1. Introduction
Today, a myriad of systems that are used directly or indirectly in our daily lives, e.g., cars, planes, and medical equipment, are controlled by distributed computing systems composed of sets of nodes that communicate with each other using communication networks to fulfill their global objectives. One network technology that is widely used to support short data exchanges is the Controller Area Network (CAN) [
1], with more than 700 million controllers sold every year [
2]. In the particular case of the automotive domain, CAN continues being the dominant network, despite the appearance of other contending technologies, e.g., FlexRay [
3], Ethernet [
4], and Real-Time Ethernet variants (e.g., AVB [
5] and TSN [
6]), or even the enhanced version of CAN with higher bandwidth, CAN-FD [
7]. Thus, we believe the work presented in this paper, based on CAN, but that can also be directly applicable to CAN-FD with minor changes, is still relevant in practice.
Some of the subsystems where CAN is used, e.g., active safety mechanisms, exhibit high safety requirements, and can benefit from using a time-triggered (TT) design approach. In TT systems, all activities, including message transmissions, are triggered in precise time instants to avoid contention in the access to shared resources, notably the bus. This approach has been typically implemented in a static way, where the messages’ schedule is obtained offline and saved in a table with the triggering instants [
8]. Naturally, this implementation approach does not tolerate the inclusion or removal of messages at run-time that were not defined in the design phase. This has limited the applicability of the TT approach to cases in which applications are either static or have a predefined set of operational modes that can then be switched online. Moreover, operational modes are not suitable to deal with errors.
Concerning transient errors, message recovery can be accomplished using temporal redundancy, spatial redundancy, or both. Spatial redundancy implies physical replication of nodes and/or transmission media, so messages are transmitted using different paths. In this case, the implementation costs can rise significantly and a more elaborated management is needed. Nevertheless, if the recovery of permanent errors is mandatory, then spatial redundancy must be used. Transient errors, which are a couple of orders of magnitude more frequent than permanent ones, can be mitigated with temporal redundancy, i.e., sending message replicas in different time instants, using the same communication path. In this paper, we consider time redundancy mechanisms, only, which are suitable to cases in which spatial redundancy is too costly or when permanent and transient faults must be simultaneously tolerated.
Time redundancy can be implemented in a systematic way or only when errors are detected. The former approach is typical in static TT approaches such as in the static segment of FlexRay [
3]. In this case, error detection leads to simply discarding the corrupted message and signaling the application. In this approach, the recovery is typically done with the following instance of the affected message. Other protocols use automatic retransmission by the sender upon error detection, e.g., CAN [
1]. This approach typically allows for a faster recovery and does not allocate unnecessary bandwidth in the absence of errors. However, a proper mechanism to bound the (unscheduled) retransmissions is needed, e.g., retransmissions within slots (see
Section 2), or else the communication system timeliness and predictability can be compromised. Some earlier approaches to assess the impact of errors on the timeliness of CAN, using its native event-triggered (ET) model [
9,
10], bounded stochastically the retransmissions load using an error model. Naturally, the analyses they proposed is tightly coupled with the accuracy of the error model and, if errors beyond the model happen, the timeliness of the whole system is compromised. This differs from our approach, in which the overall system timeliness is always guaranteed, and error model violations only have impact on the probability of transient error recovery. For this reason, we will not further consider such ET approaches.
In this paper, we propose designing TT systems with a dynamic approach based on the Flexible Time-Triggered (FTT) paradigm, which is a communication paradigm that combines TT communications with online scheduling. This feature allows for scheduling message transmissions in response to particular events, such as transmission errors, thus reducing the error recovery time and bandwidth utilization. Moreover, as message retransmissions are explicitly scheduled, it becomes possible to control the impact of such events on the remaining traffic and so maintaining the determinism of the TT approach. In this work, we consider the FTT implementation over CAN (FTT-CAN protocol). However, the recovery mechanism herein presented can be applied to other broadcast-based communication media that support the FTT paradigm, such as FlexRay [
11]. The application to CAN-FD is also immediate.
In previous work [
12], we considered a restricted fault model with a maximum of one fault per Elementary Cycle (EC). This paper removes this constraint, allowing for a more generic and realistic fault model, where faults are directly modeled by a Poisson process. Moreover, the paper also proposes a new mechanism that supports concurrent scheduling of multiple consecutive retransmissions. This mechanism is unique and essential to obtain high delivery probability for messages with short deadlines. The new error and recovery scenarios are identified and thoroughly described and analyzed. A method for computing a probabilistic guarantee for timely message transmission upon errors is also provided. Finally, the paper also presents a method to compute the amount of resources that must be allocated to the time-triggered traffic to guarantee that all the periodic messages in the system are correctly delivered to their recipients within a given reliability target.
The paper is organized as follows:
Section 2 presents the related work concerning temporal redundancy mechanisms in TT networks and
Section 3 describes the FTT-CAN protocol and its underpinnings, detailing also the new fault model.
Section 4 presents the error-recovery proposal, including an analysis of the error and recovery scenarios. In
Section 5, the methods and algorithms necessary to minimize the used bandwidth are presented, followed by
Section 6, where the proposal is assessed.
Section 7 describes the updates to the FTT-CAN protocol that must be implemented to support the functionality of the error recovery mechanism. Finally,
Section 8 concludes the paper.
Appendix A lists all acronyms and B the used benchmark message sets.
2. Background and Related Work
Time-Triggered protocols, e.g., TTP/C [
13], have traditionally used a Time-Division Multiple Access (TDMA) medium access mechanism, in which time is divided in slots that are exclusively and statically allocated to nodes, and within which predetermined messages are transmitted. This bandwidth allocation method grants these systems a predictable and steady behavior under any operational scenario, which is an important characteristic for the certification of safety-critical systems, e.g., X-by-wire systems [
14]. On the other hand, this method is rather inflexible in what concerns adjusting to varying operational conditions, either due to system reconfigurations or rare events. For instance, if an alarm generates a sporadic message with a deadline equal to 5 ms and an average inter-arrival time of 1000 ms, a static TDMA-based TT system must reserve a slot every 5 ms to guarantee a timely response to the alarm. Most of the time the slot is not used, contributing this way to a low bandwidth efficiency. The same happens in what concerns error recovery, since errors can occur at any time instant and require a reaction in an interval that is typically much shorter than average error inter-arrival time. Therefore, static TDMA systems that need high reliability require the transmission of several message instances that most of the times are useless.
In FlexRay networks the TT traffic is allocated statically to slots in the Static Segment (SS). Tanasa et al. [
15] propose a method to recover from message errors in the SS that basically defines the number of copies of each message that must be sent to obtain a global success probability (
GP) that must be greater than the intended system reliability,
ρ, for a given mission time. This can be achieved using Equation (1), where
N is the number of messages,
pi the error probability of message
i, obtained from the Bit Error Rate (BER) and number of transmitted bits, MT is the mission time, T
i the period of message
i, and
ki is the number of extra copies of message
i that shall be sent.
After obtaining all the ki values, a method based on Mixed-Integer Linear Programming (MILP) is used to minimize the number of static slots used for message replicas. The results presented there point to at least the duplication of the necessary bandwidth for typical BER values.
The work in [
16] presents the COSMIC middleware applied to a time-triggered CAN network, implementing a TDMA access scheme. It shows a method to recover errors in real-time messages. These messages are sent in dedicated offline-scheduled slots that are enlarged to allow for retransmissions using the CAN native error recovery method. The slot enlargement is then dependent on the number of faults foreseen by the fault model. This method is still inflexible, since the slots are scheduled at pre-runtime. Nevertheless, at runtime, the bandwidth assigned to retransmissions but not effectively used can be reclaimed to carry sporadic and non-real-time traffic, to allow for a more efficient bandwidth utilization. This is done simply by assigning higher CAN IDs (lower priority) to event-triggered or sporadic messages.
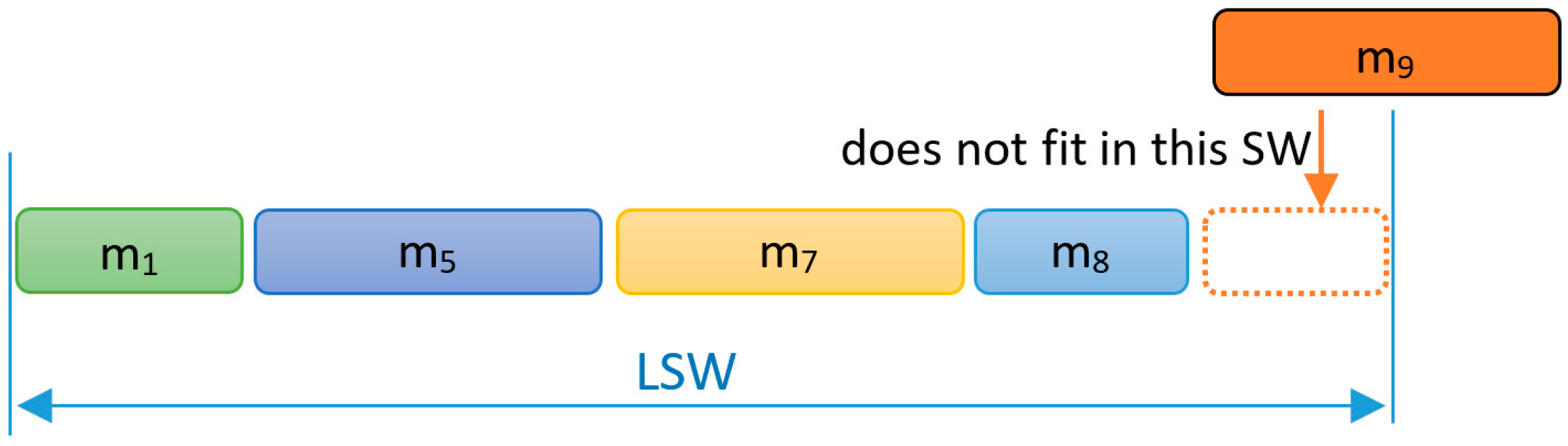
Short et al. [
17] present a mechanism to guarantee the message transmission in TDMA-based CAN networks. Messages are transmitted in specific windows or slots, which are enlarged to make room for CAN’s native automatic message retransmissions upon errors, but only if the retransmissions fit in the defined window. The paper presents a method to calculate the window size together with a simulation study that points to a bandwidth utilization reduction between 3% and 30%, on average, depending on the environment type (from Benign/Normal to Aggressive/Hostile, respectively) [
18], when compared with the case where a predefined number of message copies is sent to attain the same reliability level. The paper includes a test case where the mechanism is applied to a critical message with 8 bytes payload, a period of 100 ms and an intended transmission reliability of 10
−9 errors per hour and using an Aggressive environment with BER equal to 2.6 × 10
−7, showing that using the windowed method the intended reliability level is obtained with a window 26.4% shorter than using multiple copies, which in this case, implies the transmission of four copies. The implementation of this mechanism implies building specific hardware (FPGA based) for the nodes and is still inflexible in what concerns modifying the message set dynamically, as the schedule is built offline.
In the scope of FTT-CAN, slack time can be placed in the synchronous window to allow the automatic retransmission of messages affected by errors [
19]. This approach is more bandwidth efficient than the previous ones, since the extra-time allocated in the synchronous window is shared by all the TT messages sent in the current EC. The amount of slack time is dependent on the maximum number of errors considered in each EC and is always wasted when there are no errors, thus limiting the efficiency of the approach. Nevertheless, this approach allows for the recovery in the same cycle where errors occurred.
