1. Introduction
The automotive industry and the information technology (IT) industry are joining forces towards connected and autonomous vehicles that offer a multitude of benefits, such as driving safety, traffic flow efficiency, driver comfort, and new infotainment experiences for passengers. Along with sensors and computing intelligence, a key component in the development is the vehicle-to-everything (V2X) communication, which allows a vehicle to communicate with not only other vehicles and road-side equipment, but also nearby pedestrians and the Internet. Among the prospective applications of connected and autonomous vehicles, the most crucial one that strongly drives the V2X technology evolution is the safety. Analyses by the U.S. Department of Transportation’s National Highway Traffic Safety Administration (NHTSA) show that V2X communication can address up to 80 percent of the crash scenarios involving non-impaired drivers [
1].
In vehicular safety communication, the periodic exchange of Basic Safety Messages (BSMs) containing such information as position, speed, acceleration, and heading among others [
2], is indispensable for reducing the collision risk by facilitating the tracking and short-term prediction [
2] of neighboring vehicles’ kinematics. It immediately enables driving safety applications such as Forward Collision Warning (FCW) [
3]. For long, the Dedicated Short-Range Communication (DSRC) based on the IEEE 802.11 Outside-the-Context-of-BSS (OCB) mode [
4] has been the sole candidate lower layer technology for the vehicular communication. Both the IEEE WAVE framework in the U.S. [
5,
6,
7] and the Intelligent Transport Systems (ITS) G5 framework in the Europe [
8] build on the DSRC radio.
Recently, however, the V2X communication using the cellular communication infrastructure is emerging as a strong contender of the DSRC-based communication. Although some argue that cellular V2X (C-V2X) is not as ready, has compatibility problems between different 3GPP Releases, and has exaggerated coverage when measured in reality [
9], proponents of the C-V2X argue that the cellular alternative has multiple advantages over DSRC [
10,
11,
12,
13]. Although DSRC is a mature technology and does not require a coordinating network infrastructure or bulky signaling procedures, it has weaknesses in the spectral efficiency [
14] and the capability to deal with congestion and hidden terminal problem at scale [
15]. Typically, C-V2X is considered superior to DSRC in these aspects: longer range [
16,
17] and enhanced reliability, more consistent performance under traffic congestions, clear evolution path towards 5G for emerging applications [
14], and better coexistence with other technologies. On the other hand, the higher packet reception performance of C-V2X over DSRC is highly affected by the modulation and channel coding scheme (MCS) [
18], and the capacity can be lower than DSRC under very high vehicle density and short distances [
16]. Therefore, C-V2X must be less reliant on the cellular infrastructure for efficiency, by leveraging the sidelink communication in particular.
Cellular V2X communications have already been standardized by the 3rd Generation Partnership Project (3GPP), in Release 14 [
19]. It is focused on the communications for basic safety use cases. In particular, the sidelink (SL) device-to-device (D2D) communications through the PC5 interface as a key enabling technology. There are two modes, Mode 3 and Mode 4, that were designed for direct V2X communication. The difference between the two modes is in the radio resource allocation method. Resources are allocated by the cellular network under mode 3. Mode 4 does not require cellular coverage, and vehicular user equipment (UEs) autonomously select their radio resources using a distributed scheduling scheme with a message collision resolution mechanism. Mode 4 is considered the baseline mode and represents an alternative to DSRC.
C-V2X lacks the contention resolution mechanism like that of the IEEE 802.11 in the DSRC communication. Therefore, if two UEs happen to choose the same time-frequency resource for BSM transmission, collision cannot be avoided. Moreover, it cannot be detected by either party. Worse yet, the sidelink Mode 4 uses Semi-Persistent Scheduling (SPS), the collision episode can persist across multiple messaging intervals without the colliding UEs knowing it. Furthermore, vehicles may choose one of a few standardized messaging intervals (e.g., 10 Hz, 20 Hz, or 50 Hz [
20]), raising the possibility of the UEs with the same messaging interval facing the repeated message collision risk. This is one of the reasons that the scheduling is not persistent, but semi-persistent. Each “streak” of periodic message transmissions has an average duration of one second, after which a UE moves to other resource with some probability for the next streak [
21]. This resource reselection will part the unknowingly colliding UEs. Another reason for the SPS is the topology change. When new vehicles join the group of vehicles that are coordinating the resource use through the sensing-based SPS, a newly joining vehicle may have been using the same time-frequency resource that another vehicle from the existing group uses. In this case, the same sustained message collisions can ensue.
Although the current standard has the aforementioned message collision resolution mechanism, we observe that it has not been engineered to its maximum potential to meet the message delivery probability for safety communications. Especially when we envision a high-reliability C-V2X communication for future applications such as remote driving and autonomous driving, we need a very tight resource coordination and control among vehicular UEs. In this paper, we show that by sharing the information regarding their resource reselection to neighboring UEs, each UEs can mutually lower the message collision probability. Specifically, we propose the vehicles broadcast in their safety beacons their planned resource reselection earlier than their actual reselection instance. We show through simulation that the proposed algorithm far exceeds the packet delivery ratio (PDR) performance in various situations. We also discuss what changes should be made in the current standard to carry the planned reselection information. In particular, we discuss how the SCI Format 1 should be modified for better message collision resolution.
In this paper, we limit ourselves to the study of the algorithmic aspect of the message collision resolution mechanism in the sensing-based SPS algorithm. Other aspects such as the physical channel models and their impacts to the algorithm are deferred to a future work. Also, note that the message collision resolution itself is not a congestion control mechanism, but it is directly related with the congestion control in C-V2X. When congestion becomes severe, message collisions will become more likely, and an efficient collision resolution algorithm will mitigate the undesirable impact of the high congestion level on the packet delivery performance. However, devising a fully-fledged congestion control algorithm using one or more standard-provided means such as power control, MCS control, retransmission control, or packet dropping, is beyond the scope of this paper.
The rest of the paper is organized as follows. In
Section 2, we summarize the works that compare C-V2X with the incumbent IEEE 802.11p DSRC/C-ITS. Then we discuss recent related work on radio resource management, network-controlled and autonomous, where our work falls in the second category. In
Section 3, we describe the sensing-based SPS algorithm and its collision resolution mechanism employed in the current standard specification. In
Section 4, we discuss the proposed scheduling algorithm. In
Section 5, we perform simulation experiments to compare the current SPS and the proposed algorithm, showing the performance gap we can obtain through the proposal. In
Section 6, we conclude the paper with the summary of our work and the list of future work items.
2. Related Work
Within the context of C-V2X, radio resource management is an actively studied topic. Recent works in this topic are classified into network-controlled and autonomous approaches. For the former, Sun et al. [
22] transformed the latency and reliability constraints of C-V2X into optimization constraints that are computable using only the slowing varying channel state information. They also formulated a problem to optimize the performance of both vehicular UEs and cellular UEs, and proposed an algorithm to solve it. Abanto-Leon et al. [
23] considered the resource allocation problem under Mode 3. When there is conflict in the allocation between two overlapping groups of vehicles as in an intersection or merging highways, some vehicles cannot receive each other’s information. They designed algorithms with different complexity and performance to solve the problem. Zhang et al. [
24] considered the problem of reusing the same resource block to maximize the number of concurrent V2V communications. Under eNodeB’s control, the proposed algorithm can improve the spectrum efficiency, so that LTE can support a high density of vehicles. Cecchini et al. [
25] considered a network-controlled resource management based on the vehicle position information. They exploited the concept of minimum reuse distance, at which the same resource can be used by a different transmitter without affecting those receivers that are in the awareness range. They showed that the accuracy of the localization affects the error rate. Fritzsche and Festag [
26] also proposed location-based scheduling, where the base station scheduler can leverage the optimal scheduling distance to maximize the cell throughput via resource reuse among different vehicles. To achieve the objective, they exploited the relations among cell throughput, reliability, and communication range. Kim et al. [
27] proposed a position-based resource allocation scheme that allocates a different frequency and time resources based on vehicle speed, density, direction, and position. They showed that the scheme can improve the packet reception ratio (PRR). Şahin et al. [
28] proposed how to allocate resource for the out-of-coverage vehicles when they enter such area. They assumed that the network infrastructure makes the prediction as to the movements of the vehicles, and accordingly makes the reservation for them. They showed that the prediction accuracy is important for transmission success.
