Design and Implementation of a Coastal-Mounted Sensor for Oil Film Detection on Seawater




Abstract
1. Introduction
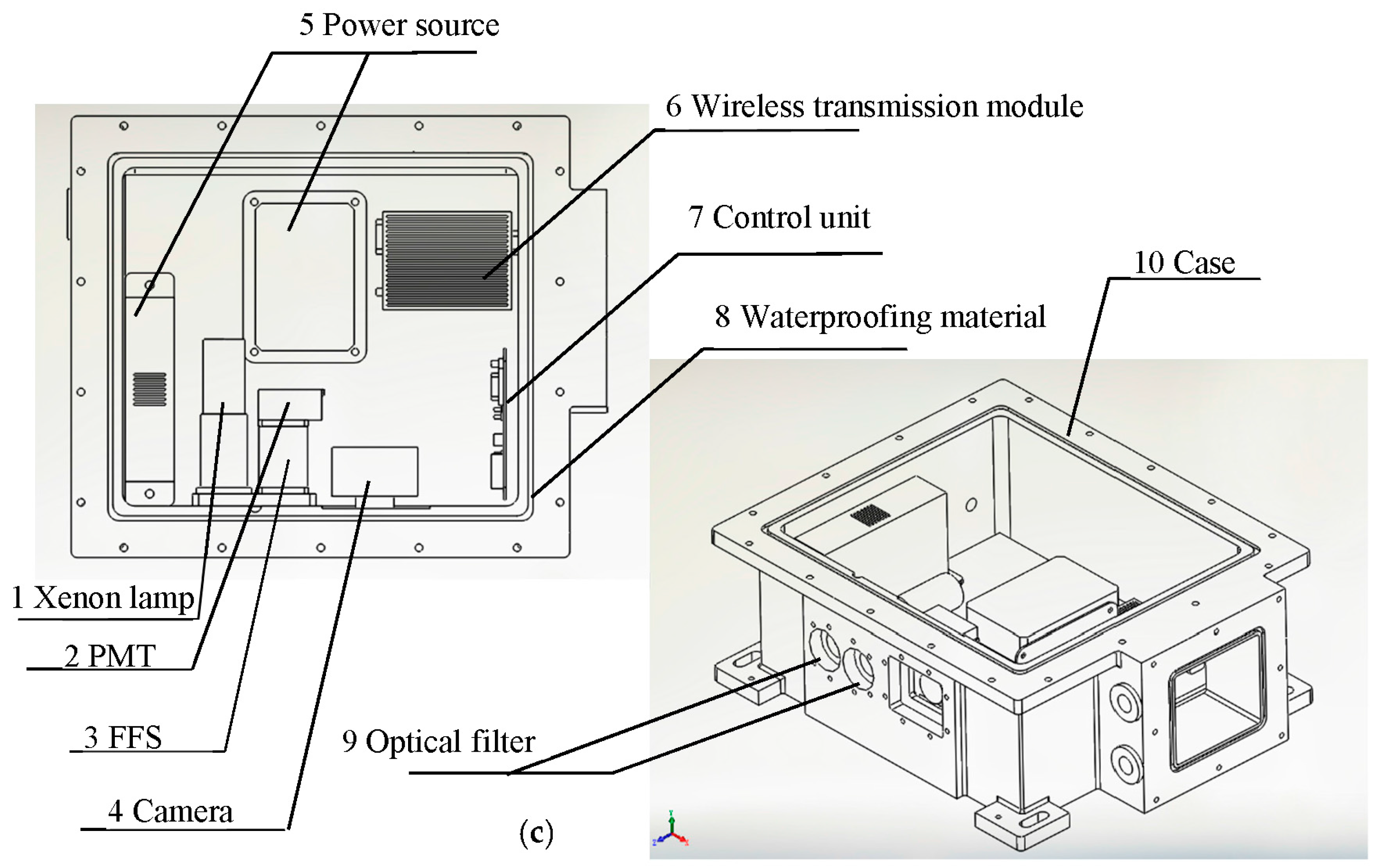
2. Design and Implementation of FFS-Based Coastal-Mounted Sensor
3. Experiments
3.1. Seawater and Oil Samples
3.2. Measurement and Apparatus
4. Results and Discussion
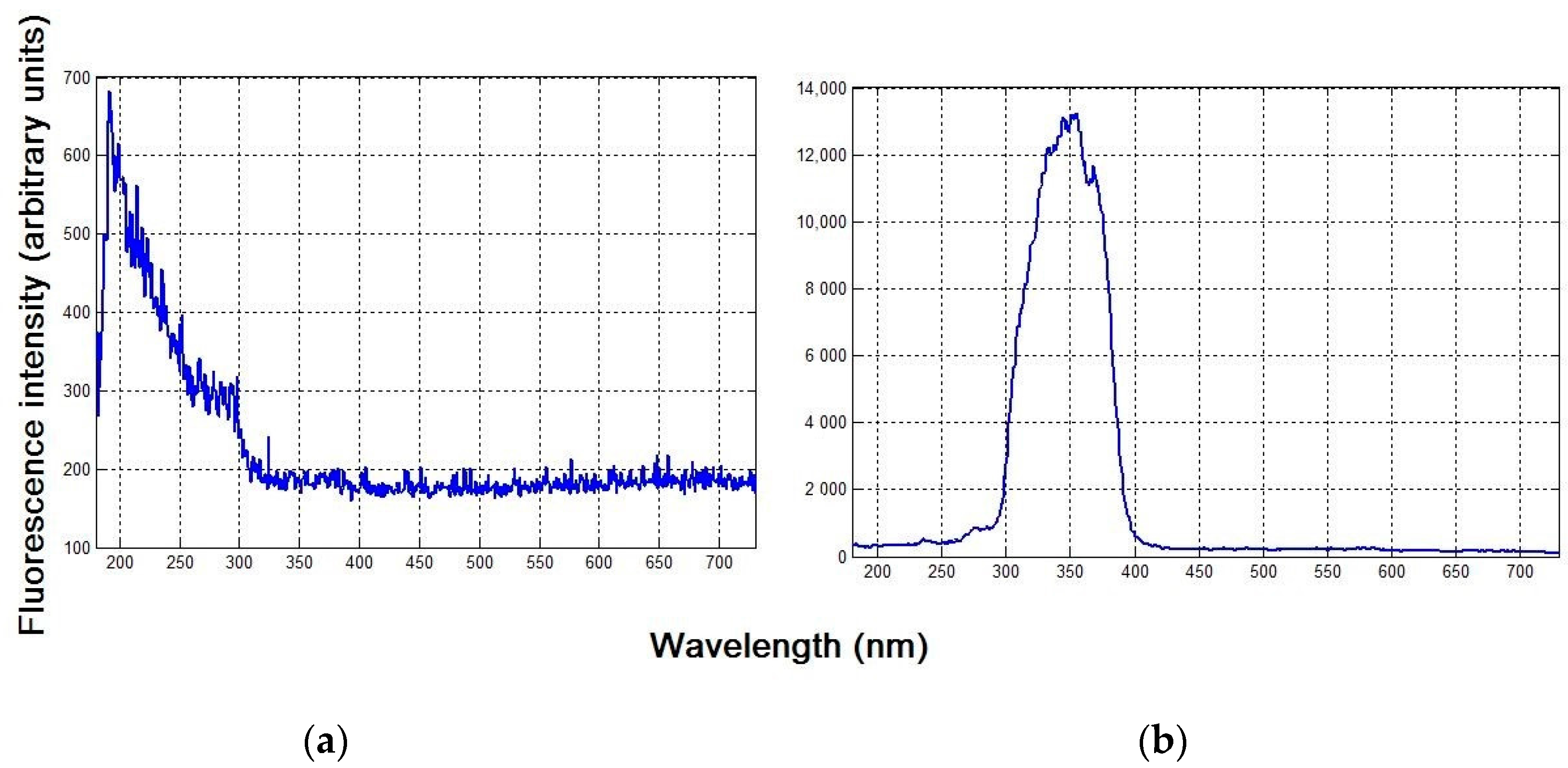
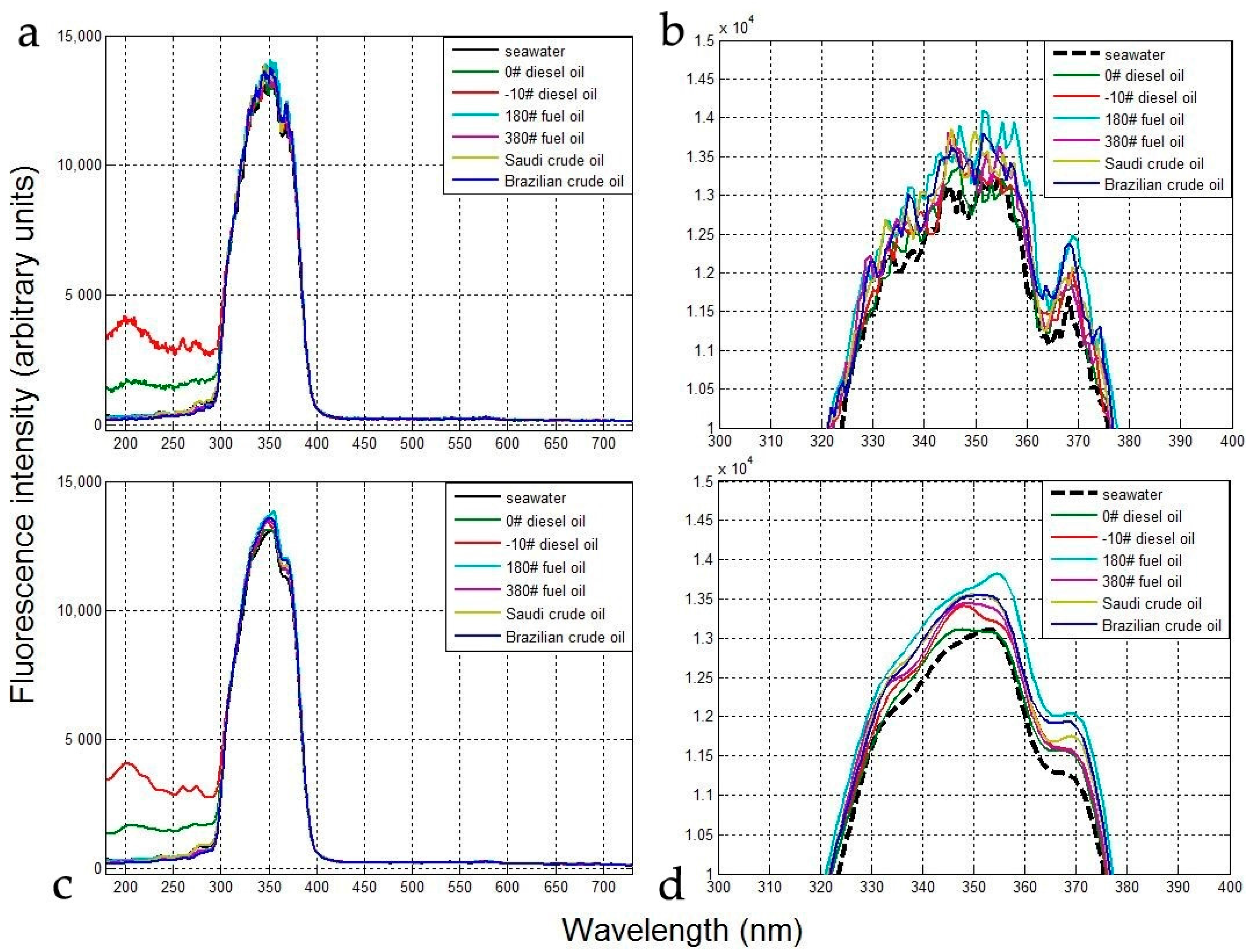
4.1. Fluorescence Spectra of Clean Seawater and Six Oil Samples
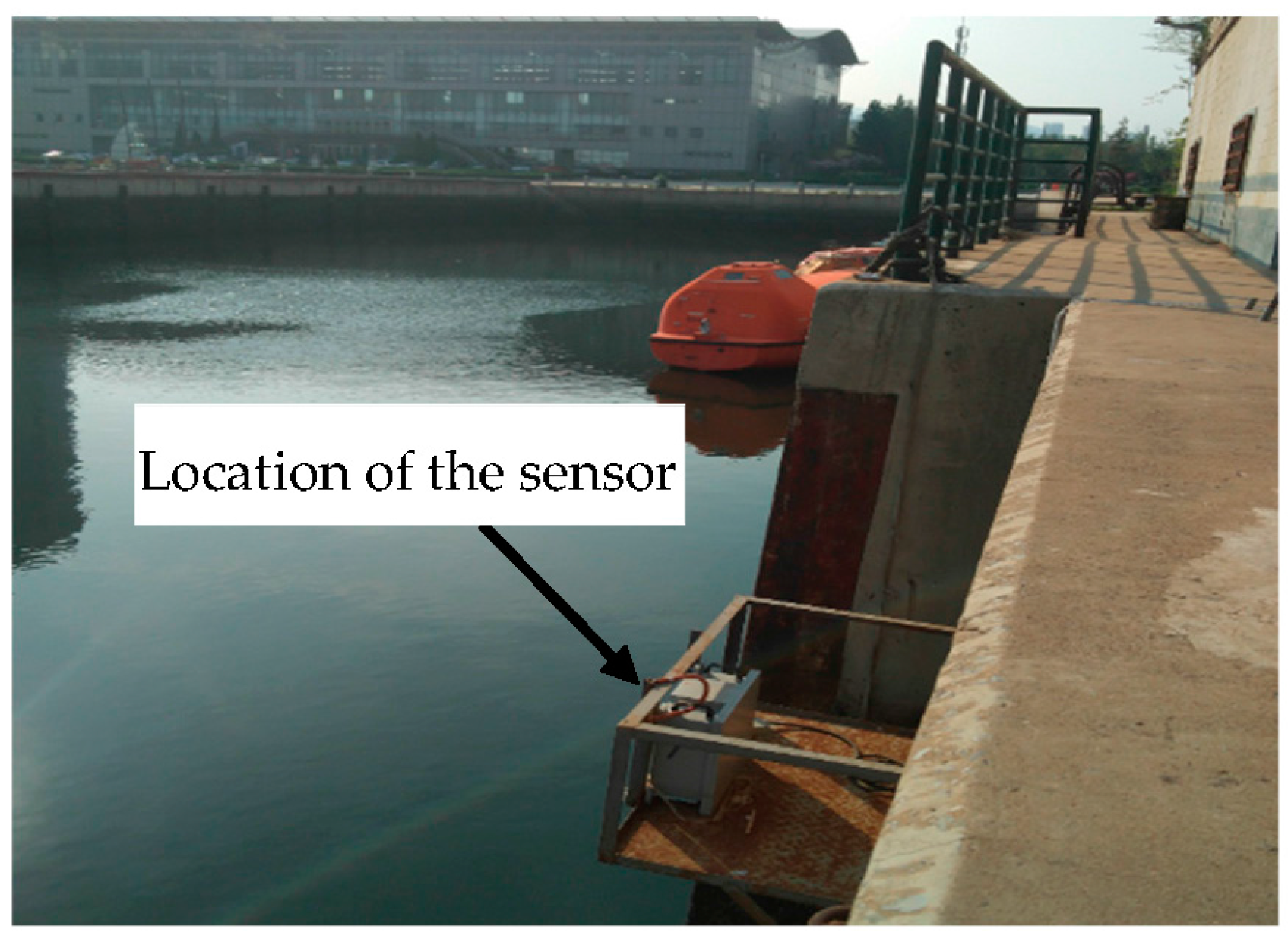
4.2. FFS-Based Coastal-Mounted Sensor for Operation and Experiment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Danovaro, R.; Carugati, L.; Marco, B. Implementing and innovating marine monitoring approaches for assessing marine environmental status. Front. Mar. Sci. 2016, 3, 213. [Google Scholar] [CrossRef]
- Smith, M.A. Marine Environmental Law, Policy and Security Amid Arctic Climate Change: Cooperation and Conflict in Creating a Pan-Arctic Marine Protected Area Network; Nova Southeastern University: Fort Lauderdale, FL, USA, 2016. [Google Scholar]
- Alves, T.M.; Kokinou, E.; Zodiatis, G. A three-step model to assess shoreline and offshore susceptibility to oil spills: The South Aegean (Crete) as an analogue for confined marine basins. Mar. Pollut. Bull. 2014, 86, 443–457. [Google Scholar] [CrossRef] [PubMed]
- Alves, T.M.; Kokinou, E.; Zodiatis, G. Modelling of oil spills in confined maritime basins: The case for early response in the Eastern Mediterranean Sea. Environ. Pollut. 2015, 206, 390–399. [Google Scholar] [CrossRef] [PubMed]
