Optimizing Waveform Maximum Determination for Specular Point Tracking in Airborne GNSS-R



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The GLORI Instrument, Dataset and Processing Chain
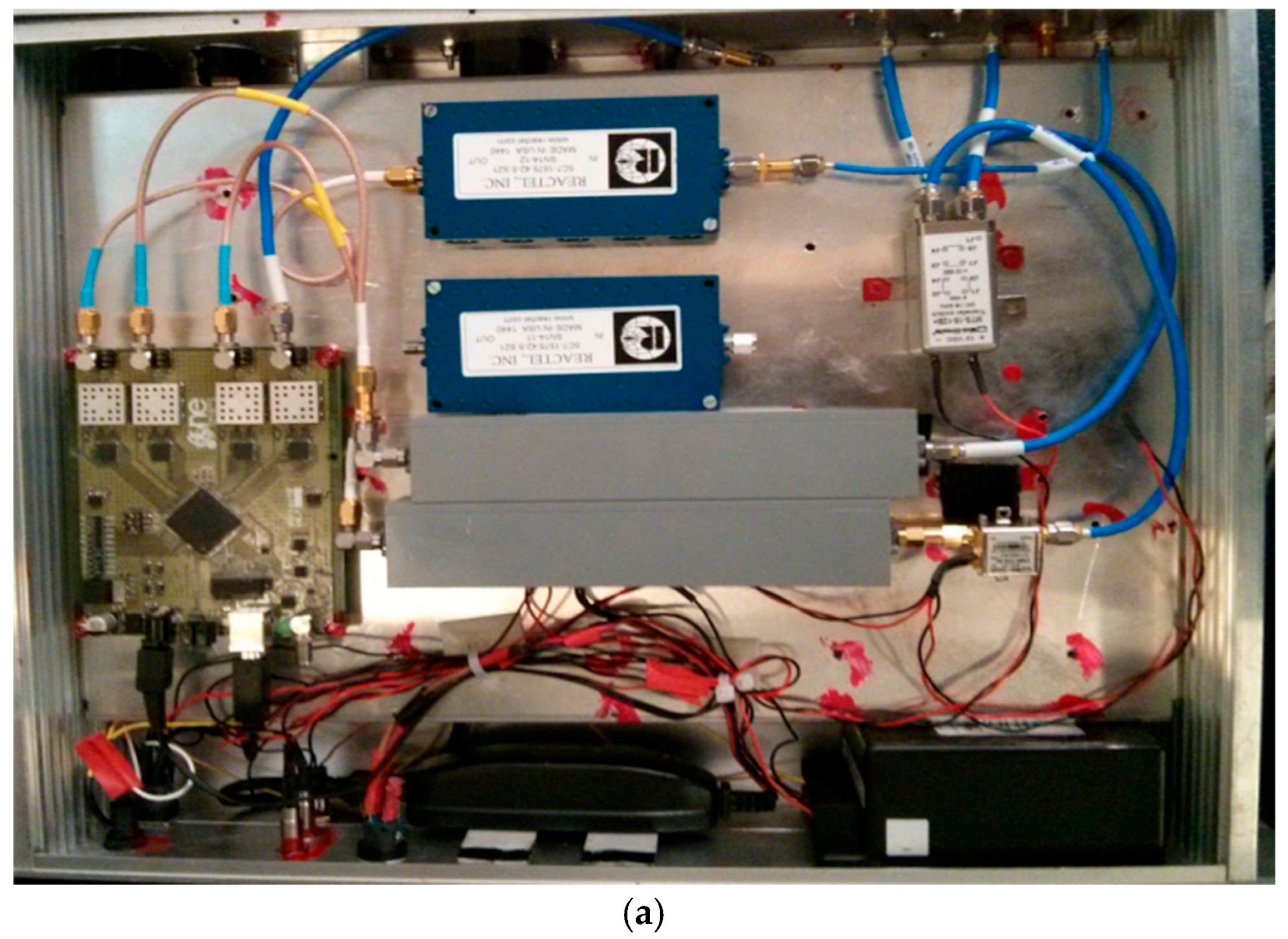
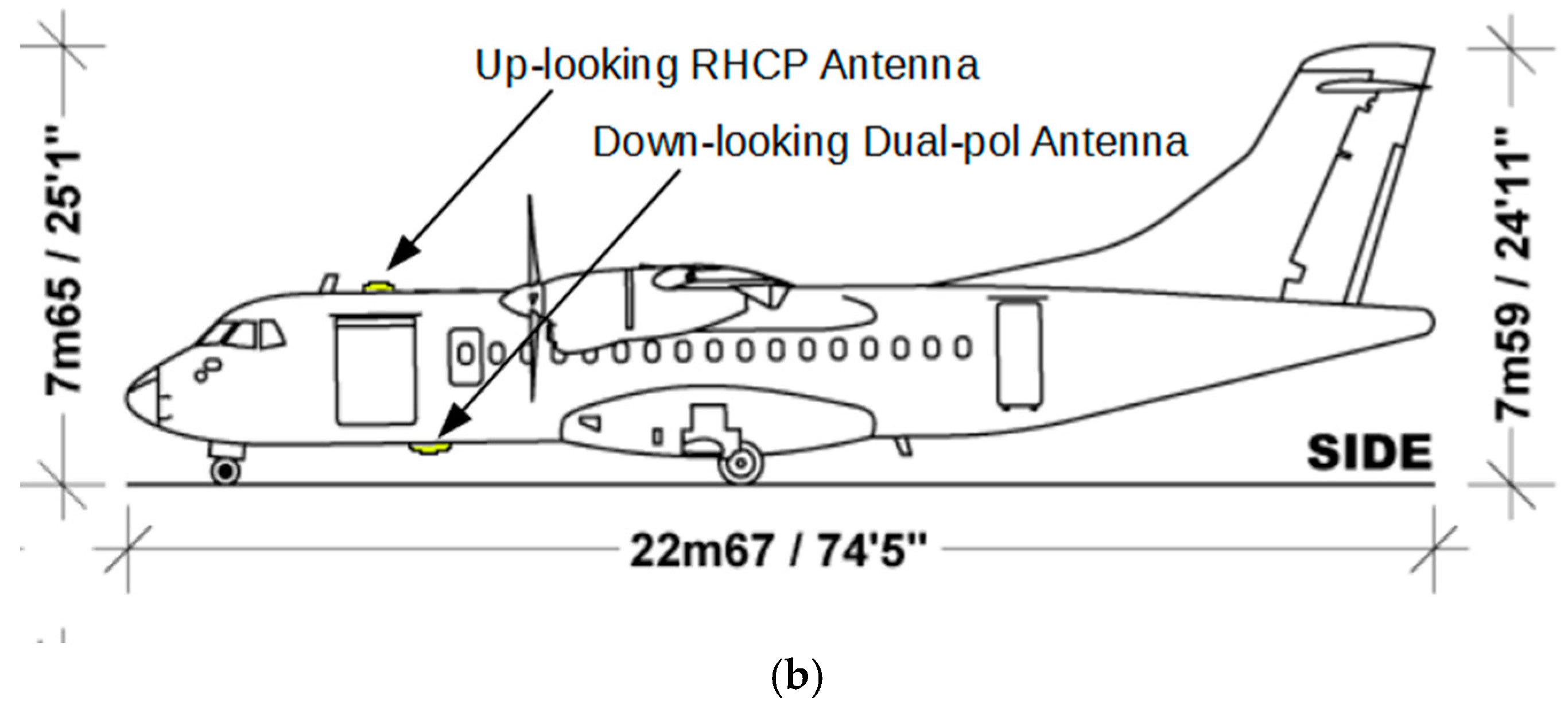
2.1. Instrument
2.2. Airborne Campaigns
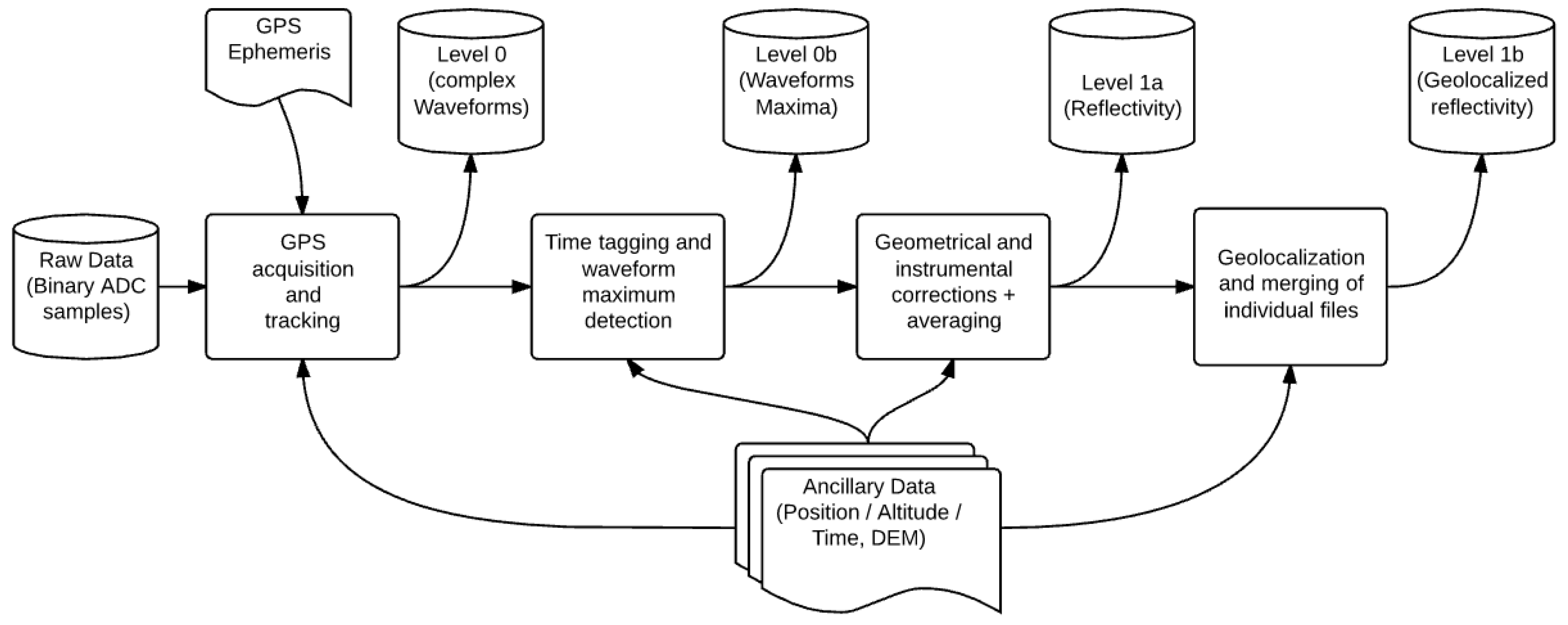
2.3. Processing Chain
- GNSS processing of raw datastream
- Acquisition and tracking of modulated signal to compute correlation waveforms
- Time tagging and extraction of waveform maxima
- Processing of the navigation message to get transmission time and extraction of the correlation power
