Securing Real-Time Internet-of-Things


Abstract
1. Introduction
2. Real-Time Internet-of-Things: An Overview
2.1. Stringent Timing/Safety Requirements and Resources Constraints
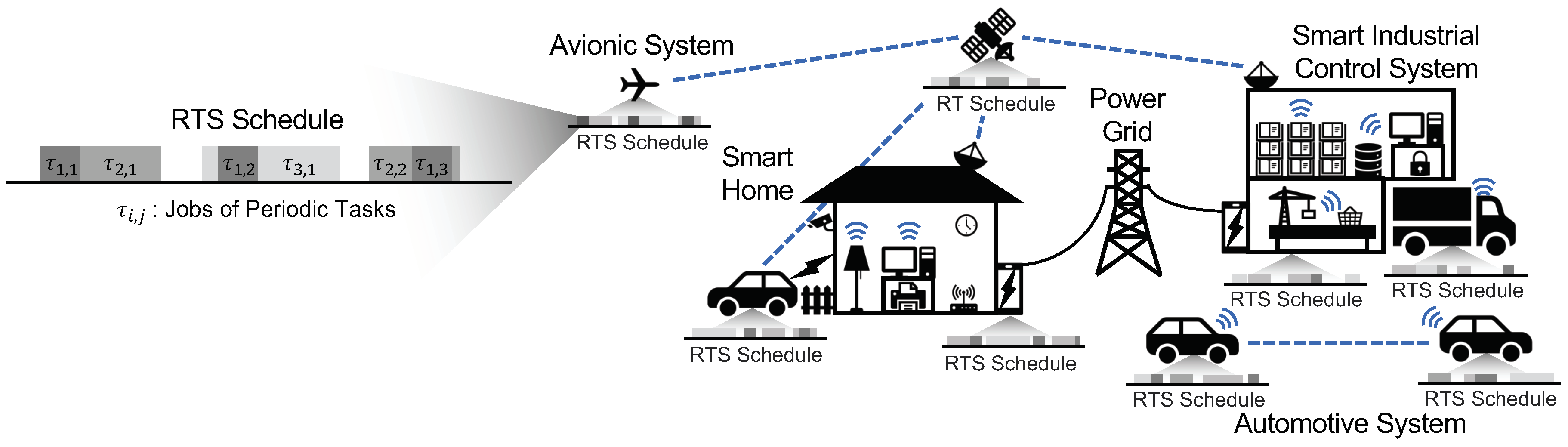
2.2. Heterogeneous Communication Traffic
2.3. Real-Time Scheduling Model
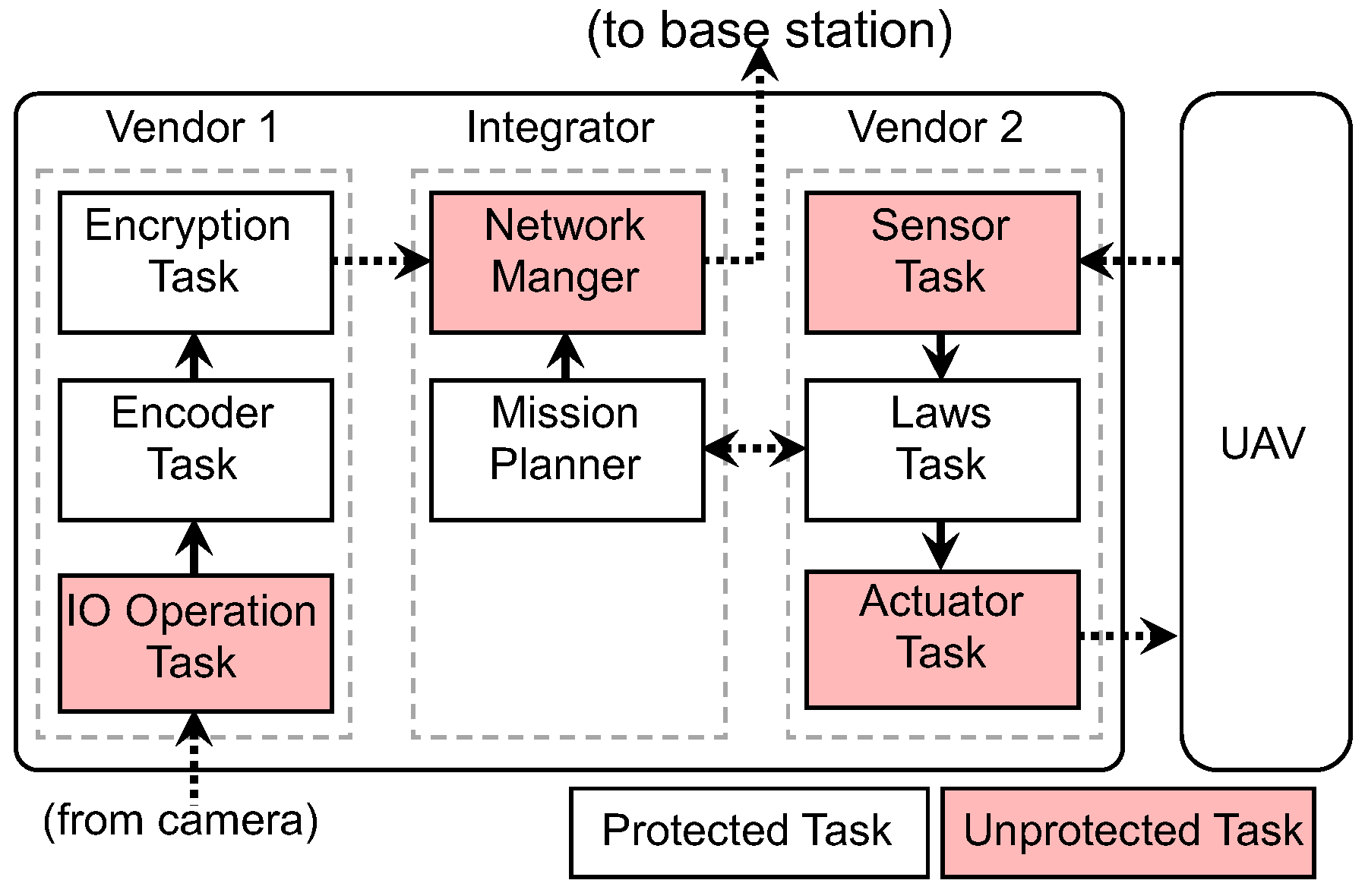
2.4. CPU Architectures and System Development Model
3. Security Threats for RT-IoT
3.1. Attacks on RT-IoT
3.1.1. Integrity Violation with Malicious Code Injection
3.1.2. Side-Channel Attacks
3.1.3. Attacks on Communication Channels
3.1.4. Denial-of-Service (DoS) Attacks
3.2. Reconnaissance: Attack Preparation