- Alves, T.M.; Kokinou, E.; Zodiatis, G. Multidisciplinary oil spill modeling to protect coastal communities and the environment of the Eastern Mediterranean Sea. Sci. Rep. 2016, 6, 36882. [Google Scholar] [CrossRef] [PubMed]
- Yang, T. Dynamic assessment of environmental damage based on the optimal clustering criterion—Taking oil spill damage to marine ecological environment as an example. Ecol. Indic. 2014, 51, 53–58. [Google Scholar] [CrossRef]
- Hildur, K.; Templado, C.; Zock, J.P. Follow-Up genotoxic study: Chromosome damage two and six years after exposure to the prestige oil spill. PLoS ONE 2015, 10, 837–845. [Google Scholar] [CrossRef] [PubMed]
- Lardner, R.; Zodiatis, G. Modelling oil plumes from subsurface spills. Mar. Pollut. Bull. 2017, 124, 94–101. [Google Scholar] [CrossRef] [PubMed]
- Delpeche-Ellmann, N.C.; Soomere, T. Investigating the Marine Protected Areas most at risk of current-driven pollution in the Gulf of Finland, the Baltic Sea, using a Lagrangian transport model. Mar. Pollut. Bull. 2013, 67, 121–129. [Google Scholar] [CrossRef] [PubMed]
- Babichenko, S.; Dudelzak, A.; Poryvkina, L. Laser remote sensing of coastal and terrestrial pollution by FLS-LIDAR. EARSeL eProc. 2004, 3, 1–7. [Google Scholar]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Jha, M.N.; Levy, J.; Gao, Y. Advances in remote sensing for oil spill disaster management: State-of-the-art sensors technology for oil spill surveillance. Sensors 2008, 8, 236–255. [Google Scholar] [CrossRef] [PubMed]
