1. Introduction
Welding is a dynamic, interactive, and non-linear process. The monitoring of welding defects is a difficult problem due to these characteristics of welding. The main difficulties in this task include deciding when a defect occurred and which type of defect occurred. In the actual welding process, skilled welders can dynamically adjust the welding process from observing the state of molten pool to prevent welding defects. That gave rise to our idea that we could adjust the welding process by observing the molten pool. An accurate mapping model between the molten pool image and the weld quality is a vital part of this method [
1,
2]. The molten pool images are independently used as inputs to this model. A typical molten pool image contains many objects, such as welding wire, arc, molten pool, weld seam, metal accumulation, splash, smoke, etc. Although the molten pool is the main part of the whole image, it is necessary to consider all objects and the relationship between various objects for the purpose of accurately reflecting the welding information through the molten pool image. Therefore, extracting the features from all objects in the molten pool image and hybridizing the different features are the key to establishing an accurate mapping model.
The research of molten pool image can be divided into two categories. One of them is based on multiple molten pool images. The main idea is to find the mutation rule of molten pool characteristic signals when welding defects occur by multi-level (time domain, frequency domain) statistical analysis of the characteristics of multiple molten pool images [
3,
4,
5,
6,
7,
8]. This idea can synthetically consider the molten pool images’ information of the whole welding process, and the features used for analysis are generally primary features, which are relatively easy to design and obtain. However, this idea can only be used to analyze the overall welding quality and locate the welding defects after welding is complete and does not satisfy requirements of real-time monitoring of welding. Another idea is based on single molten pool images, which is more suitable for an online monitoring process [
9,
10,
11,
12,
13]. In studying molten pool images of the welding process, the most original method is to manually design and identify the statistics of the characteristics of molten pool (length, width, area, spatter number, etc.) and then identify the molten pool state. Although this method is highly interpretable, it requires a lot of prior knowledge and is very time-consuming. Furthermore, such a model poorly adapts to other image classification problems. With the development of deep learning, convolutional neural network (CNN) replaced the process of human design and the extraction of primary features, achieving great results [
14,
15,
16]. However, for the purpose of further improving the accuracy of defect recognition, more convolutional layers need to be stacked in the feature fusion stage, which will bring huge computational cost, making real-time monitoring infeasible. In view of the existing problems in the feature hybrid stage, principal component analysis (PCA) and fully connected layers are widely used to combine the results of feature extraction [
17,
18,
19,
20,
21]. Although PCA has great interpretability, such a deterministic process may leave out features with small contributions, and these features may entail important information about welding quality. Therefore, the process of feature information fusion lacks the ability of intelligent fusion. Adding a fully connected layer and adjusting the weight of each shallow feature using back propagation can play a certain role in intelligent hybrid of features; however, this hybrid method is often too simple and insufficient to extract high-level abstract information.
Traditional neural networks (including CNN) assume that all inputs and outputs are independent of each other, while the basic assumption of recurrent neural network (RNN) is that there is an interaction between the input sequences, and this feature of RNN provides a new approach to feature hybrid [
22,
23]. References [
24,
25,
26,
27,
28,
29,
30] propose a method for intelligently hybridizing the features of each individual in the input sequence using the long short-term memory network (LSTM, a variant of RNN), which can extract the long-term dependencies of the data features in the sequence to improve the recognition accuracy. However, the original input of the whole online molten pool status recognition task is a single molten pool image at a certain moment rather than a sequence of images. Therefore, in view of the above problems and the complexity of the molten pool images, this paper proposes an innovative strategy. In the feature extraction stage, multiple convolutional kernels are used to scan the whole molten pool image to obtain the redundant features of all objects in the molten pool image. Due to the distance that the convolution kernel slides each time is less than the size of the convolution kernel itself, and there are overlapping parts in each scan area of the convolution kernel, so the feature blocks extracted by the convolution kernel also depend strongly on each other. When describing a thing, we often hope to construct a set of bases, which can form a complete description of a thing. The same is true in the same level of a convolution network, that is, the relationship between feature maps extracted from the same level of convolution kernels lies in the formation of a description of images on different bases at the same level. So in the stage of feature fusion, several feature images extracted by CNN are unified and reconstructed into a two-dimensional feature matrix that contains the correlation information from the interior of a single feature image and from multiple feature images. In order to improve the accuracy of molten pool image recognition, each row of the feature matrix is considered as a basic unit to be hybridized, and the number of rows is considered as the length of a sequence. In this way, the single image of molten pool is converted into “sequential” data in this sense. Then, the long-term dependencies property of the LSTM network is used to filter and fusion the rows of the feature matrix to obtain high-level abstract information. In this case, the model is transformed into a multi-input single-output model like text sentiment analysis. Each input can be understood as a contribution of the feature vector at this time step to the overall molten pool image identification task in the context. The CNN–LSTM algorithm proposed in this paper establishes the end-to-end mapping relationship between molten pool image and welding defects. The advantage of this algorithm is that it can intelligently learn the best hybrid features through the error back propagation algorithm in the shallow CNN network for a single molten pool image to meet the engineering requirements for real-time monitoring of the welding process. In this paper, the molten pool image is obtained by a CO
2 welding test. The feasibility, superiority to other models, and contribution sources of the proposed algorithm are tested and studied. The experiment is carried out on the MNIST and FashionMNIST datasets to illustrate the versatility of the CNN–LSTM algorithm. The feature hybrid method in this paper also has certain reference significance for similar image recognition tasks.
