1. Introduction
Massive multiple-input multiple-output (MIMO) system is a powerful technology that can increase both spectral efficiency (SE) and energy efficiency (EE), and it has been actively discussed to be included in the 3rd generation partnership project (3GPP) standard as core technology for 5G systems [
1,
2,
3]. The massive MIMO system uses a large amount of transmitter (TX) antennas and serves limited number of user equipments (UEs) and/or Internet of things (IoT) devices/sensors, so it is a combination scheme of multi-user (MU) MIMO and beamforming, and its drastic performance gain has already been proven in various literature [
4,
5,
6,
7,
8]. Recently, it has also been proven that massive MIMO is quite effective in supporting many Internet of things (IoT) and/or Industrial Internet of things (IIoT) devices, and thus can be used for a core technology to configure wireless sensor networks [
9,
10,
11,
12,
13,
14,
15]. The calibration of transceiver impairment is very important problem to support distributed IoT devices using massive MIMO [
9,
10], because without getting accurate channel information, it is impossible to support the distributed IoT devices. In [
9], authors proposed very effective channel calibration method to reduce the channel mismatch due to the radio frequency (RF) impairment. In their method, they used power headroom which is reported periodically and/or aperiodically from distributed IoT devices to base station (BS), to deliver the RF impairment information of IoT devices. Based on the RF impairment information which is embedded in power headroom, BS performs precoding with the compensation of channel mismatch. This is very important scheme to support distributed IoT devices using massive MIMO equipped data center. A more general work for transceiver impairment calibration was also proposed in [
10]. In [
10], authors investigated massive MIMO-based distributed detection with general transceiver impairments at both a massive-antenna data center and multiple single-antenna sensors. They first derived closed-form expressions to show the dependence of both the probability of detection and the probability of false alarm on the transceiver impairments, then they showed that hardware impairments create finite ceilings on the detection performance. In addition, they formulated an optimization problem to maximize the probability of detection, while maintaining a constant false alarm probability and a sum sensor reporting power budget. By exploiting the inherent structures in the problem formulation, they developed an iterative algorithm to solve the problem via invoking the alternating direction method of multipliers. In addition with the results, there has been a high interest to equip the sensor fusion center with massive MIMO framework [
11,
12,
13,
14,
15]. In [
11], authors considered a decentralized multi-sensor estimation problem where sensor nodes observe noisy versions of a correlated random source vector. The sensors amplify and forward their observations over a fading coherent multiple access channel to a fusion center. The fusion center is equipped with a massive MIMO and adopts a minimum mean-square error (MMSE) approach for estimating the source. They optimized the transmission power at each sensor node to increase energy efficiency in various scenarios. In [
12,
13], authors studied channel-aware decision fusion over MIMO channels, in the presence of a massive MIMO at the fusion center. They tried to develop linear fusion rules, and presented a wide choice of low-complexity sub-optimal rules which efficiently exploit massive MIMO benefits and are able to achieve near-optimal performance. In [
14], authors considered the uplink detection and estimation of a zero mean Gaussian signal in a wireless sensor network when the fusion center is configured with a massive MIMO. For the detection problem, they studied the Neyman-Pearson (NP) detector and energy detector (ED), and found optimal values for the sensor transmission gains. According to the results, while bounds derived for NP detection shows performance gains for a fusion center with massive MIMO in low sensor transmit power scenarios, the benefit is shown to disappear when the transmit power is high. However, for the ED, having massive MIMO at the fusion center provides a significant advantage even when the sensors have high power. In [
15], authors considered distributed detection in wireless sensor networks with a massive MIMO fusion center. Using the large deviation principle and random matrix theory, they analyzed the asymptotic detection performance of optimal hypothesis testing in terms of error exponents for the false alarm and miss detection probabilities which enable us to predict how difficult it will be to attain a certain level of detection reliability.
