Integrating Moving Platforms in a SLAM Agorithm for Pedestrian Navigation


Abstract
1. Introduction
1.1. System Overview
1.2. Related Work
2. Bayesian Derivation
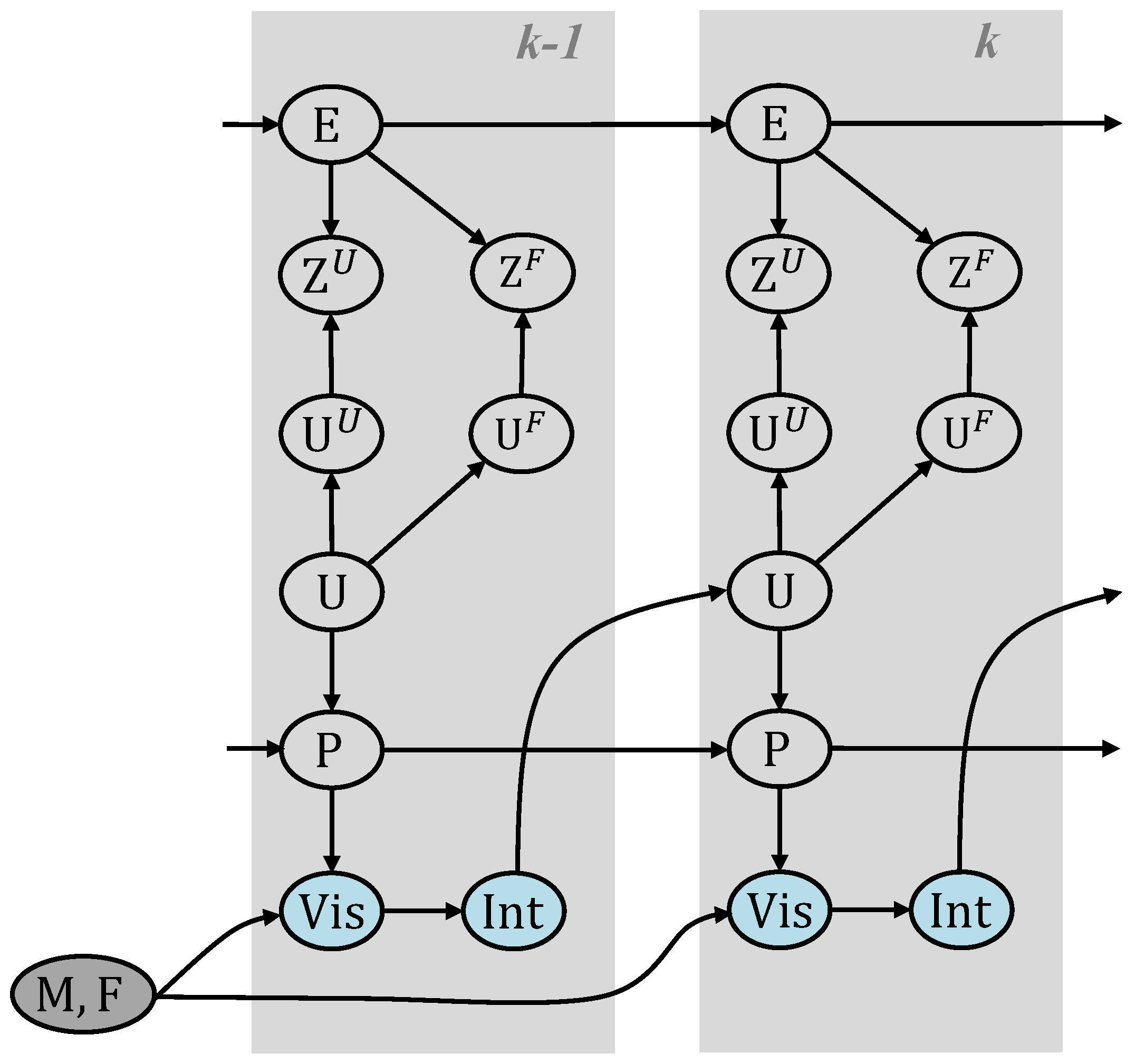
2.1. Dynamic Bayesian Network Representation
2.2. Particle Filter Implementation
2.2.1. Proposing Particle State Propagation
FootSLAM Proposal Density
Moving Platform Proposal Density
2.2.2. Computing Particle Weights
FootSLAM Weight Update
Feature Weight Update
2.3. Moving Platform Detection
3. Experimental Results
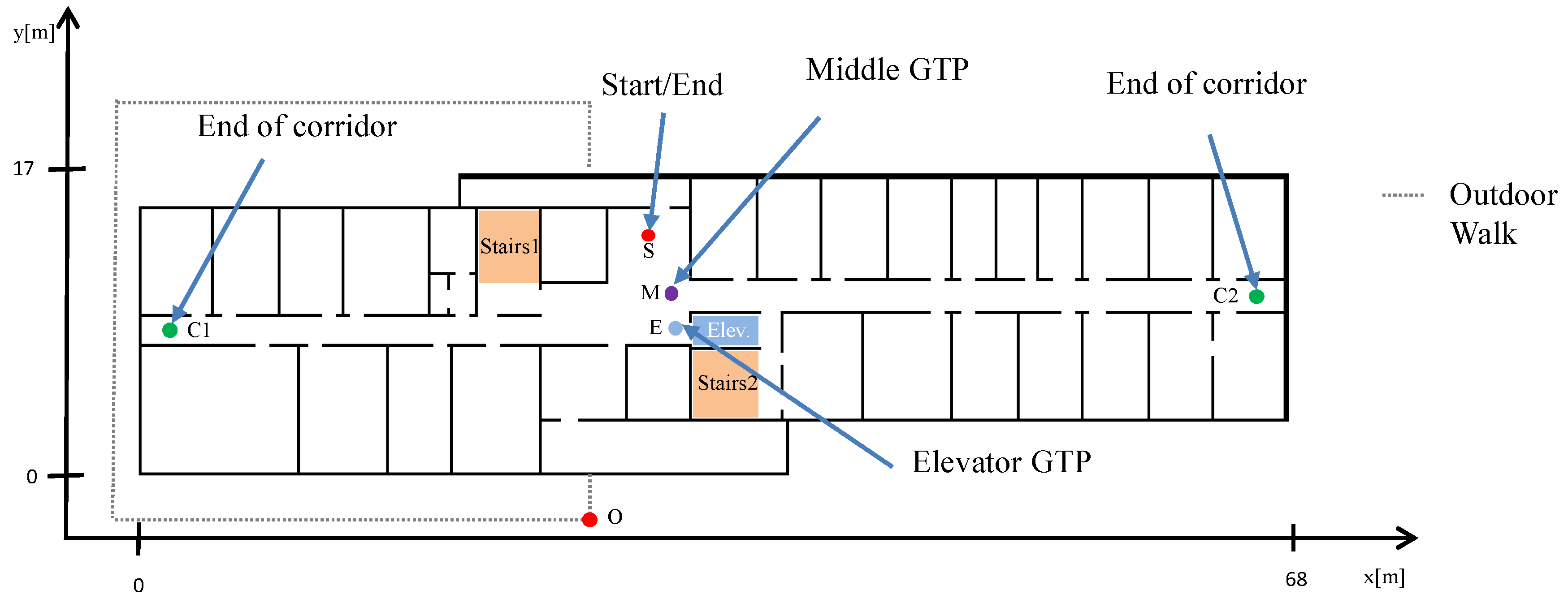
3.1. Experimental Settings
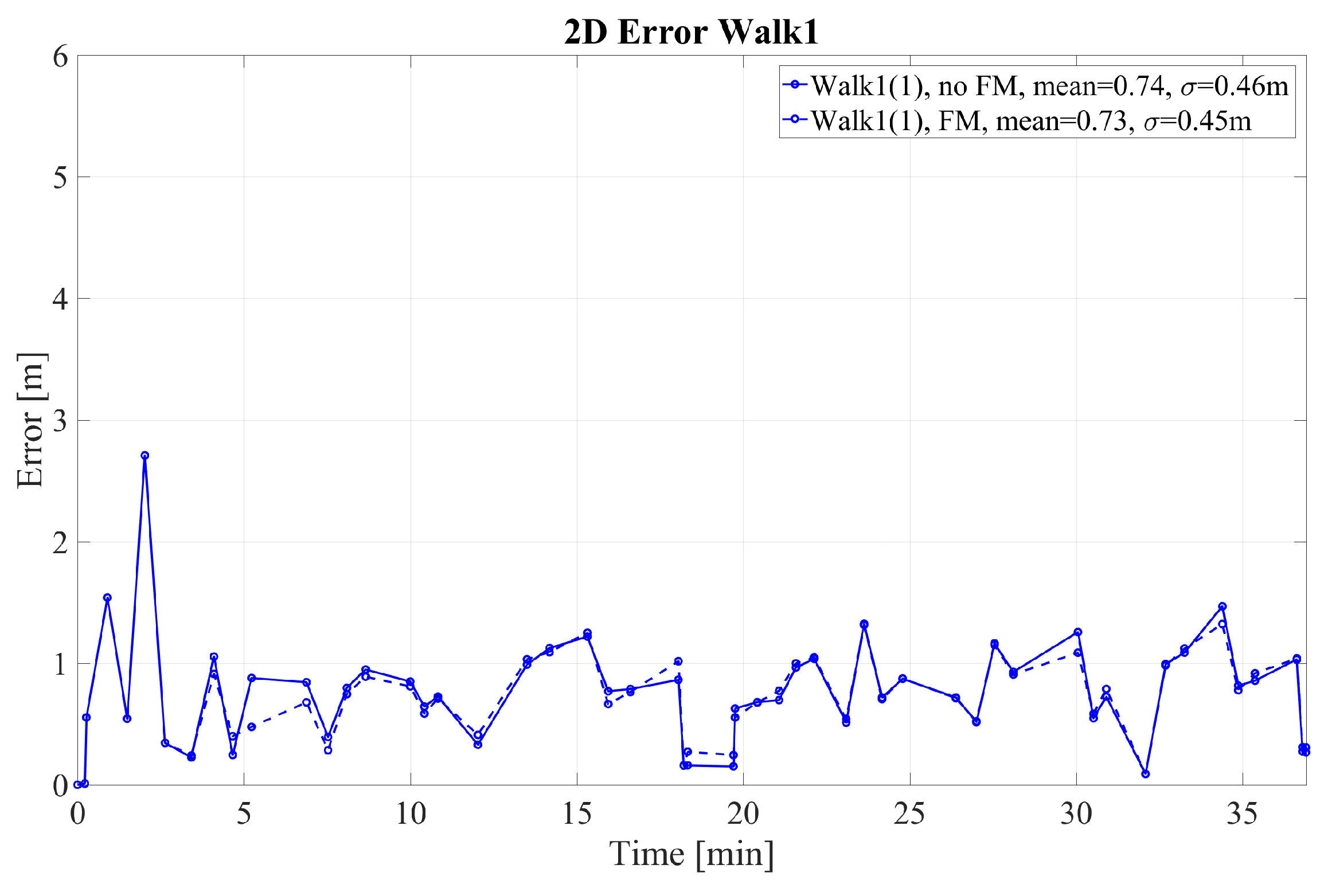
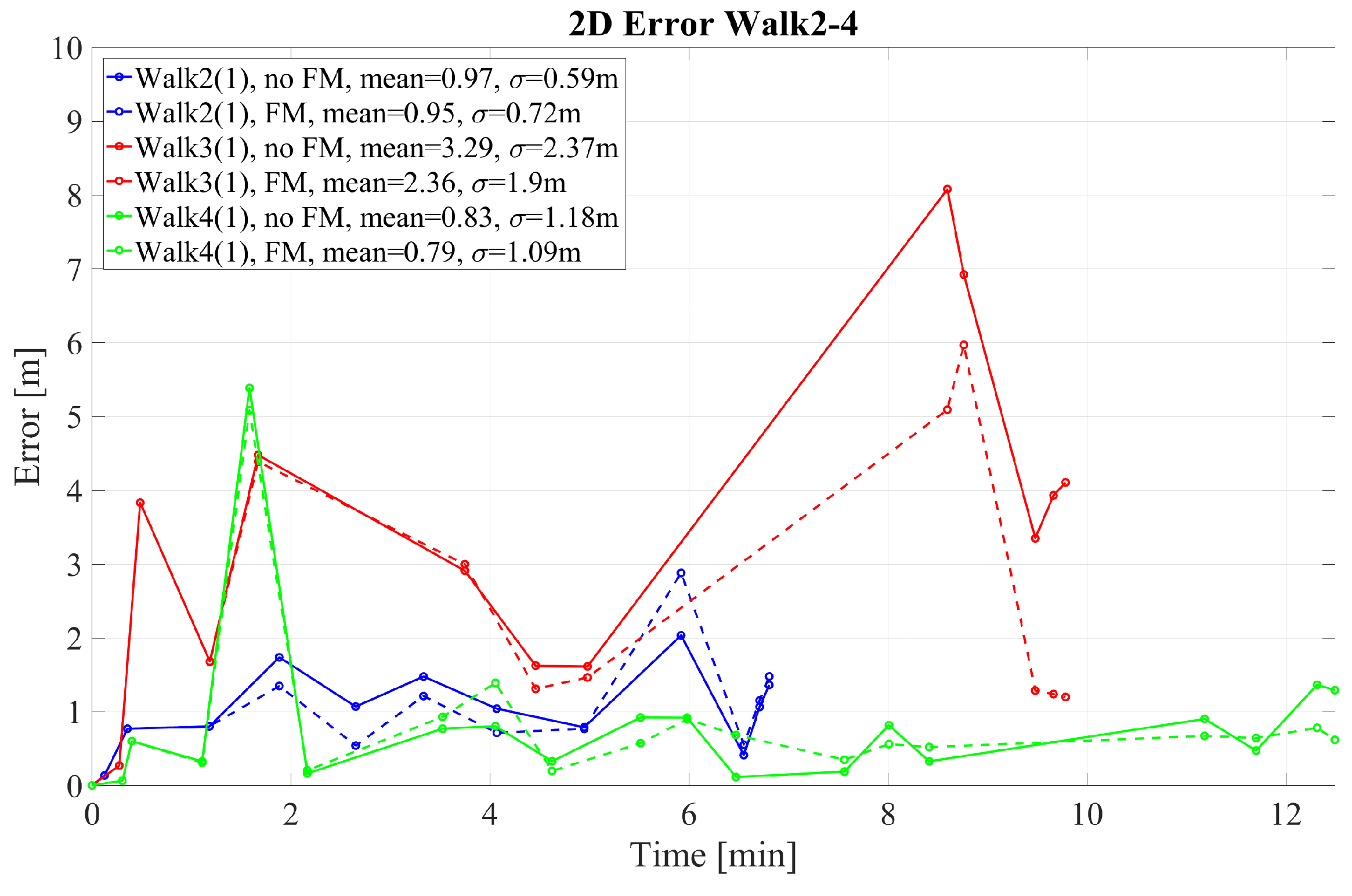
3.2. Experimental Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DLR | German Aerospace Center |
| DLR-KN | Institute of Communication and Navigation at the german aerospace center |
| IMU | inertial measurement unitt |
| INS | inertial navigation system |
| PDR | pedestrian dead-reckoning |
| GNSS | global navigation satellite system |
| UKF | unscented Kalman filter |
| MEMS | micro-mechanical systems |
| SHS | step-and-heading system |
| PF | particle filter |
| RBPF | Rao-Blackwellized particle filter |
| AMM | activity map matching |
| ZUPT | zero velocity update |
| ZARU | Zero Angular Rate Updat |
| MARU | Magnetic Angular Rate Update |
| HMM | hidden Markov model |
| ISA | International Standard Atmosphere—a norm for an atmospheric model used by the US Air Force |
| baro-IMU | inertial measurement unit equipped with a barometric pressure sensor |
| MPD | moving platform detection |
| SIR | Sampling Importance Resampling |
| probability density function | |
| CDF | cumulative distribution function |
| DBN | dynamic Bayesian network |
| SLAM | simultaneous localization and mapping |
