A Compact Energy Harvesting System for Outdoor Wireless Sensor Nodes Based on a Low-Cost In Situ Photovoltaic Panel Characterization-Modelling Unit





Abstract
:1. Introduction
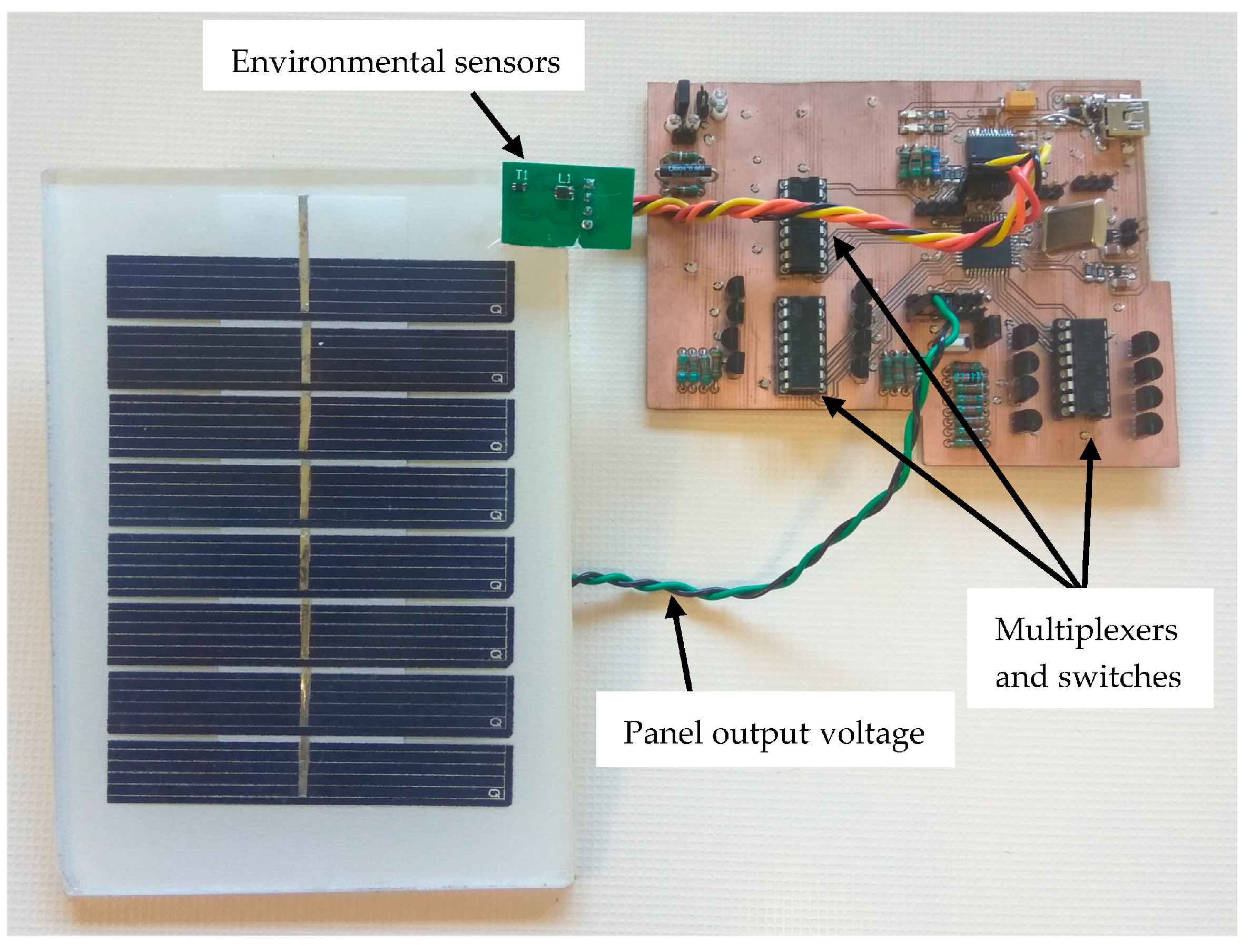
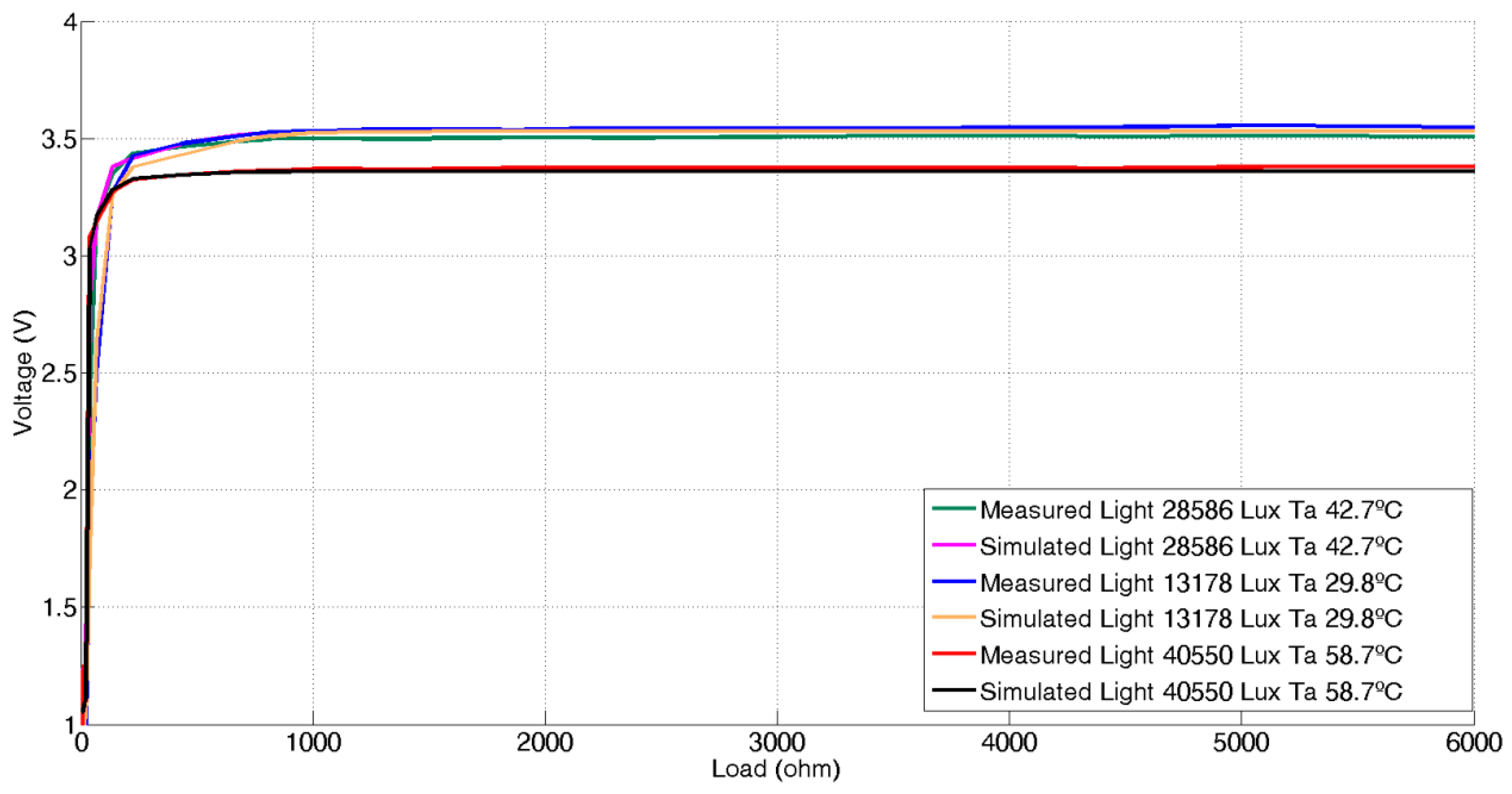
2. In Situ Photovoltaic Panel Characterization
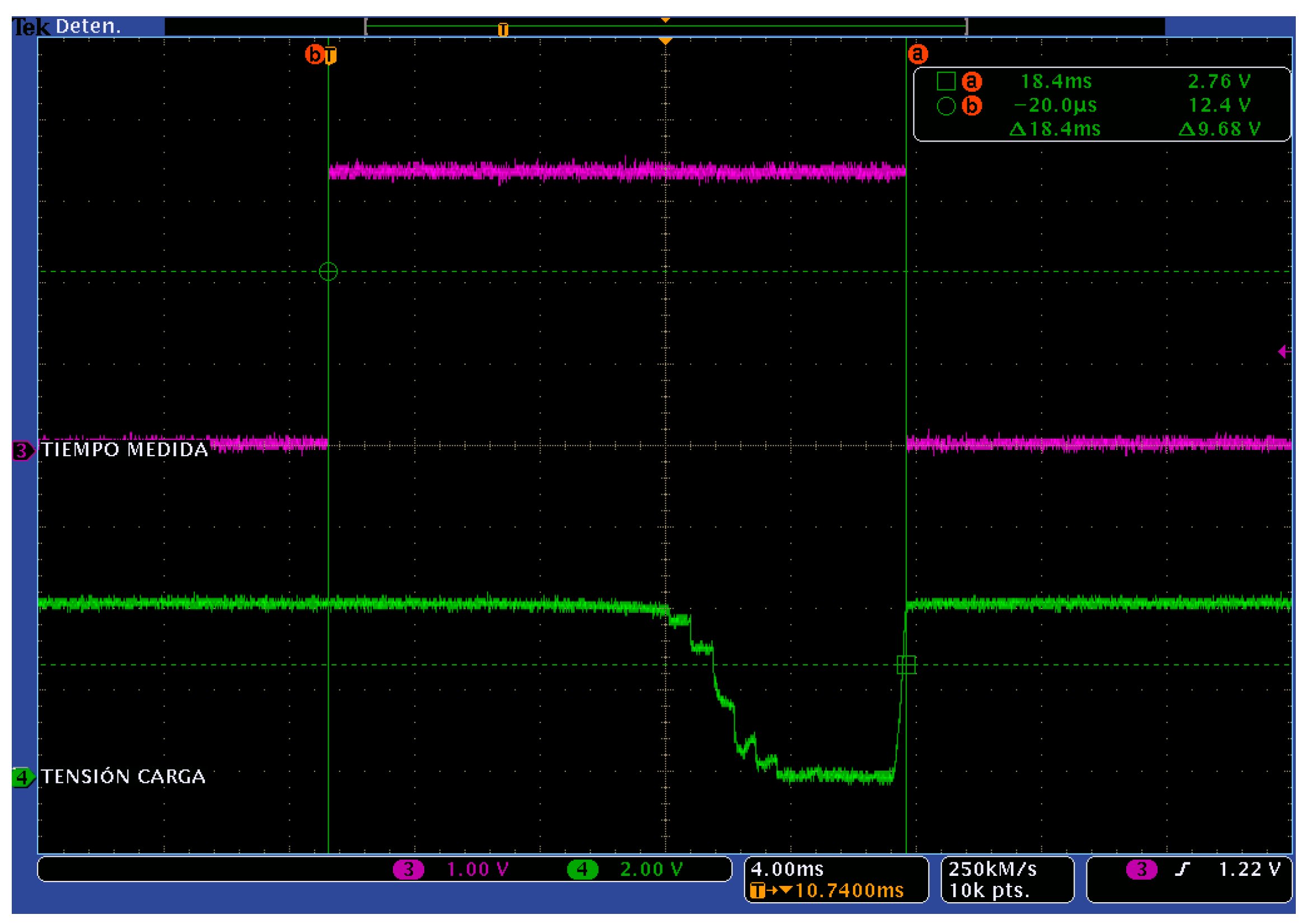
2.1. Variable Load Module
2.2. Control and Acquisition System
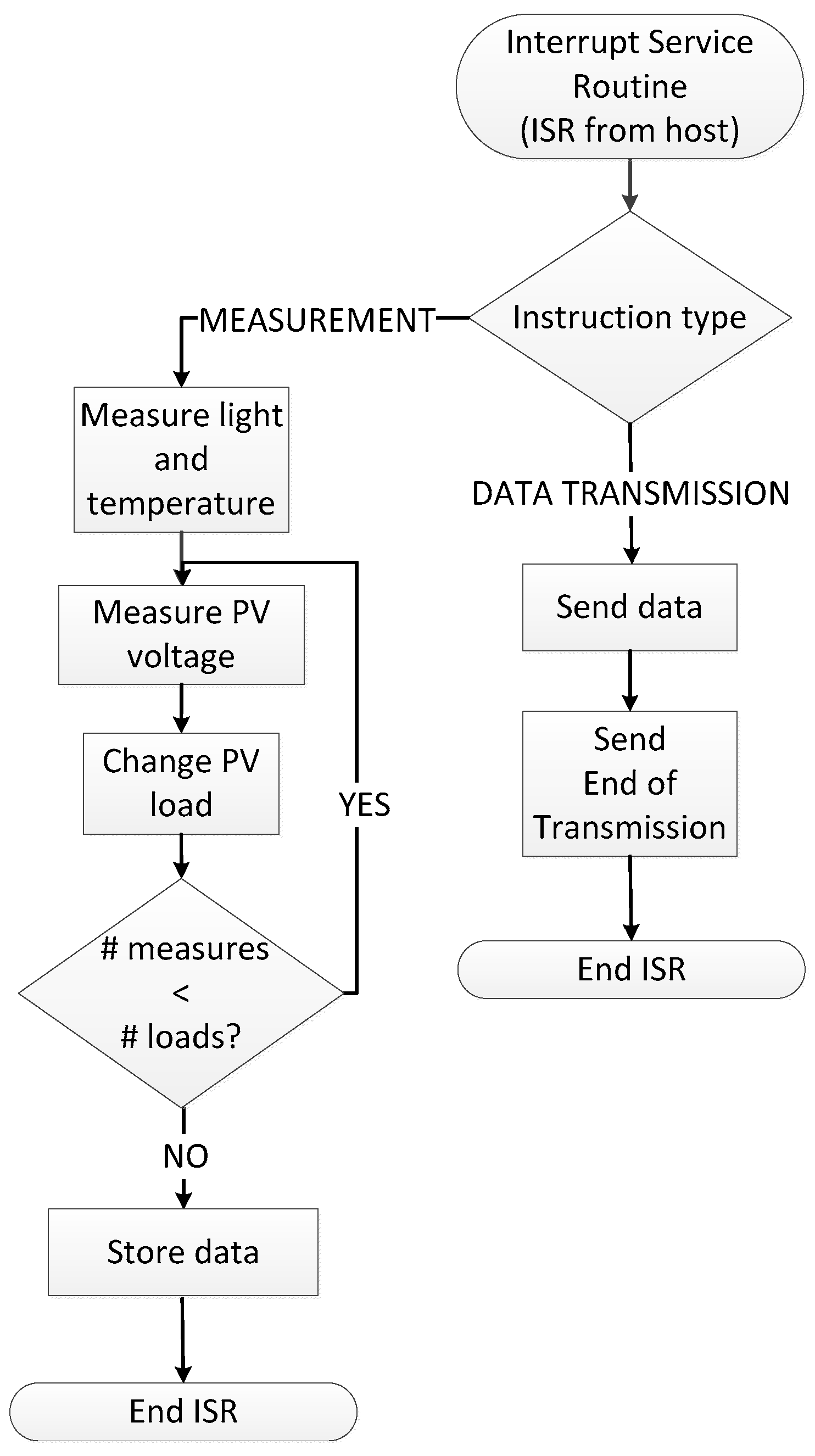
2.3. System Software
2.4. Host Control
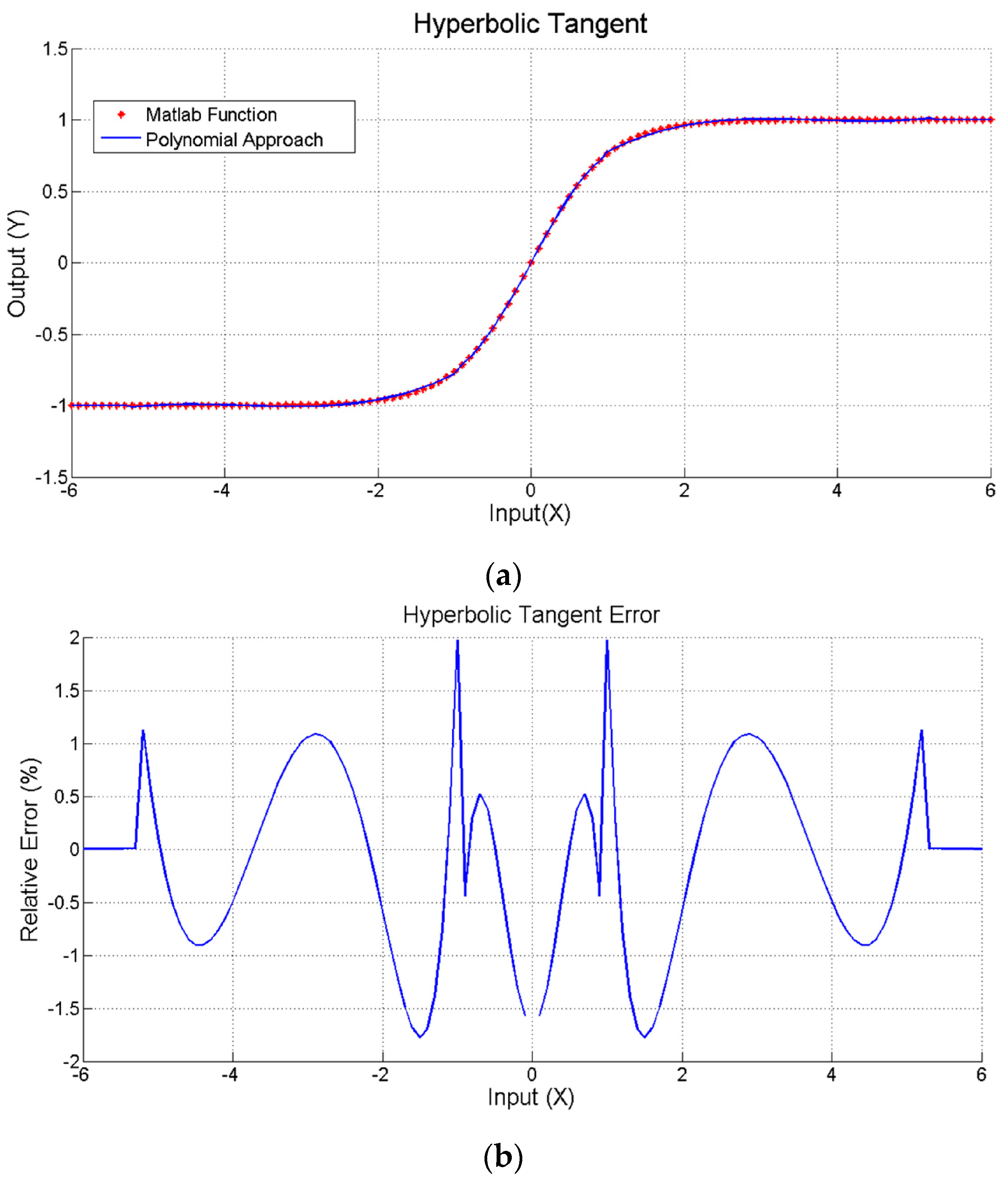
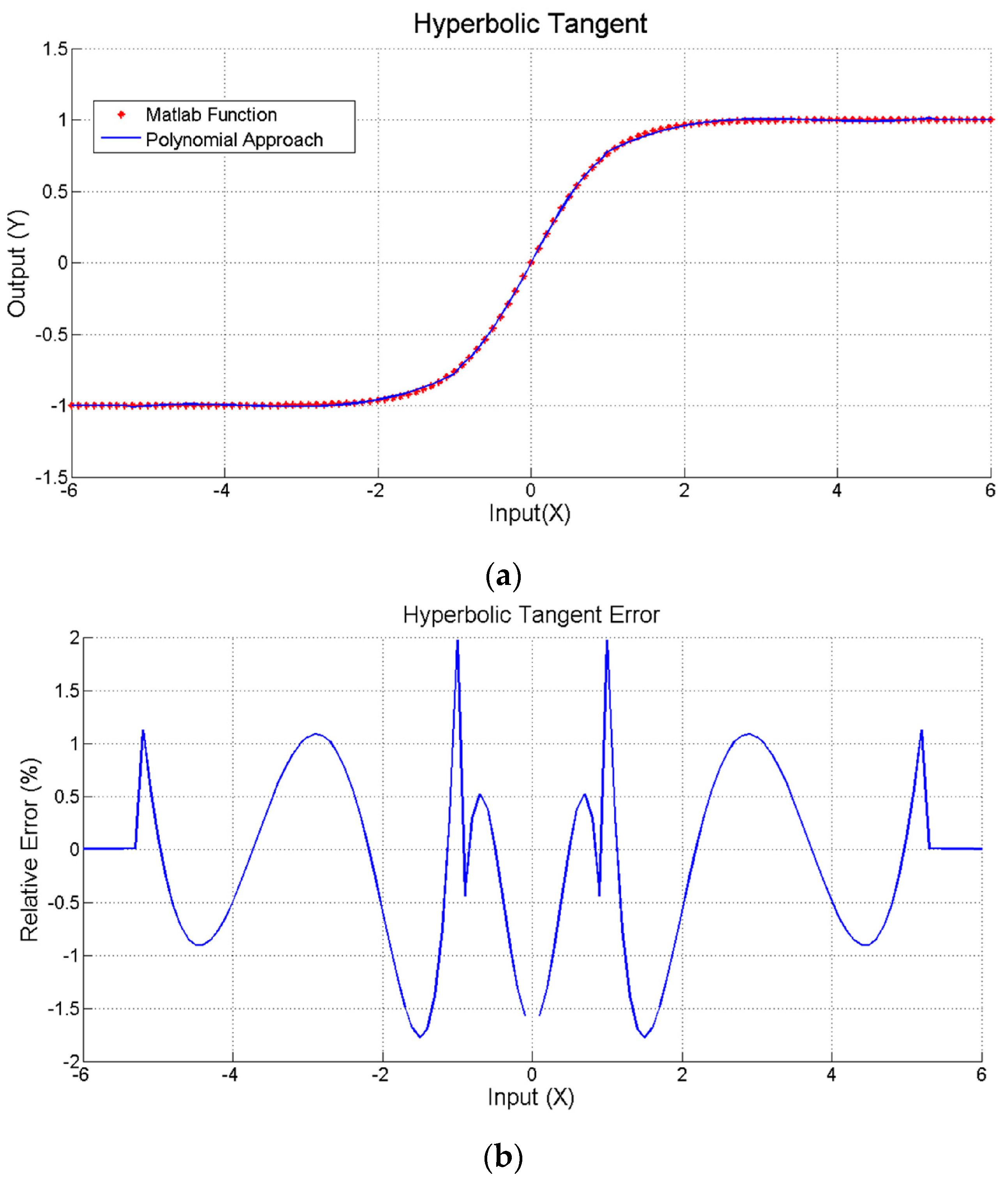
3. ANN-Based Photovoltaic Panel Modelling
4. Solar Energy Harvesting System Architecture
4.1. Maximum Power Point Tracking
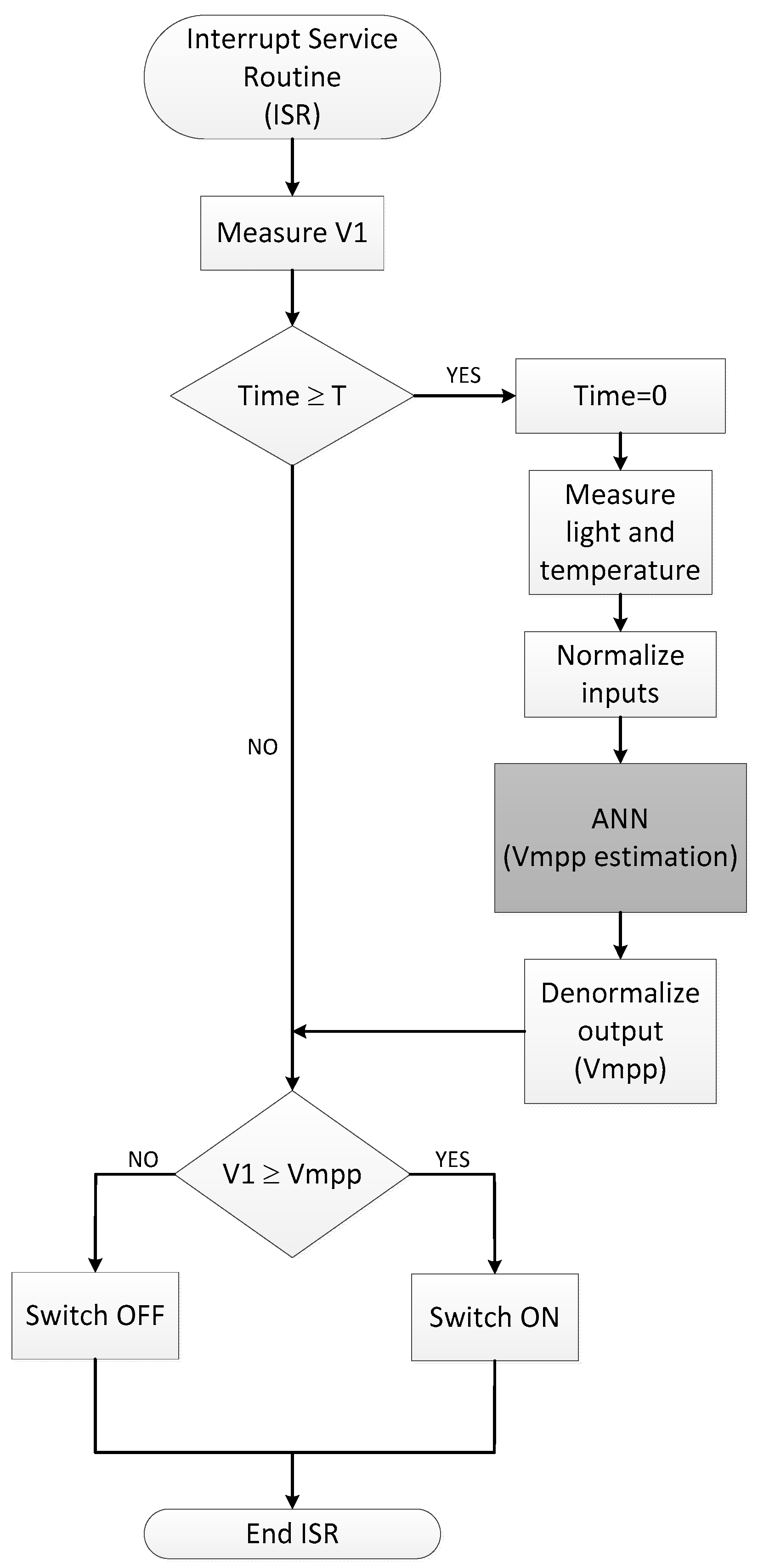
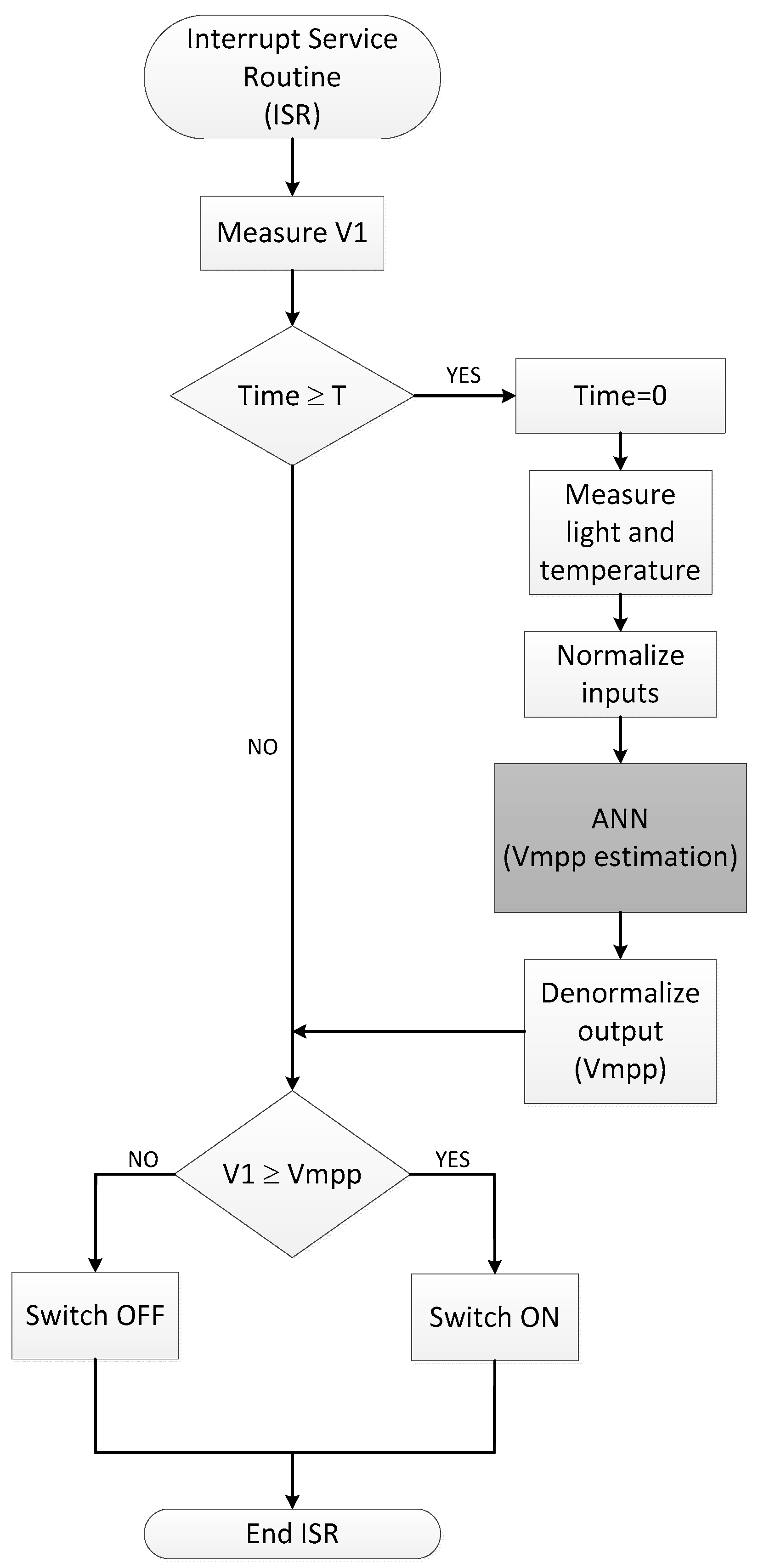
4.2. Maximum Power Point Tracking Technique Based on ANN Modelling
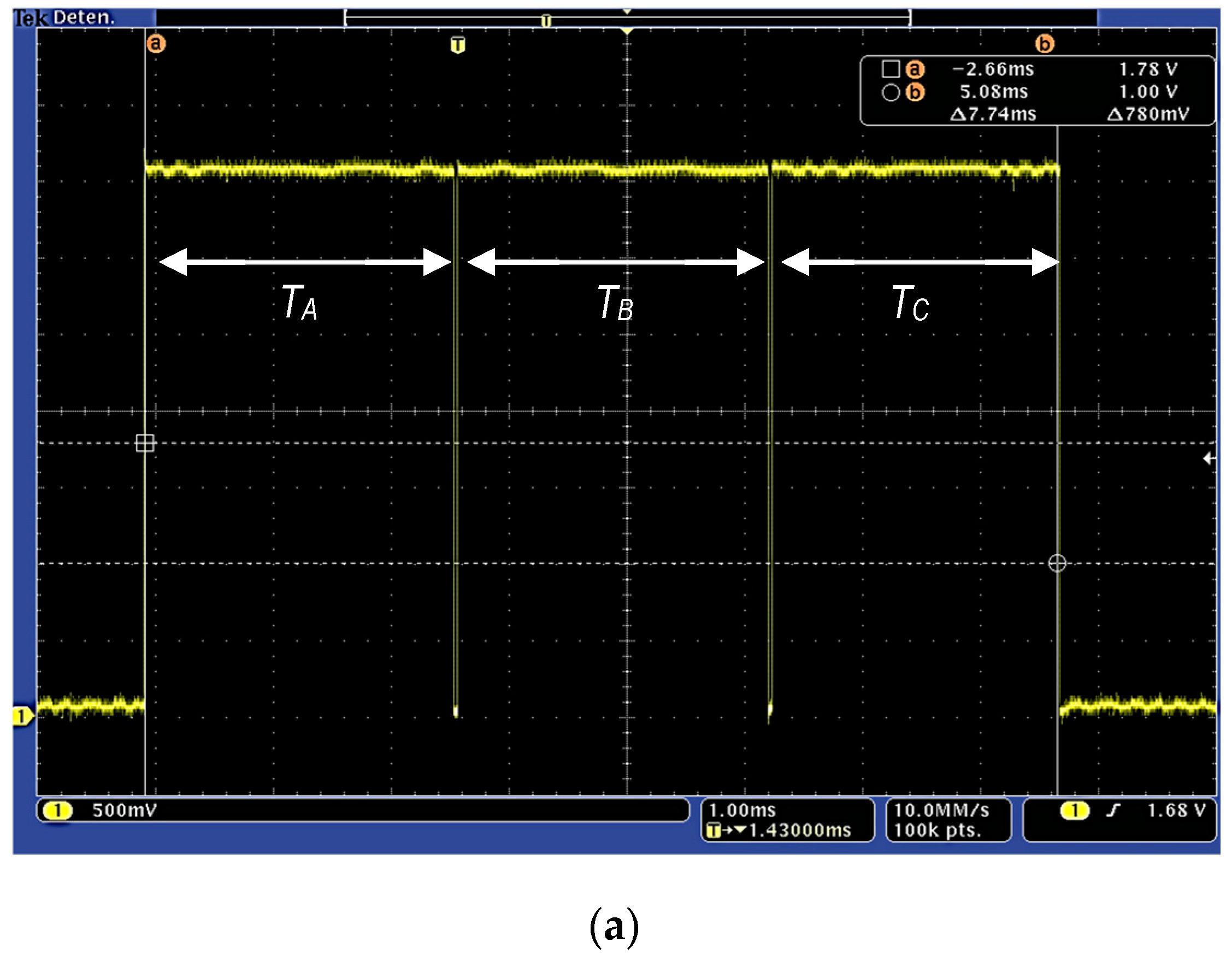
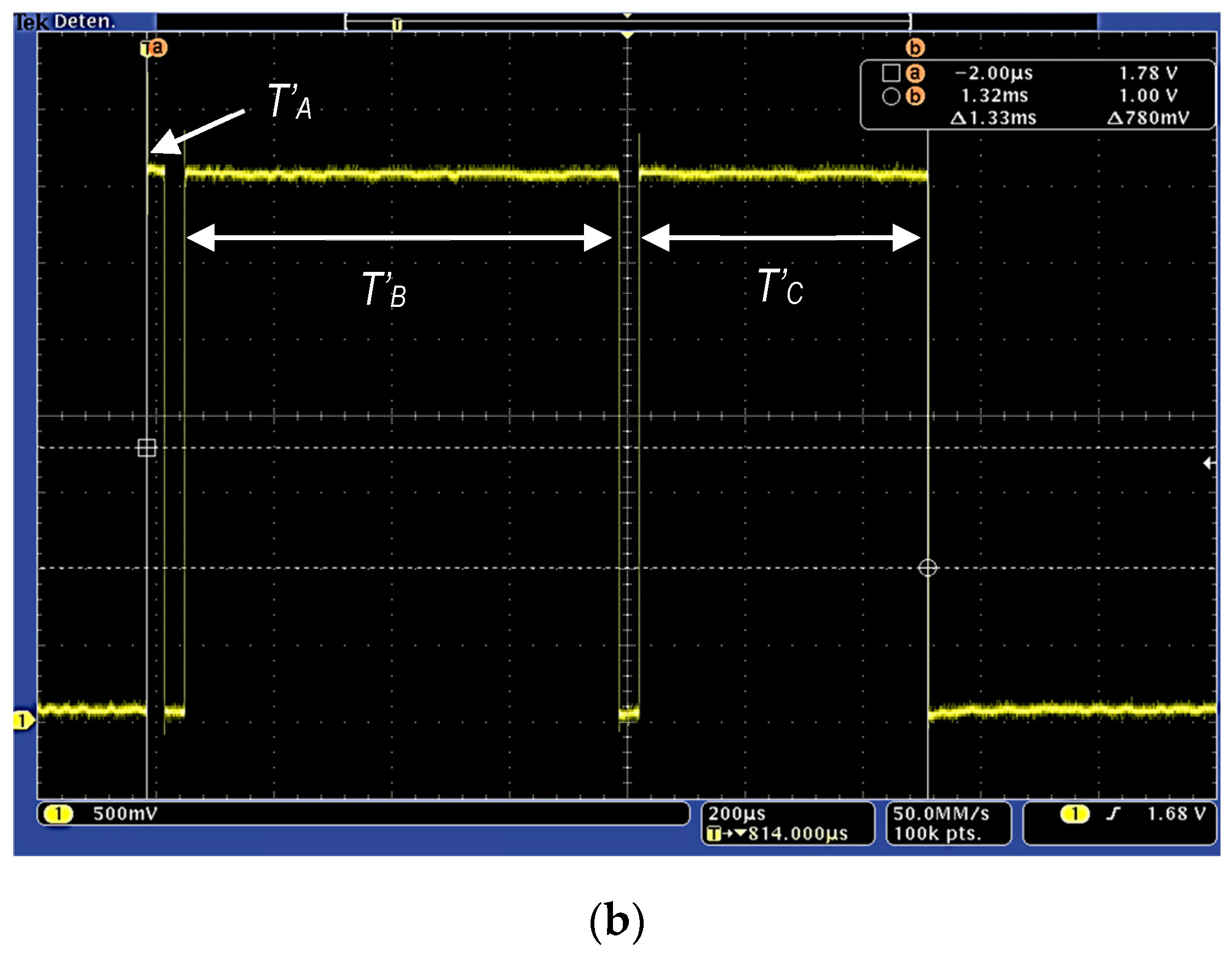
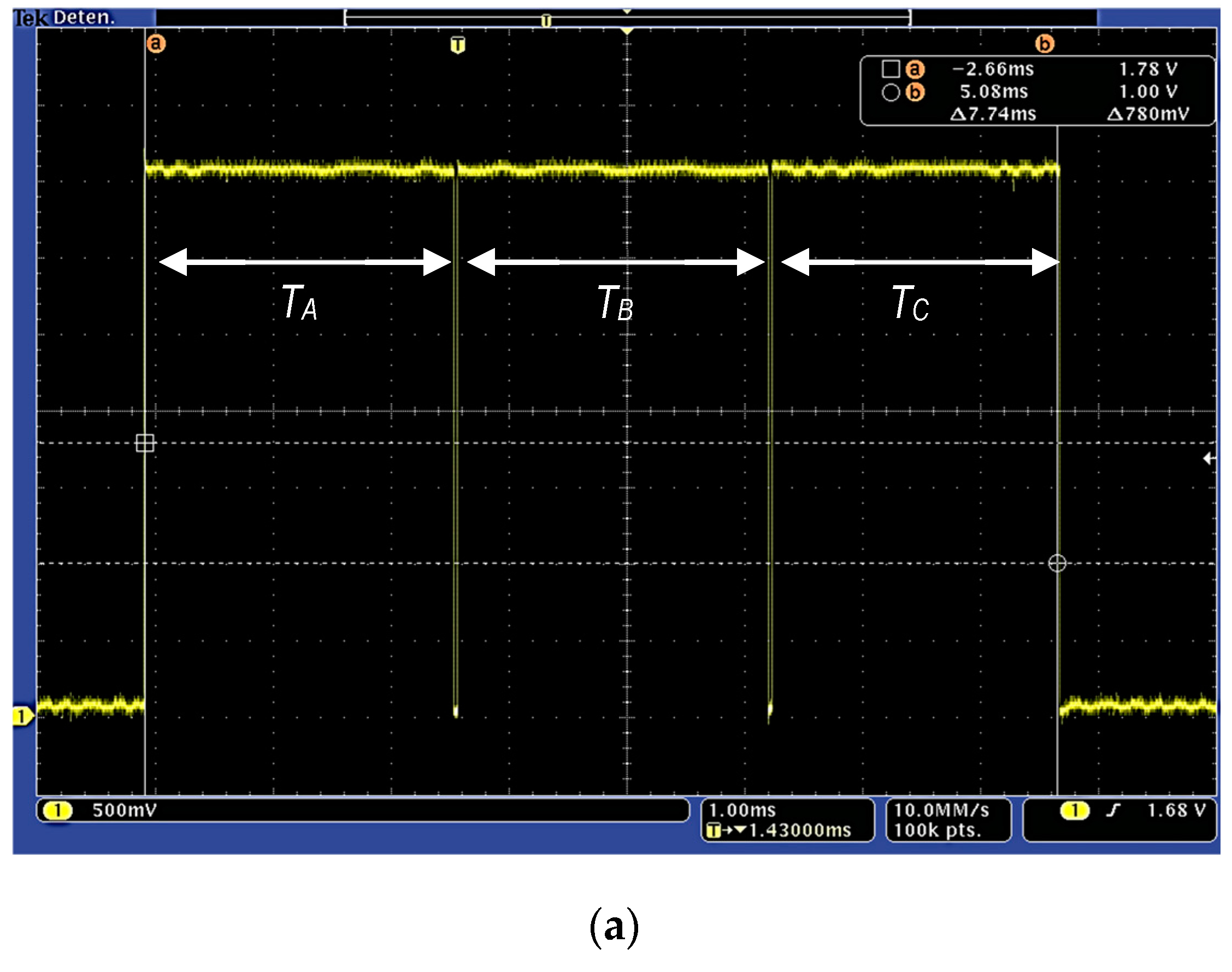
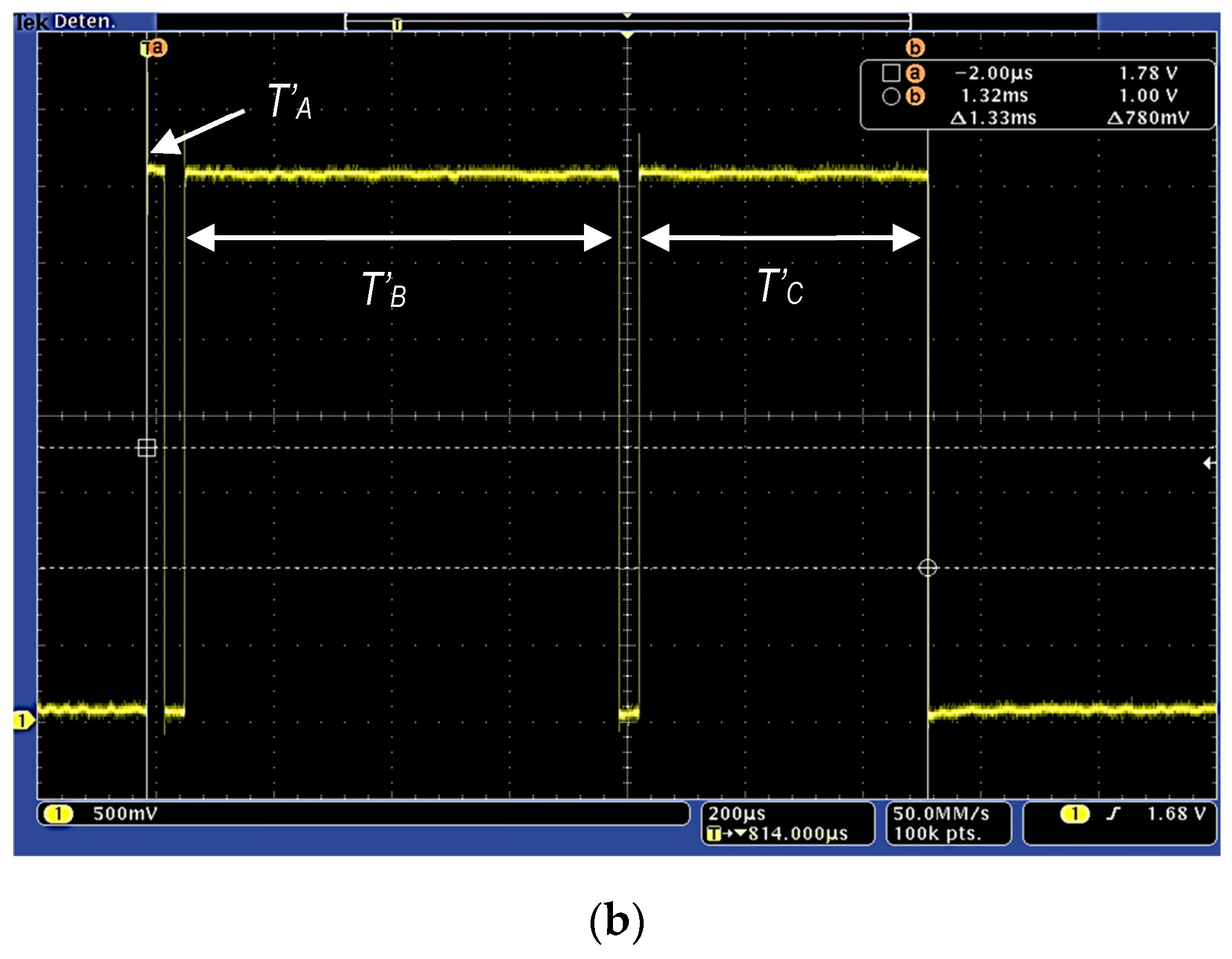
4.3. MPPT Comparison