Various studies already have shown that massive MIMO is quite effective to support distributed IoT devices. However, one of big obstacles to the realization of massive MIMO systems is reference signal (RS) overhead, which increases as the number of transmitter (TX) antennas and/or user entities (UEs) increases. The RS overhead reduction is a classical issue in research field of wireless communication, and numerous related technologies have been introduced [
16,
17,
18,
19,
20]. In general, for massive MIMO, it is very difficult to apply orthogonal RS to each antenna due to the excessive amount of TX antennas, thus antenna group-based RS overhead reduction scheme is generally applied [
20,
21]. In this kind of scheme, in each antenna group, the same RS is shared. In the case, there is enough correlation among antennas, antenna group can be decided based on beam groups and locations of distributed UEs. If there is not enough correlation in each antenna, several RS superposition schemes can be applied. A blind channel estimation scheme using the specific statistical property of the signal and the channel were introduced in [
22,
23]. A training based super-imposed signal, which locates the RS stream and data stream in the same resources, and can also be applied to super-imposed RS streams, were introduced in [
24,
25]. It is already proven that the antenna group-based RS overhead reduction scheme is quite effective. One of important factors in designing the antenna group-based RS overhead reduction scheme is how many antennas will be grouped in each group. Several techniques that can effectively be applied to antenna group-based RS overhead reduction scheme have been proposed [
20,
21], while little work has been done for the selection criterion of the number of antennas needed in each group, and related system design [
16,
17,
18,
19,
22,
23,
24,
25]. All of the work described above focuses solely on the methodology of how to reduce RS overhead. In real situation, if we assume we have the RS overhead reduction scheme at hand based on any kind of existing methodology, before applying the scheme, it is necessary to decide the target amount of RS overhead reduction in given situations. In addition, it is also necessary to design the systematic operational step and apparatus for real implementation. As far as we know, these have not been actively discussed in the literature yet.
In this paper, we propose a simplified determination scheme of the number of antennas needed in each group for massive MIMO to support wireless sensor networks, and present related system structure for the operation. Basically, our contribution in this paper can be divided into two parts. First, we analyze the performance of RS overhead reduced massive MIMO systems with antenna grouping and related channel estimation error. Even though antenna grouping-based RS overhead reduction scheme is quite effective for the operation of massive MIMO and related IoT device support, channel estimation error is inevitable. The closed-form approximations of achievable SE, which includes related channel estimation error factor, are derived. Based on the channel estimation error factor, both RS overhead performance and the seriousness of channel estimation error can be adjusted. The seriousness of channel estimation error which is used in this paper will be shown in
Section 5. We also show that the derived closed-form approximations are quite simple and effective, and in good agreement with the simulation results. Second, based on the derived closed-form approximation of SE, and using the exact inverse of the SE closed-form approximation, we propose a simplified determination scheme of the number of antennas needed in each group. Without this scheme, it is very difficult to apply antenna grouping-based RS overhead reduction scheme in a real system. The change of parameters must be reflected in real time to effectively determine the number of antennas in each group. The presented system block diagram and flow chart can be greatly helpful to real implementation of the proposed scheme. In a word, based on closed-form approximation of SE, to support distributed IoT devices, we propose a simplified determination scheme of the number of antennas needed in each group. More specifically, our main contributions are summarized as follows:
We present the closed-form approximations of achievable SE with channel estimation error for two representative linear precodings. We used the error factor which reflects the degree of channel estimation error and the error matrix which has the same statistical characteristic but independent of the channel matrix. The range of error factor is between 0 and 1, and it is a function of the number of antennas in each antenna group, and the adjustable factor which reflects the seriousness of the channel estimation error depending on the applied reference signal (RS) overhead reduction technique. We prove the derived SEs are quite simple and effective using extensive simulation results.
Based on the closed-form approximations of achievable SEs, we derive the determination criteria of the number of antennas needed in each antenna group. The determination criteria are derived from the inverse functions of achievable SEs.
We provide the system block diagram and algorithmic steps to apply the proposed determination scheme. The system block diagram is consisted of 5 main blocks, The central management unit, operation parameters unit, minimum data rate unit, decision unit, and UE. There are 3 thresholds we should consider for the systematic operation, i.e., power consumption, data rate, and the number of iterations.
We provide the extensive simulation results of the proposed scheme with various parameters, and show that the derived approximations are very effective and well-matched with the simulation results.
The paper is organised as follows: the system description is presented in
Section 2. Massive MIMO model, related precoding techniques, and RS overhead model are given in
Section 2. In
Section 3, the performance analysis and closed-forms approximation of achievable SE are presented. In
Section 4, the determination scheme of the number of antennas in each group is shown. In
Section 5, the proposed model is numerically analyzed. With monte-carlo (MC) simulations, we show that the analysis is well-matched with simulation results. Finally, concluding remarks are given in
Section 6.