| MP | moving platform |
| FM | feature map |
| MP(MPs) | moving platforms |
| IMU(IMUs) | inertial measurement units |
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Mautz, R. Indoor Positioning Technologies. Habilitation Thesis, ETH Zürich, Zurich, Switzerland, 2012. [Google Scholar]
- Harle, R. A Survey of Indoor Inertial Positioning Systems for Pedestrians. Commun. Surv. Tutor. IEEE 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Correa, A.; Barcelo, M.; Morell, A.; Vicario, J. A Review of Pedestrian Indoor Positioning Systems for Mass Market Applications. Sensors 2017, 17, 1927. [Google Scholar]
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Zampella, F.; Khider, M.; Robertson, P.; Jimenez, A. Unscented Kalman Filter and Magnetic Angular Rate Update (MARU) for an Improved Pedestrian Dead-Reckoning. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012. [Google Scholar]
- Jimenez, A.; Seco, F.; Prieto, C.; Guevara, J. A comparison of Pedestrian Dead-Reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the WISP 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 37–42. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous Localization and Mapping: Part I. Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Bailey, T.; Durrant-Whyte, H. Simultaneous Localization and Mapping: Part II. Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. FastSLAM: A factored solution to the simultaneous localization and mapping problem. In Proceedings of the Eighteenth National Conference on Artificial Intelligence, Edmonton, AB, Canada, 28 July–1 August 2002. [Google Scholar]
- Grisetti, G.; Kummerle, R.; Stachniss, C.; Burgard, W. A tutorial on graph-based SLAM. IEEE Intel. Transp. Syst. Mag. 2010, 2, 31–34. [Google Scholar] [CrossRef]