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Han, G.; Dong, Y.; Guo, H.; Shu, L.; Wu, D. Cross-layer optimized routing in wireless sensor networks with duty cycle and energy harvesting. Wirel. Commun. Mob. Comput. 2015, 15, 1957–1981. [Google Scholar] [CrossRef]
- Cammarano, A.; Petrioli, C.; Spenza, D. Online Energy Harvesting Prediction in Environmentally Powered Wireless Sensor Networks. IEEE Sens. J. 2016, 16, 6793–6804. [Google Scholar] [CrossRef]
- Zou, T.; Lin, S.; Feng, Q.; Chen, Y. Energy-Efficient Control with Harvesting Predictions for Solar-Powered Wireless Sensor Networks. Sensors 2016, 16, 53. [Google Scholar] [CrossRef] [PubMed]
- Yoon, I.; Kim, H.; Noh, D.K. Adaptive Data Aggregation and Compression to Improve Energy Utilization in Solar-Powered Wireless Sensor Networks. Sensors 2017, 17, 1226. [Google Scholar] [CrossRef] [PubMed]
- Mandourarakis, I.; Koutroulis, E. Optimal design of a boost-type DC-DC converter for PV power-supplied wireless sensor networks. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 1100–1105. [Google Scholar]
- Penella-López, M.T.; Gasulla-Forner, M. Powering Autonomus Sensors; Springer: Dordrecht, The Netherlands, 2011. [Google Scholar]
- Altas, I.H.; Sharaf, A.M. A Photovoltaic Array Simulation Model for Matlab-Simulink GUI Environment. In Proceedings of the International Conference on Clean Electrical Power, ICCEP ‘07, Capri, Italy, 21–23 May 2007; pp. 341–345. [Google Scholar]
- Khatib, T.; Elemenreich, W. Modeling of Photovoltaic Systems Using MATLAB: Simplified Green Codes; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Mahmoud, S.A.; Alsari, M.M.; Reda, E.I.; Alhammadi, R.M. MATLAB modeling and simulation of photovoltaic modules. In Proceedings of the 2012 IEEE 55th International Midwest Symposium on Circuits and Systems (MWSCAS), Boise, ID, USA, 5–8 August 2012; pp. 786–789. [Google Scholar]
- Ropp, M.E.; Gonzalez, S. Development of a MATLAB/Simulink Model of a Single-Phase Grid-Connected Photovoltaic System. IEEE Trans. Energy Convers. 2009, 24, 195–202. [Google Scholar] [CrossRef]
