In Design of an Ocean Bottom Seismometer Sensor: Minimize Vibration Experienced by Underwater Low-Frequency Noise


Abstract
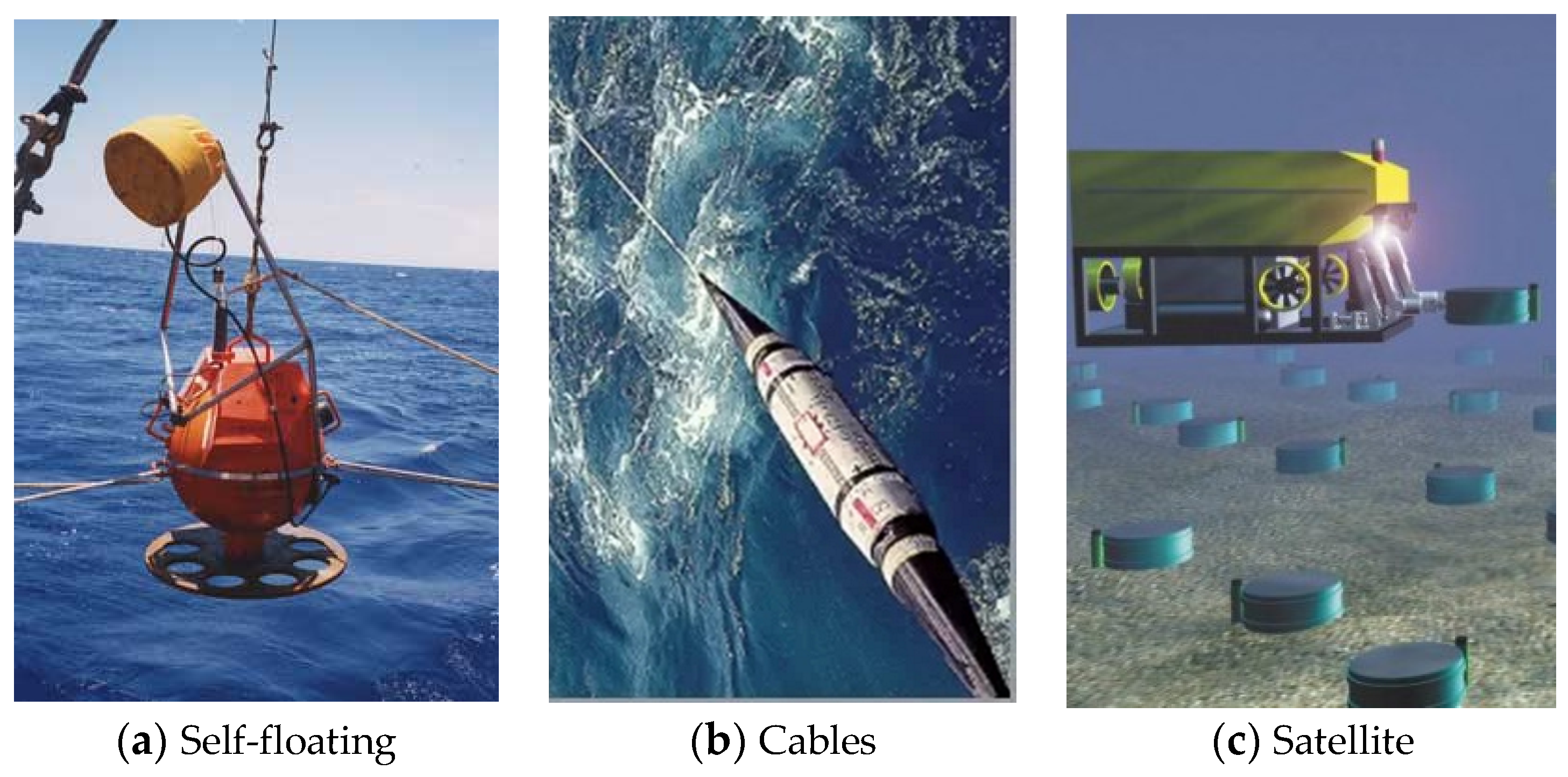
1. Introduction
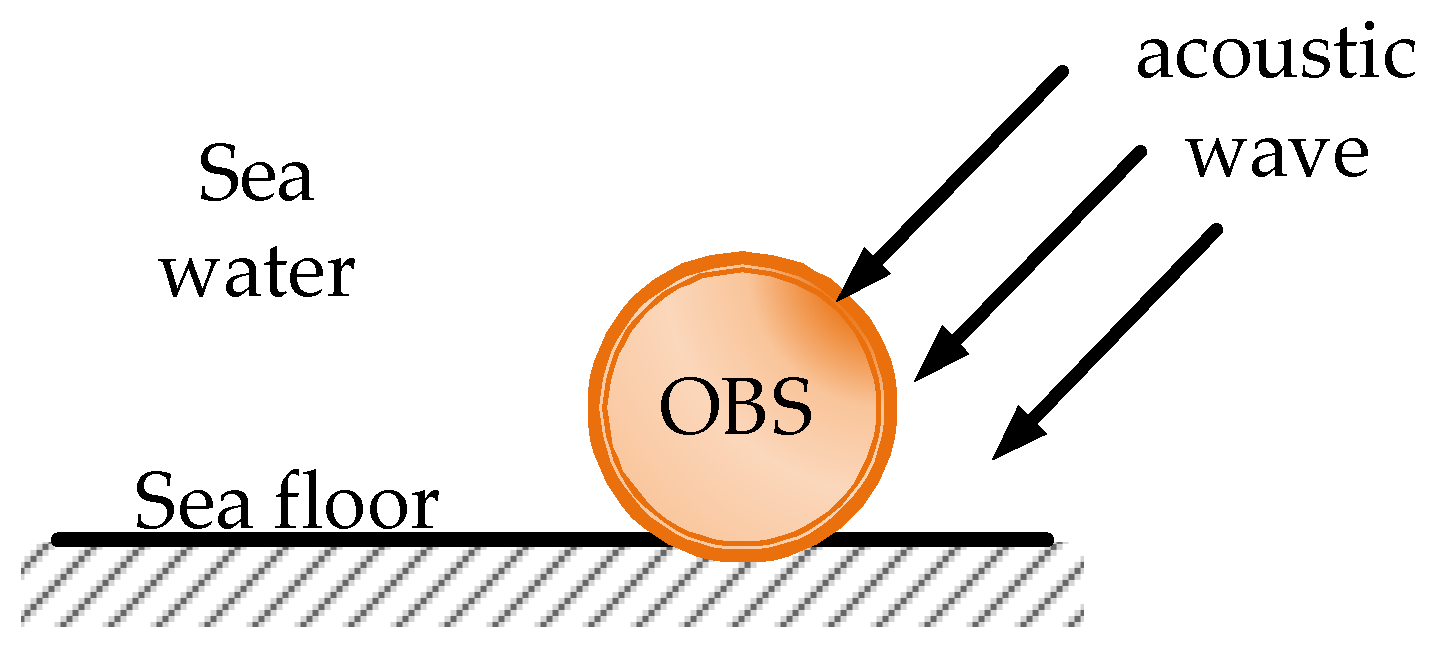
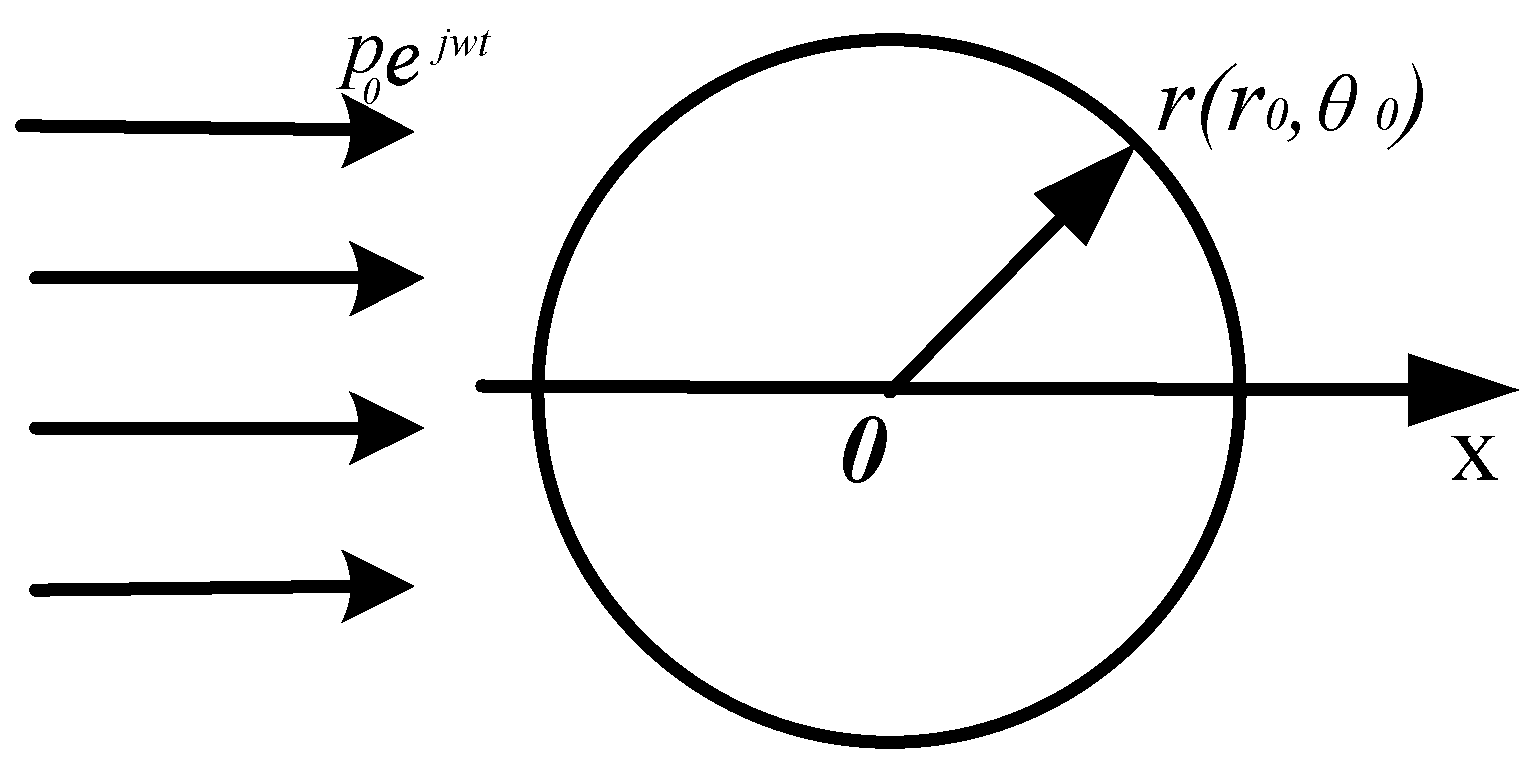
2. Vibration Velocities of the OBSs Placed on the Seafloor
- (1)
- If normal stress is continuous, the sound pressure of outer