An Optimized Relay Selection Technique to Improve the Communication Reliability in Wireless Sensor Networks †


 ,
,  and
and 
Abstract
1. Introduction
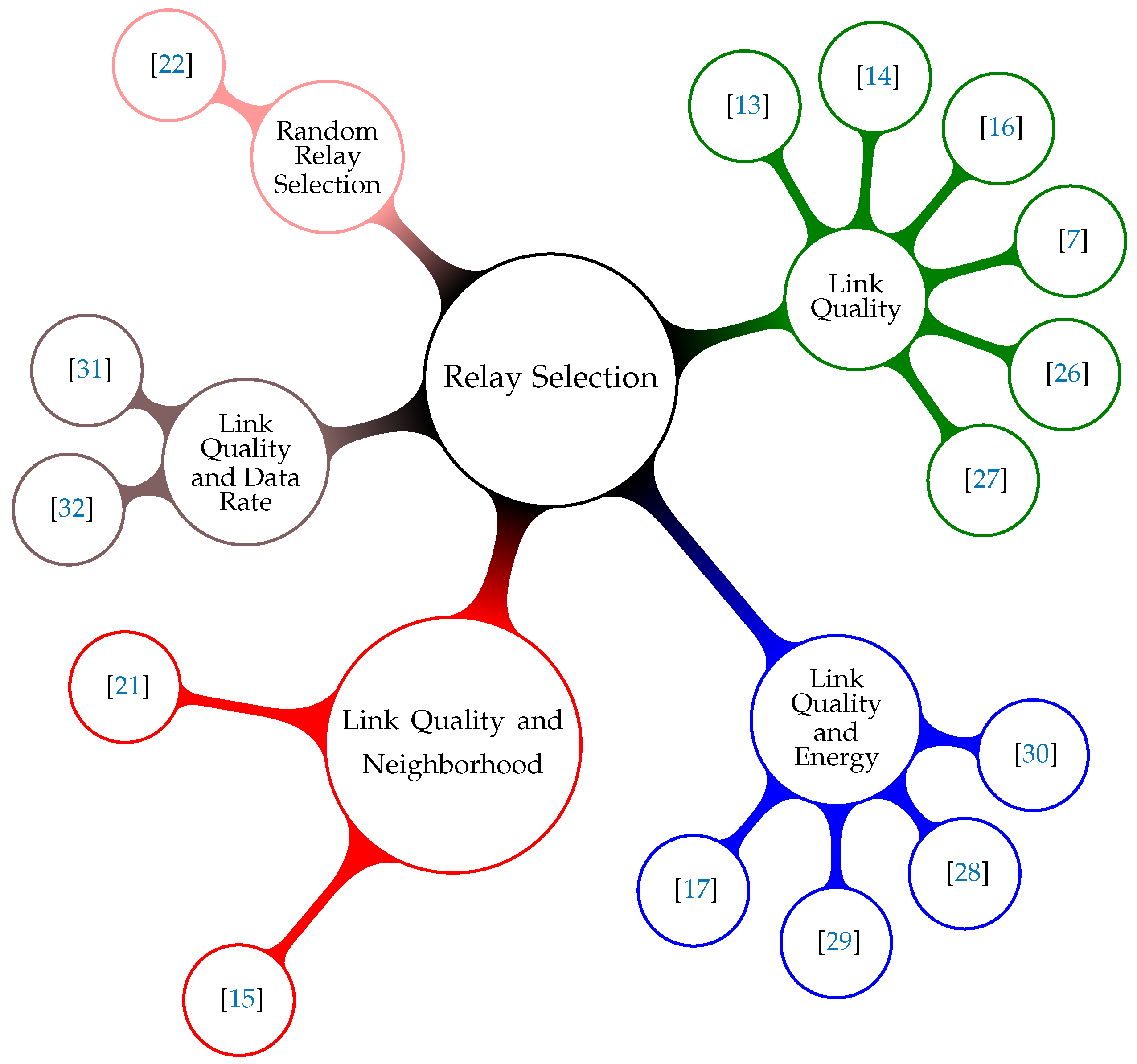
2. Related Work
2.1. Link Quality Based
2.2. Link Quality and Neighborhood Based
2.3. Link Quality and Energy Based
2.4. Link Quality and Data Rate Based
2.5. Random Relay Selection
2.6. Wrap-Up
3. ORST-Optimized Relay Selection Technique
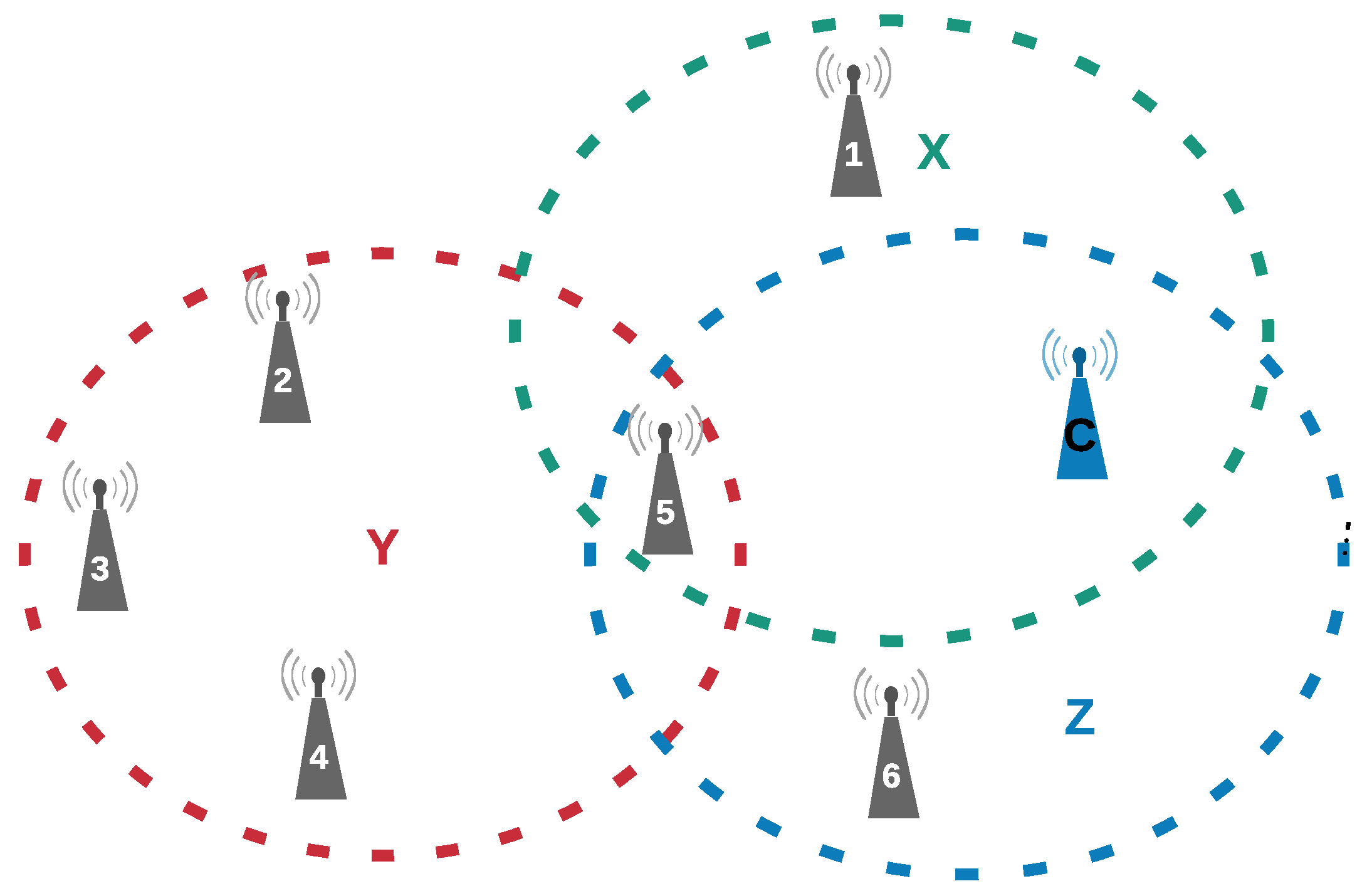
3.1. System Model
3.2. Brief Explanation of the Relay Selection Operation
3.3. Problem Formulation
- is the benefit value of node ;
- is the total number of neighbors of node ;
- , where is the remaining energy and is the initial energy of node , respectively. The value is the normalized remaining energy of node (an integer value between 0 and 1);
- , where is the Received Signal Strength Indicator (RSSI) among node and its neighbors nodes , and the constant is the minimum value of RSSI for an adequate communication ( dBm [39]).
