A Support Vector Learning-Based Particle Filter Scheme for Target Localization in Communication-Constrained Underwater Acoustic Sensor Networks


Abstract
:1. Introduction
- A node-selection strategy, where the discrimination criteria is the distance to target so as to realize the short-distance communication, is proposed to select fractional number of sensor nodes from the sensor networks. The pattern where less sensor nodes participate in the sensing process by the way of short-distance communication enhances the communication property and reduces the sensing noises.
- A learning-based observation model coupled with an iterative regression function is proposed to yield an accurate observation against the sensing noise.
- A likelihood function integrating the accurate observation is formulated to effectively update the weights of particles, avoiding the “particle degeneracy”. The solution yields an accurate localization result.
2. Problem Formulation
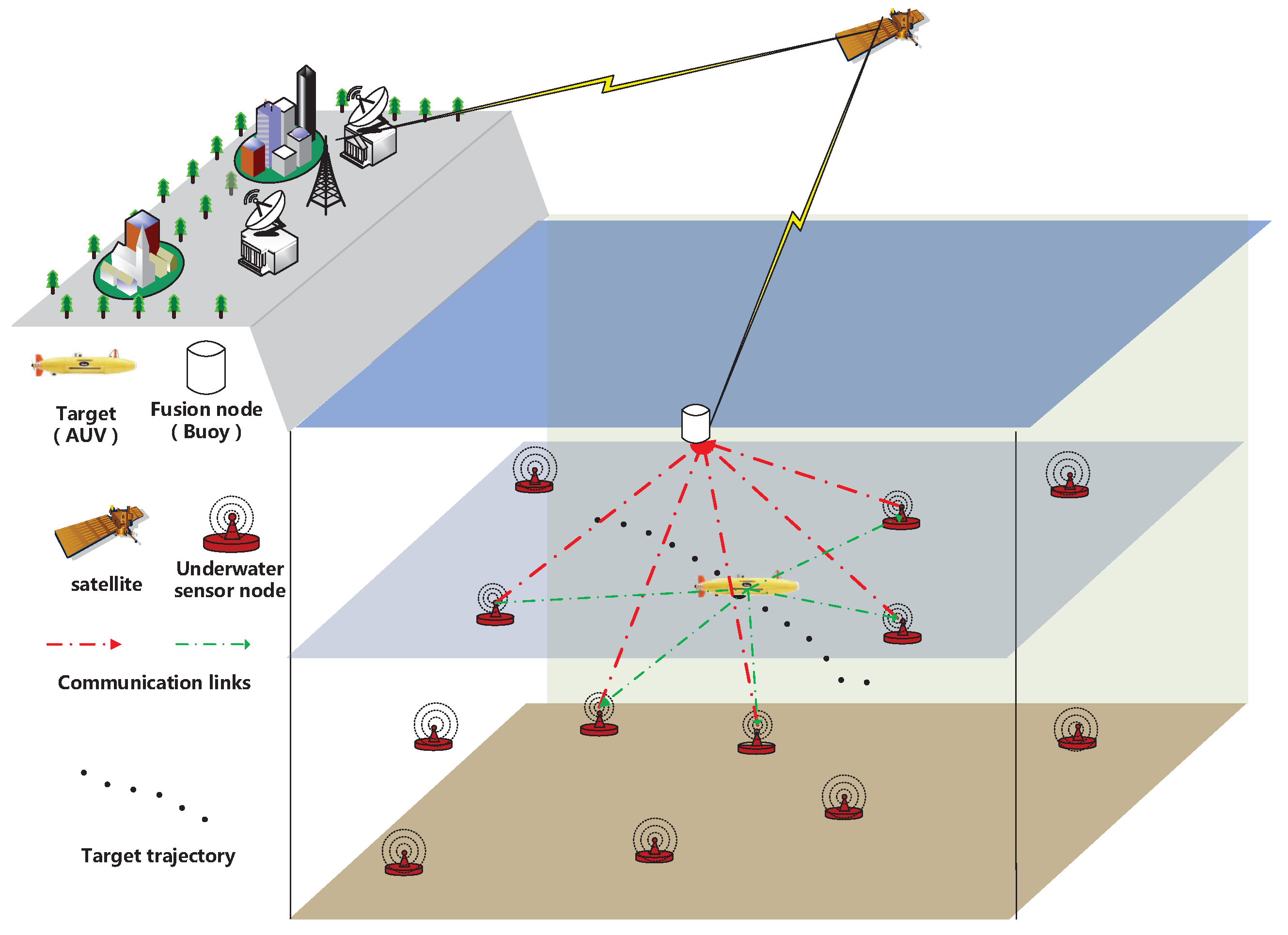
2.1. System Model
2.2. The Problems of the Particle Filter Localization Scheme in UASNs
3. Algorithm Description
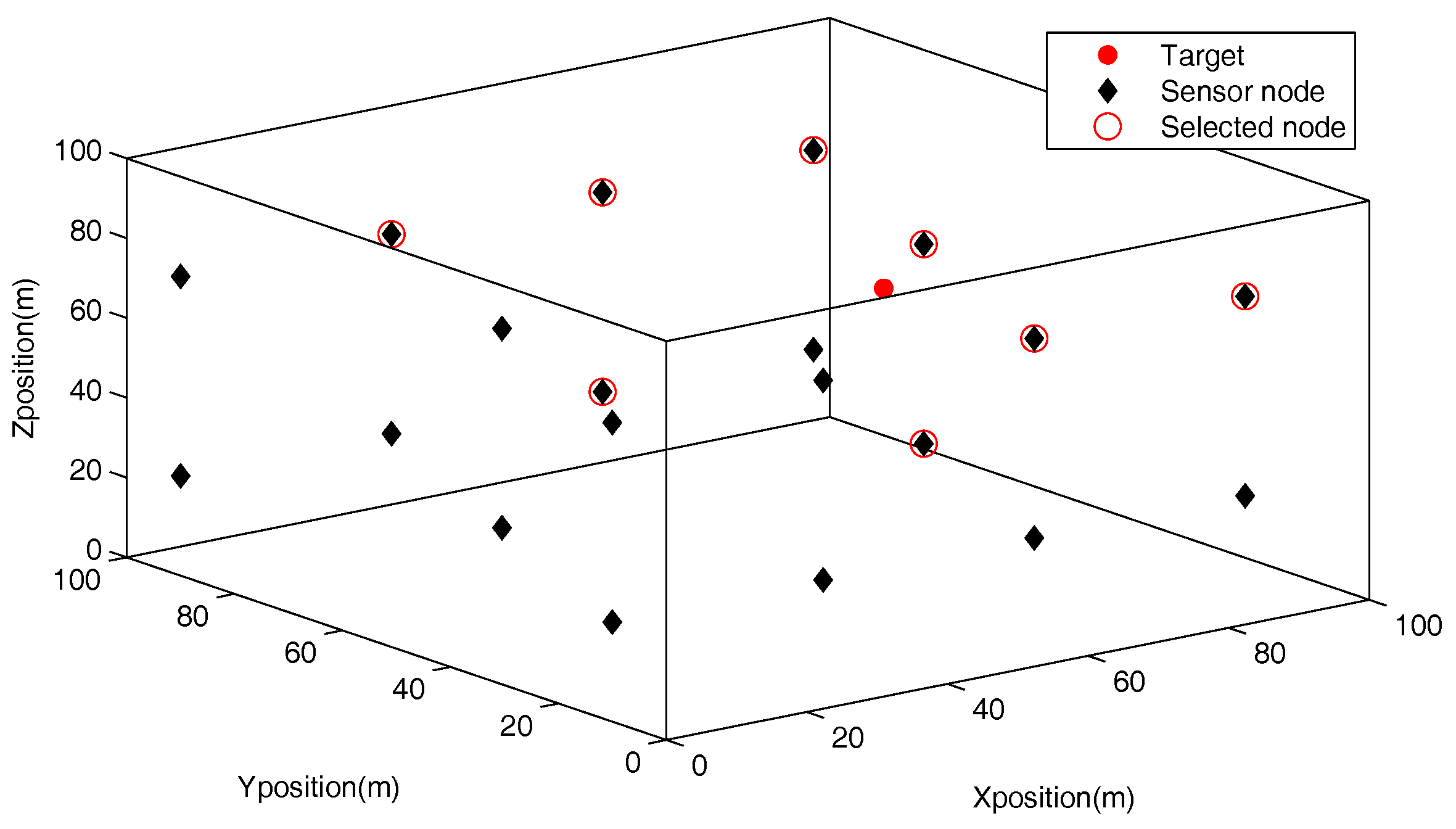
3.1. Node-Selection Strategy for UASNs
3.2. Support Vector Learning-Based Particle Filter Method
3.2.1. Least-Square Support Vector Regression (LSSVR)-based Observation Function
| Algorithm 1 LSSVR-based observation function |
|
3.2.2. Formulation Likelihood Function
| Algorithm 2 Support vector learning-based particle filter algorithm |
|
4. Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| UASNs | underwater acoustic sensor networks |
| SVM | support vector machine |
| LSSVR | least square support vector regression |
| ToA | time of arrival |
| AUV | Autonomous Underwater Vehicle |
| SVL-PF | support vector learning-based particle filter |
| LSSVR-PF | least-square support vector regression-based particle filter |
| ToA-PF | ToA-based particle filter |
References
- Han, G.; Jiang, J.; Sun, N.; Shu, L. Secure communication for underwater acoustic sensor networks. IEEE Commun. Mag. 2015, 53, 54–60. [Google Scholar] [CrossRef]
- Han, G.; Qian, A.; Zhang, C.; Wang, Y.; Rodrigues, J.J. Localization algorithms in large-scale underwater acoustic sensor networks: A quantitative comparison. Int. J. Distrib. Sens. Netw. 2014, 10, 379–382. [Google Scholar] [CrossRef]
