Damage Localization of Beam Bridges Using Quasi-Static Strain Influence Lines Based on the BOTDA Technique



Abstract
1. Introduction
2. Approach for Localizing the Damage of Bridges Using Quasi-Static Strain ILs
2.1. Obtaining the Quasi-Static Strain ILs of Bridges Based on the BOTDA Technique
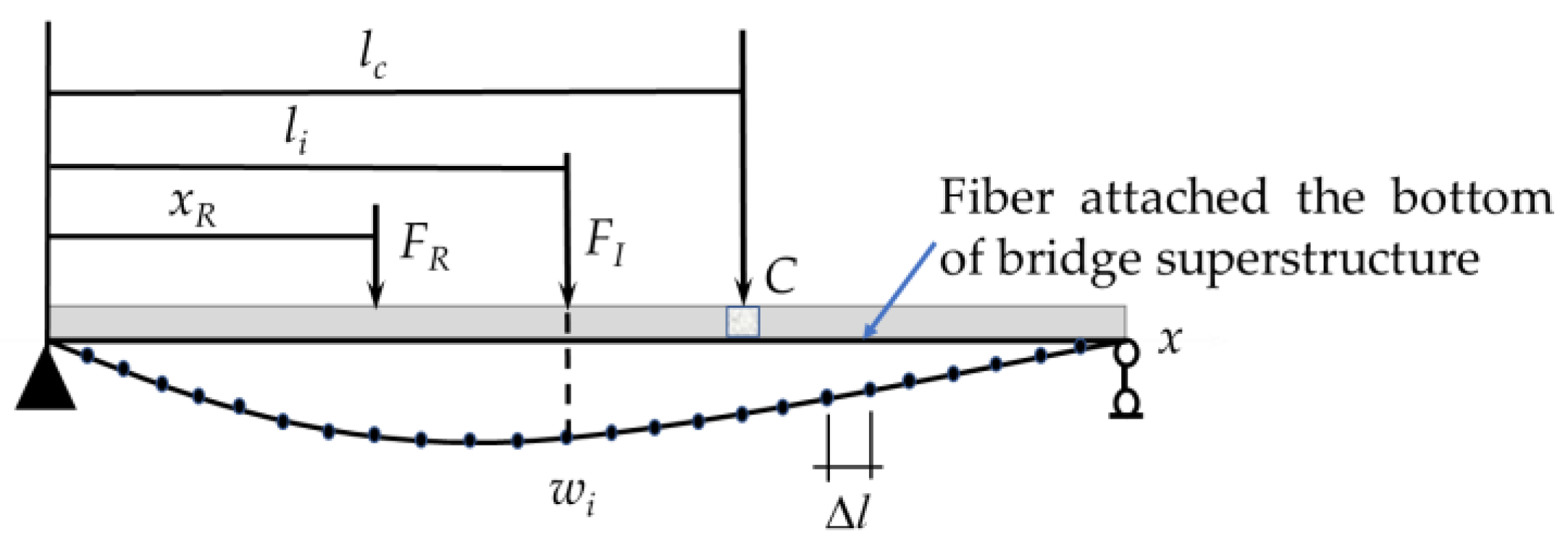
2.1.1. Generating the Quasi-Static Strain ILs of Bridges
2.1.2. Acquiring Measurements of Bridge Strain Using the BOTDA Technique
2.1.3. Mitigating the Effects of Measurement Noise on the Quasi-Static Strain ILs of Bridges
2.2. Localizing Damage Using Quasi-Static Strain ILs Based on the BOTDA Technique
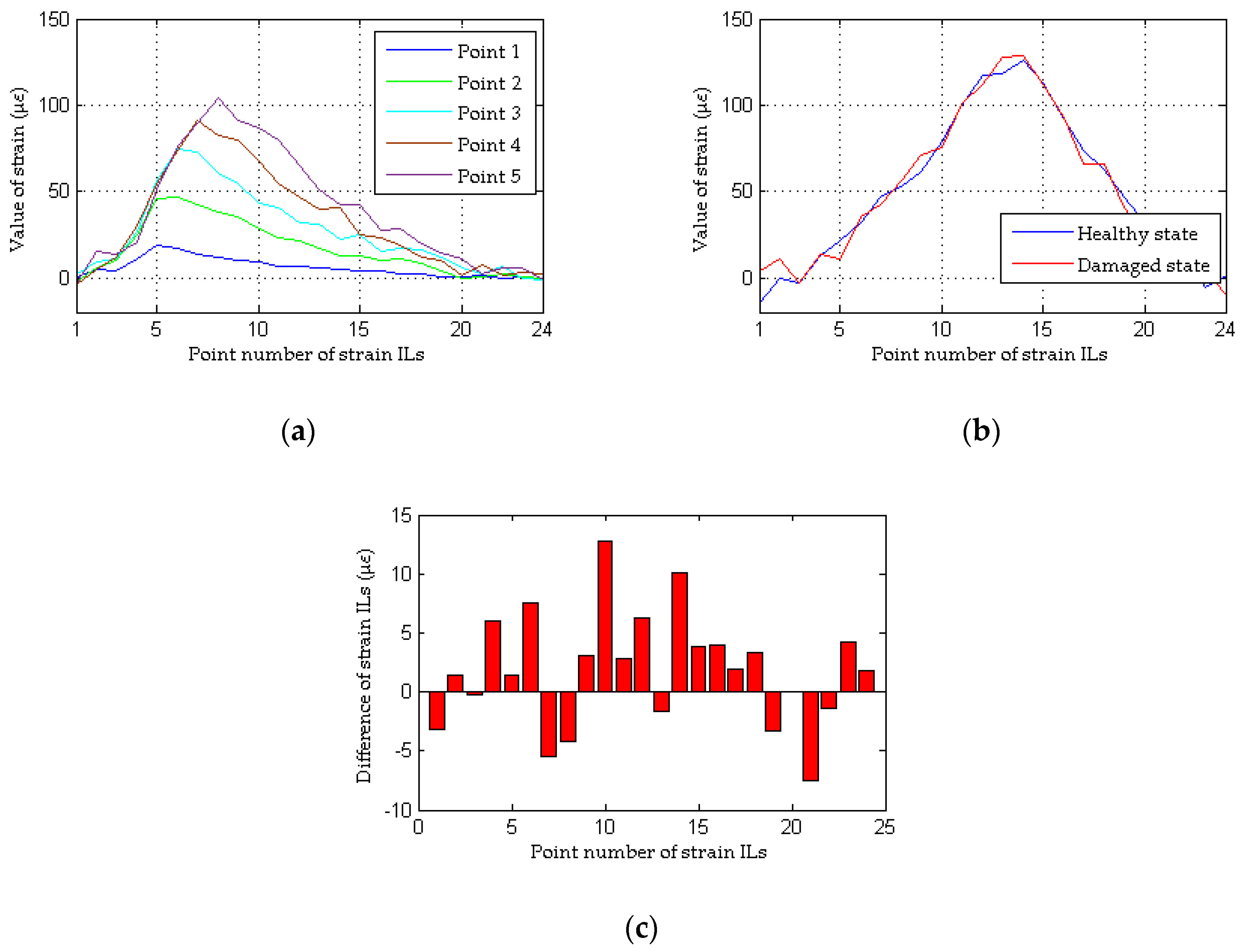
2.2.1. Damage Features Based on Quasi-Static Strain ILs
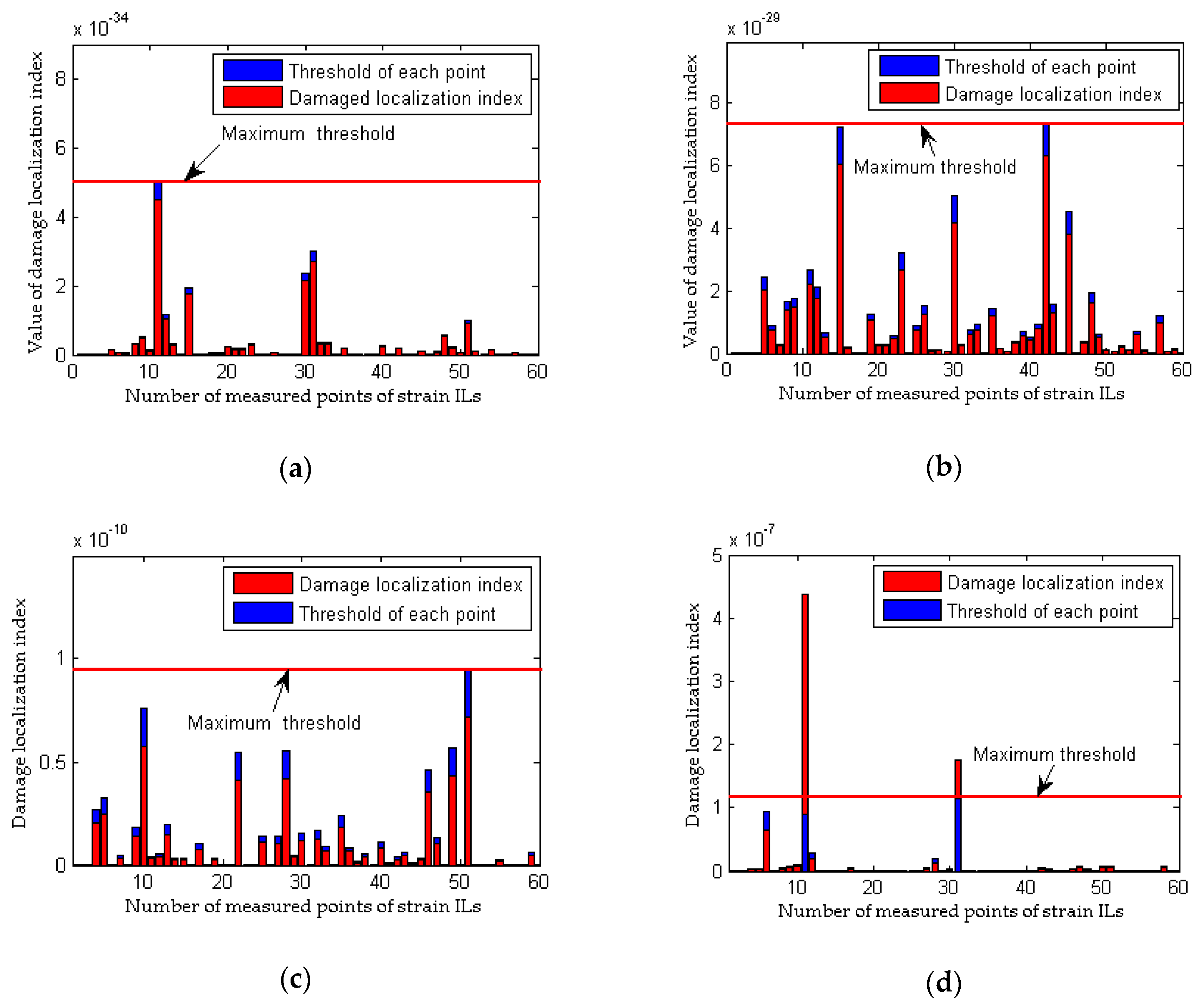
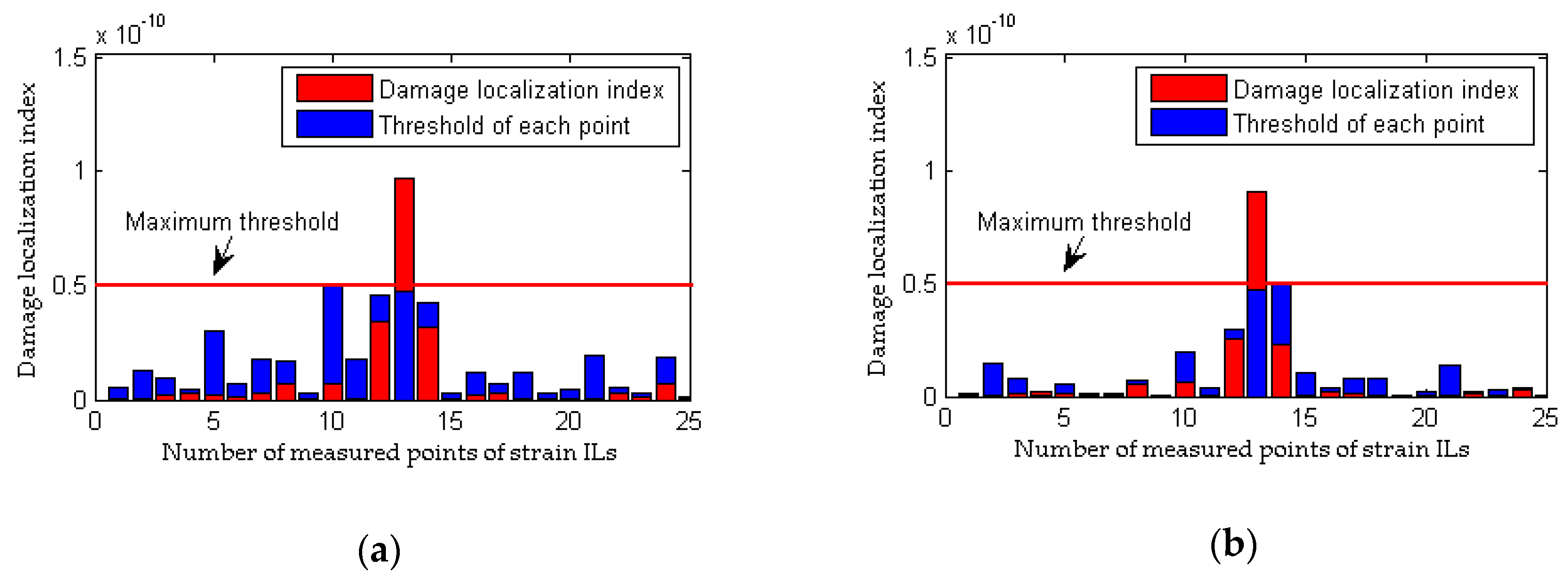
2.2.2. Damage Localization Index and Threshold for the Determination of Damage
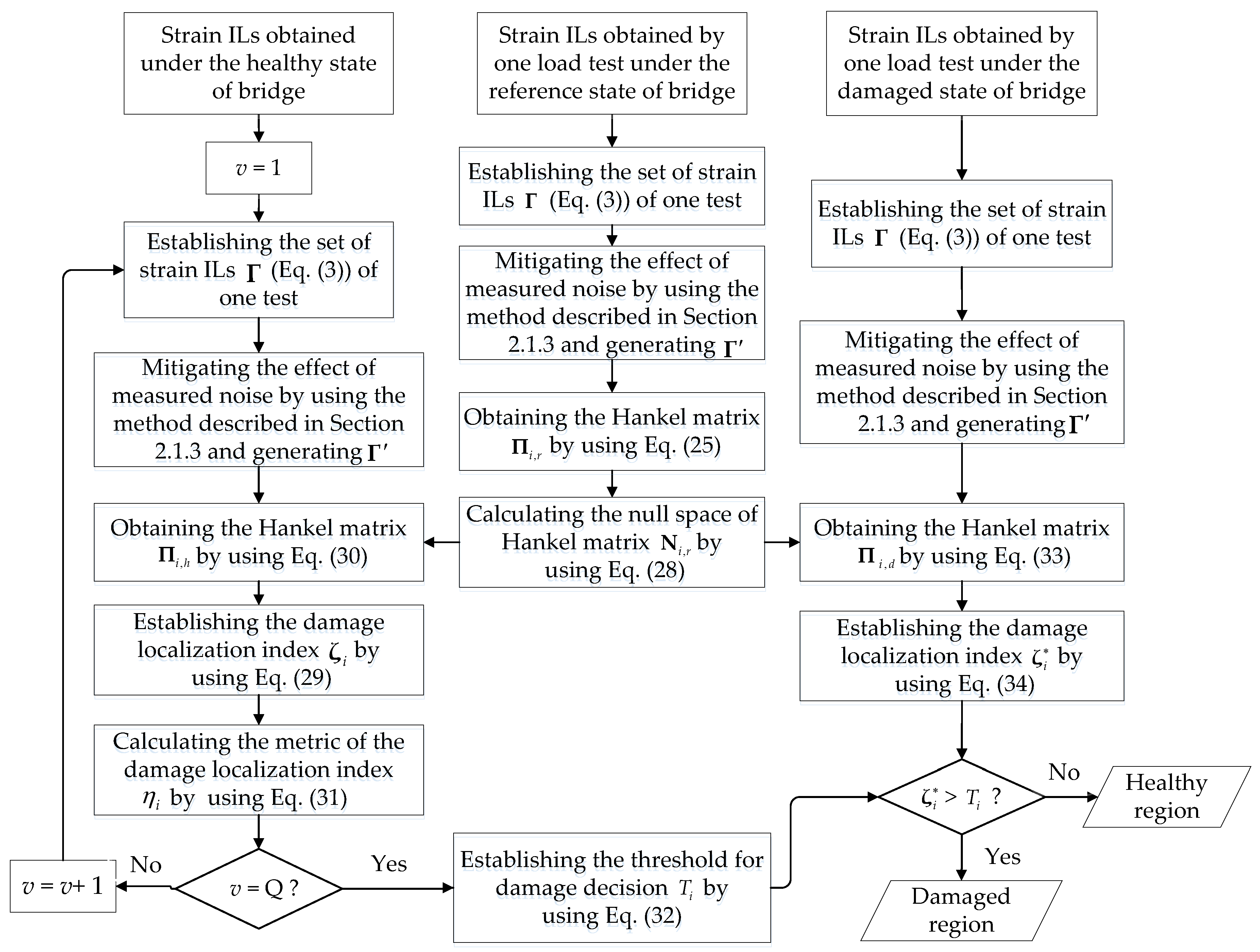
2.3. Procedure of the Proposed Method
3. Demonstration of the Effectiveness of the Proposed Method Using a Numerical Bridge Model
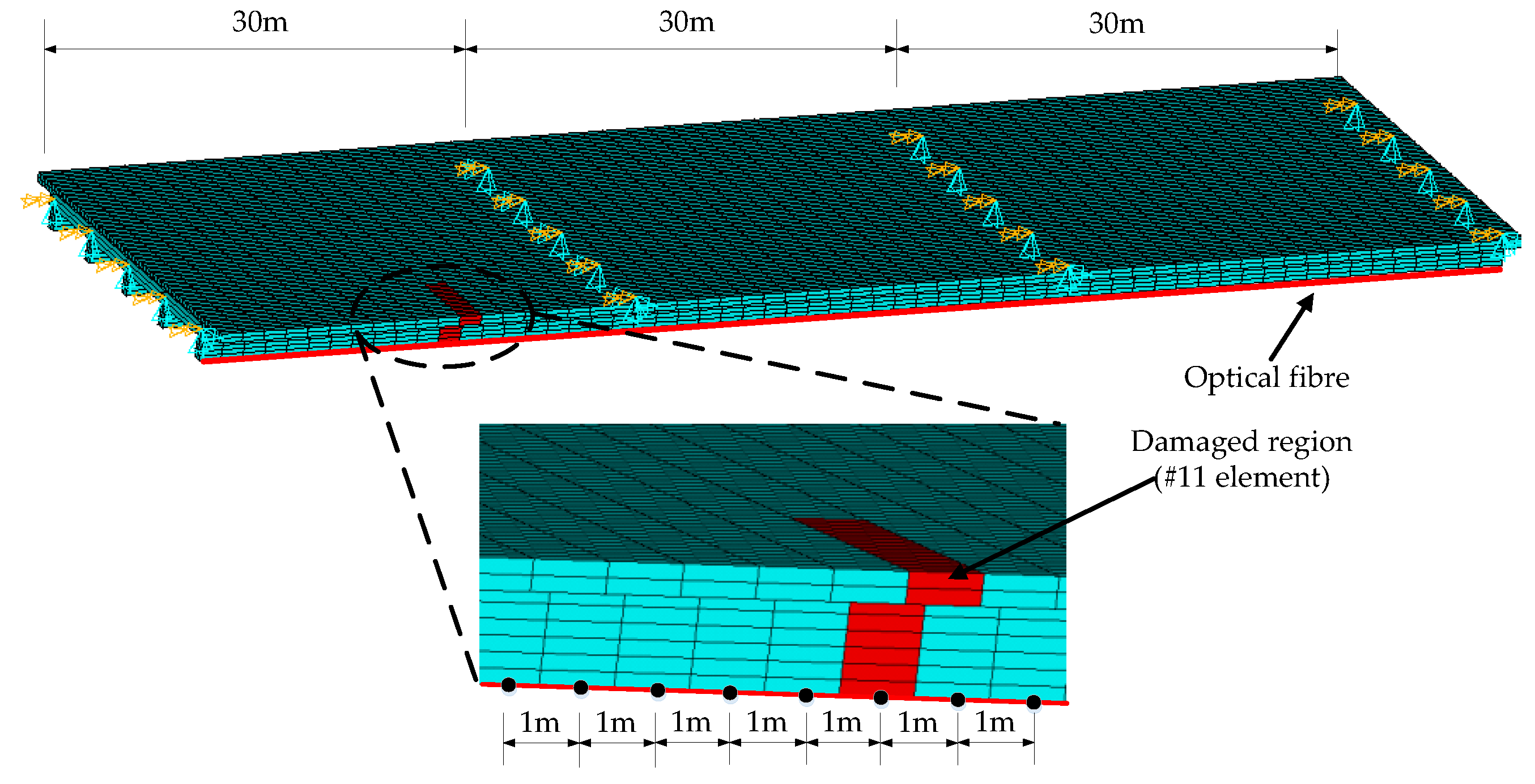
3.1. Description of the Numerical Example
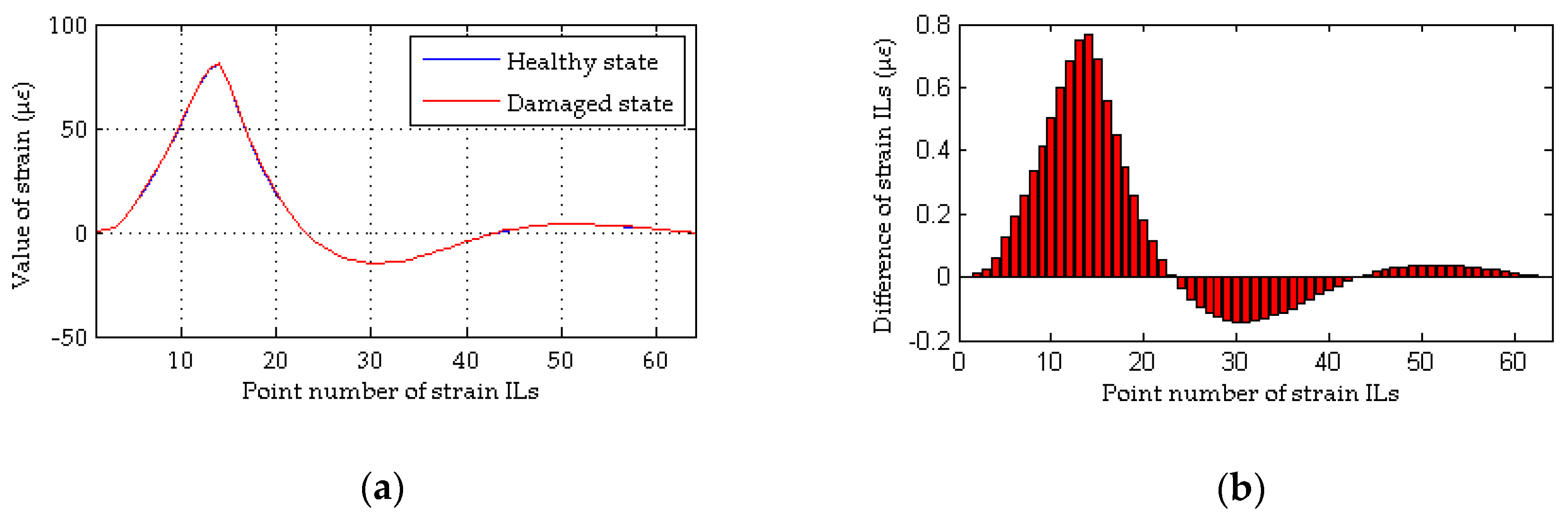
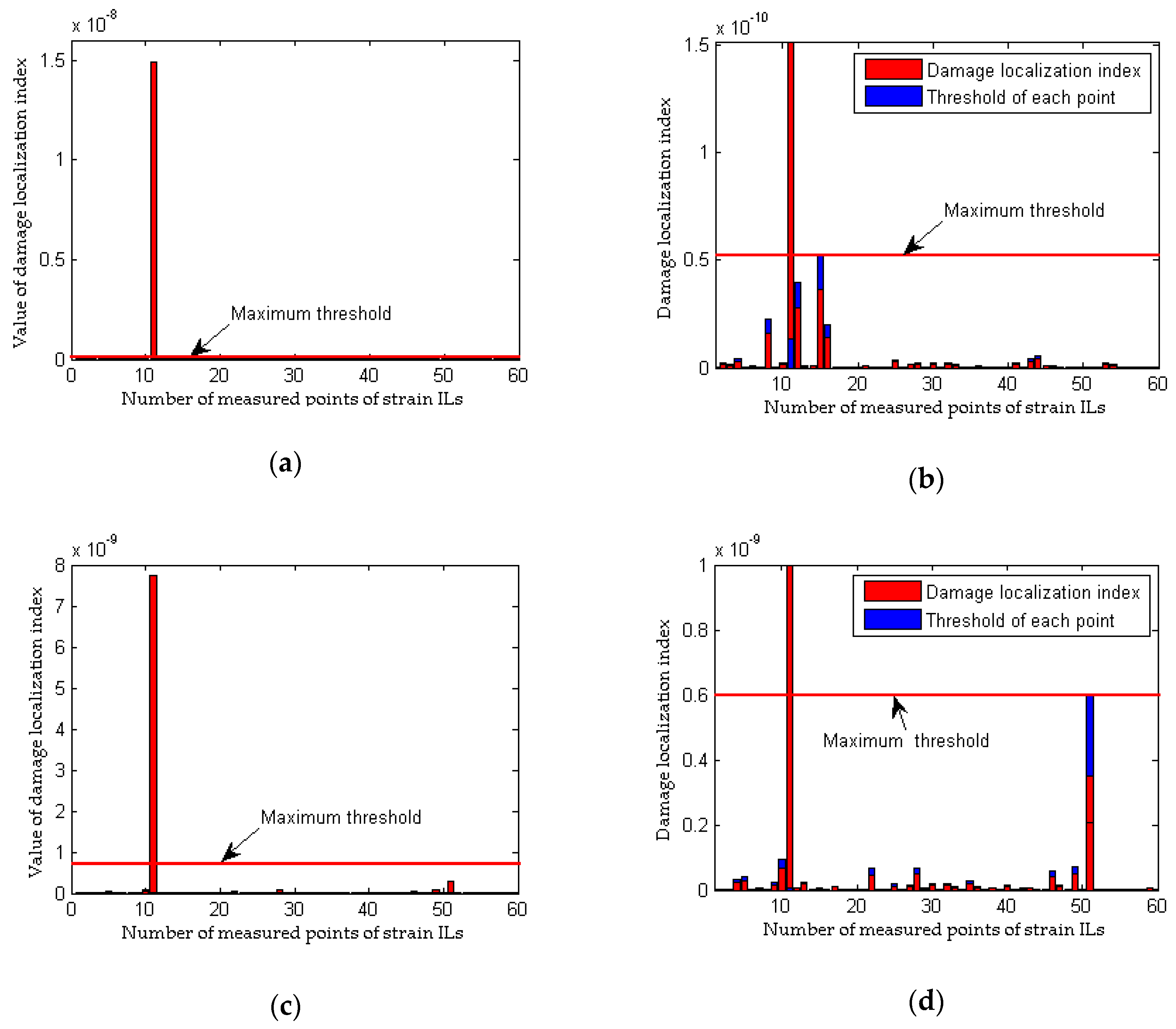
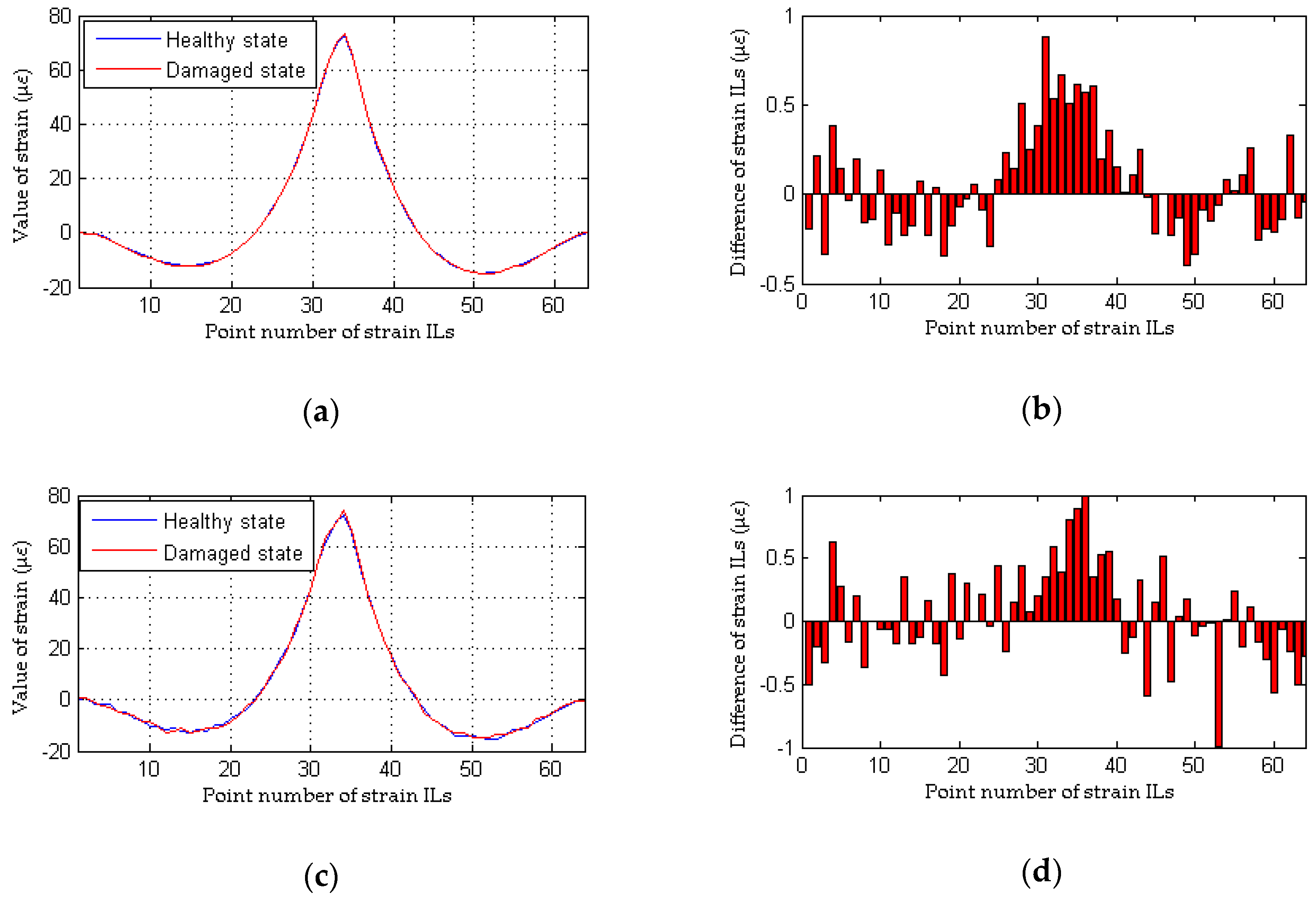
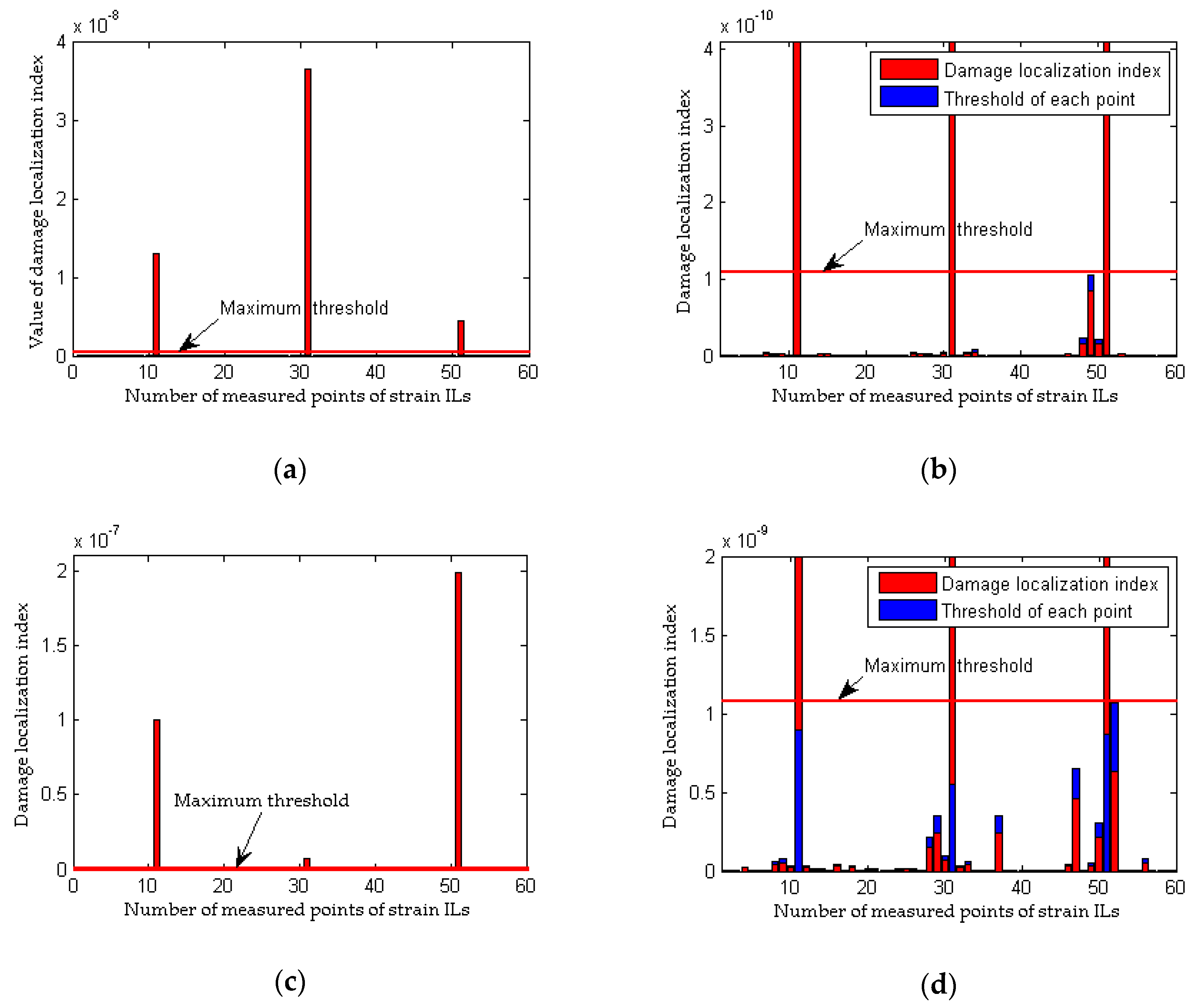
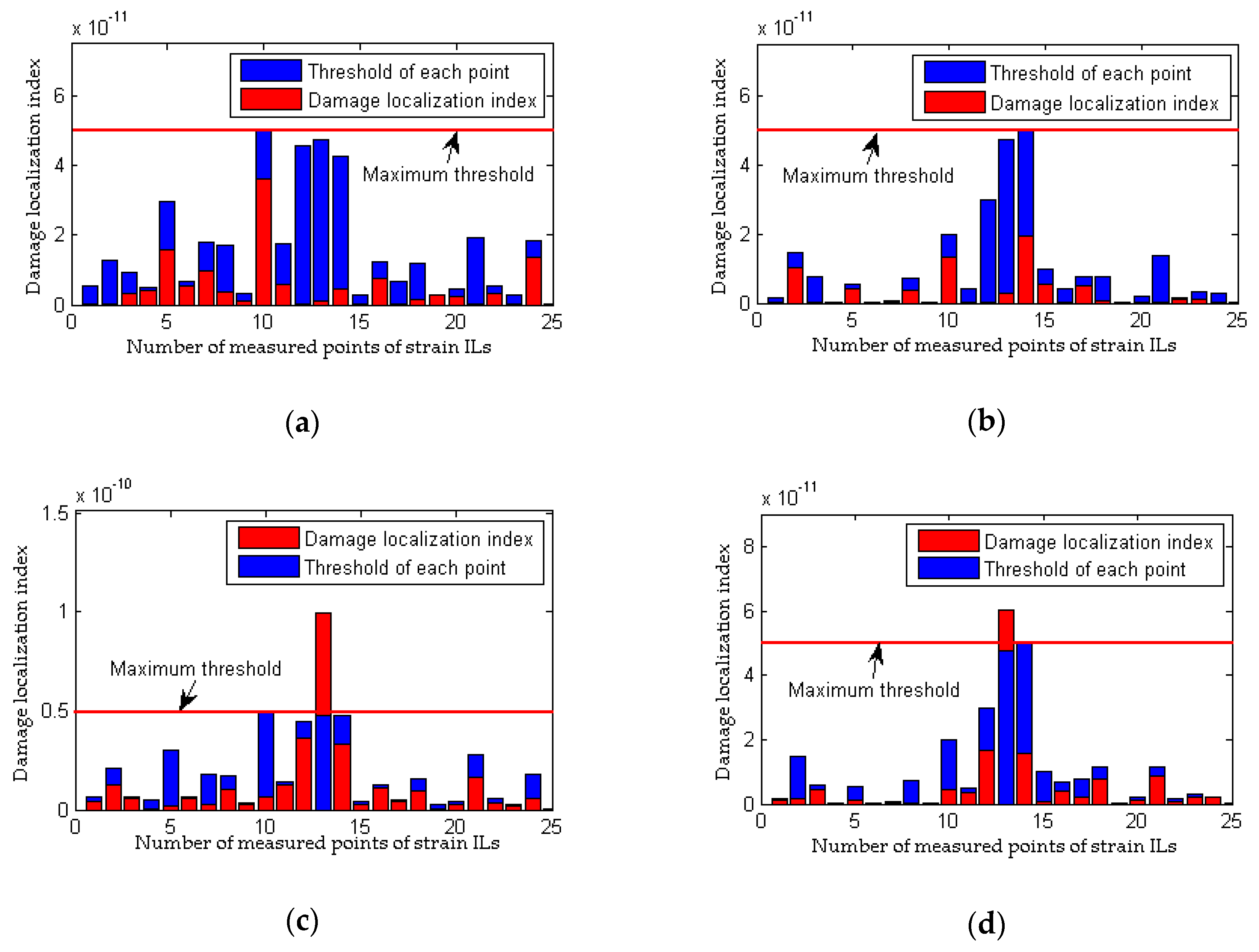
3.2. Damage Localization Performance of the Proposed Method Considering the Effects of Measurement Noise
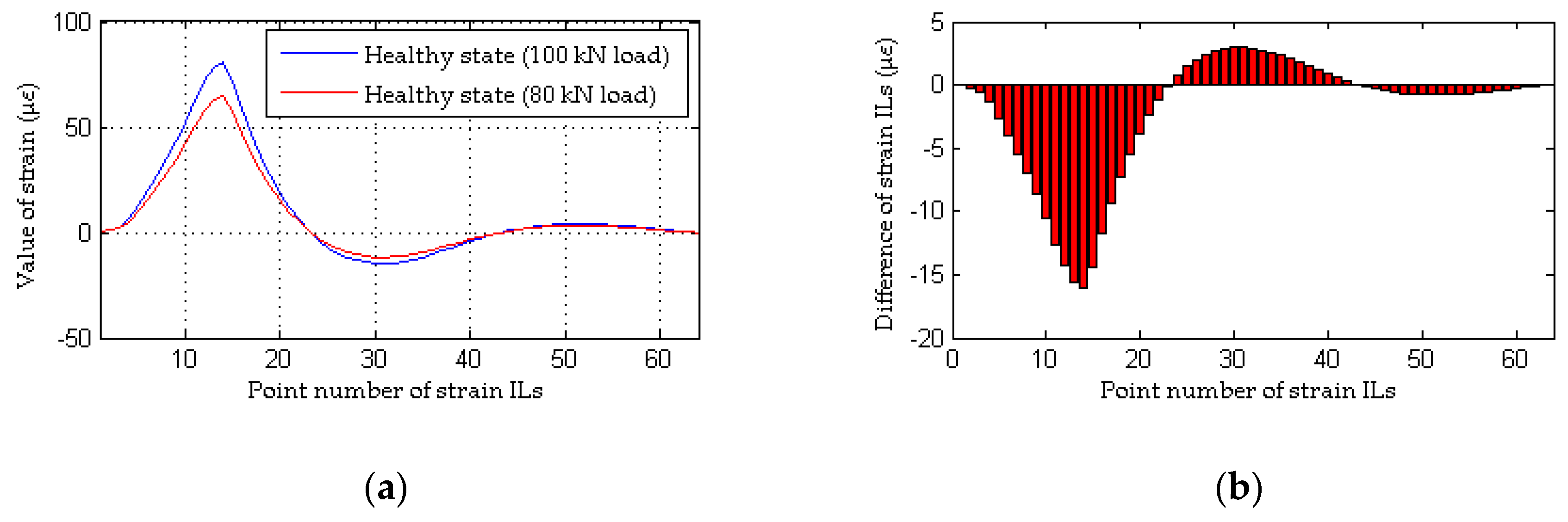
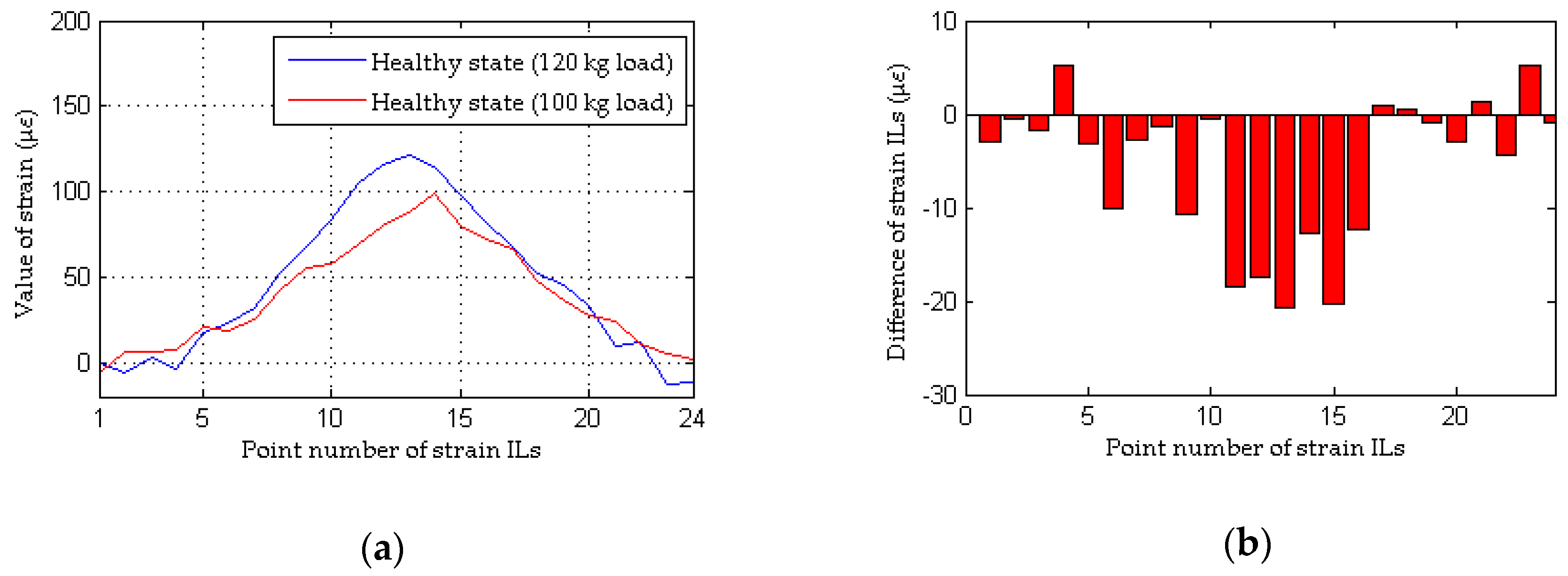