2. Deep Learning Model Based on CNN–LSTM
A CNN is a neural network that uses convolution operation instead of traditional matrix multiplication in at least one layer of the network. It is especially used to deal with data with similar grid structures, a data structure common in computer vision and image processing [
14]. The 2D image data can be directly used as the bottom-level input of a CNN, and then the essential features of the image are extracted layer-by-layer through convolution and pooling operations. These features have the invariance of translation, rotation, and scaling. However, the output layer of the traditional CNN is fully connected with the hidden layer. This feature fusion method which takes all outputs of the convolutional layer is far too simple for the purpose of our model. Problems with this method include bad kernels, multiple kernels extracting the same information, and unnecessary information extracted by kernels. It is possible to extract deeper image features and improve recognition accuracy by increasing the number of convolutional kernels, convolutional layers, and pooling layers. But it will undoubtedly lead to a huge network, thereby increasing the cost of computation, and also facing the risk of overfitting [
14,
15]. As a time recurrent neural network, LSTM is suitable for processing the sequence problem with time dependence. The input feature tensor is selectively forgotten, input and output through three threshold structures. It can filter and fuse the empty input, similar information, and unnecessary information extracted by the convolutional kernels, so that the effective feature information can be stored in the state cell for a long time. Therefore, an algorithm combining CNN and LSTM was proposed in literature [
24,
25,
26,
27,
28,
29,
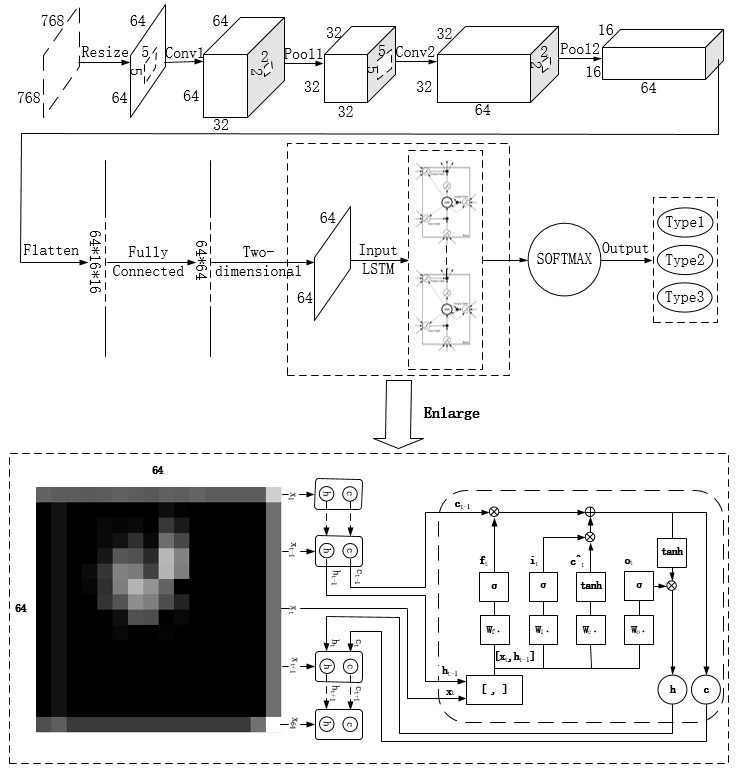
30], which has achieved good results in gesture recognition, voice recognition, rainfall prediction, machine health condition prediction, text analysis, and other fields. However, the above literature is targeted at prediction tasks, and the input of LSTM is also a batch of images in time series. But the molten pool online monitoring process is faced with the identification task. The original input of this task is a single molten pool image taken by the camera at a certain moment. The ideas of sequence dependency are clearly inapplicable to this problem. Therefore, in view of the above problems, this paper proposes an algorithm named CNN–LSTM for the online monitoring task of the molten pool, which hybridizes the advantages of CNN and LSTM. The overall architecture of CNN–LSTM is shown in
Figure 1.
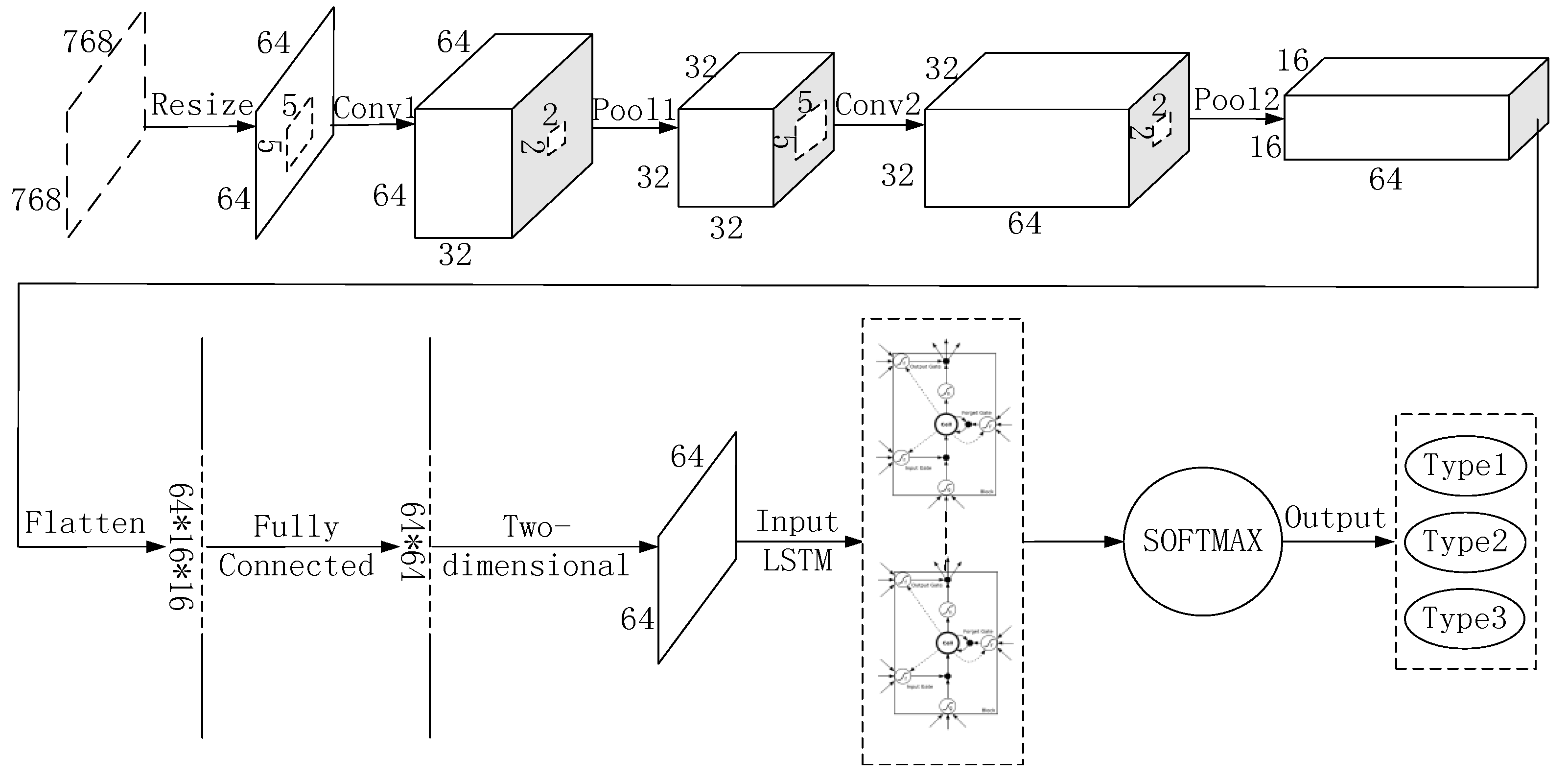
The CNN–LSTM algorithm is designed for the recognition task of a single image. Since CNN’s feature extraction is adaptive and self-learning, our model can overcome the reliance of feature extraction and data reconstruction relying on human experience and subjective consciousness in traditional recognition algorithms. It uses multiple convolutional kernels to scan the entire molten pool image to obtain redundant features of all objects as candidates. In the feature hybrid stage, the three-dimensional feature tensor output from the last layer of CNN is firstly stretched into a one-dimensional feature vector. As mentioned earlier, this vector has all feature information extracted by convolutional kernels, which includes some blank information, similar information, unnecessary information, and so on. Then the feature vector is mapped to two-dimensional space as the input of LSTM. Each row of the feature matrix is considered as a basic unit to be hybridized. Each time step reads a row of feature information and divides a feature matrix into several time steps to read. In this way, the single image of molten pool is converted into “sequential” data in this sense. The LSTM network is used to extract the dependencies between each row of feature matrix, so as to filter and hybridize the features extracted from the CNN network.