- Murad, M.; Sheikh, A.A.; Manzoor, M.A.; Felemban, E.; Qaisar, S. A survey on current underwater acoustic sensor network applications. Int. J. Comput. Theory Eng. 2015, 7, 51–56. [Google Scholar] [CrossRef]
- Tuna, G.; Gungor, V.C. A survey on deployment techniques, localization algorithms, and research challenges for underwater acoustic sensor networks. Int. J. Commun. Syst. 2017, 30. [Google Scholar] [CrossRef]
- Cheng, X.; Shu, H.; Liang, Q.; Du, D.H.C. Silent positioning in underwater acoustic sensor networks. IEEE Trans. Veh. Technol. 2008, 57, 1756–1766. [Google Scholar] [CrossRef]
- Bayat, M.; Crasta, N.; Aguiar, A.P.; Pascoal, A.M. Range-based underwater vehicle localization in the presence of unknown ocean currents: Theory and experiments. IEEE Trans. Control Syst. Tech. 2016, 24, 122–139. [Google Scholar] [CrossRef]
- Isbitiren, G.; Akan, O.B. Three-dimensional underwater target tracking with acoustic sensor networks. IEEE Trans. Veh. Technol. 2011, 60, 3897–3906. [Google Scholar] [CrossRef]
- Carroll, P.; Zhou, S.; Mahmood, K.; Zhou, H.; Xu, X.; Cui, J.H. On-demand asynchronous localization for underwater sensor networks. In Oceans; IEEE: Piscataway, NJ, USA, 2012; pp. 1–4. [Google Scholar]
- Yang, K.W.; Guo, Y.B.; Wei, D.W.; Jin, Y.G. MFALM: An Active Localization Method for Dynamic Underwater Wireless Sensor Networks. Comput. Sci. 2010, 37, 114–117. [Google Scholar]
- Li, Y.; Chakravarty, S.; Sun, S.; Tan, Z.; Sheng, L.; Yang, M.; Wu, X. A passive detection and tracking divers method based on energy detection and EKF algorithm. Cluster Comput. 2017. [Google Scholar] [CrossRef]
- Nguyen, Q.V.; Colas, F.; Vincent, E.; Charpillet, F. Long-term robot motion planning for active sound source localization with Monte Carlo tree search. In Proceedings of the Hands-free Speech Communications and Microphone Arrays (HSCMA), San Francisco, CA, USA, 1–3 March 2017; pp. 61–65. [Google Scholar]
- Yan, J.; Zhang, X.; Luo, X.; Wang, Y.; Chen, C.; Guan, X. Asynchronous Localization with Mobility Prediction for Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- Luo, H.; Guo, Z.; Dong, W.; Hong, F.; Zhao, Y. LDB: Localization with directional beacons for sparse 3D underwater acoustic sensor networks. JNW 2010, 5, 28–38. [Google Scholar] [CrossRef]