point is equal to the normal stress of inner point but with opposite direction;
- (2)
- If normal vibration velocity is continuous, the vibration velocity of outer point is equal to the vibration velocity of inner point in normal direction but with opposite direction;
- (3)
- If tangential stress at both adjacent inner and outer points of the surface of sphere is zero, then the formula is expressed as [20]:
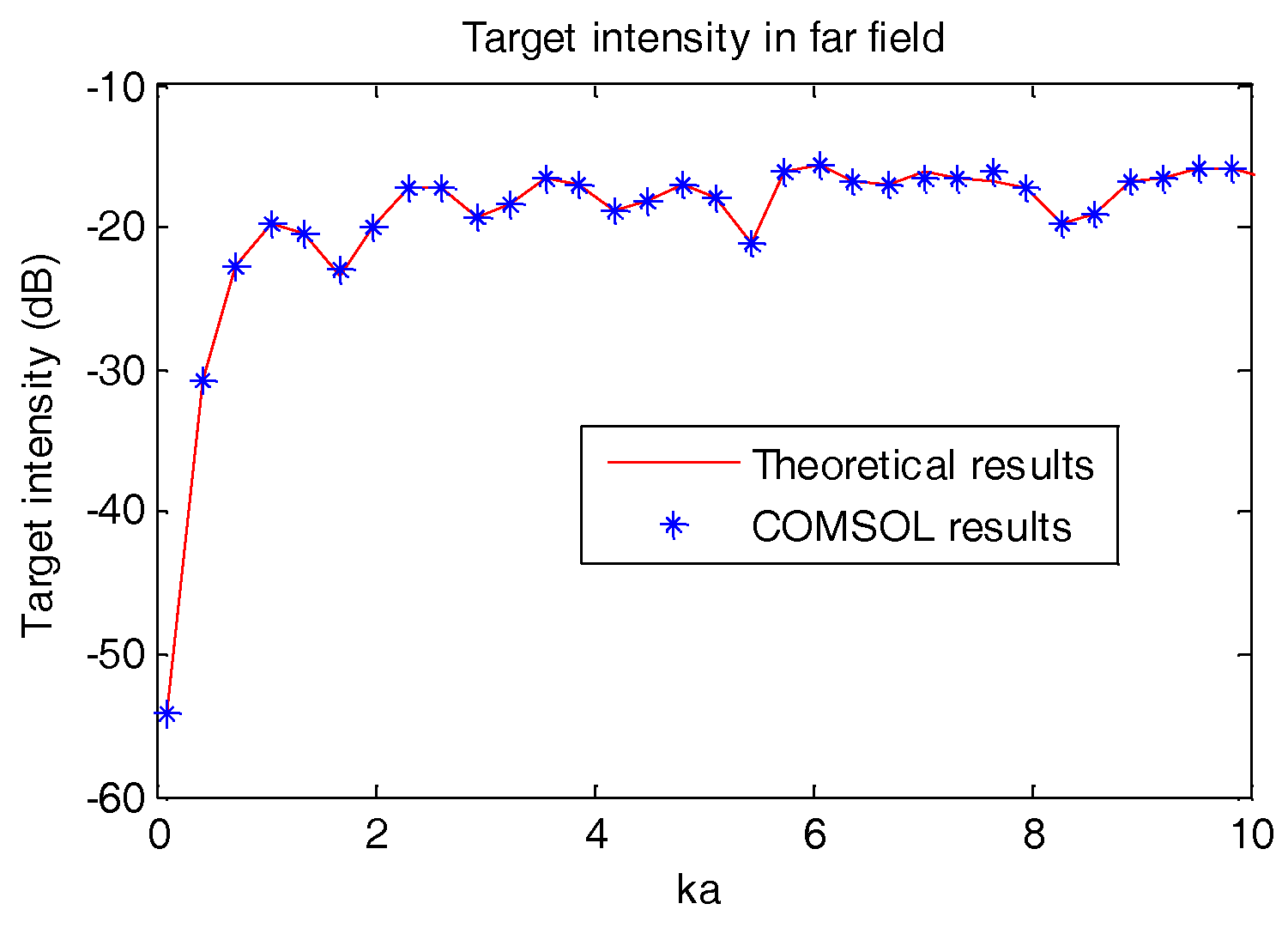
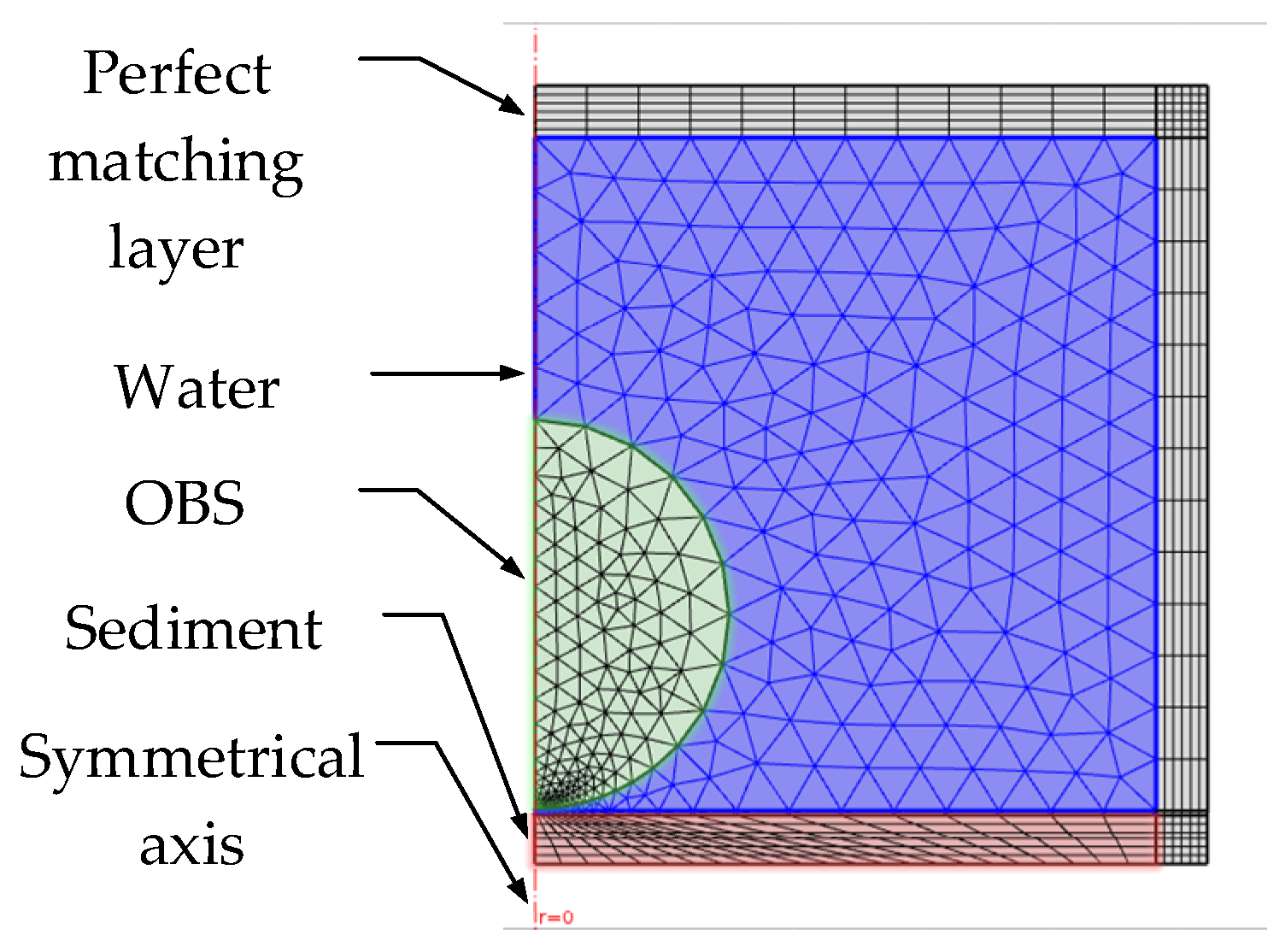
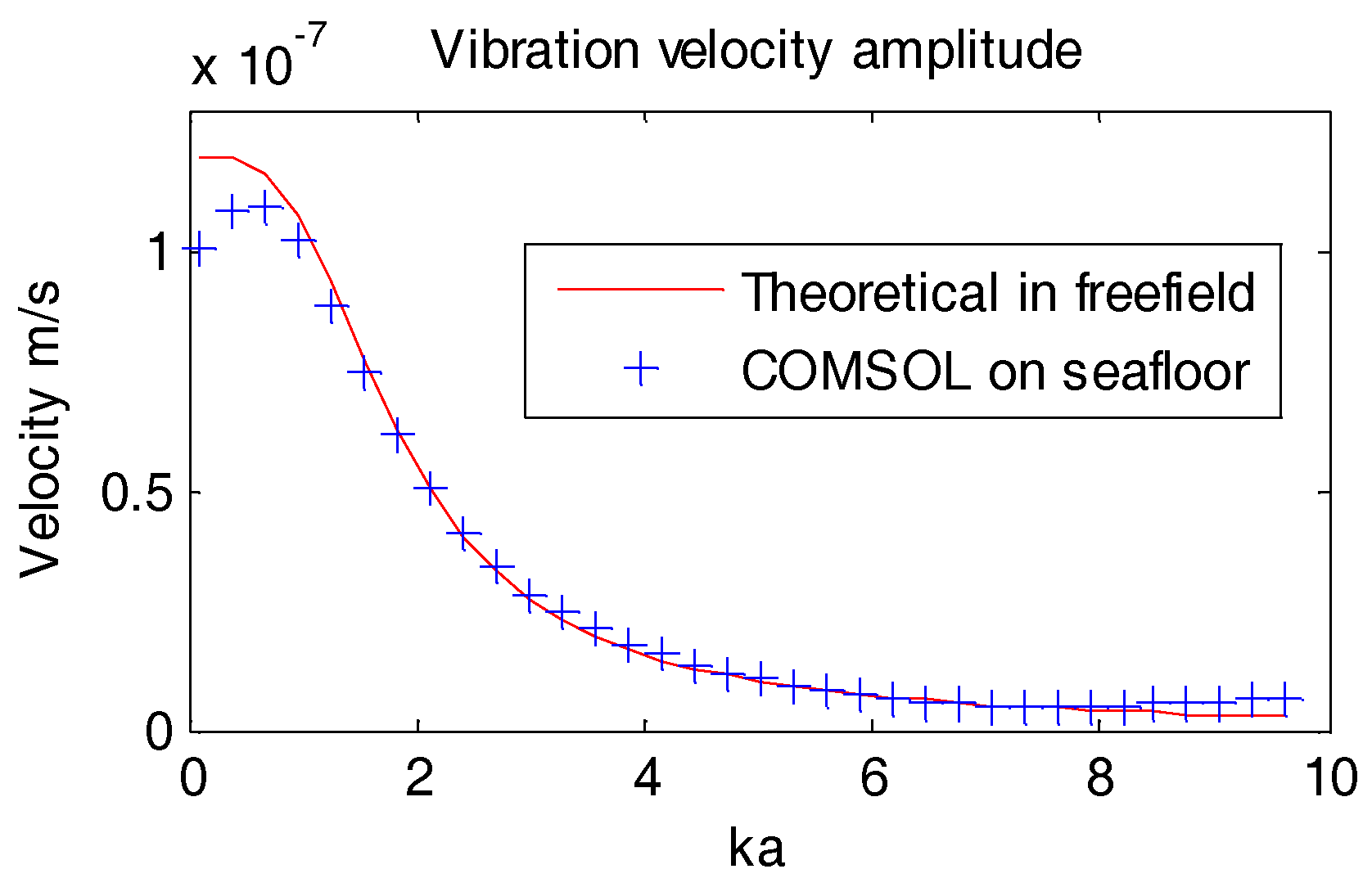
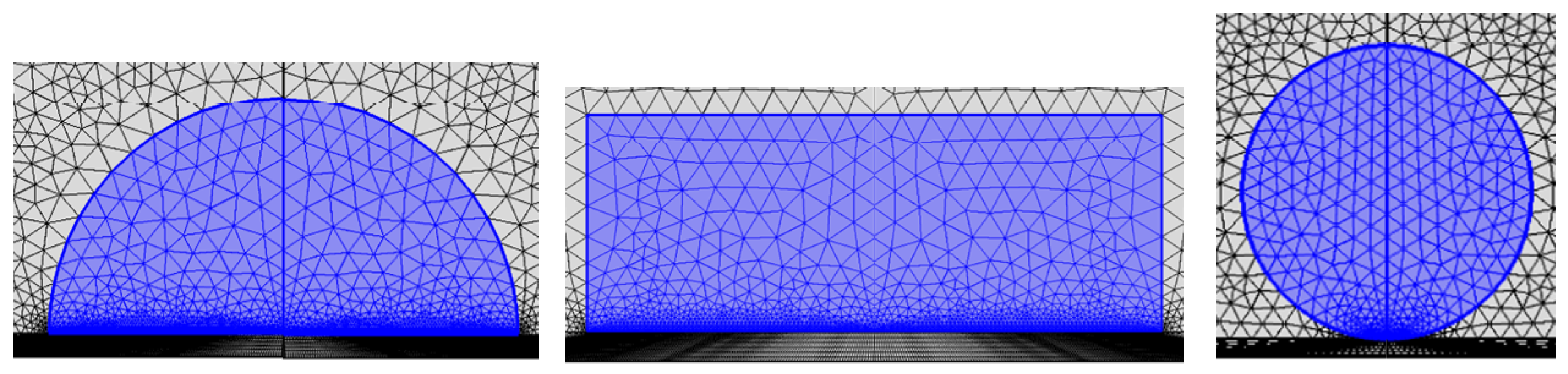
3. COMSOL Model and Its Calculations
4. Vibrational Response of the OBS
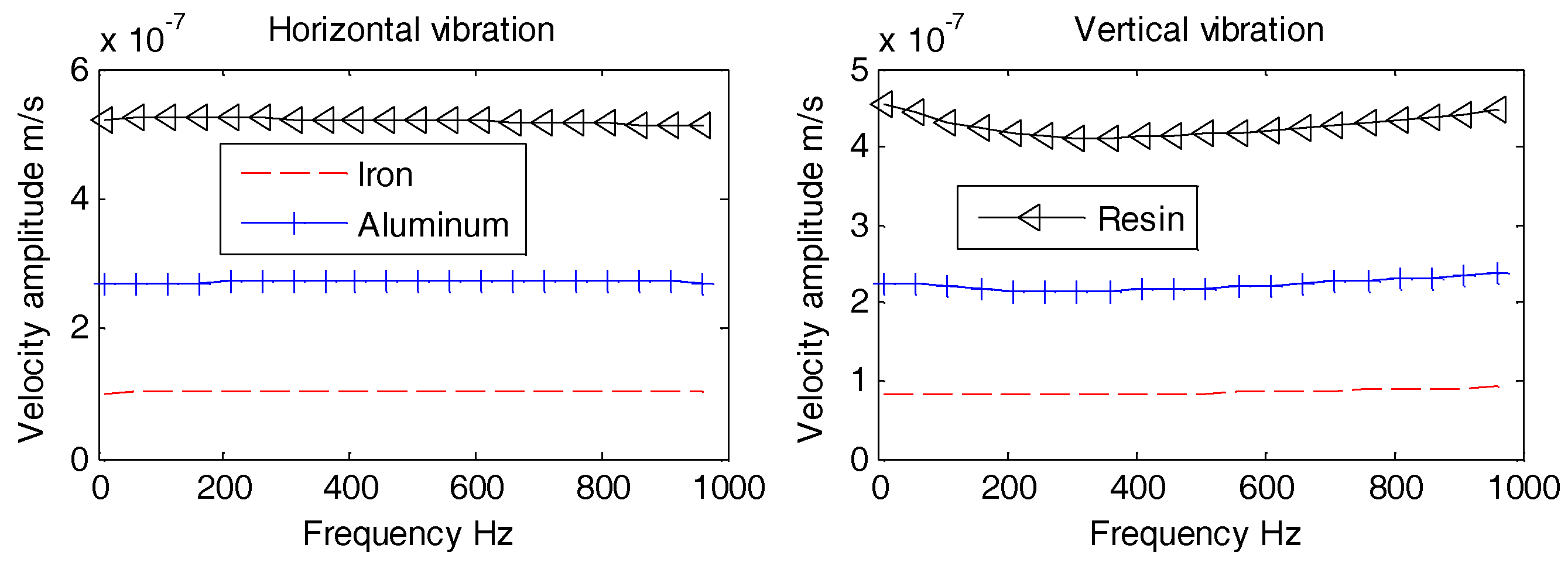
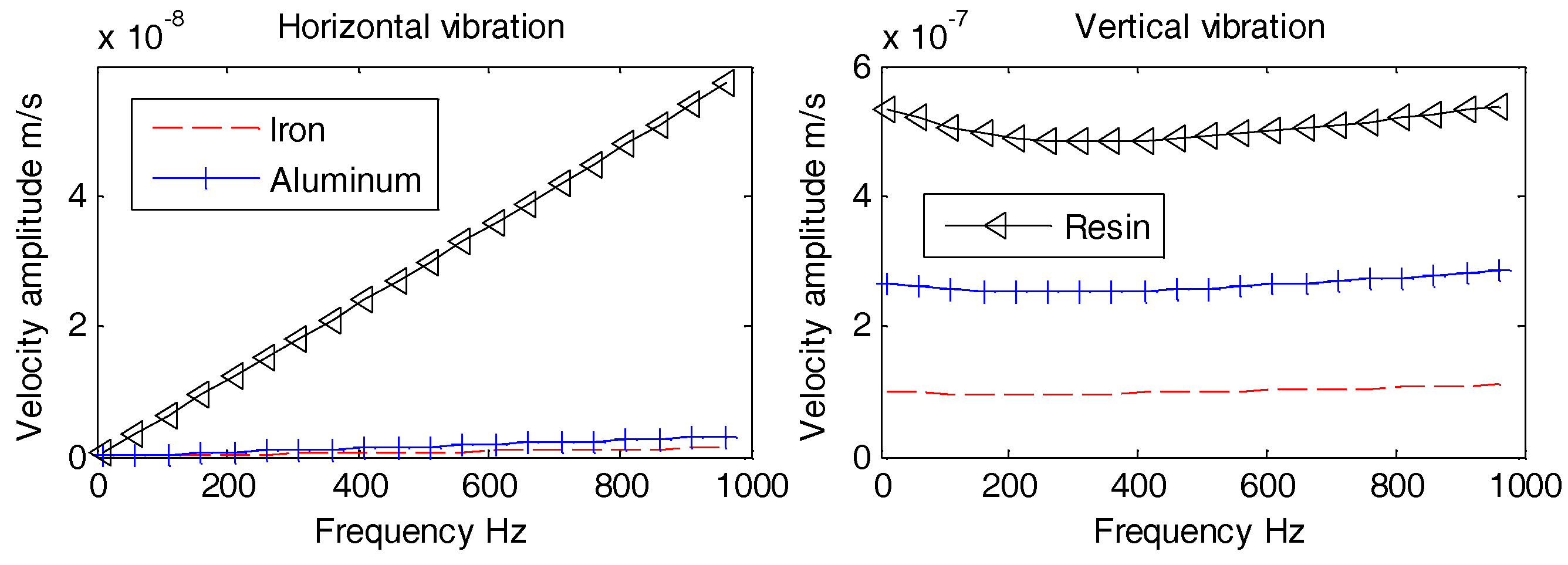
4.1. Vibration Velocities of the OBS with Varies Density Exposed to the Underwater Noise