As vehicles can be in locations where there is no infrastructure support, autonoumous resource allocation is an indispensable mechanism. Consequently, works are emerging that attempt to evaluate or improve on the 3GPP C-V2X Mode 4. Bazzi et al. [
29] analyzed through simulation the impact of parameters on its wireless resource allocation performance. They varied five physical-layer (PHY) and three medium-access layer (MAC) parameters and classified them into three groups: those having negligible impact, those affecting the quality of service, and those creating the trade-off relation. In particular, they found that the resource keeping probability creates the trade-off between the PRR and update delay. Wang et al. [
30] analyzed the collision probability and average delay in the SPS under the assumption of perfect PHY performance. They found that a flexible resource block selection enables a trade-off between the delay and the collision probability. Specifically, they found that by letting the UEs choose the closest resource block, the delay in the reselection event can be significantly reduced at the cost of the moderately increased collision probability. He et al. [
31] showed that by separating the control and the corresponding data packets in the time axis and by letting them carry the reservation information for each other, the collisions are significantly reduced. This is the most closely related work with ours, but we notice that to carry the resource reservation in the data packet, a cross-layer cooperation is required between the radio layer and the safety application layer. Our work proposes an enhancement within the currently standardized sensing-based SPS framework. Bonjorn et al. is another closely related work with ours. It evaluated the performance of the SPS as proposed in the 3GPP specification [
32]. To lower the collision probability, the authors proposed a cooperative resource allocation and scheduling solution. In the proposal, each UE informs the others of its resource reselection counter (RC) value and resolve any expected collision by forcibly changing the RC values of the UEs that have the same RC value. By reducing the probability of overlapping the reselection windows of the involved UEs, the authors showed that the average collision rate is significantly lowered. Moreover, they proposed to eliminate the randomness in the parameters such as the probability of retaining the same resource in the next streak, and the RC counter. An important finding in this work is that most collisions prevented by this scheme are caused by newly incoming vehicles to the communication range. A deficiency in this work, however, is that the considered resource use level of 25% is rather low to be considered congestion. Moreover, always reselecting other resource when the RC counter reaches zero could raise the collision probability when the use level is high as we will show in
Section 5.2.2. In this paper, we consider various levels of resource use including the severe congestion situations. Also, we attempt to broadcast more specific information as to the location of the next resource to be used by a UE instead of the RC counter. Molina-Masegosa and Gozalvez [
33] presented a detailed analysis of the performance of LTE-V sidelink Mode 4 and proposes a modification to its distributed scheduling. This work showed that under heavy congestion, the IEEE 802.11p at a high rate transmission [
34] can outperform LTE-V in terms of the PDR. The work noticed the differences in the BSM messages as one source of such poor performance by LTE-V. As a solution to this problem, the authors suggested that no subchannels are reserved for a streak when transmitting the larger and less frequent packets (e.g., 300 bytes). Nabil et al. analyzed the effect of the Mode 4 resource pool configuration and some of the key SPS parameters on the scheduling performance and found that the resource reservation interval (RRI) significantly influences packet data rate performance, whereas the resource keeping probability has little effect in dense vehicular highway scenarios [
35]. The reason is that when the congestion is severe, there remain only a limited amount of available resources. Due to lack of adequate resources, UEs end up choosing the same resources again and this would be equivalent to maintaining the resource reservation without executing the SPS algorithm. The authors showed that that proper configuration of scheduling parameters can significantly improve performance. They concluded that research on congestion control mechanisms is needed to further enhance the SPS performance for many practical use cases. Our work confirms most of their findings, but contrary to this work, we also find that the resource keeping probability parameter has visible effect in a wide range of congestion as we will show in
Section 5.2.2.
3. Resource Scheduling and Collision Resolution in Sidelink Mode 4
The resource reservation in the sidelink Mode 4 works in a distributed manner among UEs, so it provides a distributed mechanism to mitigate message collisions [
19]. Specifically, the 3GPP standards define parameters and possible mechanisms to cope with the channel congestion [
20,
21], which is called the sensing-based SPS. SPS is prescribed by the standards due to the periodic nature and the predictable sizes of the safety messages such as BSM transmitted by a UE. Under the SPS scheme, therefore, a group of resources evenly spaced by the RRI on the time axis are reserved in one signaling exchange. For instance, a UE can be allowed to transmit ten BSMs each spaced 100 ms before another attempt to reserve resources for the next group of BSMs is made. Typical RRI values are 20 ms, 50 ms, and 100 ms, where longer intervals are also allowed. The other type of resource reservation, namely dynamic scheduling, requires signaling for each packet transmission. It has much larger signaling overhead, thus can delay the transmission of the time-critical safety messages.
To determine which single-subframe resource(s) a UE can use, it relies on
sensing the resource use by UEs in the recent past. By allocating the resource using the sensing result, the SPS scheme tries to minimize the message collisions as congestion worsens. However, the sensing-based SPS should not be considered a fully-fledged congestion control algorithm, which would use various available means such as power control, MCS control, retransmission control, or packet drop [
20,
36]. Below, we briefly discuss the sensing-based SPS algorithm as defined in the current standards.
3.1. Sensing
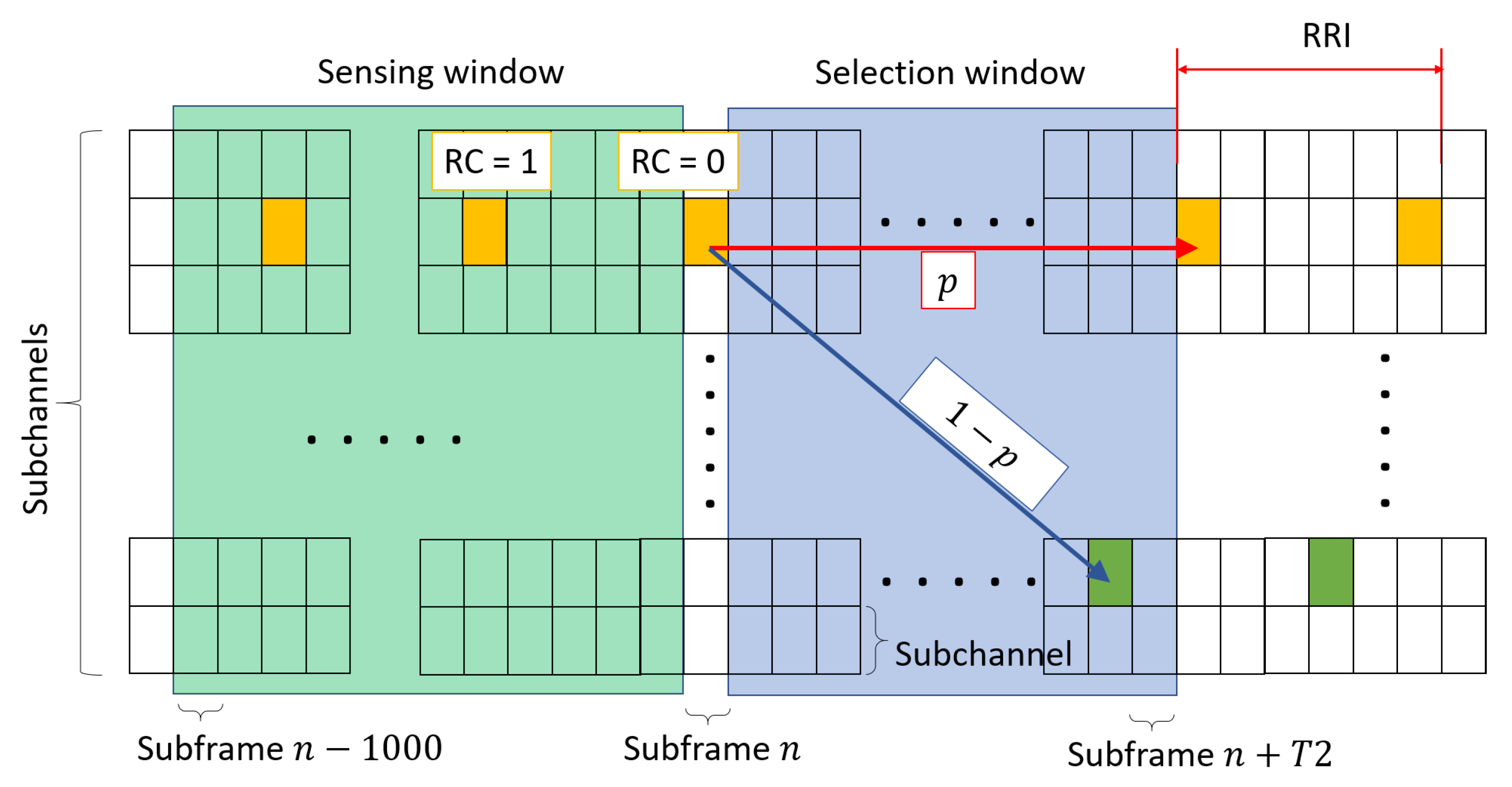
The resource scheduling in C-V2X is done over a two-dimensional space, where the two axes are time and frequency (
Figure 1). The wireless resource grid is divided into subchannels in frequency and subframes in time. In the frequency axis, the granularity of resource allocation is a subchannel. Each block in the grid (e.g., small colored boxes in the figure) is called the single-subframe resource, and it is composed of multiple resource blocks (RBs). Since there is no central coordinator for the resource scheduling in SL Mode 4, each UE monitors the resource usage by other UEs before selecting the resource for its BSM transmission. This is called
sensing. The resource that has been used (or is predicted to be used) by other UEs are marked busy and not selected for transmission to prevent the message collision.
In the sensing window, 1000 subframes (1 s) in the immediate past are monitored. For pedestrian devices,
partial sensing is allowed for battery saving. Whether a given resource is being used is determined based on the RSSI threshold called the sidelink RSSI (S-RSSI) threshold, above which a single-frame resource is considered busy. The standard does not specify the value of this threshold, but the 3GPP working documents usually compute this threshold by adding –107 dBm/RB in the subchannel [
37]. Based on the sensing result, the next selection step determines which single-subframe resource it should exclude from the selection window as unusable. Essentially, the resources that have been used by other UEs in the sensing window enable us to determine if a resource in the selection window will likely be available.
