A Comprehensive Study on the Internet of Underwater Things: Applications, Challenges, and Channel Models †


Abstract
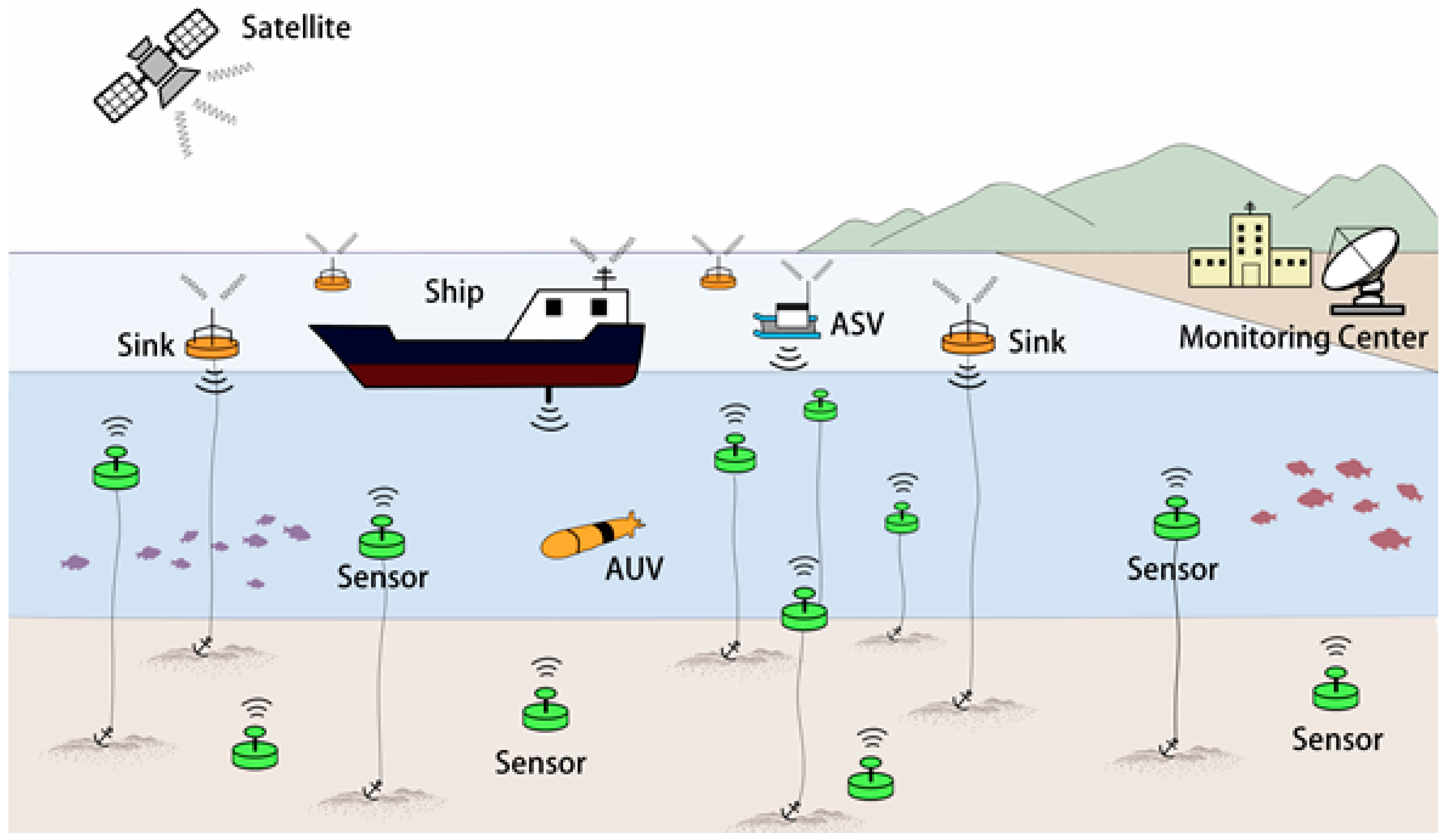
:1. Introduction
- we introduce and classify the potential IoUT applications;
- we point out the challenges for IoUT (i.e., the differences between UWSNs and TWSNs); and
- we investigate and evaluate the UWSN channel models, which are the technical core for IoUT.