- is the history of successful transmission rates adjusted at each beacon interval. The value of variable is adjusted according to each case, being defined between ; variable is equal to 1 in case of a successful transmission of node or 0 otherwise;
- are the weights of each parameter for the objective function.
3.4. Relay Updating Schemes
4. Simulation Assessment
4.1. Characteristics of the Model Implementation
4.2. Simulation Settings
4.3. Compared Techniques
- is the number of nodes that the coordinator is able to listen, considering the RSSI lower bound of dBm;
- is the number of nodes that the coordinator is not able to hear;
- is the maximum number of relay nodes that can be selected; this upper bound was set to 40, as previously mentioned in Section 3.
4.4. Simulation Assessment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of Things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef]
- Lazarescu, M.T. Design of a WSN platform for long-term environmental monitoring for IoT applications. IEEE J. Emerg. Sel. Top. Circuits Syst. 2013, 3, 45–54. [Google Scholar] [CrossRef]
- Han, G.; Zhou, L.; Wang, H.; Zhang, W.; Chan, S. A source location protection protocol based on dynamic routing in WSNs for the Social Internet of Things. Future Gener. Comput. Syst. 2018, 82, 689–697. [Google Scholar] [CrossRef]
- Li, X.; Niu, J.; Kumari, S.; Wu, F.; Sangaiah, A.K.; Choo, K.K.R. A three-factor anonymous authentication scheme for wireless sensor networks in internet of things environments. J. Netw. Comput. Appl. 2018, 103, 194–204. [Google Scholar] [CrossRef]
- Gungor, V.; Hancke, G. Industrial wireless sensor networks: Challenges, design principles, and technical approaches. IEEE Trans. Ind. 2009, 56, 4258–4265. [Google Scholar] [CrossRef]
- Vaseghi, B.; Pourmina, M.A.; Mobayen, S. Secure communication in wireless sensor networks based on chaos synchronization using adaptive sliding mode control. Nonlinear Dyn. 2017, 89, 1689–1704. [Google Scholar] [CrossRef]
- Valle, O.T.; Montez, C.; de Araujo, G.; Vasques, F.; Moraes, R. NetCoDer: A Retransmission Mechanism for WSNs Based on Cooperative Relays and Network Coding. Sensors 2016, 16, 799. [Google Scholar] [CrossRef] [PubMed]
- Nhon, T.; Kim, D.S. Relay Selection Scheme for Hierarchical Wireless Sensor Networks. Int. J. Control Autom. 2014, 7, 147–160. [Google Scholar] [CrossRef]
- Wang, C.L.; Syue, S.J. An Efficient Relay Selection Protocol for Cooperative Wireless Sensor Networks. In Proceedings of the IEEE Wireless Communications and Networking Conference, Budapest, Hungary, 5–8 April 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Khan, R.A.M.; Karl, H. MAC Protocols for Cooperative Diversity in Wireless LANs and Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2014, 16, 46–63. [Google Scholar] [CrossRef]
- Liang, X.; Balasingham, I.; Leung, V.C.M. Cooperative Communications with Relay Selection for QoS Provisioning in Wireless Sensor Networks. In Proceedings of the GLOBECOM 2009—2009 IEEE Global Telecommunications Conference, Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–8. [Google Scholar] [CrossRef]
- Jamal, T.; Mendes, P. Relay selection approaches for wireless cooperative networks. In Proceedings of the 6th IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Chengdu, China, 11–13 October 2010; pp. 661–668. [Google Scholar]
- Li, Y.; Yin, Q.; Xu, W.; Wang, H.M. On the Design of Relay Selection Strategies in Regenerative Cooperative Networks with Outdated CSI. IEEE Trans. Wirel. Commun. 2011, 10, 3086–3097. [Google Scholar] [CrossRef]