- Instrument corrections and incoherent averaging
- Correction for antenna gain and instrumental noise, incoherent averaging and computation of reflectivity
- Geolocalisation and merging of individual files
- Computation of the footprint location and shape on the surface, merging of individual measurements in a consolidated file
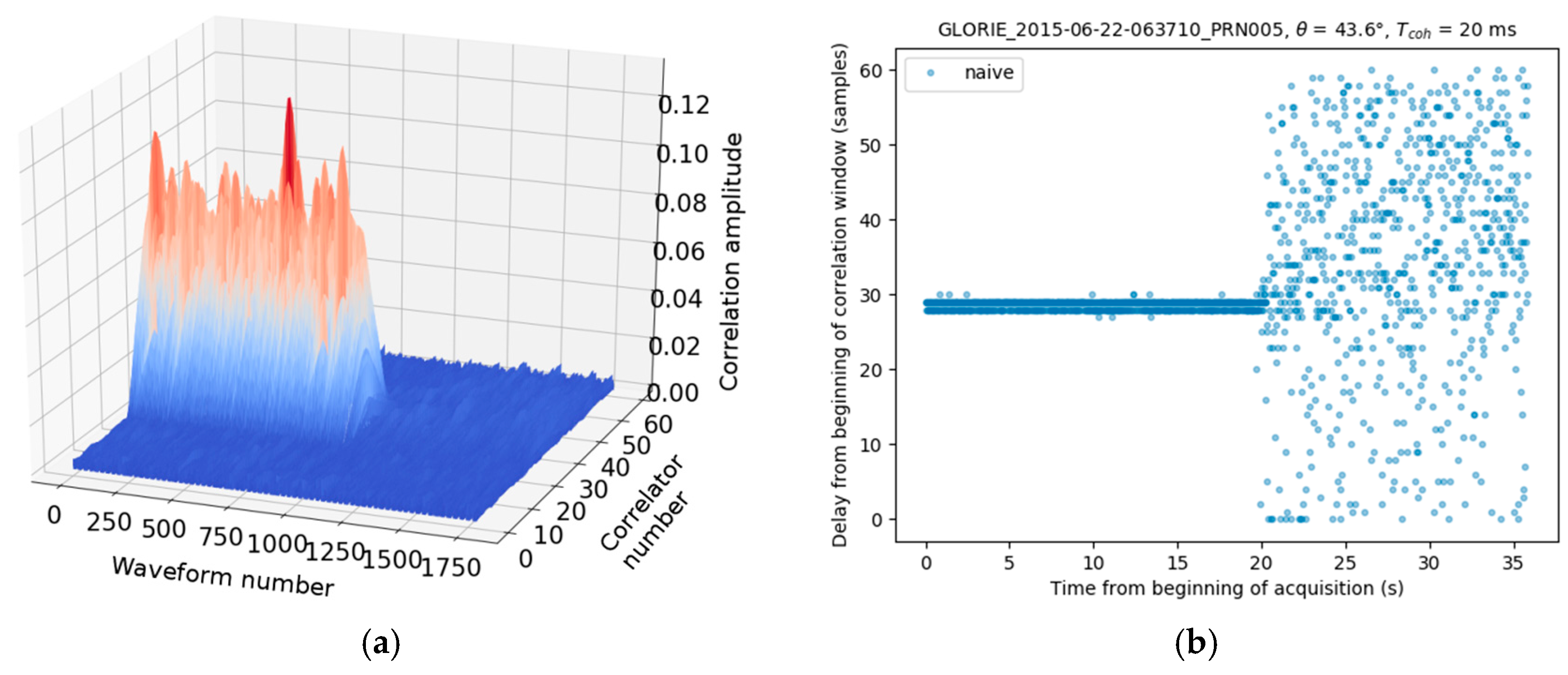
2.4. Focus on the Estimation of Waveform Maxima
3. Optimizing the Detection of Waveform Maxima
- Smoothing of the peak locations determined with the naive method (NS)
- Incoherent averaging used to improve the SNR (IA)