- Can, H.; Ickilli, D.; Parlak, K.S. A New Numerical Solution Approach for the Real-Time Modeling of Photovoltaic Panels. In Proceedings of the Power and Energy Engineering Conference (APPEEC), Shanghai, China, 27–29 March 2012; pp. 1–4. [Google Scholar]
- Ulapane, N.N.; Dhanapala, C.H.; Wickramasinghe, S.M.; Abeyratne, S.G.; Rathnayake, N.; Binduhewa, P.J. Extraction of parameters for simulating photovoltaic panels. In Proceedings of the 2011 6th International Conference on Industrial and Information Systems (ICIIS), Kandy, Sri Lanka, 16–19 August 2011; pp. 539–544. [Google Scholar]
- Castañer, L.; Silvestre, S. Modelling Photovoltaic Systems Using PSpice; John Wiley & Sons: Chichester, UK, 2002. [Google Scholar]
- Bukshtab, M. Applied Photometry, Radiometry, and Measurements of Optical Losses; Springer: New York, NY, USA, 2012. [Google Scholar]
- Saberian, A.; Hizam, H.; Radzi, M.A.; Ab Kadir, M.Z.; Mirzaei, M. Modelling and Prediction of Photovoltaic Power Output Using Artificial Neural Networks. Int. J. Photoenergy 2014, 1–10, 469701. [Google Scholar] [CrossRef]
