A Novel Method for Remote Depth Estimation of Buried Radioactive Contamination



Abstract
:
1. Introduction
2. Materials and Methods
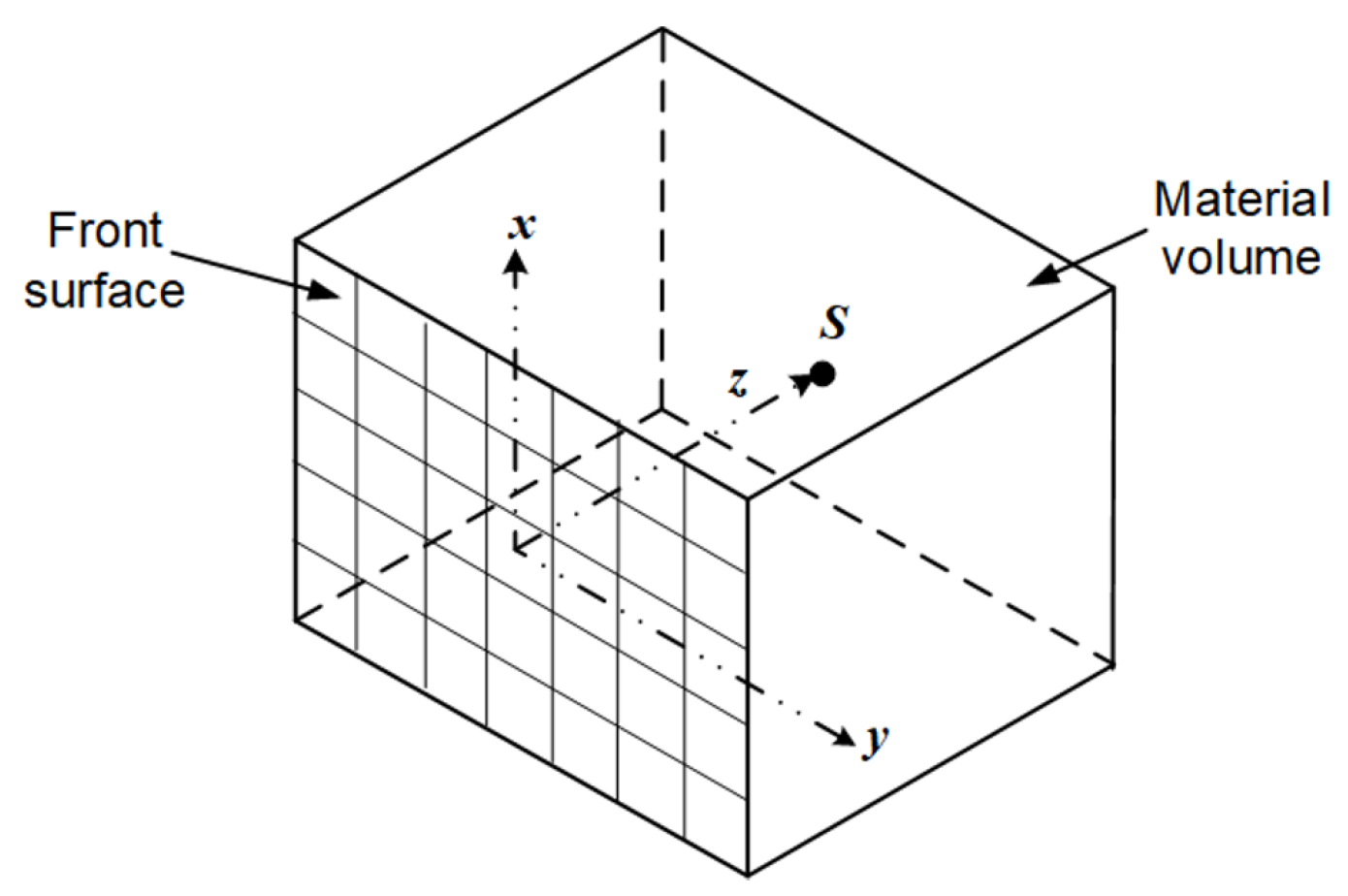
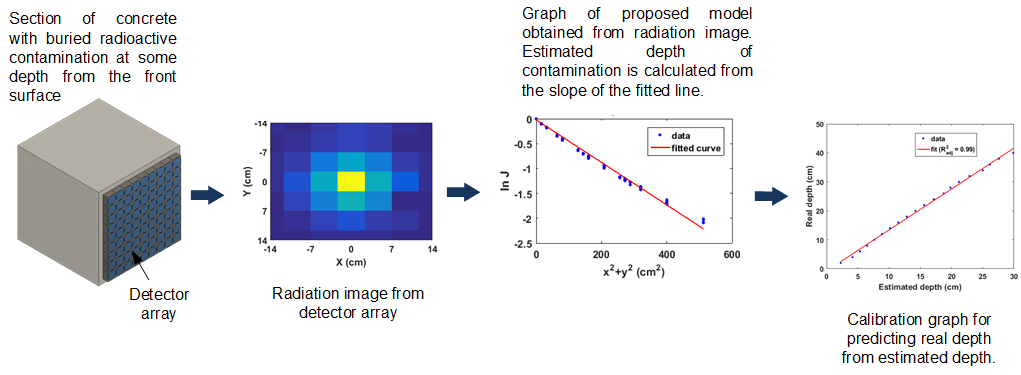
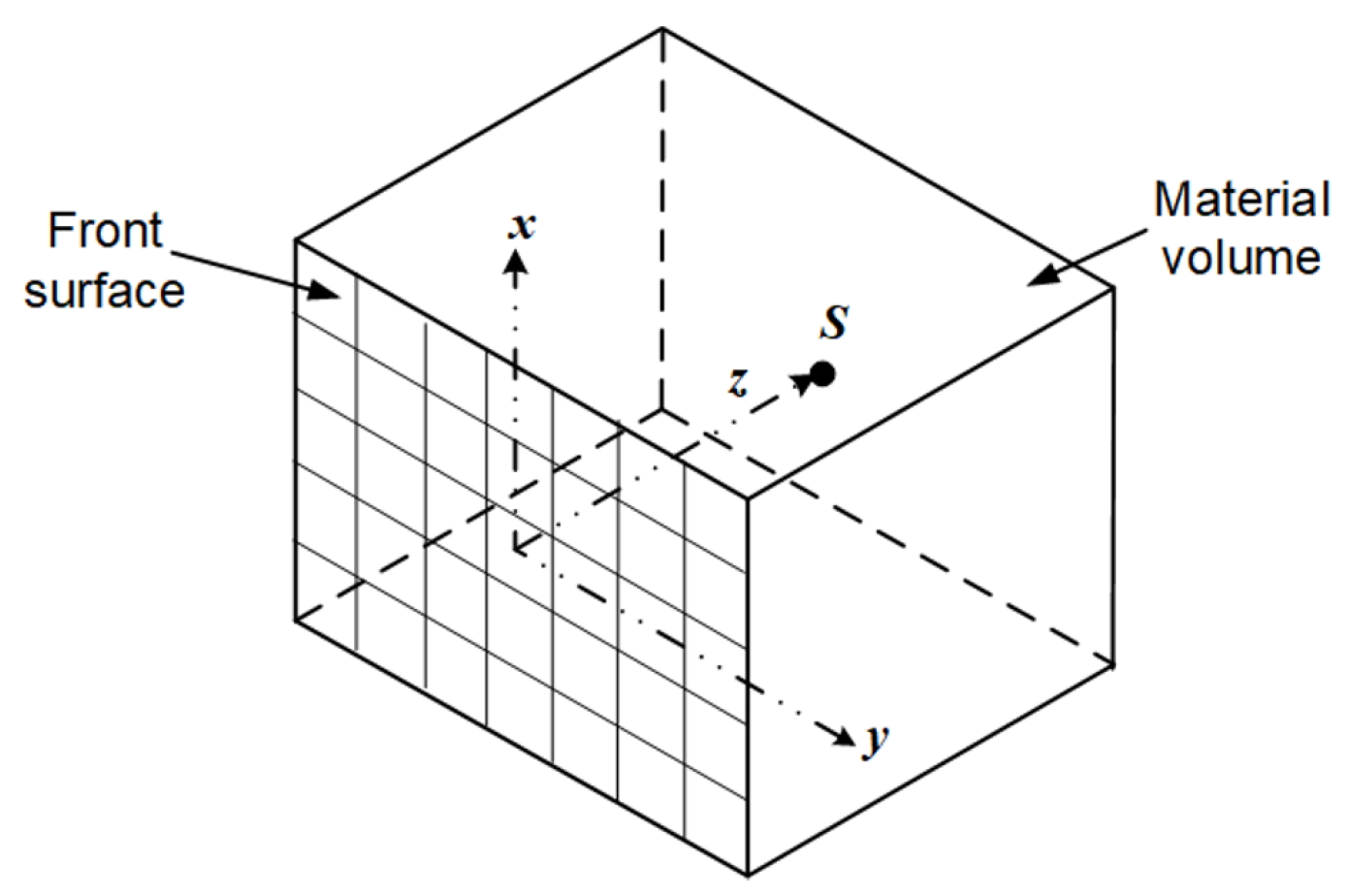
2.1. The Approximate 3D Linear Attenuation Model
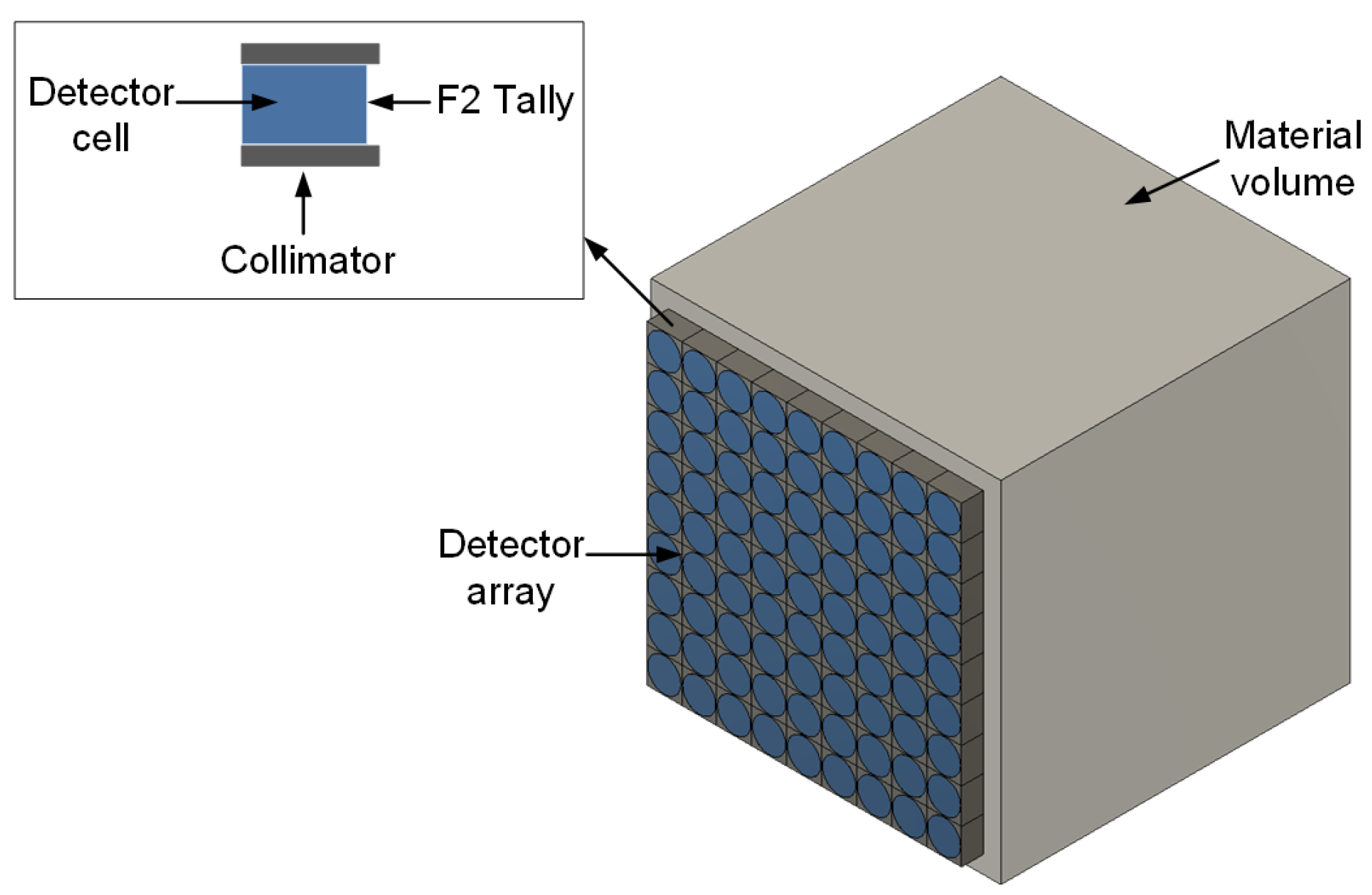
2.2. Monte Carlo Modelling and Simulation
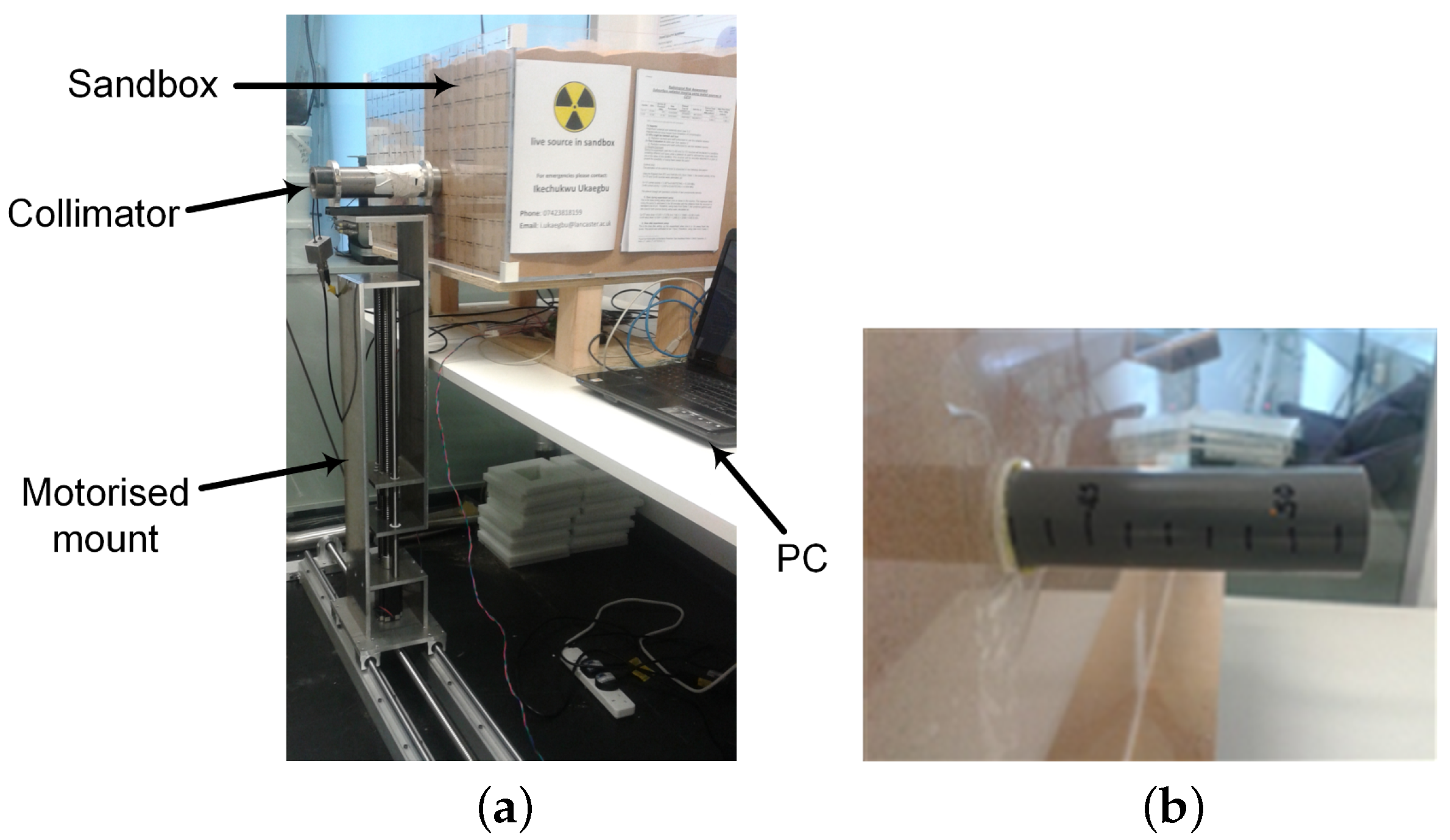
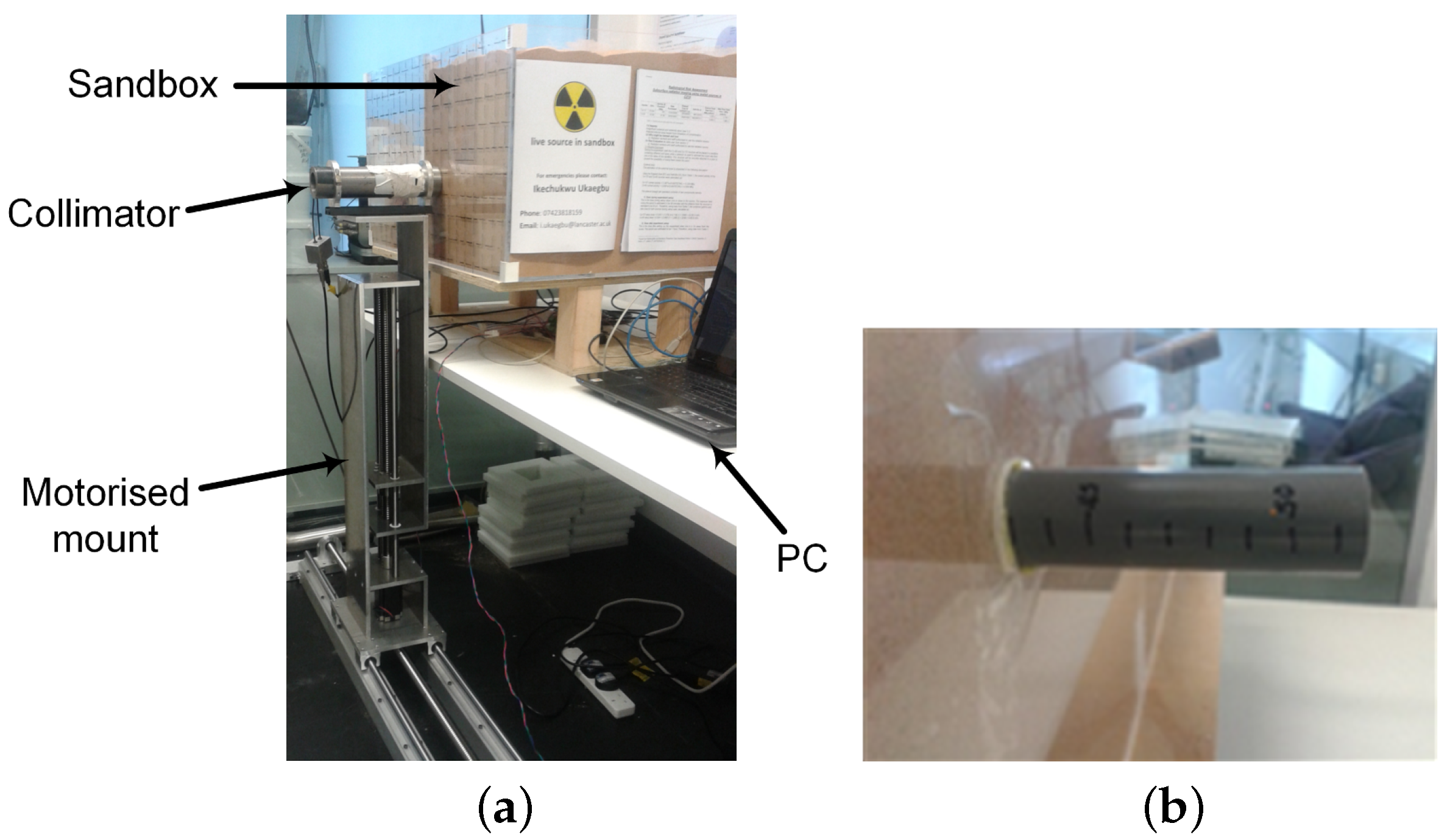
2.3. Experiment Setup
3. Results
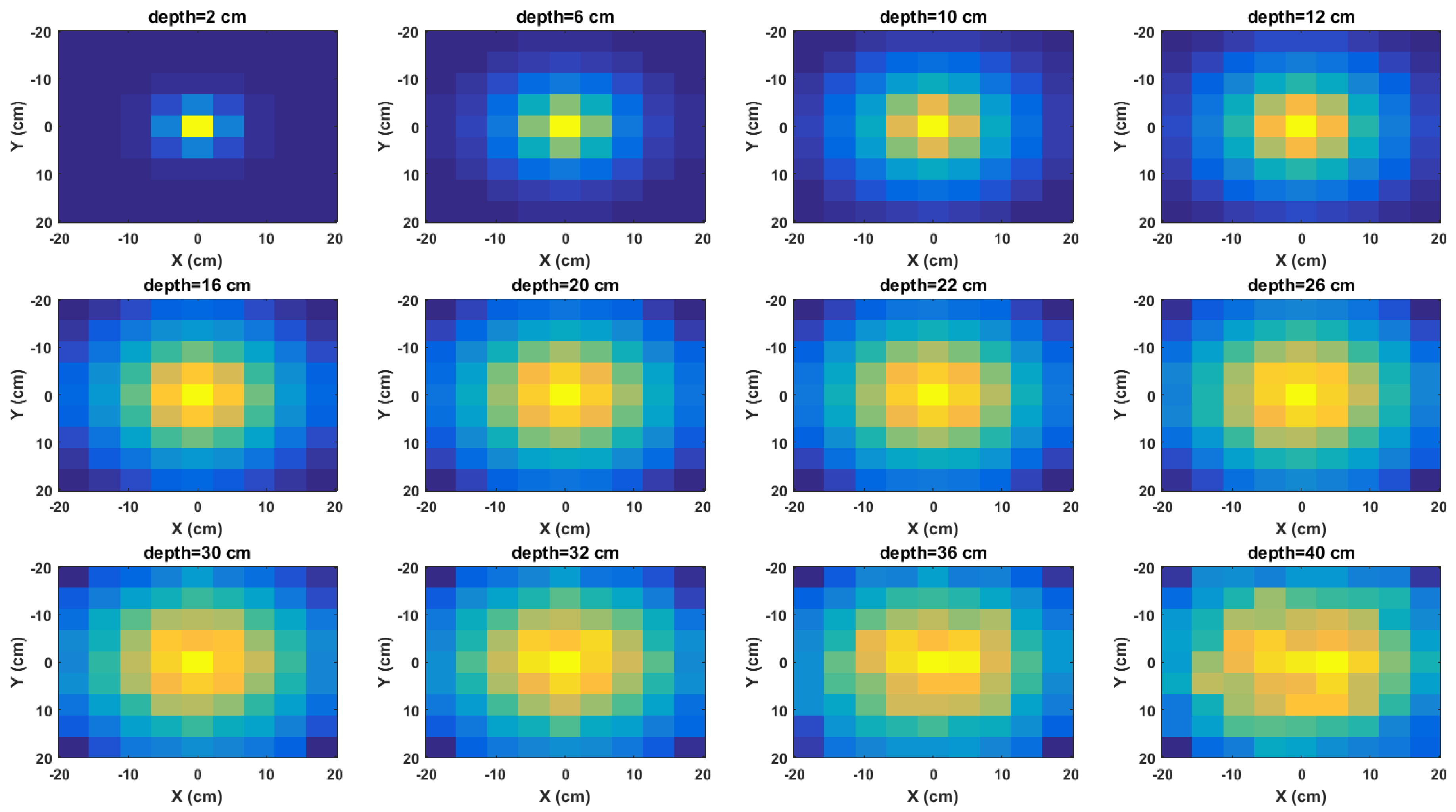
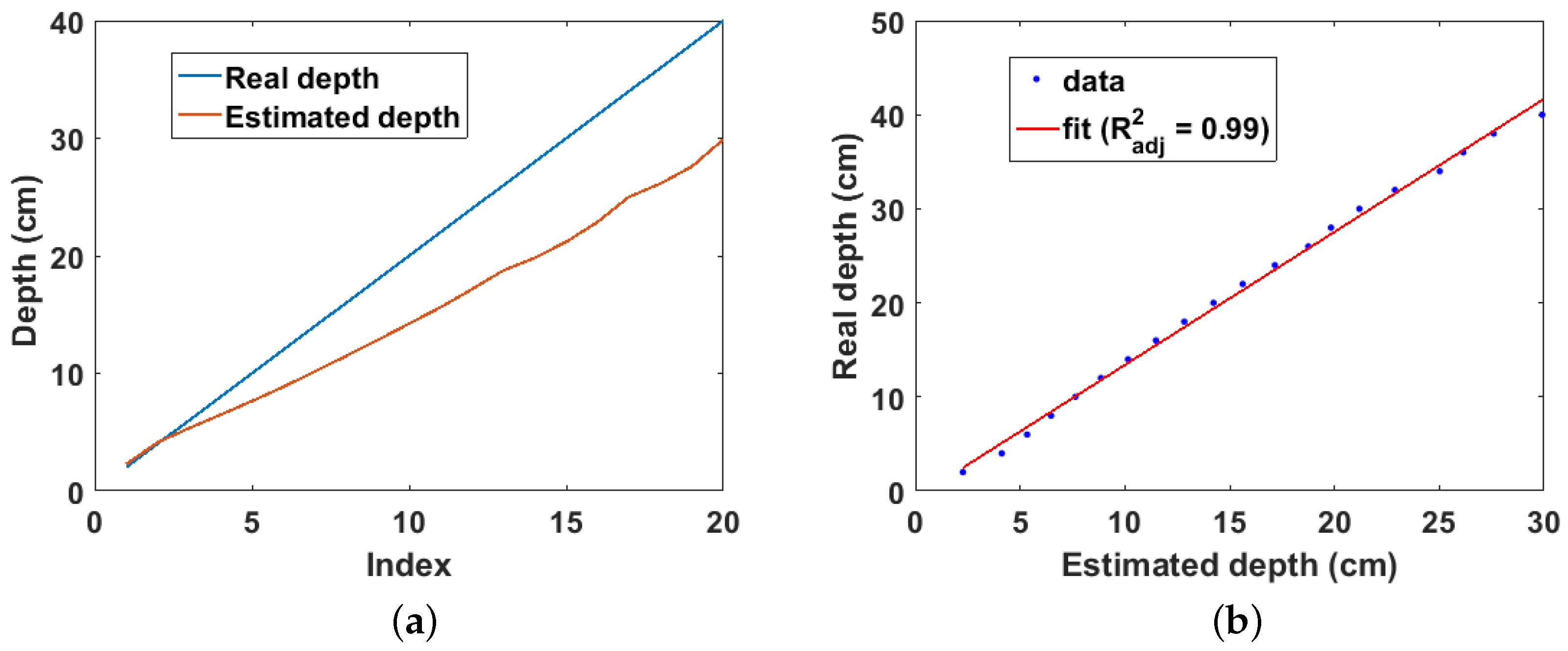
3.1. Simulation Results for Cs-137 Buried in Sand
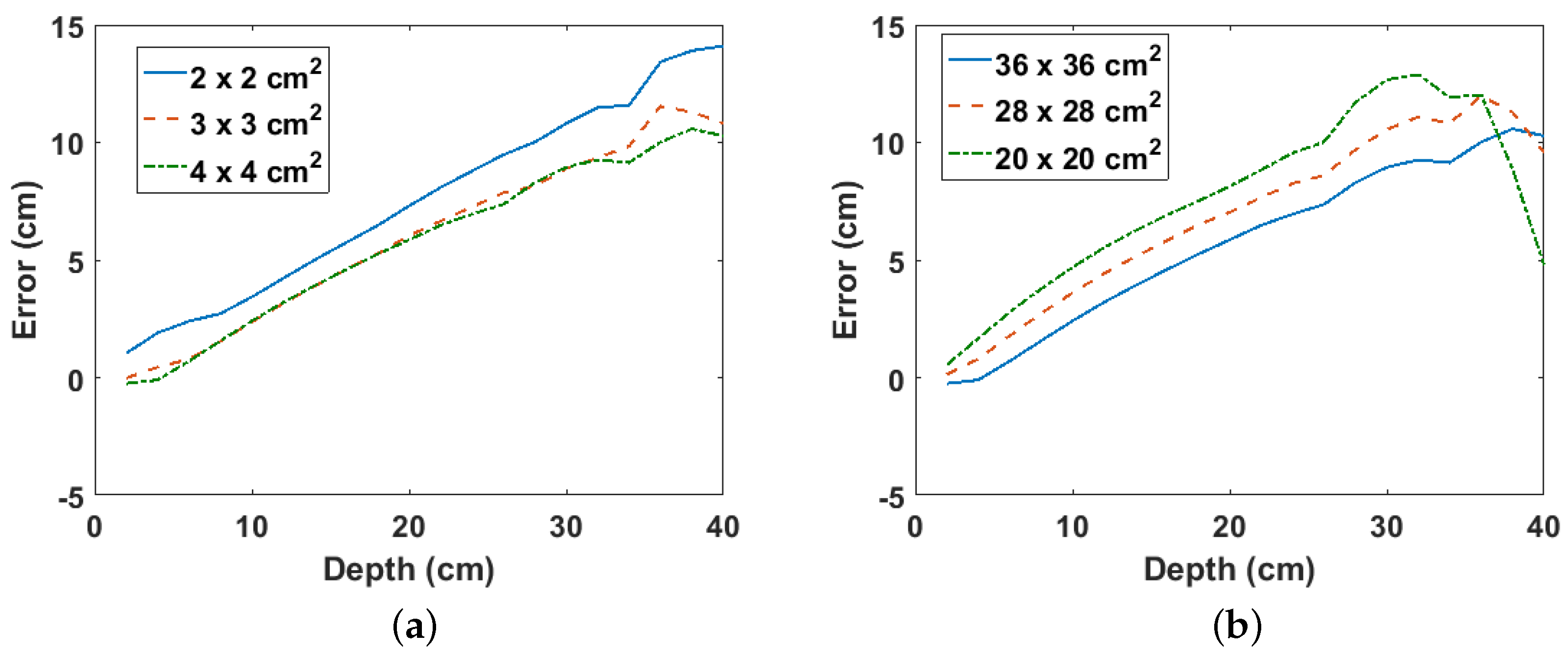
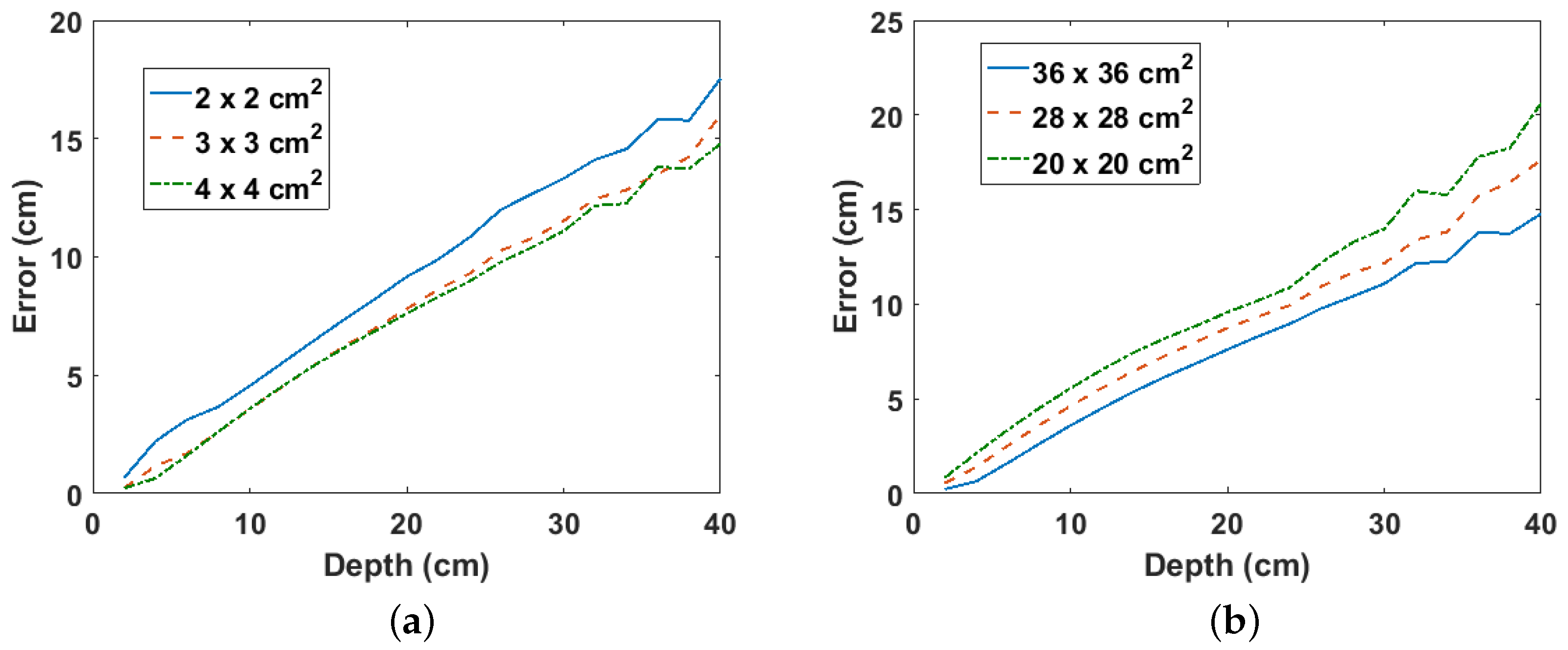
3.1.1. Effects of Scan Area and Grid Cell Size
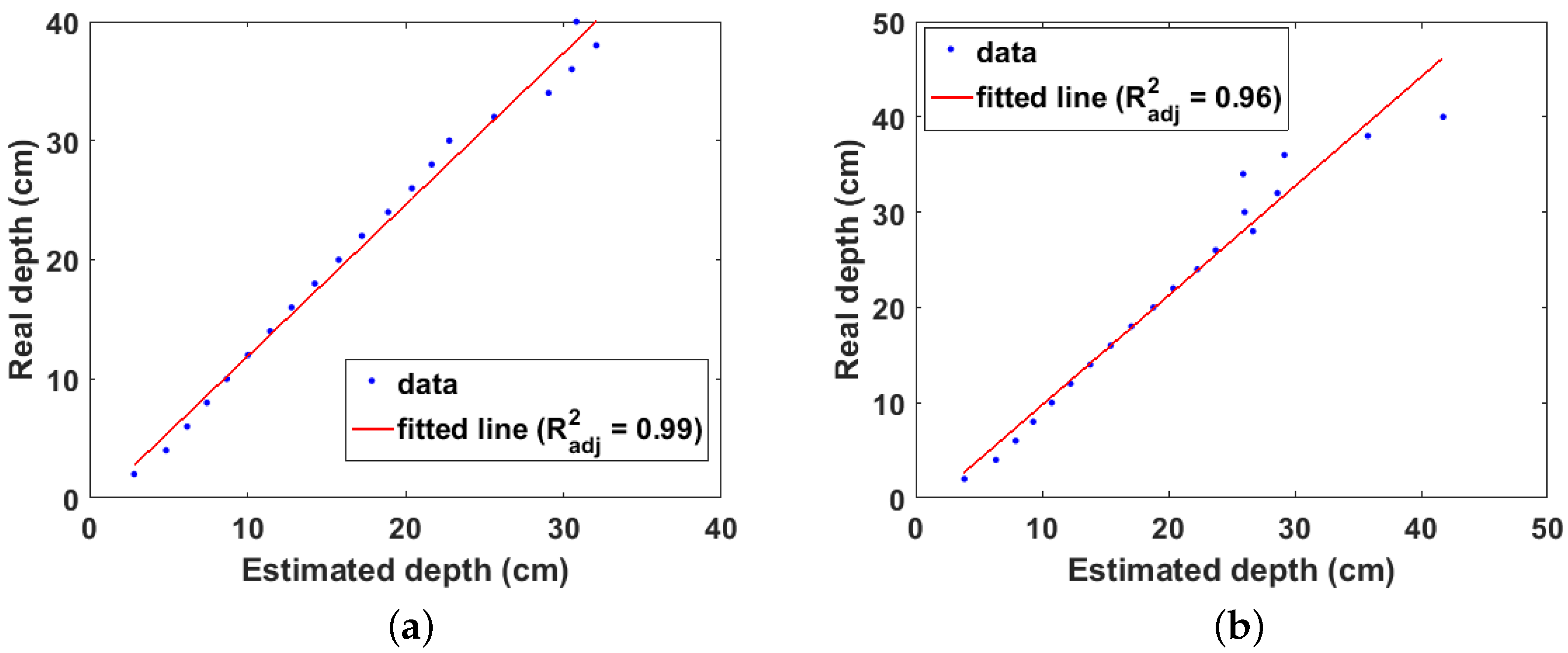
3.2. Simulation Results for Cs-137 Buried in Concrete
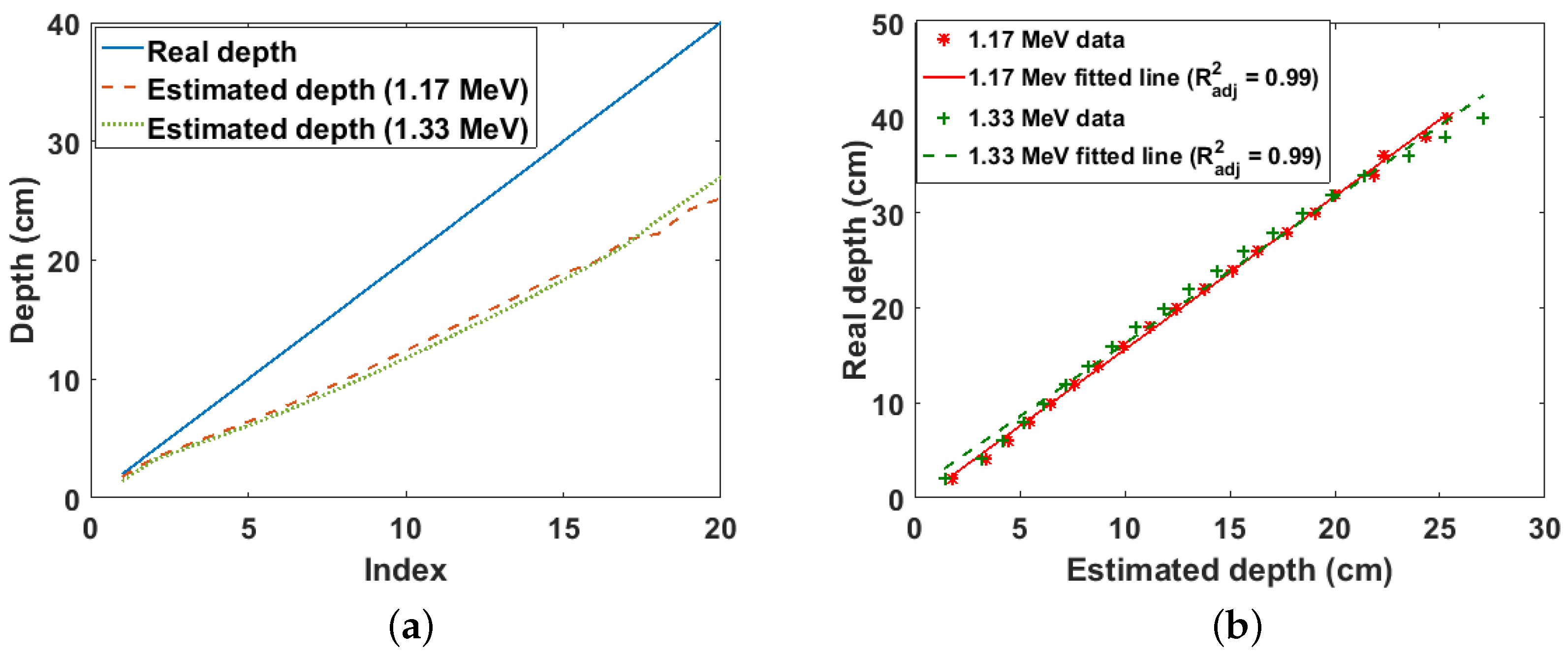
3.3. Simulation Results for Co-60 Buried in Sand and Concrete
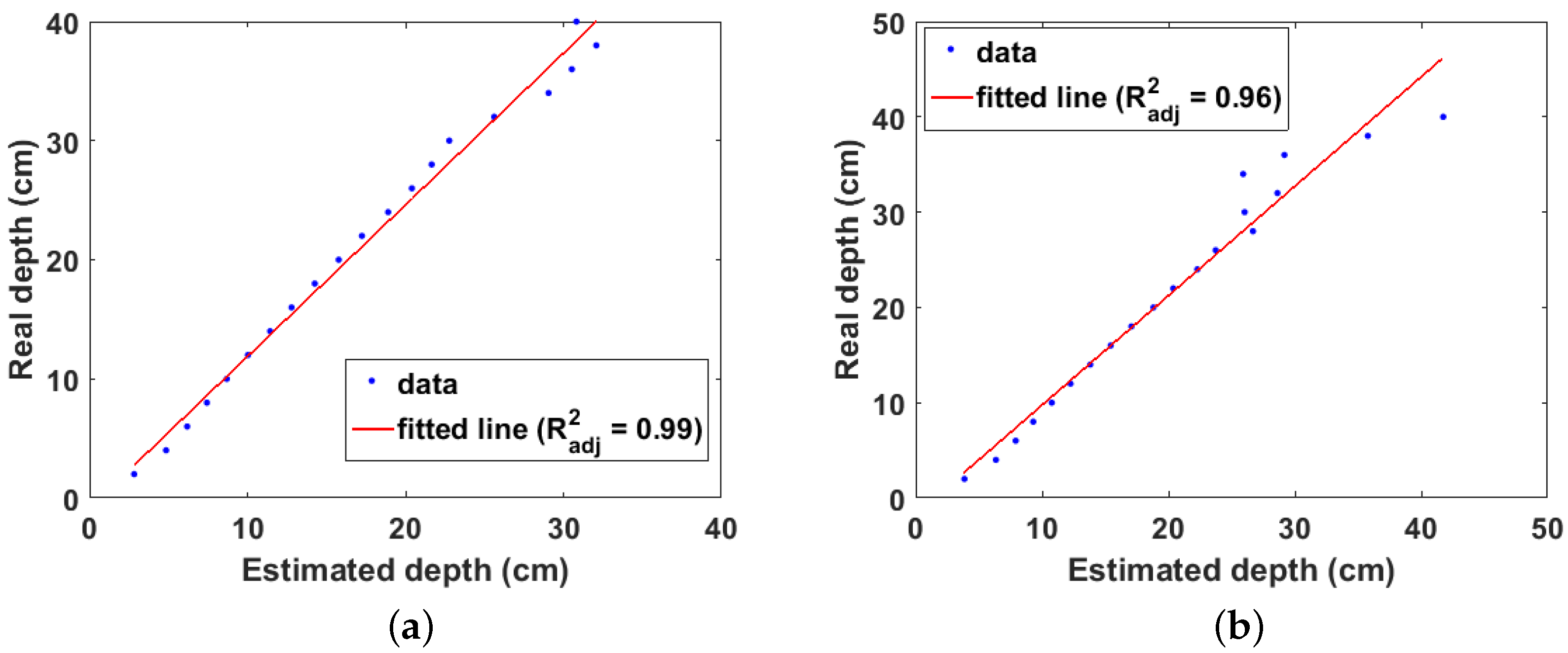
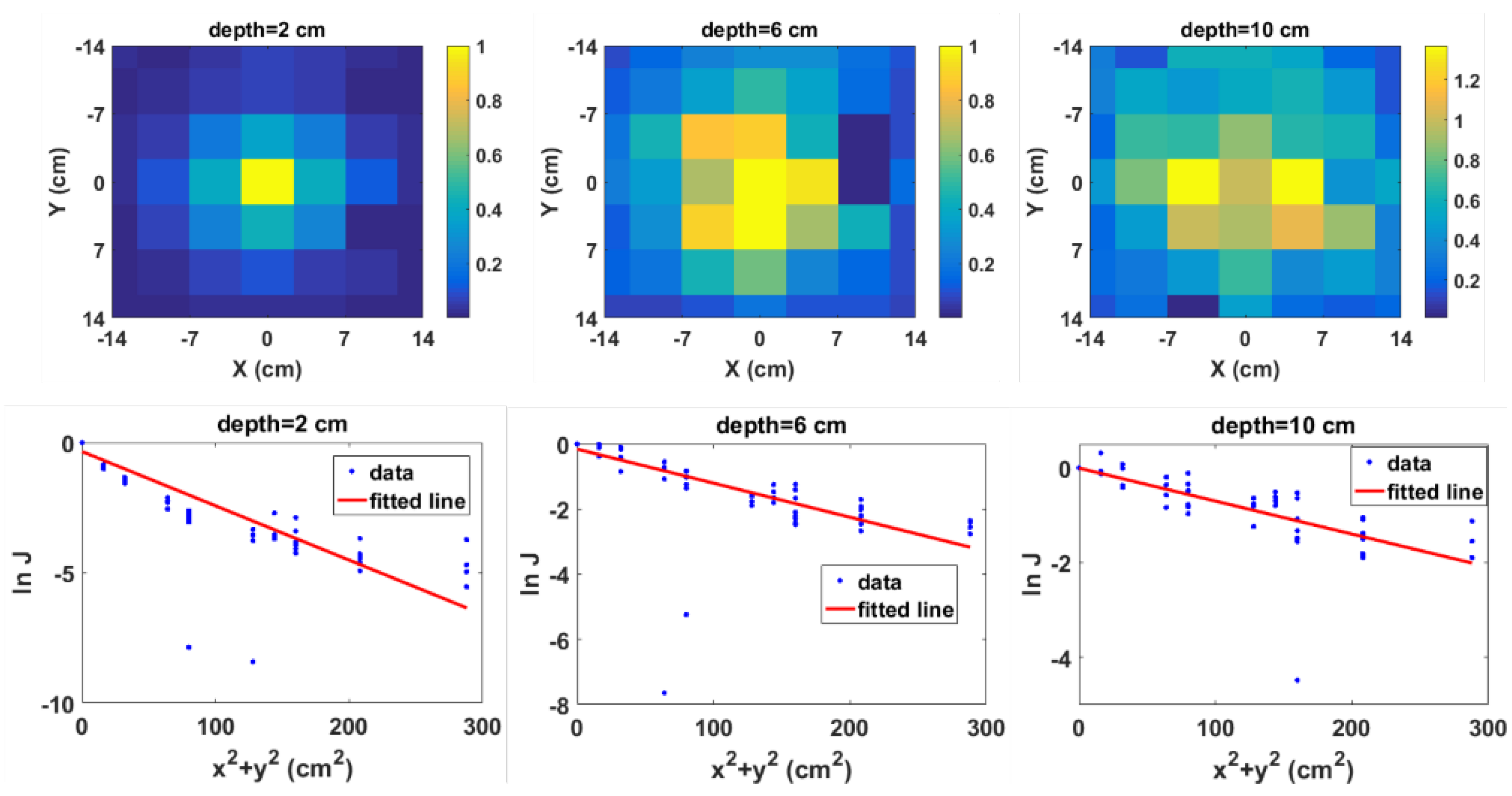