In this paper, we use a novel approach, which is based on a server that allocates dynamically bandwidth for retransmissions. The server parameterization uses a Poisson-based fault-model, allowing to guarantee a timely recovery of errors up to a given desired probability target. As opposed to previous works, in our proposal bandwidth is consumed only when errors do actually happen and the interference in the remaining TT traffic is strictly bounded by the server parameters, thus boosting the bandwidth efficiency.
4. Error Recovery in FTT-CAN
Unlike the methods reviewed in
Section 2, in FTT-CAN message retransmissions are scheduled dynamically, in a controlled way, in response to actual errors [
12]. This section describes how the error detection and rescheduling mechanisms are implemented on FTT-CAN, and presents an analytic formulation for computing the number of replicas required to attain a desired reliability level, applicable to messages that have short deadlines.
4.1. Error Detection and Retransmission Scheduling Mechanisms
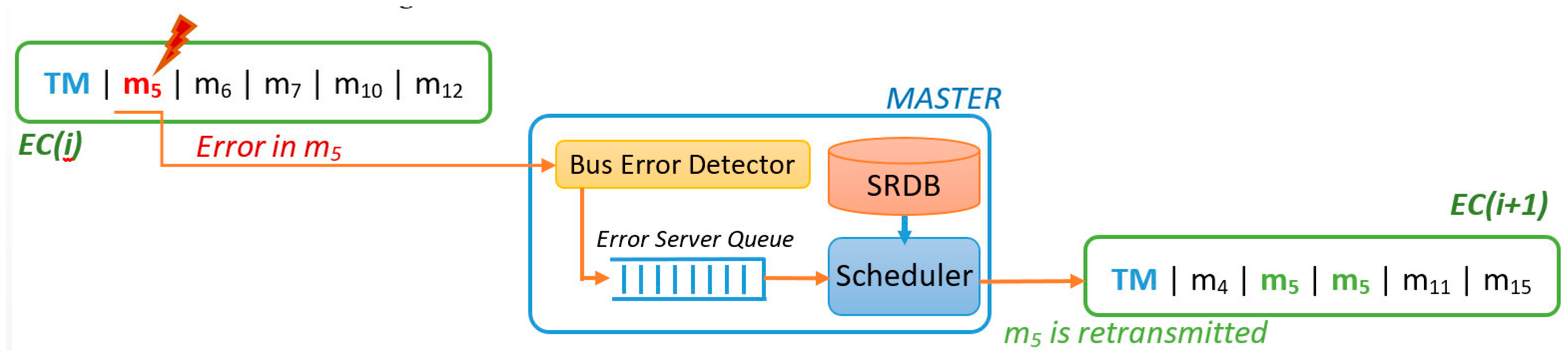
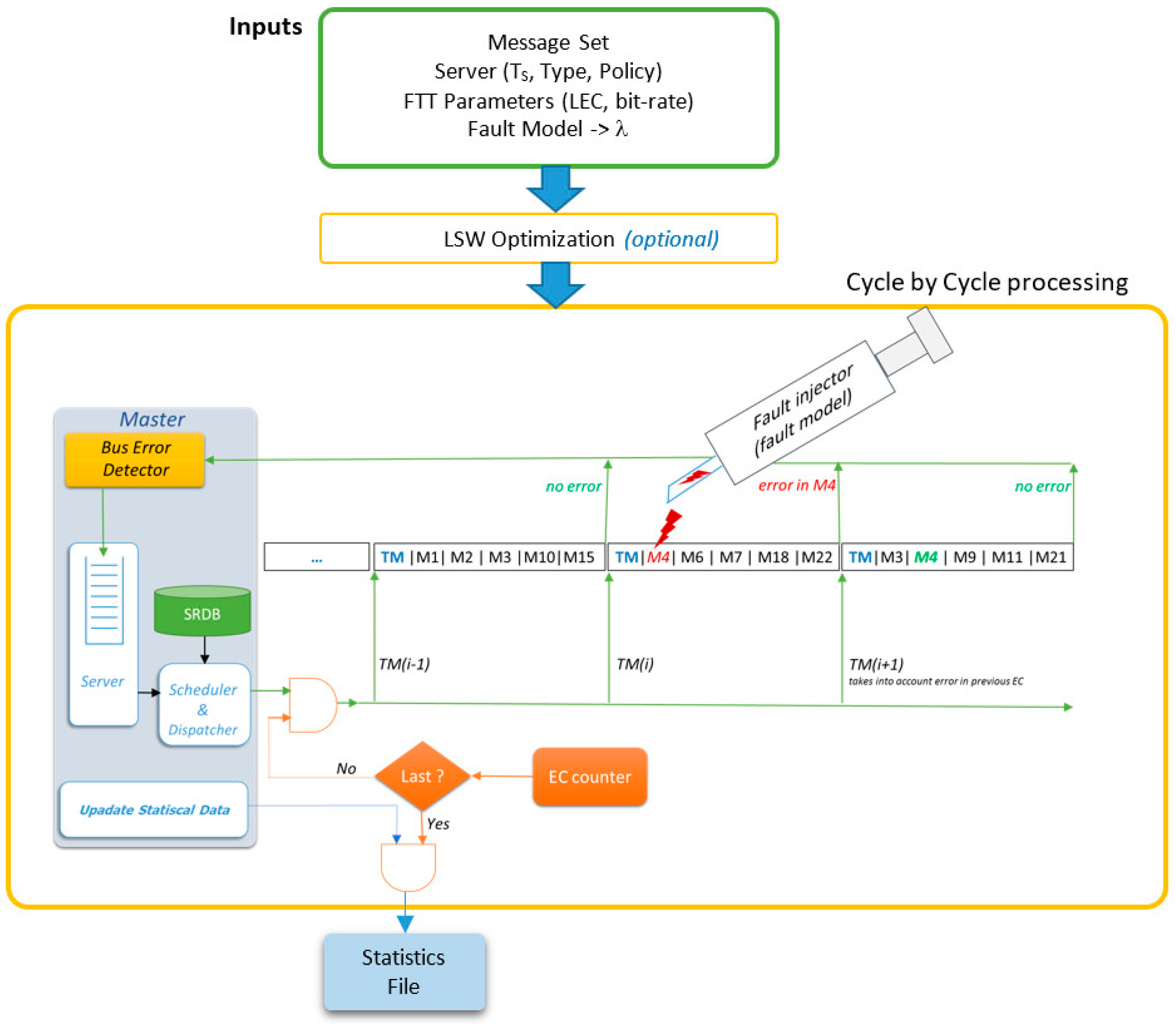
In FTT-CAN networks, the Master node is responsible for all the scheduling decisions concerning the TT traffic. Moreover, CAN is a broadcast bus, thus all of the nodes are potential listeners of all messages. The combination of these two characteristics enables the deployment of a simple but effective error detection mechanism. The Master is configured in promiscuous mode and, after sending the TM, listens to the bus, identifying the messages actually transmitted, as shown in
Figure 3.
The “Bus Error Detector” block compares the list of scheduled messages with the messages received in that EC, thus identifying eventual errors and omissions. The IDs of such messages are then put in the “Error Server Queue”. At the end of the EC the Master schedules the traffic for the next EC, when considering both the active TT messages and the messages affected by errors, contained in the “Error Server Queue”, as shown in
Figure 3. Any server policy can be used to manage the error queue, provided that it is compatible with the traffic scheduler. In the remainder of this section, we assume that the server has maximum priority, to maximize responsiveness to errors, and that it has enough capacity to accommodate all the retransmission requests with a desired probability. Server design is addressed in the end of the section.
In FTT-CAN, message’s periods and deadlines are expressed as integer multiples of LEC. As such, LEC is obtained by calculating the Greatest Common Divisor of these message attributes. However, as the rescheduling mechanism herein proposed implies that message retransmissions are possible, at best, in the EC that follows the error, LEC has to be halved when it matches the period or deadline of the fastest(s) message(s).
4.2. The Need for Multiple Replicas
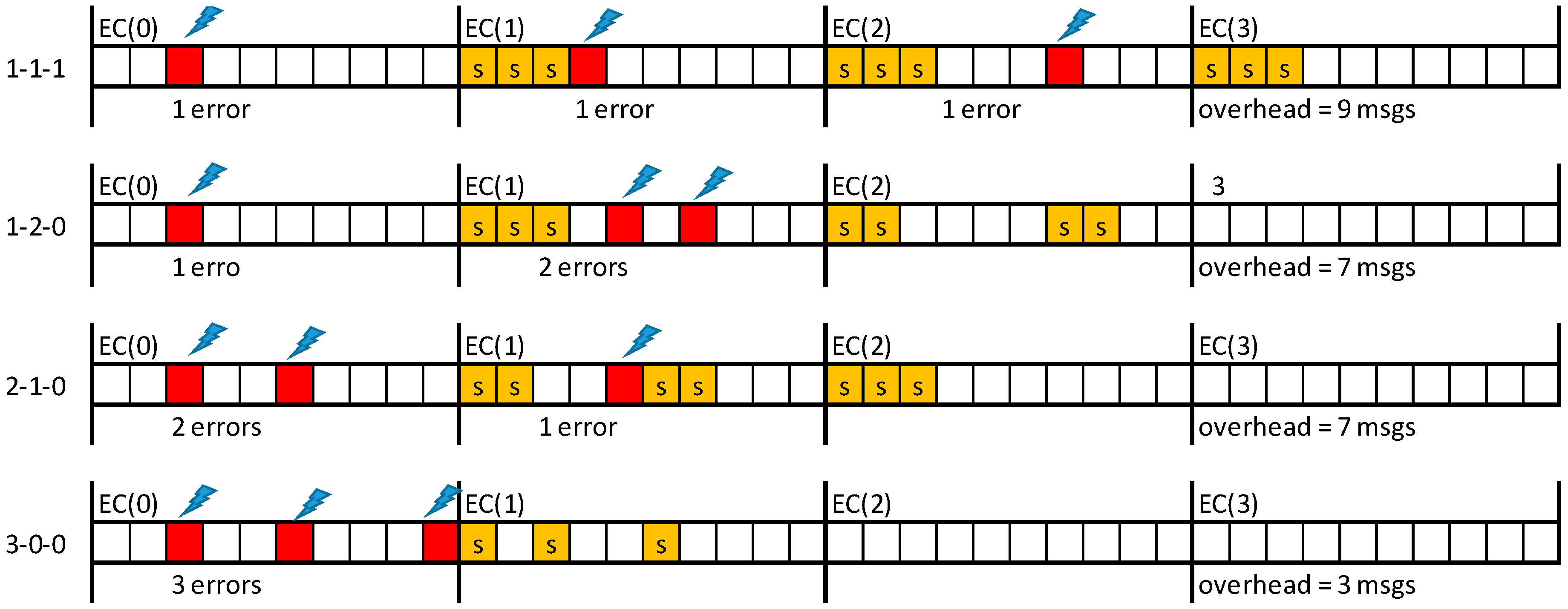
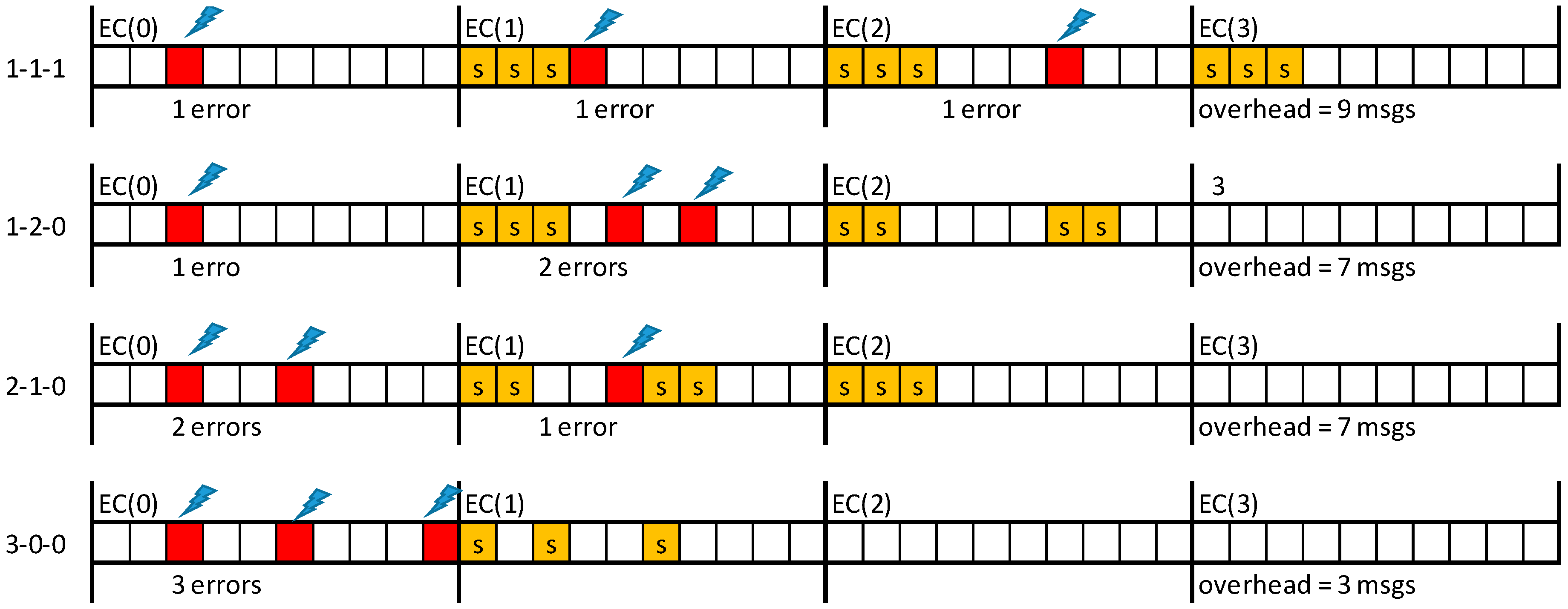
Errors may affect equally messages and their replicas and may occur more than once per EC. Therefore, assuring (probabilistically) the delivery of messages with short deadlines may require re-scheduling several replicas for the same EC, as illustrated in
Figure 4, where S stands for the error-server execution (notice that the error recovery would fail if single replica was used by the server).