Notation: In the rest of the paper, boldface lower-case and upper-case characters denote vectors and matrices, respectively. The operators and denote conjugate transpose and expectation, respectively. The identity matrix is denoted , and the zero matrix is denoted . is the complex Gaussian distributed vector with mean zero and covariance . denotes the common logarithm and represents the Frobenius norm operator. We use ∘ to denote the componentwise product of the matrices. we use for diagonal matrix with as the ith diagonal element.
3. Closed-Form Approximation of Achievable Spectral Efficiency with Channel Estimation Error
In this Section, we present the closed-form approximation of achievable SE with channel estimation error. We should keep in mind that antenna grouping-based RS overhead reduction scheme causes channel estimation error. As
increases, channel estimation error increases. The estimated channel,
, is modeled as follows:
where
is the error factor, which reflects the degree of channel estimation error, and
is the error matrix with the same statistical characteristic but independent of the channel,
.
can also be modeled as follows:
where
is the channel estimation error regardless of antenna group, and
is the adjustable factor to reflect the seriousness of the channel estimation error depending on the applied technique.
For the performance analysis, the maximum achievable SE can be derived by using i.i.d. Rayleigh channel with zero mean and unit variance. From (
1), and (
7), the symbol received by
k-th user is given by
where
and
are the
channel vectors for
k-th user, and
is the
precoding vector for
k-th UE. The last term of (
13) is the IUI.
is a normalized factor for the precoding process of
k-th UE, and it is approximated as
for MF precoding and
for ZF precoding [
35] as we mentioned in the previous section. Assuming all the path loss component to UE
k is the same, which is true in a real system, the effective SINR at the receiver (RX) for user
k,
, can be expressed as follows:
where
is the received signal-to-noise ratio at RX,
is the large scale fading or path loss component between TX and
kth UE, and
is the noise power in the given bandwidth,
B. As was shown in the previous section, path loss components from 1st, 2nd, 3rd, ⋯,
th antenna in BS to antenna in
kth UE are the same (
). This is because the distances among antennas in BS are much shorter than the distances between antennas in BS and antennas in UEs.
The data rate,
R of single isolated cell can be represented as follows:
where
is the scaling factor for RS overhead [
4], and
is the expectation operation. In the ideal case, i.e., perfect blind channel estimation with no channel estimation error,
is equal to 1. In a real situation, however, by using (
10), we can say that
, when a RS overhead reduction scheme is applied. Since the scaling factor should be more than 0.5 in the system design perspective, the spectral efficiency (SE) based on capacity analysis can be represented as follows:
where
and
represent corresponding constant when overhead is
.
We show the reference SINR based on MF precoding. By using channel hardening effect of the massive MIMO systems [
4], the reference SINR based on MF precoding,
, can be simplified as follows [
38]:
where
is the IUI term after MF precoding. For massive MIMO region,
can be simplified to
[
4]. Here we can say that
is the channel gain of the massive MIMO system.
It is obvious that if we increase the number of TX antennas or reduce the number of UEs, we can get a more effective SINR. However, it should be noted that MF precoding does not completely remove the IUI in practical number of TX antennas. It is known that ZF precoding can completely remove IUI with the perfect channel information, but channel gain is reduced to as compared with MF precoding, .
When there is a channel estimation error, the effective SINR based on MF precoding can be represented as follows:
where
is the
estimated channel vector for
k-th UE. Using (
11) and statistical approximation, (
18) can be simplified as follows:
where
is the
channel estimation error vector. For Equation (
19), we use the following approximations:
The approximation of (
20) and (
21) comes from the following equations:
By comparing (
17) and (
19), it can be seen that the SINR based on MF precoding with channel estimation error has the same characteristics, but the signal power is scaled down by the square of the error factor,
.
Using (
11) and statistical approximation, The effective SINR based on ZF precoding with channel estimation error can be written as follows [
39]:
where
.
For (
24), the following approximations are used:
From (
17) and (
24), we can see that the SINR based on ZF precoding with channel estimation error is scaled down by
and
for the signal and the interference power from reference SINR based on MF precoding, respectively. Obviously, the residual IUI term for ZF precoding is due to channel estimation error.
The SINRs for the cases of reference MF precoding, reference ZF precoding, MF precoding with channel estimation error, and ZF precoding with channel estimation error are summarized in
Table 2.