- Brown, C.E.; Fingas, M.F. Review of the development of laser fluorosensors for oil spill application. Mar. Pollut. Bull. 2003, 47, 477–484. [Google Scholar] [CrossRef]
- Li, Y.; Liu, B.X.; Li, B.Y. Analysis of spectral characteristics of oil film on water based on wavelet transform. Spectrosc. Spectr. Anal. 2012, 32, 1923–1927. [Google Scholar]
- Chase, C.R.; Van Bibber, S. Utilization of Automated Oil Spill Detection Technology for Clean Water Compliance and Spill Discharge Prevention; InterOcean Systems, Inc.: SanDiego, CA, USA, 2006; Volume 15. [Google Scholar]
- Tebeau, P.A.; Hansen, K.A.; Fant, J.W. Assessing the long-term implementation costs versus benefits associated with laser fluorosensor spill response technology. In Proceedings of the Arctic and Marine Oilspill Program (AMOP) Technical Seminar, Edmonton, AB, Canada, 5–7 June 2007. [Google Scholar]
- Baszanowska, E.; Otremba, Z.; Toczek, H. Fluorescence spectra of oil after it contacts with aquatic environment. J. KONES 2013, 20, 29–34. [Google Scholar]
- Fingas, M.; Brown, C.E. Detection of oil in ice and snow. J. Mar. Sci. Eng. 2013, 1, 10–20. [Google Scholar] [CrossRef]
- Christensen, J.H.; Hansen, A.B.; Mortensen, J. Characterization and matching of oil samples using fluorescence spectroscopy and parallel factor analysis. Anal. Chem. 2005, 77, 2210–2217. [Google Scholar] [CrossRef] [PubMed]
