FAST Pre-Filtering-Based Real Time Road Sign Detection for Low-Cost Vehicle Localization


Abstract
1. Introduction
2. Related Works
3. System Overview
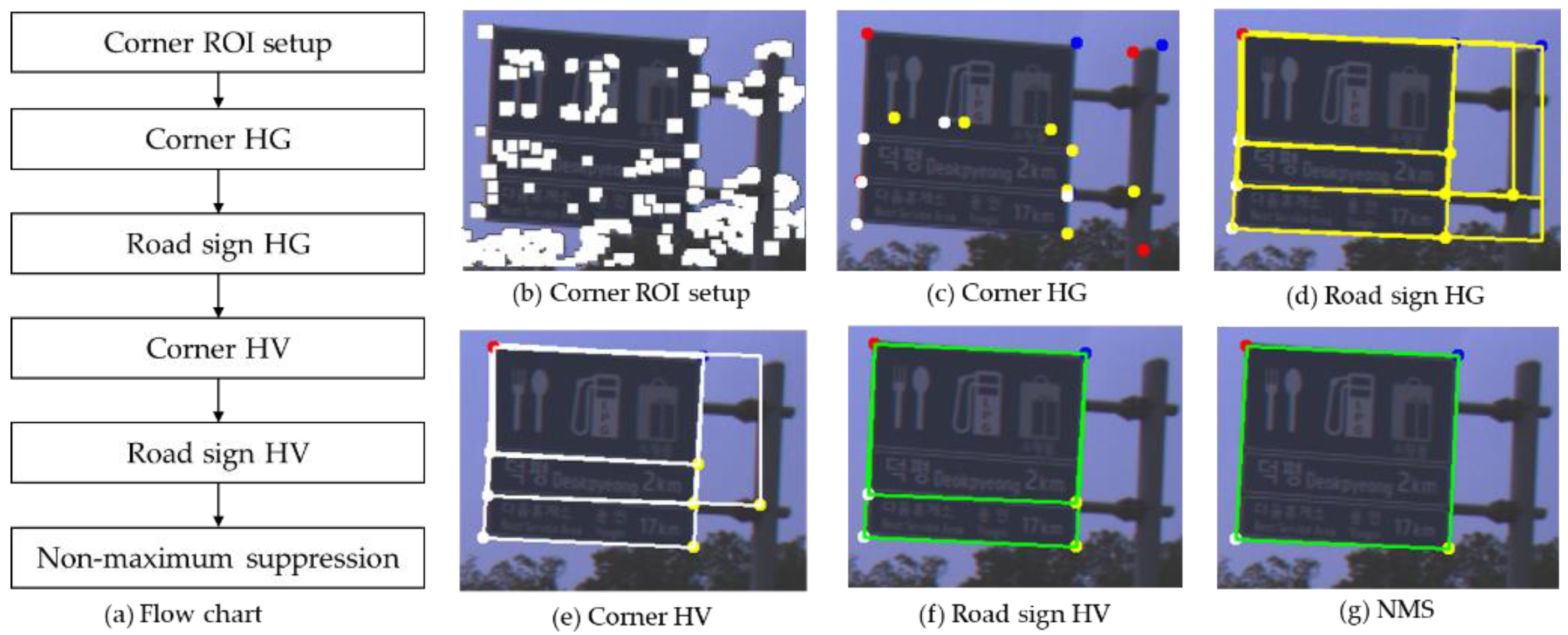
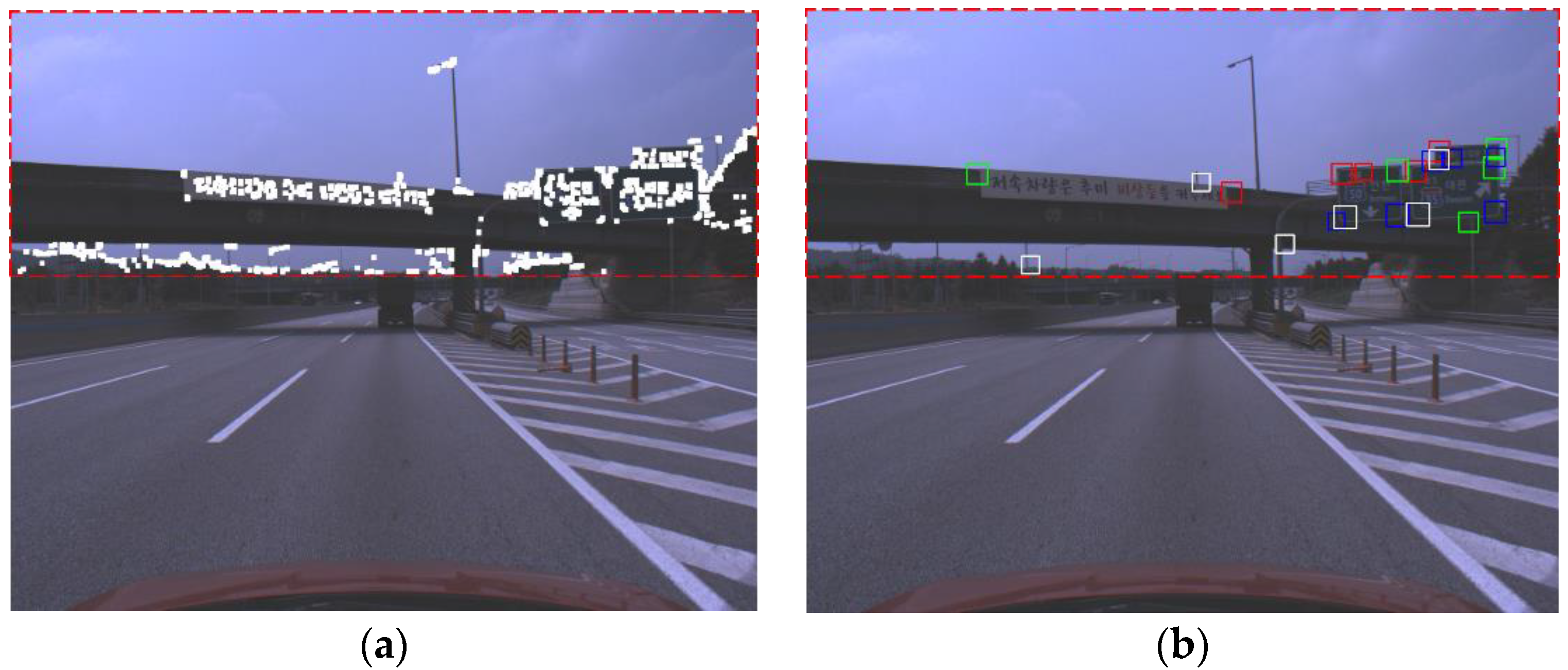
4. Corner ROI Setup
5. Road Sign Hypothesis Generation and Verification
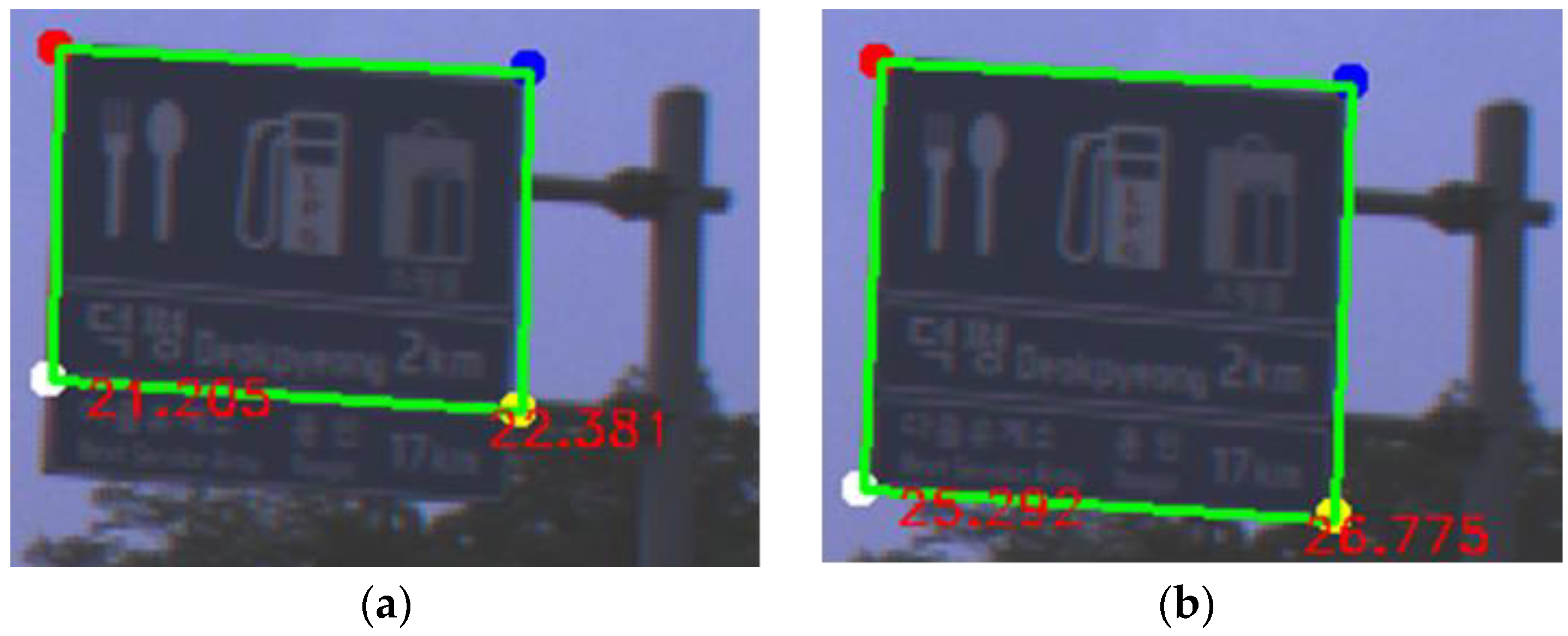
6. Non-Maximum Suppression
7. Experiments
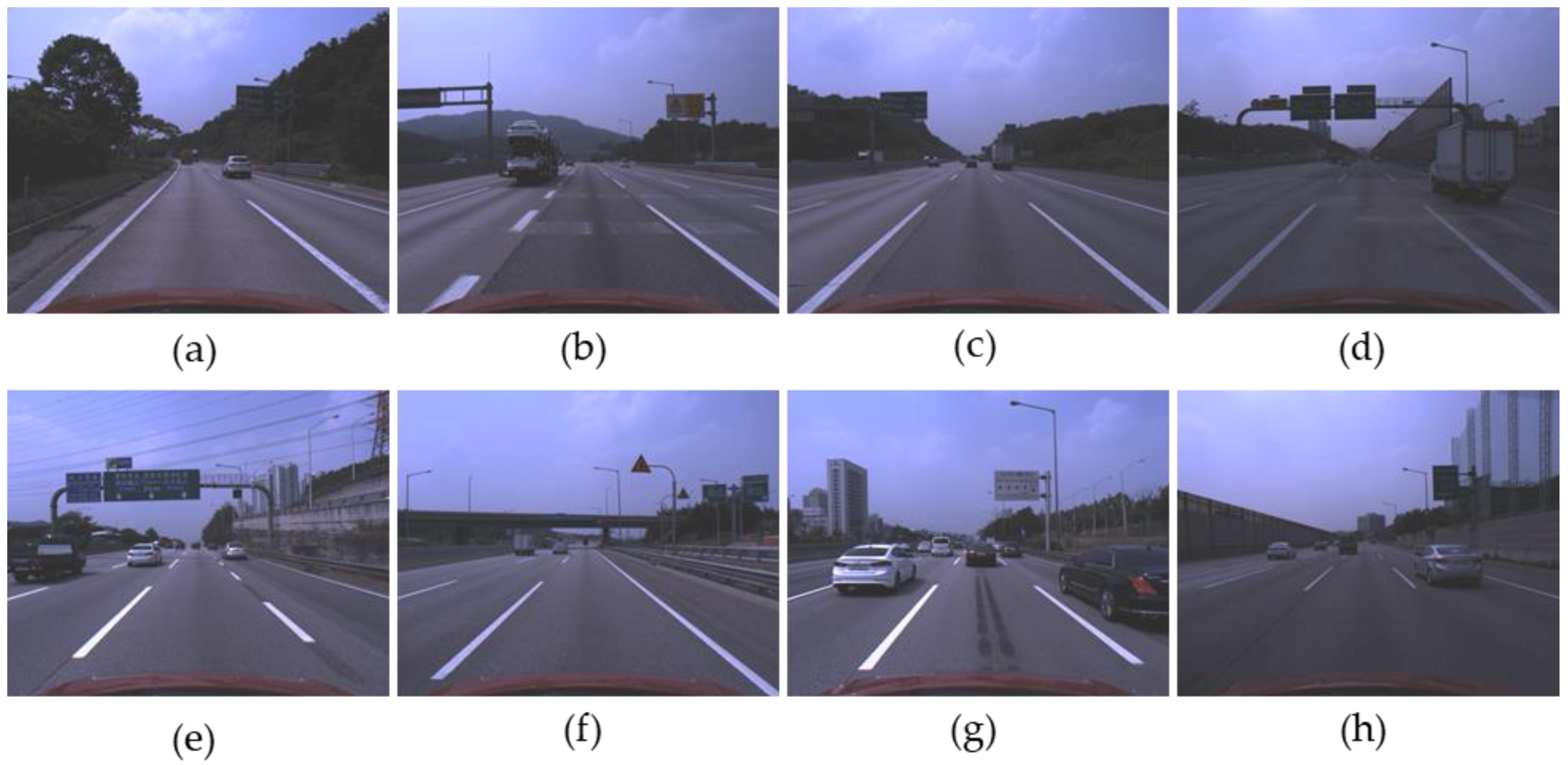
7.1. Experimental Database
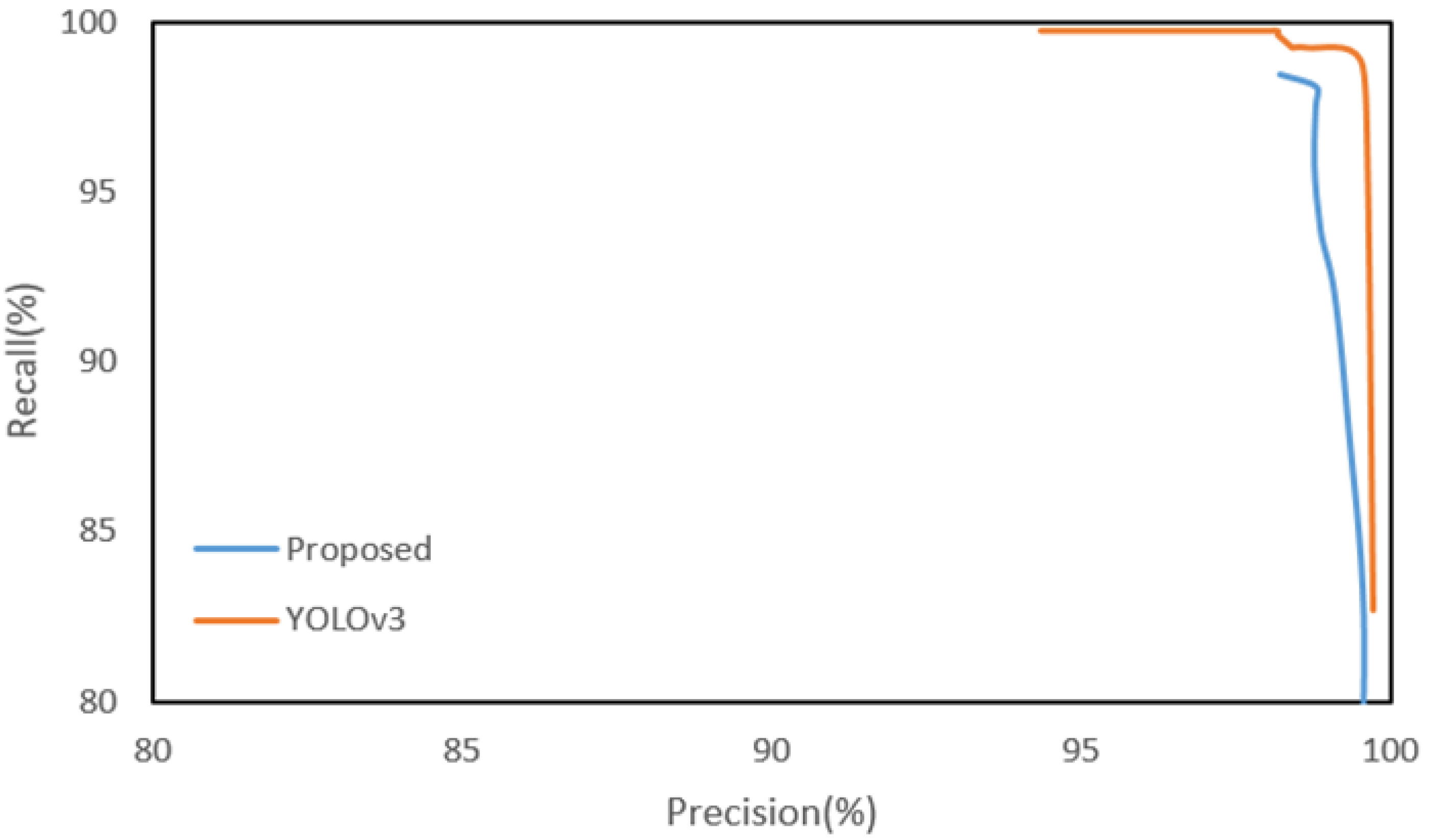
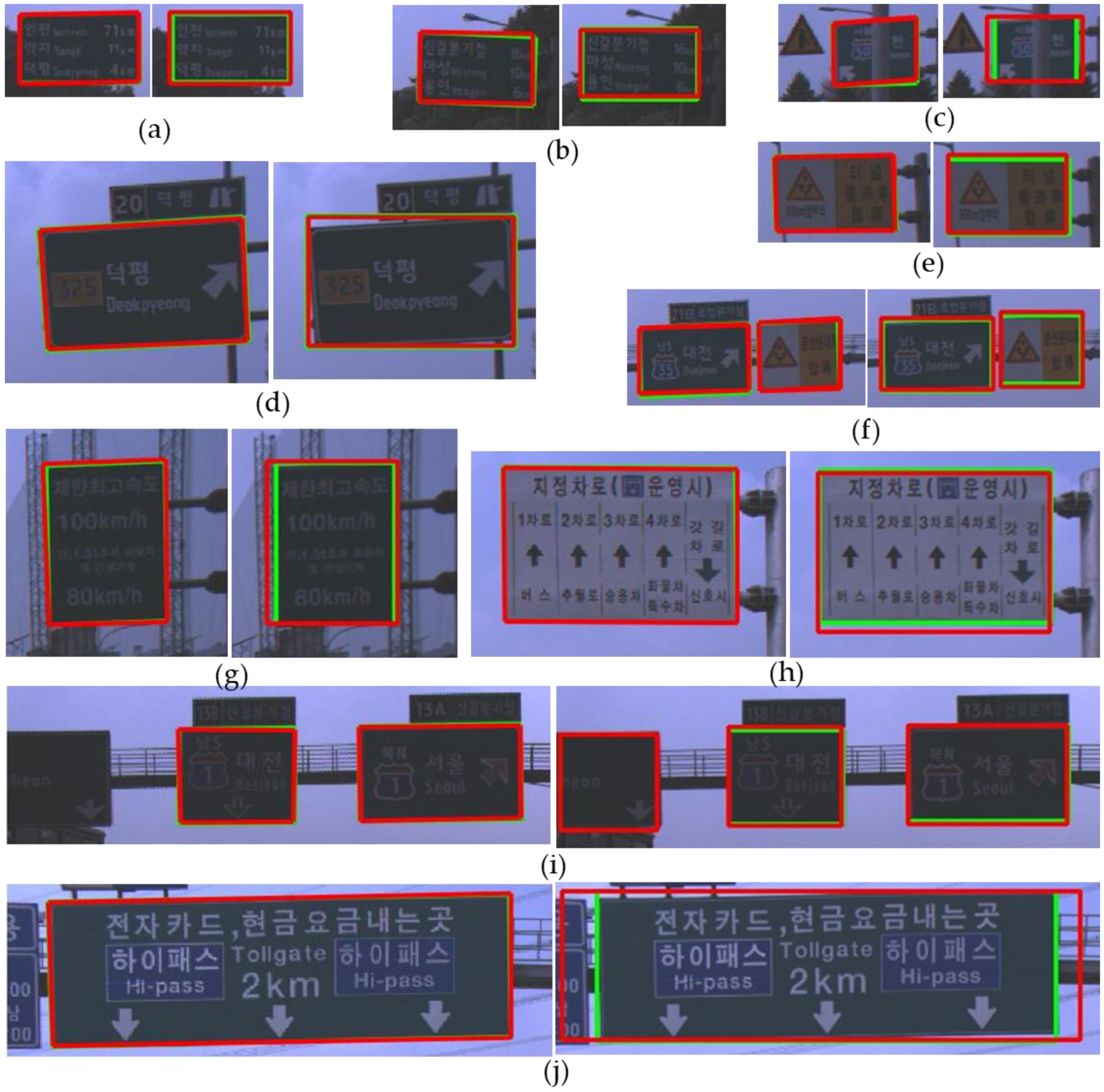
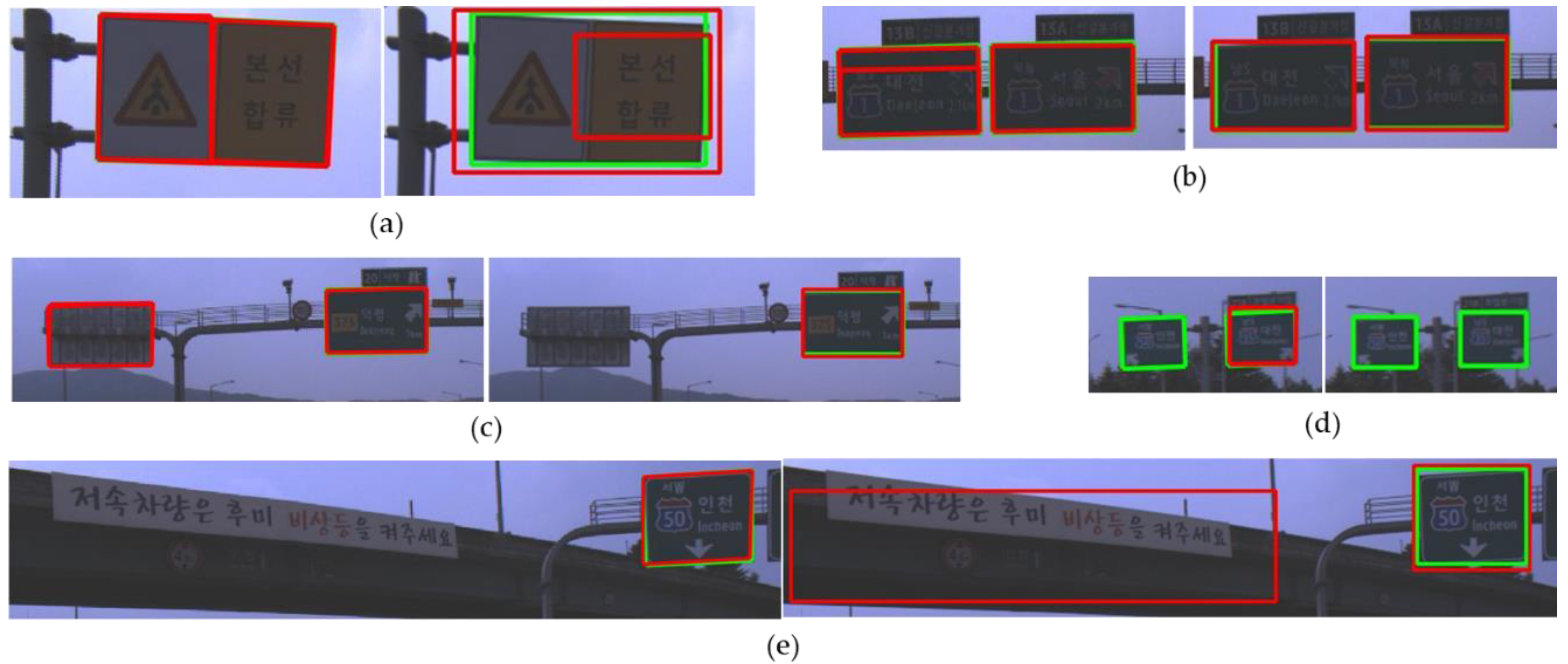
7.2. Experimental Results
8. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Corner HG Performance | Filter Size | ||||||
|---|---|---|---|---|---|---|---|
| 3 | 5 | 7 | 9 | 11 | 13 | 15 | |
| Time (ms) | 35.48 | 39.66 | 42.06 | 46.65 | 49.09 | 53.00 | 54.60 |
| Recall | 89.50% | 94.40% | 96.50% | 97.60% | 98.00% | 98.30% | 98.40% |
| Precision | 44.10% | 33.20% | 27.60% | 23.40% | 21.70% | 20.40% | 20.00% |
| Algorithm Step | Parameters | Value |
|---|---|---|
| Corner ROI setup | FAST threshold | 10 |
| Dilation filter size | 9 | |
| Corner HG | Feature | Local Binary Pattern |
| Training patch size | 24 × 24 | |
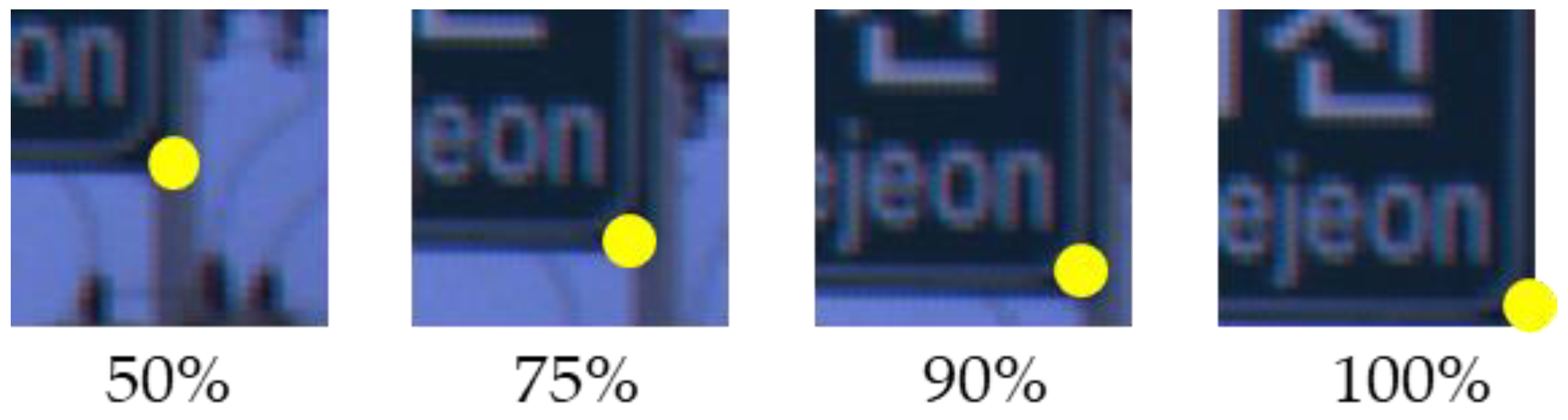