- Abdelnasser, H.; Mohamed, R.; Elgohary, A. SemanticSLAM: Using Environment Landmarks for Unsupervised Indoor Localization. IEEE Trans. Mob. Comput. 2016, 15, 1770–1782. [Google Scholar] [CrossRef]
- Mirowski, P.; Ho, T.; Yi, S.; MacDonald, M. SignalSLAM: Simultaneous Localization and Mapping with Mixed WiFi, Bluetooth, LTE and Magnetic Signals. In Proceedings of the IEEE Indoor Positoning and Indoor Navigation Conference (IPIN), Montbeliard, France, 28–31 October 2013. [Google Scholar]
- Hardegger, M.; Roggen, D.; Tröster, G. 3D ActionSLAM: Wearable person tracking in multi-floor environments. Pers. Ubiquitous Comput. 2015, 19, 123–141. [Google Scholar] [CrossRef]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans. Comput. Vis. Appl. 2017, 9. [Google Scholar] [CrossRef]
- Robertson, P.; Angermann, M.; Krach, B. Simultaneous Localization and Mapping for Pedestrians using only Foot-Mounted Intertial Sensors. In Proceedings of the International Joint Conference on Pervasive and Ubiquitous Computing (Ubicomp), Orlando, FL, USA, 30 September–3 October 2009. [Google Scholar]
- Angermann, M.; Robertson, P. Footslam: Pedestrian simultaneous localization and mapping without exteroceptive sensors—Hitchhiking on human perception and cognition. Proc. IEEE 2012, 100, 1840–1848. [Google Scholar] [CrossRef]
- Kaiser, S.; Munoz Diaz, E. PocketSLAM based on the Principle of the FootSLAM Algorithm. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS), Gothenburg, Sweden, 22–24 June 2015. [Google Scholar]
- Robertson, P.; Frassl, M.; Angerman, M.; Doniec, B.; Garcia Puyol, M.; Khider, M.; Lichtenstein, M.; Bruno, L. Simultaneous Localization and Mapping for Pedestrians using Distortions of the Local Magnetic Field Intensity in Large Indoor Environments. In Proceedings of the IEEE Indoor Positoning and Indoor Navigation Conference (IPIN), Montbeliard, France, 28–31 October 2013. [Google Scholar]