- Ferdouse, L.; Anpalagan, A. Relay Selection Based on Bayesian Decision Theory in Cooperative Wireless Networks Sélection de relais basée sur la théorie de décision de Bayes dans les réseaux sans fil coopératifs. Can. J. Electr. Comput. Eng. 2015, 38, 116–124. [Google Scholar] [CrossRef]
- Alkhayyat, A.; Gazi, O.; Sadkhan, S.B. The Role of Delay and Connectivity in Throughput Reduction of Cooperative Decentralized Wireless Networks. Math. Probl. Eng. 2015, 2015, 294016. [Google Scholar] [CrossRef]
- Marchenko, N.; Andre, T.; Masood, W.; Bettstetter, C. An Experimental Study of Selective Cooperative Relaying in Industrial Wireless Sensor Networks. IEEE Trans. Ind. Inform. 2014, 10, 1806–1816. [Google Scholar] [CrossRef]
- Pham, T.L.; Kim, D.S. Efficient Forwarding Protocol for Dual-Hop Relaying Wireless Networks. Wirel. Pers. Commun. 2016, 89, 165–180. [Google Scholar] [CrossRef]
- Baccour, N.; Koubâa, A.; Youssef, H.; Jamâa, M.B.; do Rosário, D.; Alves, M.; Becker, L.B. F-LQE: A Fuzzy Link Quality Estimator for Wireless Sensor Networks. In Proceedings of the 8th European Conference on Wireless Sensor Networks, Coimbra, Portugal, 17–19 February 2010; Marrón, P.J., Whitehouse, K., Eds.; Springer: Berlin, Germany, 2010; pp. 240–255. [Google Scholar]
- Laurindo, S.; Nassiffe, R.; Moraes, R.; Montez, C.; Araujo, G.; Valle, O. Smart: Adequate Selection of Relay Nodes to Support Cooperative Communication in WSNs. In Proceedings of the 13th IEEE International Workshop on Factory Communication Systems (WFCS), Trondheim, Noruega, 31 May–2 June 2017; pp. 1–8. [Google Scholar]
- OMNeT++. Available online: https://omnetpp.org/ (accessed on 5 April 2018).
- Etezadi, F.; Zarifi, K.; Ghrayeb, A.; Affes, S. Decentralized Relay Selection Schemes in Uniformly Distributed Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2012, 11, 938–951. [Google Scholar] [CrossRef]
- Willig, A.; Uhlemann, E. On relaying for wireless industrial communications: Is careful placement of relayers strictly necessary? In Proceedings of the 9th IEEE International Workshop on Factory Communication Systems (WFCS), Lemgo, Germany, 21–24 May 2012; pp. 191–200. [Google Scholar]
- Selvaraj, M.D.; Mallik, R.K. Performance analysis of a multi-relay cooperative diversity network with decode and forward relaying. In Proceedings of the 16th National Conference on Communications (NCC) 2010, Chennai, India, 29–31 January 2010. [Google Scholar] [CrossRef]
- Rajanna, B.; Chandrashrkar, P.; Kishan Rao, K. Optimized power allocation and cooperative relay selection in communication system. J. Adv. Res. Dyn. Control Syst. 2017, 9, 14–18. [Google Scholar]
- Tuan, N.T.; Kim, D.S.; Lee, J.M. On the Performance of Cooperative Transmission Schemes in Industrial Wireless Sensor Networks. IEEE Trans. Ind. Inform. 2018, 14, 4007–4018. [Google Scholar] [CrossRef]
- Liu, L.; Hua, C.; Chen, C.; Guan, X. Relay Selection for Three-Stage Relaying Scheme in Clustered Wireless Networks. IEEE Trans. Veh. Technol. 2015, 64, 2398–2408. [Google Scholar] [CrossRef]
- Andre, T.; Marchenko, N.; Masood, W.; Bettstetter, C. Measurement-Based Analysis of Adaptive Relay Selection in Industrial Wireless Sensor Networks. In Proceedings of the 11th International Symposium on Modeling & Optimization in Mobile, Ad Hoc & Wireless Networks (WiOpt), Tsukuba Science City, Japan, 13–17 May 2013; pp. 113–118. [Google Scholar]
- Brante, G.; Peron, G.D.S.; Souza, R.D.; Abrão, T. Distributed Fuzzy Logic-Based Relay Selection Algorithm for Cooperative. Sensors 2013, 13, 4375–4386. [Google Scholar] [CrossRef]