| Side length ratio in training patch | 75% | |
| Detecting patch size range | 24 × 24~56 × 56 | |
| Scale factor | 1.1 | |
| Corner HV | HOG Patch size | 24 × 24 |
| Block size | 16 | |
| Stride | 8 | |
| Cell size | 8 | |
| Number of bins | 9 | |
| SVM threshold | −0.3 | |
| Road sign HV | HOG Patch size | 120 × 72 |
| Other parameters | Same as the corner HV | |
| Road sign NMS | IOU threshold | 0.3 |
| Aspect Ratio | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Min | −6.1° | −4.7° | 86.8° | 85.0° | −94.2° | 88.0° | −93.7° | 83.9° | 0.18 |
| Max | 5.7° | 4.5° | 94.0° | 94.4° | −85.5° | 93.3° | −87.2° | 93.5° | 1.4 |

References
- Ziegler, J.; Bender, P.; Schreiber, M.; Lategahn, H.; Strauss, T.; Stiller, C.; Dang, T.; Franke, U.; Appenrodt, N.; Kelle, C.G.; et al. Making Bertha Drive-An Autonomous Journey on a Historic Route. IEEE Intell. Transp. Syst. Mag. 2014, 6, 8–20. [Google Scholar] [CrossRef]
- Skog, I.; Handel, P. In-Car Positioning and Navigation Technologies—A Survey. IEEE Trans. Intell. Transp. Syst. 2009, 10, 4–21. [Google Scholar] [CrossRef]
- Alam, N.; Dempster, A.G. Cooperative Positioning for Vehicular Networks: Facts and Future. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1708–1717. [Google Scholar] [CrossRef]