3.2.1. ScheduLeak
3.2.2. Targeted Attacks
4. Securing RT-IoT: Host-Based Approaches
4.1. Security with Hardware Support
4.1.1. Secure System Simplex Architecture (S3A)
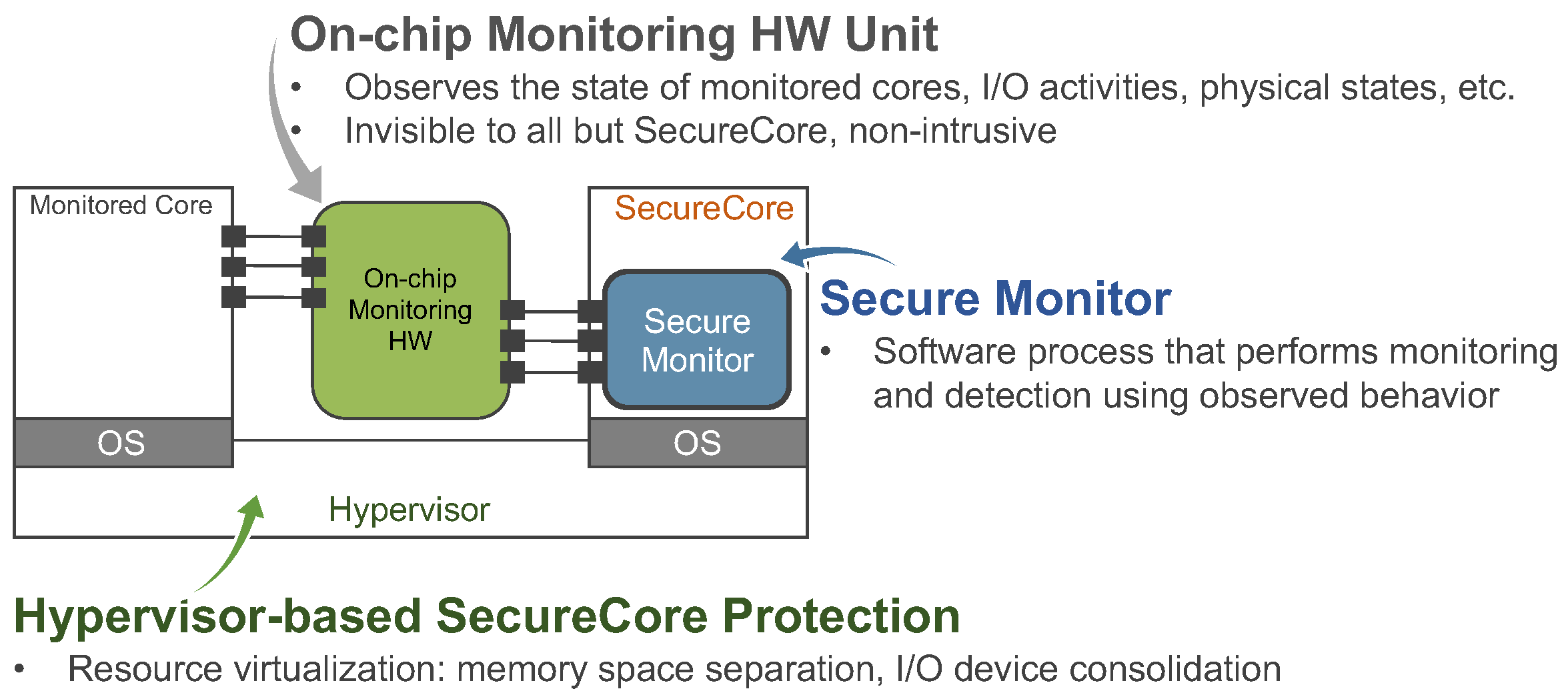
4.1.2. SecureCore Framework
4.1.3. Control Flow Monitoring
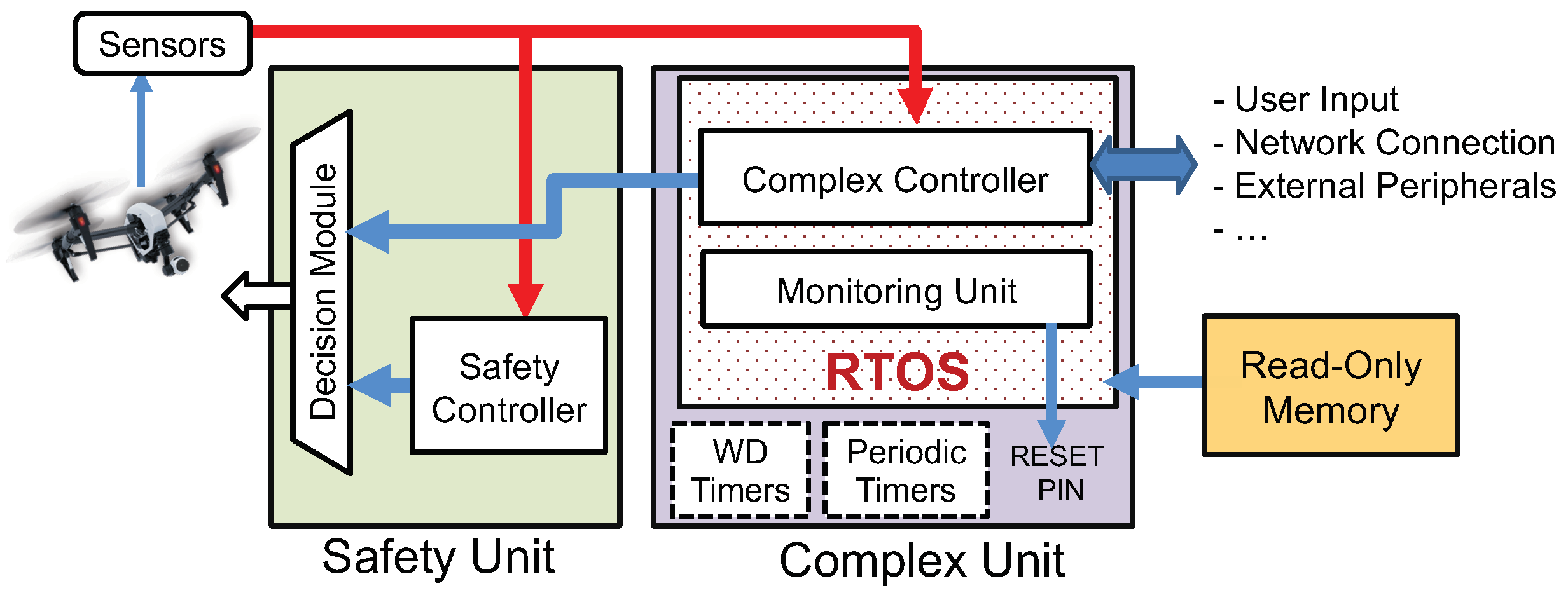
4.1.4. Security via Platform-Level Reset
4.2. Security without Architectural Modifications
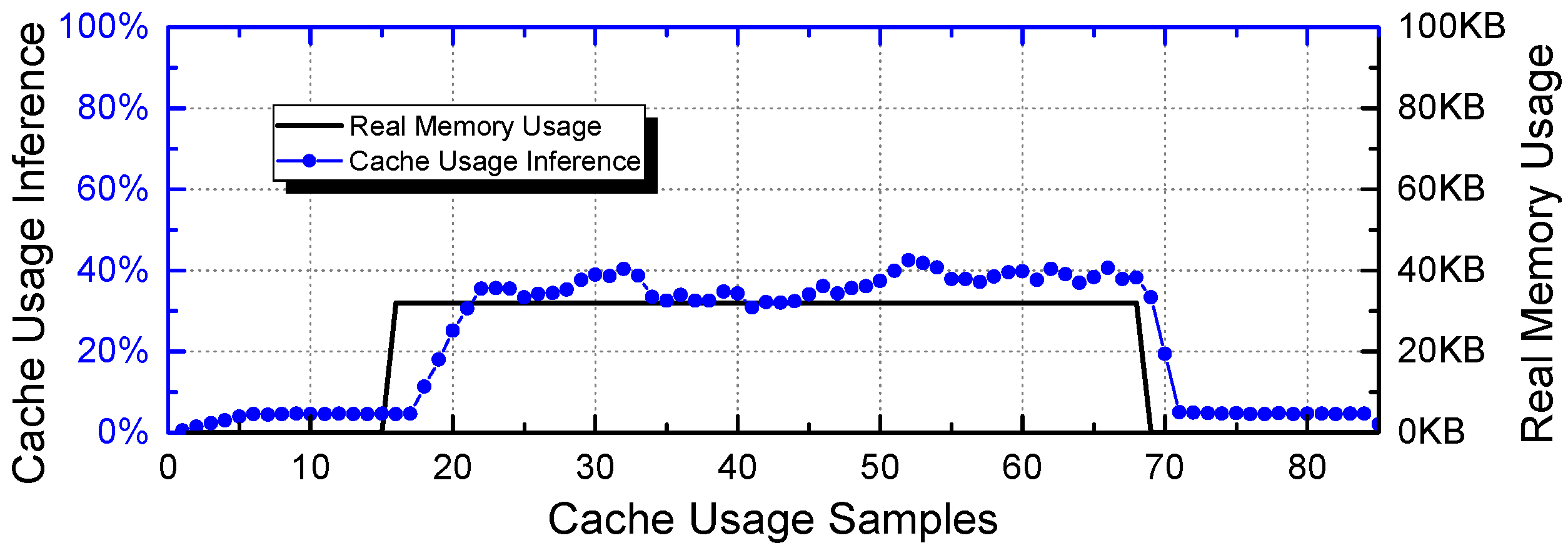
4.2.1. Dealing with Side-Channel Attacks
4.2.2. Schedule Randomization
- Randomization (Task Only): This is the most basic form of randomization in contrast to other schemes introduced below. We randomly pick a task to execute whenever a task arrives or finishes its job, i.e., at the scheduling points. The effectiveness against the schedule-based side-channel attack is limited since the busy intervals in this scheme remains the same.
- Randomization with Idle Time Scheduling: In addition to the randomness provided in the basic scheme, we include the idle task (e.g., the dummy task executed by an RTOS when other real-time tasks are not running) at each scheduling point. It eliminates the periodicity of busy intervals (from hyper-period’s point of view). This scheme makes it harder to produce effective results from the schedule-based side-channel attack.