- Incoherent averaging and smoothing (IAS)
- Implementation of an algorithm using the above methods, in addition to adaptive filtering over the delay range, designed to mitigate the direct signal contributions (DM)
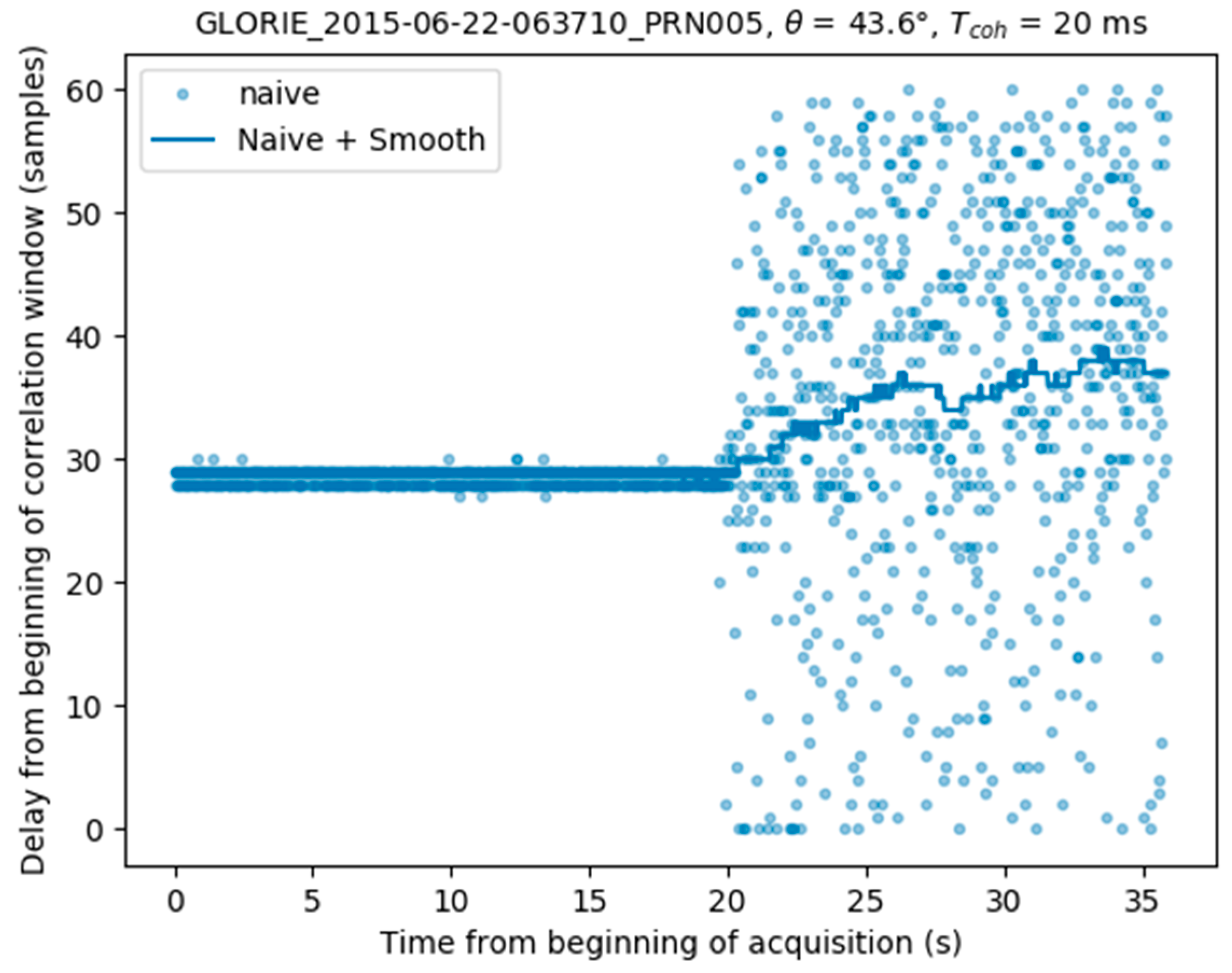
3.1. Smoothing with a Low-Pass Filter (NS)
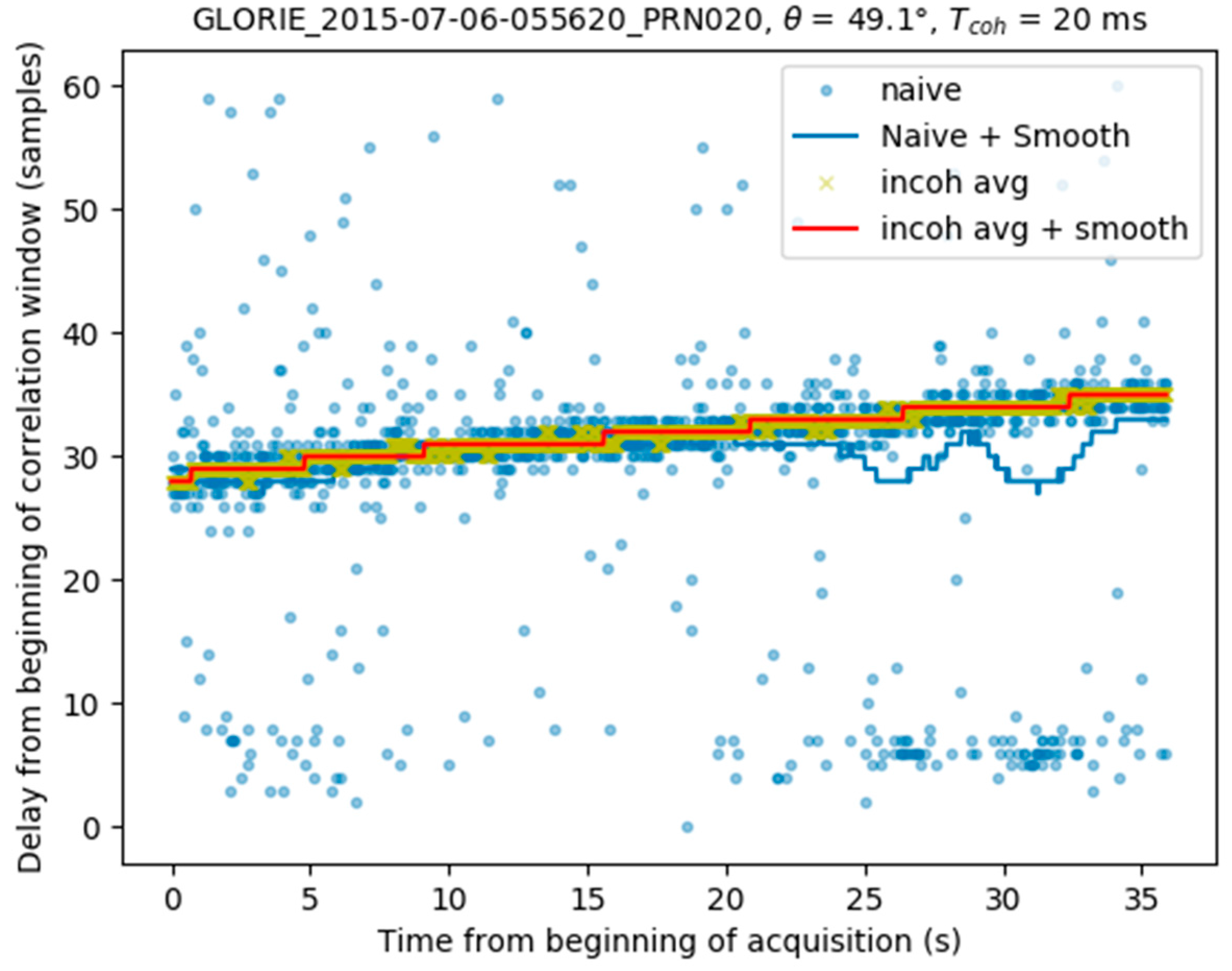
3.2. Incoherent Averaging (IA)
3.3. Incoherent Averaging and Smoothing (IAS)
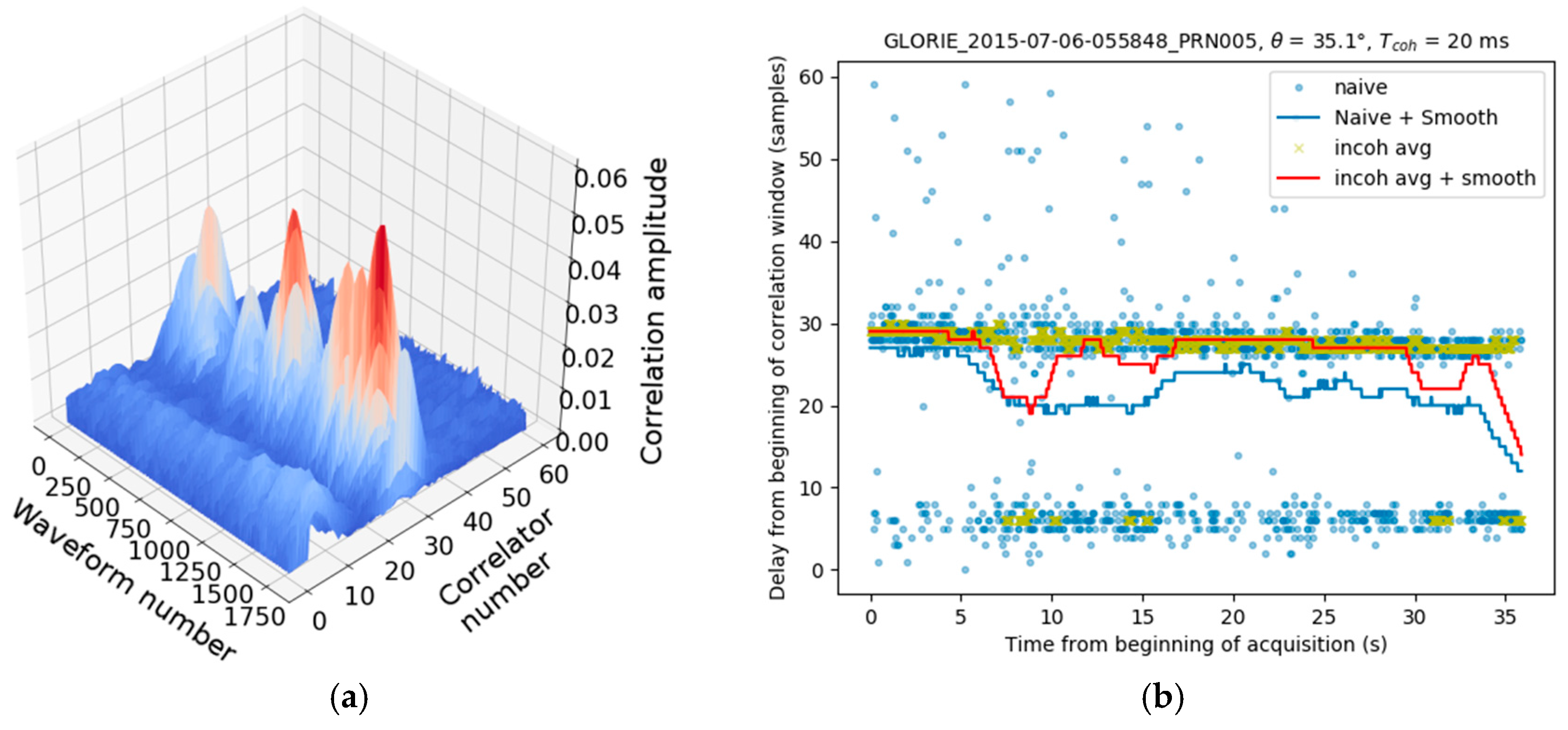
3.4. Direct Signal Mitigation Algorithm (DM)
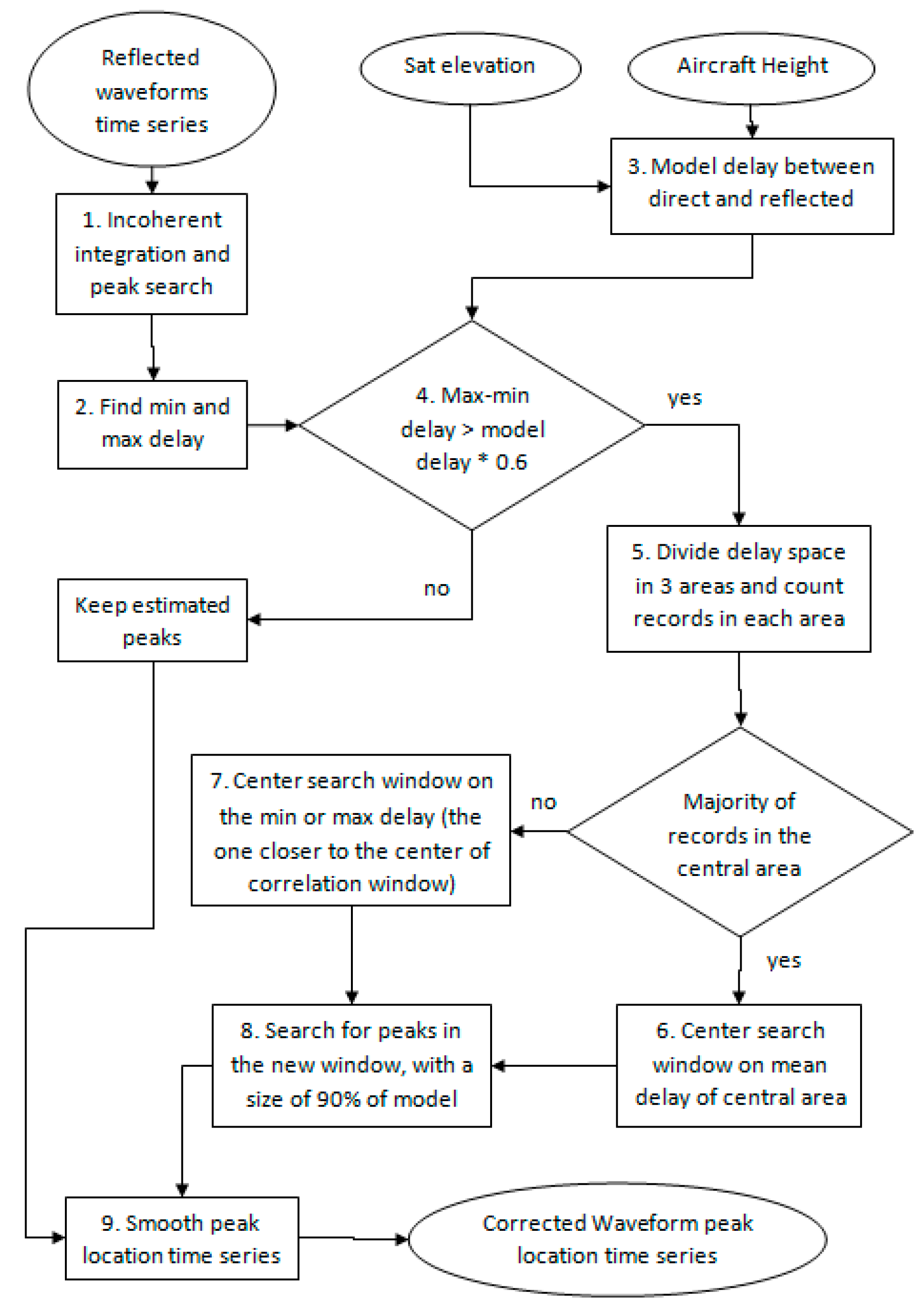
- Following incoherent averaging without smoothing, a first guess is used to estimate the position of the maxima . (Equation (4))