- Yun, D.S.; Yu, H.S. Development of the Optimized Autonomous Navigation Algorithm for the Unmanned Vehicle using Extended Kalman Filter. Trans. KSAE 2008, 16, 7–14. [Google Scholar]
- Suhr, J.K.; Jang, J.G.; Min, D.H.; Jung, H.G. Sensor Fusion-based Low-cost Vehicle Localization System for Complex Urban Environment. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1078–1086. [Google Scholar] [CrossRef]
- Schlichting, A.; Brenner, C. Localization Using Automotive Laser Scanners and Local Pattern Matching. In Proceedings of the IEEE Intelligent Vehicle Symposium, Dearborn, MI, USA, 8–11 June 2014; pp. 414–419. [Google Scholar]
- Yoneda, K.; Tehrani, H.; Ogawa, T.; Hukuyama, N.; Mita, S. Lidar Scan Feature for Localization with Highly Precise 3-D Map. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 1345–1350. [Google Scholar]
- Hata, A.Y.; Wolf, D.F. Feature Detection for Vehicle Localization in Urban Environments Using a Multilayer LIDAR. IEEE Trans. Intell. Transp. Syst. 2016, 17, 420–429. [Google Scholar] [CrossRef]
- Lategahn, H.; Stiller, C. City GPS using Stereo Vision. In Proceedings of the 2012 IEEE International Conference on Vehicular Electronics and Safety (ICVES 2012), Istanbul, Turkey, 24–27 July 2012; pp. 1–6. [Google Scholar]