As fault arrivals are modeled by a Poisson process, it is not possible to upper bound the number of faults in any given time interval. However, for a fixed time interval, as the number of faults increases, their probability of occurrence decreases. Therefore, it is possible to compute the number of replicas that guarantees successful and timely transmissions with a reliability goal ρ > 1 − εG, where εG is the maximum probability of failure or system/global unreliability level.
The system reliability level is specified in acceptable errors per mission, where a generally accepted mission time is one hour [
15], thus leading to a common metric of acceptable errors per hour. The system unreliability objective
εG can be converted to the error probability that each individual message may tolerate, when considering the messages periods and mission time, being this probability named
pεi. Equation (1) can be used and a good approximation of it is obtained using the first two terms of the Taylor series expansion, possible due to very small values of
pεi. The new formulation can be solved by upper bounding the
i terms, using the smallest value of
Ti and the biggest
pεi (worst GP value will be obtained). Afterwards making all
n elements equal to this bound and applying again Taylor series approximation, as previously, the limit probability
pεi can be obtained. These steps are depicted in Equations (6) and (7).
Equation (7) then defines an acceptable fail probability for a given message i, where Ti is the message period (in number of ECs), MT is the mission time and n is the number of messages subject to the recovery mechanism. This equation shows that the most demanding messages, i.e., with lower pεi, are those with smallest period. Since the error-handling mechanism is the same for all messages, design decisions will be made while considering the smallest pεi value, denoted as pε.
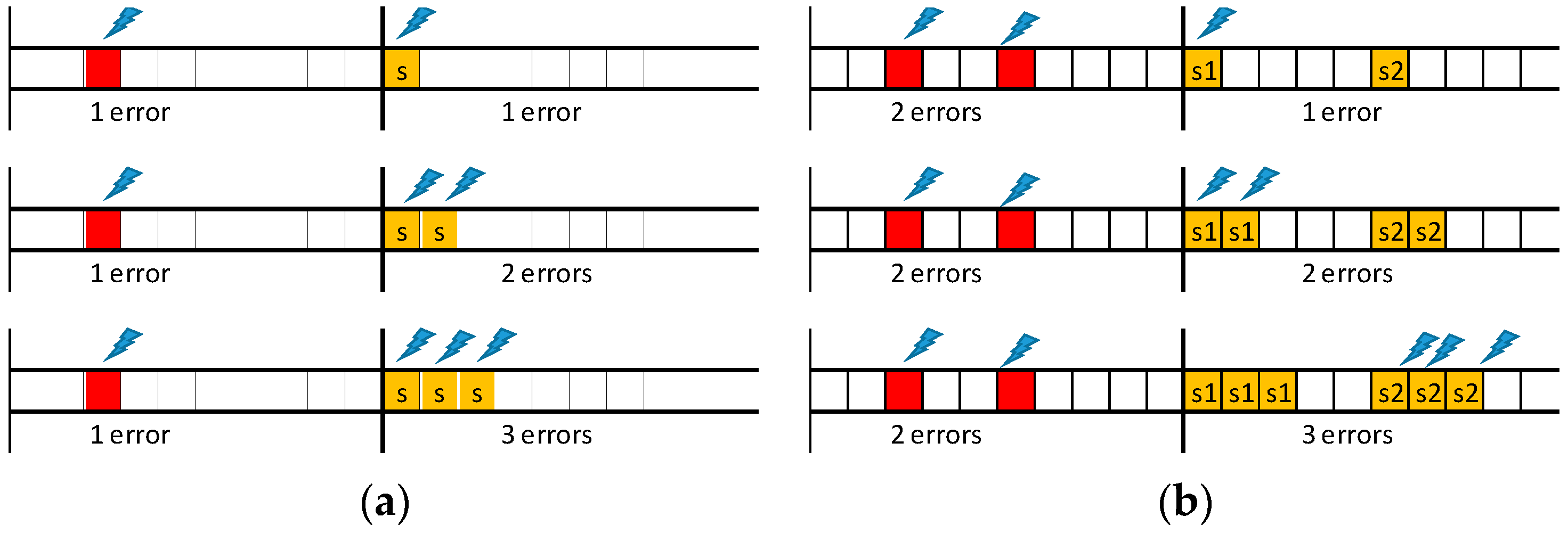
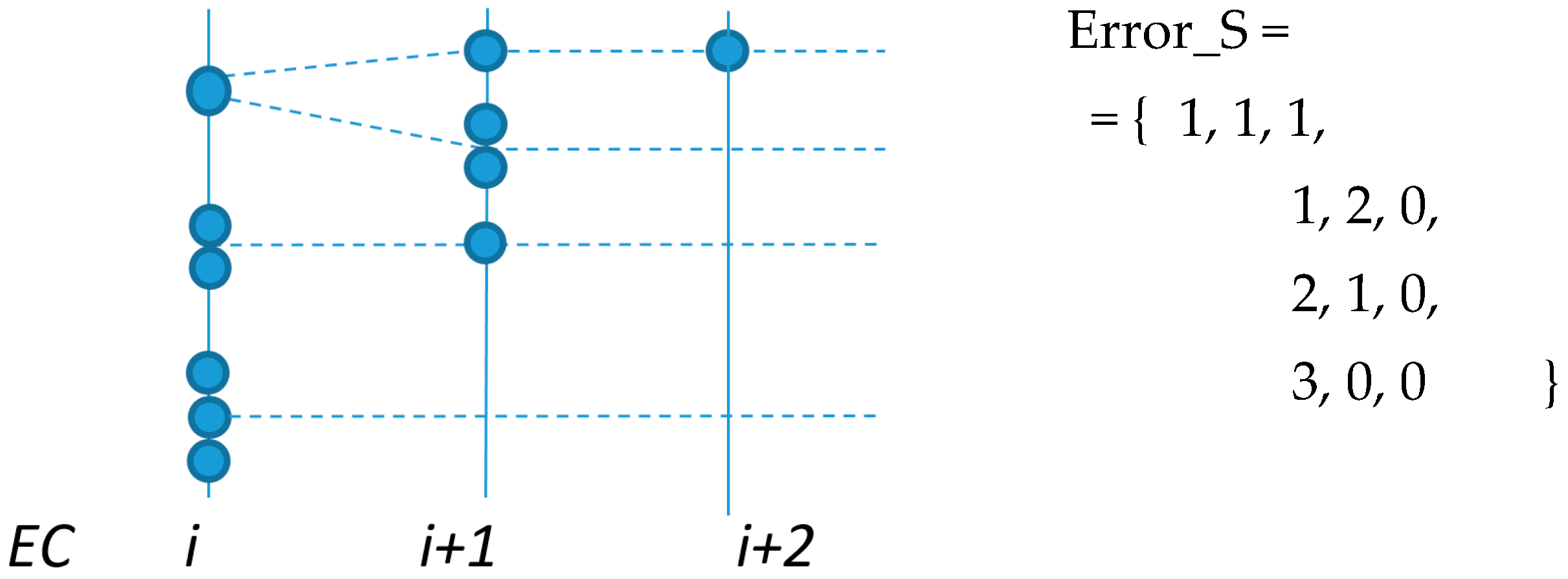
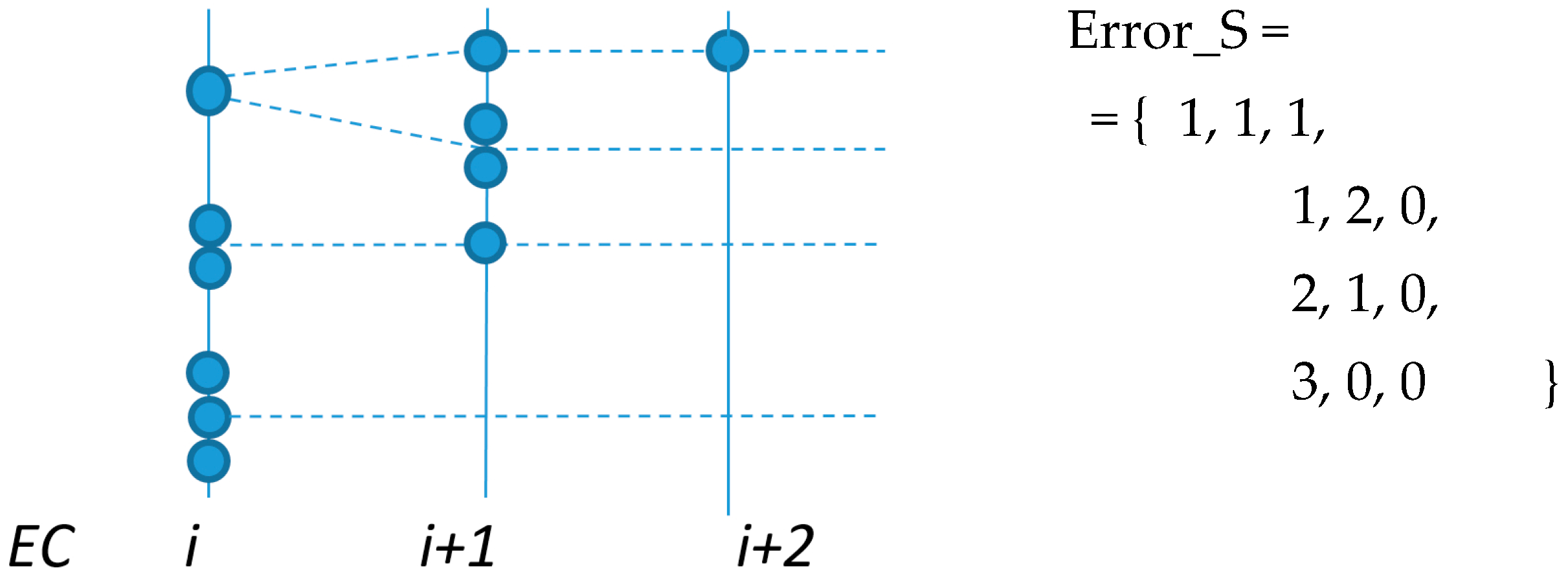
Figure 5 depicts a set of representative error scenarios that will be used to obtain a general expression for computing the number of replicas needed to attain a given system reliability level. In practice, the values of λ,
LSW and
pε limit the number of scenarios that must be considered.