- Bünting, U.; Karlitschek, P.; Lewitzka, F. Analysis of fluorescence tracers in water by a mobile fiber-optical laser-fluorimeter. In Proceedings of the Conference on Lasers and Electro-Optics, San Francisco, CA, USA, 7–11 May 2000. [Google Scholar]
- Baszanowska, E.; Otremba, Z. Fluorometric index for sensing oil in the sea environment. Sensors 2017, 17, 1276. [Google Scholar] [CrossRef] [PubMed]
- Karlitschek, P.; Lewitzka, F.; Bünting, U. Detection of aromatic pollutants in the environment by using UV-laser-induced fluorescence. Appl. Phys. B Lasers Opt. 1998, 67, 497–504. [Google Scholar] [CrossRef]
- Saito, Y.; Takano, K.; Kobayashi, F. Development of a UV laser-induced fluorescence lidar for monitoring blue-green algae in Lake Suwa. Appl. Opt. 2014, 53, 7030–7036. [Google Scholar] [CrossRef] [PubMed]
- Hillrichs, G.; Neu, W. UV laser induced fluorescence to determine organic pollutions in water. Laser Remote Sens. 1994, 4, 109–112. [Google Scholar]
- Bublitz, J.; Dickenhausen, M.; Grätz, M. Fiber-optic laser-induced fluorescence probe for the detection of environmental pollutants. Appl. Opt. 1995, 34, 3223–3233. [Google Scholar] [CrossRef] [PubMed]
- Hillrichs, G.; Karlitschek, P.; Neu, W. Fiber optic aspects of UV laser spectroscopic in situ detection of water pollutants. Int. Soc. Opt. Eng. 1994, 2293, 178–185. [Google Scholar]
- Wang, H.; Liu, Z.; Kim, S. Microfluidic acoustophoretic force based low-concentration oil separation and detection from the environment. Lab. Chip 2014, 14, 947–956. [Google Scholar] [CrossRef] [PubMed]