If we put the SINR in the
Table 2 into the Equation (
16), we can get the theoretical achievable SE of RS overhead reduction scheme with channel estimation error. In a real situation, the channel estimation error due to any kind of interference can be reflected in error factor
. The RS overhead reduction performance can be also reflected in RS overhead reduction factor and/or the number of antenna in each group,
.
increment guarantees
increment. However, increasing
is not always beneficial. As we can see from Equation (
12),
increment also causes
increment. Obviously,
increment can cause performance reduction.
In the case of RZF precoding, the SINR is shown in Equation (
19) of [
39] and Equation (
17) of [
40]. Substituting the SINR of RZF,
into Equation (
16), one can obtain the achievable SE of RZF precoding. Since the expressions in [
39,
40] are too complex to use in real system analysis, we show the simplified expression using the SINRs of MF and ZF precoding. Basically in low power regime, the SINR of RZF precoding is similar to MF precoding. In high power regime, the SINR of RZF is similar to ZF precoding. Based on these facts, we can approximate the SINR of RZF with channel estimation error as follows:
Since we assume the system with
, due to the distinct channel gain, the SINR of RZF precoding is similar to the SINR of ZF precoding. We will show this in
Section 5. Readers can refer to [
39,
40] for more details of RZF precoding.
4. Determination and Related System Structure
In this Section, we propose how to determine
in an antenna group-based RS overhead reduced massive MIMO. Based on analysis in
Section 3, ZF and MF precoded SE,
and
can be approximated as follows:
where
,
, and
are corresponding
K,
, and
when
.
A few observations are in order.
- Observation 1:
As increases, bandwidth increases due to RS overhead reduction.
- Observation 2:
As increases, SINR decreases due to channel estimation error.
Increasing is beneficial to the system when system is working in bandwidth limited regime, but if system is working in power limited regime and/or interference limited regime, increasing worsens system performance.
Two strategies can be considered to choose
. First,
can be determined to maximize SE which can be represented as follows for ZF precoding and MF precoding respectively.
where
and
is the maximum SNR which reflect the maximum allowable TX power. This is a typical setting for wireless communication systems up to now. However, to support distributed sensors and/or sensor networks, energy efficiency can be more important than SE depending on applications. In a certain application, sensor devices do not require high data rate, but maintaining moderate data rate can be enough. In this situation,
can be determined based on the minimum required SE in a given circumstances. In particular, for the energy efficient sensor networks, if the minimum required SE is satisfied, the system can operates efficiently with high energy efficiency and a moderate data rate. Also, if determination of
causes lower SE than the requirement, it could be problematic to the proper operation of sensor networks. It is particularly important to maintain the required data rate for industrial IoT and/or sensor networks. If
can be derived as a closed-form equation, it can be very useful to reduce the computational complexity and delay of the system. The inverses of Equations (
28) and(
29) can provide
with given required SE, however the exact closed-form inverse equations of Equations (
28) and(
29) are impossible, because
terms exist both inside and outside of log term. Instead, by keeping the
as
, the minimum value of data portion, we can get
with satisfying the minimum required value of SE. The proposed scheme is can be established based on following Proposition.
Proposition 1. iff and .
Proof. Since
, if
, then
thus Proposition 1 is satisfied. ☐
From Proposition 1, the maximum value of is 0.5. This means, if we fix and derive the , the minimum required SE can be satisfied. Proposition 1 also can be applied to the MF precoding case.
Corollary 1. iff and .
Proof. Proof of Corollary 1 can follow the same way of that of Proposition 1. ☐
Let
, then the closed-form equation for
for ZF precoding and MF precoding with the minimum required
can be represented as follows:
where
and
are required minimum SE for ZF and MF precoded systems. By fixing
, the lowest bound, we can get
that satisfy to
and
with some margin.
The proposed scheme can be used in various ways. In particular, it would be very effective to reduce the power consumption of massive MIMO-based wireless sensor networks.
Figure 3 shows example of a system block diagram for the proposed scheme. It consists of several system blocks.
First, the central management unit can decide the power consumption and/or power efficiency of the system. Then, BS measures current power efficiency. BS also has various operation parameters, such as , K, B, and and so on. Based on the power efficiency and operation parameters, the minimum data rate that must be satisfied for the system can be derived. If the system is designed for for Industrial internet, there would be a threshold for data rate, and the system should set the minimum data rate higher than the threshold. Then, from the minimum data rate and other parameters that are necessary, can be determined. The BS can receive feedback from UEs to check if they need a higher data rate depending on the situation. Wireless channel is not stable, so there could be several situations that can arise. Then, the procedures we mentioned can be repeated for a given number of iterations. There could be an interval for the determination of . If the interval is small, then the performance would be better, but complexity could be a problem or vice versa.