Let us start with the “one error/one replica” scenario, shown on the top timeline of
Figure 5a. This event sequence occurs if one error affects a TT message, event with probability
Pλ(1; LSW), and the corresponding replica is also affected by an error, event with probability
Pλ(1; C
i). As errors are independent, the resulting probability (
p1/1) is given by the product of both probabilities. Therefore, the probability of this scenario is given by Equation (8), where message transmission times are upper bounded by
CMAX, to enable the derivation of generic equations. If the probability obtained via Equation (8) is lower than
pε, then a single replica is enough to guarantee the desired message transmission reliability level. Otherwise, an additional replica must be sent. This scenario is shown in the second timeline of
Figure 5a. This case is a simple extension of the previous one, in which we consider the combined probability of both replicas being hit by faults. The probability of occurrence of this scenario (
p1/2) is given by Equation (9). It is immediate to see that the probability for the scenario “one error/n replicas” (
p1/n_replicas), is given by Equation (10). The smallest number of replicas that makes Equation (10) lower than
pε is sufficient to attain the desired global reliability level for this scenario.
Since the error model allows for the occurrence of multiple errors in one EC we will now consider the scenarios in which two TT messages scheduled for the same EC are affected by errors (
Figure 5b). When considering first that a single replica per detected error is sent, if an error hits one of the replicas the recovery process fails. The probability of failure of the recovery process (
p2/1) is then simply obtained by adding the probabilities of both these combinations, each one with probability
Pλ(2;
LSW), probability of having two errors in the SW, times
Pλ(1;
CMAX), probability of one replica error, as expressed in Equation (11). Note that the scenario where both replicas are hit is also possible, but with much lower probability, so this contribution is not included in the equation. When considering now that two replicas per message are sent, a failure of the recovery process occurs only if both replicas of the same message are affected by errors, event with probability
p2/2, expressed in Equation (12). Iterating the reasoning it is possible to obtain Equation (13), which allows for computing the probability (
p2/n_replicas) of non-recovery for the “two errors/n replicas” scenario.
The same methodology can be applied to obtain the generic expression for scenarios with arbitrary number of errors and replicas, stated by Equation (14).
4.3. Server Capacity Computation
Message retransmissions require bus time, thus having impact on the response time of the remaining messages. Due to the unpredictable nature of errors’ occurrence, it is necessary to bound such interference, at least when message timeliness guarantees are a system requirement. We decided to use a server to manage the retransmissions because, in addition to this functionality, a server:
Is resource-efficient, since it consumes bandwidth only when activated, i.e., in the presence of errors;
allows controlling the reactivity to errors via its associated priority and budget/period;
is predictable and analyzable.
The analysis that follows allows computing the server capacity, extending the one presented in [
12], by taking into account the need for multiple retransmissions to achieve a desired reliability level, as discussed previously.
Equation (5) allows for computing the probability of having
k faults over any given time interval τ. It is however useful to use as system design metric the probability of non-recovery, in the server period, designated
pεS, which can be computed with Equation (15) for a Poisson process.
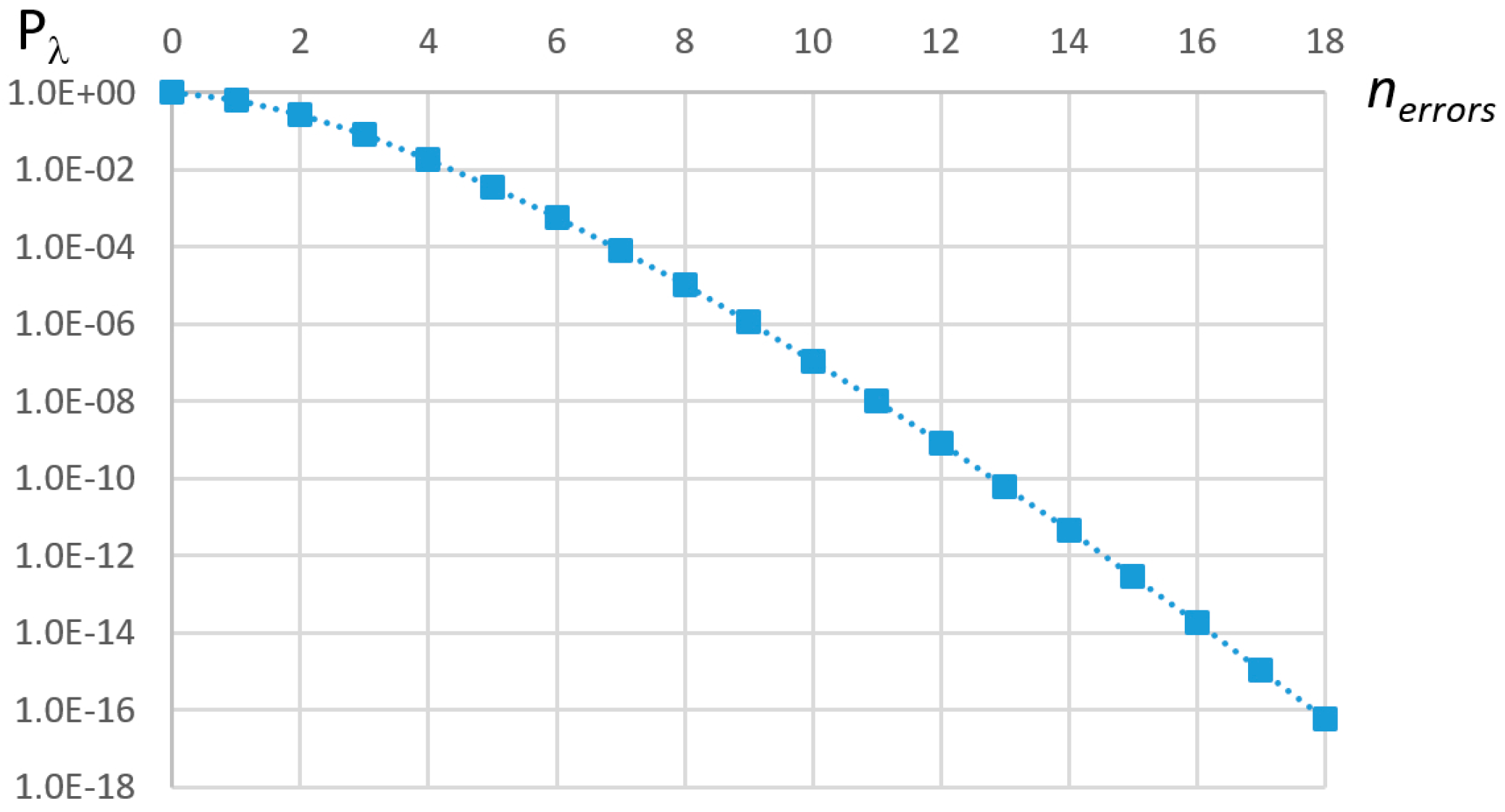
Pλ (≥n; τ) is plotted in
Figure 6 with τ = 1/λ and an Agressive environment. Based on this equation, it is possible to determine the number of errors that must be accommodated by the error-handling mechanism, and, from this, compute the minimum server capacity for its specified period
TS.
For example, considering one server period (
TS = τ), τ = 1/λ and a target of
pεS = 10
−10, the minimum value of
nerrors that satisfies Equation (15) is 13 (see
Figure 6).
TS was chosen heuristically, to match a mean expected number of errors of one. It was shown in [
12] that the server bandwidth increases as the server period decreases, so there is no advantage in attributing smaller values to
TS. Noting that it is not possible to foresee which messages will be affected by errors, the worst-case situation happens when all of them must be transmitted in the following EC, implying scheduling several replicas at once, as discussed previously. Assuming
z replicas per error, the server must then have a capacity equal to 13 ×
z maximum length messages. For instance, if the maximum replica level is equal to 3 (i.e., 3 replicas allow attaining the desired reliability) and LEC is equal to 2.5 ms, then the recovery mechanism uses 0.14% of the system bandwidth (
CMAX = 135 μs and
TS = 1/λ = 3.85 s), in the worst case, which represents a negligible fraction of the available bandwidth. Nevertheless, as we will see in the following section, the interference caused by the server execution on the scheduling of the remaining messages is non-negligible, and must be accounted for in the schedulability analysis.
6. Results and Discussion
To test the methodology presented in the previous sections we used several benchmarks obtained from the literature. One is the
Updated_SAE [
32], a revised and updated version of the SAE Benchmark [
33], which takes into account new modules and functionalities present in 21st century cars. The SAE benchmark is a well-known reference, used in several projects and tools, for instance, in [
13,
34]. We have also used the
PSA benchmark [
35], and one for an electric prototype vehicle
VEIL [
36]. For the sake of completeness, in
Appendix B, the message sets of these three benchmarks are presented.
The Updated_SAE message set was used to obtain the individual WCRT of all the messages when considering the Aggressive environment, with λ = 0.26 errors per second. The CAN bit rate is 1 Mbps and LEC was set to 2.5 ms, corresponding to half of the period of the fastest messages, to allow time for their retransmission. If the message set is schedulable for this environment, it is also for the other ones, which have a lower λ, since the interference due to the server execution is lower.
Firstly, we compute LSW using Algorithm 5. The Algorithm 5 triggers the execution of the algorithms described in
Section 5 that produce values that are interesting to analyze. For instance, the maximum errors in one cycle (
max_1cycle) and the maximum consecutive cycles with single errors (
max_cycles) are both 4. In these conditions, Algorithm 1 returns
RepLevel = {3, 3, 2, 1}, so the interference pattern array is:
With the error server configured according to the description in
Section 4.3, with
TS = 1/λ seconds (1538 ECs), C
S equal to 12 × 3 ×
CMAX and
RepLevel, as presented in the previous paragraph, the minimum LSW value is equal to 55.1% of the LEC to schedule the message set, including the error server. This algorithm, implemented in MatLab and using a Pentium i7-2670QM computer with 6 GB of memory, took less than 1 second to complete, with 0.1% precision as stopping criterion.