3.3. Damage Localization Performance of the Proposed Method Considering the Effects of Loading Conditions
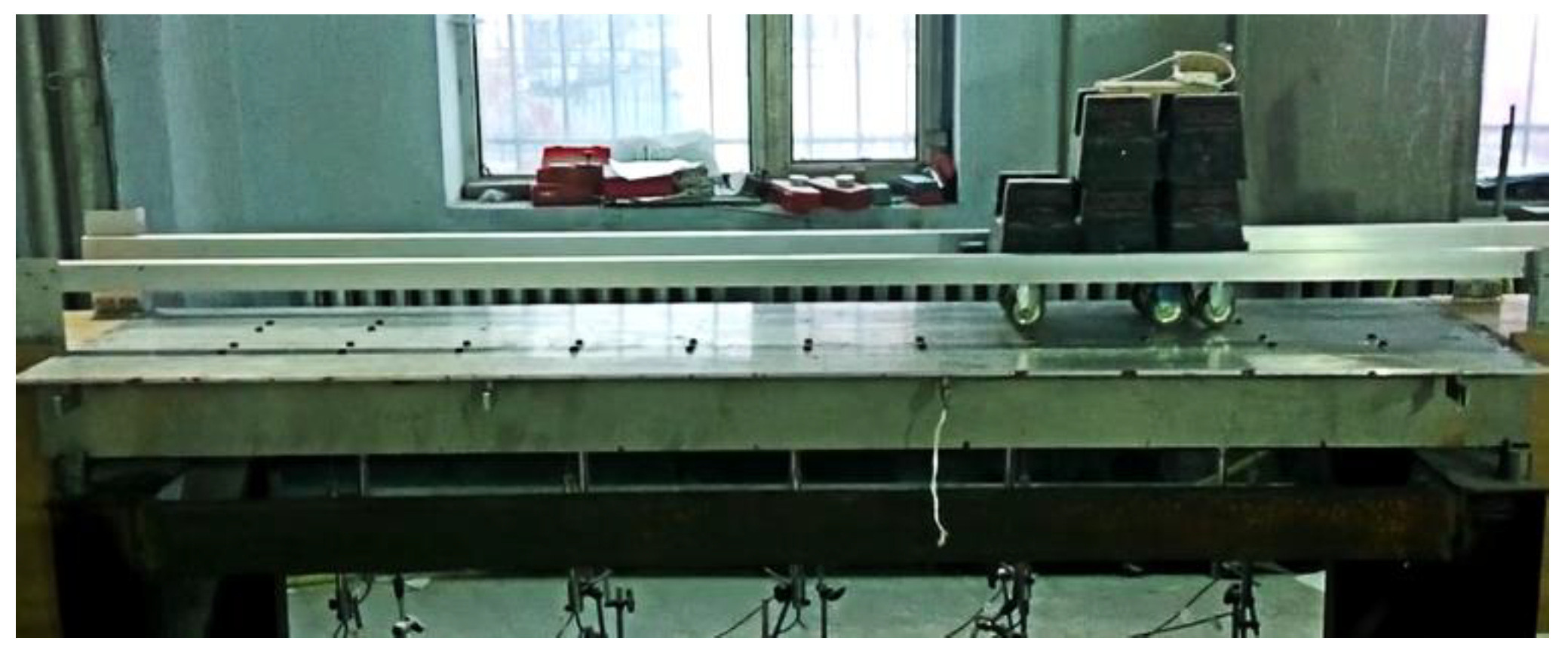
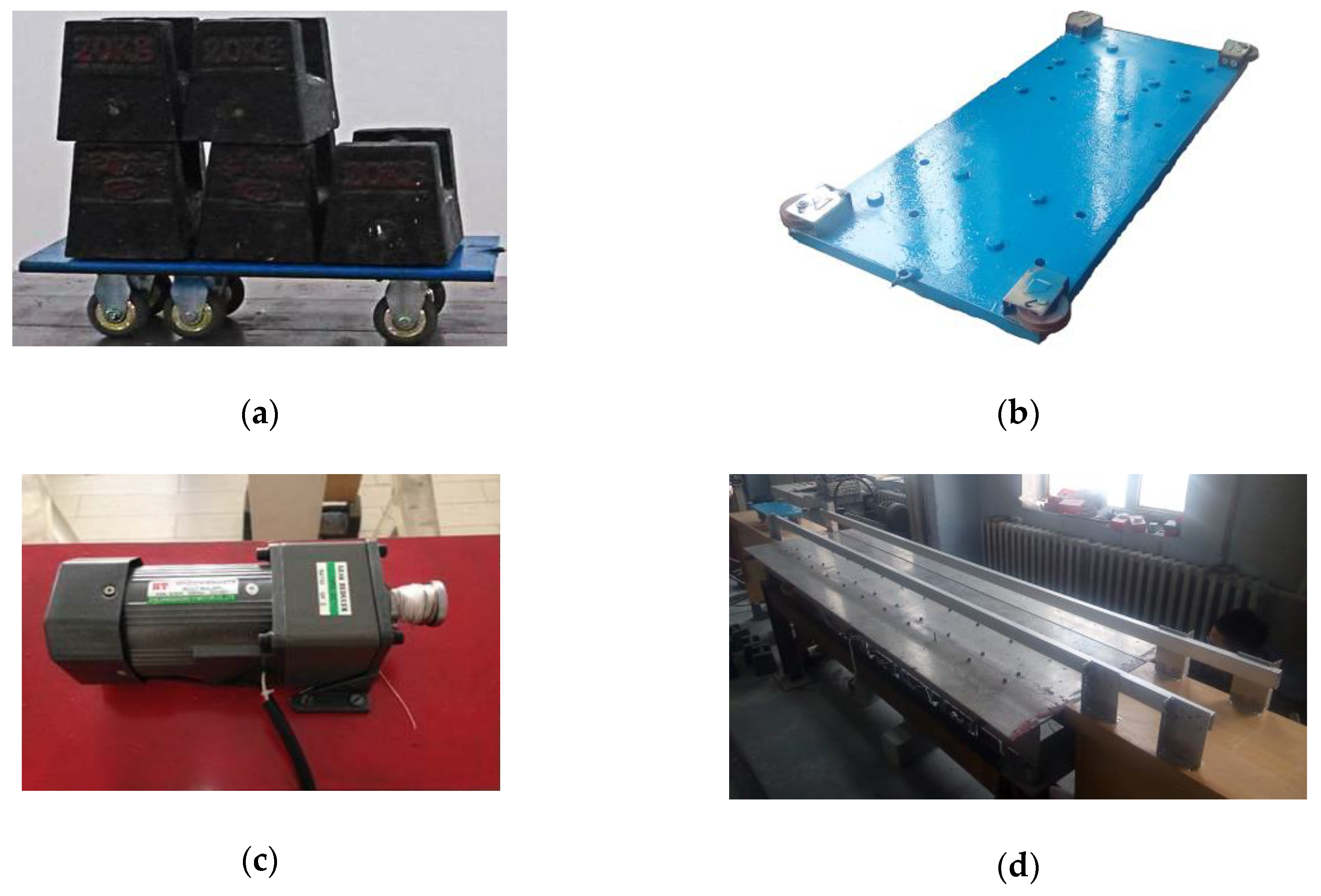
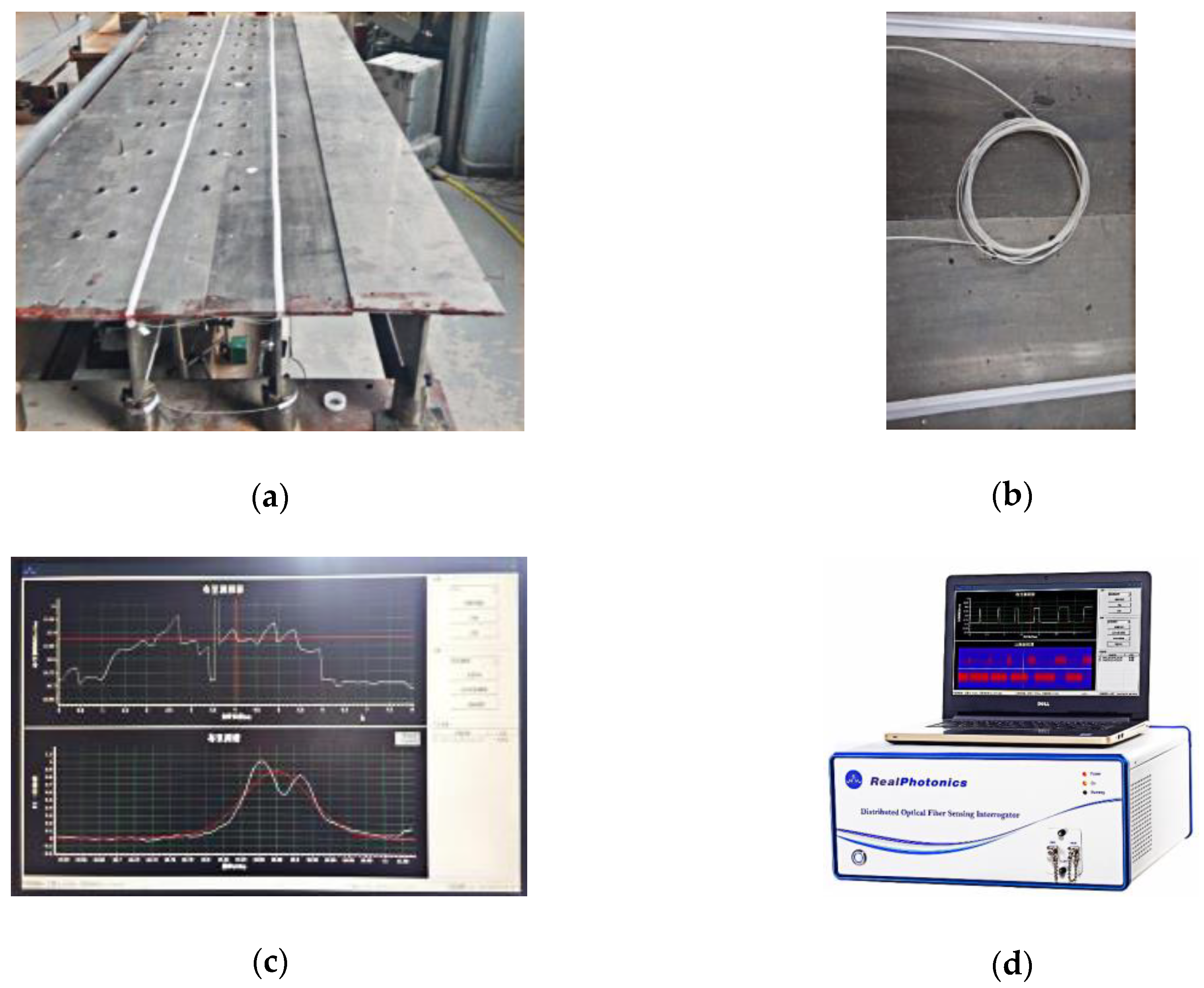
4. Demonstration of the Effectiveness of the Proposed Method Using an Experimental Bridge Model
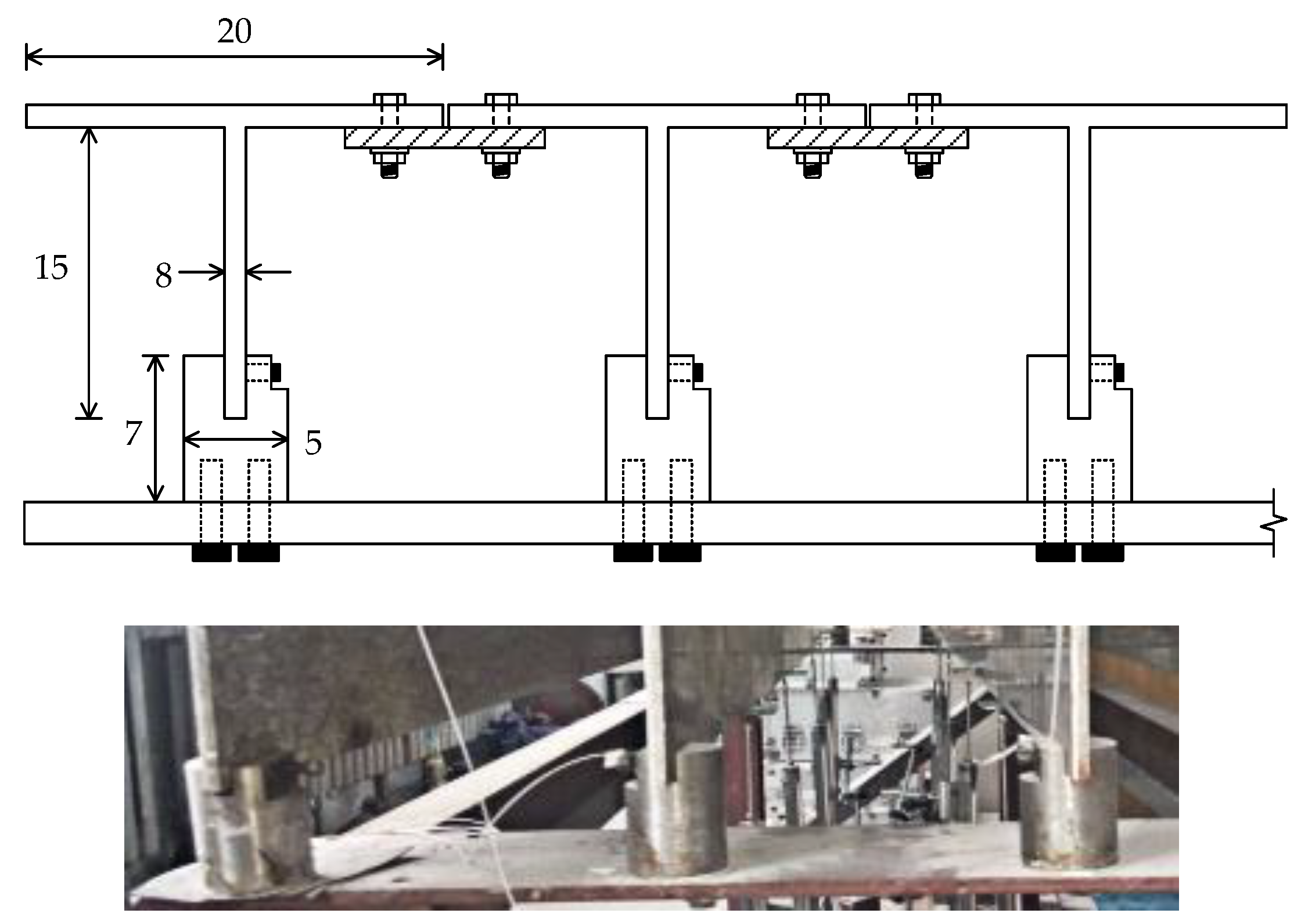
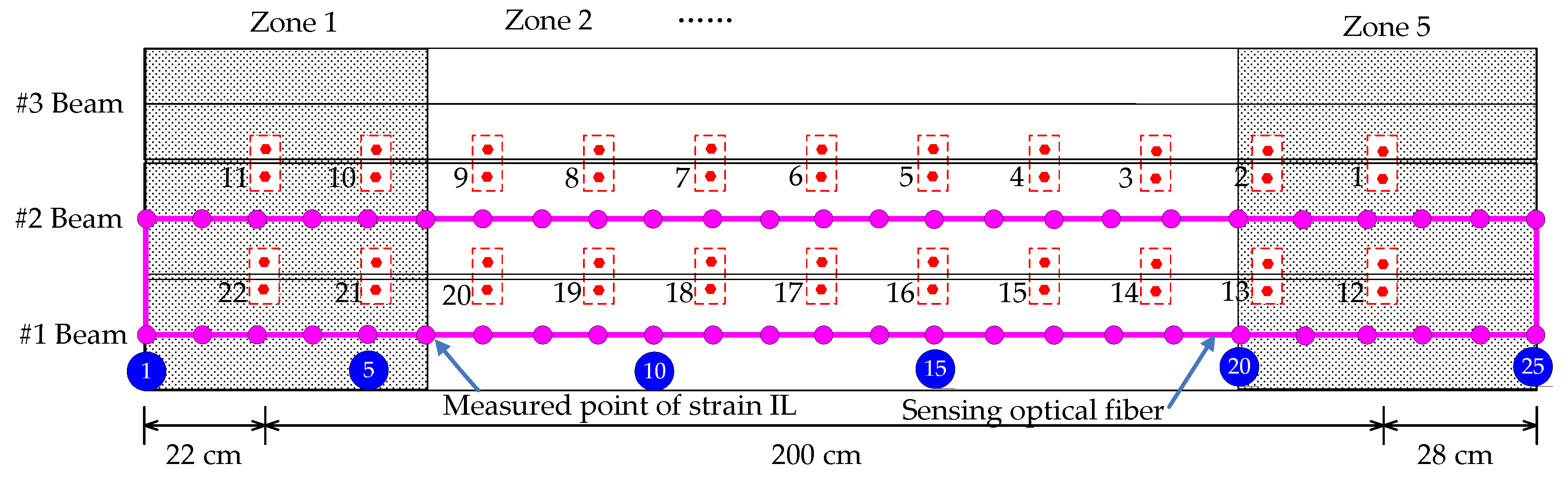
4.1. Description of the Model Bridge
4.2. Introduction of the Placement of the Sensing Optical Fiber
4.3. Performance Comparison Between the Proposed Method and the Traditional Approach
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sazonov, E.; Klinkhachorn, P. Optimal spatial sampling interval for damage detection by curvature or strain energy mode shapes. J. Sound Vib. 2005, 285, 783–801. [Google Scholar] [CrossRef]
- Yao, Y.; Glisic, B. Detection of steel fatigue cracks with strain sensing sheets based on large area electronics. Sensors 2015, 15, 8088–8108. [Google Scholar] [CrossRef] [PubMed]
- Hendriks, G.A.G.M.; Chen, C.; Hansen, H.H.G.; Korte, C.L. Quasi-static elastography and ultrasound plane-wave imaging: The effect of beam-forming strategies on the accuracy of displacement estimations. Appl. Sci. 2018, 8, 319. [Google Scholar] [CrossRef]
- Wang, T.; Celik, O.; Catbas, F.N.; Zhang, L.M. A frequency and spatial domain decomposition method for operational strain modal analysis and its application. Eng. Struct. 2016, 114, 104–112. [Google Scholar] [CrossRef]
- Cheng, L.; Cigada, A. Experimental strain modal analysis for beam-like structure by using distributed fibre optics and its damage detection. Meas. Sci. Technol. 2017, 28, 074001. [Google Scholar] [CrossRef]