3.2. Selection
Suppose a UE
V is at subframe
n. For a BSM transmission,
V needs to reserve new subchannel(s) whose number depends on the packet size at a subframe in
, where
and
[
21]. The interval between
and
is called the
selection window (
Figure 1). In this window, candidate single-subframe resources (CSRs) are selected after filtering out two unusable groups of resources. First, for the single-subframe resource
m in the selection window, a UE marks it unavailable if
V was transmitting in subframes
in the sensing window. This is because the subframes at which
V transmitted its packet could not be sensed by
V due to half-duplex transmission. Because there might be other UEs that transmitted in these subframes, the subframe
m is excluded to avoid possible collisions with these UEs. Second, we exclude the resources that will probably be used by other UEs. These are the single-subframe resources
in the same subchannel(s) where
were used. Whether a resource was used or not is determined by a reference signal received power (RSRP) sensed higher than the threshold corresponding to the priority of
V’s packet to be transmitted. The priority is provided by the higher layers [
21,
36]. After excluding these two groups of resources, the remaining resources are called the set
.
In case the single-subframe resources in
is less than 20% of the entire selection window, then more candidate resources should be identified. For this, we raise the RSRP threshold by 3 dB, and repeat the filtering process for the second group. If
becomes larger than 20%, then we choose those with the smallest RSSI values, which we call
. We report
to the higher layer that randomly selects one of them for the first transmission. The number of times that the subchannel(s) for the selected resource is used without the selection process is also randomly selected and is called SL_RESELECTION_COUNTER [
20], or simply RC counter in this paper.
3.3. Reselection
Each packet transmitted in a streak, each RRI apart from the previous one, decrements the RC counter by one. The streak length, namely the RC counter, is randomly set to one value in . The range of the random number depends on the RRI. It is if RRI is 100 ms or higher, in if RRI is 50 ms, and in if RRI is 20 ms. Notice that the average length of the streak is designed to last only a second, hence semi-persistent scheduling.
When RC reaches 0, the next streak should be scheduled. This operation is called
reselection. First, a decision is made as to whether a different resource should be chosen from the selection window using sensing again or the current resource location is kept. In the latter case, the same RRI is maintained between the last packet in the current streak and the first packet in the next streak. The decision is controlled by the resource keeping probability
probResourceKeep that the upper layers configure [
20]. For the decision, a random number in the interval
is generated, and if it is larger than
probResourceKeep, a different resource should be used for the next streak. Otherwise, the UE continues to use the current resource. In either case, however, a new RC counter value should be decided as above, according to the RRI.
Figure 1 shows an example where the UE is at the point of deciding whether it should change the resource location with probability
or it should maintain the current resource for another streak with
p. The standards stipulate that the probability
p in the figure,
probResourceKeep, should be configured to be between 0 and 0.8.
As we discussed in
Section 1, there are two reasons why we keep reselecting resources. With only a few choices of RRI [
20], without any collision resolution mechanism similar to DSRC, and with multiple packets transmitted in a single streak, UEs can collide multiple times without knowing it. Therefore, the streak is designed to last only a second on average so that any colliding UEs can part from the other in a second. The packet collisions can also occur when new vehicles join the group of vehicles that are already coordinating the resource use through the sensing-based SPS.
In this paper, we focus on this reselection step to improve the packet collision mitigation performance. Thus, we assume that has been already computed according to the standard. Algorithm 1 describes the reselection part in the SPS algorithm, to be used for our simulation experiments below.
| Algorithm 1 Reselection by a UE in SPS |
| 1: procedure SPS () | |
| 2: | ▹ Initializations for |
| 3: | |
| 4: | |
| 5: | ▹ This is the current time |
6: |
| 7: while do | |
| 8: if then | ▹ It is time to transmit |
| 9: | ▹ Transmit packet on the specified subchannel(s) |
| 10: if then | ▹ Not time for reselection yet |
| 11: | ▹ Schedule next packet in one RRI |
| 12: | |
| 13: else | ▹ Time to reselect for next streak |
| 14: | |
| 15: if then | ▹ Should keep the same resource location |
| 16: | ▹ Maintain the same RRI across streaks |
| 17: else | ▹ Must move to other location for the next streak |
| 18: | ▹ Reselect and ; Section 3.2 |
| 19: end if | |
| 20: end if | |
| 21: else | |
| 22: | ▹ Keep sensing and update resource use map; Section 3.1 |
| 23: end if | |
| 24: | ▹ Push time |
| 25: end while | |
| 26: end procedure | |
In Algorithm 1,
is the subchannel where the UE will transmit its BSMS in the next streak. In line 2, it is initially randomly selected from among
subchannels in the carrier. In line 18, when the reselection happens, a new resource location will be chosen. Otherwise, the current location will be kept (line 15). In case the resource location must be changed, the sensing-based SPS discussed in
Section 3.2 is performed. The subframe index of the BSM transmission,
, is also randomly selected at the beginning. It is incremented by RRI (line 16). The length of the next streak is always randomly selected (lines 4, 14). In line 22, the resource use map is updated using the sensing procedure described in
Section 3.1.
5. Performance Evaluation
5.1. Analysis
Here, we perform an average-case analysis of SPS to understand its dynamics in terms of the many parameters it uses. In particular, we focus on the collision probability upon (re)selection because under the sensing and/or the lookahead, it is the only occasion when the collision can take place. Although the collision upon the (re)selection leads to a multiple packet collision because of the semi-persistency, the number of such ensued packet collisions will be identical for both schemes. Thus, we focus on the collision probability on (re)selection.
To facilitate analysis, we apply some simplifying assumptions. First, we set
, namely, we do not keep the current resource upon reselection [
35]. Second, we assume that the vehicle population is static, namely no churn in the membership. Suppose the vehicular UE
V reached
at subframe
n. Let
is the number of subchannels in the given carrier, and
is the selection window width. In the reselection for a vehicle
V, there are
single-subframe resources in the selection window. Among them,
are available for reselection. Here, CBR measured in subframe
n is defined to be the portion of subchannels in the resource pool whose RSSI measured by the UE exceed a (pre-)configured threshold sensed over subframes
[
39]. Essentially, it is the resource use. Although the UEs that reselect in
will not use their current resource locations because
, other UEs do not use these locations because of their sensing result in the previous RRI (see discussion in
Section 4), so
R accounts for this inefficiency as well. In each subframe, there are
UEs transmitting on average. In subframe
n, there are
nodes on average whose RC counter reached 0 including
V, where
. For simplicity, we assume that every UE has the same RRI of 100 ms so that every UE can reselect only a single resource in the selection window. Any one of these contending UEs with
reselects a resource location in
R with probability
. In subframe
n, the probability
that a UE
V collides with other UE(s) on the same subframe
n is given by
In subframe
, there are
UEs that expired their RCs that can be contending with
V. With
V, they share
subframes in the selection window. The probability that a UE there selects one resource in the overlapped window is
. As above, the probability
that a UE
V collides with other UE(s) on this subframe
is given by
Then, the total collision probability for
V can be computed as
Notice that is a function of the system parameters , , , , , and the traffic load (CBR).
In contrast, the SPS/LA scheme removes the collisions caused by the UEs transmitting in the past subframes (Equation (
2)), hence
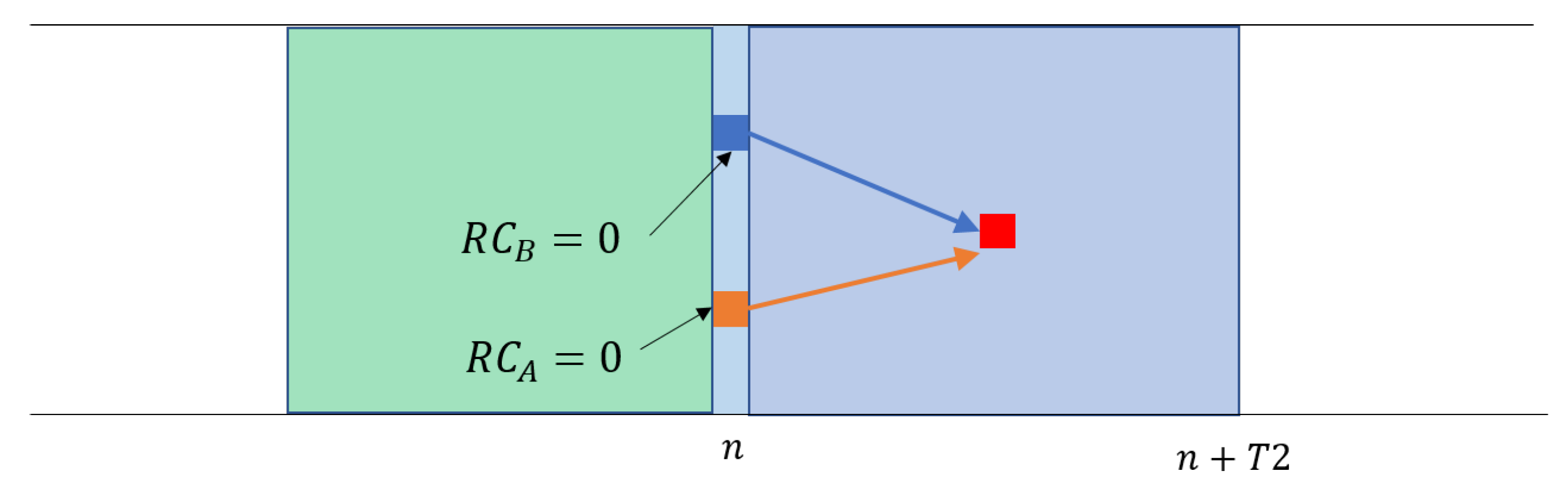
. This is because these UEs make their plans known,
V can avoid the locations they plan to use in its sensing window. The only collisions are caused by the UEs in the same subframe as
V with their RC expiring, whose transmissions are mutually hidden (
Figure 4).