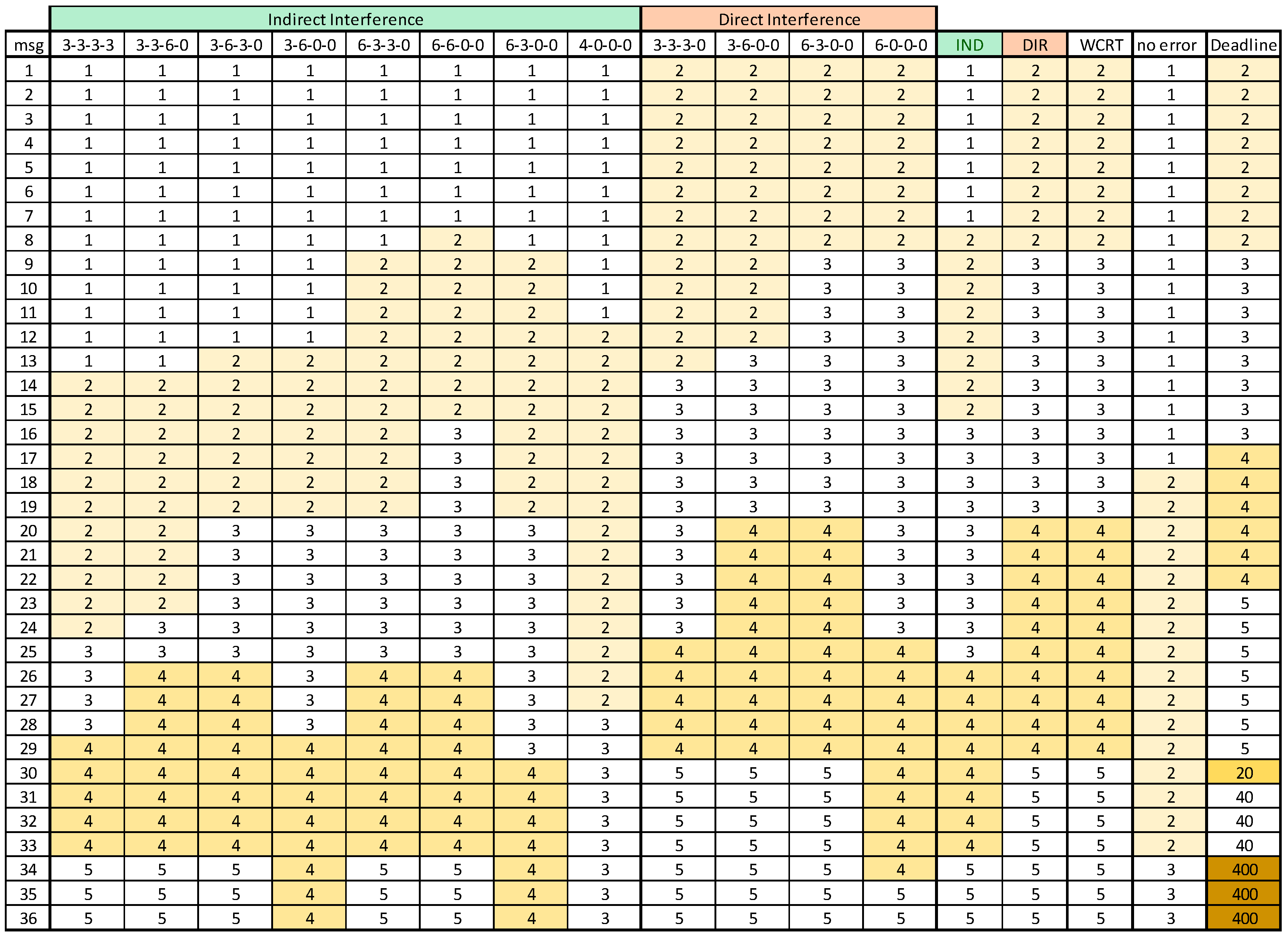
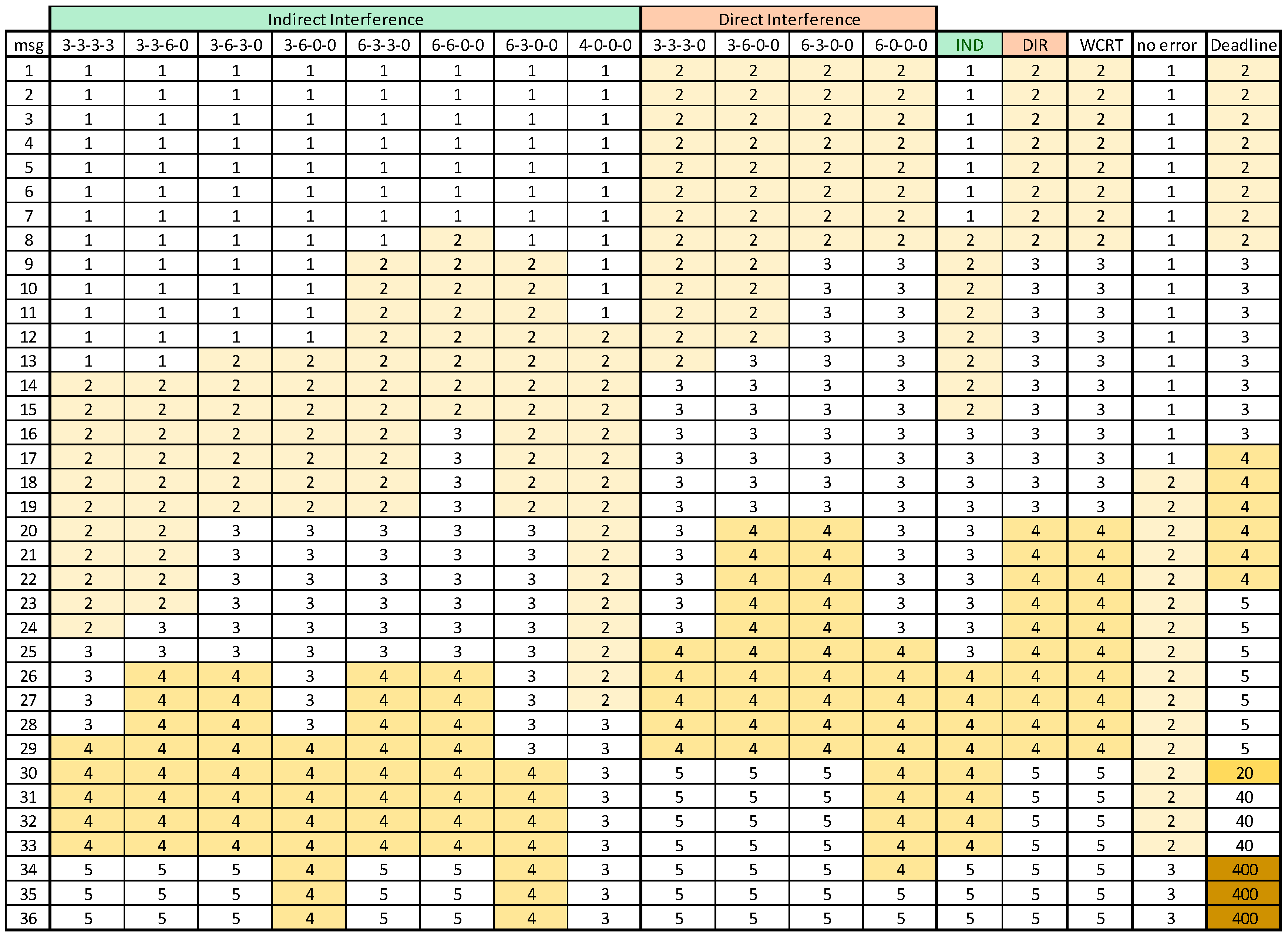
The diverse interference patterns and WCRT for each message are presented in
Figure 9, where the “0 errors” column is included for reference, presenting the response times in the absence of errors.
As expected, the results show a degradation of the WCRT in almost all messages, when compared with the no errors scenario. The first eight messages have a penalty of one EC, since they fit in the EC, in which they become ready, even when the server executes. The messages with lower priorities, e.g., 30 to 36, suffer a stronger response time penalty as they are affected by a higher interference level.
Figure 9 also confirms that Direct Interference normally dominates Indirect Interference. This is the case in our test scenario. However, even with the same message set but with
RepLevel equal to {4, 3, 2, 1} there were already cases in which Indirect Interference dominated. This confirms the need to always compute both kinds of interference to determine a safe upper bound to the WCRT.
6.1. Assessing the Design Method
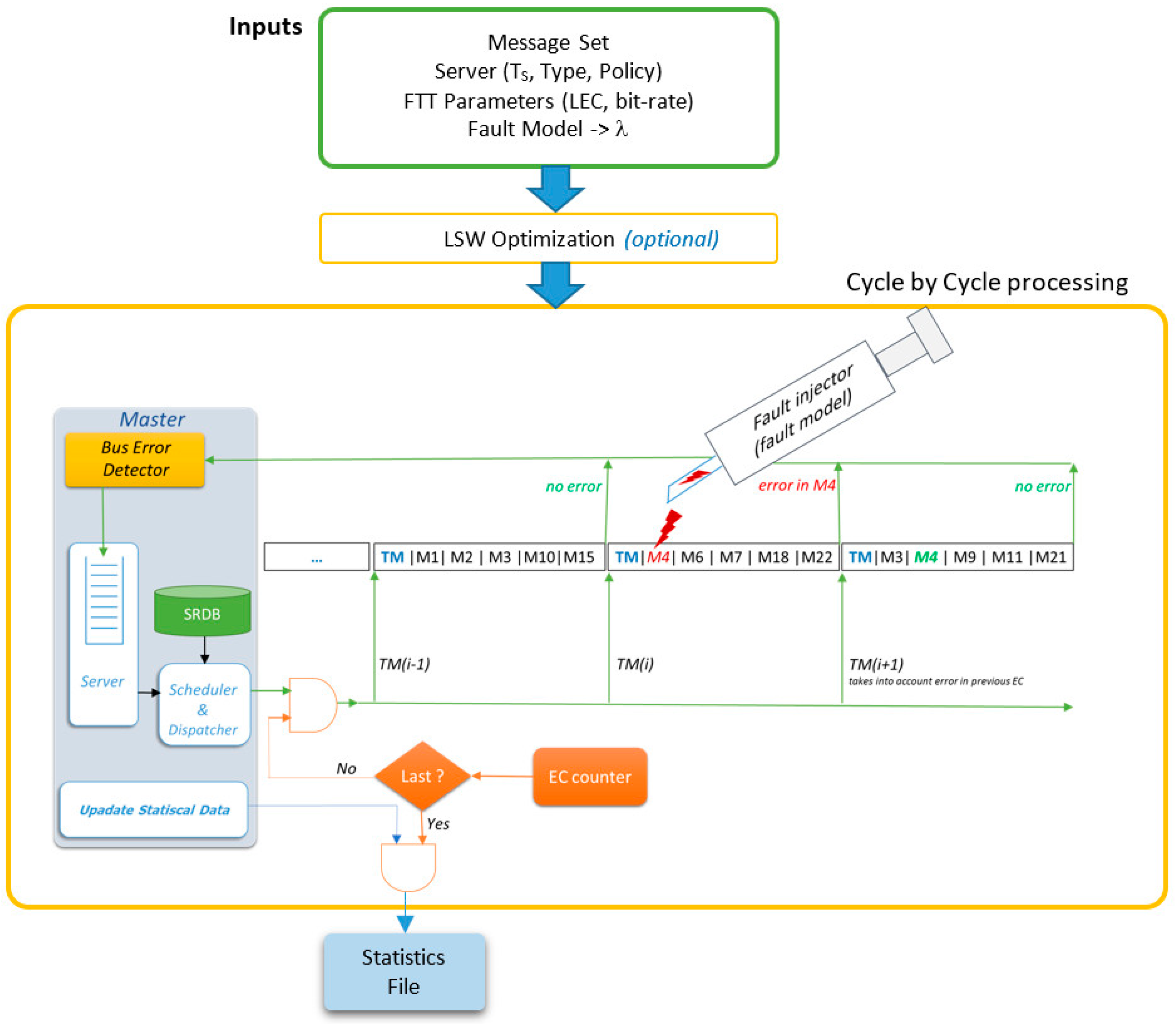
A MatLab simulator of FTT-CAN networks (
Figure 10), as previously presented in [
12], was extended to include a modified fault injector that follows the fault model described in this paper. The current version of the simulator includes the following new features:
LSW optimization using binary search;
server and scheduler functions now include the retransmission replication level; and,
injector and error detection engine now support multiple errors per EC.