- Yan, J.; Xu, Z.; Wan, Y.; Chen, C.; Luo, X. Consensus estimation-based target localization in underwater acoustic sensor networks. Int. J. Robust Nonlinear Control. 2017, 27, 1607–1627. [Google Scholar] [CrossRef]
- Kim, W.; Stanković, M.S.; Johansson, K.H.; Kim, H.J. A distributed support vector machine learning over wireless sensor networks. IEEE Trans. Cybern. 2015, 45, 2599–2611. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Xu, M.; Wang, H.; Wu, Y.; Shi, H. Combination of interacting multiple models with the particle filter for three-dimensional target tracking in underwater wireless sensor networks. Math. Probl. Eng. 2012, 2012. [Google Scholar] [CrossRef]
- Braca, P.; Willett, P.; LePage, K.D.; Marano, S.; Matta, V. Bayesian tracking in underwater wireless sensor networks with port-starboard ambiguity. IEEE Trans. Signal Process. 2014, 62, 1864–1878. [Google Scholar] [CrossRef]
- Song, B.; Zhang, S.; Long, J.; Hu, Q. Fingerprinting localization method based on toa and particle filtering for mines. Math. Probl. Eng. 2017, 2017, 1–10. [Google Scholar] [CrossRef]
- Luo, J.; Fan, L. A Two-Phase Time Synchronization-Free Localization Algorithm for Underwater Sensor Networks. Sensors 2017, 17, 726. [Google Scholar] [CrossRef] [PubMed]
- Han, Y.; Fei, Y. TARS: A traffic-adaptive receiver-synchronized MAC protocol for underwater sensor networks. ACM Trans. Sensor Netw. 2017, 13, 27. [Google Scholar] [CrossRef]
- Kebkal, K.G.; Kebkal, V.K.; Kebkal, O.G.; Petroccia, R. Underwater acoustic modems (s2cr series) for synchronization of underwater acoustic network clocks during payload data exchange. IEEE J. Ocean. Eng. 2016, 41, 428–439. [Google Scholar]
- Wang, P.; Zhang, L.; Li, V.O. Ray-Model-Based Routing for Underwater Acoustic Sensor Networks Accounting for Anisotropic Sound Propagation. IEICE Trans. Commun. 2013, 96, 2060–2068. [Google Scholar] [CrossRef]
- Qi, Y.J.; Wang, Y.J. Robust object tracking algorithm by particle filter based on human memory model. Pattern Recognit. Artif. Intell. 2012, 25, 810–816. [Google Scholar]
- Li, W.H.; Zhou, Q.; Wang, Y.; Zhang, D.C. Adaptive tracking algorithm based on particle filter-mean shift. J. Jilin Univ. 2012, 42, 407–411. [Google Scholar]