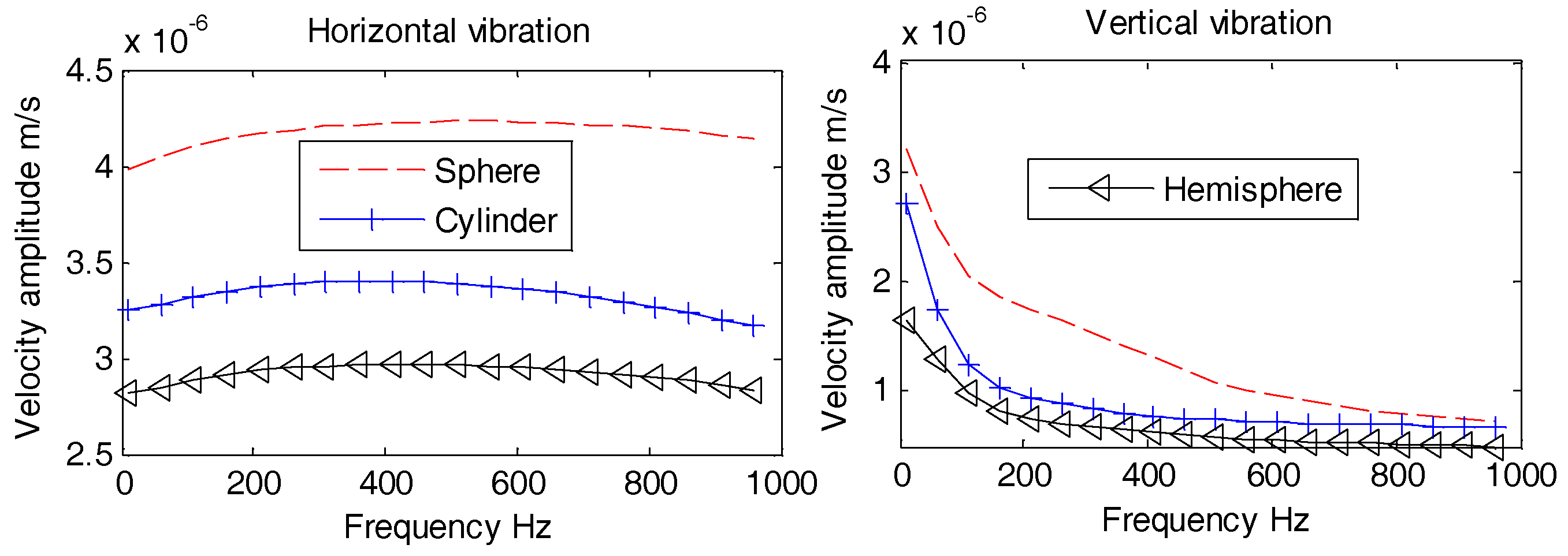
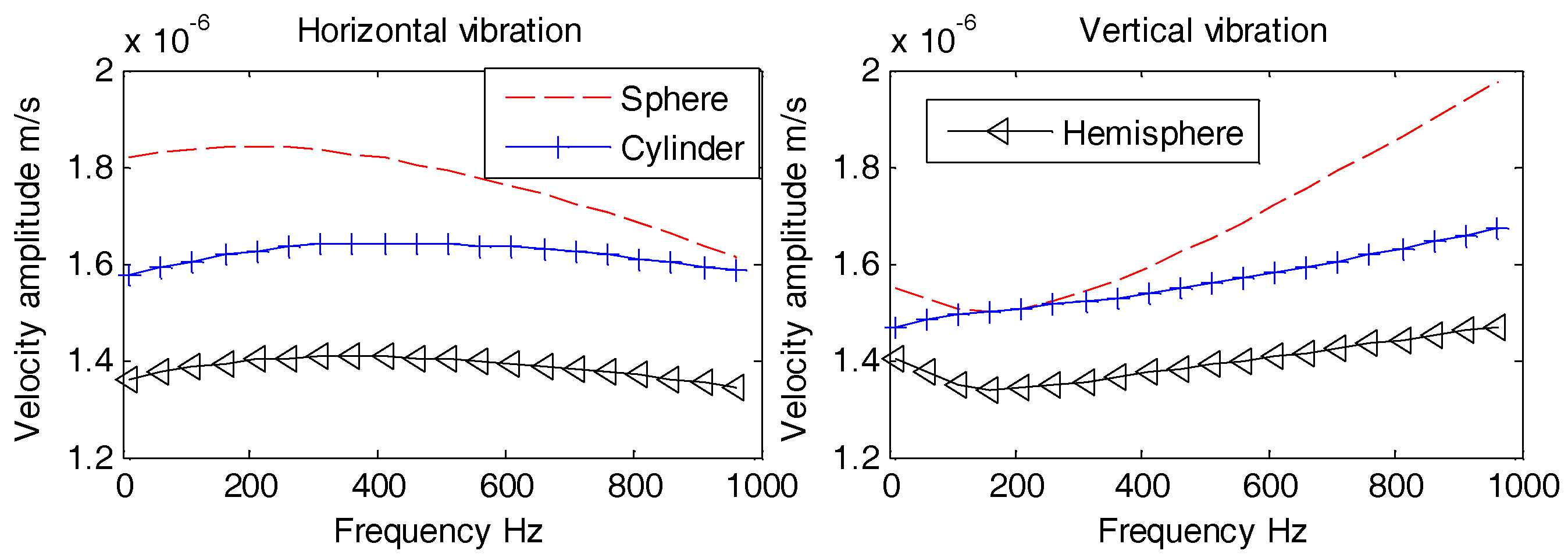
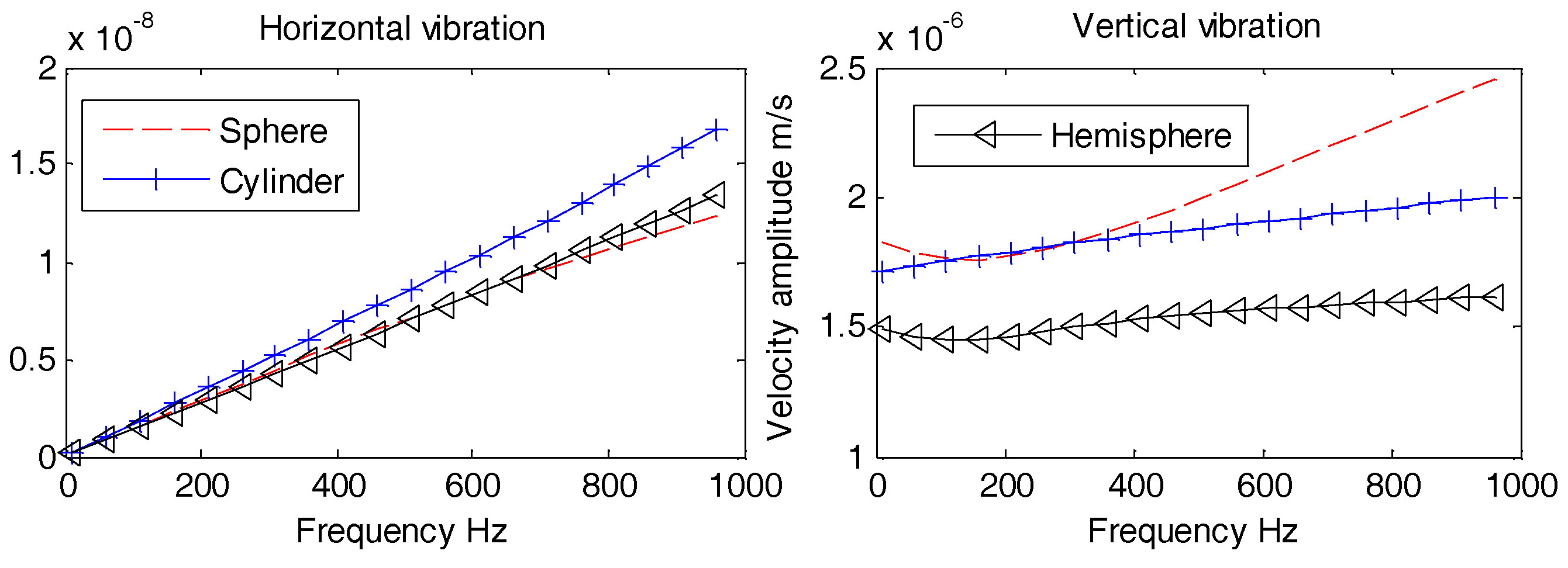
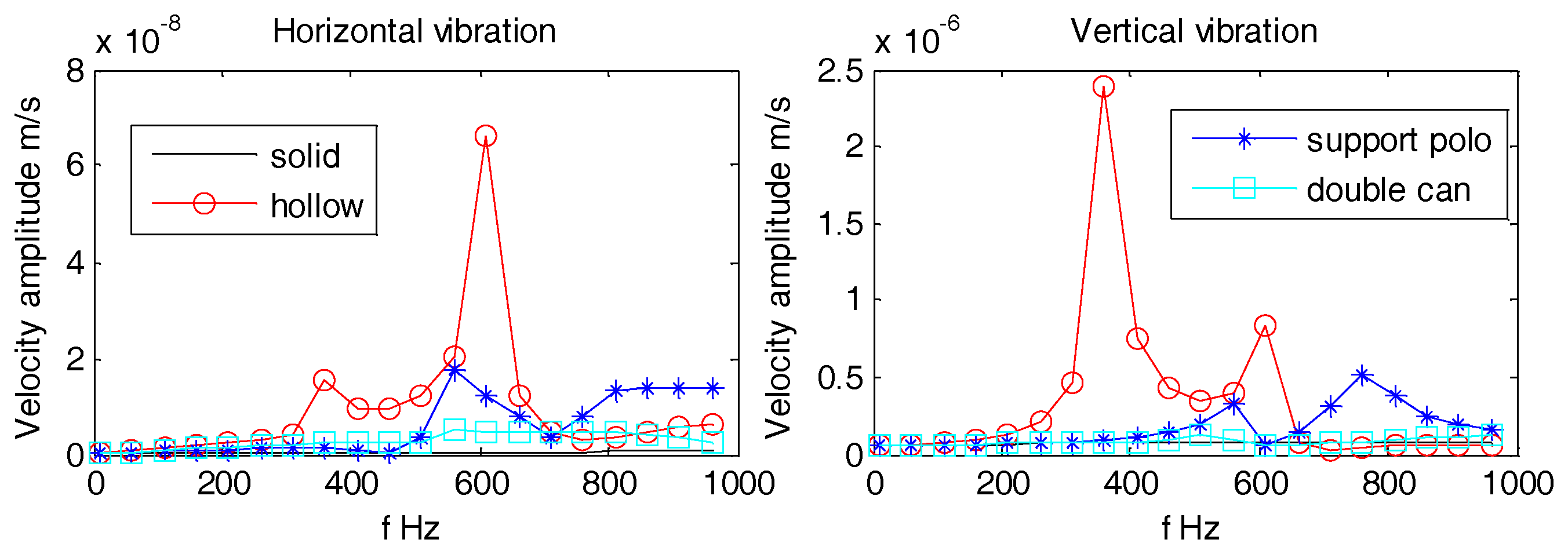
4.2. Vibration Velocities of the OBSs with Various Shapes Exposed to the Underwater Noise
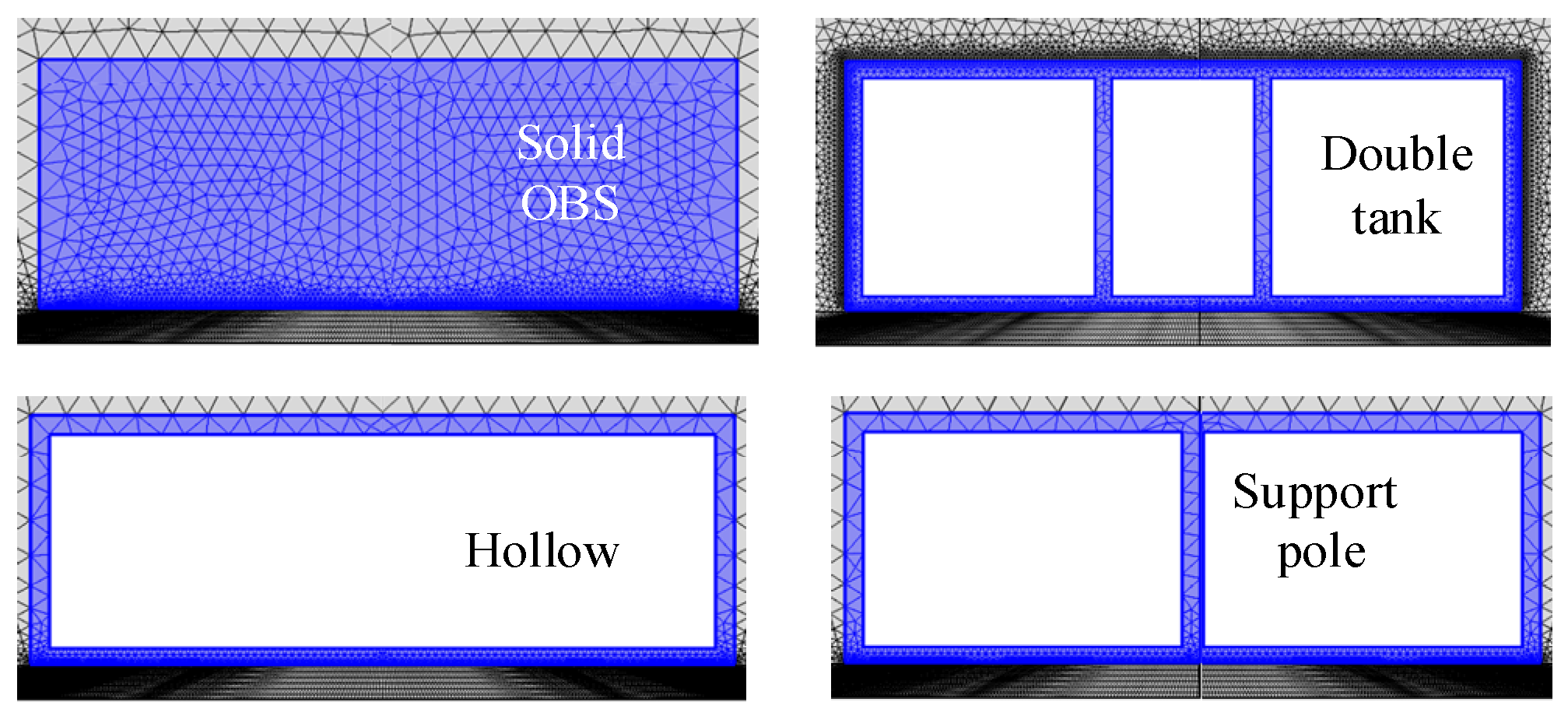
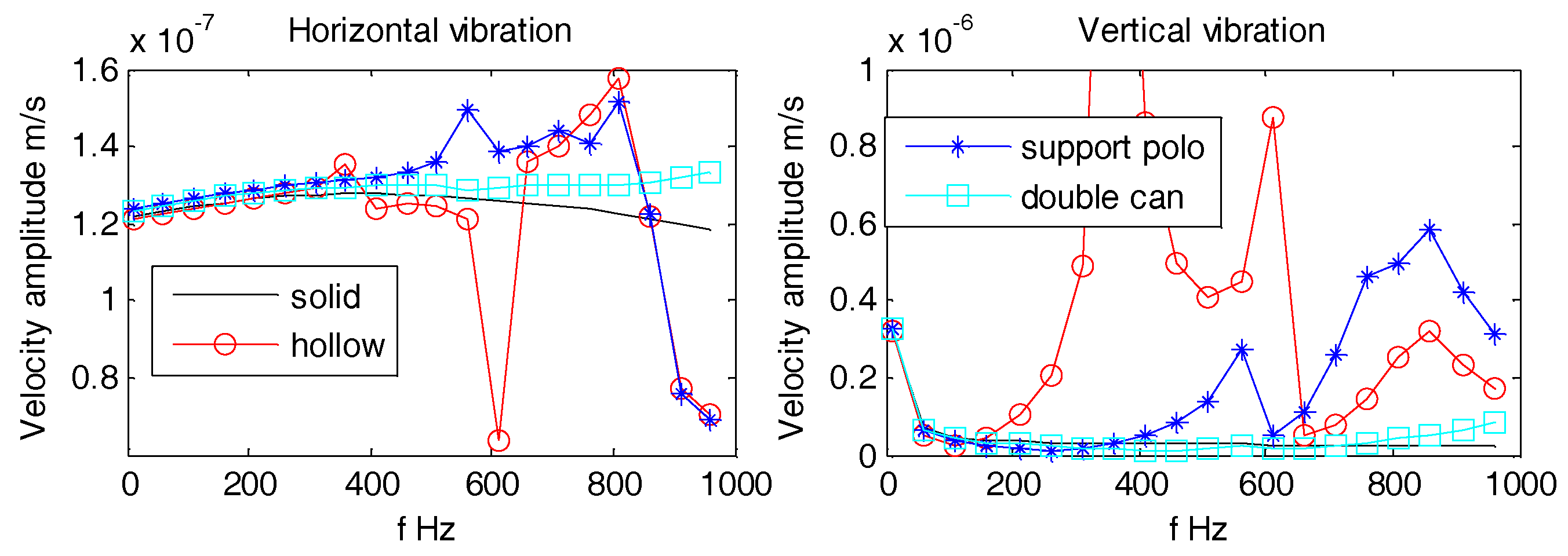