3.4. Experiment Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Laraia, M.T. Nuclear Decommissioning: Planning, Execution and International Experience; Woodhead Publishing Limited: Cambridge, UK, 2012. [Google Scholar]
- Martin, P.G.; Moore, J.; Fardoulis, J.S.; Payton, O.D.; Scott, T.B. Radiological assessment on interest areas on the sellafield nuclear site via unmanned aerial vehicle. Remote Sens. 2016, 8, 913. [Google Scholar] [CrossRef]
- International Atomic Energy Agency. Decommissioning of Facilities; International Atomic Energy Agency: Vienna, Austria, 2014. [Google Scholar]
- Towler, J.; Krawiec, B.; Kochersberger, K. Terrain and Radiation Mapping in Post-Disaster Environments Using an Autonomous Helicopter. Remote Sens. 2012, 4, 1995–2015. [Google Scholar] [CrossRef]
- Norris, W.E.; Naus, D.J.; Graves, H.L. Inspection of nuclear power plant containment structures. Nucl. Eng. Des. 1999, 192, 303–329. [Google Scholar] [CrossRef]
- Miller, B.; Foster, A.; Nuvia, M.D.; Hill, M.; Foster, A. Pipeline Characterisation and Decommissioning within the Nuclear Industry: Technology Review and Site Experience; Technical Report 2; Nuclear Decommissioning Authority: Cumbria, UK, 2016. [Google Scholar]
