Envelope Correction of Micro-Motion Targets in the Terahertz ISAR Imaging


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
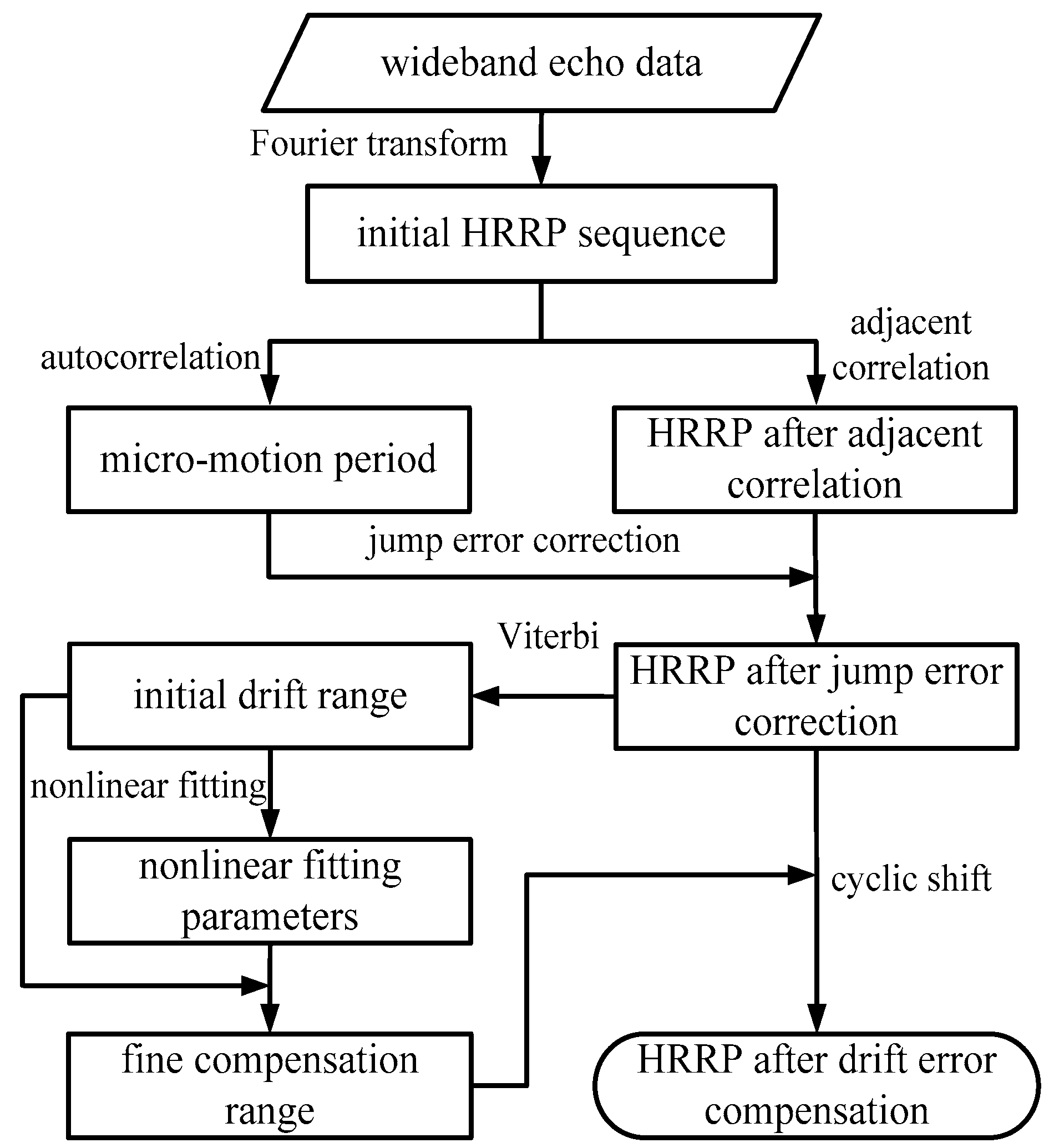
2. Envelope Correction Method
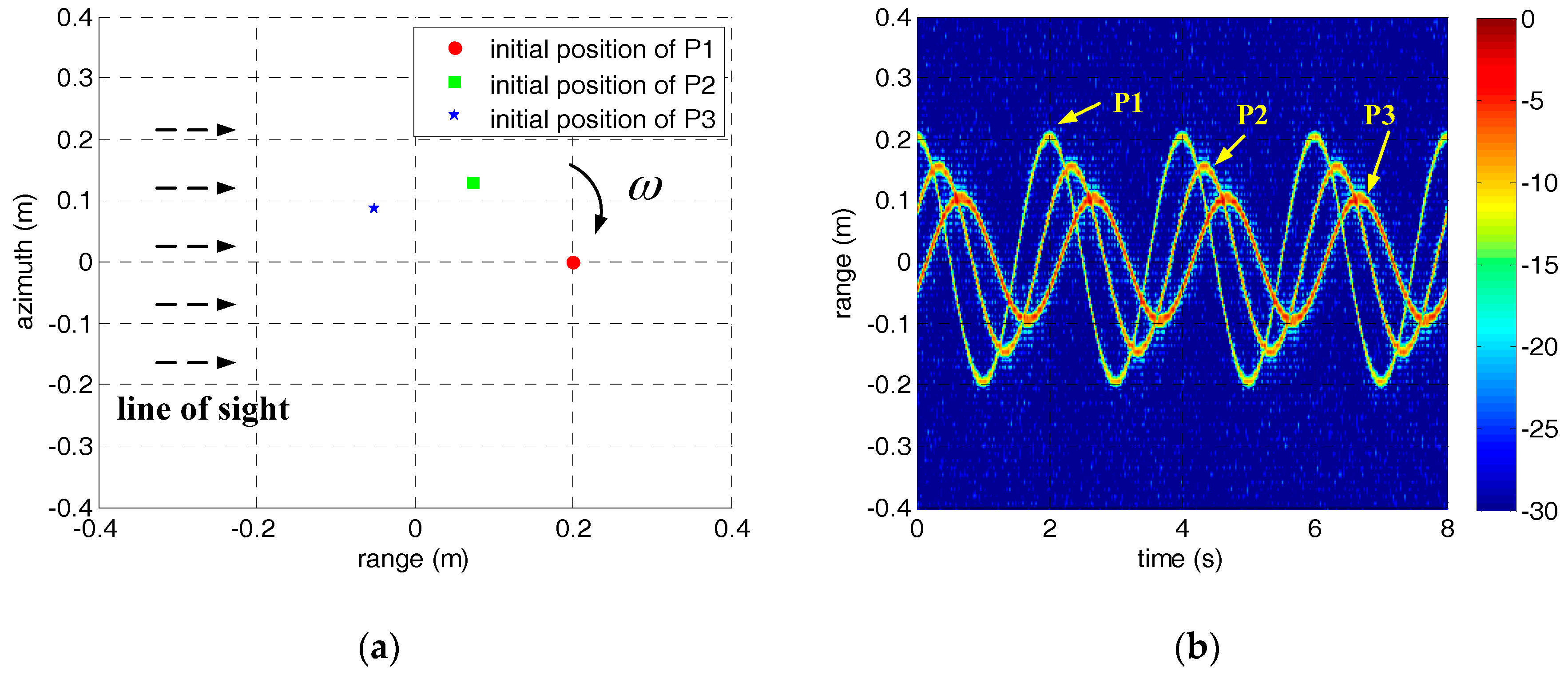
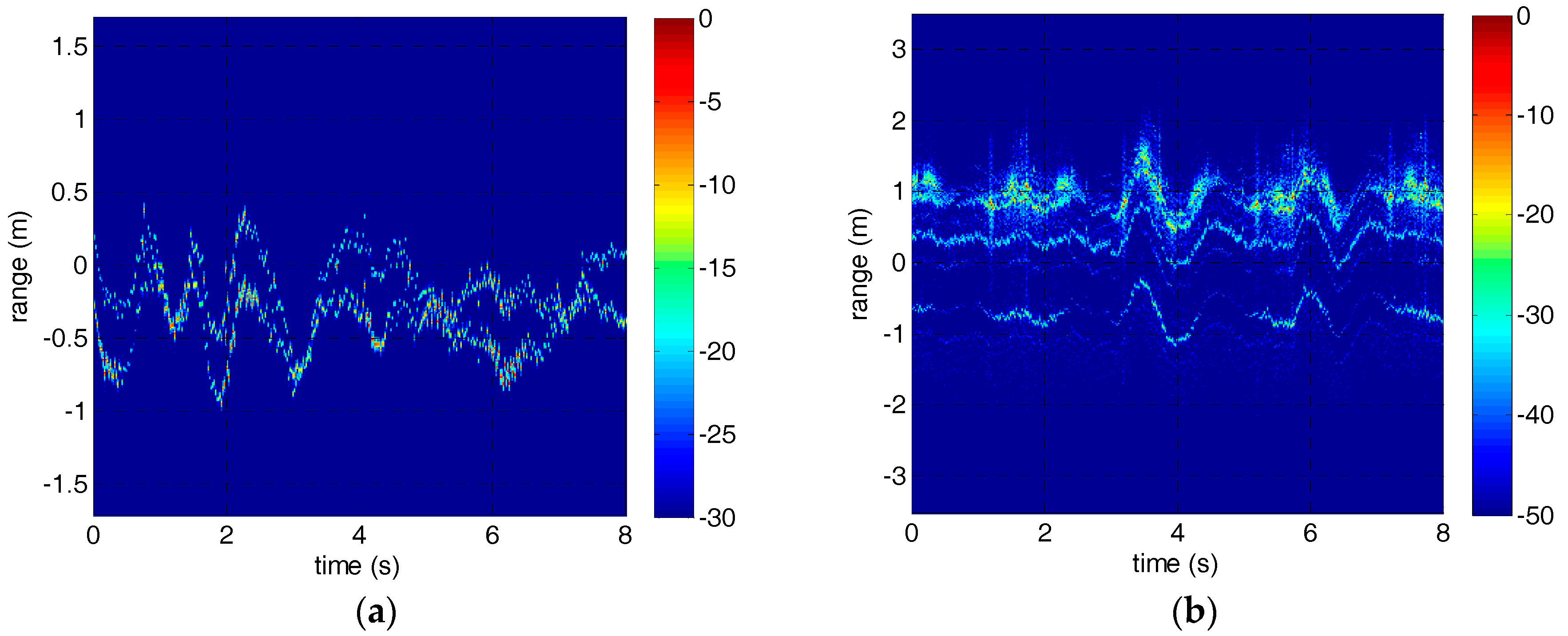
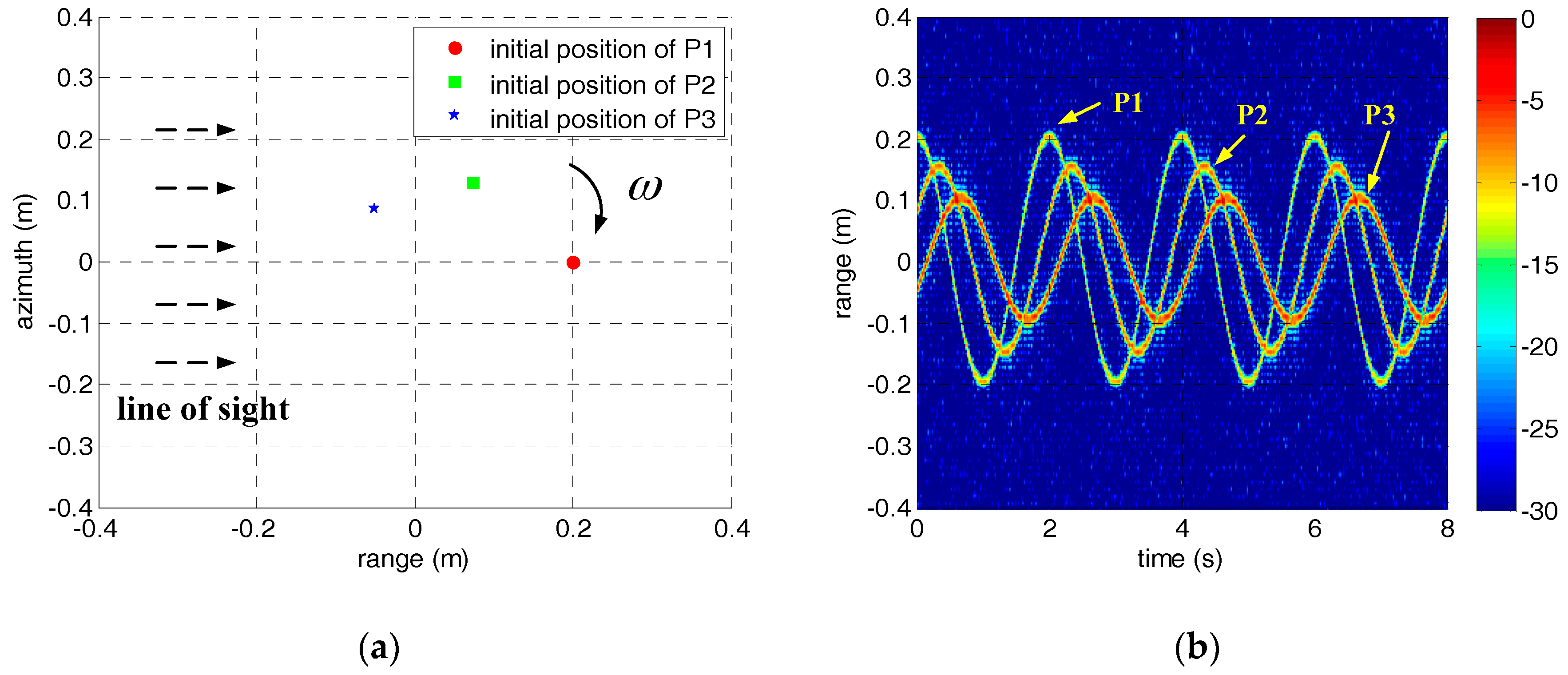
2.1. Signal Model of Micro-Motion Targets and Simulation Scenario
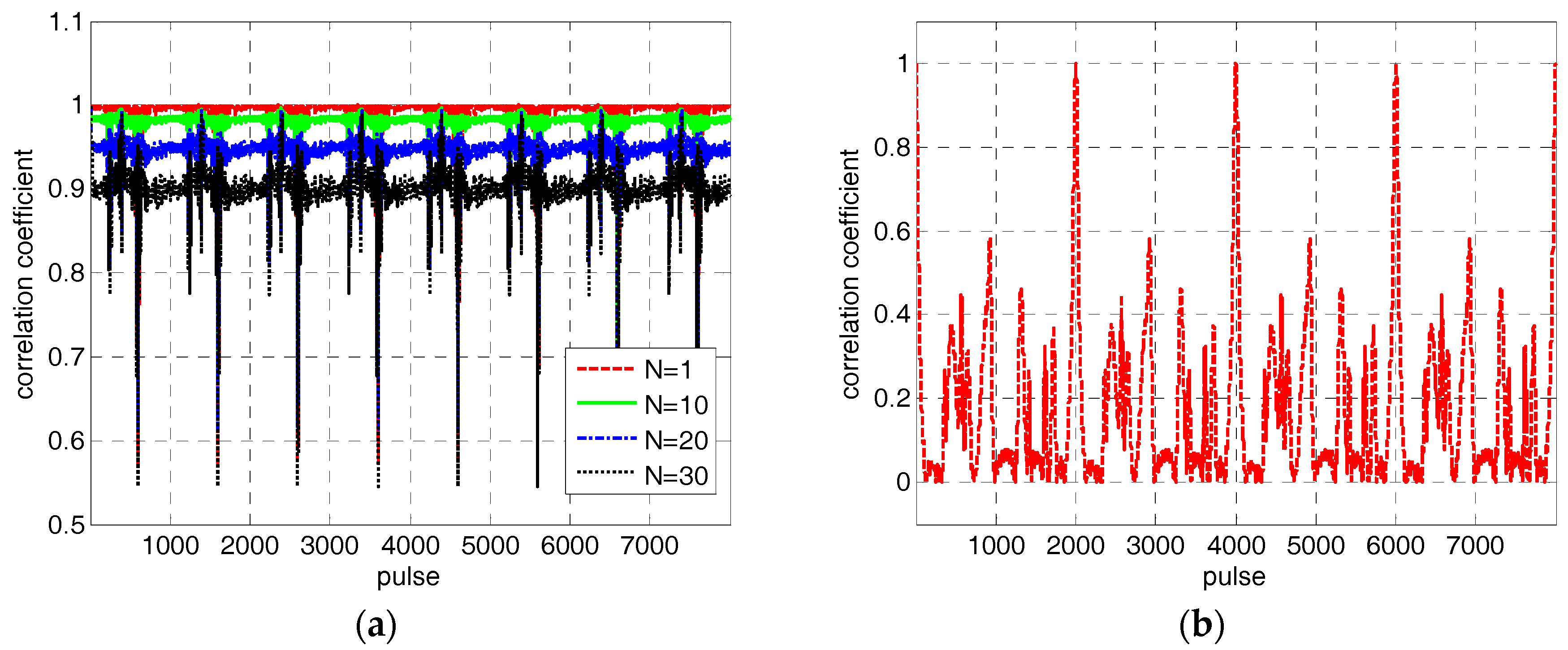
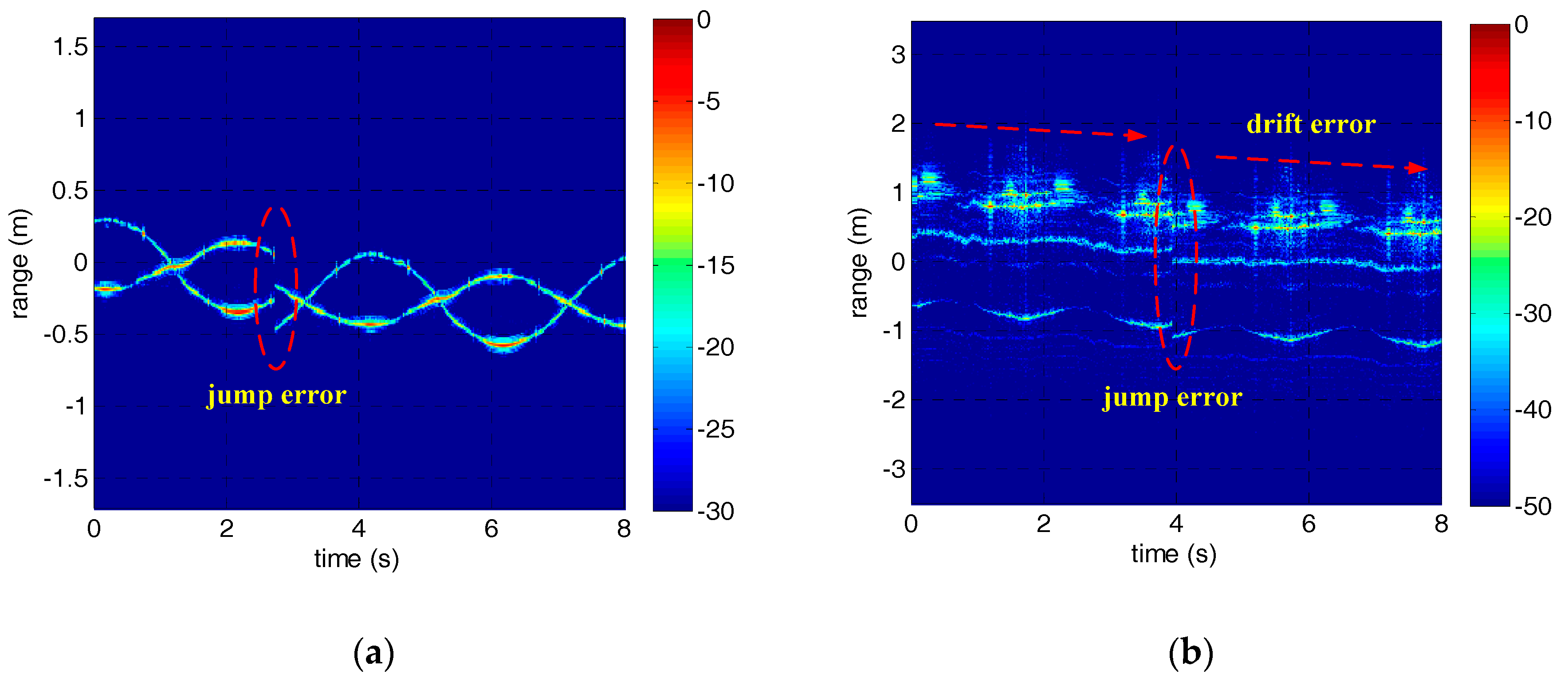
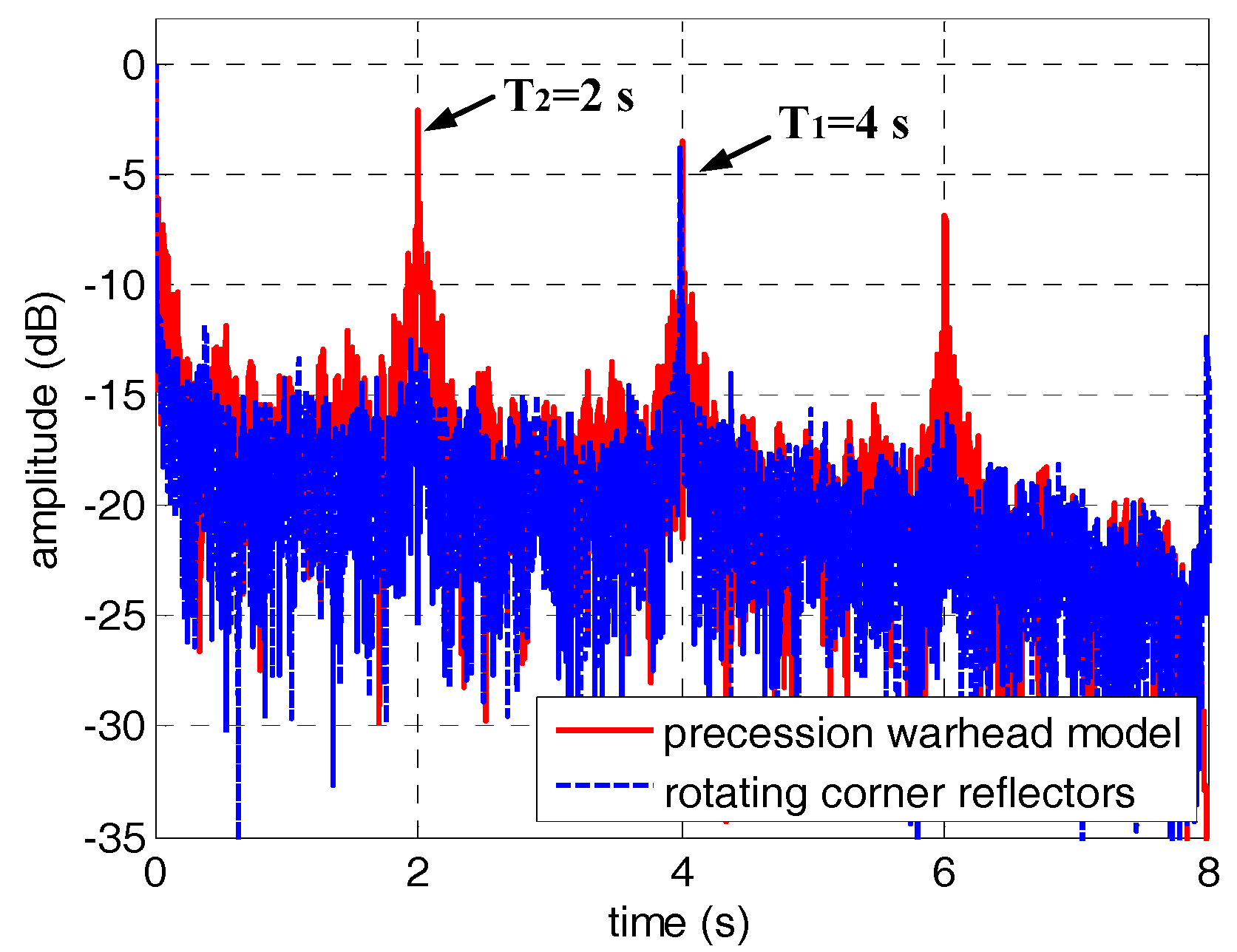
2.2. Jump Error Correction Method Based on the Periodicity of the HRRP
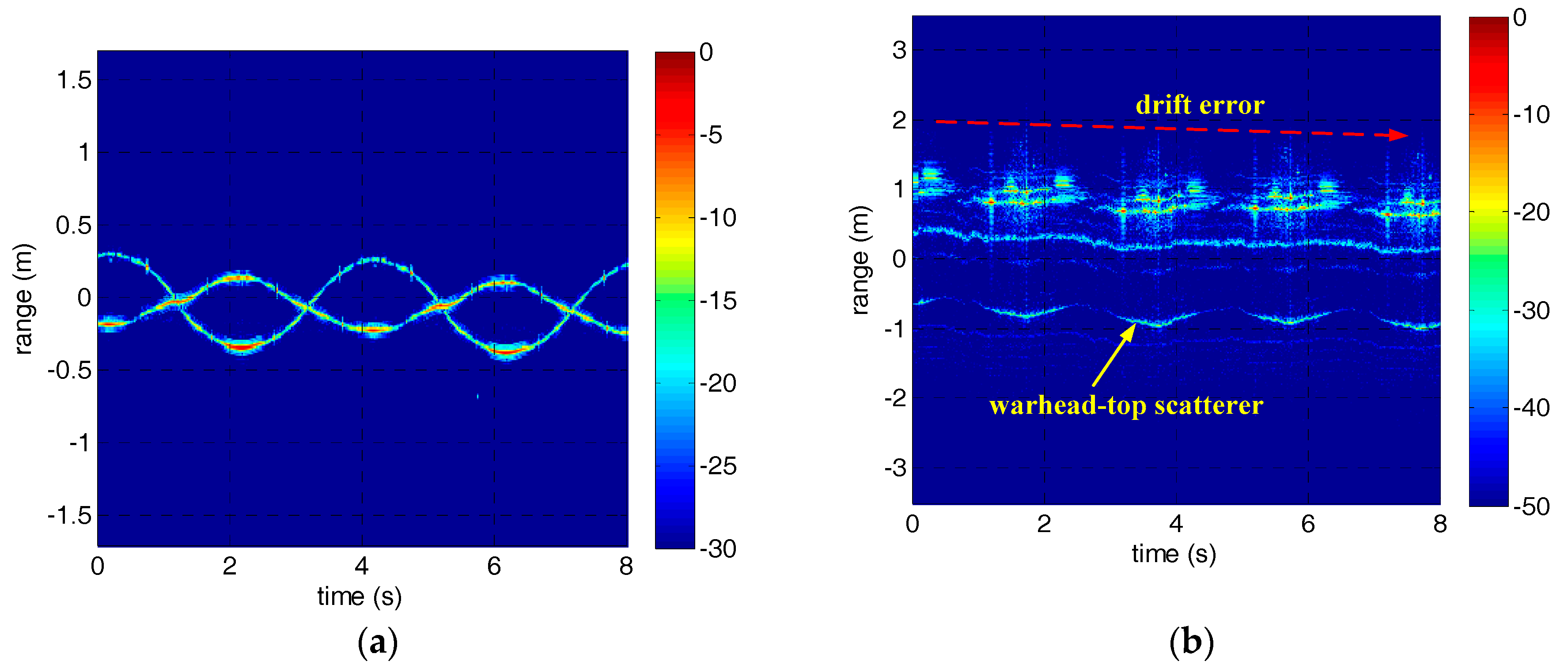
2.3. Drift Error Compensation Method Based on the Sinusoidal Characteristic of the HRRP
3. Experiments and Data Processing Results