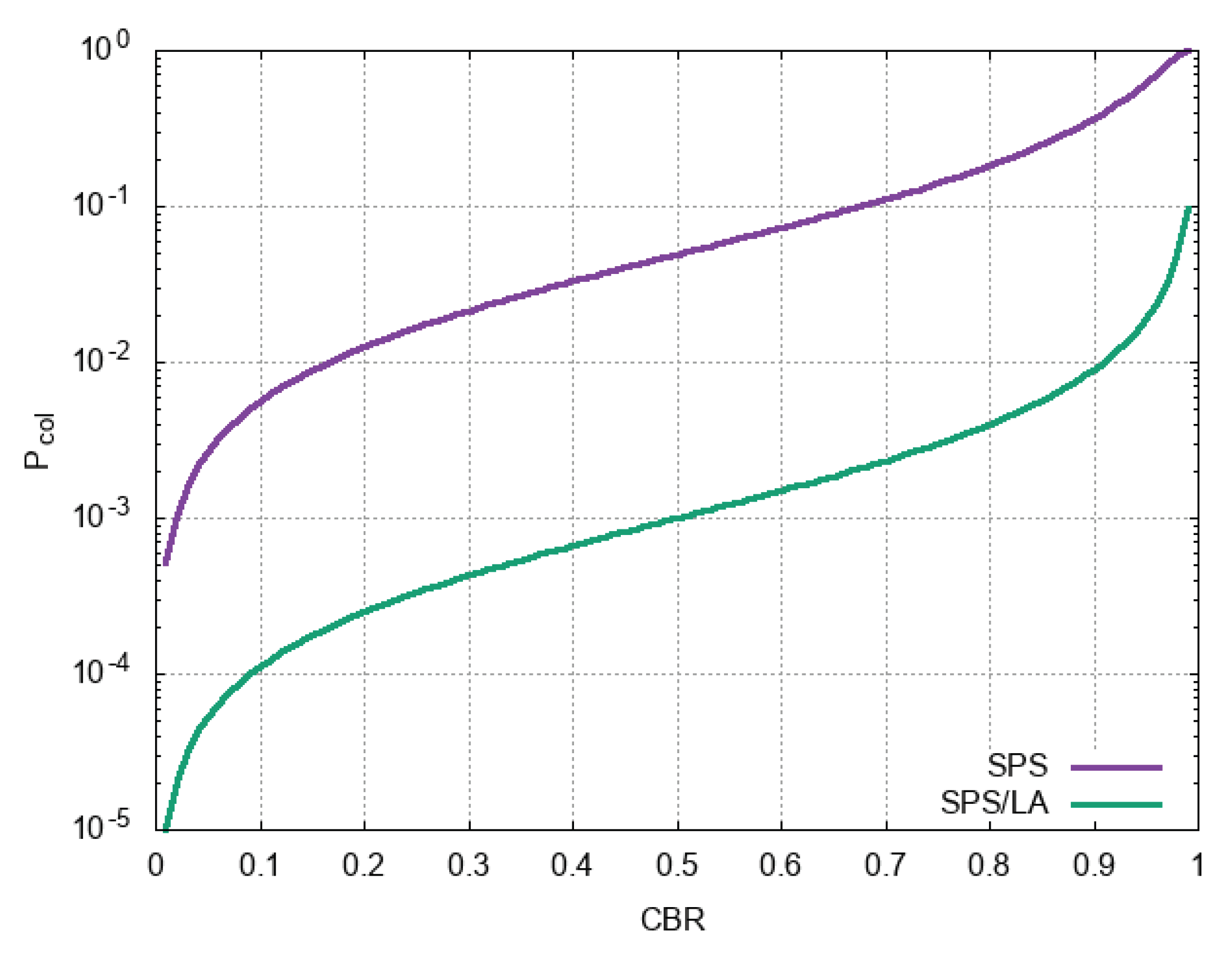
Figure 6 shows the collision probabilities upon (re)selection for the two schemes as a function of CBR. We observe that the collision probability is more than an order of magnitude lower in SPS/LA. In practice, the collision probability of the SPS/LA grows higher than Equation (
1). It is due to the reverting to the original SPS selection that we need for the last-minute check before the final commit to the lookahead (lines 26 and 30 in Algorithm 2. Especially when the CBR increase to a high number, such reversions are more likely. Nevertheless,
Figure 6 tells us how an additional piece of information regarding each UE’s plan of resource use can reduce message collisions in SPS. We will confirm it through simulations below, under more various settings.
5.2. Simulation
In this section, we conduct simulations to verify the analysis above. Since we focus on the purely algorithmic aspect of the sensing-based SPS and our proposal to enhance it, and the problem formulation is simple, we use a homegrown simulator written in Python. We run ten instances of each simulation instance to obtain narrow enough confidence intervals for the results. We assume that UEs are static, and for the channel propagation, we assume the simple disc model where all UEs within the communication range enjoy the perfect physical channel. The only exception to the static UE locations is one experiment where the population churn, due to new UEs joining in the communication range and others leaving, is modeled and its impact is observed. Please note that our intention in this paper is to demonstrate the point that even under perfect physical-layer conditions, the current standard SPS algorithm exhibits serious shortcomings in resolving resource conflicts and providing high-reliability communication. Due to the perfect propagation model, the spatial distribution of the UEs is immaterial. Towards the end of this paper, however, we briefly discuss the expected impacts of a more realistic physical configurations in terms of the wireless channel. In particular, we consider how such imperfect physical channel will affect the use of the lookahead and the consequent performance impacts.
For the simulation experiments, we use the following assumptions. First, the packet size is uniform at 300 bytes, and each packet requires a single-subframe resource. (For the optimization focusing on the uneven packet sizes, readers are referred to Molina-Masegosa [
33].) Second, the sensing-based candidate resource selections (i.e.,
and
) have been already performed, at which instant our simulation starts. Packets are periodically transmitted every
ms. Following the standard, we set the RC range at
. For the selection window, we set
. We turn off the retransmission, so each BSM is transmitted only once. For the resource pool, we assume that a 20-MHz channel at 5.9 GHz is completely dedicated to Mode 4 using adjacent PSCCH + PSSCH subchannelization. We assume that there are
subchannels of 8 RBs each are defined per subframe. The maximum number of UEs is 2500 if their RRI is 100 ms, and 500 if RRI is 20 ms. The simulation parameters are summarized in
Table 1.
For the performance metric, here we use the collision probability. Please note that it is not the collision probability of the reselection operation that we considered in the analysis above. Instead, we use the fraction of the single-frame resources to which more than one packet arrived, out of the entire set of single-subframe resources generated throughout the simulation. Each simulation lasts 100 s, so the total number of single-subframe resources are 2,500,000. The presented results are averages of 10 simulation runs.
5.2.1. No Population Churn
In the first set of experiments, we consider the case where we have a stable topology, so there are no new vehicles joining or existing members leaving the communication range. We set the probability , so that when RC reaches 0, a UE always reselects a different resource. We divide the CBR into two regimes: 1–5% and 10–90%. To create the CBR from 1% to 5%, we place 25 to 125 vehicles in mutual communication range. To create the CBR from 10% to 90%, we place 250 to 2250 vehicles in mutual communication range.