- Popp, A.; Ardouin, C.; Alexander, M.; Blackley, R.; Murray, A. Improvement of a high risk category source buried in the grounds of a hospital in Cambodia. In Proceedings of the 13th International Congress of the International Radiation Protection Association, Glasgow, UK, 14–18 May 2012; pp. 1–10. [Google Scholar]
- Lal, R.; Fifield, L.; Tims, S.; Wasson, R. 239 Pu fallout across continental Australia: Implications on 239 Pu use as a soil tracer. J. Environ. Radioact. 2017, 178-179, 394–403. [Google Scholar] [CrossRef] [PubMed]
- Charles, M.; Harrison, J.; Darley, P.; Fell, T. Health implications of Dounreay fuel fragments: Estimates of doses and risks. In Proceedings of the Seventh International Symposium of the Society for Radiological Protection, Cardiff, UK, 12–17 June 2005; pp. 23–29. [Google Scholar]
- Wilkins, B.T.; Harrison, J.D.; Smith, K.R.; Phipps, A.W.; Bedwell, P.; Etherington, G.; Youngman, M.; Fell, T.P.; Charles, M.W.; Darley, P.J. Health Implications of Fragments of Irradiated Fuel at the Beach at Sandside Bay Module 6: Overall Results; Technical Report; Health Protection Agency: Oxfordshire, UK, 2006. [Google Scholar]