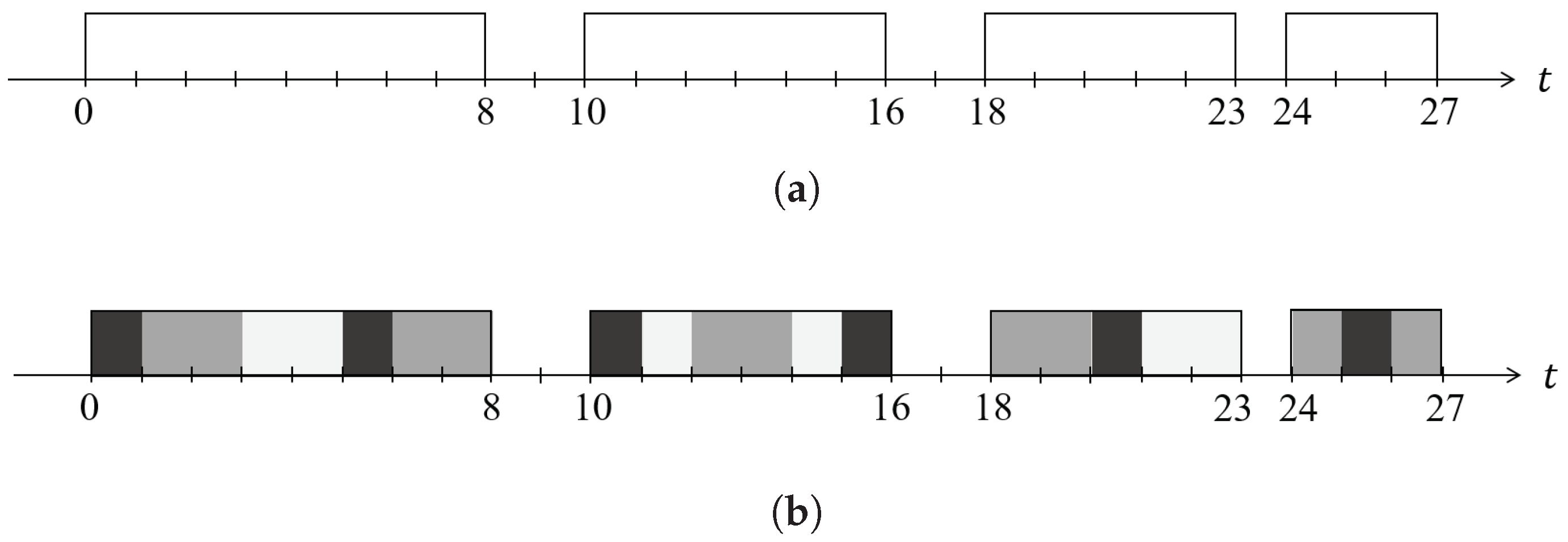
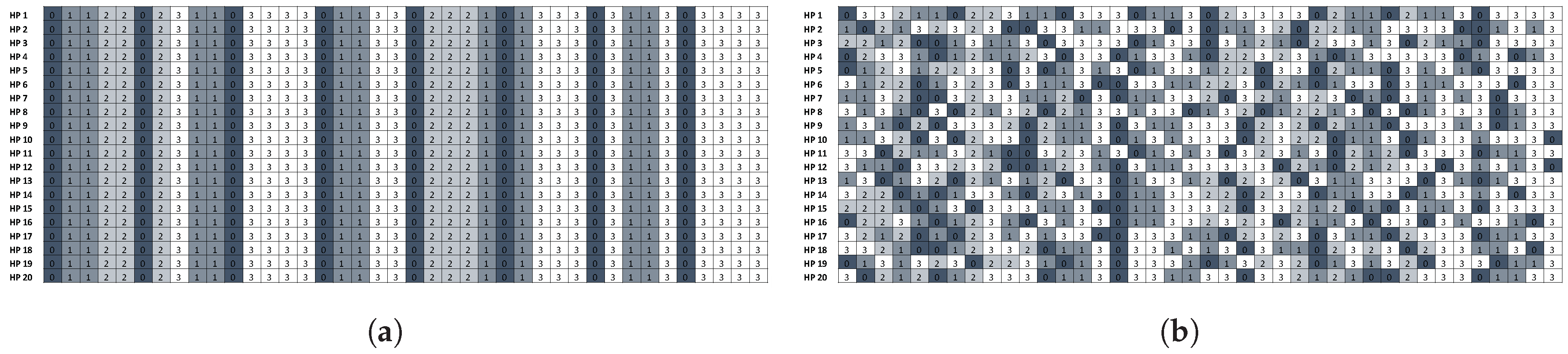
- Randomization with Idle Time Scheduling and Fine-grained Switching: To push the randomization to an extreme, one could choose to randomize the schedule every tick. That is, the scheduler will randomly pick a task to execute, subject to the deadline constraints, in every tick interrupt. This way, we gain the most randomness for the schedule. Figure 8 illustrates an instance of the randomized schedule for an simple taskset with three tasks. However, it greatly increases the overhead and thus may not be applicable for all use cases.
4.2.3. Integrating Security for Legacy RT-IoT
5. Discussion and Research Opportunities
5.1. Securing Legacy RT-IoT Systems
5.2. Security for Multicore based RT-IoT Platforms
5.3. Secure Communication with Timing Constraints
6. Related Work
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kolias, C.; Kambourakis, G.; Stavrou, A.; Voas, J. DDoS in the IoT: Mirai and other botnets. Computer 2017, 50, 80–84. [Google Scholar] [CrossRef]
- Westling, J. Future of the Internet of Things in Mission Critical Applications; SSRN 2016. Available online: https://ssrn.com/abstract=2863204 (accessed on 10 December 2018).
- Falliere, N.; Murchu, L.O.; Chien, E. W32. Stuxnet dossier; White paper; Symantec Corporation: Mountain View, CA, USA, 2011. [Google Scholar]
- Lee, R.M.; Assante, M.J.; Conway, T. Analysis of the cyber attack on the Ukrainian power grid. SANS Ind. Control Syst. 2016. Available online: https://ics.sans.org/media/E-ISAC_SANS_Ukraine_DUC_5.pdf (accessed on 9 December 2018).
- Koscher, K.; Czeskis, A.; Roesner, F.; Patel, S.; Kohno, T.; Checkoway, S.; McCoy, D.; Kantor, B.; Anderson, D.; Shacham, H.; et al. Experimental security analysis of a modern automobile. In Proceedings of the 2010 IEEE Symposium on Security and Privacy, Berkeley/Oakland, CA, USA, 16–19 May 2010; pp. 447–462. [Google Scholar]
- Checkoway, S.; McCoy, D.; Kantor, B.; Anderson, D.; Shacham, H.; Savage, S.; Koscher, K.; Czeskis, A.; Roesner, F.; Kohno, T.; et al. Comprehensive Experimental Analyses of Automotive Attack Surfaces. In Proceedings of the SEC’11 Proceedings of the 20th USENIX conference on Security, San Francisco, CA, USA, 8–12 August 2011. [Google Scholar]
- Clark, S.S.; Fu, K. Recent results in computer security for medical devices. In International Conference on Wireless Mobile Communication and Healthcare; Springer: Berlin/Heidelberg, Germany, 2011; pp. 111–118. [Google Scholar]
- Abrams, M.; Weiss, J. Malicious Control System Cyber Security Attack Case Study–Maroochy Water Services, Australia; The MITRE Corporation: McLean, VA, USA, 2008. [Google Scholar]
- Sadeghi, A.R.; Wachsmann, C.; Waidner, M. Security and privacy challenges in industrial Internet of things. In Proceedings of the 2015 52nd ACM/EDAC/IEEE Design Automation Conference (DAC), San Francisco, CA, USA, 8–12 June 2015; pp. 1–6. [Google Scholar]
- Ida, I.B.; Jemai, A.; Loukil, A. A survey on security of IoT in the context of eHealth and clouds. In Proceedings of the 2016 11th International Design & Test Symposium (IDT), Hammamet, Tunisia, 18–20 December 2016; pp. 25–30. [Google Scholar]
- Weber, R.H. Internet of Things–New security and privacy challenges. Comp. Law Sec. Rev. 2010, 26, 23–30. [Google Scholar] [CrossRef]
- Fink, G.A.; Zarzhitsky, D.V.; Carroll, T.E.; Farquhar, E.D. Security and privacy grand challenges for the Internet of Things. In Proceedings of the 2015 International Conference on Collaboration Technologies and Systems (CTS), Atlanta, GA, USA, 1–5 June 2015; pp. 27–34. [Google Scholar]
- Kraijak, S.; Tuwanut, P. A survey on IoT architectures, protocols, applications, security, privacy, real-world implementation and future trends. In Proceedings of the 11th International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM 2015), Shanghai, China, 21–23 September 2015; pp. 1–6. [Google Scholar]
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of Things (IoT): A vision, architectural elements, and future directions. Future Gen. Comp. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef]
- Chiang, M.; Zhang, T. Fog and IoT: An overview of research opportunities. IEEE IoT J. 2016, 3, 854–864. [Google Scholar] [CrossRef]
- Liu, J.W.S. Real-Time Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2000. [Google Scholar]
- Ge, Y.; Liang, X.; Zhou, Y.C.; Pan, Z.; Zhao, G.T.; Zheng, Y.L. Adaptive analytic service for real-time Internet of things applications. In Proceedings of the 2016 IEEE International Conference on Web Services (ICWS), San Francisco, CA, USA, 27 June–2 July 2016; pp. 484–491. [Google Scholar]