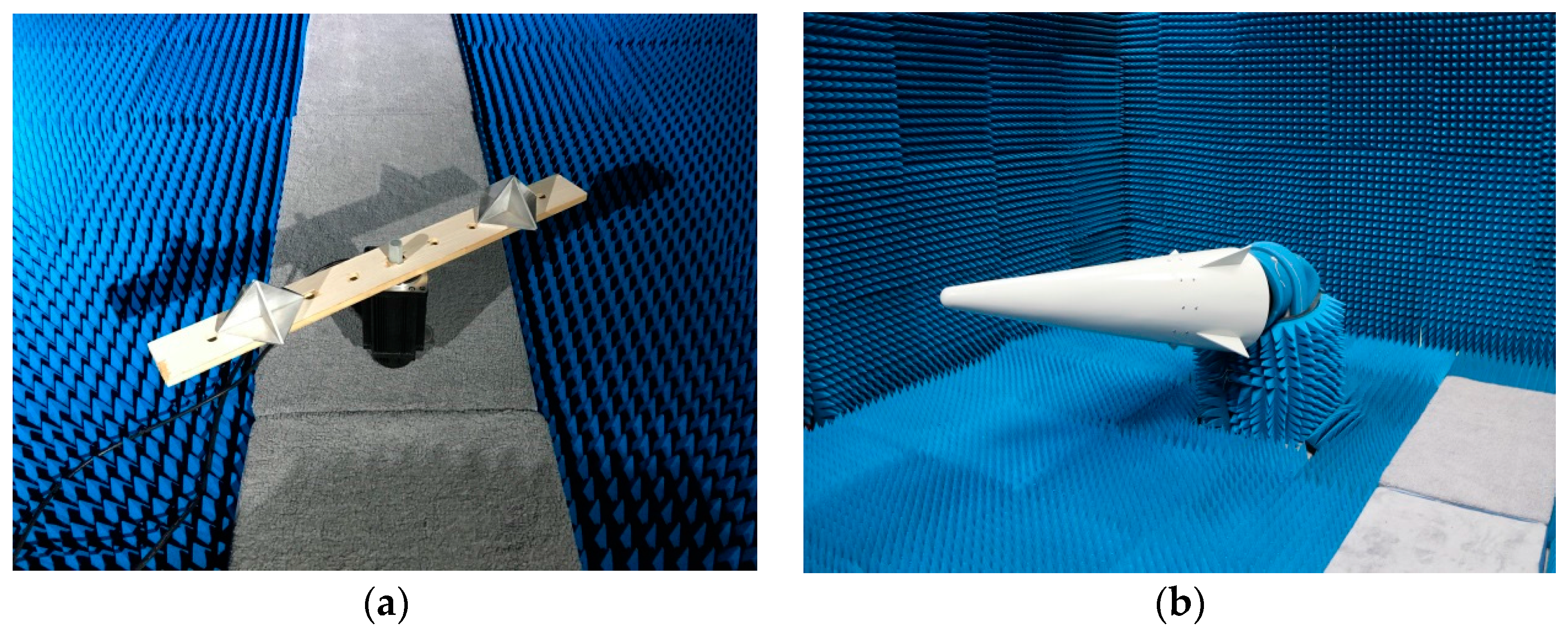
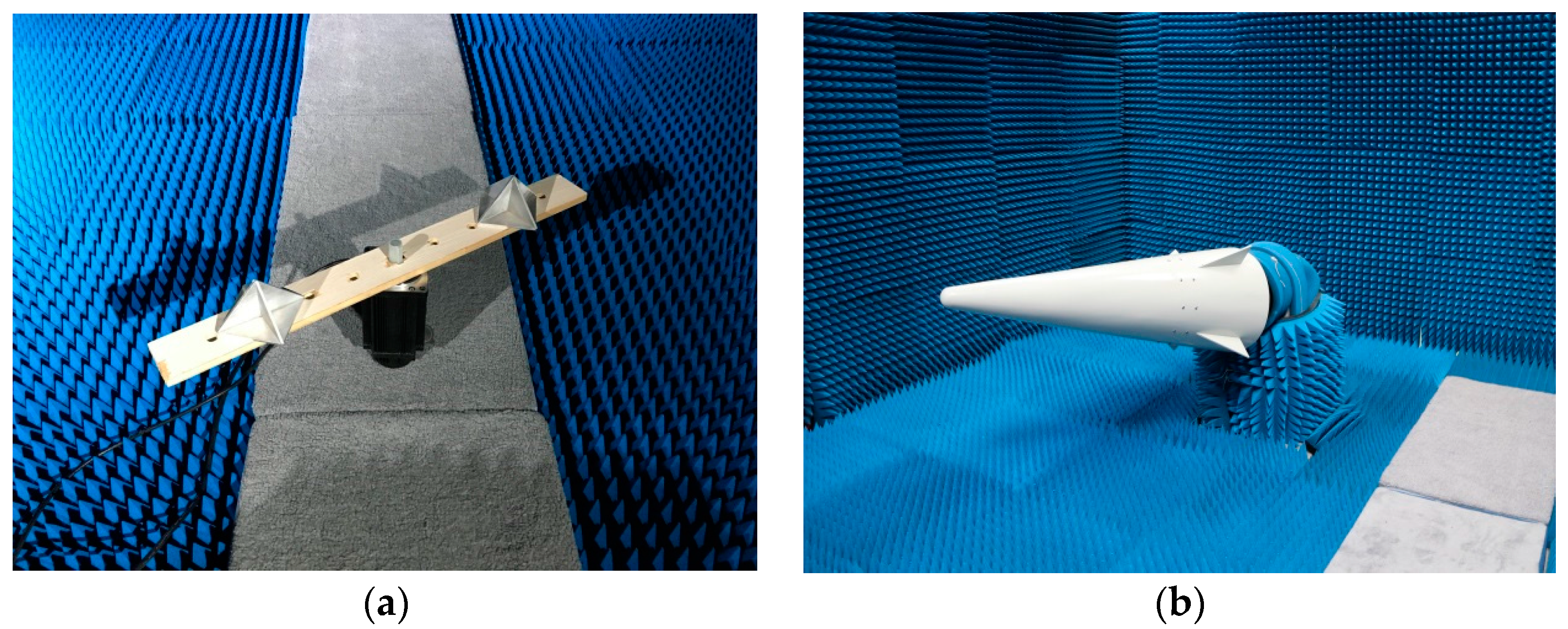
3.1. Terahertz Radar System and Experiments
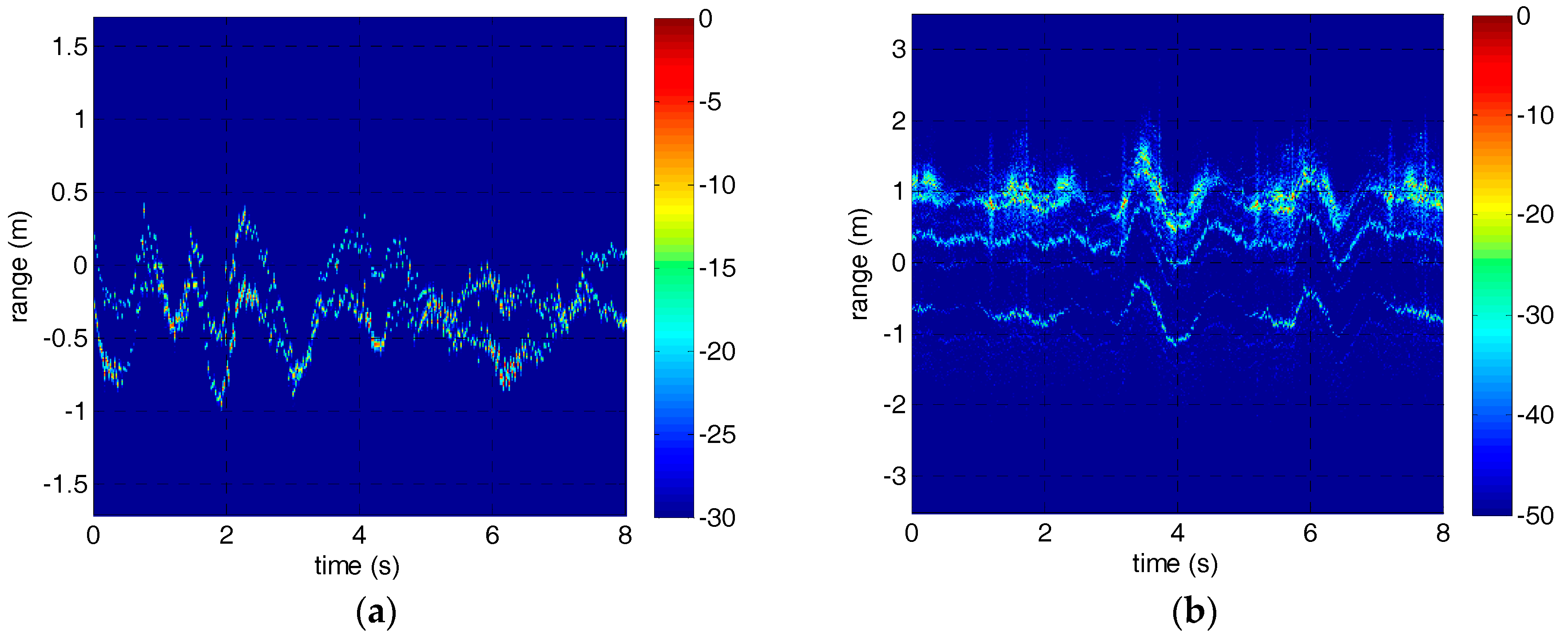
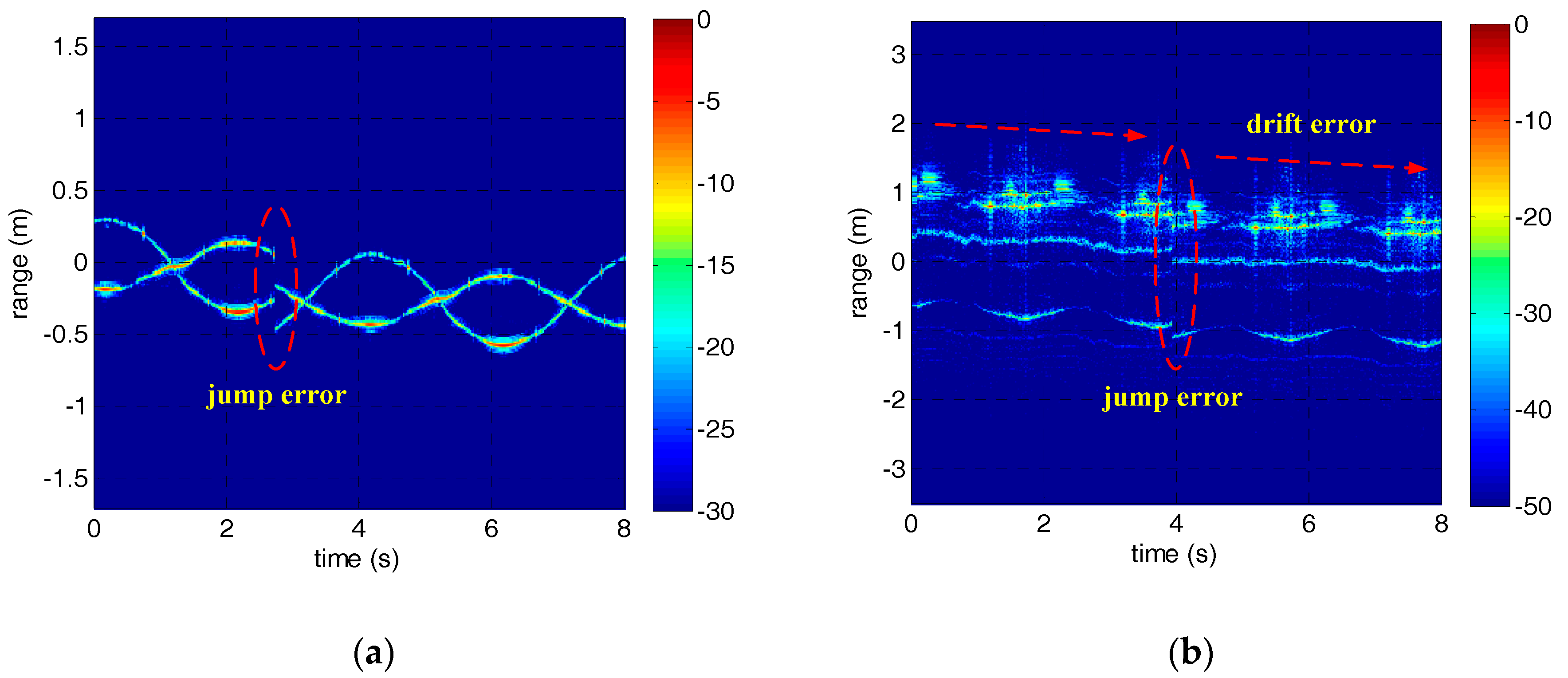
3.2. Experimental Results
3.3. Performance Analysis of the Method
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, L.; Zhou, F.; Tao, M.L.; Sun, P.; Zhang, Z.J. Adaptive translational motion compensation method for ISAR imaging under low SNR based on particle swarm optimization. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5146–5157. [Google Scholar] [CrossRef]
- Li, D.; Zhan, M.Y.; Liu, H.Q.; Liao, L.; Liao, G.S. A robust translational motion compensation method for ISAR imaging based on Keystone transform and Fractional Fourier transform under low SNR environment. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2140–2156. [Google Scholar] [CrossRef]
- Mohapatra, B.B.; Rjagopal, S.; Va, A.H. Translation motion estimation and compensation in inverse synthetic aperture radar. In Proceedings of the IEEE International Conference on Electronics, Computing and Communication Technologies (IEEE CONECCT), Bangalore, India, 6–7 January 2014; pp. 1–5. [Google Scholar]
- Wang, J.; Liu, X. Improved global range alignment for ISAR. IEEE Trans. Aerosp. Electron. Syst. 2007, 39, 351–357. [Google Scholar] [CrossRef]
- Liu, Z.; Liao, G.; Yang, Z. iterative range alignment method with optimized weighted fitting for an inverse synthetic aperture radar. IET Radar Sonar Navig. 2012, 6, 764–773. [Google Scholar] [CrossRef]
- Li, Y.; Xing, M.; Sun, J.; Quan, Y. A new algorithm of ISAR imaging for maneuvering targets with low SNR. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 543–557. [Google Scholar] [CrossRef]
- Li, J.Q.; He, S.S.; Feng, C.Q.; Wang, Y.Z. Method for compensating translational motion of rotational symmetric target based on local symmetry cancellation. J. Syst. Eng. Electron. 2017, 28, 36–39. [Google Scholar] [CrossRef]
- Zhang, W.P.; Li, K.L.; Jiang, W.D. Micro-motion frequency estimation of radar targets with complicated translations. AEU-Int. J. Electron. Commun. 2015, 69, 903–914. [Google Scholar] [CrossRef]
- Bin, Y.; Chen, Z.P.; Xu, S.Y. Micro-Doppler analysis and separation based on complex local mean decomposition for aircraft with fast-rotating parts in ISAR imaging. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1285–1298. [Google Scholar]
- Bai, X.R.; Zhou, F.; Xing, M.D.; Bao, Z. High resolution ISAR imaging of targets with rotating parts. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2530–2543. [Google Scholar] [CrossRef]
- Bai, X.R.; Zhou, F.; Bao, Z. High-Resolution Three-Dimensional Imaging of Space Targets in Micromotion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3428–3440. [Google Scholar] [CrossRef]
- Liu, T.; Cao, Z.; Min, R. An envelope alignment method for terahertz radar ISAR imaging of maneuvering targets. In Proceedings of the 2015 International Conference on Communications, Signal Processing, and Systems, Sharjah, UAE, 12–19 February 2016; Volume 386, pp. 153–160. [Google Scholar]
- Yang, Q.; Qin, Y.L.; Deng, B.; Wang, H.Q.; You, P. Micro-Doppler ambiguity resolution for wideband terahertz radar using intra-pulse interference. Sensors 2017, 17, 993. [Google Scholar] [CrossRef] [PubMed]
- Sun, Z.; Li, B.; Lu, Y. Research on micro-motion and micro-Doppler of ballistic targets. In Proceedings of the 2009 IET International Radar Conference, Guilin, China, 20–22 April 2009; pp. 1–4. [Google Scholar]
- Zhang, W.; Li, K.; Jiang, W. Parameter estimation of radar targets with macro-motion and micro-motion based on circular correlation coefficients. IEEE Signal Process. Lett. 2015, 22, 633–637. [Google Scholar] [CrossRef]