- Ziegler, J.; Lategahn, H.; Schreiber, M.; Keller, C.G.; Knoppel, C.; Hipp, J.; Haueis, M.; Stiller, C. Video Based Localization for Bertha. In Proceedings of the IEEE Intelligent Vehicle Symposium, Dearborn, MI, USA, 8–11 June 2014; pp. 1231–1238. [Google Scholar]
- Stübler, M.; Wiest, J.; Dietmayer, K. Feature-based Mapping and Self-localization for Road Vehicles Using a Single Grayscale Camera. In Proceedings of the IEEE Intelligent Vehicle Symposium, Seoul, Korea, 28 June–1 July 2015; pp. 267–272. [Google Scholar]
- Schreiber, M.; Knöppel, C.; Franke, U. Lane-Loc: Lane Marking based Localization Using Highly Accurate Maps. In Proceedings of the IEEE Intelligent Vehicle Symposium, Gold Coast, Australia, 23–26 June 2013; pp. 449–454. [Google Scholar]
- Nedevschi, S.; Popescu, V.; Danescu, R.; Marita, T.; Oniga, F. Accurate Ego-Vehicle Global Localization at Intersections Through Alignment of Visual Data with Digital Map. IEEE Trans. Intell. Transp. Syst. 2013, 14, 673–687. [Google Scholar] [CrossRef]
- Jo, K.C.; Jo, Y.W.; Suhr, J.K.; Jung, H.G.; Sunwoo, M.H. Precise Localization of an Autonomous Car Based on Probabilistic Noise Models of Road Surface Marker Features Using Multiple Cameras. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3377–3392. [Google Scholar] [CrossRef]