- Kim, J.E.; Abdelzaher, T.; Sha, L.; Bar-Noy, A.; Hobbs, R.; Dron, W. On maximizing quality of information for the Internet of things: A real-time scheduling perspective. In Proceedings of the 2016 IEEE 22nd International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Daegu, Korea, 17–19 August 2016; pp. 202–211. [Google Scholar]
- Buttazzo, G. Hard Real-Time Computing Systems: Predictable Scheduling Algorithms and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 24. [Google Scholar]
- Mok, A.K. Fundamental Design Problems of Distributed Systems for The Hard-Real-Time Environment; Technical Report; Massachusetts Institute of Technology: Cambridge, MA, USA, 1983. [Google Scholar]
- Liu, C.L.; Layland, J.W. Scheduling algorithms for multiprogramming in a hard-real-time environment. JACM 1973, 20, 46–61. [Google Scholar] [CrossRef]
- Davis, R.I. A review of fixed priority and EDF scheduling for hard real-time uniprocessor systems. ACM SIGBED Rev. 2014, 11, 8–19. [Google Scholar] [CrossRef]
- Davis, R.I.; Burns, A. A survey of hard real-time scheduling for multiprocessor systems. ACM CSUR 2011, 43, 35. [Google Scholar] [CrossRef]
- Joseph, M.; Pandya, P. Finding response times in a real-time system. Comp. J. 1986, 29, 390–395. [Google Scholar] [CrossRef]
- Audsley, N.; Burns, A.; Richardson, M.; Tindell, K.; Wellings, A.J. Applying new scheduling theory to static priority pre-emptive scheduling. SE J. 1993, 8, 284–292. [Google Scholar]
- Bini, E.; Buttazzo, G.C. Schedulability analysis of periodic fixed priority systems. IEEE Trans. Comp. 2004, 53, 1462–1473. [Google Scholar] [CrossRef]
- Mohan, S.; Bak, S.; Betti, E.; Yun, H.; Sha, L.; Caccamo, M. S3A: Secure system simplex architecture for enhanced security and robustness of cyber-physical systems. In Proceedings of the 2013 2nd ACM International Conference on High Confidence Networked Systems, Philadelphia, PA, USA, 9–11 April 2013; pp. 65–74. [Google Scholar]
- Yoon, M.K.; Mohan, S.; Choi, J.; Kim, J.E.; Sha, L. SecureCore: A multicore-based intrusion detection architecture for real-time embedded systems. In Proceedings of the 2013 IEEE 19th Real-Time and Embedded Technology and Applications Symposium (RTAS), Philadelphia, PA, USA, 9–11 April 2013; pp. 21–32. [Google Scholar]
- Yoon, M.K.; Mohan, S.; Choi, J.; Sha, L. Memory heat map: Anomaly detection in real-time embedded systems using memory behavior. In Proceedings of the 2015 52nd ACM/EDAC/IEEE Design Automation Conference (DAC), San Francisco, CA, USA, 8–12 June 2015; pp. 1–6. [Google Scholar]
- Yoon, M.K.; Mohan, S.; Choi, J.; Christodorescu, M.; Sha, L. Learning Execution Contexts from System Call Distribution for Anomaly Detection in Smart Embedded System. In Proceedings of the Second International Conference on Internet-of-Things Design and Implementation, Pittsburgh, PA, USA, 18–21 April 2017; pp. 191–196. [Google Scholar]
- Abad, F.A.T.; Van Der Woude, J.; Lu, Y.; Bak, S.; Caccamo, M.; Sha, L.; Mancuso, R.; Mohan, S. On-chip control flow integrity check for real time embedded systems. In Proceedings of the 2013 IEEE 1st International Conference on Cyber-Physical Systems, Networks and Applications (CPSNA), Taipei, Taiwan, 19–20 August 2013; pp. 26–31. [Google Scholar]
- Abdi, F.; Hasan, M.; Mohan, S.; Agarwal, D.; Caccamo, M. ReSecure: A Restart-Based Security Protocol for Tightly Actuated Hard Real-Time Systems. In Proceedings of the 1st Workshop on Security and Dependability of Critical Embedded Real-Time Systems, Porto, Portugal, 29 November–2 December 2016; pp. 47–54. [Google Scholar]
- Pellizzoni, R.; Paryab, N.; Yoon, M.K.; Bak, S.; Mohan, S.; Bobba, R.B. A generalized model for preventing information leakage in hard real-time systems. In Proceedings of the 21st IEEE Real-Time and Embedded Technology and Applications Symposium, Seattle, WA, USA, 13–16 April 2015; pp. 271–282. [Google Scholar]
- Francillon, A.; Castelluccia, C. Code Injection Attacks on Harvard-architecture Devices. In Proceedings of the 15th ACM Conference on Computer and Communications Security, Alexandria, VA, USA, 27–31 October 2008; ACM: New York, NY, USA, 2008; pp. 15–26. [Google Scholar]
- Hasan, M.; Mohan, S.; Bobba, R.B.; Pellizzoni, R. Exploring Opportunistic Execution for Integrating Security into Legacy Hard Real-Time Systems. In Proceedings of the 2016 IEEE Real-Time Systems Symposium (RTSS), Porto, Portugal, 29 November–2 December 2016; pp. 123–134. [Google Scholar]