- Sullivan, P.O.; Nokhamzon, J.G.; Cantrel, E. Decontamination and dismantling of radioactive concrete structures. NEA News 2010, 28, 27–29. [Google Scholar]
- Maeda, K.; Sasaki, S.; Kumai, M.; Sato, I.; Suto, M.; Ohsaka, M.; Goto, T.; Sakai, H.; Chigira, T.; Murata, H. Distribution of radioactive nuclides of boring core samples extracted from concrete structures of reactor buildings in the Fukushima Daiichi Nuclear Power Plant. J. Nucl. Sci. Technol. 2014, 51, 1006–1023. [Google Scholar] [CrossRef]
- Shippen, A.; Joyce, M.J. Profiling the depth of caesium-137 contamination in concrete via a relative linear attenuation model. Appl. Radiat. Isot. 2010, 68, 631–634. [Google Scholar] [CrossRef] [PubMed]
- Shippen, B.A.; Joyce, M.J. Extension of the linear depth attenuation method for the radioactivity depth analysis tool(RADPAT). IEEE Trans. Nucl. Sci. 2011, 58, 1145–1150. [Google Scholar] [CrossRef]
- Adams, J.C.; Mellor, M.; Joyce, M.J. Depth determination of buried caesium-137 and cobalt-60 sources using scatter peak data. IEEE Trans. Nucl. Sci. 2010, 57, 2752–2757. [Google Scholar] [CrossRef]
- Adams, J.C.; Mellor, M.; Joyce, M.J. Determination of the depth of localized radioactive contamination by 137Cs and 60Co in sand with principal component analysis. Environ. Sci. Technol. 2011, 45, 8262–8267. [Google Scholar] [CrossRef] [PubMed]
- Adams, J.C.; Joyce, M.J.; Mellor, M. The advancement of a technique using principal component analysis for the non-intrusive depth profiling of radioactive contamination. Nucl. Sci. IEEE Trans. 2012, 59, 1448–1452. [Google Scholar] [CrossRef]
- Adams, J.C.; Joyce, M.J.; Mellor, M. Depth profiling 137Cs and 60Co non-intrusively for a suite of industrial shielding materials and at depths beyond 50 mm. Appl. Radiat. Isot. 2012, 70, 1150–1153. [Google Scholar] [CrossRef] [PubMed]
- Knoll, G. Radiation Interactions. In Radiation Detection and Measurement, 4th ed.; John Wiley and Sons Inc.: Hoboken, NJ, USA, 2010; Chapter 2; pp. 47–53. [Google Scholar]