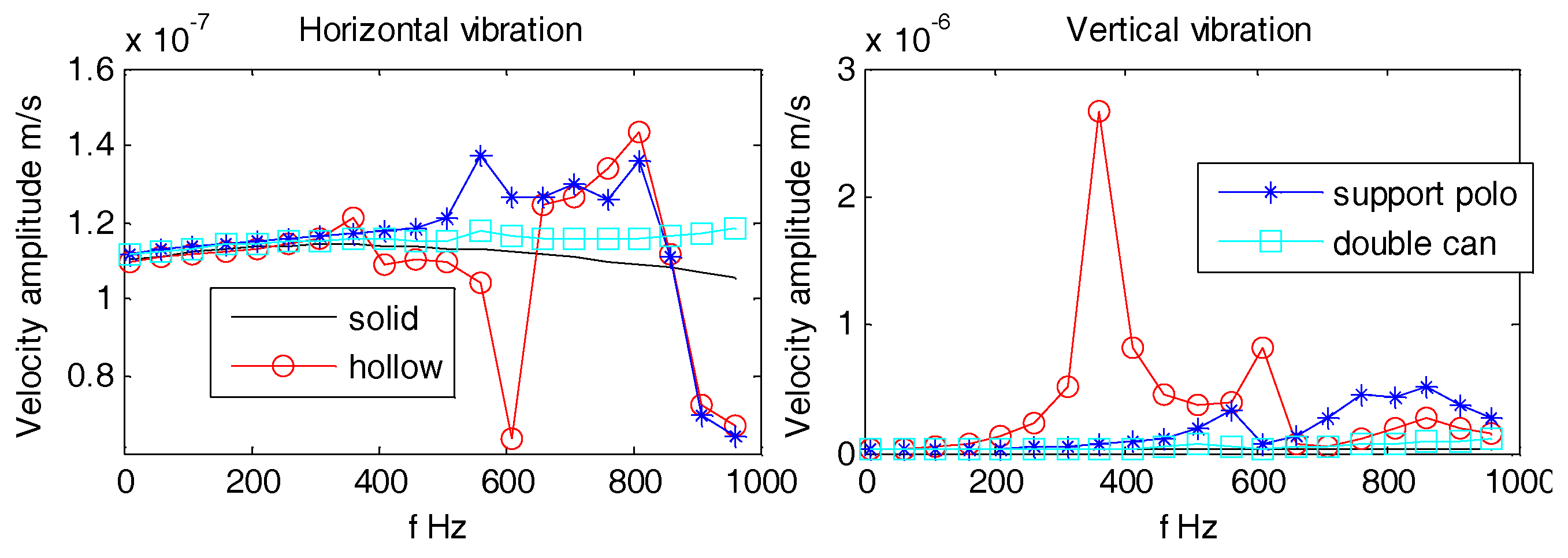
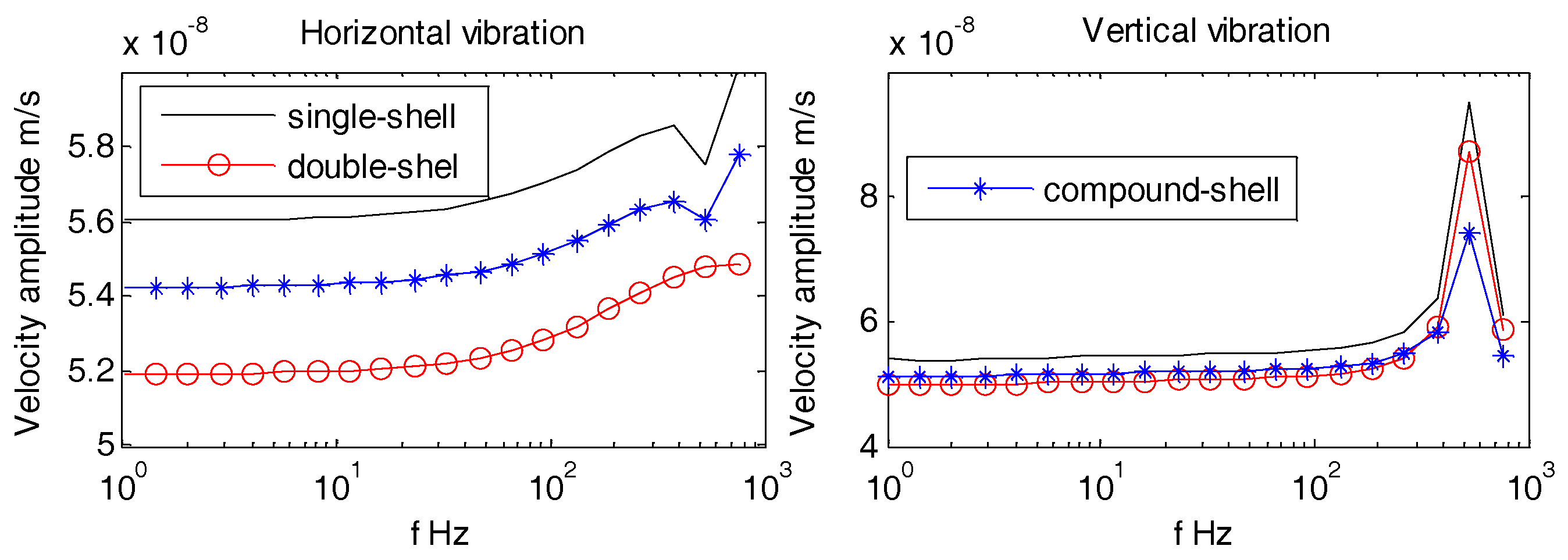
4.3. Vibration Velocities of the OBSs with Different Internal Compartments Exposed to the Underwater Noise
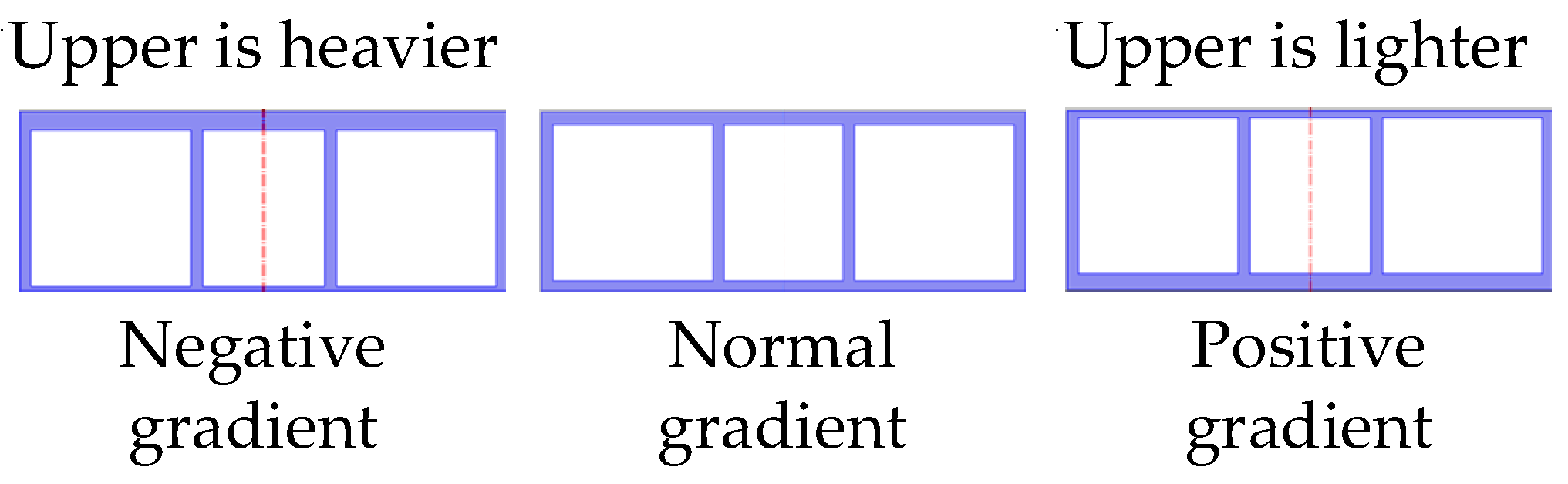
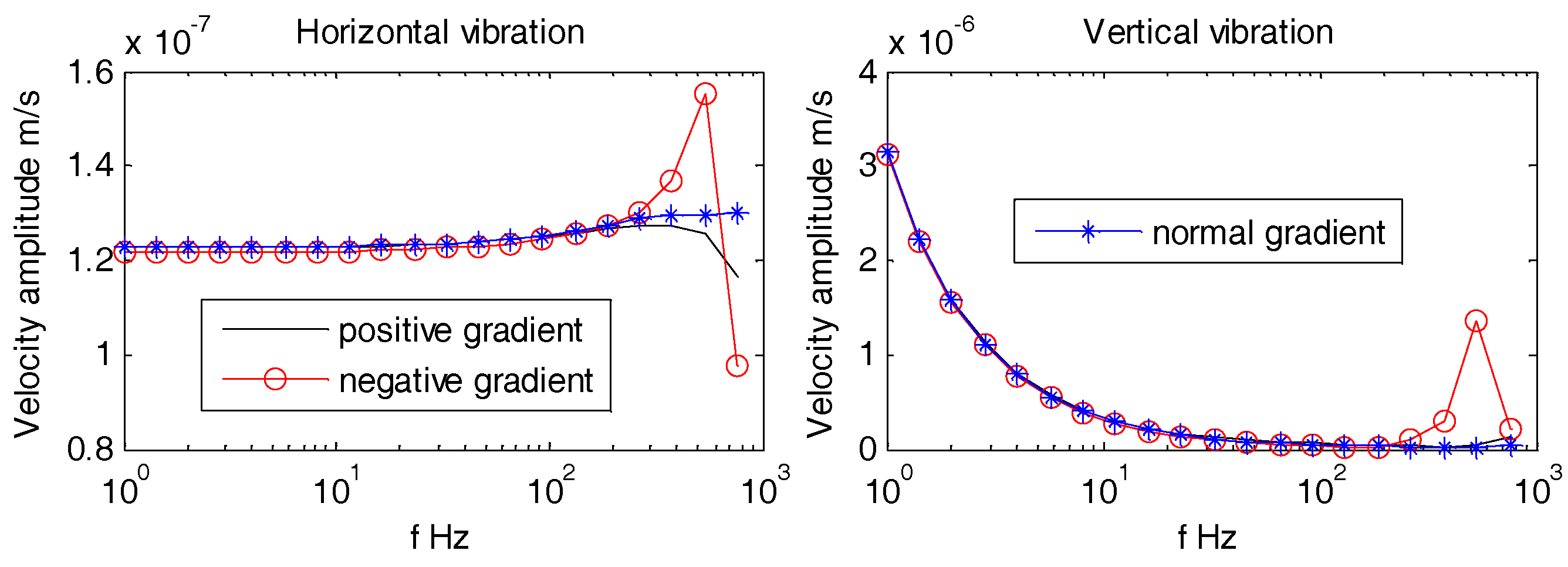
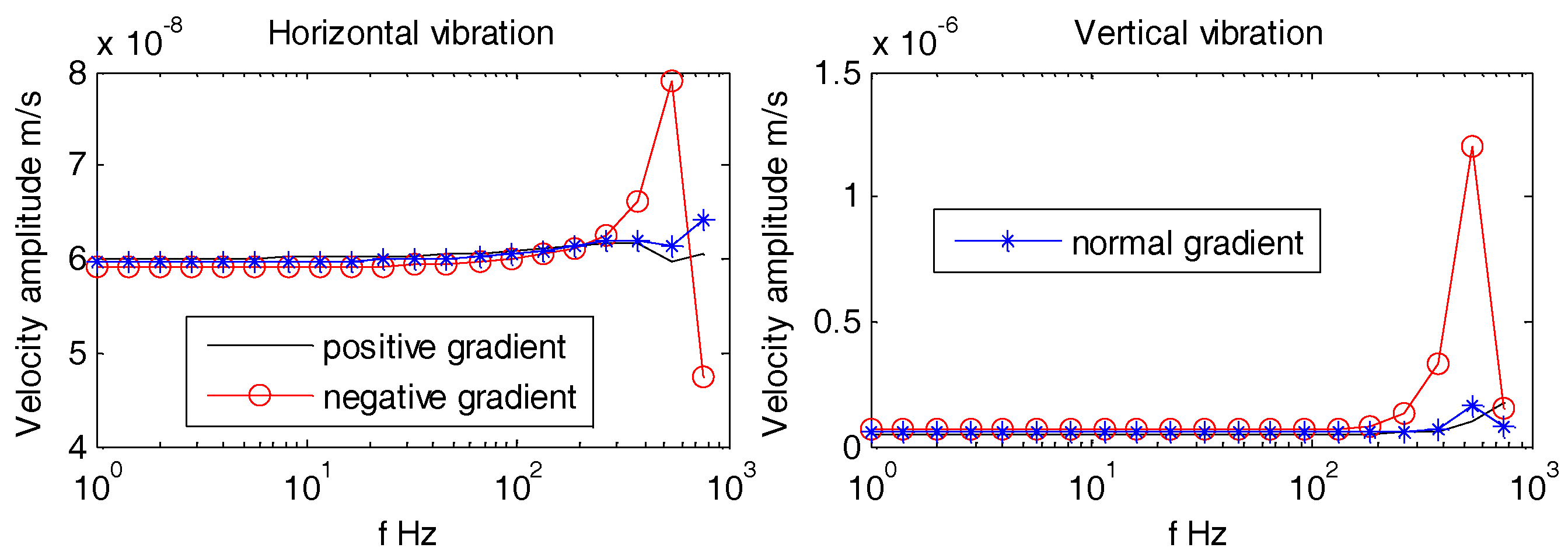
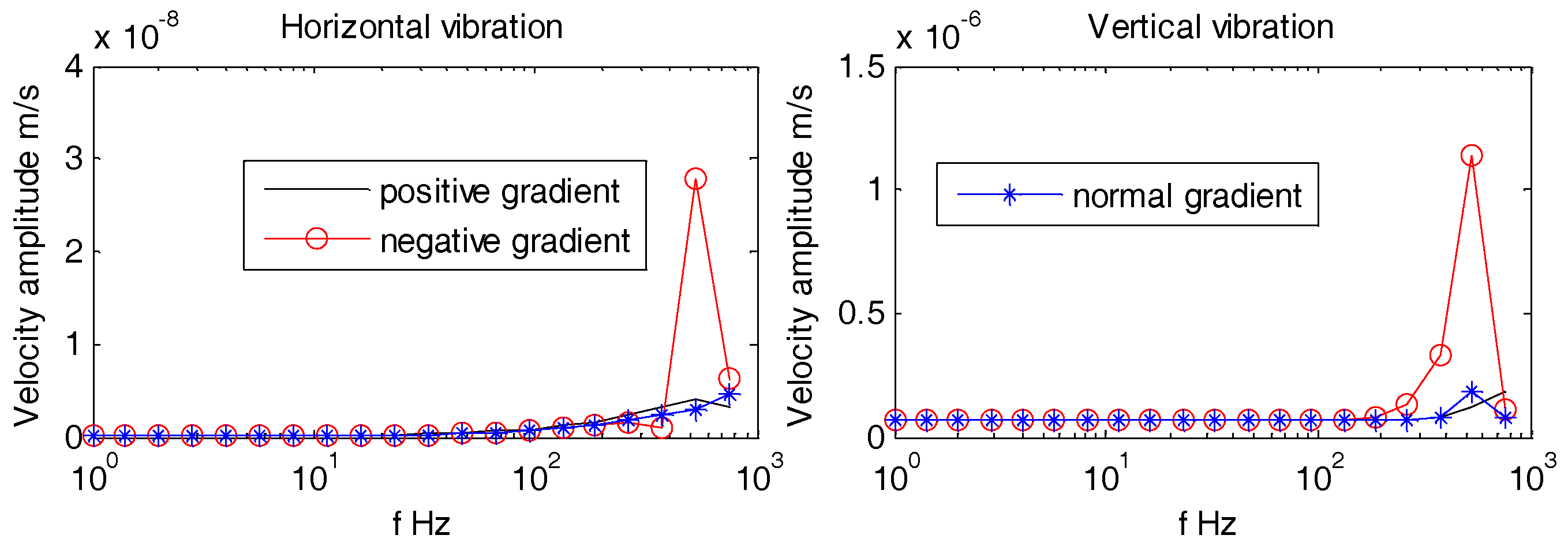