Example of operation flow chart is presented in
Figure 4. First, BS can get system parameters, then it gets required power efficiency. Based on system parameters and power efficiency, the required minimum data rate can be derived. The
can be derived using the proposed closed-form equation. The RS can be designed and used based on
. Then, communications between massive MIMO and distributed IoT devices would be conducted. If power consumption is higher than the threshold, we can reduce power consumption by any kind of parameter adjustment. Typically, TX power consumes a lot of power, thus it can be reduced to increase power efficiency. However, TX power reduction accompanies data rate reduction. If the data rate is higher than threshold even though TX power is reduced, then system is in good shape and the procedure can be finished, but if data rate is lower than the threshold due to the TX power reduction, then in a given number of iterations, we should reduce required minimum data rate to satisfy power efficiency. The determination of thresholds for the number of iterations, power consumptions, data rate are the system designer’s choice. For the better understand and implementation, we provide the detailed algorithm as pseudo-code type in Algorithm 1.
The required number of iterations for the system can be changed based on system parameters. There are several parameters including the threshold for the number of iterations, thus system designer can decide it between performance and delay/complexity trade-off.
| Algorithm 1: Operation of proposed scheme |
 |
5. Numerical Results and Discussion
In this Section, we verify the proposed scheme using monte-carlo (MC) simulations with
iterations, and present the related discussions. The simulation parameter for this section is shown in
Table 3.
We used
to meet the minimum requirement of channel hardening effect. The noise power
is normalized to unity with
80 W and
20 MHz bandwidth. Assuming we use a macro-cell type setup with 2GHz carrier frequency, the path loss in dB is modeled as 128.1 + 37.6 log(
d) with distance
d in kilometers [
41]. Then, the setup is equivalent to average user distance of