- The minimum and maximum values of the estimated delay are computed for the 36 seconds time series, together with their difference :
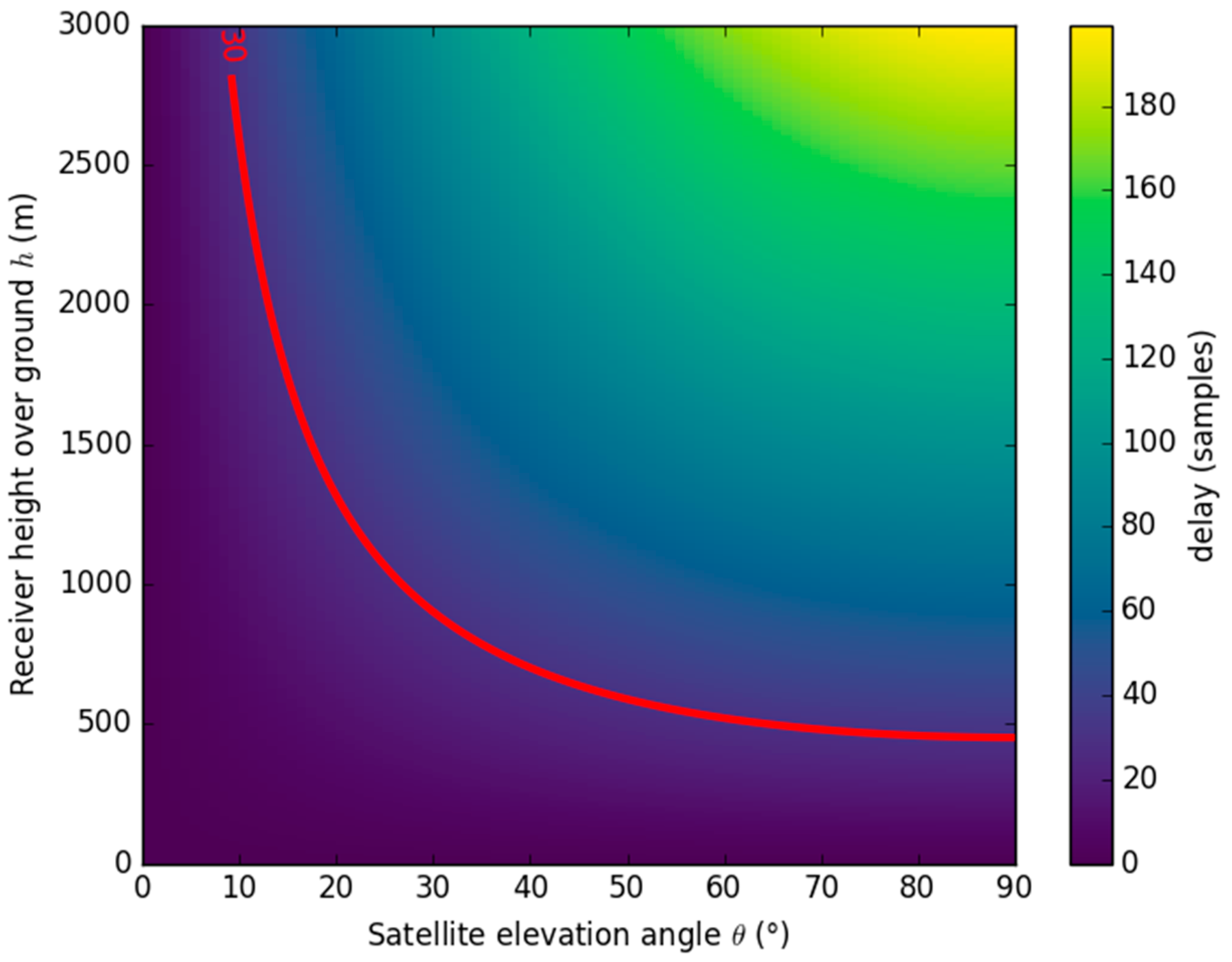
- The theoretical difference in delay between the direct and reflected signals is computed using (Equation (1))
- If , the first estimation of the peak location is retained, and no direct signal contamination is detected
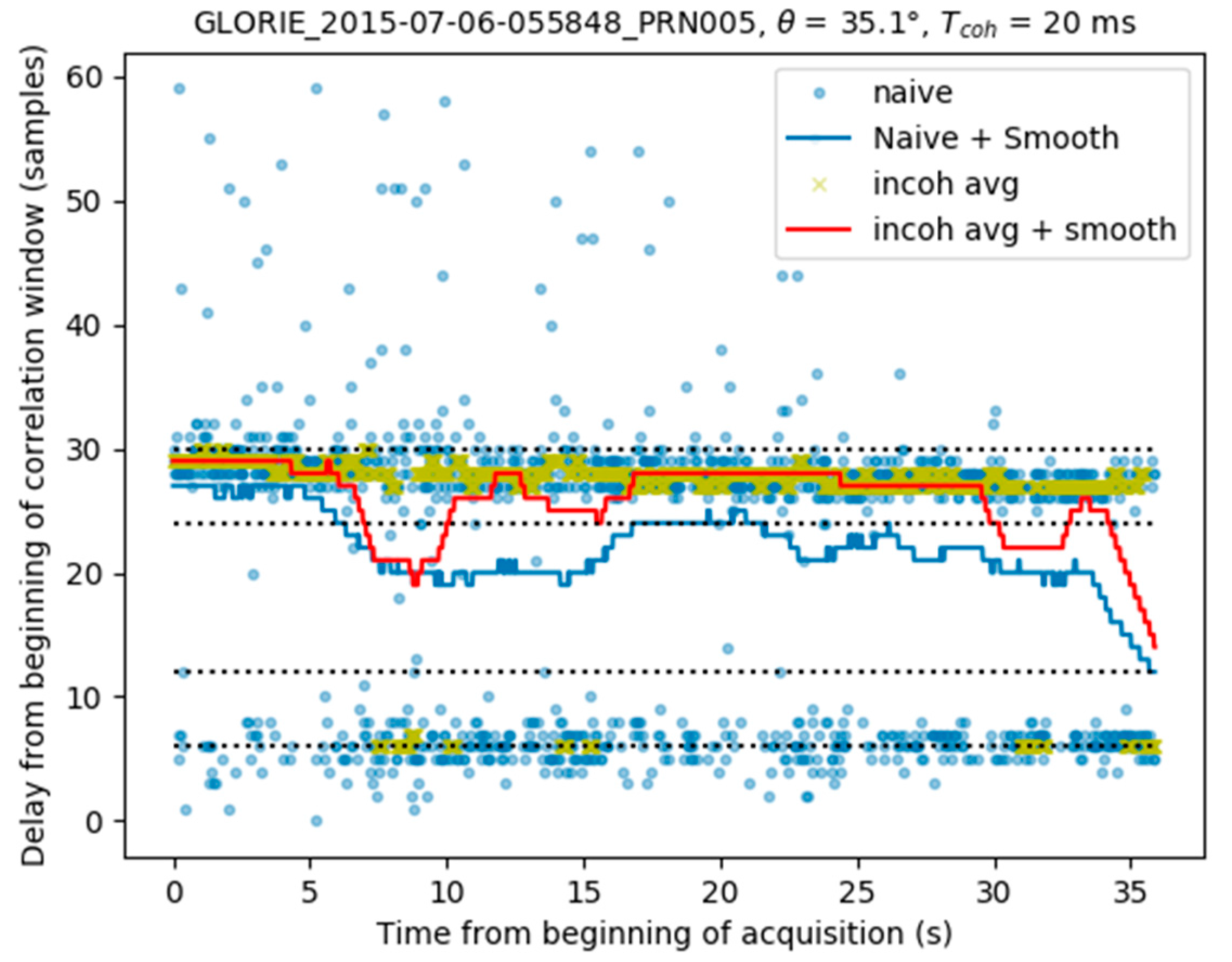
- Otherwise, the delay space is divided into three areas within the min-max delay range: 25% lower, 50% middle, 25% higher, in order to identify the location of most of the peaks (Figure 10)