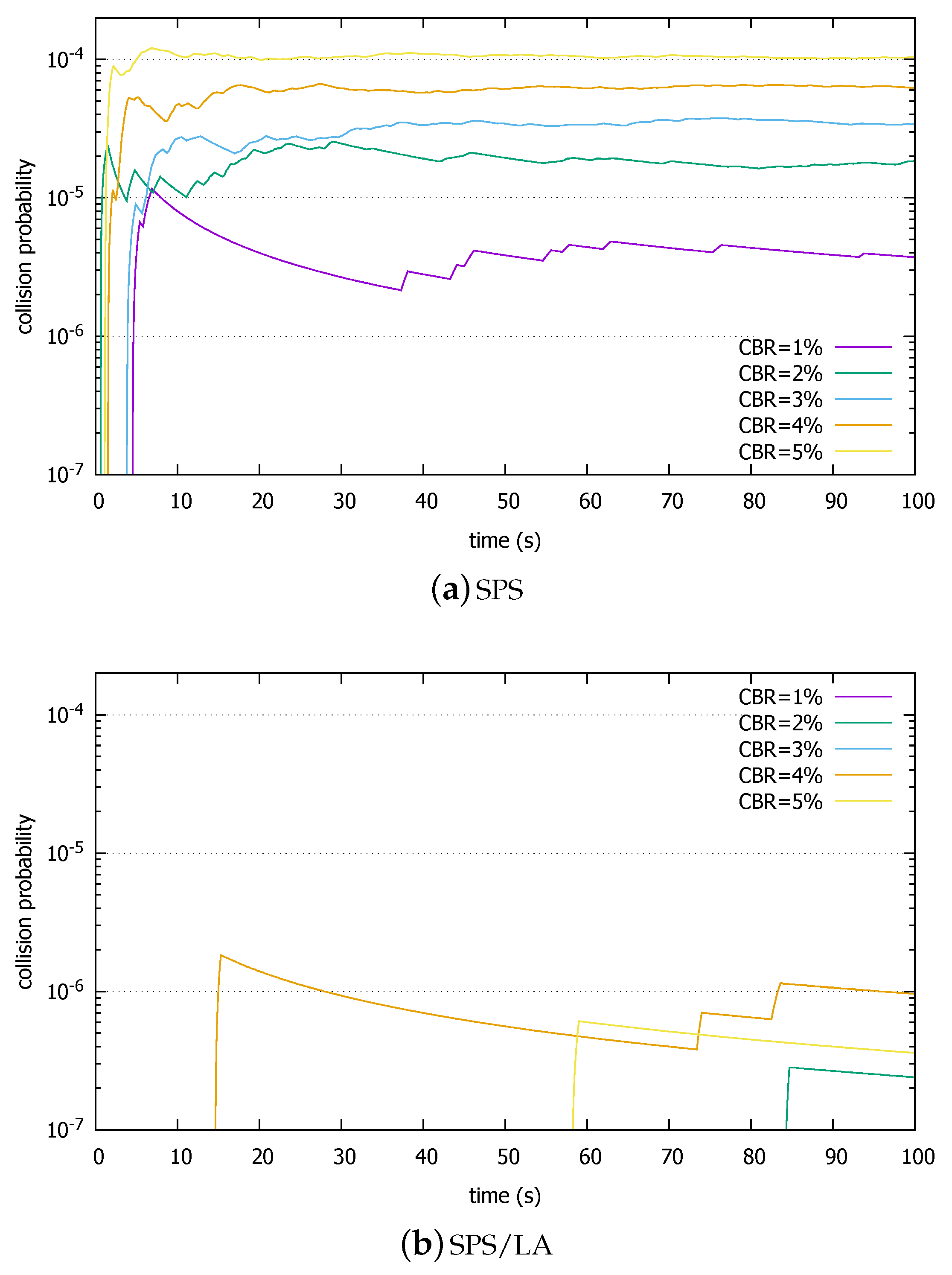
Figure 7 compares the collision probabilities of SPS and SPS/LA. The collision probability plotted in the figure is computed as the total number of collisions divided by the total number of single-subframe resources during the elapsed time. For example, the value at 40 s is obtained by dividing the number of collisions up to that time by the number of single-subframe resources during that time (=
=
). Notice that the
y-axis is in log scale. Under very light loads, the standard SPS scheme keeps the collision probability under
. However, in the SPS/LA, the probability is even lower, orders of magnitudes lower (compare the
y-axis with SPS). The collision probabilities approach
. In particular, there was no collision in 1 and 2% CBR during 100 s of simulated time. It bears out our analysis where the reselection collisions are similarly reduced in SPS/LA.
As we run ten instances of simulation for each data point, the confidence interval is very narrow, and hard to see with the log scale plots.
Table 2 shows the 95% confidence interval at simulation time
.
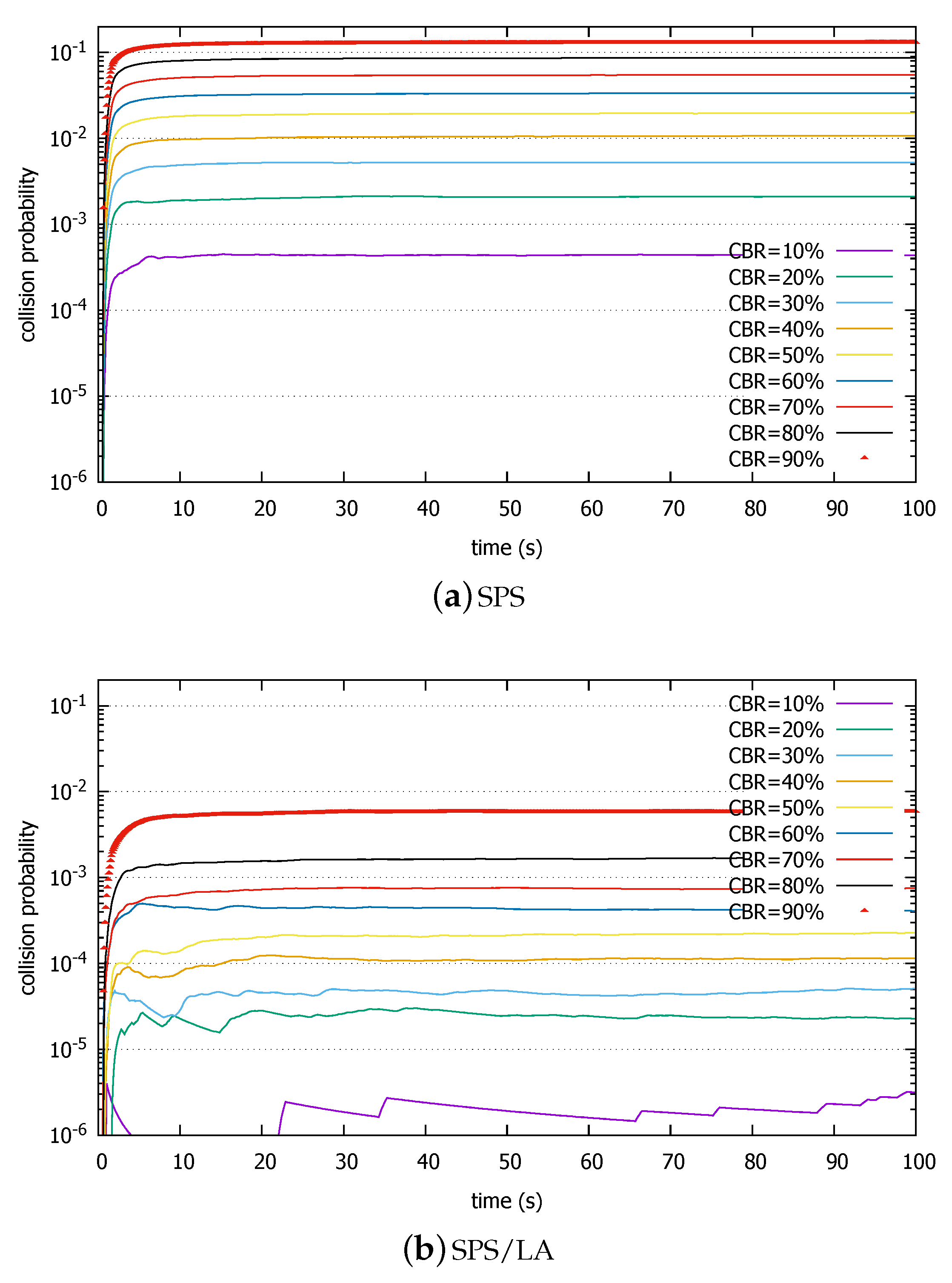
Now, we increase the CBR.
Figure 8 shows the results. We notice that the collision probability far exceeds
in SPS even for 10% CBR. This number is important because some prominent applications envisioned for 5G eV2X require 99.99% reliability (
Table 3) [
40]. 5G eV2X will probably use a different radio resource format, but still the SPS performance is disappointing. When the CBR reaches 90%, the collision probability is 12.8%. In SPS/LA, we notice that the collision probability is reduced by a factor of 10 or more compared with the original SPS. Again, this result is in line with the reselection collision probability analysis. In particular, the SPS/LA scheme keeps the probability under
until the CBR exceeds 40%. Even when the CBR increase further, the performance gap between the two algorithms is maintained at more than an order of magnitude. For an extremely high CBR of 90%, the collision probability under SPS/LA is still under 0.6%, compared with 12.8% under SPS.
Again, we show the mean and the 95% confidence interval widths for each case in
Table 4. We again see that the confidence interval width is very small. We obtain the same narrow confidence intervals, so for subsequent results, we omit them.
Since we did not allow any population churn in this experiment, the only collisions arise from the reselection at with the blind choice of the resource for the next streak. The lookahead turns the blinded ventures into the enlightened choices in SPS/LA, thereby significantly reducing the collision probability.