- Hasan, M.; Mohan, S.; Pellizzoni, R.; Bobba, R.B. Contego: An Adaptive Framework for Integrating Security Tasks in Real-Time Systems. In Proceedings of the 29th Euromicro Conference on Real-Time Systems, Dubrovnik, Croatia, 28–30 June 2017. [Google Scholar]
- Hasan, M.; Mohan, S.; Pellizzoni, R.; Bobba, R.B. A design-space exploration for allocating security tasks in multicore real-time systems. In Proceedings of the 2018 Design, Automation & Test in Europe Conference & Exhibition (DATE), Dresden, Germany, 19–23 March 2018; pp. 225–230. [Google Scholar]
- Zhou, Y.; Feng, D. Side-Channel Attacks: Ten Years After Its Publication and the Impacts on Cryptographic Module Security Testing. IACR Cryptol. ePrint Arch. 2005, 2005, 388. [Google Scholar]
- Kelsey, J.; Schneier, B.; Wagner, D.; Hall, C. Side channel cryptanalysis of product ciphers. In European Symposium on Research in Computer Security; Springer: Berlin/Heidelberg, Germany, 1998; pp. 97–110. [Google Scholar]
- Jiang, K.; Batina, L.; Eles, P.; Peng, Z. Robustness analysis of real-time scheduling against differential power analysis attacks. In Proceedings of the 2014 IEEE Computer Society Annual Symposium on VLSI, Tampa, FL, USA, 9–11 July 2014; pp. 450–455. [Google Scholar]
- Son, J.; Alves-Foss, J. Covert timing channel analysis of rate monotonic real-time scheduling algorithm in MLS systems. In Proceedings of the 2006 IEEE Information Assurance Workshop, West Point, NY, USA, 21–23 June 2006; pp. 361–368. [Google Scholar]
- Agrawal, D.; Archambeault, B.; Rao, J.R.; Rohatgi, P. The EM side-channel(s). In International Workshop on Cryptographic Hardware and Embedded Systems; Springer: Berlin/Heidelberg, Germany, 2002; pp. 29–45. [Google Scholar]
- Bar-El, H.; Choukri, H.; Naccache, D.; Tunstall, M.; Whelan, C. The sorcerer’s apprentice guide to fault attacks. Proc. IEEE 2006, 94, 370–382. [Google Scholar] [CrossRef]
- Mohan, S.; Yoon, M.K.; Pellizzoni, R.; Bobba, R.B. Real-time systems security through scheduler constraints. In Proceedings of the 2014 26th Euromicro Conference on Real-Time Systems, Madrid, Spain, 8–11 July 2014; pp. 129–140. [Google Scholar]
- Loukas, G. Cyber-Physical Attacks: A Growing Invisible Threat; Butterworth-Heinemann: Oxford, UK, 2015. [Google Scholar]
- Xie, T.; Qin, X. Improving security for periodic tasks in embedded systems through scheduling. ACM TECS 2007, 6, 20. [Google Scholar] [CrossRef]
- Lin, M.; Xu, L.; Yang, L.T.; Qin, X.; Zheng, N.; Wu, Z.; Qiu, M. Static security optimization for real-time systems. IEEE Trans. Ind. Inf. 2009, 5, 22–37. [Google Scholar] [CrossRef]
- Chen, C.Y.; Ghassami, A.; Nagy, S.; Yoon, M.K.; Mohan, S.; Kiyavash, N.; Bobba, R.B.; Pellizzoni, R. Schedule-Based Side-Channel Attack in Fixed-Priority Real-Time Systems; Technical Report; University of Illinois: Champaign, IL, USA, 2015. [Google Scholar]
- Abdi, F.; Chen, C.Y.; Hasan, M.; Liu, S.; Mohan, S.; Caccamo, M. Guaranteed physical security with restart-based design for cyber-physical systems. In Proceedings of the 9th ACM/IEEE International Conference on Cyber-Physical Systems, Porto, Portugal, 11–13 April 2018; pp. 10–21. [Google Scholar]
- Yoon, M.K.; Mohan, S.; Chen, C.Y.; Sha, L. TaskShuffler: A Schedule Randomization Protocol for Obfuscation against Timing Inference Attacks in Real-Time Systems. In Proceedings of the 2016 IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), Vienna, Austria, 11–14 April 2016; pp. 1–12. [Google Scholar]
- Sha, L. Using simplicity to control complexity. IEEE Softw. 2001, 18, 20–28. [Google Scholar]
- Candea, G.; Kiciman, E.; Zhang, S.; Keyani, P.; Fox, A. JAGR: An autonomous self-recovering application server. In Proceedings of the 2003 Autonomic Computing Workshop, Seattle, WA, USA, 25–25 June 2003; pp. 168–177. [Google Scholar]
- Candea, G.; Fox, A. Recursive restartability: Turning the reboot sledgehammer into a scalpel. In Proceedings of the Eighth Workshop on Hot Topics in Operating Systems, Elmau, Germany, 20–22 May 2001; pp. 125–130. [Google Scholar]
- Sha, L.; Rajkumar, R.; Lehoczky, J.P. Priority inheritance protocols: An approach to real-time synchronization. IEEE Trans. Comp. 1990, 39, 1175–1185. [Google Scholar] [CrossRef]
- Lo, D.; Ismail, M.; Chen, T.; Suh, G.E. Slack-aware opportunistic monitoring for real-time systems. In Proceedings of the 2014 IEEE 19th Real-Time and Embedded Technology and Applications Symposium (RTAS), Berlin, Germany, 15–17 April 2014; pp. 203–214. [Google Scholar]
- Virtualization and the Internet of Things; White Paper; Wind River: Alameda, CA, USA, 2016.