Figure 2 shows the innovation of the CNN–LSTM network. In the time interval of the CNN–LSTM network identification molten pool image, the input of LSTM network at time
t includes the output
ht−1 and unit state
ct−1 at time
t − 1, and the network’s input
xt of current time. The feature tensor and the cell state can be filtered and hybridized by three carefully designed threshold structures, so that the effective features extracted from the CNN can be stored in cell state for a long time and the invalid features are forgotten.
3. Model Implementation and Parameter Details
3.1. Model Implementation Process
It can be seen from
Figure 1 that this algorithm is mainly divided into feature extraction stage based on CNN and feature fusion stage based on LSTM. In the feature extraction stage, the forward propagation process of the image signal is as follows: it is assumed that the
l layer is a convolutional layer, and the
l − 1 layer is a pooling layer or an input layer. Then the calculation formula of the
l layer is:
The on the left of the above equation represents the jth feature image of the l layer. The right side shows the convolution operation and summation for all associated feature maps of the l − 1 layer and the jth convolutional kernel of the lth layer, and then adds an offset parameter, and finally passes the activation function f(*). Among them, l is the number of layers, f is the activation function, Mj is an input feature map of the upper layer, b is offset, and k is convolutional kernel.
Assuming that the
l layer is pooling layer (down sampling layer), the
l − 1 layer is the convolutional layer. The formula for the
l layer is as follows:
In the above formula, l is the number of pooling layer, f is the activation function, down(*) is the down sampling function; β is the down sampling coefficient, and b is the offset.
In the feature hybrid stage, the network uses three threshold structures to control the state of the cell that preserves long-term memory. The meaning of long short-term memory is:
ct corresponds to long-term memory, and
corresponds to short-term memory. The σ(*) in Expressions (3), (4), and (7) is a Sigmoid function. If the output of Sigmoid function is 1, then the information is fully remembered. If the output is 0, then it is completely forgotten. If the output is the value between 0 and 1, it is the proportion of information to be remembered. The gate is actually equivalent to a fully connected layer and its input is a vector and output is a real vector between 0 and 1. It uses the output vector of the “gate” multiplied by the vector we want to control. The forgetting gate
ft determines how much historical information can be remained in a long-term state
ct;
is used to describe the short-term state of current input. The input gate
it determines how much of the current network input information can be added to the long-term state
ct; the output gate
ot controls how much of the aggregated information is available as the current output. The expressions are as follows:
The above are the formulas of the forward propagation process of the image signal. “” means matrix multiplication, and “” means multiplication by elements of the same position. The output of the last time step of the LSTM network includes current unit state c64 and current output h64. We take h64 as the overall output of the LSTM part, which is the input of SOFTMAX. After the signal passed through the SOFTMAX, the judgment of the category is given in the form of probability. In the algorithm training stage, the network adopts the error back propagation method to iteratively update the weights and offsets until the number of epochs is reached.