- Cui, H.; Xu, X.; Peng, W.; Hong, M. A damage detection method based on strain modes for structures under ambient excitation. Measurement 2018, 125, 438–446. [Google Scholar] [CrossRef]
- Shi, Z.Y.; Law, S.S.; Zhang, L.M. Structural damage detection from modal strain energy change. J. Eng. Mech. 2000, 126, 1216–1223. [Google Scholar] [CrossRef]
- Cha, Y.J.; Buyukozturk, O. Structural damage detection using modal strain energy and hybrid multiobjective optimization. Comput. Aided Civ. Infrastruct. Eng. 2015, 30, 347–358. [Google Scholar] [CrossRef]
- Vo-Duy, T.; Ho-Huu, V.; Dang-Trung, H.; Nguyen-Thoi, T. A two-step approach for damage detection in laminated composite structures using modal strain energy method and an improved differential evolution algorithm. Comps. Struct. 2016, 147, 42–53. [Google Scholar] [CrossRef]
- Tan, Z.X.; Thambiratnam, D.P.; Chan, T.H.T.; Abdul Razak, H. Detecting damage in steel beams using modal strain energy based damage index and Artificial Neural Network. Eng. Fail. Anal. 2017, 79, 253–262. [Google Scholar] [CrossRef]
- Xu, Y.L.; Chen, J. Structural damage detection using empirical mode decomposition: Experimental investigation. J. Eng. Mech. 2004, 130, 1279–1288. [Google Scholar] [CrossRef]
- Li, X.Y.; Wang, L.X.; Law, S.S.; Nie, Z.H. Covariance of dynamic strain responses for structural damage detection. Mech. Syst. Signal Process. 2017, 95, 90–105. [Google Scholar] [CrossRef]