- Pelowitz, D.B. MCNPX User’s Manual: Version 2.7.0; Los Alamos National Laboratory: Los Alamos, NM, USA, 2011. [Google Scholar]
- McConn, R.; Gesh, C.J.; Pagh, R.; Rucker, R.A.; Williams, R. Compendium of Material Composition Data for Radiation Transport Modelling; Technical Report; Pacific Northwest National Laboratory: Richland, WA, USA, 2011. [Google Scholar]
- Eljen Technology. Neutron/Gamma Psd Liquid Scintillator Ej-301, Ej-309, 2016. Available online: http://www.eljentechnology.com/images/products/data_sheets/EJ-301_EJ-309.pdf (accessed on 6 December 2017).
- National Institute of Standards and Technology. X-Ray Mass Attenuation Coefficients; National Institute of Standards and Technology: Gaithersburg, MD, USA. Available online: https://www.nist.gov/pml/x-ray-mass-attenuation-coefficients. (accessed on 16 November 2017).
- Miller, B.; Foster, A.; Burgess, P.; Metrology, R.; Hill, M.; Foster, A. Pipeline Characterisation and Decommissioning within the Nuclear Industry: Good Practice Guide; Technical Report 2; Nuclear Decommissioning Authority: Cumbria, UK, 2016. [Google Scholar]