4.4. Vibration Velocities of the OBSs with Different Density Gradients Exposed to the Underwater Noise
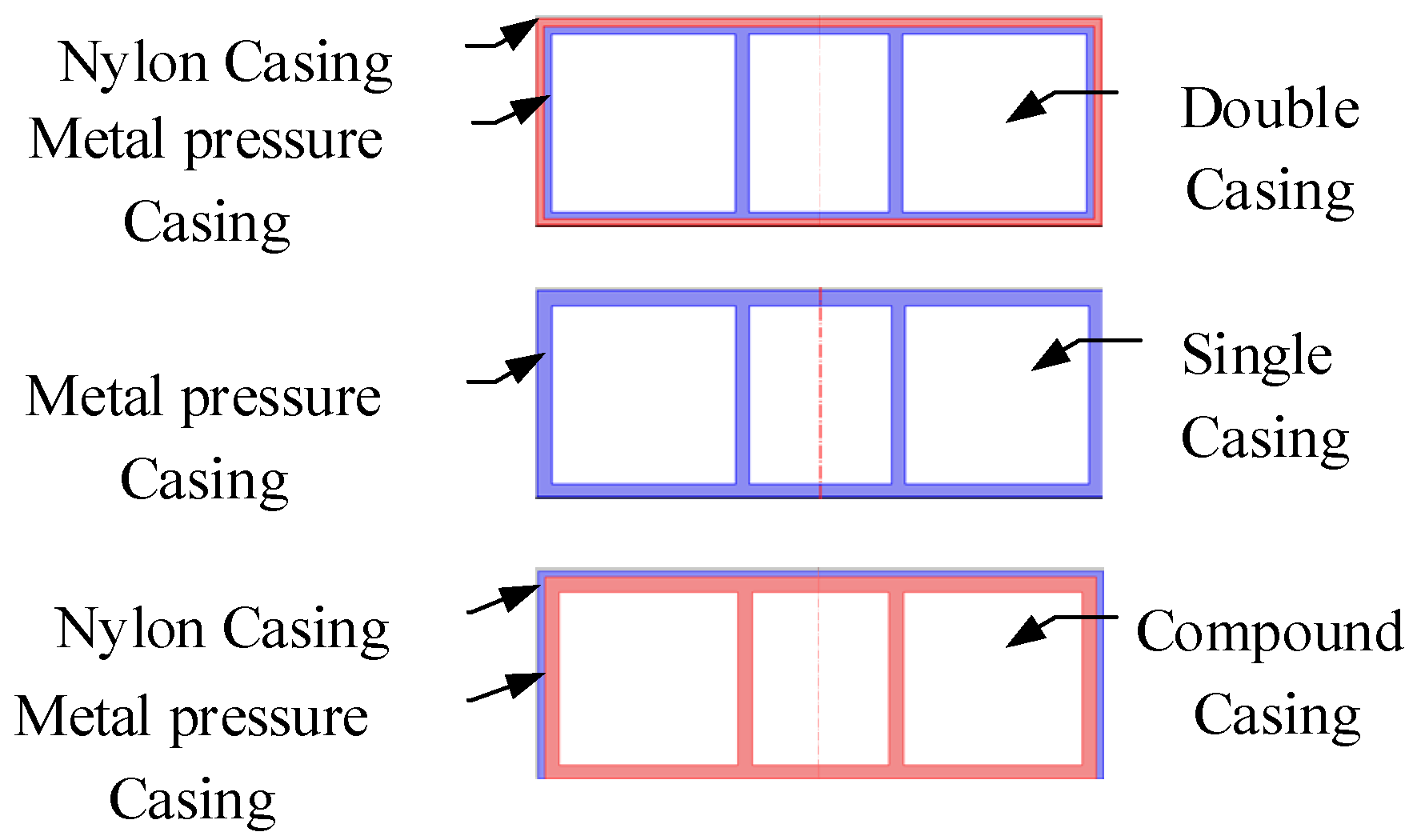
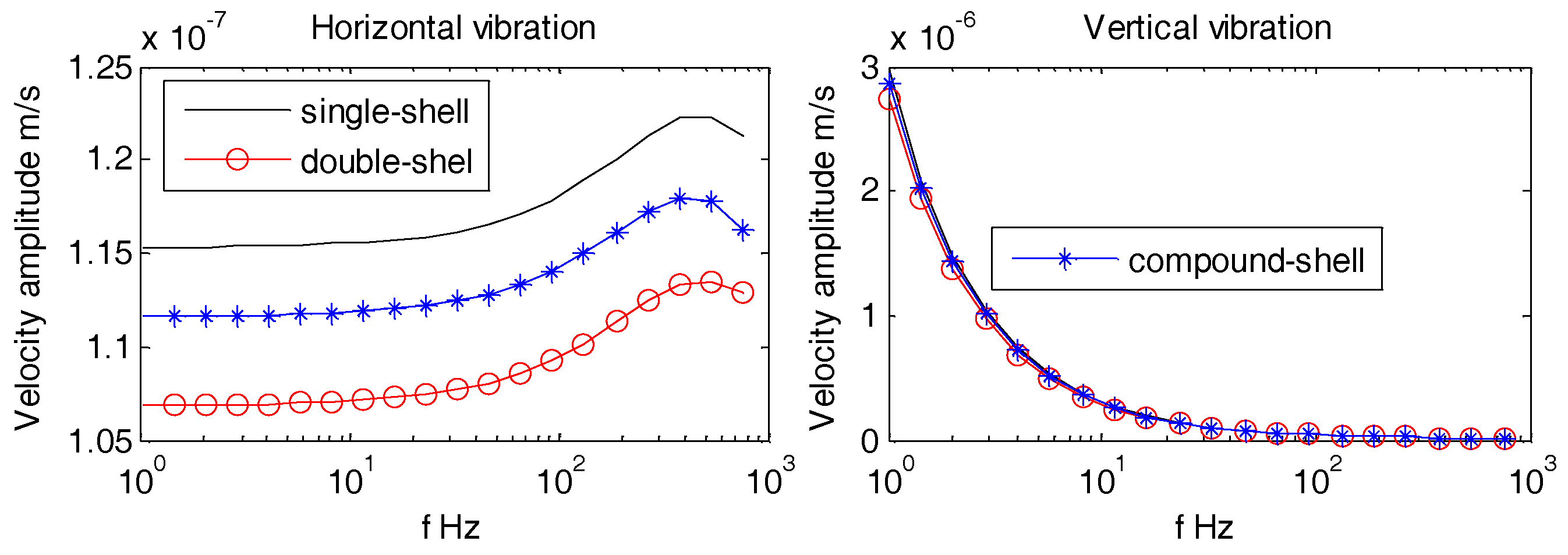
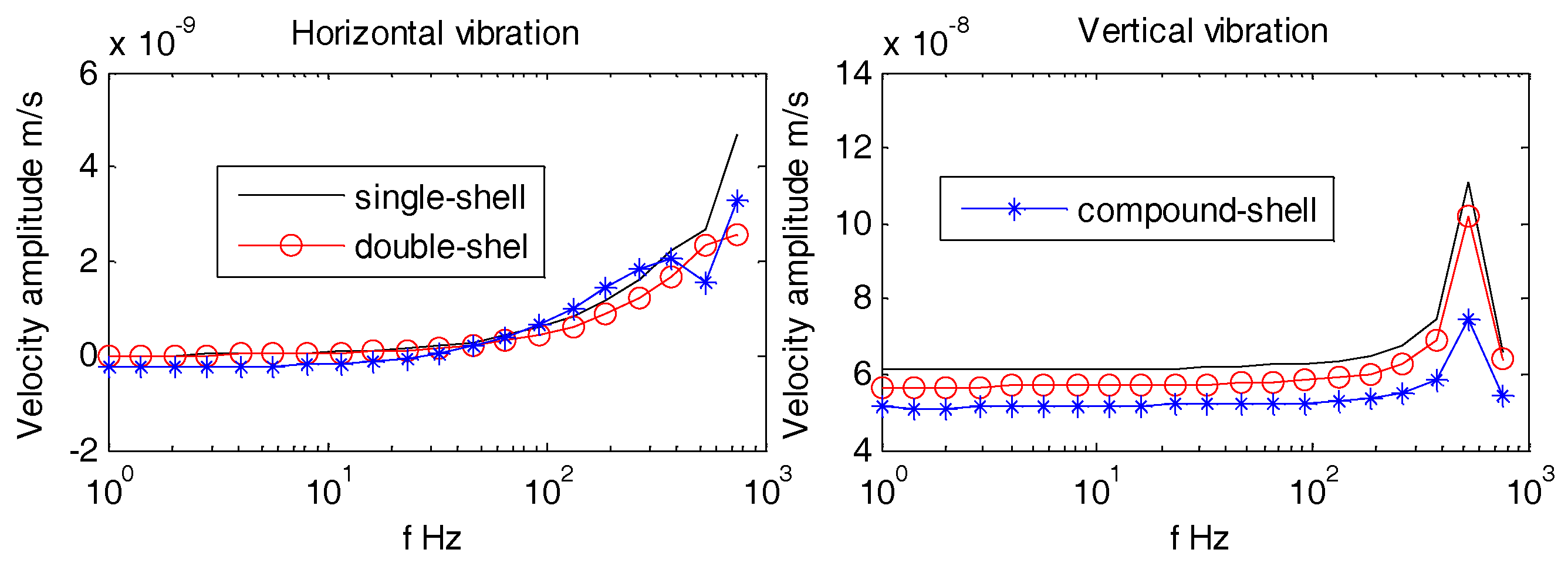
4.5. Vibration Velocities of OBSs with Different Outer Casings Exposed to the Underwater Noise
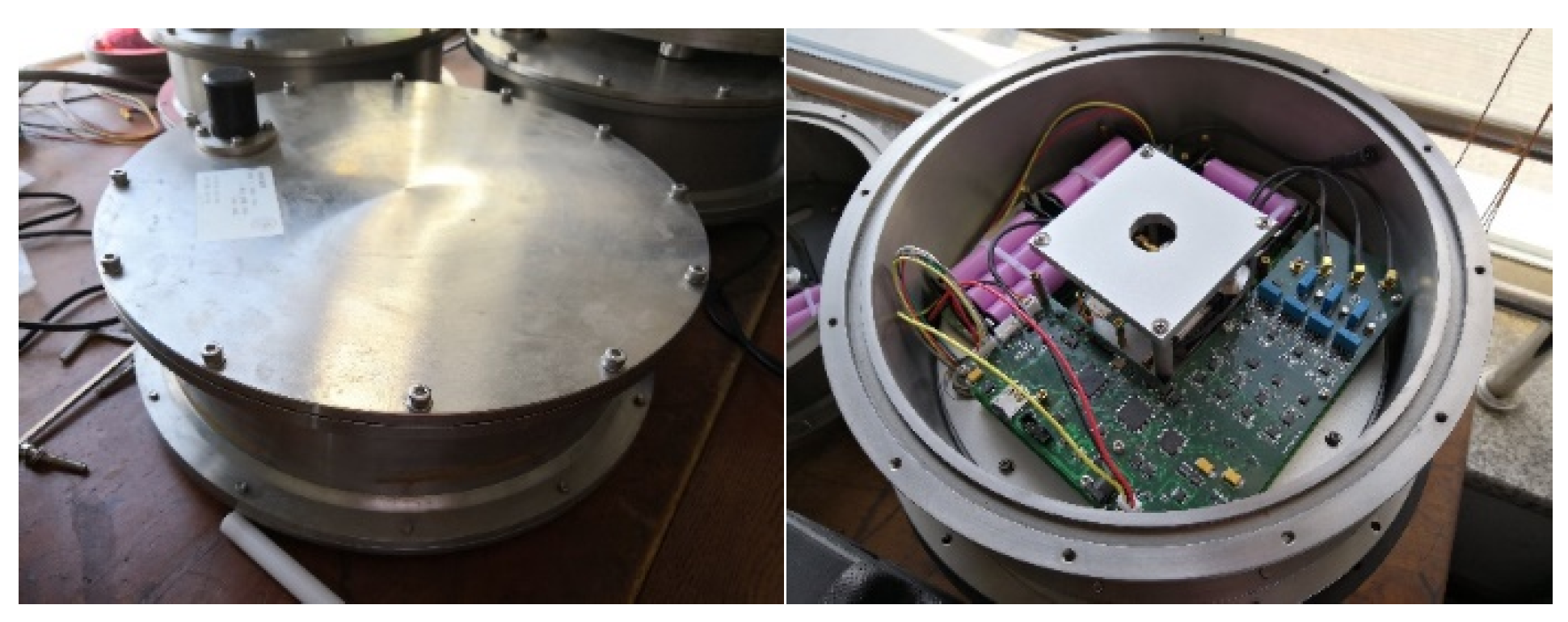
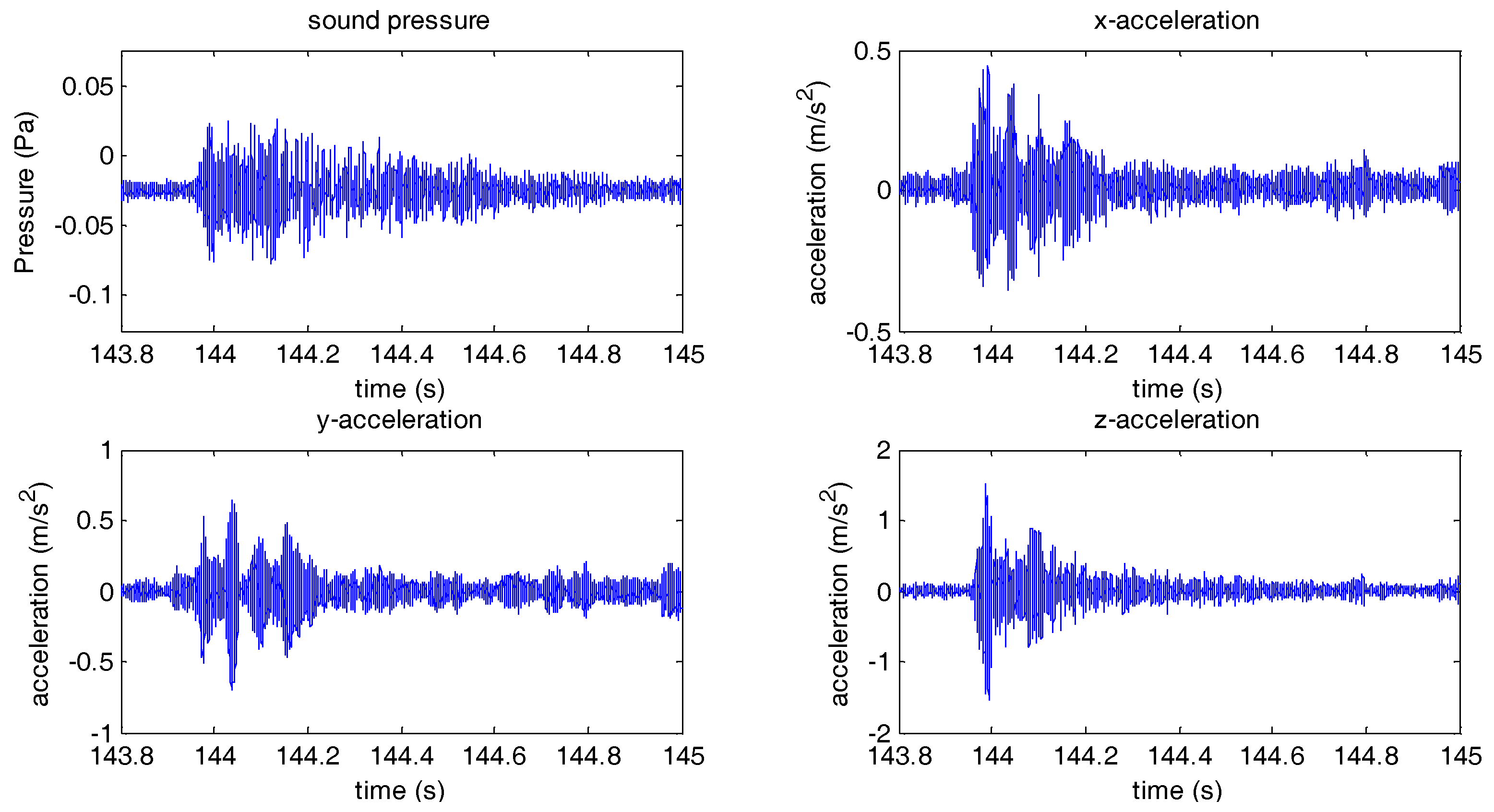
5. Experimentation in the Real-Sea Environment
6. Conclusions
- (1)
- The OBS with same shape and structure, but with heavier body, experience lower vibration velocity amplitudes for signal of either seismic waves or underwater noise. The average densities for both OBS and the sea-floor need to be similar at the experimentation site. A rocky seafloor with larger density is preferred for appropriate working of OBS.