- Kim, D.S.; Jung, H.G. Road Surface Marking Detection for Sensor Fusion-based Positioning System. Trans. KSAE 2014, 22, 107–116. [Google Scholar]
- Jo, G.H.; Suhr, J.K.; Jung, H.G. Road Sign Detection based Driving Lane Recognition System. In Proceedings of the KSAE Spring Conference, Gwangju, Korea, 28–30 May 2015; pp. 496–501. [Google Scholar]
- Mogelmose, A.; Trivedi, M.M.; Moeslund, T.B. Vision-Based Traffic Sign Detection and Analysis for Intelligent Driver Assistance Systems: Perspectives and Survey. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1484–1497. [Google Scholar] [CrossRef]
- Maldonado-Bascon, S.; Lafuente-Arroyo, S.; Gil-Jimenez, P.; Gomez-Moreno, H.; López-Ferreras, F. Road-sign detection and recognition based on support vector machines. IEEE Trans. Intell. Transp. Syst. 2007, 8, 264–278. [Google Scholar] [CrossRef]
- Gil Jiménez, P.; Bascón, S.M.; Moreno, H.G.; Arroyo, S.L.; Ferreras, F.L. Traffic sign shape classification and localization based on the normalized FFT of the signature of blobs and 2D homographies. Signal Proc. 2008, 88, 2943–2955. [Google Scholar] [CrossRef]