3.2. Model Parameter Details
Tensorflow is a deep learning framework developed by Google. It provides a visual tool Tensorboard that can display the learning process of algorithms. In order to realize the CNN–LSTM algorithm proposed in this paper, the relevant hyper-parameters under this deep learning framework are set as follows: in view of the fact that the gray image of the molten pool taken by the charge coupled device (CCD) camera is too large (768 × 768), it brings great difficulty to the network operation. Therefore, the gray image size is first converted to 64 × 64. In the first convolutional layer (Conv1), there are 32 convolutional kernels with a size of 5 × 5. The convolution stride is 1, and the padding method is same to ensure that the image size is unchanged after convolution. At this time, the image data is converted to 64 × 64 × 32. The first pooling layer (Pool1) uses the maximum pooling. The pooling window with a size of 2 × 2, the pooling stride is 1, and the padding method is same. At this time, the image data is converted to 32 × 32 × 32. In the second convolution layer (Conv2), there are 64 convolution kernels with a size of 5 × 5. The convolution stride is 1, and the padding method is same. At this time, the image data is converted to 32 × 32 × 64. The second pooling layer (Pool2) uses the maximum pooling. The pooling window with a size of 2 × 2, the pooling stride is 1, and the padding method is same. At this time, the image data is converted to 16 × 16 × 64. The fully connected layer adjusts the feature matrix to 64 × 64, and each time step takes one row as the input to the LSTM network. There are 64 time steps in the total. There are 100 hidden units in the LSTM network. Finally, the classification results of defects are obtained through SOFTMAX. In addition, the learning rate of this network is set to 10−4, and Adam is chosen as the optimizer.
Considering the small sample size, in order to prevent overfitting and reduce the amount of calculation, the first layer convolution result, the second layer convolution result and the fully connected layer result all use ReLU (Rectified Linear Units) activation function: ReLU(x) = max(0,x), which is shown in
Figure 3. The ReLU activation function is more expressive than the linear function. The convergence rate of ReLU is faster than that of nonlinear activation functions such as Sigmoid and Tanh. Moreover, since the derivative of ReLU activation function is equal to 1, it can help with vanishing gradient problem [
31,
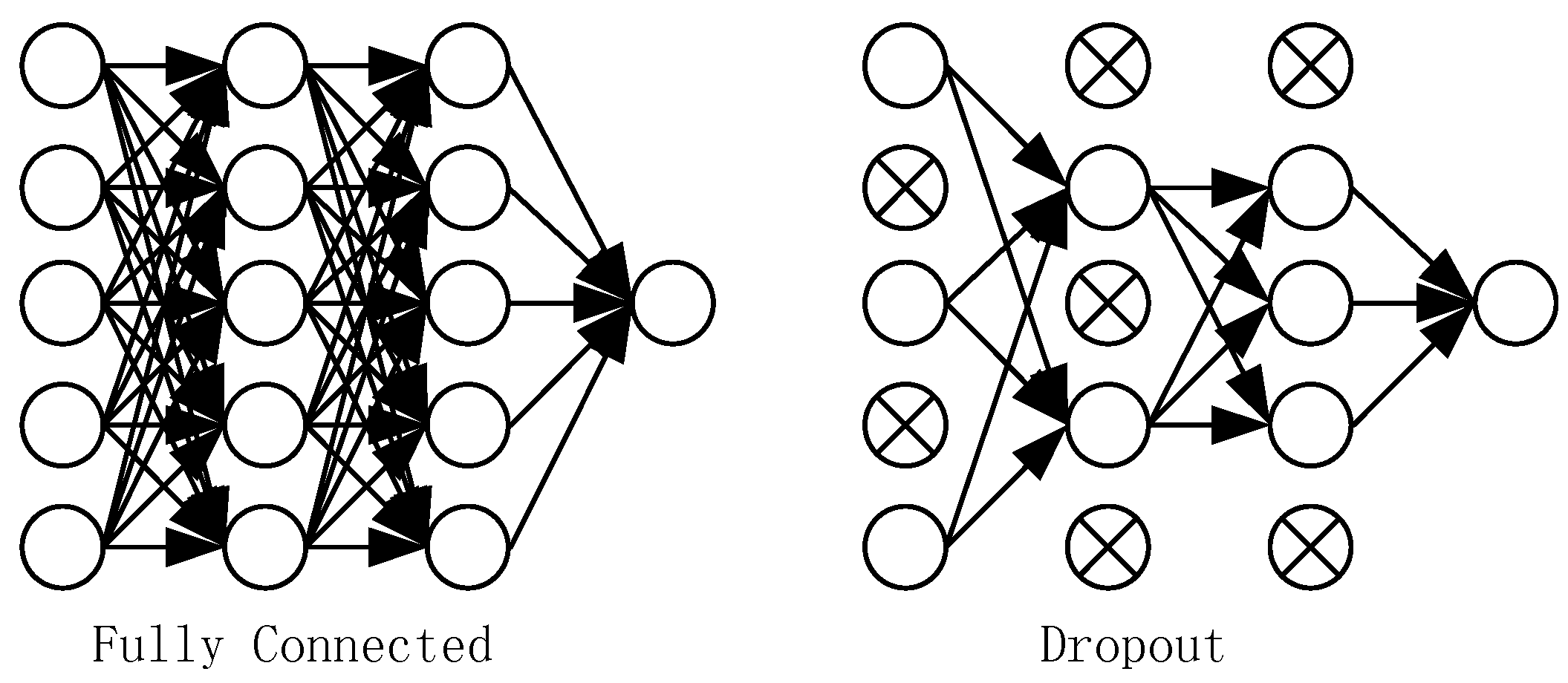
32]. In order to further reduce the possibility of overfitting caused by the small sample size, a random dropout method is used in the fully connected layer which is shown in
Figure 4. Some neurons are stochastically deactivated at each epoch. Dropout decreases the dependencies between nodes and reduce overfitting by turning the CNN into an ensemble classifier of many weak classifiers. The dropout parameter is set to 0.5 in our model.