- If most of the peaks are located in the central zone, no direct signal contamination is identified, and the variations in delay estimation are attributed to ambient noise. A new peak search window is then created, centered on the average location of those peaks situated in the central zone
- If most of the measurements are located in either the lower or higher delay window, the window having its mean value closest to the center of the correlation window (lag 31 in our case) is used as the new peak search window
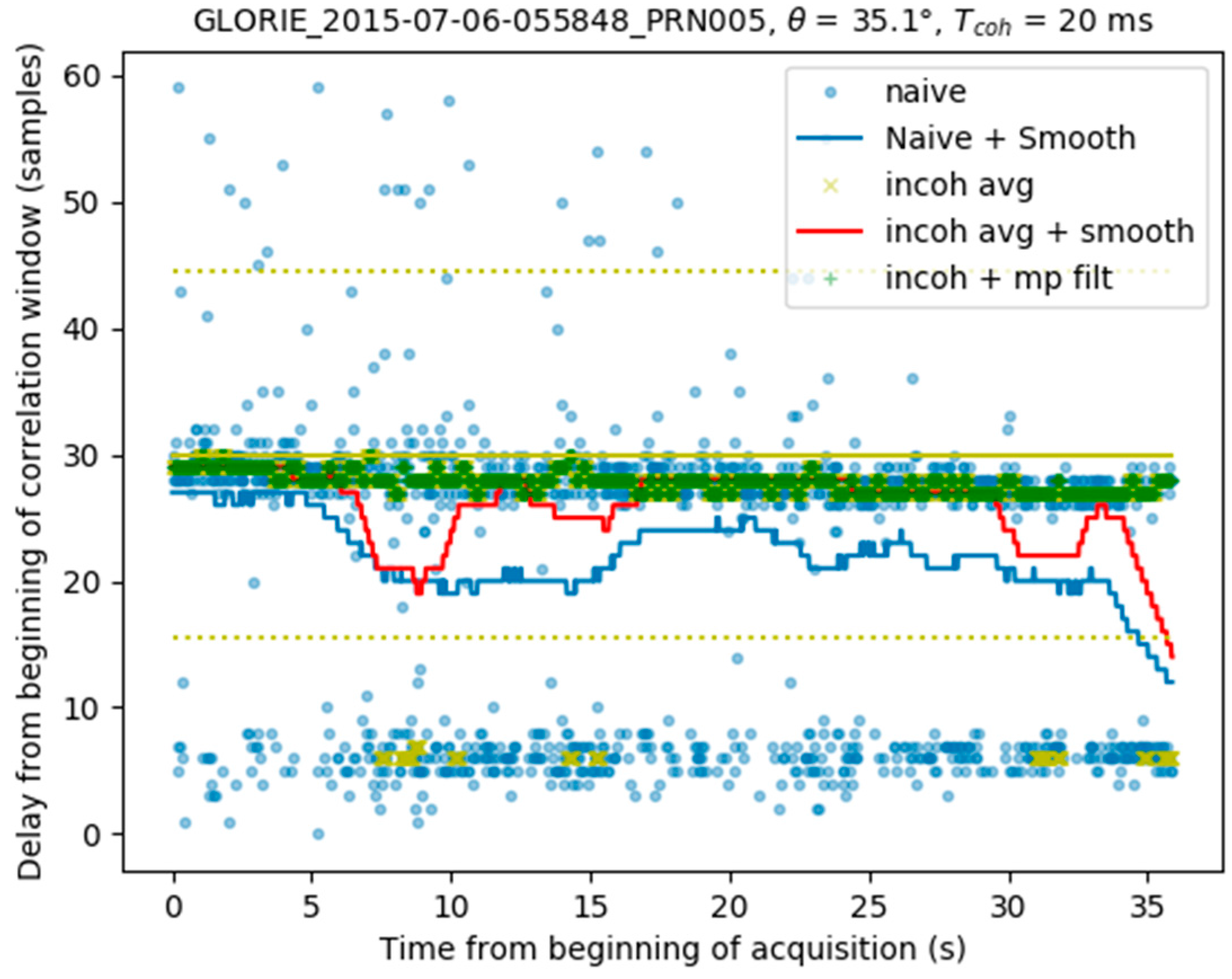