- Neil, R.A.; Bujabijunas, L.; Rayner, D.M. Field performance of a laser fluorosensor for the detection of oil spills. Appl. Opt. 1980, 19, 863–870. [Google Scholar]
- Miller, A.R.; Brown, R.M.; Vegh, E. New derivation for the rough-surface reflection coefficient and for the distribution of sea-wave elevations. IET 1984, 131, 114–116. [Google Scholar] [CrossRef]
- Accetta, J.S.; Shumaker, D.L. The Infrared and Electro-Optical Systems Handbook; Infrared Information Analys; SPIE Optical Engineering Press: Bellingham, WA, USA, 1993. [Google Scholar]
- Hengstermann, T.; Reuter, R. Laser remote sensing of pollution of the sea: A quantitative approach. Eur. Assoc. Remote Sens. Lab. Adv. Remote Sens. 1992, 1, 52–60. [Google Scholar]
- Baszanowska, E.; Otremba, Z. Spectral signatures of fluorescence and light absorption to identify crude oils found in the marine environment. J. Eur. Opt. Soc. Rapid Publ. 2014, 9, 4583–4587. [Google Scholar] [CrossRef]
- Almhdi, K.M.; Valigi, P.; Gulbinas, V. Classification with Artificial Neural Networks and Support Vector Machines: Application to oil fluorescence spectra. EARSeL eProc. 2007, 6, 115–129. [Google Scholar]
- Wang, C.; Shi, X.; Li, W. Oil species identification technique developed by Gabor wavelet analysis and support vector machine based on concentration-synchronous-matrix-fluorescence spectroscopy. Mar. Pollut. Bull. 2016, 104, 322–328. [Google Scholar] [CrossRef] [PubMed]
- Oh, S.; Seo, D.; Ann, K. Oil fluorescence spectrum analysis for the design of fluorimeter. J. Korean Soc. Mar. Environ. Energy 2015, 18, 304–309. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The detection subassemblies | Excitation wavelength | 200–300 nm |