- Kouzes, R.T.; Ely, J.H.; Milbrath, B.D.; Schweppe, J.E.; Siciliano, E.R.; Stromswold, D.C. Spectroscopic and non-spectroscopic radiation portal applications to border security. In Proceedings of the IEEE Nuclear Science Symposium Conference Record, Fajardo, Puerto Rico, 23–29 October 2005; Volume 1, pp. 321–325. [Google Scholar]
- Ukaegbu, I.K.; Gamage, K.A.A. Ground Penetrating Radar as a Contextual Sensor for Multi-Sensor Radiological Characterisation. Sensors 2017, 17. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elements | Weight Fraction | ||
|---|---|---|---|
| Sand | Ordinary Concrete | High Density Concrete | |
| (density =1.7 g cm) | (density =2.18 g cm) | (density = 3.35 g cm) | |
| H | 0.007833 | 0.004000 | 0.003585 |
| C | 0.003360 | - | - |
| O | 0.536153 | 0.482102 | 0.311622 |
| Na | 0.017063 | 0.002168 | - |
| Mg | - | 0.014094 | 0.001195 |
| Al | 0.034401 | 0.069387 | 0.004183 |
| Si | 0.365067 | 0.277549 | 0.010457 |
| K | 0.011622 | 0.013010 | - |
| Ca | 0.011212 | 0.080229 | 0.050194 |
| Fe | 0.013289 | 0.057461 | 0.047505 |
| S | - | - | 0.107858 |