- Bruno, L.; Robertson, P. WiSLAM: Improving FootSLAM with WiFi. In Proceedings of the IEEE Indoor Positioning and Indoor Navigation Conference (IPIN), Guimaraes, Portugal, 21–23 September 2011. [Google Scholar]
- Robertson, P.; Angermann, M.; Khider, M. Improving simultaneous localization and mapping for pedestrian navigation and automatic mapping of buildings by using online human-based feature labeling. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Indian Wells, CA, USA, 4–6 May 2010. [Google Scholar]
- Doucet, A.; De Freitas, N.; Murphy, K.; Russell, S. Rao-Blackwellised particle filtering for dynamic Bayesian networks. In Proceedings of the Sixteenth Conference on Uncertainty in Artificial Intelligence, San Francisco, CA, USA, 30 June–3 July 2000; pp. 176–183. [Google Scholar]
- Garcia Puyol, M.; Bobkov, D.; Robertson, P.; Jost, T. Pedestrian Simultaneous Localization and Mapping in Multistory Buildings Using Inertial Sensors. IEEE Trans. Intel. Trans. Syst. 2014, 15, 1714–1727. [Google Scholar] [CrossRef]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W.; Zhang, X. Activity Sequence-Based Indoor Pedestrian Localization Using Smartphones. IEEE Trans. Hum. Mach. Syst. 2015, 45, 562–574. [Google Scholar] [CrossRef]
- Kronenwett, N.; Qian, S.; Mueller, K.; Trommer, G. Elevator and Escalator Classification for Precise Indoor Localization. In Proceedings of the IEEE Indoor Positioning and Indoor Navigation Conference (IPIN), Nantes, France, 24–27 September 2018. [Google Scholar]