- Ge, Q.; Yarom, Y.; Cock, D.; Heiser, G. A survey of microarchitectural timing attacks and countermeasures on contemporary hardware. J. Crypt. Eng. 2016, 1–27. [Google Scholar] [CrossRef]
- Fuchs, C.M. The evolution of avionics networks from ARINC 429 to AFDX. NW Arch. Serv. 2012, 65, 1551–3203. [Google Scholar]
- Farsi, M.; Ratcliff, K.; Barbosa, M. An overview of controller area network. Comp. Cont. Eng. J. 1999, 10, 113–120. [Google Scholar] [CrossRef]
- Hoppe, T.; Kiltz, S.; Dittmann, J. Security threats to automotive CAN networks–practical examples and selected short-term countermeasures. In International Conference on Computer Safety, Reliability, and Security; Springer: Berlin/Heidelberg, Germany, 2008; pp. 235–248. [Google Scholar]
- McKeown, N.; Anderson, T.; Balakrishnan, H.; Parulkar, G.; Peterson, L.; Rexford, J.; Shenker, S.; Turner, J. OpenFlow: Enabling innovation in campus networks. ACM SIGCOMM Comp. Commun. Rev. 2008, 38, 69–74. [Google Scholar] [CrossRef]
- Kumar, R.; Hasan, M.; Padhy, S.; Evchenko, K.; Piramanayagam, L.; Mohan, S.; Bobba, R.B. End-to-End Network Delay Guarantees for Real-Time Systems using SDN. In Proceedings of the 2017 IEEE Real-Time Systems Symposium (RTSS), Paris, France, 5–8 December 2017. [Google Scholar]
- Son, S.; Chaney, C.; Thomlinson, N. Partial security policies to support timeliness in secure real-time databases. In Proceedings of the 1998 IEEE Symposium on Security and Privacy (Cat. No.98CB36186), Oakland, CA, USA, 6 May 1998; pp. 136–147. [Google Scholar]
- Kadloor, S.; Kiyavash, N.; Venkitasubramaniam, P. Mitigating Timing Side Channel in Shared Schedulers. IEEE/ACM Trans. Netw. 2016, 24, 1562–1573. [Google Scholar] [CrossRef]
- Gong, X.; Kiyavash, N. Timing Side Channels in Shared Queues. CoRR 2014. abs/1403.1276. [Google Scholar]
- Osvik, D.A.; Shamir, A.; Tromer, E. Cache attacks and countermeasures: The case of AES. In Cryptographers’ Track at the RSA Conference; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1–20. [Google Scholar]
- Page, D. Theoretical use of cache memory as a cryptanalytic side-channel. IACR Crypt. ePrint Arc. 2002, 2002, 169. [Google Scholar]
- Völp, M.; Hamann, C.J.; Härtig, H. Avoiding timing channels in fixed-priority schedulers. In Proceedings of the 2008 ACM Symposium on Information, Computer and Communications Security, Tokyo, Japan, 18–20 March 2008; pp. 44–55. [Google Scholar]
- Bao, C.; Srivastava, A. A secure algorithm for task scheduling against side-channel attacks. In Proceedings of the 4th International Workshop on Trustworthy Embedded Devices, Scottsdale, AZ, USA, 3 November 2014; pp. 3–12. [Google Scholar]
- Kocher, P.; Jaffe, J.; Jun, B.; Rohatgi, P. Introduction to differential power analysis. J. Cryptogr. Eng. 2011, 1, 5–27. [Google Scholar] [CrossRef]
- Ghassami, A.; Gong, X.; Kiyavash, N. Capacity limit of queueing timing channel in shared FCFS schedulers. In Proceedings of the 2015 IEEE International Symposium on Information Theory (ISIT), Hong Kong, China, 14–19 June 2015; pp. 789–793. [Google Scholar]
- Völp, M.; Engel, B.; Hamann, C.J.; Härtig, H. On Confidentiality Preserving Real-Time Locking Protocols. In Proceedings of the 2013 IEEE 19th Real-Time and Embedded Technology and Applications Symposium (RTAS), Philadelphia, PA, USA, 9–11 April 2013; pp. 153–162. [Google Scholar]
- Krüger, K.; Völp, M.; Fohler, G. Vulnerability analysis and mitigation of directed timing inference based attacks on time-triggered systems. ECRTS 2018, 106, 22:1–22:17. [Google Scholar]
- Lesi, V.; Jovanov, I.; Pajic, M. Network Scheduling for Secure Cyber-Physical Systems. In Proceedings of the 2017 IEEE Real-Time Systems Symposium (RTSS), Paris, France, 5–8 December 2017; pp. 45–55. [Google Scholar]
- Lesi, V.; Jovanov, I.; Pajic, M. Security-Aware Scheduling of Embedded Control Tasks. ACM TECS 2017, 16, 188. [Google Scholar] [CrossRef]
- Ngu, A.H.; Gutierrez, M.; Metsis, V.; Nepal, S.; Sheng, M.Z. IoT Middleware: A Survey on Issues and Enabling technologies. IEEE IoT J. 2017, 4, 1–20. [Google Scholar] [CrossRef]