- Djurovic, I.; Stankovic, L. An algorithm for the Wigner distribution based instantaneous frequency estimation in a high noise environment. Signal Process. 2004, 84, 631–643. [Google Scholar] [CrossRef]
- Zeng, Q.; Li, Y.; Deng, X. Adaptive time-frequency peak filtering based on convex sets and the Viterbi algorithm. IEEE Geosci. Remote Sens. Lett. 2017, 12, 1267–1271. [Google Scholar] [CrossRef]
- Yang, Q.; Deng, B.; Wang, H.Q.; Qin, Y.L.; Ding, W.X. Doppler aliasing free micro-motion parameter estimation algorithm based on the spliced time-frequency image and inverse Radon transform. In Proceedings of the 2014 International Conference on Information and Communications Technologies, Nanjing, China, 24 September 2014; pp. 1–6. [Google Scholar]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Q.; Deng, B.; Wang, H.; Qin, Y.; Zhang, Y. Envelope Correction of Micro-Motion Targets in the Terahertz ISAR Imaging. Sensors 2018, 18, 228. https://doi.org/10.3390/s18010228
Yang Q, Deng B, Wang H, Qin Y, Zhang Y. Envelope Correction of Micro-Motion Targets in the Terahertz ISAR Imaging. Sensors. 2018; 18(1):228. https://doi.org/10.3390/s18010228
Chicago/Turabian StyleYang, Qi, Bin Deng, Hongqiang Wang, Yuliang Qin, and Ye Zhang. 2018. "Envelope Correction of Micro-Motion Targets in the Terahertz ISAR Imaging" Sensors 18, no. 1: 228. https://doi.org/10.3390/s18010228
APA StyleYang, Q., Deng, B., Wang, H., Qin, Y., & Zhang, Y. (2018). Envelope Correction of Micro-Motion Targets in the Terahertz ISAR Imaging. Sensors, 18(1), 228. https://doi.org/10.3390/s18010228