- Fallon, M.F.; Johannsson, H.; Brookshire, J. Sensor fusion for flexible human-portable building-scale mapping. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 4405–4412. [Google Scholar] [CrossRef]
- Kaiser, S.; Lang, C. Detecting Elevators and Escalators in 3D Pedestrian Indoor Navigation. In Proceedings of the IEEE Indoor Positioning and Indoor Navigation Conference (IPIN), Alcalá de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Kaiser, S. Enhanced Acceleration Phase Tracking. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018. [Google Scholar]
- Ahmed, D.B.; Frank, K.; Heirich, O. Recognition of professional activities with displaceable sensors. In Proceedings of the IEEE 82nd Vehicular Technology Conference, VTC Fall 2015, Boston, MA, USA, 6–9 September 2015. [Google Scholar] [CrossRef]
- Elhoushi, M.; Georgy, J.; Noureldin, A.; Korenberg, M.J. Motion Mode Recognition for Indoor Pedestrian Navigation Using Portable Devices. IEEE Trans. Instrum. Meas. 2016, 65, 208–221. [Google Scholar] [CrossRef]
- Khalifa, S.; Hassan, M.; Seneviratne, A. Feature selection for floor-changing activity recognition in multi-floor pedestrian navigation. In Proceedings of the 7th International Conference on Mobile Computing and Ubiquitous Networking (ICMU), Singapore, 6–8 January 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Lang, C.; Kaiser, S. Classifying Elevators and Escalators in 3D Pedestrian Indoor Navigation. In Proceedings of the IEEE Indoor Positioning and Indoor Navigation Conference (IPIN), Nantes, France, 24–27 September 2018. [Google Scholar]
- Yi, S.; Mirowski, P.; Ho, T.K.; Pavlovic, V. Pose invariant activity classification for multi-floor indoor localization. In Proceedings of the International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; pp. 3505–3510. [Google Scholar] [CrossRef]