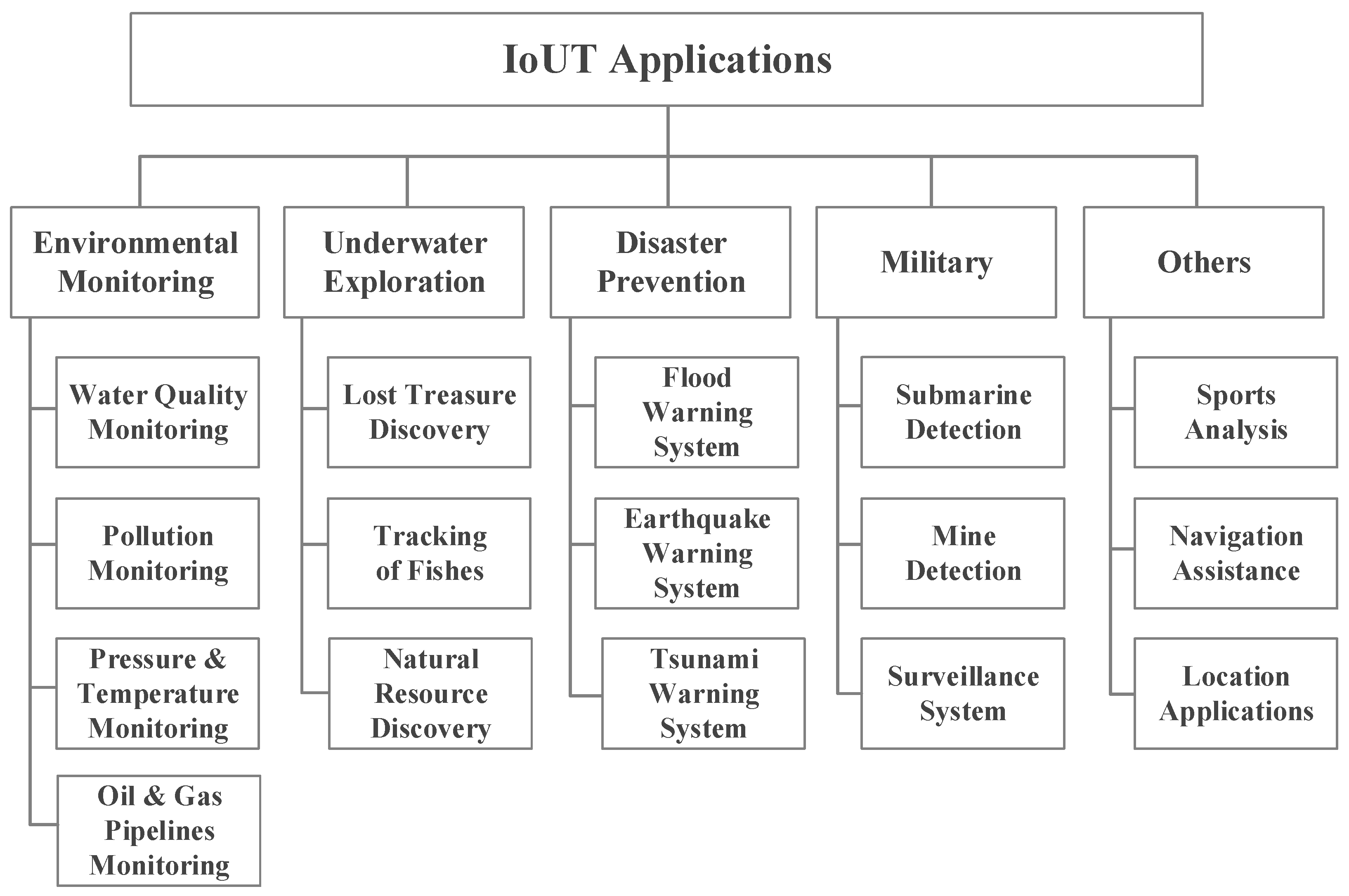
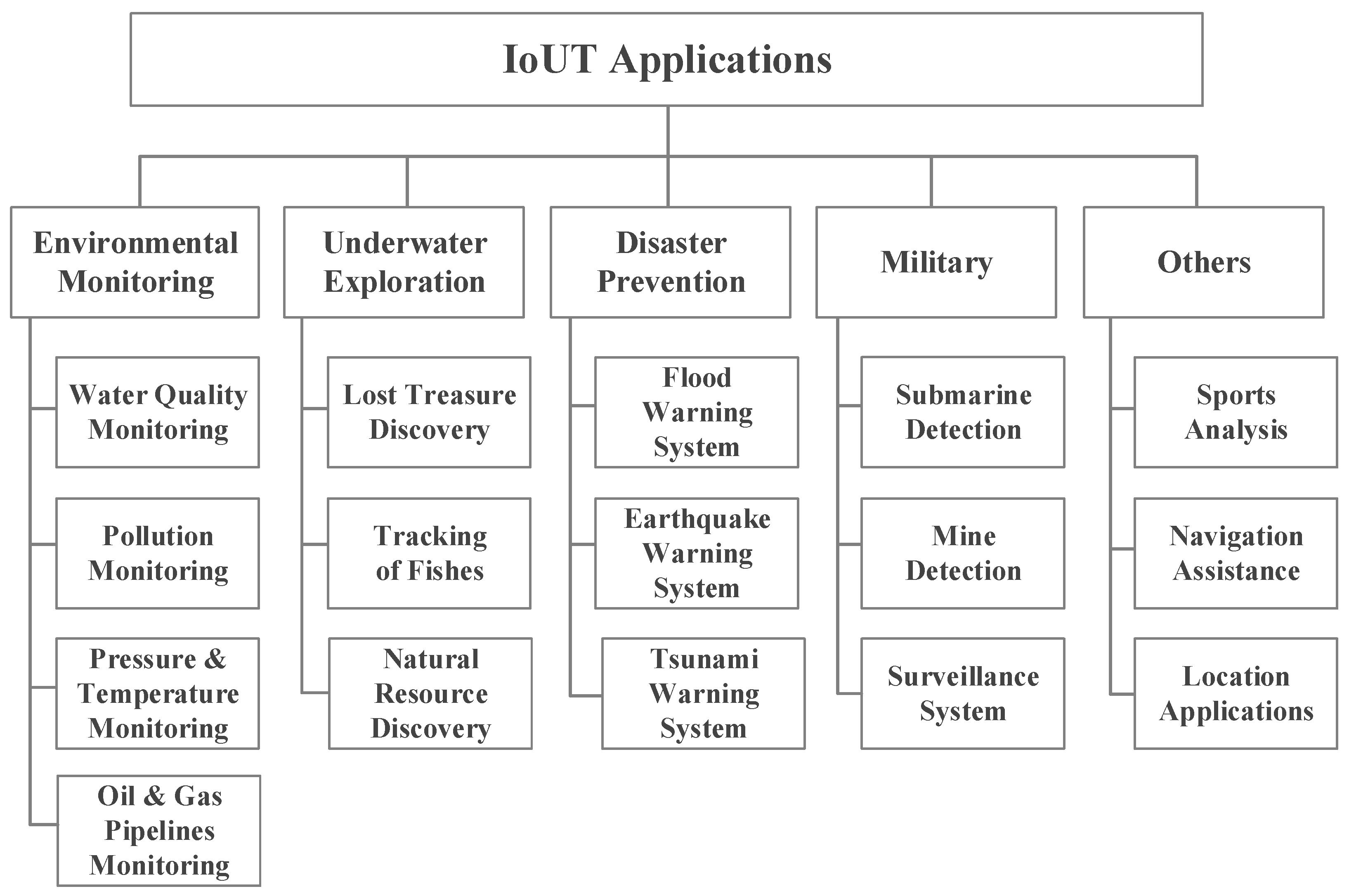
2. Applications
2.1. Environmental Monitoring
- The authors in [15] provide a practical example of the water quality monitoring system in India. Based on wireless sensor networks, they propose a suitable network architecture for a river water quality monitoring system. The monitoring system can help in continuous and remote monitoring of the water quality in India. Moreover, this paper presents the technical design of a sensor node that can be used for monitoring the pH of water. Note that the pH of water is one of the main parameters that indicates the quality of water. The sensed pH value will be wirelessly transmitted to the base station by using Zigbee communications. The authors also mentioned that the next phase of the project will include water-conductivity sensors, dissolved-oxygen sensors, and temperature sensors (in addition to the pH sensors).