km. We set
and
in Equation (
12). Obviously, the parameter can be changed depending on the applied technique and circumstances.
Before showing the numerical results, we present the seriousness of channel estimation error in
Figure 5.
We show the seriousness of channel estimation error using normalized mean square error (NMSE) which is defined as:
is the estimated channel and it is a function of
as we shown in the previous section. NMSE is linearly increased as
increases. When
is 40,
has reached around
, while we can get bandwidth benefit thanks to the RS overhead reduction.
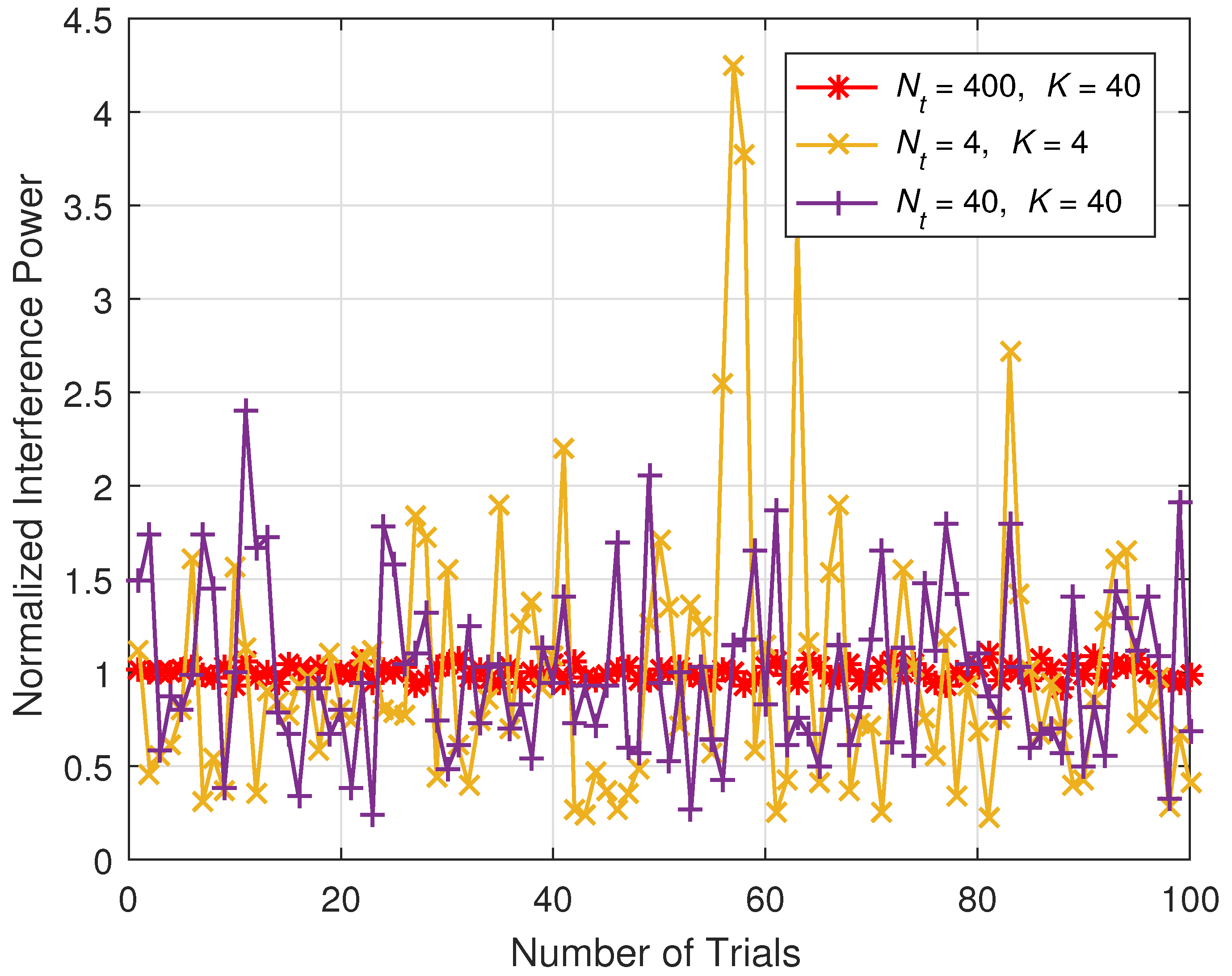
Figure 6 shows the numerical results of SE versus
. Red ‘*’s and black ‘x’ indicate the simulation results, and lines are plotted based on theoretical analysis. Our theoretical analysis is well-matched with the simulation result. When
is small which is less than 4, due to the excessive RS overhead which reaches the maximum allowable RS overhead, SE is not increased, even though
is increased. However, when
is larger than 8, the SE increases, as
increases up to 1000. RS overhead reduction technique is definitely necessary to increase
and SE, and fully enjoy the benefit of massive MIMO. However, increasing
causes channel estimation error as we have seen from previous Section. Increasing
gives a bandwidth advantage by giving more room for data, but due to channel estimation error, SINR becomes worse.
To show the relationship between SE and
, we present
Figure 7, SE versus
. As observed, if
is larger than 16, the SE is reduced due to worsened SINR. It is noticeable in ZF precoding because as
grows, IUI terms grows. The IUI term in ZF precoding is almost negligible when there is little channel estimation error. In the case of MF precoding, there is no SE reduction, but SE is fixed to a certain point even though
increases. This is because IUI is already a dominant term in MF precoding even when there is little channel estimation error. When we use MF precoding, if
is larger than 16, the system is already working in a power limited regime, thus increasing
gives little help in increasing SE. This phenomenon is maintained even if we increase
.