- Zhao, H.; Uddin, N.; O’Brien, E.J.; Shao, X.D.; Zhu, P. Identification of vehicular axle weights with a Bridge Weigh-in-Motion system considering transverse distribution of wheel loads. ASCE J. Bridge Eng. 2014, 19, 165–184. [Google Scholar] [CrossRef]
- Wang, X.; Hu, N.; Fukunaga, H.; Yao, Z.H. Structural damage identification using static test data and changes in frequencies. Eng. Struct. 2001, 23, 610–621. [Google Scholar] [CrossRef]
- Abdo, M.A.B. Parametric study of using only static response in structural damage detection. Eng. Struct. 2012, 34, 124–131. [Google Scholar] [CrossRef]
- Yang, Q.W. A new damage identification method based on structural flexibility disassembly. J. Vib. Control 2011, 17, 1000–1008. [Google Scholar] [CrossRef]
- Banan, M.R.; Banan, M.R.; Hjelmstad, K.D. Parameter estimation of structures from static response. I: Computational aspects. J. Struct. Eng. 1994, 120, 3243–3258. [Google Scholar] [CrossRef]
- Zaurin, R.; Catbas, F.N. Integration of computer imaging and sensor data for structural health monitoring of bridges. Smart Mater. Struct. 2009, 19, 015019. [Google Scholar] [CrossRef]
- Grandić, I.Š.; Grandić, D.; Bjelanović, A. Comparison of techniques for damage identification based on influence line approach. Mach. Technol. Mater. 2011, 7, 9–13. [Google Scholar]
- Choi, I.Y.; Lee, J.S.; Choi, E.; Cho, N.H. Development of elastic damage load theorem for damage detection in a statically determinate beam. Comput. Struct. 2004, 82, 2483–2492. [Google Scholar] [CrossRef]
- Wang, C.Y.; Huang, C.K.; Chen, C.S. Damage assessment of beam by a quasi-static moving vehicular load. Adv. Adapt. Data Anal. 2011, 3, 417–445. [Google Scholar] [CrossRef]