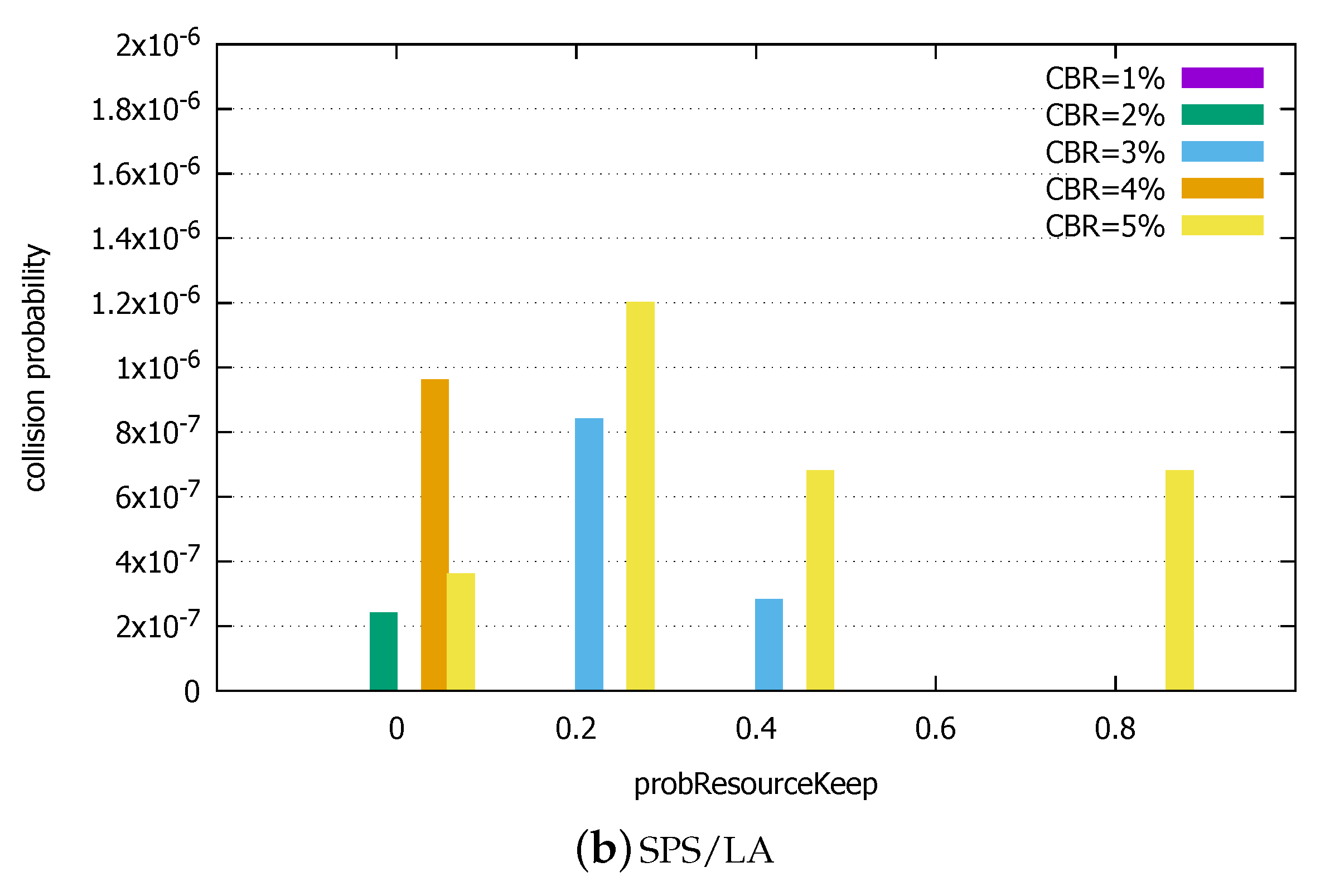
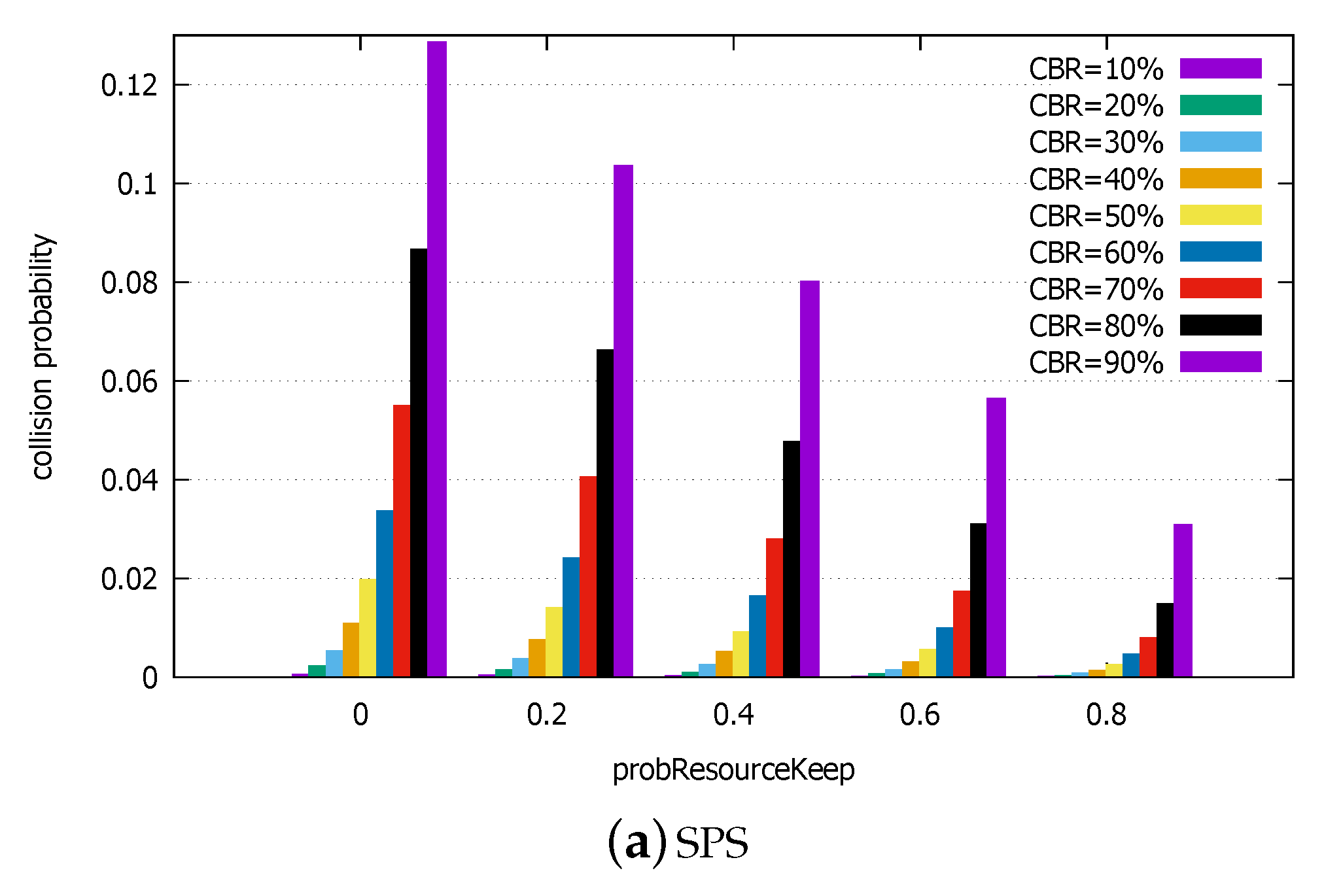
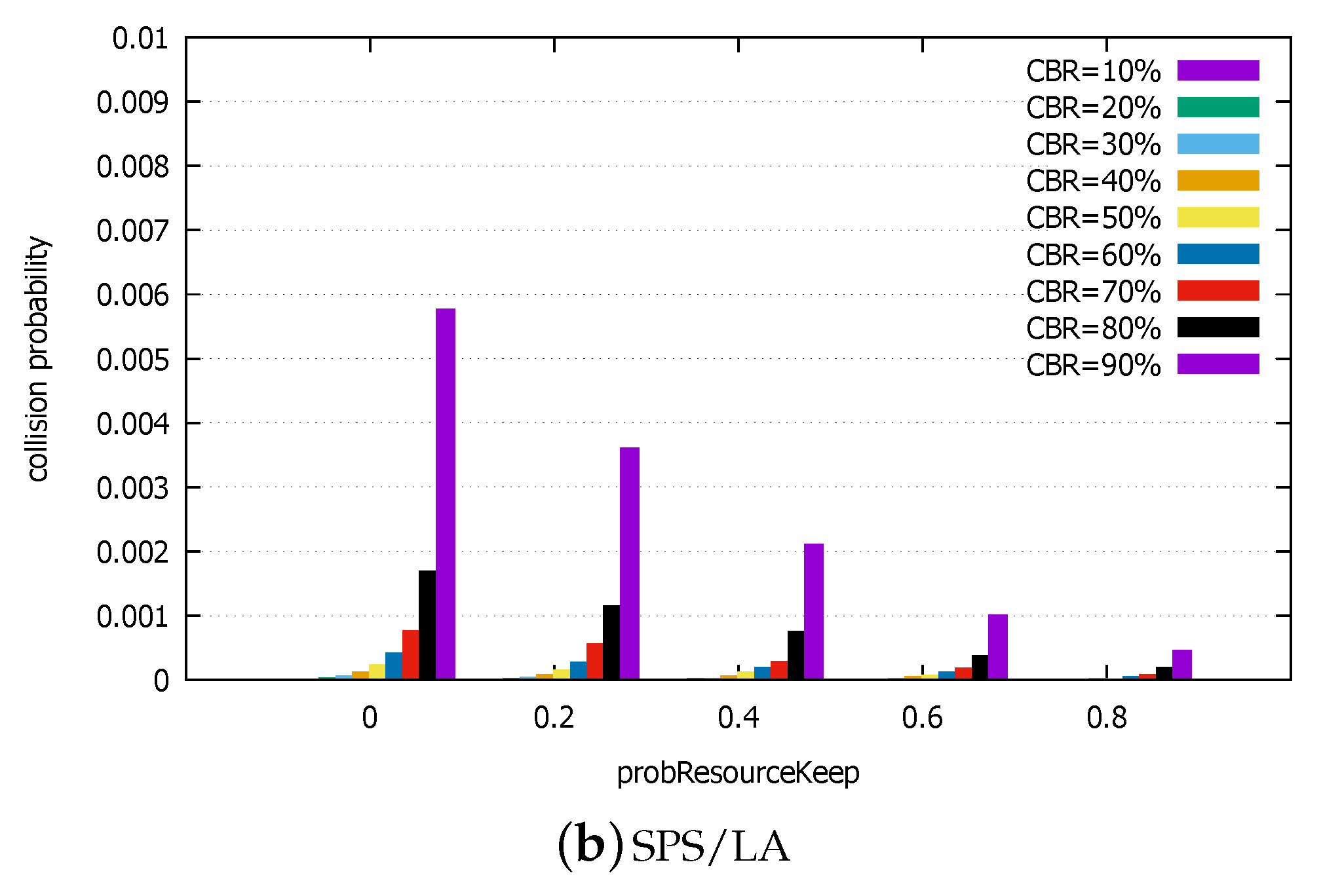
5.2.2. Nonzero Resource Keeping Probability
Here, we again assume that there is no population churn. It is to focus on the impact of the moving probability
.