- In [28], focusing on ocean pollution prevention, the authors reported an ad-hoc wireless sensor network to monitor the ocean pollution. Compared with the traditional long-range underwater communication, this work concentrates on the short-range multi-hop communication. Short-range communication implies that the sensor network can reuse some of the acoustic bandwidth and also avoid many of the challenges of long-range communication. More importantly, the short-range acoustic modems are less expensive than long-range modems. In addition, the authors propose a synchronization protocol that can improve the Quality of Service (QoS) and effectively enhance the lifetime of the underwater sensor network.
- In [29], the report presents a monitoring system deployed in Queensland, Australia, for monitoring the underwater temperature and luminosity (brightness), i.e., the information necessary to derive the health status of the coralline barrier. Based on wireless sensor networks, the authors present a real-world practical framework. They designed and implemented all aspects of the environmental monitoring system, including the sensing activity, data storage, local transmission (from the sensor nodes to the sinks), remote transmission (from the sinks to the control center), and visualization. For the local transmission between the sensors and sinks, the authors propose a power-aware TDMA protocol that can guarantee the robustness and adaptability when the network topology changes.
- In [16], the oil-and-gas related applications are highlighted. The authors first point out that the rapid advancement in wireless communication technologies has created a room for improvement in all areas of industrial practices related to oil and gas processing. From this point of view, the authors investigate and propose an oil and gas pipeline monitoring solution. By using wireless sensor networks, the proposed solution can provide reliable monitoring of oil and gas pipelines. Specifically, the proposed system is capable of reporting pipeline health-related statistics over large areas.
- In [12], the authors introduce numerous underwater monitoring applications. The authors define underwater monitoring as a network of sensors deployed underwater to monitor the underwater environments, characteristics, properties, or any objects of interest. The authors classify the underwater monitoring applications into three different categories and discuss each of them. The three categories are: (i) water quality monitoring; (ii) habitat monitoring; and (iii) monitoring underwater explorations. Readers interested in these types of applications are referred to [12] for a more detailed description.
2.2. Underwater Exploration
- Davis and Chang present an overview of UWSNs in [13]. They provide a valuable survey of various UWSN architectures, and indicate how the architectures facilitate unmanned underwater exploration. As mentioned in this paper, a number of successful lost-treasure discoveries were made with the help of UWSNs.
- The objective of [17] is to develop advanced communication techniques for efficient real-time investigation of large uninhibited oceans. To explore the oceanic environment, the authors propose a large-scale system that uses UWSNs. In particular, to investigate the underwater resources, the proposed sensor modules are installed with video capturing devices. Accordingly, the proposed system can be used to discover and excavate the mineral resources underwater. The simulation results are encouraging as the proposed system is helpful in large-scale surveillance and exploration.
- Bainbridge et al. carried out a practical research [18] in Australia. The research reports on the lessons learned from two years of operation of UWSNs deployed at seven coral reefs along the Great Barrier Reef in north-eastern Australia. The authors emphasize that “cool technologies” should be used in an extremely careful way, and should never overshadow the basic process of collecting data; the key is to strike a balance between what actually works in an operational sense versus what is the latest and greatest.
2.3. Disaster Prevention
- In [19], Perez et al. introduce the design of a practical real-time measurement system for flood monitoring. They deployed a real-world monitoring network with several real-time measurement devices in Spain. The testing results show that the proposed monitoring system is energy efficient, and has the robust communication capability for long-term collection of water-level data in many locations.
- The authors in [20] emphasize that the development of the early warning generation system based on UWSNs would undoubtedly contribute to saving human beings. The warning generation system can help save human lives when a natural disaster, e.g., an earthquake, occurs. One of the main contributions of this paper is to point out the physical layer challenges in establishing a UWSN system for warning generation. The authors conclude that: (1) reliable communication; (2) low-power design; and (3) efficient resource management will remain the major challenges for the UWSN-based warning generation systems.
- In [21], the authors discuss a number of approaches for tsunami detection, and propose an efficient architecture for such applications. The proposed architecture uses seismic pressure sensors to predict tsunamis underwater, and to forward/relay the sensed information by using the directed diffusion routing protocol. The authors also discuss and describe the analysis and response mechanisms in this work.