- Li, Y.; Wang, J. A Pedestrian Navigation System Based on Low Cost IMU. J. Navig. 2014, 67, 929–949. [Google Scholar] [CrossRef]
- Gusenbauer, D.; Isert, C.; Krösche, J. Self-Contained Indoor Positioning on Off-The-Shelf Mobile Devices. In Proceedings of the IEEE Indoor Positoning and Indoor Navigation Conference (IPIN), Zürich, Switzerland, 15–17 September 2010. [Google Scholar]
- Török, A.; Nagy, A.; Kováts, L.; Pach, P. DREAR-Towards Infrastructure-free Indoor Localization via Dead-Reckoning Enhanced with Activity Recognition. In Proceedings of the 2014 Eighth International Conference on Next Generation Mobile Applications, Services and Technologies, Oxford, UK, 10–12 September 2014. [Google Scholar]
- Khalifa, S.; Hassan, M. Evaluating Mismatch Probability of Activity-based Map Matching in Indoor Positioning. In Proceedings of the IEEE Indoor Positoning and Indoor Navigation Conference (IPIN), Sydney, Australia, 13–15 November 2012. [Google Scholar]
- Török, A.; Nagy, A.; Kálomista, I. TREKIE-Ubiquitous Indoor Localization with Trajectory REconstruction Based on Knowledge Inferred from Environment. In Mobile Web and Intelligent Information Systems, Proceedings of the International Conference on Mobile Web and Information Systems, Rome, Italy, 24–26 August 2015; Springer: Cham, Switzerland, 2015; pp. 15–26. [Google Scholar]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No need to war-drive: Unsupervised indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Ambleside, UK, 25–29 June 2012. [Google Scholar]
- Garcia Puyol, M.; Robertson, P.; Heirich, O. Complexity-reduced FootSLAM for indoor pedestrian navigation using a geographic tree-based data structure. J. Locat. Based Serv. 2013, 7, 182–208. [Google Scholar] [CrossRef]