Since the probability of finding two or more errors in consecutive cycles is very low (order of 10−7 even in aggressive environments with LSW equal to 2.5 ms), finding such situations in practice or even with simulated execution could take an impractical amount of time. For instance, when considering an aggressive environment, the error scenario 1-1-1-1 will, in average, occur once in every 48.6 thousand years of simulation time. Therefore, our simulator allows not only injecting faults following a Poisson process, but also injecting a full fault pattern chosen randomly from the predefined patterns that correspond to the identified rare scenarios. This allows for observing the impact of such rare random patterns injected in random positions of the message stream.
Using this approach, we simulated three message sets (Updated_SAE, PSA, and VEIL) for 14.4 million cycles of operation, corresponding to 10 h of system operation for the first set and 20 h of operation for the other two sets. This test was repeated 20 times for all three sets without observing any missed deadline, thus with all errors recovered in time, as expected.
To assess the tightness of our design process, we compared the WCRT generated analytically with the maximum observed response-time in the simulations.
Table 4 presents this comparison for the
Updated_SAE message set, showing that the analytical WCRTs are tight for the messages with higher priority with the potential pessimism growing for the lower priority messages. Nevertheless, note that the values obtained from simulation are not guaranteed to be the absolute maxima, due to the limited simulation time, thus some of the reported differences between computed and observed values may be smaller.
Another measure of the efficiency of our design method is the tightness of the minimum LSW needed to schedule the message sets. Thus, we compared the analytic value obtained from our design approach with the minimum value that we could obtain in simulation, reducing the LSW just until deadline misses started to occur.
Table 5 presents these values for the three benchmarks, showing that the analytical minimum value for LSW was roughly between 12% and 16% larger than the one obtained in simulation. Again, note that these differences can be upper bounds to the real differences since there is no guarantee that the simulation captured all of the actual worst-case situations.
Table 5 also shows the minimum LSW needed to schedule the messages sets without errors, showing the impact of error recovery. This impact is particularly large in an Aggressive environment, as considered here, to guarantee timely error recovery. In fact, the minimum LSW that is generated by our approach to account for the Aggressive error scenario is 235%, 208%, and 45% larger than the minimum LSW needed to schedule the corresponding message sets without errors, respectively,
VEIL,
PSA, and
Updated_SAE. One interesting observation is that the relative impact of the error recovery mechanism decreases when the message set bandwidth utilization grows. This is also visible in
Table 5.
Nevertheless, we must stress that, thanks to the dynamic scheduling feature, this extra bandwidth configured for the synchronous system is only used when errors do occur. So, the bandwidth effectively used by the recovery mechanism is not determined by the LSW value, but instead by the average features of the error model and corresponds to the error server bandwidth, which in this case is lower than 0.11% of the available bandwidth (
Table 5) e.g., the server for the
Updated_SAE message set has
TS = 1/λ and C
S = 12 × 3 ×
CMAX.
6.2. Comparison with Other Methods
The work in [
19] presented another error recovery method for FTT-CAN, based on the native CAN automatic retransmission of messages affected by errors (named
Automatic Retransmission in
Table 6). The mechanism reserves extra time in every SW for the recovery of eventual errors. However, this extra time is left unused in the absence of errors, and is thus less efficient than our proposal (named
Controlled Retransmission in
Table 6). For instance, when considering the fault model presented in this paper and an Aggressive environment, the
Updated_SAE benchmark message set with the
Automatic Retransmission mechanism would require space for four retransmissions in every EC. This represents a constant bandwidth of 25.2% (or 12.6% for the other message sets, which have LEC equal to 5 ms). Conversely, our
Controlled Retransmission mechanism consumes an average bandwidth that is less than the bandwidth of the error server (thirty six maximum messages (3 × 12) in the server period, configured, as described earlier with
TS = 1/λ), which is only 0.108% in this case.