4. Test Design and Environment
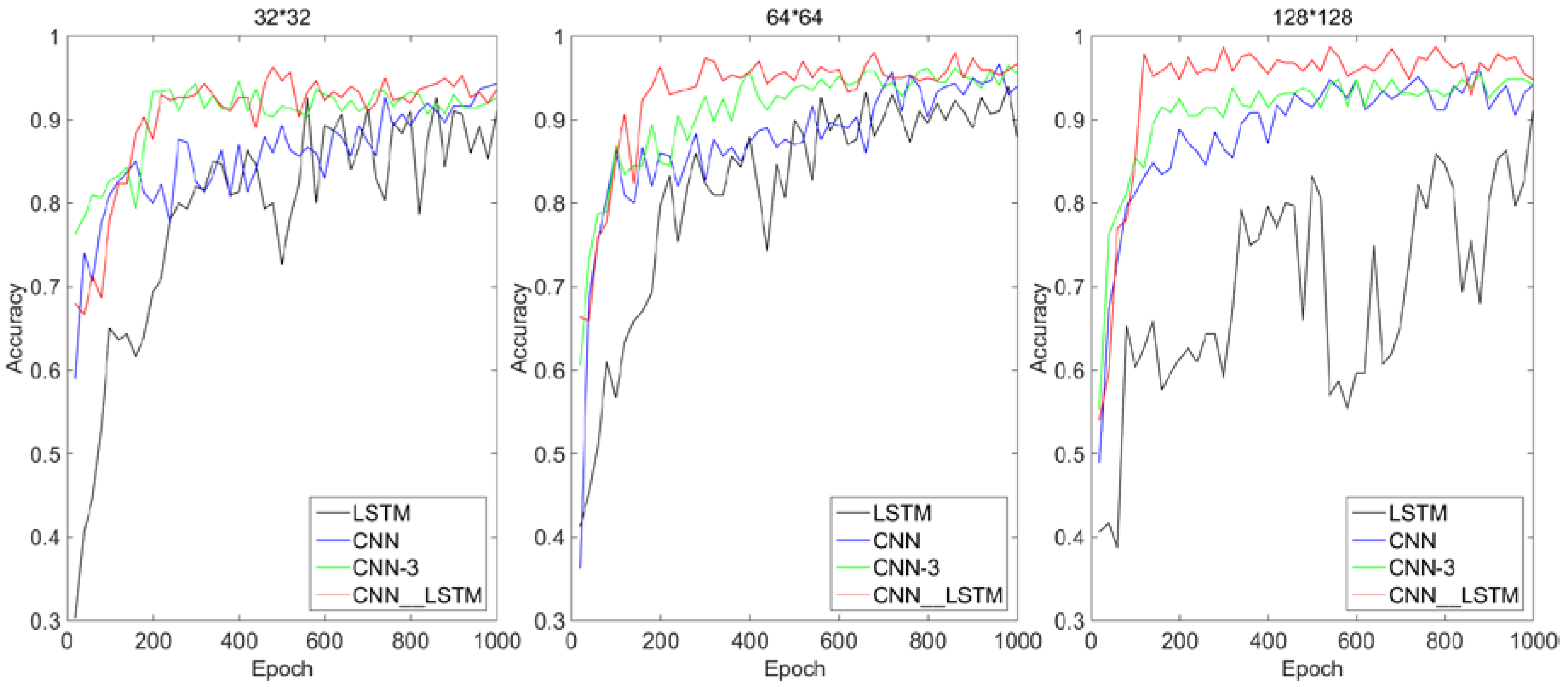
4.1. Test Design
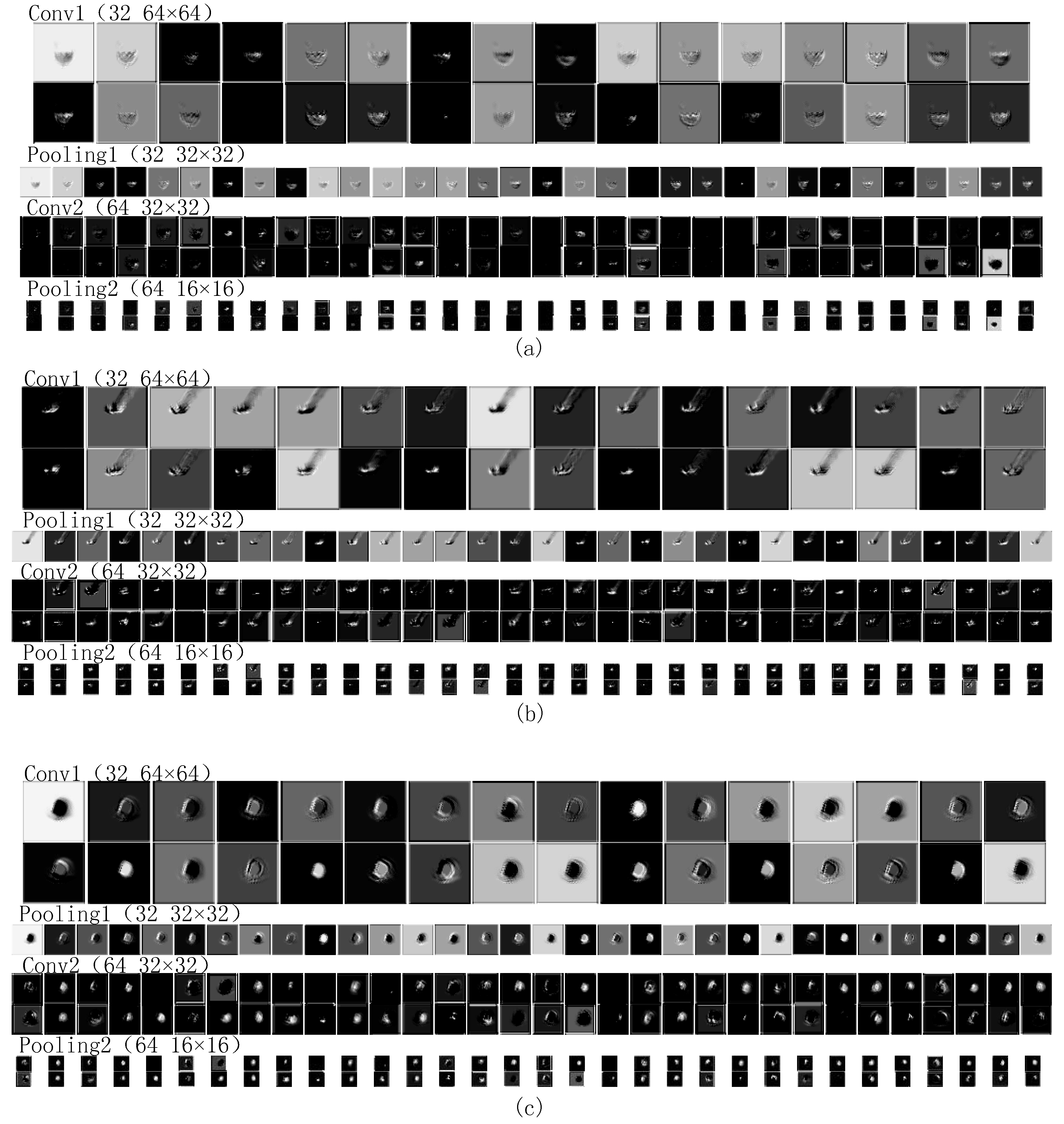
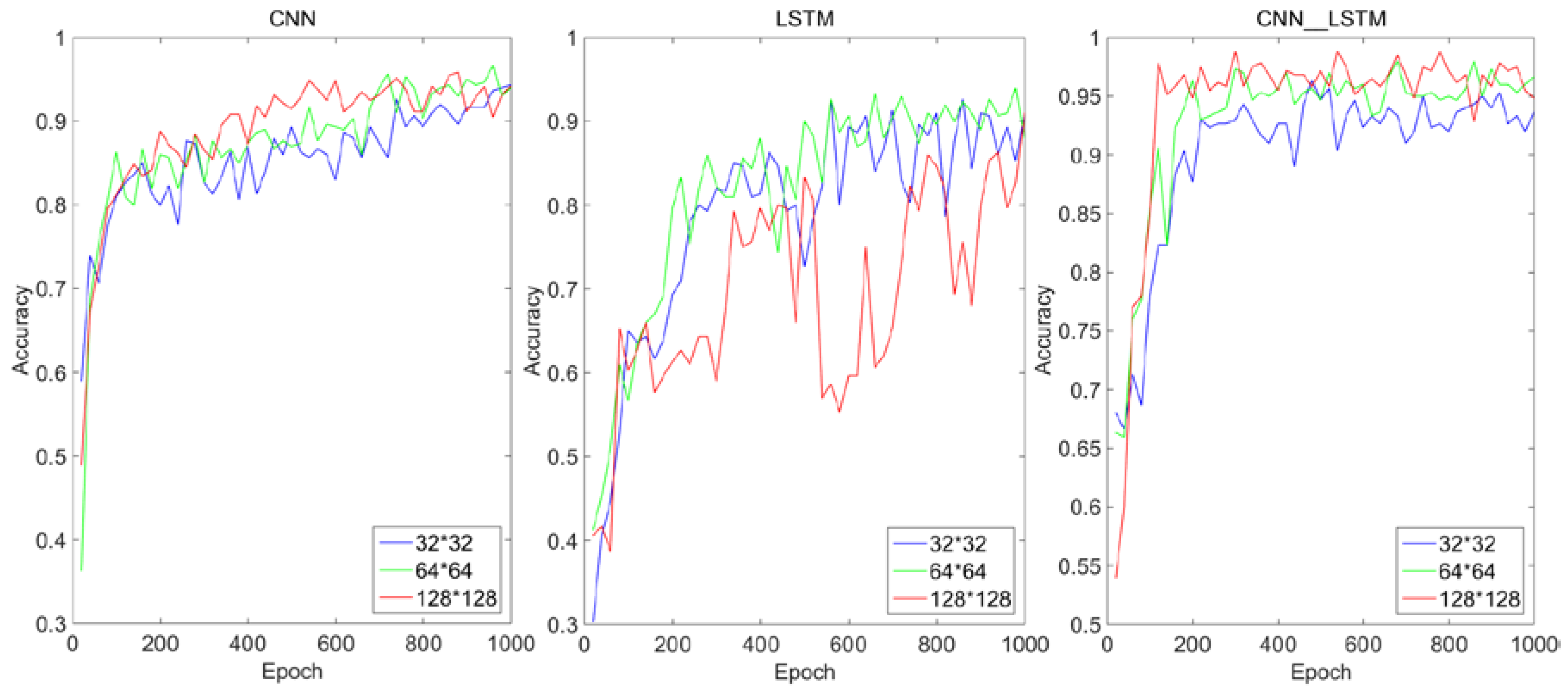
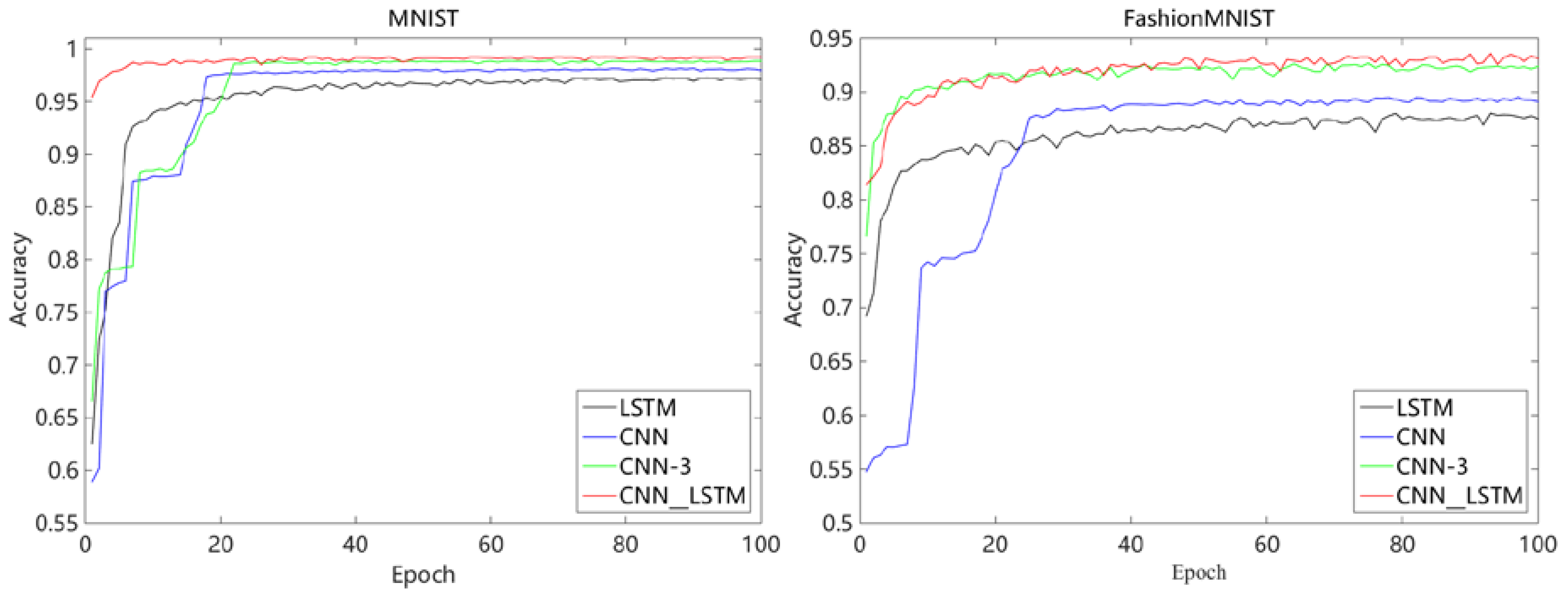
First of all, in order to help understand the mechanism of feature extraction and evolution of the algorithm, the operation results of each convolution and pool layer will be visualized. Secondly, in order to show the feasibility and generalization ability of CNN–LSTM algorithm, the training performance and testing performance will be compared. The size of the original image was converted into 32 × 32, 64 × 64, and 128 × 128 as the initial input. The contribution source of the feasibility of the algorithm was illustrated by the influence of different input sizes on the composition algorithm. Among the tasks related to image feature extraction, CNN has been widely proved to be superior to traditional algorithms. Therefore, in order to fully reflect the superiority of the algorithm and illustrate the contribution sources of the superiority, performance comparison tests were conducted under the same hyper-parameters with the composition algorithm (CNN, LSTM) and CNN-3 (add a convolution and pooling layer, respectively). Finally, in order to illustrate the versatility of the CNN–LSTM algorithm, the performance of the algorithm was tested on the MNIST and FashionMNIST datasets in
Appendix A.
In addition, in order to guarantee the fairness of the comparison test, other hyper-parameters such as convolution kernel size, pool window size, stride, network learning rate, activation function, optimizer, dropout value, LSTM’s hidden layer unit number, etc., were set to be same. The algorithm was analyzed and compared using three criteria: recognition accuracy, convergence speed, and recognition time.