2.4. Military
- For submarine detection, the authors in [22] investigate the design of the sensor deployment, and propose a scheme to optimize the monitoring coverage. By taking the water depth, transmission range, and attenuation into account, the proposed scheme uses Particle Swarm Optimization (PSO) to determine the positions of the sensor nodes. The authors provide both the mathematical analysis and NS3-based simulations to verify the performance of the proposed scheme in terms of the monitoring coverage and number of sensor nodes required.
- In [23], Khaledi et al. analyze the design of underwater mine detection systems. Specifically, they consider two sonar alternatives and five towing-vehicle alternatives (i.e., one underwater vehicle alternative, two surface vehicle alternatives, and two airborne vehicle alternatives). They use a computer model to simulate the process of detecting underwater mines, and test each of the design alternatives. The results show that the underwater vehicle alternative consumes the least amount of energy. They also take the safety, speed, fuel economy, and probability of detection into account, and provide the corresponding analysis to indicate the best alternative.
- In [24], the authors propose a novel UWSN architecture for underwater surveillance systems. In the proposed architecture, when sensor nodes are deployed, the sensor nodes are first placed in surface buoys; then, the sensor nodes are lowered to different depths. The depths are determined by the proposed scheme for maximizing the surveillance coverage. Moreover, each node is equipped with multiple different types (e.g., acoustic, magnetic, radiation and mechanical) of micro-sensors. Reading the data collected from the micro-sensors, the authors further present a data-mining-based scheme for classifying the submarines, mines, and divers.
2.5. Others
- The authors in [25] provide a systematic review, focusing on the biomechanical analysis of swimming by using the inertial sensors underwater. As mentioned in this paper, in recent years, the swimming athletes, coaches, and sport scientists have been working harder and harder to achieve a “fraction of a second” improvement. The use of sensors plays an important role in supporting performance enhancement from a biomechanical point of view. This paper introduces numerous existing methods that use wearable inertial sensors (including accelerometers, gyroscopes, and magnetometers) to assess the biomechanics of swimming performance. The results indicate that the underwater inertial sensors are suitable and reliable tools for swimming biomechanical analyses.
- As highlighted in [26], for a variety of applications, the sensed data can only be interpreted meaningfully when referenced to the location of the sensors; for example, navigation is such an application. The authors propose a multi-stage AUV-aided localization scheme for UWSNs. They conducted simulations to evaluate the performance of the proposed scheme in terms of the localization coverage, accuracy, and communication costs. The results indicate that good performance can be achieved by properly choosing the communication range.
- In [27], the authors propose an Anchor-Free Localization Algorithm, called AFLA, for underwater environments. Most of the traditional underwater localization algorithms assume that special underwater nodes (with special equipment) or AUVs can be used as “anchor nodes” to help identify the location underwater. The proposed AFLA does not need information from the special anchor nodes. Instead, AFLA uses the adjacent relationship of normal sensor nodes to identify the location underwater. The simulation results indicate that AFLA can be used in both the static and dynamic UWSNs.
3. Challenges
- Transmission Media: In TWSNs, radio waves are often used for communications. However, UWSNs usually rely on acoustic communications rather than radio communications. This is because radio signals would be absorbed by water very quickly. Unfortunately, the properties of the acoustic waves are very different from those of the radio waves; subsequently, many of the communications protocols applied to TWSNs cannot be directly applied to UWSNs. Accordingly, the transmission media is one of the main challenges for IoUT.
- Propagation Speed: The propagation speed in UWSNs is around 200,000 times slower than that in TWSNs. Specifically, the propagation speed of TWSN radio channels is 300,000,000 m/s, while the propagation speed of UWSN acoustic channels is only around 1500 m/s. Thus, guaranteeing bounded end-to-end delay would be a challenging issue for IoUT.
- Transmission Range: The transmission range of UWSNs could be ten times longer than that of TWSNs. In underwater environments, to avoid being absorbed by water, signals need to be transmitted by using low frequency. Lower frequency implies longer transmission range; and longer transmission range implies more possibilities that interferences and collisions happen during data transmission. Therefore, prevention of interferences and collisions is regarded as one of the challenges for IoUT.
- Transmission Rate: Compared with radio communications in TWSNs, acoustic communications in UWSNs use a narrow bandwidth. Owing to the narrow bandwidth, the transmission rate in UWSNs is generally very low (approximately 10 kbps). Hence, bandwidth utilization is an important concern for IoUT.