- Arulampalam, M.; Maskell, S.; Gordon, N.; Clapp, T. A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Safety of escalators and moving walks. In EU-Norm EN 115-1; European Commission: Brussels, Belgium, 2010.
- Kaiser, S.; Garcia Puyol, M.; Robertson, P. Measuring the Uncertainty of Probabilistic Maps Representing Human Motion for Indoor Navigation. Mob. Inf. Syst. 2016, 2016, 9595306. [Google Scholar] [CrossRef]
- Heckerman, D. A Tutorial on Learning with Bayesian Networks; Technical Report; Microsoft Research: Redmond, WA, USA, 1995. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Walk 1 | Walk 2 | Walk 3 | Walk 4 | ||||
|---|---|---|---|---|---|---|---|
| Floor Level | Next Floor | Floor Level | Next Floor | Floor Level | Next Floor | Floor Level | Next Floor |
| Change | Change | Change | Change | ||||
| 2 | elev. up | 2 | elev. down | 0 | elev. up | 2 | elev. down |
| 3 | stairs down | 1 | stairs up | 2 | elev. up | 1 | elev. up |
| 1 | elev. up | 2 | elev. up | 3 | stairs down | 3 | elev. down |
| 4 | stairs down | 3 | stairs down | 0 | elev. up | 0 | elev. up |
| 2 | elev. down | 2 | elev. up | 2 | 4 | elev. down | |
| 0 | stairs up | 4 | elev. down | ||||
| 2 | 2 | stairs down | |||||
| 0 | elev. up | ||||||
| 2 | |||||||
| GTP S | GTP C | GTP M | GTP E | Stairs 1 | Stairs 2 | |
|---|---|---|---|---|---|---|
| Walk 1 | x | 1,2 | x | x | x | |
| Walk 2 | x | x | x | x | x | |
| Walk 3 | x | 1 | x | x | x | |
| Walk 4 | x | 1 | x | x |
| GTPs | |
|---|---|
| Walk 1 | 2S, 2M, 2C2, 2M, 2C1, 2E, 3M, 3C1, 3M, 3C2, 1C2, 1M, 1C1, 1E |
| 4C1, 4M, 4C2, 2M, 2C1, 2E, 0C1, 0M, 0C2, 2M, 2S | |
| Walk 2 | 2S, 2E, 1M, 2E, 3M, 2E, 4M, 4E, 2M, 0M, 0E, 2M, 2S |
| Walk 3 | O, 0E, 2M, 2C1, 2E, 3M, 3C1, 0M, 0E, 2S |