The method presented by Tanasa et al. [
15] implies the use of a fixed number of replicas per message period, and is applied in a TDMA fashion (named
Static TT in
Table 6). The number of replicas is found by applying Equation (1), for a defined mission reliability goal. For the three referred benchmarks and with a global reliability of 1–10
−9, we need to send always four copies of each message (more than 300% overhead accounting for error signaling). The three extra messages sent and their transmission time is always wasted when there are no errors (which is the most common scenario, for the considered BER). This happens because the scheduling is static and needs to cope with every error, without knowing when they will occur. Thus, enough message copies are sent to get a probabilistic assurance that the reliability goal is attained. This is clearly in opposition to our proposal where the bandwidth is only used when needed, i.e., when errors do occur. As shown in
Table 6, this method requires a minimum LSW similar to our method for the lightest set (
VEIL). However, for a set with medium bandwidth utilization (
PSA), our method already requires a minimum LSW that is 32.4% less than required by Tanasa’s method. For the set with higher utilization (
Updated_SAE) Tanasa’s method cannot even generate a schedulable solution. Comparing the bandwidth overhead of 15,1% and 29.5% for the two other sets (that corresponds always to more than 300% increase when referenced to each message set utilization bandwidth), with the reserved bandwidth of less than 0.11% used by our method is even more revealing.
Further, using the results available in the statistic files of the performed simulations (view
Section 6.1), the bandwidth that was used in the recovery process was also calculated. The average value found was very low, being 0.00047%, 0.00093%, and 0.0025% of the available bandwidth for the
VEIL, PSA, and
Updated_SAE benchmarks, respectively. These values are much lower than the bandwidth configuration server values of 0.105% and 0.108%, as the full server capacity was never used.
Nevertheless, our approach consists of detecting errors by the end of the EC and scheduling retransmissions in the following EC, which leads to an error recovery latency of one EC. Conversely, both the other methods allow error recovery in the EC in which they occur, thus being faster.
6.3. LSW Optimization with Random Sets and BW Required by the Error Recovery Mechanism
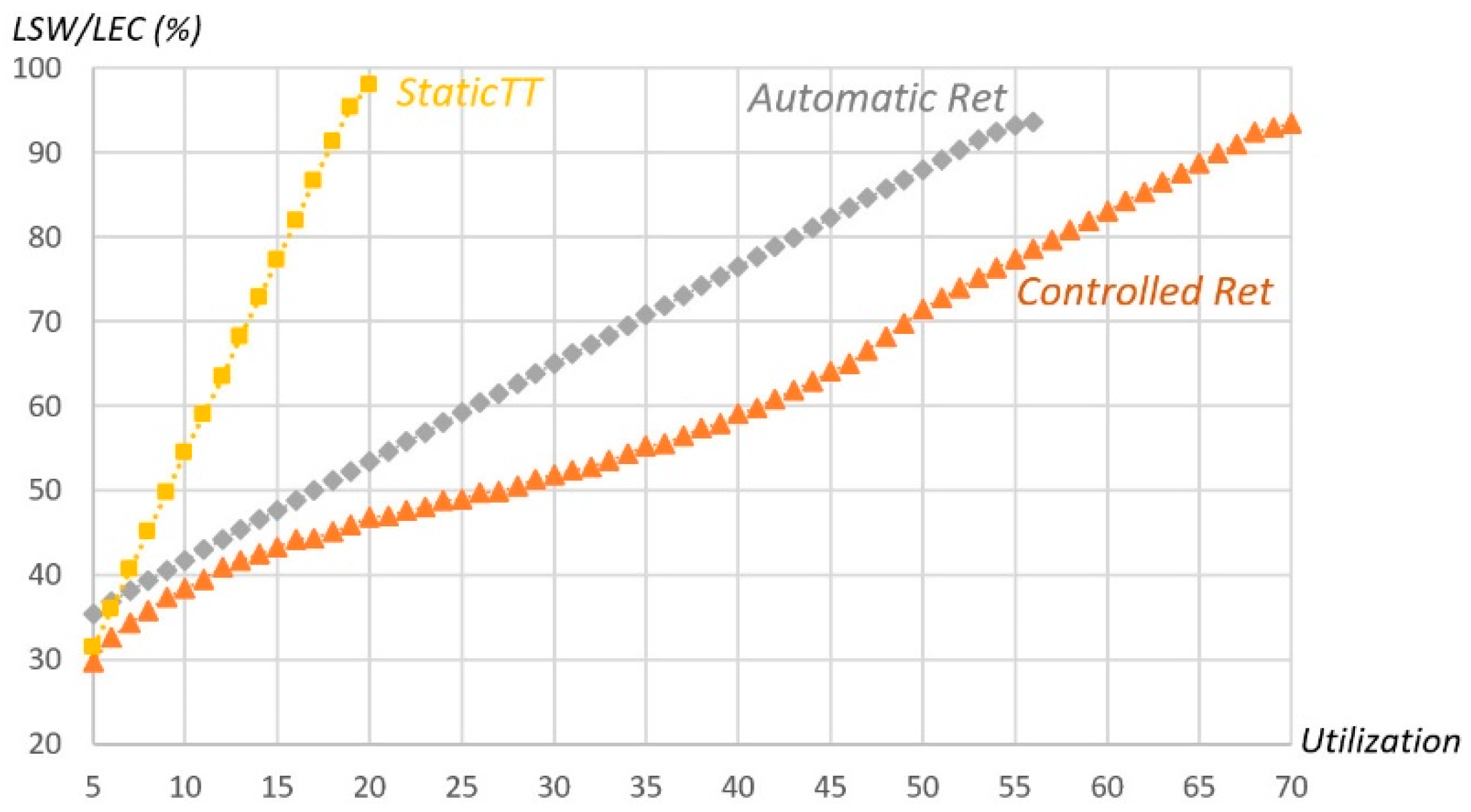
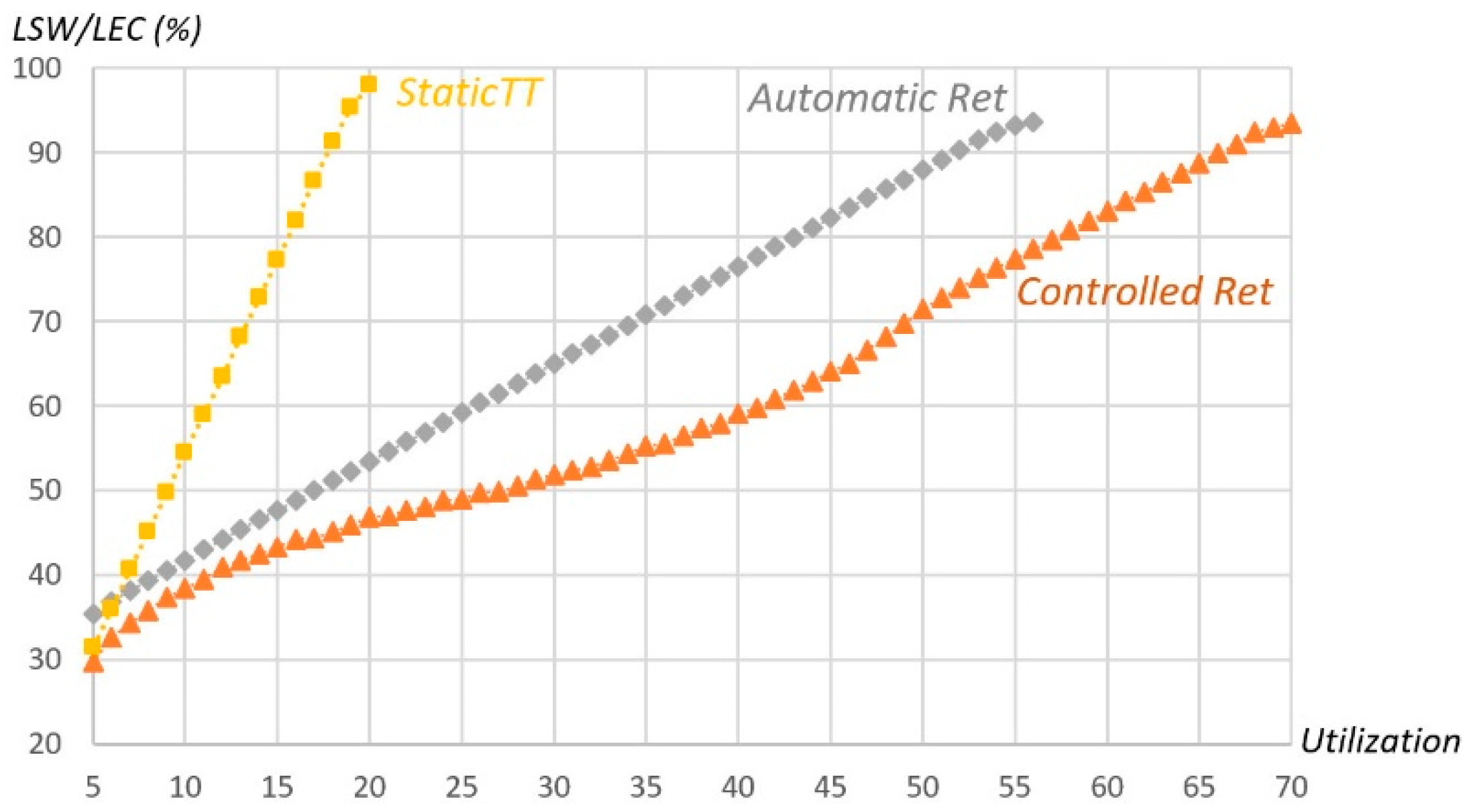
Multiple runs of the LSW optimization module were carried out to assess the performance of the three methods referred in the previous section, concerning the minimum LSW value required to attain the desired error responsivity, as a function of the message set utilization. The bandwidth utilization range varied between 5% and 70%, in steps of 1%. Message payload length varied from 1 to 8 bytes and message periods from 2 to 15 ECs, with implicit deadline (i.e., equal to period), both with uniform distribution. LEC was set to 2.5 ms and one thousand message sets were generated for each utilization value. The results are presented in
Figure 11, averaging the obtained minimum LSW of the 1000 sets of each utilization point.
Static TT shows a better performance than Automatic Retransmission (smaller minimum required LSW) but only for low utilization values (less than 8%). The Controlled Retransmission method always shows better performance than all of the other ones. When compared to Automatic Retransmission, it is slightly better for sets with utilization lower than 15% and grows for larger utilizations, requiring up to about 16% less in the LSW parameter. The picture also shows that our method allows for attaining much higher utilization levels than the competing ones, for the same reliability goal, allowing up to 70% utilization against 20% and 55% from Static TT and Automatic Retransmission, respectively.
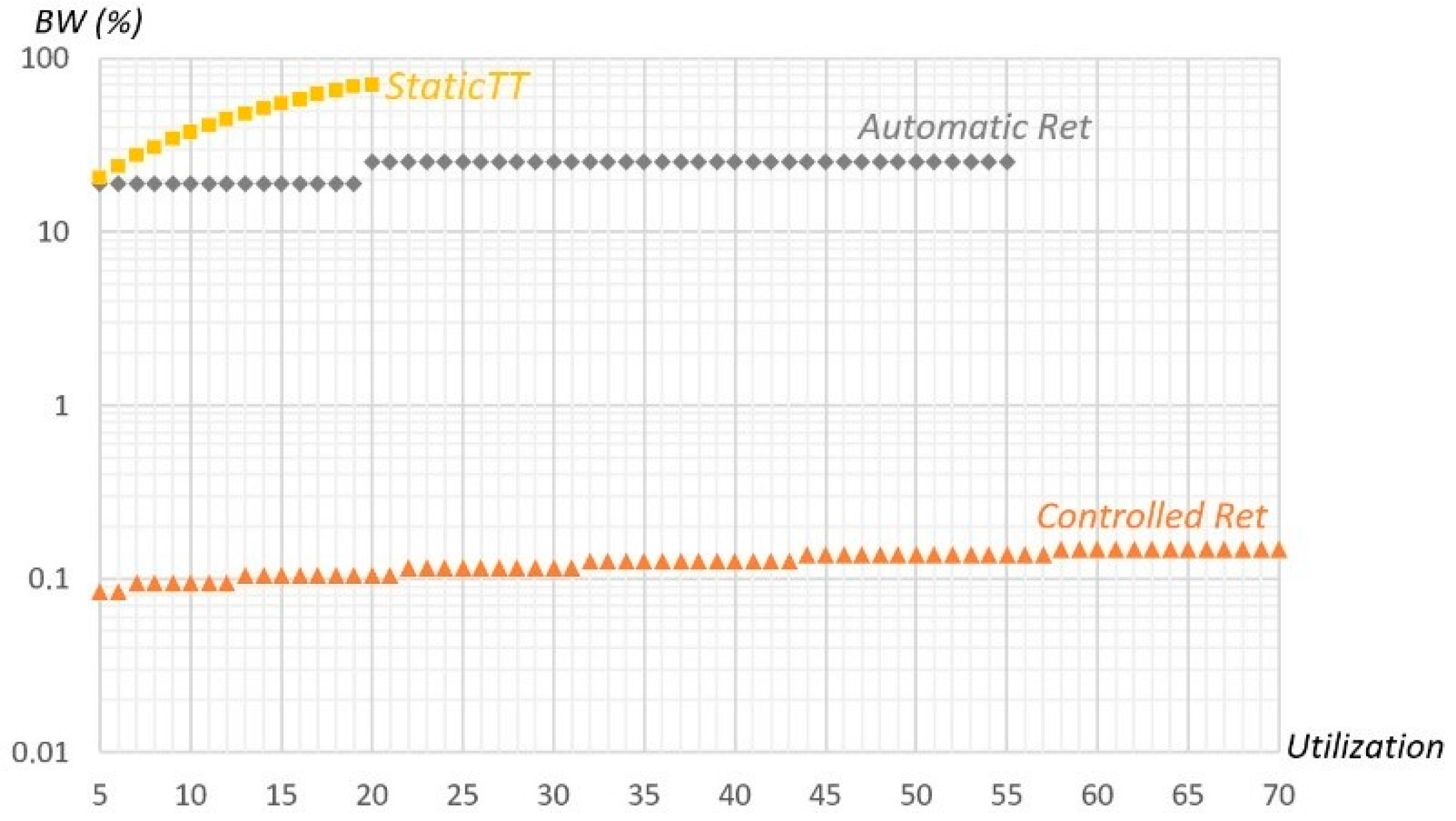
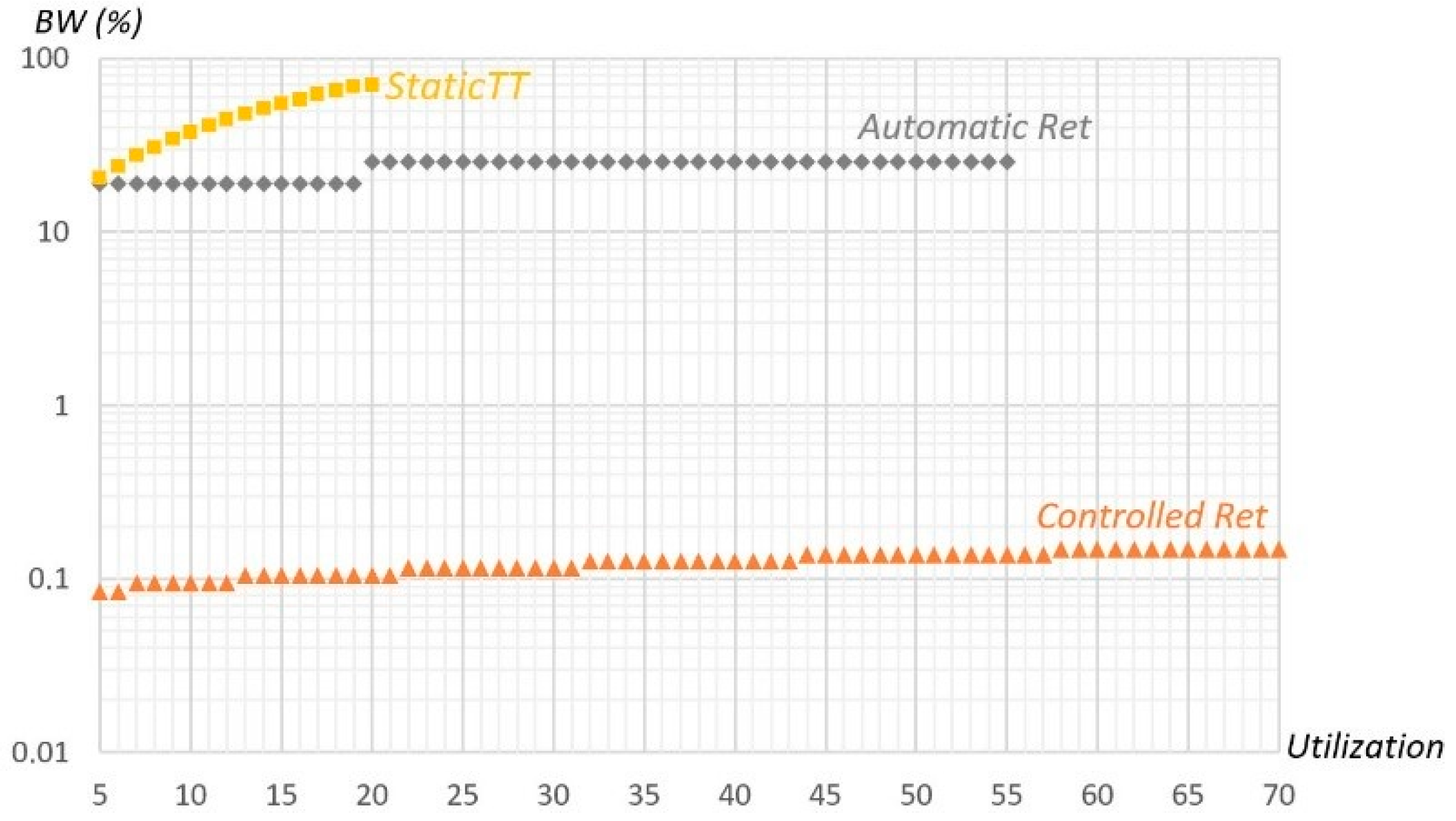
Figure 12 represents the bandwidth required by the different error recovery mechanisms as a function of the message set utilization, being obtained with random message sets using LEC equal to 2.5 ms, an Aggressive environment, and the other parameters as in the previous experiences. In
Static TT, the required bandwidth is proportional to the number of copies needed for each message, also including error signaling, being always more than 300% of the corresponding message utilization bandwidth, as four copies per message are required to attain the desired reliability level. Thus, more than 70% of the total bandwidth is allocated to the recovery mechanism, even for message sets with a utilization of only 20%.