- A new peak search is carried out with incoherent averaging (see previous section) within the new peak search window, which has a total width equal to 90% of the theoretical difference in delay:where and is the new location of the correlation window. In Figure 11 this window corresponds to the area between the two yellow dashed lines.
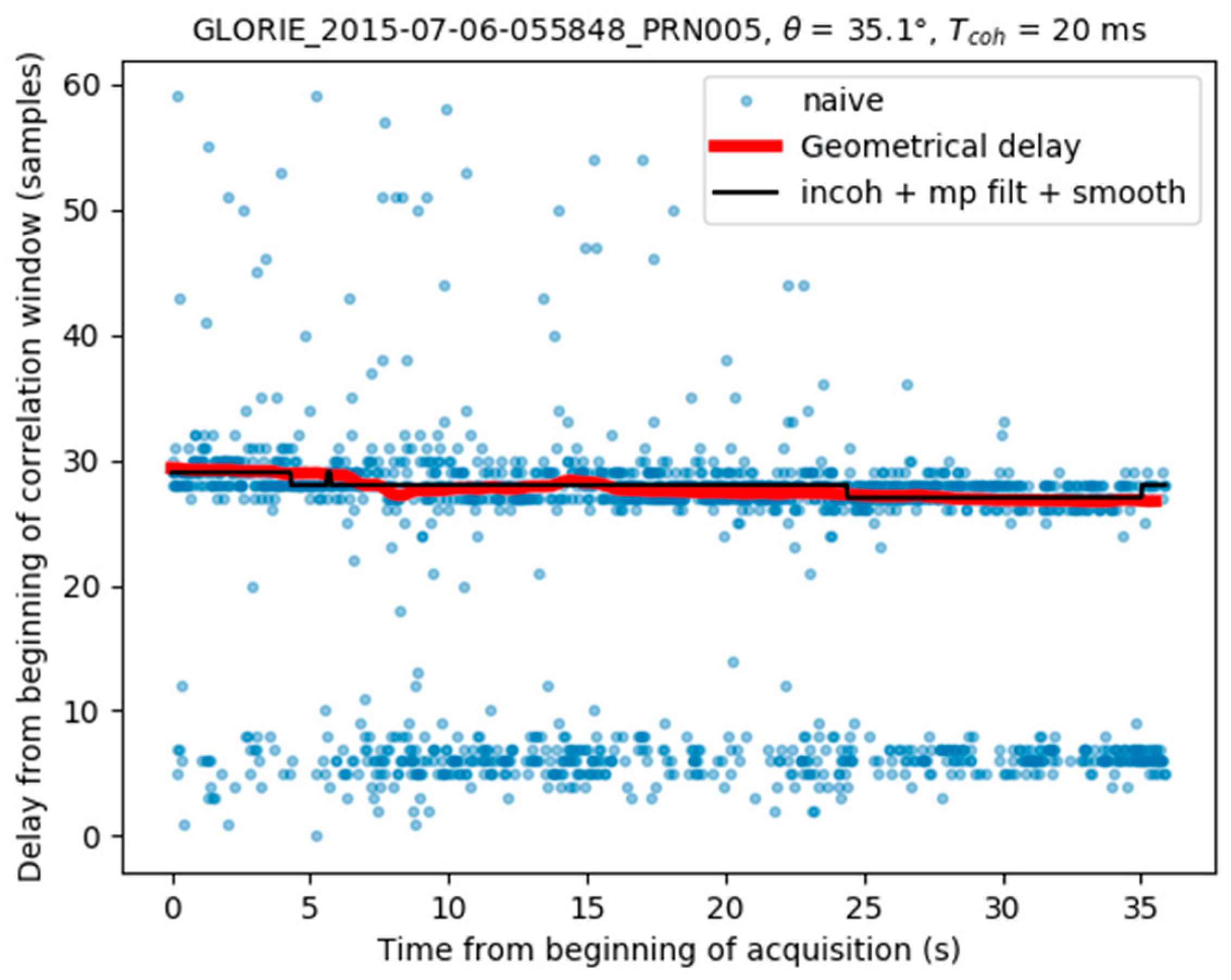
- The final peak time series is smoothed, using the procedure described in Section 3.1. Figure 12 illustrates the final result, in which the peak locations determined by the full algorithm (black line) are found to be very stable, with no contamination from the direct signal.