- Cavadas, F.; Smith, I.F.C.; Figueiras, J. Damage detection using data-driven methods applied to moving-load responses. Mech. Syst. Signal Process. 2013, 39, 409–425. [Google Scholar] [CrossRef]
- He, W.Y.; Ren, W.X.; Zhu, S. Damage detection of beam structures using quasi-static moving load induced displacement response. Eng. Struct. 2017, 145, 70–82. [Google Scholar] [CrossRef]
- Chen, Z.W.; Zhu, S.; Xu, Y.L.; Li, Q.; Cai, Q.L. Damage detection in long suspension bridges using stress influence lines. J. Bridge Eng. 2014, 20, 05014013. [Google Scholar] [CrossRef]
- He, W.Y.; Ren, W.X.; Zhu, S. Baseline-free damage localization method for statically determinate beam structures using dual-type response induced by quasi-static moving load. J. Sound Vib. 2017, 400, 58–70. [Google Scholar] [CrossRef]
- Wu, B.; Wu, G.; Yang, C.; He, Y. Damage identification method for continuous girder bridges based on spatially-distributed long-gauge strain sensing under moving loads. Mech. Syst. Signal Process. 2018, 104, 415–435. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Q.; Ansari, F.; Mendez, A. Serial multiplexing of optical fibres for sensing of structural strains. J. Struct. Control 2000, 7, 103–117. [Google Scholar] [CrossRef]
- Bao, X.; DeMerchant, M.; Brown, A.; Bremner, T. Tensile and compressive strain measurement in the lab and field with the distributed Brillouin scattering sensor. J. Lightw. Technol. 2001, 19, 1698–1704. [Google Scholar]
- Bao, X. Optical fibre sensors based on Brillouin scattering. Opt. Photonic News 2009, 20, 40–46. [Google Scholar] [CrossRef]