4.2. Test Environment
In terms of data sources, this paper relies on the key laboratory of Robotics and Welding Technology of Guilin University of Aerospace Technology to carry out the CO
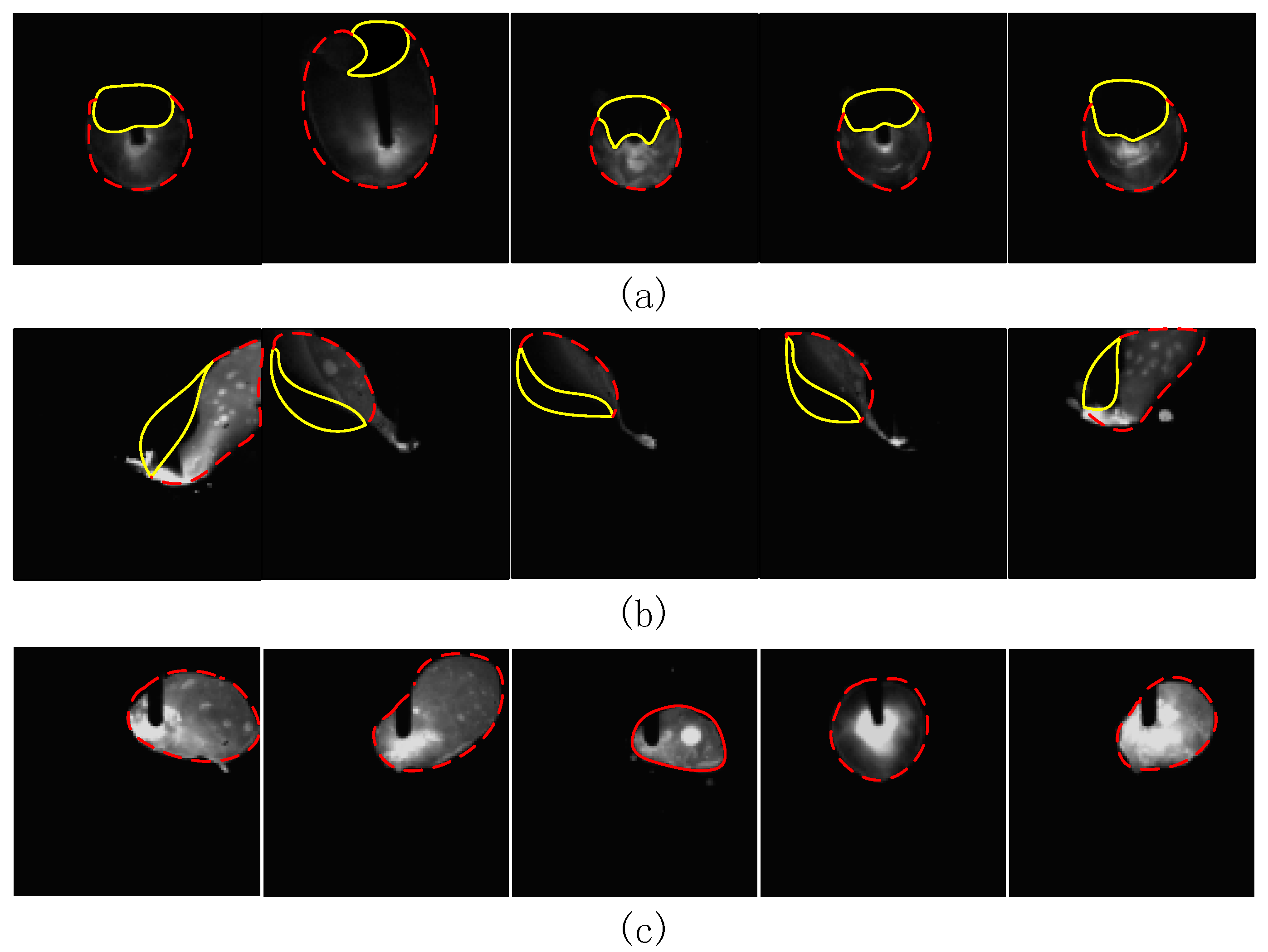
2 welding test. In the actual welding process, welding defects are caused by a variety of factors and have great uncertainty. Through pre-processing, a total of 500 molten pool images of the three most common types of welding including welding through, welding deviation, and normal welding were collected. The original size of the images were 768 × 768. There were 300 pictures per class in the training set and 100 pictures in each class in the validation set and testing set. The tail of the molten pool corresponding to the welding through defect will leak to the back of the base metal and appear as a shadow on the image (
Figure 5a, yellow area). Welding through defects are mainly caused by the welding current being too large, welding speed being too slow, the base material too thin, the base material not uniform, and so on. The weld pool corresponding to the weld deviation defect will deviate from the predetermined weld seam. Welding deviation defects are mainly caused by the vibration of the walking mechanism, the low accuracy of the positioning, the instability of the arc, and so on. At this point, the molten pool will deviate from the predetermined weld, which is reflected in the image as a part missing from the molten pool (
Figure 5b, yellow area). A normal molten pool has an elliptical shape.
Figure 5 shows a partial picture of the sample set.
The algorithm performs performance tests under the ubuntu16.04 operating system, a GTX1080Ti graphics card, a hardware environment of 64 GB running, and the Tensorflow deep learning framework.
6. Discussion
In order to meet the engineering requirements of high accuracy and real time in welding in an online monitoring process, a CNN–LSTM algorithm was proposed based on the traditional deep learning method. The original input of the model is a single image, and the LSTM network processes the feature map extracted by CNN instead of the original sequence, as in the literature. The motivation for using LSTM in this paper was to intelligently fuse the feature information that CNN has extracted, rather than to extract the dependencies between each individual in the sequence. The feasibility of the algorithm is based on using multiple convolution kernels to scan the whole image to obtain the redundant features of the molten pool. The hybrid algorithm was designed in such a way that the rows of the feature matrix extracted by CNN are considered as the basic units and put into the LSTM network for a feature hybrid. The algorithm has high accuracy and short time to identify defects in the molten pool, which completely meets the need of online monitoring in the molten pool. The experiment on the self-made molten pool image dataset shows that the contribution of the feasibility of the algorithm is more derived from the CNN’s feature adaptive extraction capability. However, the superiority of the algorithm is derived from using LSTM in the feature hybrid stage, which filtered and hybridized the feature tensor extracted by CNN in rows. The successful application of the CNN–LSTM algorithm on the MNIST and FashionMNIST datasets show that the motivation of this algorithm is universal when dealing with similar non-strict sequential image data.
Although the feature hybrid method in the CNN–LSTM algorithm is superior to the traditional methods, there are still some shortcomings. In future research work, we should first consider obtaining more defect types and sample sets of molten pool. Secondly, the choice of hyper-parameters should be fully studied in the process of network construction. Thirdly, welding quality should be used as a bridge to establish a corresponding model between the welding process and the weld pool defects. Finally, a feedback control model should be established between the monitoring results of the molten pool and the welding process to realize online monitoring of the welding process based on the molten pool.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