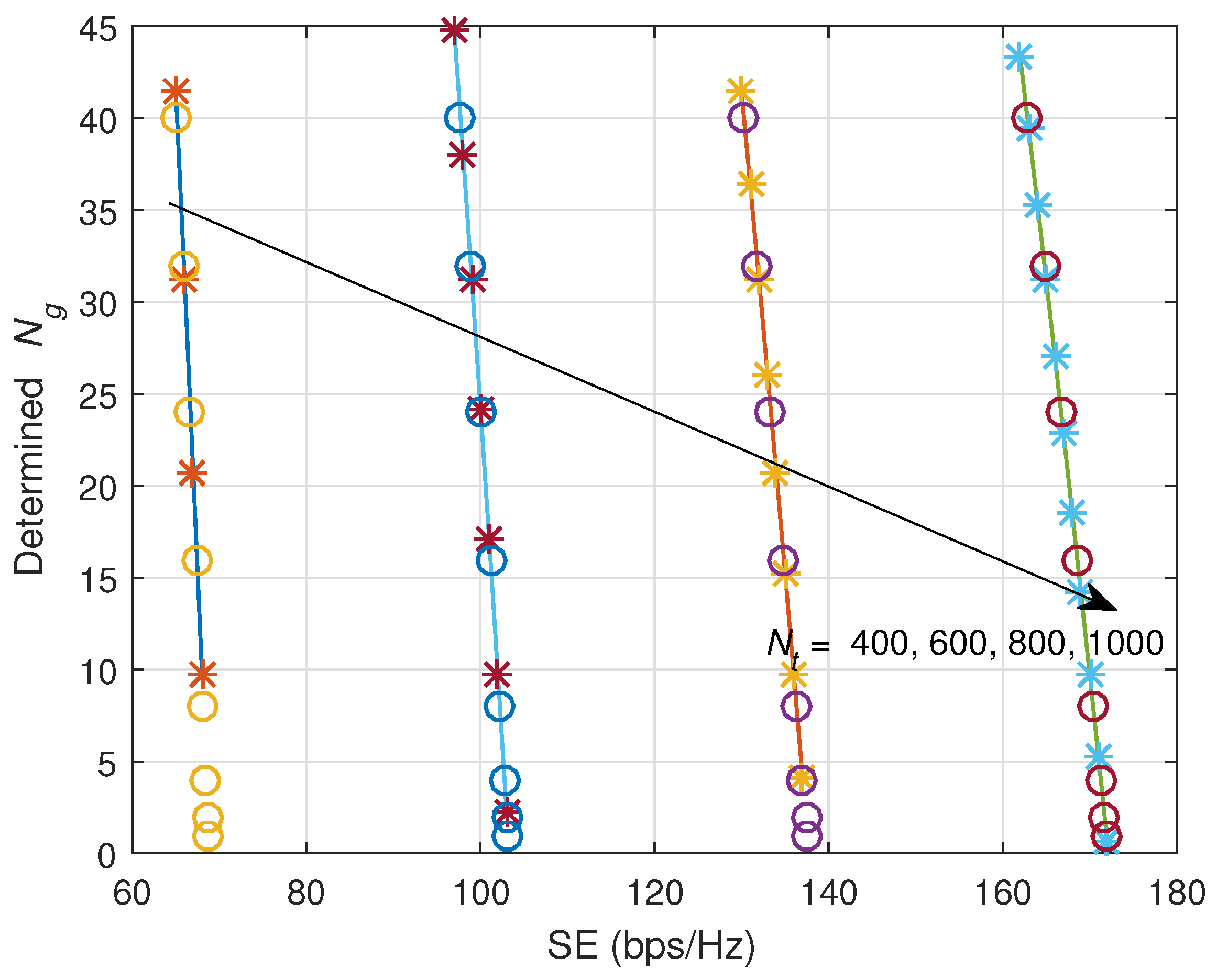
Now, we show the effectiveness of the closed-form equation for
determination.
Figure 8 and
Figure 9 show the determined
versus SE. ‘*’ marks indicate results of closed-form SE equation, and ‘x’ marks indicate results of MC simulations. Lines are plotted based on theoretical derivations. As observed, all 3 kinds of results are well-matched, and the derived closed-form equations for
can be used with high accuracy. In the case of ZF precoding, the lower bound of SE is sensitive to the variation of
, while in the case of MF precoding, the lower bound of SE is not so sensitive to the variation of
.
Maintaining SE lower bounds is quite important to the energy efficient sensor network. The important metric of wireless sensor network is moving from SE to energy efficiency. However, keeping a stable SE lower bound is also very important for some kinds of sensor network, such as Industrial internet network. The proposed scheme provides the logic of keeping high energy efficiency maintaining SE lower bound, thus it can be a core technology for the massive MIMO-based energy efficient sensor network.
As we mentioned in the previous section, for the case of RZF precoding, we can use the case of ZF precoding.
Figure 10 presents the SE comparison of ZF precoding and RZF precoding. We use
which is the downlink RX inverse SNR matrix [
28,
30,
40]. As observed, the SE of RZF precoding also exactly matches with the analytical SE of ZF precoding. Thus, all the analysis for ZF precoding in this paper is also applicable to RZF.
To completely validate the proposed system, it is important to perform real measurement. Since we show the feasibility of the proposed system in this paper, the real measurement for the system can be performed in future work.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}