| Ba | - | - | 0.463400 |
| 1.000000 | 1.000000 | 1.000000 | |
| Material | Cs-137 | Co-60 | |
|---|---|---|---|
| 600–700 keV | 1.1–1.2 keV | 1.3–1.4 keV | |
| Sand | 0.0800 | 0.0606 | 0.0557 |
| Concrete 1 ( g cm) | 0.0795 | 0.0602 | 0.0553 |
| Concrete 2 ( g cm) | 0.0809 | 0.0576 | 0.0526 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ukaegbu, I.K.; Gamage, K.A.A. A Novel Method for Remote Depth Estimation of Buried Radioactive Contamination. Sensors 2018, 18, 507. https://doi.org/10.3390/s18020507
Ukaegbu IK, Gamage KAA. A Novel Method for Remote Depth Estimation of Buried Radioactive Contamination. Sensors. 2018; 18(2):507. https://doi.org/10.3390/s18020507
Chicago/Turabian StyleUkaegbu, Ikechukwu Kevin, and Kelum A. A. Gamage. 2018. "A Novel Method for Remote Depth Estimation of Buried Radioactive Contamination" Sensors 18, no. 2: 507. https://doi.org/10.3390/s18020507
APA StyleUkaegbu, I. K., & Gamage, K. A. A. (2018). A Novel Method for Remote Depth Estimation of Buried Radioactive Contamination. Sensors, 18(2), 507. https://doi.org/10.3390/s18020507