- Difficulty to Recharge: In UWSNs, underwater sensors are difficult to recharge because the sensors are deployed in the underwater areas. When we consider potential cost of recharging the batteries of the underwater sensors, it is clear that energy efficiency would be another important concern for IoUT.
- Mobility: UWSNs are mobile WSNs by nature. When there are water currents, the UWSN sensors may move and suffer from dynamic network topology changes. It is a challenging task to deal with the dynamic changes for IoUT.
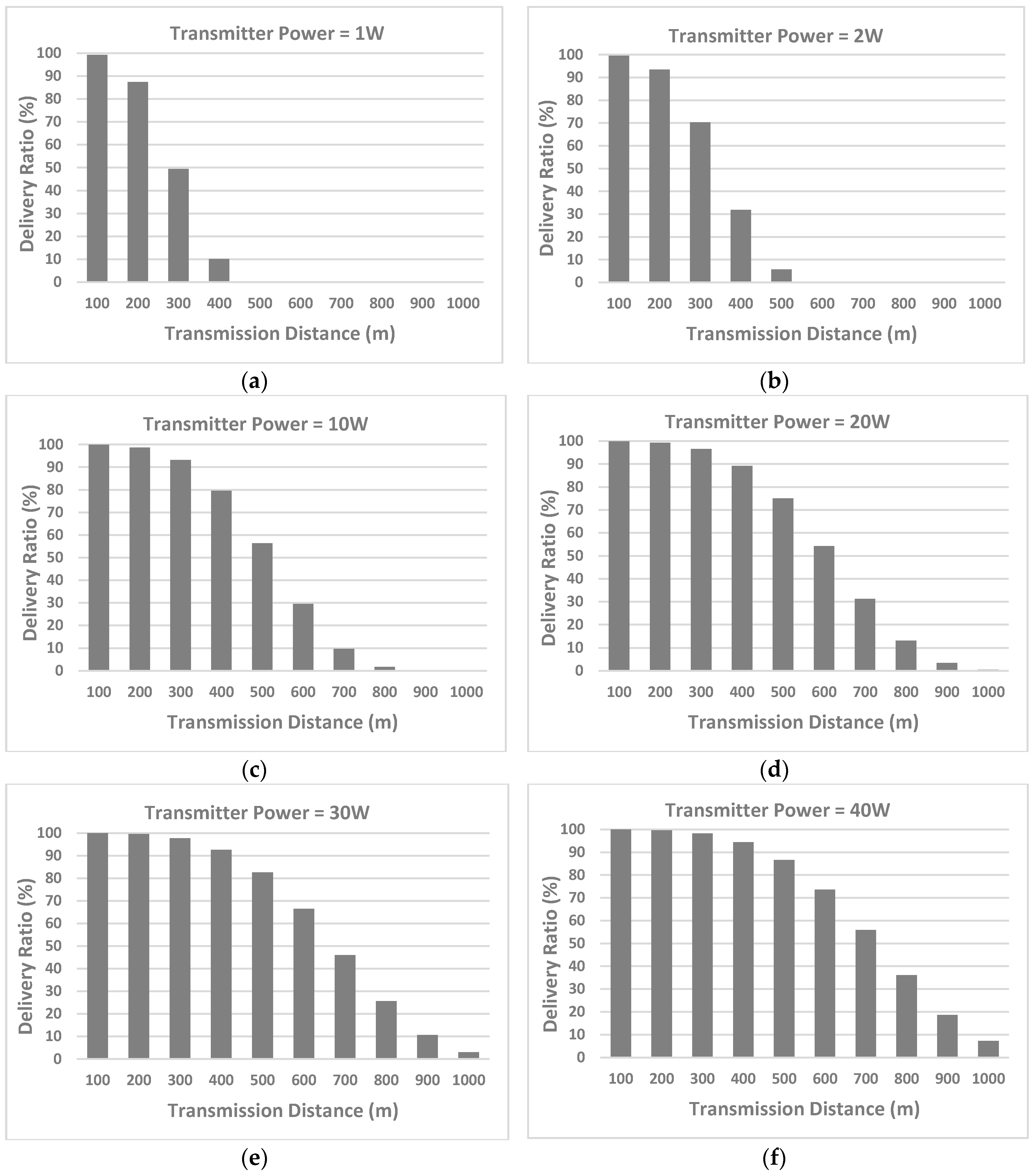
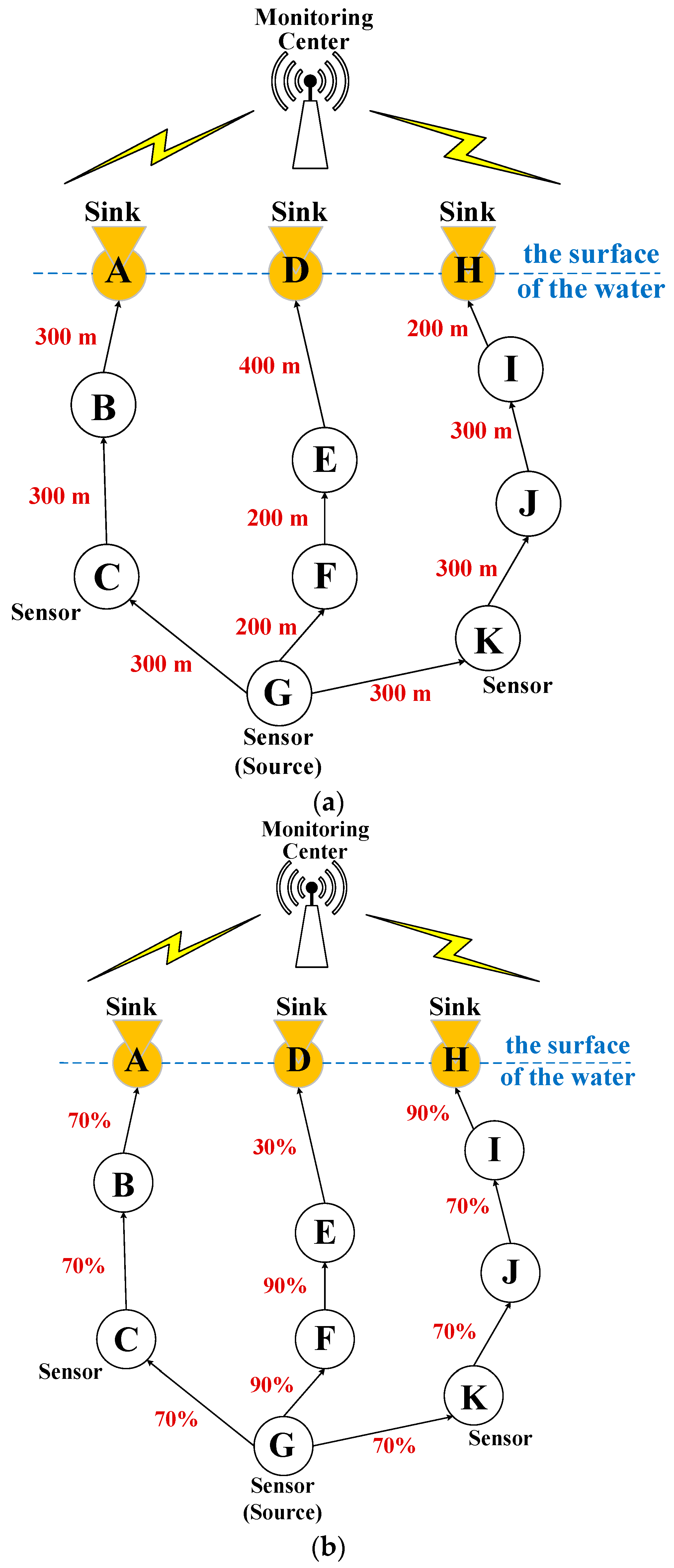
- Reliability: The link reliability in UWSNs is typically unstable and low. The reliability of a link means the successful delivery ratio (successful delivery ratio is defined as the ratio of the number of data that have been successfully delivered to a receiver compared to the number of data that have been sent out by the sender) between a pair of sensor nodes. In UWSNs, the successful delivery ratio would be severely affected by the transmission loss (Transmission loss is defined as the accumulated decrease in intensity of a waveform energy (e.g., the sound wave energy in this paper) when a wave propagates outwards from a source (e.g., from a sensor node in this paper)) and environmental noises. Because signals would be absorbed by water in underwater environments, the transmission loss is one of the severe problems in UWSNs. Furthermore, the environmental noises in UWSNs are composed of several complicated factors, including turbulence, shipping, waves, etc. As a result, the reliability issue is one of the most challenging issues for IoUT.
