsh grass, Spartina alterniflora. Mar. Pollut. Bull. 2002, 44, 897–902. [Google Scholar] [CrossRef]
- Pezeshki, S.R.; DeLaune, R.D. United States Gulf of Mexico coastal marsh vegetation responses and sensitivities to oil spill: A review. Environments 2015, 2, 586–607. [Google Scholar] [CrossRef]
- Rangoonwala, A.; Jones, C.E.; Ramsey, E., III. Wetland shoreline recession in the Mississippi River Delta from petroleum oiling and cyclonic storms. Geophys. Res. Lett. 2016, 43, 11652–11660. [Google Scholar] [CrossRef]
- Culbertson, J.B.; Valiela, I.; Pickart, M.; Peacock, E.E.; Reddy, C.M. Long-term consequences of residual petroleum on salt marsh grass. J. Appl. Ecol. 2008, 45, 1284–1292. [Google Scholar] [CrossRef]
- Fingas, M.; Fieldhouse, B. Studies on water-in-oil products from crude oils and petroleum products. Mar. Pollut. Bull. 2012, 64, 272–283. [Google Scholar] [CrossRef] [PubMed]
- Bonn Agreement Accord de Bonn, The Bonn Agreement Oil Appearance Code. Available online: https://www.bonnagreement.org/publications (accessed on 12 January 2018).
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed]
- International Charter, Space and Major Disasters. Available online: https://disasterscharter.org/web/guest/home (accessed on accessed on 11 January 2018).
- Hühnerfuss, H.; Alpers, W.; Garrett, W.D.; Philipp, A.; Lange, P.A.; Siegfried, S. Attenuation of capillary and gravity waves at sea by monomolecular organic surface films. J. Geophys. Res.: Oceans 1983, 88, 9809–9816. [Google Scholar] [CrossRef]
- Alpers, W.; Hühnerfuss, H. Radar signatures of oil films floating on the sea surface and the Marangoni effect. J. Geophys. Res. 1988, 93, 3642–3648. [Google Scholar] [CrossRef]
- Minchew, B.; Jones, C.E.; Holt, B. Polarimetric analysis of backscatter from the Deepwater Horizon oil spill using L-band synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3812–3830. [Google Scholar] [CrossRef]
- Espeseth, M.; Skrunes, S.; Jones, C.E.; Brekke, C.; Holt, B.; Doulgeris, A. Analysis of evolving oil spills in full-polarimetric and hybrid-polarity SAR. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4190–4210. [Google Scholar] [CrossRef]
- Angelliaume, S.; Dubois-Fernandez, P.; Jones, C.E.; Holt, B.; Minchew, B.; Amri, E.; Miegbielle, V. SAR imagery for detecting sea surface slicks: Performance assessment of polarimetric parameters. IEEE Trans. Geosci. Remote Sens. 2018, in press. [Google Scholar]
- Gade, M.; Alpers, W.; Hühnerfuss, H.; Masuko, H.; Kobayashi, T. Imaging of biogenic and anthropogenic ocean surface films by the multifrequency/multipolarization SIR-C/X-SAR. J. Geophys. Res 1998, 103, 18851–18866. [Google Scholar] [CrossRef]
- Alpers, W.; Holt, B.; Zeng, K. Discriminating oil spills from biogenic slicks by imaging radars: Challenges and pitfalls. Remote Sens. Environ. 2017, 201, 133–147. [Google Scholar] [CrossRef]
- Valenzuela, G.R. Theories for the interaction of electromagnetic and oceanic waves—A review. Bound. Layer Meteorol. 1978, 13, 61–85. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive; Artech House: Dedham, MA, USA, 1986. [Google Scholar]
- Brekke, C.; Solberg, A.H.S. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Jones, C.E.; Dagestad, K.-F.; Breivik, O.; Holt, B.; Rohrs, R.; Christensen, K.H.; Espeseth, M.; Brekke, C.; Skrunes, S. Measurement and modeling of oil slick transport. J. Geophys. Res.: Oceans 2016, 121, 7759–7775. [Google Scholar] [CrossRef]
- Davis, R.E. Drifter observations of coastal surface currents during CODE: The method and descriptive view. J. Geophys. Res.: Oceans 1985, 90, 4741–4755. [Google Scholar] [CrossRef]
- Jones, C.E.; Minchew, B.; Holt, B.; Hensley, S. Studies of the Deepwater Horizon oil spill with the UAVSAR radar. In Monitoring and Modeling of the Deepwater Horizon Oil Spill: A Record-Breaking Enterprise; Liu, Y., MacFadyen, A., Ji, Z.-G., Weisberg, R.H., Eds.; American Geophysical Union: Washington, DC, USA, 2011; pp. 33–50. ISBN 9780875904856. [Google Scholar]
- European Space Agency, Sentinel-1: ESA’s Radar Observatory Mission for GMES Operational Services. Available online: https://sentinel.esa.int/documents/247904/349449/S1_SP-1322_1.pdf (accessed on 11 January 2018).