- Ahmed, M.H.U.; Razzaque, M.A.; Hong, C.S. DEC-MAC: Delay- and energy-aware cooperative medium access control protocol for wireless sensor networks. Ann. Telecommun. 2013, 68, 485–501. [Google Scholar] [CrossRef]
- Cheikh, M.E.; Simpson, O.; Sun, Y. Energy Efficient Relay Selection Method for Clustered Wireless Sensor Network. In Proceedings of the 23th European Wireless Conference on European Wireless 2017, Dresden, Germany, 17–19 May 2017; Volume 2017, pp. 92–97. [Google Scholar]
- Gokturk, M.S.; Gurbuz, O. Cooperation with multiple relays in wireless sensor networks: Optimal cooperator selection and power assignment. Wirel. Netw. 2014, 20, 209–225. [Google Scholar] [CrossRef]
- Ouyang, F.; Ge, J.; Gong, F.; Hou, J. Random access based blind relay selection in large-scale relay networks. IEEE Commun. Lett. 2015, 19, 255–258. [Google Scholar] [CrossRef]
- Chen, F.; Wang, N.; German, R.; Dressler, F. Performance Evaluation of IEEE 802.15.4 LR-WPAN for Industrial Applications. In Proceedings of the Fifth Annual Conference on Wireless on Demand Network Systems and Services, Garmisch-Partenkirchen, Germany, 23–25 January 2008; pp. 89–96. [Google Scholar]
- Valle, O.T.; Milack, A.V.; Montez, C.; Portugal, P.; Vasques, F. Experimental evaluation of multiple retransmission schemes in IEEE 802.15.4 wireless sensor networks. In Proceedings of the 9th IEEE International Workshop on Factory Communication Systems (WFCS), Lemgo, Germany, 21–24 May 2012; pp. 201–210. [Google Scholar]
- Willig, A.; Matusovsky, Y.; Kind, A. Retransmission scheduling in 802.15. 4e LLDN-a reinforcement learning approach with relayers. In Proceedings of the 26th International Telecommunication Networks and Applications Conference (ITNAC), Dunedin, New Zealand, 7–9 December 2016; pp. 63–69. [Google Scholar]
- Pinto, A.; Montez, C.; Araújo, G.; Vasques, F.; Portugal, P. An approach to implement data fusion techniques in wireless sensor networks using genetic machine learning algorithms. Inf. Fusion 2014, 15, 90–101. [Google Scholar] [CrossRef]
- Su, W.; Sadek, A.K.; Liu, K.J.R. Cooperative communication protocols in wireless networks: Performance analysis and optimum power allocation. Wirel. Pers. Commun. 2008, 44, 181–217. [Google Scholar] [CrossRef]
- Ai, Y.; Cheffena, M. On Multi-Hop Decode-and-Forward Cooperative Relaying for Industrial Wireless Sensor Networks. Sensors 2017, 17, 695. [Google Scholar] [CrossRef] [PubMed]
- Srinivasan, K.; Levis, P. RSSI is Under Appreciated. In Proceedings of the Third Workshop on Embedded Networked Sensors (EmNets), Cambridge, MA, USA, 30–31 May 2006; pp. 239–242. [Google Scholar]
- Xu, K.; Wang, Q.; Hassanein, H.; Takahara, G. Optimal wireless sensor networks (WSNs) deployment: Minimum cost with lifetime constraint. In Proceedings of the IEEE International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob’2005), Montreal, QC, Canada, 22–24 August 2005; Volume 3, pp. 454–461. [Google Scholar]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 3rd ed.; The MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Karp, R. Reducibility among combinatorial problems. In Complexity of Computer Computations; Miller, R., Thatcher, J., Eds.; Plenum Press: New York, NY, USA, 1972; pp. 85–103. [Google Scholar]
- Wolsey, L.A. Integer Programming, 1st ed.; Wiley: New York, NY, USA, 1998. [Google Scholar]
- Framework Castalia. Available online: https://github.com/boulis/Castalia (accessed on 5 April 2018).