- Sánchez-García, J.L.; Espinosa-Juárez, E.; Tapia-Juárez, R. Photovoltaic panel characterization by using artificial neural networks and comparison with classical models. In Proceedings of the 2015 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 4–6 November 2015; pp. 1–6. [Google Scholar]
- Karapete, E.; Boztepe, M.; Colak, M. Neural network based solar cell model. Energy Conver. Manag. 2006, 47, 1159–1178. [Google Scholar]
- Haykin, S. Neural Networks and Learning Machines; Pearson Education: New Jersey, NJ, USA, 2009. [Google Scholar]
- Principe, J; Euliano, N.; Lefebvre, W. Neural and Adaptive Systems, Fundamentals through Simulations; John Wiley & Sons: New York, NY, USA, 2000. [Google Scholar]
- Antolín, D.; Medrano, N.; Calvo, B. Reliable Lifespan Evaluation of a Remote Environment Monitoring System Based on Wireless Sensor Networks and Global System for Mobile Communications. J. Sens. 2016, 2016, 1–12. [Google Scholar] [CrossRef]
- Mohan, N.; Underland, T.M.; Robbins, W.P. Power Electronics: Converters, Applications, and Design; John Wiley & Sons: New York, NY, USA, 2003. [Google Scholar]
- Hart, D.W. Power Electronics; McGraw-Hill: New York, NY, USA, 2011. [Google Scholar]
- Texas Instruments. Application Note-1994: Modeling and Design of Current Mode Control Boost Converters. Texas Instruments Application Report SNVA408B; Texas Instruments: Dallas, TX, USA, 2013. [Google Scholar]
- Balato, M.; Costanzo, L.; Vitelli, M. Maximum Power Point Tracking Techniques; Wiley Online Encyclopedia of Electrical and Electronics Engineering; John Wiley & Sons: New Jersey, NJ, USA, 2016; pp. 1–26. [Google Scholar]
- Esram, T.; Chapman, P.L. Comparison of photovoltaic array maximum power point tracking techniques. IEEE Trans. Energy Conver. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Gupta, A.K.; Saxena, R. Review on widely-used MPPT techniques for PV applications. In Proceedings of the 2016 International Conference on Innovation and Challenges in Cyber Security (ICICCS-INBUSH), Noida, India, 3–5 February 2016; pp. 270–273. [Google Scholar]