- Xu, K.; Guo, L. An anti-occlusion object tracking algorithm based on mean shift and particle filter. ICIC Express Lett. Part B 2011, 2, 95–100. [Google Scholar]
- Xiongzi, C.; Jinsong, Y.; Diyin, T.; Yingxun, W. A novel pf-lssvr-based framework for failure prognosis of nonlinear systems with time-varying parameters. Chin. J. Aeronaut. 2012, 25, 715–724. [Google Scholar]
- Chen, X.; Song, S.; Xing, J. A ToA/IMU indoor positioning system by extended Kalman filter, particle filter and MAP algorithms. In Proceedings of the 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016; pp. 1–7. [Google Scholar]
- Pak, J.M.; Ahn, C.K.; Shi, P.; Shmaliy, Y.S.; Lim, M.T. Distributed hybrid particle/FIR filtering for mitigating NLOS effects in TOA-based localization using wireless sensor networks. IEEE Trans. Ind. Electron. 2017, 64, 5182–5191. [Google Scholar] [CrossRef]
- Zhong, X.; Mohammadi, A.; Premkumar, A.B.; Asif, A. A distributed particle filtering approach for multiple acoustic source tracking using an acoustic vector sensor network. Signal Process. 2015, 108, 589–603. [Google Scholar] [CrossRef]
- Zhong, X.; Premkumar, A.; Madhukumar, A. Particle filtering for acoustic source tracking in impulsive noise with alpha-stable process. IEEE Sens. J. 2013, 13, 589–600. [Google Scholar] [CrossRef]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lu, J. A reliability-augmented particle filter for magnetic fingerprinting based indoor localization on smartphone. IEEE Trans. Mob. Comput. 2016, 15, 1877–1892. [Google Scholar] [CrossRef]
- Kim, W.; Park, J.; Kim, H.J. Support vector learning approaches for object localization in acoustic wireless sensor networks. In Proceedings of the 2010 5th IEEE International Conference Intelligent Systems (IS), London, UK, 7–9 July 2010; pp. 485–489. [Google Scholar]
- Waite, A. Sonar for Practising Engineers; John Wiley & Sons Incorporated: New York, NY, USA, 2002. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Communication-Efficient Range | 10 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
|---|---|---|---|---|---|---|---|---|
| Number of sensor node within the distance | 0 | 2 | 8 | 14 | 18 | 20 | 20 | 20 |