Automatic Retransmission reserves slack time in each EC to recover the maximum number of errors considered (equal to
max_1cycle), which in the studied cases is 3 or 4, corresponding to 19.0% or 25.2% of the available bandwidth. Therefore, the overhead is essentially constant, having a step in the utilization transition from 19% to 20%, corresponding to the situation in which the errors that need to be handled changes from 3 to 4 per EC. As for the
Controlled Retransmission mechanism, the reserved bandwidth is the one of the error server. The server configuration depends on the fault arrival rate and maximum
RepLevel configuration value, and using
TS equal to 1/λ, the necessary capacity varies between 8 × 3 ×
CMAX and 14 × 3 ×
CMAX, which is only 0.084% and 0.147% of the 1 Mbps available bandwidth. This figure clearly shows the superiority of our method, since its required bandwidth is at least two orders of magnitude inferior to the other methods.
7. Implementation Issues and Extension
In our proposal, the achievement of high reliability imposes that the Master node must be capable of detecting all bus errors to reschedule messages affected by errors. Due to the error signaling mechanisms of CAN, this is true most of the times, but can fail in rare scenarios, causing Inconsistent Message Omission, as described by Rufino [
37], where some nodes receive correctly a message, while others do not. As in the synchronous window the native CAN’s automatic retransmission mechanism is disabled, the probability of encountering this scenario becomes significantly higher [
19], thus decreasing the global reliability level.
To solve this problem, a possible solution is to scan individually the last bits of the CAN frame (last bit of EOF and following three bits of the IFS field) and, if a dominant value is read there, the master node considers that an error, changing this way the CAN rule in interpreting these bit values. This new error detection mechanism can only fail if four errors hit these last four bits. When considering single bit errors, even in an aggressive environment, this scenario has a probability much lower than the 10−9 incidents per hour ultra-reliability number. This feature is relatively simple to implement using, for example, a small FPGA and it would have to reside in the Master node, only.
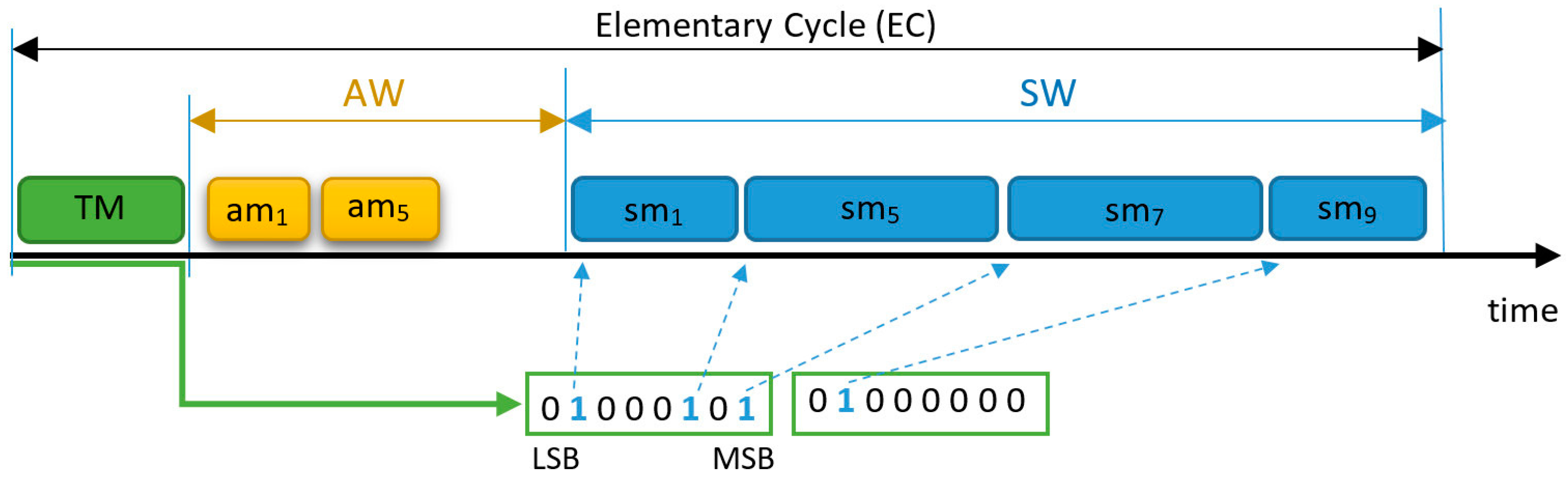
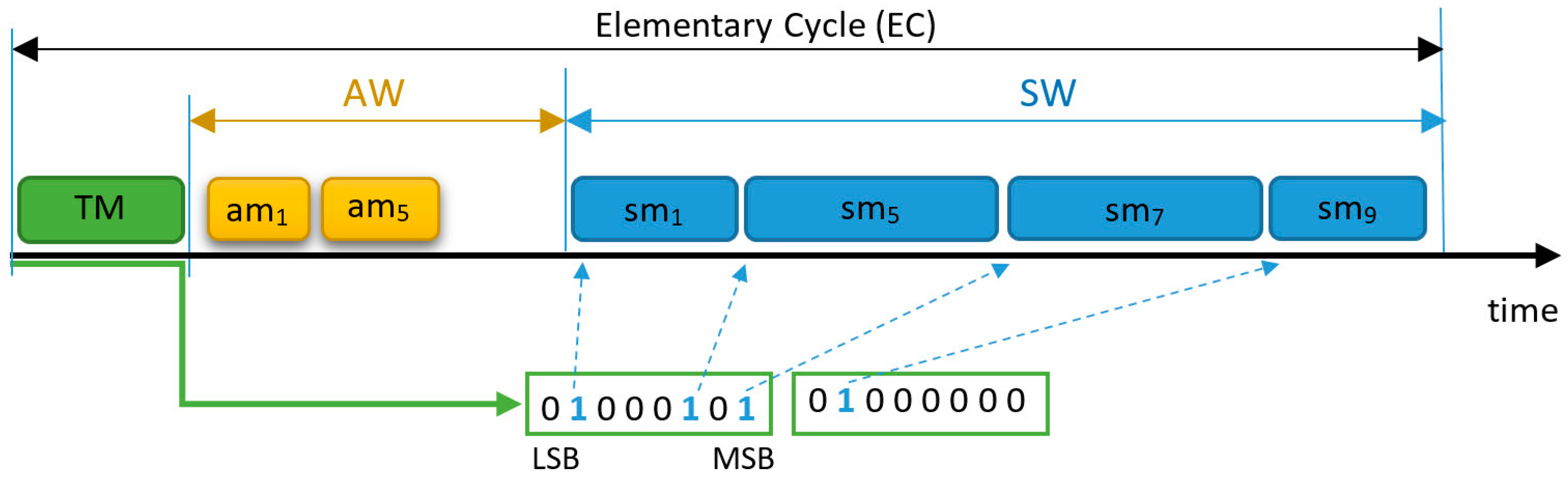
In the proposed mechanism, when an error occurs, the Master needs to request the transmission of multiple replicas. However, the protocol defines that the
TM message encodes the transmission request of each message in only one bit (see
Figure 1) and due to the limited payload of CAN messages (maximum of 8 bytes) there is not enough space in the
TM to add information on the number of replicas to transmit. Thus, the FTT-CAN protocol must be adapted to deal with this situation. We propose adding another message, called
TM_Ret, that is transmitted only in ECs in which there are replicated messages. The
TM_Ret payload is coded as follows:
1 byte per message to retransmit; and,
each byte is composed of two segments—2 bits to encode the number of replicas (00, 01, 10, 11 for two, three, four, or five replicas, respectively) and 6 bits to encode the message ID.
The use of TM_Ret with the referred transmission rules and coding scheme minimizes the extra traffic transmitted by the Master. This mechanism also has the advantage of being fully compatible with legacy nodes that do not transmit critical messages. To take advantage of the proposed error recovery mechanism, slave nodes have to adjust the FTT-CAN stack to receive and interpret the TM_Ret and act accordingly. Also, this message has an impact on the maximum LSW available and on the timeliness of aperiodic messages.
Finally, our mechanism is also compatible with the recent CAN-FD [
7] protocol that is increasingly gaining acceptance. In this case, since the payload can be longer, up to 64 bytes, the referred
TM_Ret is not needed and its information can be transmitted in additional bytes of a normal TM message, being this is a more bandwidth efficient approach.
8. Conclusions
In any real network, transmission errors are unavoidable and thus, a method to guarantee the delivery of messages, despite error occurrence, is necessary. This is especially true if a high reliability system is needed. In this paper, we presented a methodology to recover 1-bit errors in a simplex Controller Area Network (CAN or CAN-FD) running a time-triggered protocol. We showed that using on-line traffic scheduling plus a specifically designed server to handle retransmissions allows very large error recovery bandwidth savings while maintaining a high reactivity to errors, when compared with other error recovery approaches for time-triggered communication on CAN available in the literature. Conversely, the properties of our mechanism are closer to those of event-triggered CAN. However, the real-time guarantees in this case depend completely on the accuracy of the error model since the retransmissions are normally uncontrolled. Our solution explicitly controls retransmissions using a server, thus enforcing the properties of the considered error model. This is attained by including a run-time module that checks the arriving error patterns and limits the server execution to the patterns used in its configuration (see
Section 5.2). Thus, the impact on the system timeliness of errors occurring beyond the model is strictly bounded.
To implement our mechanism we used the FTT-CAN protocol, taking advantage of its on-line scheduling of the time-triggered traffic. We provided a detailed description of the proposed method, including the considered fault model, choice of server, and its parameterization and clear problem definition. We also identified the most demanding error scenarios and determined the level of replication needed to guarantee error recovery in the next FTT-CAN cycle. All of the methods were discussed in detail, including the corresponding algorithms.
We tested the proposed error recovery mechanism simulating several well-known benchmarks, as well as random message sets and we compared it with other methods available in the literature. We showed that the proposed method is effective in recovering errors in time-triggered messages using approximately two orders of magnitude less average bandwidth than other approaches, while the instantaneous bandwidth required by our method (average of the random sets) is also always lower than the one used by other methods, allowing for the application of the error recovery method to message sets with greater bandwidth utilization. On the other hand, our method can only recover errors in the following protocol cycle while other approaches can recover in the cycle in which the error occurred. This may force our mechanism to use shorter cycles to handle fast messages appropriately.
Currently, we are working to extend our approach to other than the Poisson single bit error model, so that we can accurately apply our method to situations with error bursts and periods of sustained higher interference. The optimization and reduction of the complexity in the schedulability and analysis techniques is another direction to pursue as future work.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}