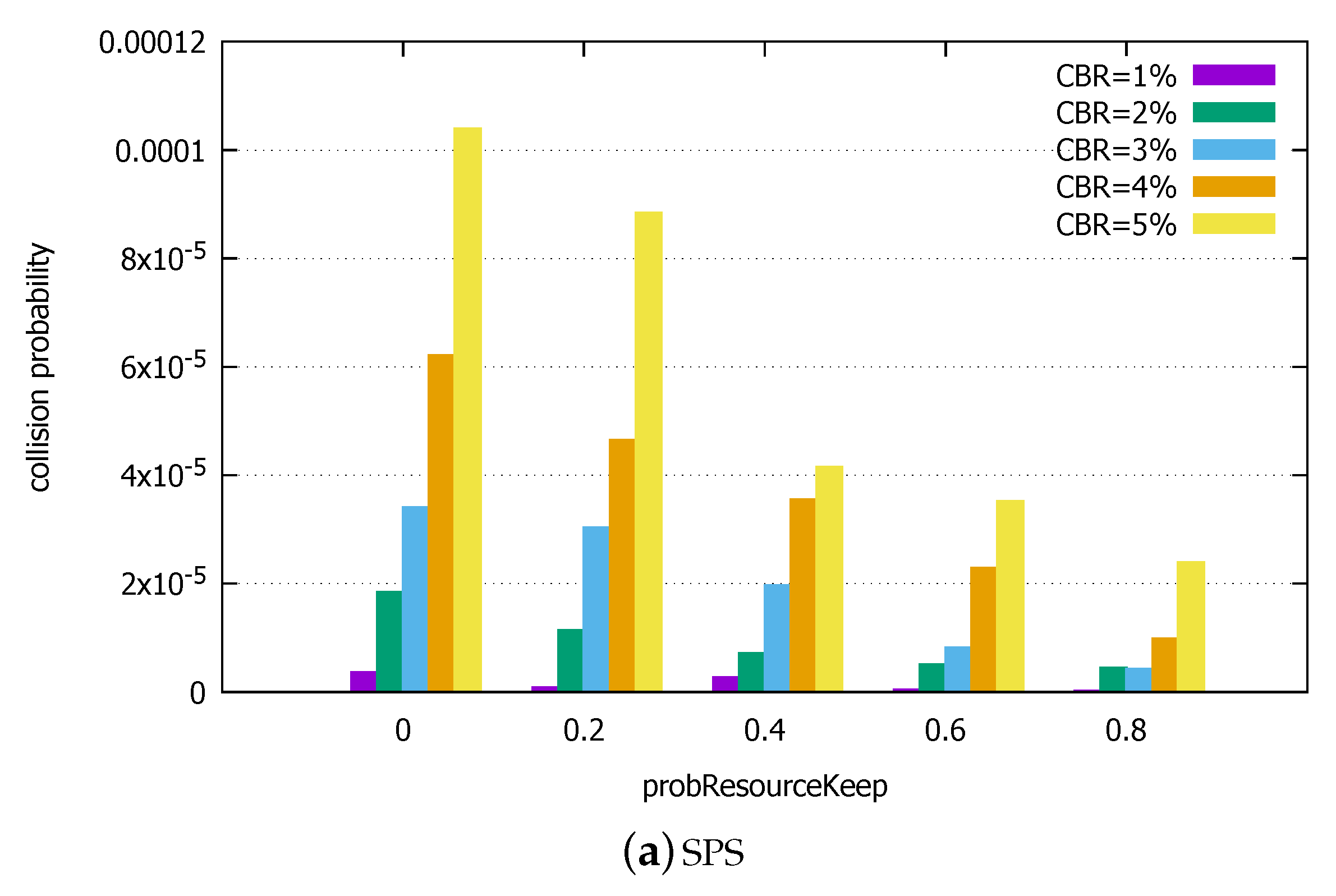
Figure 9 compares the collision probabilities of SPS and SPS/LA under various
, ranging from 0.2 to 0.8. To give the readers more direct sense of the performance differences, henceforth we use the linear scale on the
y-axis. We present only the collision probability at the end of the simulation when the probability has been stabilized.
First, we notice that there is impact from varying
in SPS. Specifically, as the resource keeping probability increases, the collision probability decreases. This result is in line with other works [
30]. Also, it confirms our earlier observation that the collisions are a direct consequence of blind reselection. Nevertheless, we cannot simply prohibit reselection to reduce the collision probability because the reselection also serves to accommodate topology dynamics in the vehicle traffic. In
Section 5.2.3, we will observe the impact of
under more dynamic population changes.
Compared to SPS, the SPS/LA scheme rarely produces collisions under the light load. Specifically, the collision probability, if not zero, is frequently orders of magnitudes smaller than in SPS.
Under heavier traffic loads in
Figure 10, we first notice that the collision probability superlinearly increases in CBR in both schemes. Here again, increasing
has a collision mitigating effect. We can also clearly observe that SPS/LA significantly reduces the collision probability, maintaining the order-of-magnitude performance gap.