4. Impact on the Dataset
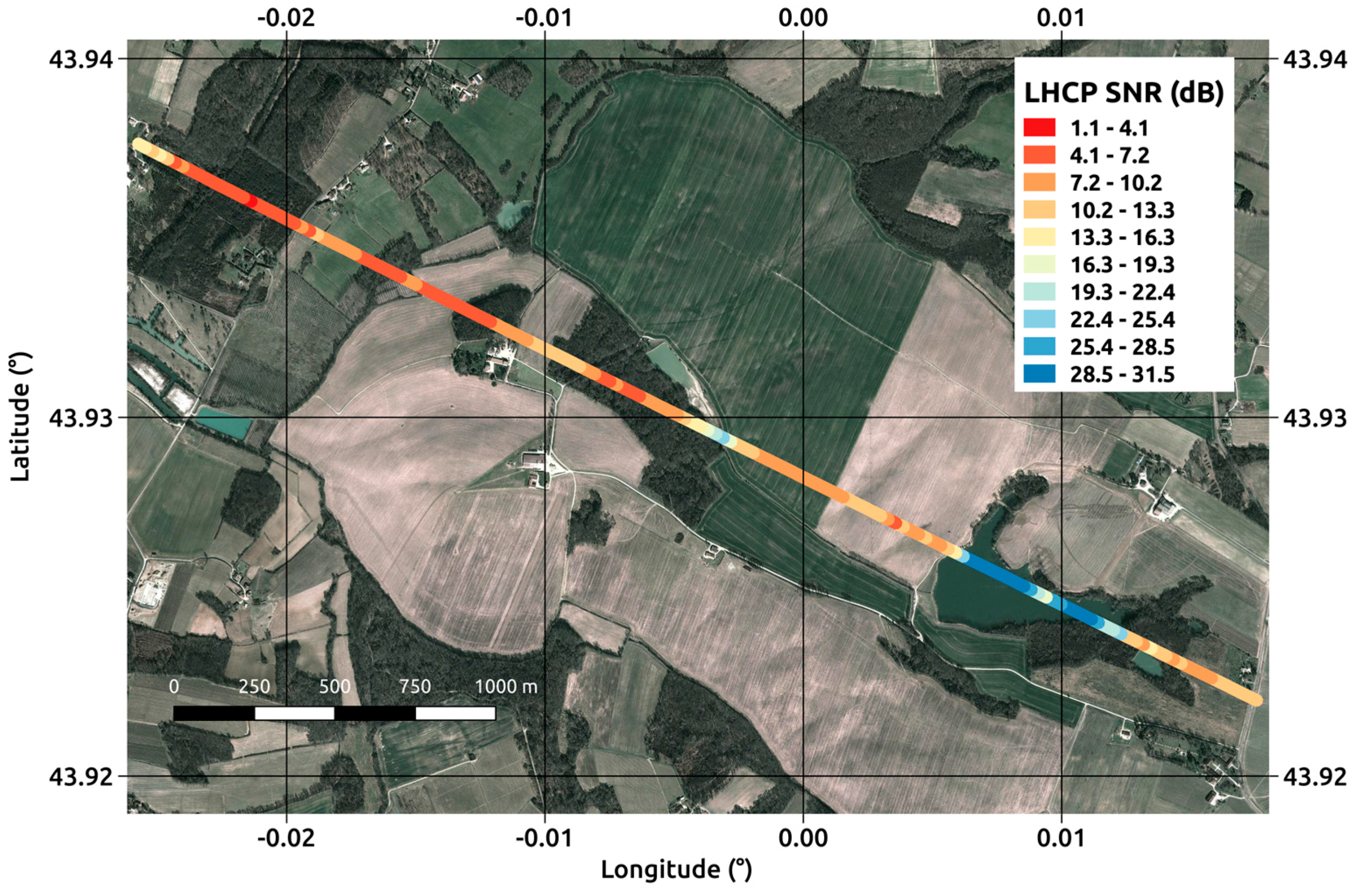
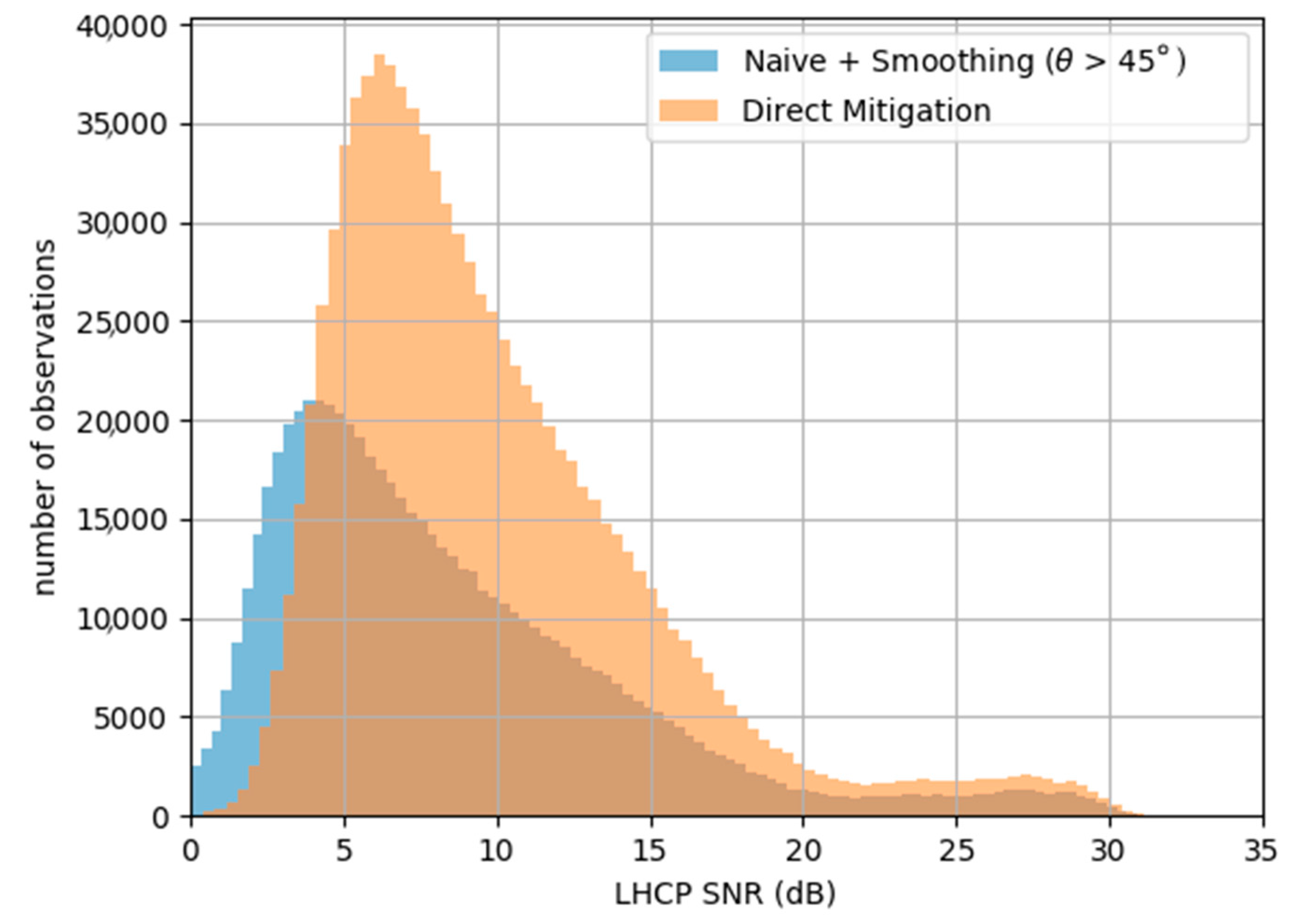
4.1. Improvements in Signal Sensitivity
4.2. Improvements in Data Availability
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Baghdadi, N.; Zribi, M. Optical Remote Sensing of Land Surfaces: Techniques and Methods, 1st ed.; Baghdadi, N., Zribi, M., Eds.; ISTE Press: London, UK; Elsevier: Oxford, UK, 2016. [Google Scholar]
- Zribi, M.; Saux-Picart, S.; André, C.; Descroix, L.; Ottlé, C.; Kallel, A. Soil moisture mapping based on ASAR/ENVISAT radar data over a Sahelian region. Int. J. Remote Sens. 2007, 28, 3547–3565. [Google Scholar] [CrossRef]
- Zribi, M.; Pardé, M.; Boutin, J.; Fanise, P.; Hauser, D.; Dechambre, M.; Kerr, Y.; Leduc-Leballeur, M.; Reverdin, G.; Skou, N.; et al. CAROLS: A new airborne L-band radiometer for ocean surface and land observations. Sensors 2011, 11, 719–742. [Google Scholar] [CrossRef] [PubMed]
- Zavorotny, V.U.; Gleason, S.; Cardellach, E.; Camps, A. Tutorial on Remote Sensing Using GNSS Bistatic Radar of Opportunity. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–45. [Google Scholar] [CrossRef]
- Zavorotny, V.; Masters, D.; Gasiewski, A.; Bartram, B.; Katzberg, S.; Axelrad, P.; Zamora, R. Seasonal polarimetric measurements of soil moisture using tower-based GPS bistatic radar. In Proceedings of the IGARSS 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; Volume 2, pp. 7929–7931. [Google Scholar]
- Paloscia, S.; Santi, E.; Fontanelli, G.; Pettinato, S.; Egido, A.; Caparrini, M.; Motte, E.; Guerriero, L.; Pierdicca, N.; Floury, N. GNSS-R sensor sensitivity to soil moisture and vegetation biomass and comparison with SAR data performance. In Proceedings of the SAR Image Analysis, Modeling, and Techniques XIII, Dresden, Germany, 23 September 2013; p. 88910I. [Google Scholar]
- Masters, D.; Axelrad, P.; Katzberg, S. Initial results of land-reflected GPS bistatic radar measurements in SMEX02. Remote Sens. Environ. 2004, 92, 507–520. [Google Scholar] [CrossRef]
- Katzberg, S.J.; Torres, O.; Grant, M.S.; Masters, D. Utilizing calibrated GPS reflected signals to estimate soil reflectivity and dielectric constant: Results from SMEX02. Remote Sens. Environ. 2006, 100, 17–28. [Google Scholar] [CrossRef]
- Paloscia, S.; Santi, E.; Fontanelli, G.; Pettinato, S.; Egido, A.; Caparrini, M.; Motte, E.; Guerriero, L.; Pierdicca, N.; Floury, N. Grass: AN experiment on the capability of airborne GNSS-R sensors in sensing soil moisture and vegetation biomass. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 2110–2113. [Google Scholar]
- Egido, A.; Paloscia, S.; Motte, E.; Guerriero, L.; Pierdicca, N.; Caparrini, M.; Santi, E.; Fontanelli, G.; Floury, N. Airborne GNSS-R Polarimetric Measurements for Soil Moisture and Above-Ground Biomass Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1522–1532. [Google Scholar] [CrossRef]
- Motte, E.; Zribi, M.; Fanise, P.; Egido, A.; Darrozes, J.; Al-Yaari, A.; Baghdadi, N.; Baup, F.; Dayau, S.; Fieuzal, R.; et al. GLORI: A GNSS-R Dual Polarization Airborne Instrument for Land Surface Monitoring. Sensors 2016, 16, 732. [Google Scholar] [CrossRef] [PubMed]