- Mohsin, M.; Anwar, Z.; Husari, G.; Al-Shaer, E.; Rahman, M.A. IoTSAT: A formal framework for security analysis of the Internet of things (IoT). In Proceedings of the 2016 IEEE Conference on Communications and Network Security (CNS), Philadelphia, PA, USA, 17–19 October 2016; pp. 180–188. [Google Scholar]
- Wurm, J.; Hoang, K.; Arias, O.; Sadeghi, A.R.; Jin, Y. Security analysis on consumer and industrial IoT devices. In Proceedings of the 2016 21st Asia and South Pacific Design Automation Conference (ASP-DAC), Macau, China, 25–28 Janaury 2016; pp. 519–524. [Google Scholar]
- Pacheco, J.; Hariri, S. IoT Security Framework for Smart Cyber Infrastructures. In Proceedings of the 2016 IEEE 1st International Workshops on Foundations and Applications of Self* Systems (FAS*W), Augsburg, Germany, 12–16 September 2016; pp. 242–247. [Google Scholar]
- Smar, J.; Savola, R.; Savolainen, P.; Evesti, A. Mitigating IoT security threats with a trusted Network element. In Proceedings of the 2016 11th International Conference for Internet Technology and Secured Transactions (ICITST), Barcelona, Spain, 5–7 December 2016; pp. 260–265. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| • | Implemented as a system of periodic/sporadic tasks |
| • | Stringent timing requirements |
| • | Worst-case bounds are known for all loops |
| • | No dynamically loaded or self modified codes |
| • | Recursion is either not used or statically bounded |
| • | Memory and processing power is often limited |
| • | Communication flows with mixed timing criticality |
| References | Approach | Attack Surface | Overhead/Costs |
|---|---|---|---|
| Simplex-based security [27,28,29,30,31] | Use verified/secure hardware module to monitor system behavior (e.g., timing [28] and execution pattern [27], memory access [29], system call usage [30], control flow [31]) | Code injection attacks | Require custom hardware or monitoring unit |
| Security by platform-level reset [32,49] | Periodically and/or asynchronously (e.g., upon detection of a malicious activity) restart the platform and load an uncompromised OS image | Code injection, side channel and DoS attacks | Extra hardware to ensure safety during periodic/asynchronous restart events |
| Cache flushing [33,44] | Flush the shared medium (e.g., cache) between the consecutive execution of high-priority (security sensitive) and low-priority (potentially vulnerable) tasks | Side-channel (cache) attacks | Overhead of cache flushing reduces task-set schedulability |
| Schedule randomization [50] | Randomize the task execution order (i.e., schedule) to reduce the predictability | Side-channel attacks | Extra context switch |
| Security task integration for legacy RT-IoT [35,37] | Execute monitoring/intrusion detection tasks with a priority lower than real-time task to preserve the real-time task parameters (e.g., period, WCET and execution order) | Code injection, side-channel, DoS and/or communication attacks depending on the what monitoring tasks are used | Running security task with lower priority may cause longer detection time due to high interference (e.g., preemption) from real-time tasks |
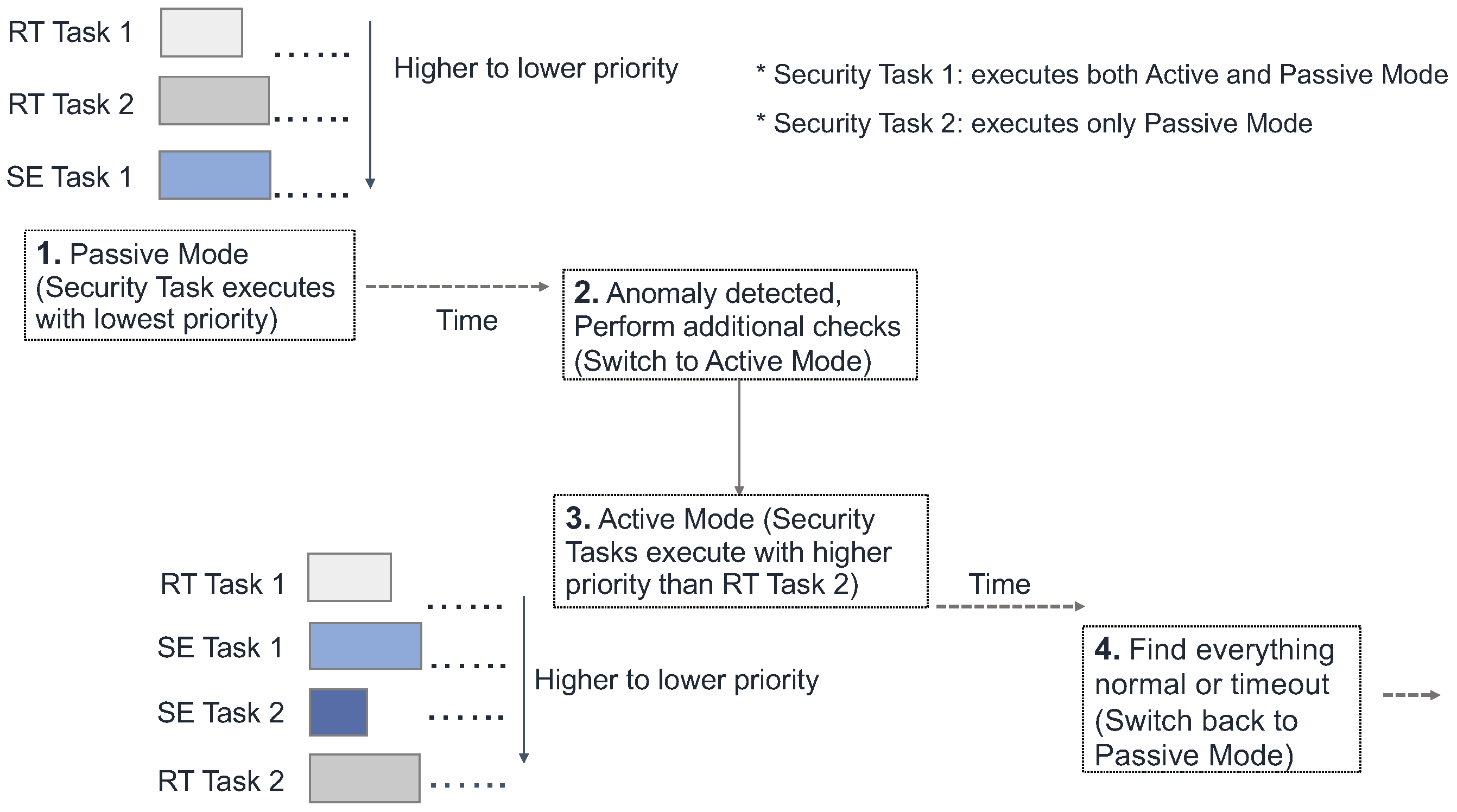
| Adaptive security task integration [36] | Execute monitoring/intrusion detection tasks with a lowest priority most of the time (e.g., during normal system operation)—however change the mode of operation execute with a higher priority (for a limited amount of time) if any anomalous behavior is suspected | Code injection, side-channel, DoS and/or communication attacks depending on the what monitoring tasks are used | False positive detection may cause unnecessary mode switches |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.-Y.; Hasan, M.; Mohan, S. Securing Real-Time Internet-of-Things. Sensors 2018, 18, 4356. https://doi.org/10.3390/s18124356
Chen C-Y, Hasan M, Mohan S. Securing Real-Time Internet-of-Things. Sensors. 2018; 18(12):4356. https://doi.org/10.3390/s18124356
Chicago/Turabian StyleChen, Chien-Ying, Monowar Hasan, and Sibin Mohan. 2018. "Securing Real-Time Internet-of-Things" Sensors 18, no. 12: 4356. https://doi.org/10.3390/s18124356
APA StyleChen, C.-Y., Hasan, M., & Mohan, S. (2018). Securing Real-Time Internet-of-Things. Sensors, 18(12), 4356. https://doi.org/10.3390/s18124356