- (2)
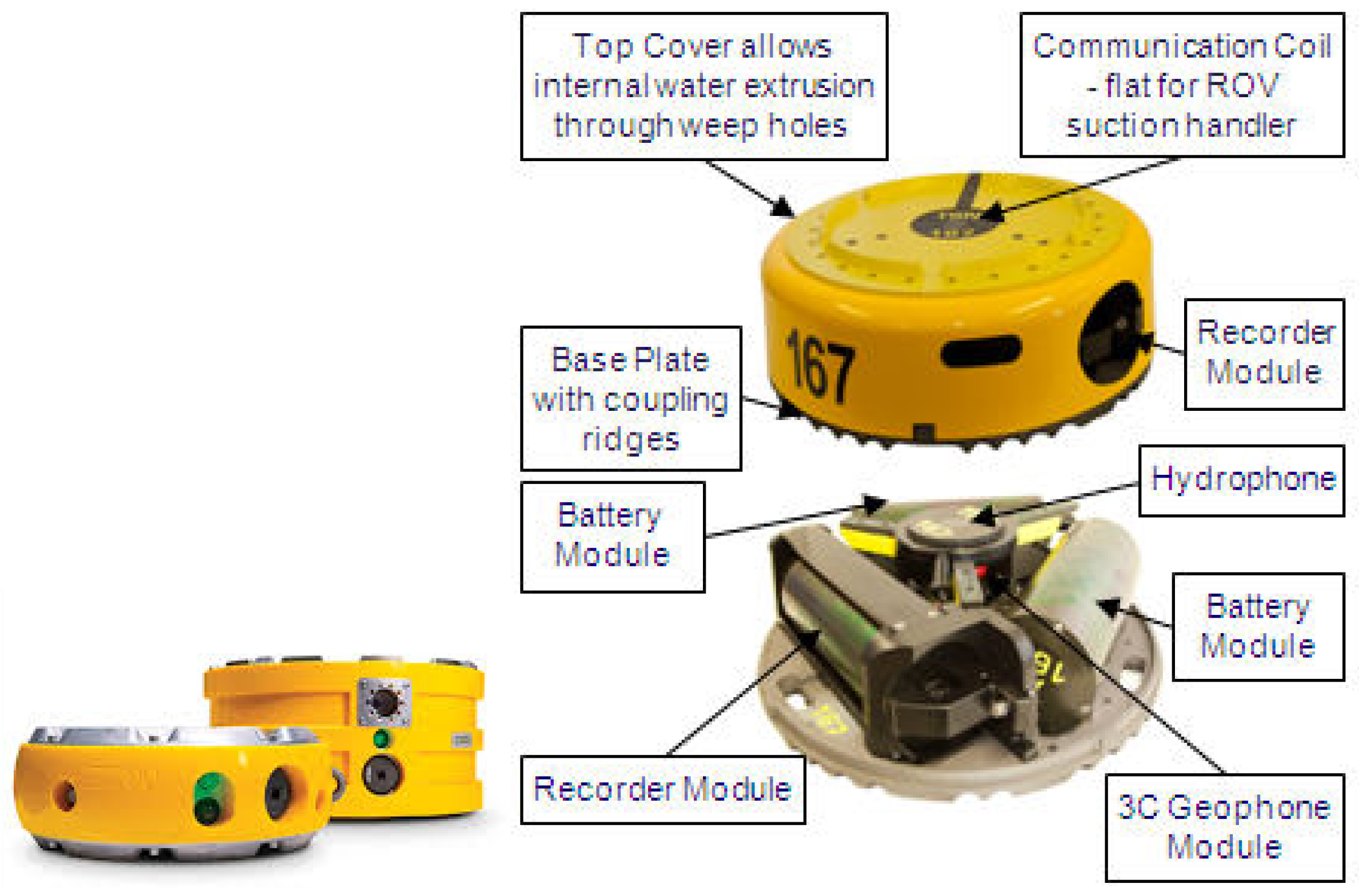
- Due to low ocean water pressure in shallow water, a cylindrical OBS is s used for our experimentation activity. Though the vibration velocity amplitudes of the hemispherical OBS is lower especially when it is exposed to underwater noise, but its overall design and development are quite expansive and complex. Thus the only option is cylindrical OBS during the experimentation in real-sea environment.
- (3)
- Designing the OBS for lower frequencies (<100 Hz) doesn’t take into account the configuration, density gradient, nor the type of outer casing.
- (4)
- For higher frequencies (>100 Hz), recommended design for development of OBS is in double-tank configuration. This design should be positive gradient with compound outer casing in order to reduce the vibration velocity amplitudes especially when the OBS is exposed to underwater noise.
Author Contributions
Funding
Conflicts of Interest
References
- Schmidt-Aursch, M.C.; Crawford, W.C. Ocean-Bottom Seismometer. Encycl. Earthquake Eng. 2014, 41–46. [Google Scholar] [CrossRef]
- Manuel, A.; Roset, X.; Del Rio, J.; Toma, D.M.; Carreras, N.; Panahi, S.S.; Garcia-Benadi, A.; Owen, T.; Cadena, J. Ocean bottom seismometer: Design and test of a measurement system for marine seismology. Sensors 2012, 12, 3693–3719. [Google Scholar] [CrossRef] [PubMed]
- Duennebier, F.K.; Sutton, G.H. Fidelity of ocean bottom seismic observations. Mar. Geophys. Res. 1995, 17, 535–555. [Google Scholar] [CrossRef]
- Sha, Z.; Zheng, T.; Zhang, G.; Liu, X.; Wu, Z.; Liang, J.; Su, P.; Wang, J. An optimal design of a high-frequency ocean bottom seismometer (hf-obs) and its application to the natural gas hydrate exploration in the South China Sea. Nat. Gas Ind. 2014, 34, 136–142. [Google Scholar]
- Roset, X.; Trullols, E.; Artero-Delgado, C.; Prat, J.; Del Rio, J.; Massana, I.; Carbonell, M.; Barco de la Torre, J.; Toma, D.M. Real-time seismic data from the bottom sea. Sensors 2018, 18, 1132. [Google Scholar] [CrossRef] [PubMed]
- Ewing, M.; Vine, A.; Worzel, J.L. Photography of the ocean bottom. J. Opt. Soc. Am. 1946, 36, 307. [Google Scholar] [CrossRef]
- You, Q. Development of a Micro Power Seabed Seismograph; Institute of Geology and Geophysics, Chinese Academy of Sciences: Beijing, China, 2002. [Google Scholar]
- Xia, C. A Study on Data Processing Method of Ocean Bottom Seismograph; Chang’an University Beijing: Beijing, China, 2009. [Google Scholar]
- Mantouka, A.; Felisberto, P.; Santos, P.; Zabel, F.; Saleiro, M.; Jesus, S.M.; Sebastiao, L. Development and testing of a dual accelerometer vector sensor for auv acoustic surveys. Sensors 2017, 17, 1328. [Google Scholar] [CrossRef] [PubMed]
- Shariat-Panahi, S.; Alegria, F.; Mànuel, A. Design and test of a high resolution acquisition system for marine seismology. IEEE Instrum. Meas. Mag. 2009, 12, 8–15. [Google Scholar] [CrossRef]
- Zhao, A.; Bi, X.; Hui, J.; Zeng, C.; Ma, L. Application and extension of vertical intensity lower-mode in methods for target depth-resolution with a single-vector sensor. Sensors 2018, 18, 2073. [Google Scholar] [CrossRef] [PubMed]
- Bookbinder, R.; Hubbard, A.; Pomeroy, P. Design of an ocean bottom seismometer with response from 25 Hz to 100 seconds 1. In Proceedings of the Oceans’78, Washington, DC, USA, 6–8 September 1978; pp. 510–515. [Google Scholar]
- Mangano, G.; D’Alessandro, A.; D’Anna, G. Long term underwater monitoring of seismic areas: Design of an ocean bottom seismometer with hydrophone and its performance evaluation. In Proceedings of the OCEANS 2011 IEEE, Santander, Spain, 6–9 June 2011; pp. 1–9. [Google Scholar]
- Paffenholz, J.; Shurtleff, R.; Hays, D.; Docherty, P. Shear wave noise on obs vz data—Part I evidence from field data. In Proceedings of the 68th EAGE Conference and Exhibition Incorporating SPE EUROPEC, Vienna, Austria, 12–15 June 2006. [Google Scholar]
- He, Z.; Zhao, Y. Acoustic Theory Foundation; National Defense Industry Press: Beijing, China, 1981. [Google Scholar]
- Urick, R.J. Principles of Underwater Sound; McGraw-Hill: New York, NY, USA, 1983. [Google Scholar]
- Zhang, H.G. Research on Modeling and Rule of Infrasound Propagation in Shallow Sea. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2010. [Google Scholar]
- Hughes, T.J.R. Finite element method: Linear static and dynamic. Religion 1987, 6, 222. [Google Scholar]
- Faran, J.J. Sound scattering by solid cylinders and spheres. J. Acoust. Soc. Am. 1951, 23, 405–418. [Google Scholar] [CrossRef]
- Hickling, R. Analysis of echoes from a solid elastic sphere in water. J. Acoust. Soc. Am. 1962, 34, 1582–1592. [Google Scholar] [CrossRef]
- Bishop, G.C.; Smith, J. Scattering from an elastic shell and a rough fluid–elastic interface: Theory. J. Acoust. Soc. Am. 1997, 101, 767–788. [Google Scholar] [CrossRef]
- Zampolli, M.; Jensen, F.B.; Tesei, A. Benchmark problems for acoustic scattering from elastic objects in the free field and near the seafloor. J. Acoust. Soc. Am. 2009, 125, 89–98. [Google Scholar] [CrossRef] [PubMed]
- Fawcett, J.A.; Fox, W.L.J.; Maguer, A. Modeling of scattering by objects on the seabed. J. Acoust. Soc. Am. 1998, 104, 3296–3304. [Google Scholar] [CrossRef]
- Pdf, L. Comsol Multiphysics® Version 5.4 User Guide. 2018. [Google Scholar]
- Roset, X.; Carbonell, M.; Mànuel, A.; Gomáriz, S. Sea seismometer coupling on the sediment. In Proceedings of the XIX IMEKO World Congress Fundamental and Applied Metrology, Lisbon, Portugal, 6–11 September 2009; pp. 2010–2013. [Google Scholar]
- Sutton, G.H.; Duennebier, F.K. Optimum design of ocean bottom seismometers. Mar. Geophys. Res. 1987, 9, 47–65. [Google Scholar]






































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | WHOI Hole-D2 | IRD-UTIG | Micro OBS | I-7C |
|---|---|---|---|---|
| Nationality | USA | USA | Germany | China |
| Channels | 4 | 4 | 3 | 7 |
| Release | electrolytic | electrolytic | electrolytic | mechanic |
| Consume (W) | 1 | 0.5 | 0.6 | 0.25 |
| Autonomy (h) | 60 | 60 | 10 | 120 |
| Weight (kg) | 73 | 85 | 10 | 45 |
| Height/width/length (m) | 1 × 1 × 0.56 | 0.6 × 1 × 1 | 0.4× 0.4 × 0.4 | 1.5 × 1.5 × 0.8 |
| Material | Density (kg/m3) | P-Waves (m/s) | S-Waves (m/s) |
|---|---|---|---|
| Water | 1000 | 1500 | 0 |
| PML | 1000 | 1500 | 0 |
| OBS | 7850 | 5848 | 3233 |
| Material | Density (kg/m3) | P-Wave (m/s) | S-Wave (m/s) |
|---|---|---|---|
| Sediment(silt) | 1800 | 1600 | 0 |
| Material | Density (kg/m3) | P-Waves (m/s) | S-Waves (m/s) |
|---|---|---|---|
| Iron | 7850 | 5848 | 3233 |
| Resin | 1180 | 2695 | 1100 |
| Aluminum | 2700 | 6198 | 3122 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Piao, S.; Lei, Y.; Li, N. In Design of an Ocean Bottom Seismometer Sensor: Minimize Vibration Experienced by Underwater Low-Frequency Noise. Sensors 2018, 18, 3446. https://doi.org/10.3390/s18103446
Wang X, Piao S, Lei Y, Li N. In Design of an Ocean Bottom Seismometer Sensor: Minimize Vibration Experienced by Underwater Low-Frequency Noise. Sensors. 2018; 18(10):3446. https://doi.org/10.3390/s18103446
Chicago/Turabian StyleWang, Xiaohan, Shengchun Piao, Yahui Lei, and Nansong Li. 2018. "In Design of an Ocean Bottom Seismometer Sensor: Minimize Vibration Experienced by Underwater Low-Frequency Noise" Sensors 18, no. 10: 3446. https://doi.org/10.3390/s18103446
APA StyleWang, X., Piao, S., Lei, Y., & Li, N. (2018). In Design of an Ocean Bottom Seismometer Sensor: Minimize Vibration Experienced by Underwater Low-Frequency Noise. Sensors, 18(10), 3446. https://doi.org/10.3390/s18103446