| Detection wavelength | 300–400 nm | |
| Detection range | 0–5 m | |
| Detection frequency | 0.1–1 Hz | |
| Temperature range | −20–+70 °C | |
| The case of the sensor | Size | roughly 45 × 40 × 20 cm |
| Material | stainless-steel | |
| Protection level | IP66 |
| Oil Type | Oil Sample | API | Number |
|---|---|---|---|
| Light fuel oil | −10# diesel oil | 38.2 | 1 |
| 0# diesel oil | 38.2 | 2 | |
| Heavy fuel oil | 180# fuel oil | 11.3 | 3 |
| 380# fuel oil | 11.3 | 4 | |
| Crude oil | Saudi crude oil | 33.7 | 5 |
| Brazilian crude oil | 18.1 | 6 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, Y.; Li, Y.; Liu, B.; Liu, Y.; Wang, T. Design and Implementation of a Coastal-Mounted Sensor for Oil Film Detection on Seawater. Sensors 2018, 18, 70. https://doi.org/10.3390/s18010070
Hou Y, Li Y, Liu B, Liu Y, Wang T. Design and Implementation of a Coastal-Mounted Sensor for Oil Film Detection on Seawater. Sensors. 2018; 18(1):70. https://doi.org/10.3390/s18010070
Chicago/Turabian StyleHou, Yongchao, Ying Li, Bingxin Liu, Yu Liu, and Tong Wang. 2018. "Design and Implementation of a Coastal-Mounted Sensor for Oil Film Detection on Seawater" Sensors 18, no. 1: 70. https://doi.org/10.3390/s18010070
APA StyleHou, Y., Li, Y., Liu, B., Liu, Y., & Wang, T. (2018). Design and Implementation of a Coastal-Mounted Sensor for Oil Film Detection on Seawater. Sensors, 18(1), 70. https://doi.org/10.3390/s18010070