- Pressman, A.; Billings, K.; Morey, T. Switching Power Supply Design; McGraw-Hill: New York, NY, USA, 2009. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SEL(1:3) | RMUX1 (Ω) | RMUX2 (Ω) | RMUX3 (Ω) |
|---|---|---|---|
| 000 | 10,000 | 1800 | 62 |
| 001 | 8200 | 1200 | 33 |
| 010 | 7500 | 1000 | 16 |
| 011 | 6200 | 820 | 8.2 |
| 100 | 5100 | 680 | 3.9 |
| 101 | 4300 | 430 | 2 |
| 110 | 3300 | 220 | 1 |
| 111 | 2200 | 130 | 0.1 |
| Parameter | Upper Limit | Lower Limit |
|---|---|---|
| Light (lux) | 120,000 | 10,000 |
| Temperature (°C) | 70 | −10 |
| Voltage (V) | 5 | 2.8 |
| Panel load (Ω) | 10,000 | 0.1 |
| Component | Value |
|---|---|
| Cin | >25 µF |
| L1 | >6.7 mH |
| Diode | HSMS-2800 |
| Switch | IRFML8422 (MOSFET transistor) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antolín, D.; Medrano, N.; Calvo, B.; Martínez, P.A. A Compact Energy Harvesting System for Outdoor Wireless Sensor Nodes Based on a Low-Cost In Situ Photovoltaic Panel Characterization-Modelling Unit. Sensors 2017, 17, 1794. https://doi.org/10.3390/s17081794
Antolín D, Medrano N, Calvo B, Martínez PA. A Compact Energy Harvesting System for Outdoor Wireless Sensor Nodes Based on a Low-Cost In Situ Photovoltaic Panel Characterization-Modelling Unit. Sensors. 2017; 17(8):1794. https://doi.org/10.3390/s17081794
Chicago/Turabian StyleAntolín, Diego, Nicolás Medrano, Belén Calvo, and Pedro A. Martínez. 2017. "A Compact Energy Harvesting System for Outdoor Wireless Sensor Nodes Based on a Low-Cost In Situ Photovoltaic Panel Characterization-Modelling Unit" Sensors 17, no. 8: 1794. https://doi.org/10.3390/s17081794
APA StyleAntolín, D., Medrano, N., Calvo, B., & Martínez, P. A. (2017). A Compact Energy Harvesting System for Outdoor Wireless Sensor Nodes Based on a Low-Cost In Situ Photovoltaic Panel Characterization-Modelling Unit. Sensors, 17(8), 1794. https://doi.org/10.3390/s17081794