| Discriminant of sensor nodes | 0 | 2 | 8 | 14 | 18 | 19 | 19 | 19 |
| Time Step (s) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Method | |||||||||||
| SVL-PF in this paper | 2.2723 | 2.3781 | 2.6469 | 2.6243 | 2.5688 | 2.5631 | 2.5405 | 2.5059 | 2.5209 | 2.4971 | |
| Consensus Estimation in [14] | 2.4758 | 2.7938 | 3.3335 | 3.4380 | 3.3274 | 3.3984 | 3.4429 | 3.5236 | 3.6684 | 3.7120 | |
| LSSVR-PF in [26] | 2.4915 | 2.6860 | 3.1510 | 3.1835 | 3.4320 | 3.3845 | 3.3690 | 3.5250 | 3.7554 | 3.8613 | |
| ToA-PF in [28] | 5.3947 | 5.1016 | 4.8245 | 4.4975 | 4.5450 | 4.4157 | 4.3370 | 4.1996 | 4.2199 | 4.2943 | |
| Time Step (s) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Method | |||||||||||
| SVL-PF in this paper | 3.4576 | 3.5440 | 3.5353 | 3.5832 | 3.4888 | 3.4695 | 3.4276 | 3.4292 | 3.4305 | 3.4523 | |
| Consensus Estimation in [14] | 4.1671 | 4.6963 | 5.1126 | 5.9764 | 5.8122 | 5.7013 | 5.6783 | 5.6683 | 5.7145 | 5.9295 | |
| LSSVR-PF in [26] | 5.2951 | 5.5807 | 5.5747 | 6.1289 | 6.1254 | 6.6172 | 7.1446 | 7.5155 | 7.8664 | 8.2197 | |
| ToA-PF in [28] | 4.9028 | 4.6084 | 5.3006 | 5.8910 | 6.1165 | 6.3656 | 6.4334 | 6.4526 | 6.3611 | 6.5046 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Zhang, C.; Yan, L.; Han, S.; Guan, X. A Support Vector Learning-Based Particle Filter Scheme for Target Localization in Communication-Constrained Underwater Acoustic Sensor Networks. Sensors 2018, 18, 8. https://doi.org/10.3390/s18010008
Li X, Zhang C, Yan L, Han S, Guan X. A Support Vector Learning-Based Particle Filter Scheme for Target Localization in Communication-Constrained Underwater Acoustic Sensor Networks. Sensors. 2018; 18(1):8. https://doi.org/10.3390/s18010008
Chicago/Turabian StyleLi, Xinbin, Chenglin Zhang, Lei Yan, Song Han, and Xinping Guan. 2018. "A Support Vector Learning-Based Particle Filter Scheme for Target Localization in Communication-Constrained Underwater Acoustic Sensor Networks" Sensors 18, no. 1: 8. https://doi.org/10.3390/s18010008
APA StyleLi, X., Zhang, C., Yan, L., Han, S., & Guan, X. (2018). A Support Vector Learning-Based Particle Filter Scheme for Target Localization in Communication-Constrained Underwater Acoustic Sensor Networks. Sensors, 18(1), 8. https://doi.org/10.3390/s18010008