- Lp Solve Library. Available online: http://lpsolve.sourceforge.net/ (accessed on 5 April 2018).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State-of-the-Art | Category | Periodic or Adaptive | Exchange of Additional Messages |
|---|---|---|---|
| Liu et al. [26] | Link Quality | P | |
| Marchenko et al. [16] | Link Quality | P/A | √ |
| Li et al. [13] | Link Quality | P | √ |
| Ferdouse and Anpalagan [14] | Link Quality | P | |
| Andre et al. [27] | Link Quality | A | √ |
| Valle et al. [7] | Link Quality | P | |
| Etezadi et al. [21] | Link Quality and Neighborhood | P | √ |
| Alkhayyat, Gazi and Sadkhan [15] | Link Quality and Neighborhood | P | √ |
| Brante et al. [28] | Link Quality and Energy | P | |
| Ahmed, Razzaque and Hong [29] | Link Quality and Energy | P | √ |
| Pham and Kim [17] | Link Quality and Energy | P | √ |
| Cheikh, Simpson and Sun [30] | Link Quality and Energy | P | √ |
| Gokturk and Gurbuz [31] | Link Quality and Data Rate | P | |
| Ouyang et al. [32] | Link Quality and Data Rate | P | √ |
| Willing and Uhlemann [22] | Random Relay Selection | P | |
| Proposed Technique | Multi Parameters | P/A |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Node distribution | Random with coordinator in center | Beacon Order (BO) | 6 |
| Radio | CC2420 | Superframe Order (SO) | 4 |
| MAC layer | IEEE 802.15.4 | 0.5 | |
| Number of superframe slots | 145 (5 are used by the CAP) | 1.5 | |
| Data rate | 250 kbps | 1.0 | |
| Initial energy per nodo | 18,720 J | 1.5 | |
| TxOutputPower | 0 dBm | 4 (for PRS) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laurindo, S.; Moraes, R.; Nassiffe, R.; Montez, C.; Vasques, F. An Optimized Relay Selection Technique to Improve the Communication Reliability in Wireless Sensor Networks. Sensors 2018, 18, 3263. https://doi.org/10.3390/s18103263
Laurindo S, Moraes R, Nassiffe R, Montez C, Vasques F. An Optimized Relay Selection Technique to Improve the Communication Reliability in Wireless Sensor Networks. Sensors. 2018; 18(10):3263. https://doi.org/10.3390/s18103263
Chicago/Turabian StyleLaurindo, Suelen, Ricardo Moraes, Ríad Nassiffe, Carlos Montez, and Francisco Vasques. 2018. "An Optimized Relay Selection Technique to Improve the Communication Reliability in Wireless Sensor Networks" Sensors 18, no. 10: 3263. https://doi.org/10.3390/s18103263
APA StyleLaurindo, S., Moraes, R., Nassiffe, R., Montez, C., & Vasques, F. (2018). An Optimized Relay Selection Technique to Improve the Communication Reliability in Wireless Sensor Networks. Sensors, 18(10), 3263. https://doi.org/10.3390/s18103263