- Genovez, P.; Fieitas, C.; Sant’Anna, S. Oil slicks detection from polarimetric data using stochastic distances between complex Wishart distributions. IEEE Trans. Geosci. Remote Sens. 2017, 10, 463–477. [Google Scholar] [CrossRef]
- Minchew, B. Determining the mixing of oil and sea water using polarimetric synthetic aperture radar. Geophys. Res. Lett. 2012, 39, L16607. [Google Scholar] [CrossRef]
- Garcia-Pineda, O.; MacDonald, I.; Hu, C.; Svejkovsky, J.; Hess, M.; Dukhovskoy, D.; Morey, S.L. Detection of floating oil anomalies from the Deepwater Horizon oil spill with synthetic aperture radar. Oceanography 2013, 26, 124–137. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Jones, C.E.; Holt, B. A multisensor comparison of experimental oil spills in polarimetric SAR. IEEE JSTARS 2016, 9, 4948–4961. [Google Scholar] [CrossRef]
- Hensley, S.; Zebker, H.A.; Jones, C.E.; Michel, T.; Muellerschoen, R.; Chapman, B. First deformation results using the NASA/JPL UAVSAR instrument. In Proceedings of the 2nd Asian-Pacific Conference on Synthetic Aperture Radar (APSAR), Shanxi, China, 26–30 October 2009; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2009; pp. 1051–1055. [Google Scholar] [CrossRef]
- Fore, A.G.; Chapman, B.D.; Hawkins, B.P.; Hensley, S.; Jones, C.E.; Michel, T.R.; Muellerschoen, R.J. UAVSAR polarimetric calibration. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3481–3491. [Google Scholar] [CrossRef]
- American Society of Chemical Engineers (ASCE) Task Committee on Modeling of Oil Spills. State-of-the-art review of modeling transport and fate of oil spills. J. Hydraul. Eng. 1996, 122, 594–609. [Google Scholar] [CrossRef]
- Apel, J.R. Oceanic Internal Waves and Solitons. In Synthetic Aperture Radar Marine User’s Manual; Jackson, C.R., Apel, J.R., Eds.; NOAA NESDIS Office of Research and Applications: Washington, DC, USA, 2004; pp. 189–206. [Google Scholar]
- Espedal, H.A.; Wahl, T. Satellite SAR oil spill detection using wind history information. Int. J. Remote Sens. 1999, 20, 49–65. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Frequency | 1.2575 GHz |
| Wavelength | 23.79 cm |
| Bandwidth | 80 MHz |
| Polarization | HH, HV, VV, VH |
| Operating Altitude | 12.5 km (typical) |
| Ground Speed | 220 m/s (typical) |
| Swath Width | 22 km |
| Slant Range Resolution | 1.7 m |
| Along Track Resolution | 0.8 m |
| Transmit Power | 3 kW |
| Noise Equivalent Sigma Naught | >−55 dB (see [33] for the profile) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jones, C.E.; Holt, B. Experimental L-Band Airborne SAR for Oil Spill Response at Sea and in Coastal Waters. Sensors 2018, 18, 641. https://doi.org/10.3390/s18020641
Jones CE, Holt B. Experimental L-Band Airborne SAR for Oil Spill Response at Sea and in Coastal Waters. Sensors. 2018; 18(2):641. https://doi.org/10.3390/s18020641
Chicago/Turabian StyleJones, Cathleen E., and Benjamin Holt. 2018. "Experimental L-Band Airborne SAR for Oil Spill Response at Sea and in Coastal Waters" Sensors 18, no. 2: 641. https://doi.org/10.3390/s18020641
APA StyleJones, C. E., & Holt, B. (2018). Experimental L-Band Airborne SAR for Oil Spill Response at Sea and in Coastal Waters. Sensors, 18(2), 641. https://doi.org/10.3390/s18020641