- Dong, Y.; Zhang, H.; Lu, Z.; Chen, L.; Bao, X. Long-range and high-spatial-resolution distributed birefringence measurement of a polarization-maintaining fibre based on Brillouin dynamic grating. J. Lightw. Technol. 2013, 31, 2981–2986. [Google Scholar] [CrossRef]
- Dong, Y.; Zhang, H.; Chen, L.; Bao, X. 2-cm-spatial-resolution and 2-km-range Brillouin optical fibre sensor using a transient differential pulse pair. Appl. Opt. 2012, 51, 1229–1235. [Google Scholar] [CrossRef] [PubMed]
- Glisic, B.; Inaudi, D. Development of method for in-service crack detection based on distributed fibre optic sensors. Struct. Health Monit. 2012, 11, 161–171. [Google Scholar] [CrossRef]
- Motamedi, M.H.; Feng, X.; Zhang, X.; Sun, C.; Ansari, F. Quantitative investigation in distributed sensing of structural defects with Brillouin optical time domain reflectometry. J. Intell. Mater. Syst. Struct. 2013, 24, 1187–1196. [Google Scholar] [CrossRef]
- Shi, B.; Xu, H.; Chen, B.; Zhang, D.; Ding, Y.; Cui, H.; Gao, J. A feasibility study on the application of fibre-optic distributed sensors for strain measurement in the Taiwan Strait Tunnel project. Mar. Georesour. Geotechnol. 2003, 21, 333–343. [Google Scholar] [CrossRef]
- Soman, R.; Malinowski, P.; Majewska, K.; Mieloszyk, M.; Ostachowicz, W. Kalman filter based neutral axis tracking in composites under varying temperature conditions. Mech. Syst. Signal Process. 2018, 110, 485–498. [Google Scholar] [CrossRef]