| Walk 4 | 2S, 2E, 1M, 1C1, 1E, 3M, 3C1, 3E, 0M, 0C1, 0E, 4M, 4C1, 4E, 2M, 2C1, 2S |
| Walks 1–3 | |
|---|---|
| Floor Level | Next Floor Change |
| 0 | stairs up |
| 1 | escalator down |
| 0 | elevator up |
| 1 | escalator down |
| 0 | stairs up |
| Walks 1–4(1) | Walks 1–4(2) | |||||||
|---|---|---|---|---|---|---|---|---|
| No FM | FM | No FM | FM | |||||
| 2DE (m) | HE (m) | 2DE (m) | HE (m) | 2DE (m) | HE (m) | 2DE (m) | HE (m) | |
| Walk 1 RTME | 0.74 | 0.09 | 0.73 | 0.11 | 0.88 | 0.09 | 0.88 | 0.09 |
| Walk 2 RTME | 1.16 | 0.4 | 1.26 | 0.5 | 0.7 | 0.06 | 0.63 | 0.07 |
| Walk 3 RTME | 3.41 | 0.45 | 2.91 | 0.45 | 2.3 | 0.12 | 1.84 | 0.13 |
| Walk 4 RTME | 0.84 | 0.09 | 0.86 | 0.1 | 0.84 | 0.55 | 0.88 | 0.64 |
| Walk 1 PM | 0.73 | 0.08 | 0.74 | 0.09 | 0.75 | 0.08 | 0.83 | 0.09 |
| Walk 2 PM | 1.09 | 0.38 | 1.15 | 0.47 | 0.66 | 0.05 | 0.6 | 0.06 |
| Walk 3 PM | 2.33 | 0.41 | 2.12 | 0.41 | 1.54 | 0.1 | 0.84 | 0.09 |
| Walk 4 PM | 0.59 | 0.08 | 0.56 | 0.09 | 0.69 | 0.53 | 0.74 | 0.62 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaiser, S.; Lang, C. Integrating Moving Platforms in a SLAM Agorithm for Pedestrian Navigation. Sensors 2018, 18, 4367. https://doi.org/10.3390/s18124367
Kaiser S, Lang C. Integrating Moving Platforms in a SLAM Agorithm for Pedestrian Navigation. Sensors. 2018; 18(12):4367. https://doi.org/10.3390/s18124367
Chicago/Turabian StyleKaiser, Susanna, and Christopher Lang. 2018. "Integrating Moving Platforms in a SLAM Agorithm for Pedestrian Navigation" Sensors 18, no. 12: 4367. https://doi.org/10.3390/s18124367
APA StyleKaiser, S., & Lang, C. (2018). Integrating Moving Platforms in a SLAM Agorithm for Pedestrian Navigation. Sensors, 18(12), 4367. https://doi.org/10.3390/s18124367