- Gomez-Moreno, H.; Maldonado-Bascon, S.; Gil-Jimenez, P.; Lafuente-Arroyo, S. Goal evaluation of segmentation algorithms for traffic sign recognition. IEEE Trans. Intell. Transp. Syst. 2010, 11, 917–930. [Google Scholar] [CrossRef]
- García-Garrido, M.A.; Ocaña, M.; Llorca, D.F.; Sotelo, M.A.; Arroyo, E.; Llamazares, A. Robust traffic signs detection by means of vision and V2I communications. In Proceedings of the IEEE Conference on Intelligent Transportation System, Maui, HA, USA, 5–7 October 2011; pp. 1003–1008. [Google Scholar]
- Barnes, N.; Zelinsky, A.; Fletcher, L.S. Real-time speed sign detection using the radial symmetry detector. IEEE Trans. Intell. Transp. Syst. 2008, 9, 322–332. [Google Scholar] [CrossRef]
- Balali, V.; Asce, S.M.; Golparvar-fard, M.; Asce, A.M. Evaluation of Multiclass Traffic Sign Detection and Classification Methods for U.S. Roadway Asset Inventory Management. ASCE J. Comput. Civ. Eng. 2015, 30, 1–16. [Google Scholar] [CrossRef]
- Liu, C.; Chang, F.; Liu, C. Occlusion-robust traffic sign detection via cascaded colour cubic feature. IET Intell. Transp. Syst. 2015, 10, 354–360. [Google Scholar] [CrossRef]
- Møgelmose, A.; Liu, D.; Trivedi, M.M. Detection of U.S. Traffic Signs. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1–10. [Google Scholar] [CrossRef]
- Yuan, Y.; Xiong, Z.; Wang, Q. An Incremental Framework for Video-Based Traffic Sign Detection, Tracking, and Recognition. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1918–1929. [Google Scholar] [CrossRef]
- Balali, V.; Ashouri Rad, A.; Golparvar-Fard, M. Detection, classification, and mapping of U.S. traffic signs using google street view images for roadway inventory management. J. Vis. Eng. 2015, 3, 15. [Google Scholar] [CrossRef]
- Yang, Y.; Luo, H.; Xu, H.; Wu, F. Towards real-time traffic sign detection and classification. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2022–2031. [Google Scholar] [CrossRef]
- Luo, H.; Yang, Y.; Tong, B.; Wu, F.; Fan, B. Traffic Sign Recognition Using a Multi-Task Convolutional Neural Network. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1100–1111. [Google Scholar] [CrossRef]
- Lee, H.S.; Kim, K. Simultaneous Traffic Sign Detection and Boundary Estimation Using Convolutional Neural Network. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1652–1663. [Google Scholar] [CrossRef]
- Korea National Police Agency. Traffic Sign Installation and Maintenance Manual; Bumsin: Seoul, Korea, 2011.