- Soman, R.; Kyriakides, M.; Onoufriou, T.; Ostachowicz, W. Numerical evaluation of multi-metric data fusion based structural health monitoring of long span bridge structures. Struct. Infrastruct. Eng. 2018, 14, 673–684. [Google Scholar] [CrossRef]
- Horiguchi, T.; Shimizu, K.; Kurashima, T.; Tateda, M.; Koyamada, Y. Development of a distributed sensing technique using Brillouin scattering. J. Lightw. Technol. 1995, 13, 1296–1302. [Google Scholar] [CrossRef]
- Johnstone, I.M.; Lu, A.Y. On consistency and sparsity for principal components analysis in high dimensions. J. Am. Stat. Assoc. 2009, 104, 682–693. [Google Scholar] [CrossRef]
- Yan, A.M.; Golinval, J.C. Null subspace-based damage detection of structures using vibration measurements. Mech. Syst. Signal Process. 2006, 20, 611–626. [Google Scholar] [CrossRef]
- Bernal, D. Damage localization from the null space of changes in the transfer matrix. AIAA J. 2007, 45, 374–381. [Google Scholar] [CrossRef]
- Döhler, M.; Mevel, L.; Hille, F. Subspace-based damage detection under changes in the ambient excitation statistics. Mech. Syst. Signal Process. 2014, 45, 207–224. [Google Scholar] [CrossRef]
- Li, W.; Bao, X.; Li, Y.; Chen, L. Differential pulse-width pair BOTDA for high spatial resolution sensing. Opt. Express 2008, 16, 21616–21625. [Google Scholar] [CrossRef] [PubMed]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case Number | Description of Case | Case Number | Description of Case |
|---|---|---|---|
| Case 1 | Healthy bridge (100 kN quasi-static moving load) | Case 6 | #11, #31 and #51 damaged elements with 0.5% noise |