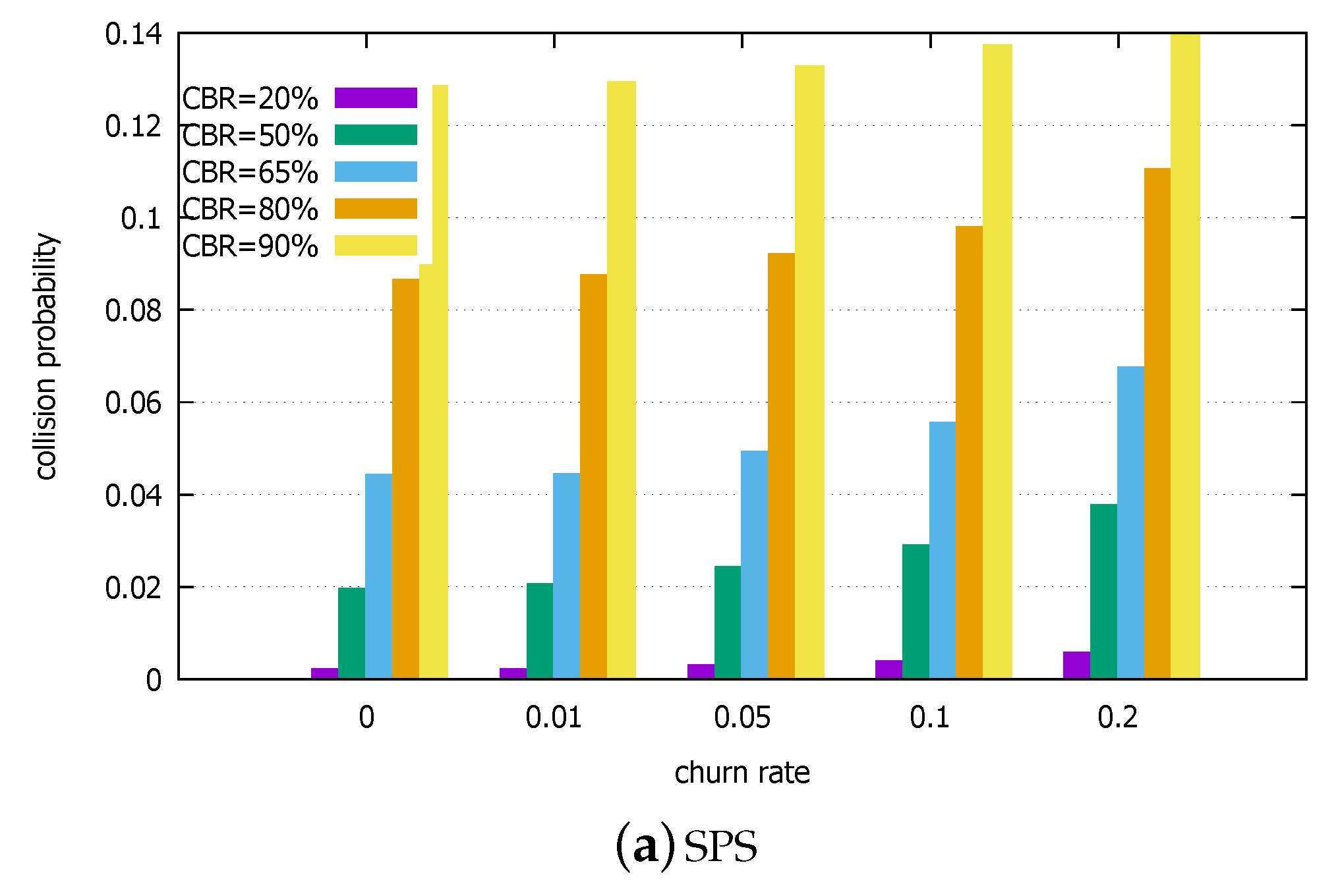
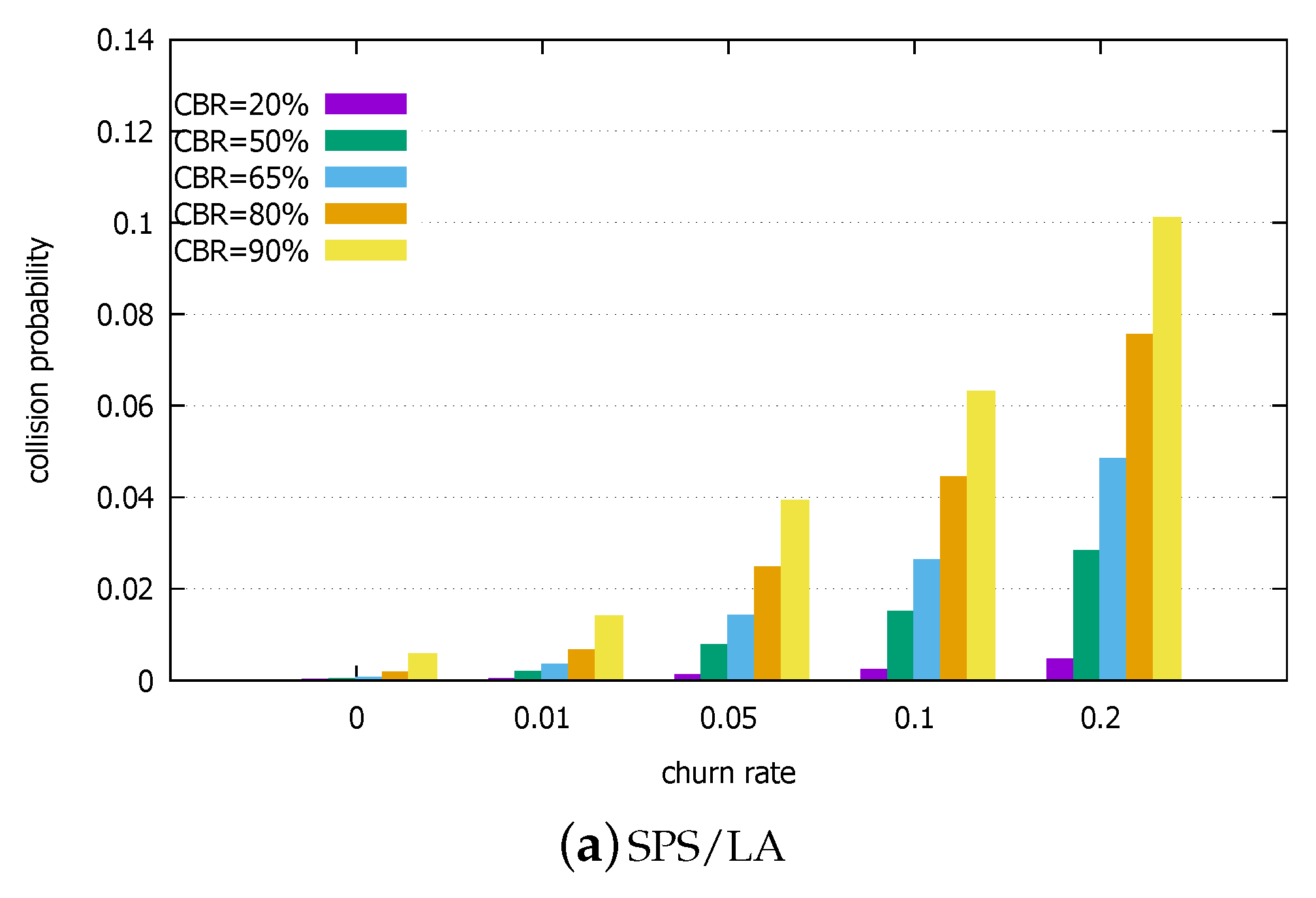
5.2.3. Population Churn
Now, we allow the population churn. This is necessary for more realistic scenario because vehicles come into and go out of the communication range even in stable driving environments. It is even more dynamic when roads merge or in the intersection, etc.. To simply the experiment setting, we let new vehicles come in to the communicating group of vehicles at a churn rate (%/s) and some in the group exit at the same rate. For example, the churn rate of at % corresponds to 5 vehicles newly joining/leaving from the entire population of 500 vehicles every second. It simulates a very stable group of vehicles in terms of churn. On the other hand, at % corresponds to 450 vehicles changing per second, which is a very high dynamics scenario. We assume that the newly joining UEs randomly choose their initial resource locations, without any chance for sensing. Please note that it is a rather harsh assumption because as vehicles join, they will be able to perform sensing at least for a short duration. However, to stress the two schemes, we assume so.
Figure 11 shows the results. We observe that with the churn rate increasing, the collision probability increases in both schemes. This is in line with the observation made by Bonjorn et al. [
32]. It is expected because under our harsh assumption above, the initial collisions are not preventable. We also observe that SPS/LA is more heavily affected by the harsh assumption. It reflects the fact that the SPS/LA scheme effectively controls the other type of collisions, namely those arising from the lack of coordination among vehicles as to the resource reselection in SPS. In contrast, the SPS performance only slightly degraded. It implies that for the SPS without the lookahead, most of the collisions are of similar blind nature to the newly joining vehicles in this experiment. Overall, the SPS/LA performs better than SPS, even with very high churn rates.
5.3. Channel Impacts on the Proposed Algorithm
In this paper, we focused on the algorithmic aspects of the sensing-based SPS algorithm, and abstract away the physical-layer issues such as coverage, path loss, fading, and hidden terminals. We intended to demonstrate the point that even under perfect physical-layer conditions, the current standard SPS algorithm exhibits serious shortcomings in resolving resource conflicts and providing high-reliability communication. However, to evaluate the performance impact of the proposed lookahead scheme more precisely, we would include the physical-layer properties in the simulation. We defer it to a future work, but here we provide a brief discussion on the expected impacts of the physical-layer features.
In case there are hidden terminals attempting to reserve an overlapping set of resources using the lookahead, the UEs that are in the hearing distance of both the hidden terminals will not be able to hear from either. However, this problem is not specific to our proposed scheme. It is also a problem for the sensing-based SPS as well. In fact, it is a problem for any resource reservation scheme based on the physical sensing. Even the virtual carrier sensing feature in 802.11 is not applicable in DSRC because the beacon messages are broadcast. Therefore, we believe that this problem is beyond the scope of this paper and should be separately addressed.
In case the lookahead is not received correctly due to various physical-layer degenerations such as path loss and fading, the receiving UEs can consider the reserved resource as still available. The lack of lookahead information, however, reverts the system back to the original sensing-based SPS algorithm because in our algorithm all UEs will check the validity of their reservations when their RC reaches zero, regardless of their published lookahead (line 26, Algorithm 2). Therefore, the addition of lookahead does not produce a side-effect when combined with its loss due to the adverse channel conditions.
Finally, let us consider the case where two UEs, A and B, have the asymmetric channel condition. Without loss of generality, let us suppose A can hear the reservation made by B through the lookahead but not vice versa. In our algorithm, the node that sees a resource block being reserved by other UE should change its target (
Section 4.3). Thus, if only A hears B making the reservation first, A will choose another resource as the algorithm intends. In case A makes the first reservation through the lookahead but B cannot hear it, B will go ahead and make the reservation for the overlapping resource through the lookahead. If A hears it before it commits at
, A recognizes the asymmetric channel condition and should change its reservation. If B does not make the reservation before A finally commits at
, the case becomes similar to
Figure 4, except that A and B do not have to use the same subframe to experience the problem. However, again, this problem does not make the proposed algorithm worse than the original SPS algorithm. In the SPS, A and B do not even have a chance to realize the conflict at all. The lookahead scheme at least has a chance to resolve one case where A can hear B.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}