- Lestarquit, L.; Peyrezabes, M.; Darrozes, J.; Motte, E.; Roussel, N.; Wautelet, G.; Frappart, F.; Ramillien, G.; Biancale, R.; Zribi, M. Reflectometry With an Open-Source Software GNSS Receiver: Use Case With Carrier Phase Altimetry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1–11. [Google Scholar] [CrossRef]
- Ferrazzoli, P.; Guerriero, L.; Pierdicca, N.; Rahmoune, R. Forest biomass monitoring with GNSS-R: Theoretical simulations. Adv. Space Res. 2011, 47, 1823–1832. [Google Scholar] [CrossRef]
- Guerriero, L.; Pierdicca, N.; Pulvirenti, L.; Ferrazzoli, P. Use of satellite radar bistatic measurements for crop monitoring: A simulation study on corn fields. Remote Sens. 2013, 5, 864–890. [Google Scholar] [CrossRef]
- Pierdicca, N.; Guerriero, L.; Giusto, R.; Brogioni, M.; Egido, A. SAVERS: A simulator of GNSS reflections from bare and vegetated soils. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6542–6554. [Google Scholar] [CrossRef]
- Wu, X.; Jin, S. GNSS-Reflectometry: Forest canopies polarization scattering properties and modeling. Adv. Space Res. 2014, 54, 863–870. [Google Scholar] [CrossRef]
- Unwin, M.; Blunt, P.; Van Steenwijk, R.D.V.; Duncan, S.; Martin, G.; Jales, P.; Satellite, S. GNSS Remote Sensing and Technology Demonstration on TechDemoSat-1. In Proceedings of the 24th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 2970–2975. [Google Scholar]
- Ruf, C.S.; Gleason, S.; Jelenak, Z.; Katzberg, S.; Ridley, A.; Rose, R.; Scherrer, J.; Zavorotny, V. The CYGNSS nanosatellite constellation hurricane mission. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 214–216. [Google Scholar]
- Chew, C.; Shah, R.; Zuffada, C.; Hajj, G.; Masters, D.; Mannucci, A.J. Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission. Geophys. Res. Lett. 2016, 43, 3317–3324. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.P.; Liu, P.-W.; Judge, J. Sensitivity of GNSS-R Spaceborne Observations to Soil Moisture and Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4730–4742. [Google Scholar] [CrossRef]
- Savitzky, A.; Golay, M.J.E. Smoothing and Differentiation of Data by Simplified Least Squares Procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]


















© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Motte, E.; Zribi, M. Optimizing Waveform Maximum Determination for Specular Point Tracking in Airborne GNSS-R. Sensors 2017, 17, 1880. https://doi.org/10.3390/s17081880
Motte E, Zribi M. Optimizing Waveform Maximum Determination for Specular Point Tracking in Airborne GNSS-R. Sensors. 2017; 17(8):1880. https://doi.org/10.3390/s17081880
Chicago/Turabian StyleMotte, Erwan, and Mehrez Zribi. 2017. "Optimizing Waveform Maximum Determination for Specular Point Tracking in Airborne GNSS-R" Sensors 17, no. 8: 1880. https://doi.org/10.3390/s17081880
APA StyleMotte, E., & Zribi, M. (2017). Optimizing Waveform Maximum Determination for Specular Point Tracking in Airborne GNSS-R. Sensors, 17(8), 1880. https://doi.org/10.3390/s17081880