| Case 2 | #11 damaged element 1 without noise | Case 7 | #11, #31 and #51 damaged elements with 2.0% noise |
| Case 3 | #11 damaged element with 0.5% noise | Case 8 | Healthy bridge (80 kN quasi-static moving load) |
| Case 4 | #11 damaged element with 2.0% noise | Case 9 | #11 and #31 damaged elements with 2.5% noise (80 kN quasi-static moving load) |
| Case 5 | #11, #31 and #51 damaged elements without noise |
| Case Number | Description of Case | Case Number | Description of Case |
|---|---|---|---|
| Experimental case 1 | Healthy bridge (120 kg moving load) | Experimental case 3 | Healthy bridge (100 kg moving load) |
| Experimental case 2 | Removing the #17 transverse connection (120 kg moving load) | Experimental case 4 | Removing the #17 transverse connection (100 kg moving load) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhang, S. Damage Localization of Beam Bridges Using Quasi-Static Strain Influence Lines Based on the BOTDA Technique. Sensors 2018, 18, 4446. https://doi.org/10.3390/s18124446
Liu Y, Zhang S. Damage Localization of Beam Bridges Using Quasi-Static Strain Influence Lines Based on the BOTDA Technique. Sensors. 2018; 18(12):4446. https://doi.org/10.3390/s18124446
Chicago/Turabian StyleLiu, Yang, and Shaoyi Zhang. 2018. "Damage Localization of Beam Bridges Using Quasi-Static Strain Influence Lines Based on the BOTDA Technique" Sensors 18, no. 12: 4446. https://doi.org/10.3390/s18124446
APA StyleLiu, Y., & Zhang, S. (2018). Damage Localization of Beam Bridges Using Quasi-Static Strain Influence Lines Based on the BOTDA Technique. Sensors, 18(12), 4446. https://doi.org/10.3390/s18124446