- Wenzel, T.; Brueggert, S.; Denzler, J. Additional Traffic Sign Detection Using Learned Corner Representations. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium, Gothenburg, Sweden, 19–22 June 2016; pp. 316–321. [Google Scholar]
- Wenzel, T.; Chou, T.-W.; Brueggert, S.; Denzler, J. From Corners to Rectangles—Directional Road Sign Detection Using Learned Corner Representations. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017; pp. 1039–1044. [Google Scholar]
- Lee, S.J.; Suhr, J.K.; Jung, H.G. Corner Detection-based Road Sign Detection for Low-cost Sensor Fusion-based Precise Localization System. Trans. KSAE 2018, 26, 20–31. [Google Scholar] [CrossRef]
- Rosten, E.; Porter, R.; Drummond, T. FASTER and better: A machine learning approach to corner detection. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 105–119. [Google Scholar] [CrossRef] [PubMed]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv, 2018; arXiv:1804.02767. [Google Scholar]
- Ra, M.; Jung, H.G.; Suhr, J.K.; Kim, W. Part-based vehicle detection in side-rectilinear images for blind-spot detection. Exp. Syst. Appl. Mag. 2018, 101, 116–128. [Google Scholar] [CrossRef]
- Viola, P.; Jones, M. Robust Real-Time Face Detection. Int. J. Comp. Vis. 2004, 57, 137–154. [Google Scholar] [CrossRef]
- Ahonen, T.; Hadid, A.; Pietikäinen, M. Face Description with Local Binary Patterns: Application to Face Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 2037–2041. [Google Scholar] [CrossRef] [PubMed]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. Mag. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of Oriented Gradients for Human Detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Harris, C.; Stephens, M. A combined corner and edge detector. In Proceedings of the 4th Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; pp. 147–151. [Google Scholar]
- Shi, J.; Tomasi, C. Good Features to Track. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust invariant scalable keypoints. In Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2548–2555. [Google Scholar]
- Specification of a Road Sign and Installation Guide etc; Korea Ministry of Land, Infrastructure and Transport: Sejong Special Governing City, Korea, 2016.
- OpenCV, Object Detection (Objdetect Module). Available online: http://www.opencv.org (accessed on 18 October 2018).
- Jang, C.; Cho, S.; Jeong, S.; Suhr, J.K.; Jung, H.G.; Sunwoo, M. Traffic light recognition exploiting map and localization at every stage. Exp. Syst. Appl. 2017, 88, 290–304. [Google Scholar] [CrossRef]














| Method | Number of Corners (1500) | Number of Corners (150) |
|---|---|---|
| FAST [35] |  |  |
| Harris [42] |  |  |
| Shi [43] |  |  |
| BRISK [44] |  |  |
| DB No. | No of Images | Frame Rate | No of Road Signs | Usage |
|---|---|---|---|---|
| 1 | 22,121 | 15 | 1371 | Training VJ corner detector |
| 2 | 40,076 | 20 | 1093 | All training phases |
| 3 | 32,345 | 20 | 832 | All test phases |
| Steps | Without FAST Corner ROI | With FAST Corner ROI | YOLOv3 [36] | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Recall (%) | Precision (%) | Time (ms) | Recall (%) | Precision (%) | Time (ms) | Recall (%) | Precision (%) | Time (ms) | |
| Corner HG | 97.27 | 22.48 | 183.7 | 97.20 | 19.56 | 46.6 | |||
| Sign HG | 98.80 | 51.89 | 185.1 | 99.04 | 53.13 | 48.2 | |||
| Corner HV | 98.80 | 55.76 | 186.3 | 98.92 | 55.68 | 49.5 | |||
| Sign HV | 97.83 | 93.03 | 202.3 | 97.72 | 92.28 | 66.5 | |||
| Final | 97.59 | 99.39 | 202.8 | 97.48 | 98.78 | 66.7 | 99.63 | 98.16 | 4802 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, K.; Suhr, J.K.; Jung, H.G. FAST Pre-Filtering-Based Real Time Road Sign Detection for Low-Cost Vehicle Localization. Sensors 2018, 18, 3590. https://doi.org/10.3390/s18103590
Choi K, Suhr JK, Jung HG. FAST Pre-Filtering-Based Real Time Road Sign Detection for Low-Cost Vehicle Localization. Sensors. 2018; 18(10):3590. https://doi.org/10.3390/s18103590
Chicago/Turabian StyleChoi, Kyoungtaek, Jae Kyu Suhr, and Ho Gi Jung. 2018. "FAST Pre-Filtering-Based Real Time Road Sign Detection for Low-Cost Vehicle Localization" Sensors 18, no. 10: 3590. https://doi.org/10.3390/s18103590
APA StyleChoi, K., Suhr, J. K., & Jung, H. G. (2018). FAST Pre-Filtering-Based Real Time Road Sign Detection for Low-Cost Vehicle Localization. Sensors, 18(10), 3590. https://doi.org/10.3390/s18103590