4. Channel Models
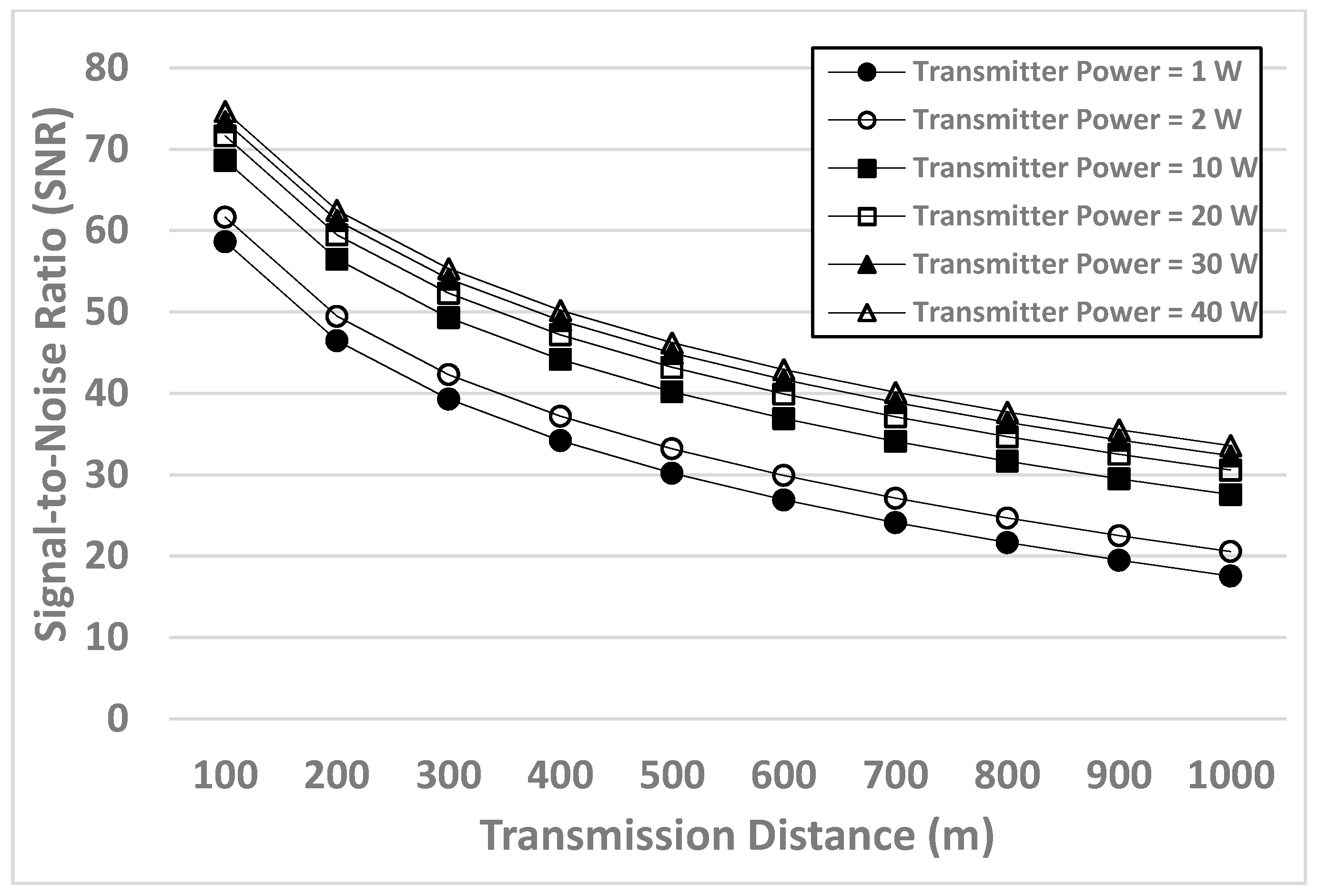
4.1. Relationship between the Transmitter Power and SNR
4.2. Relationship between the SNR and Successful Delivery Ratio
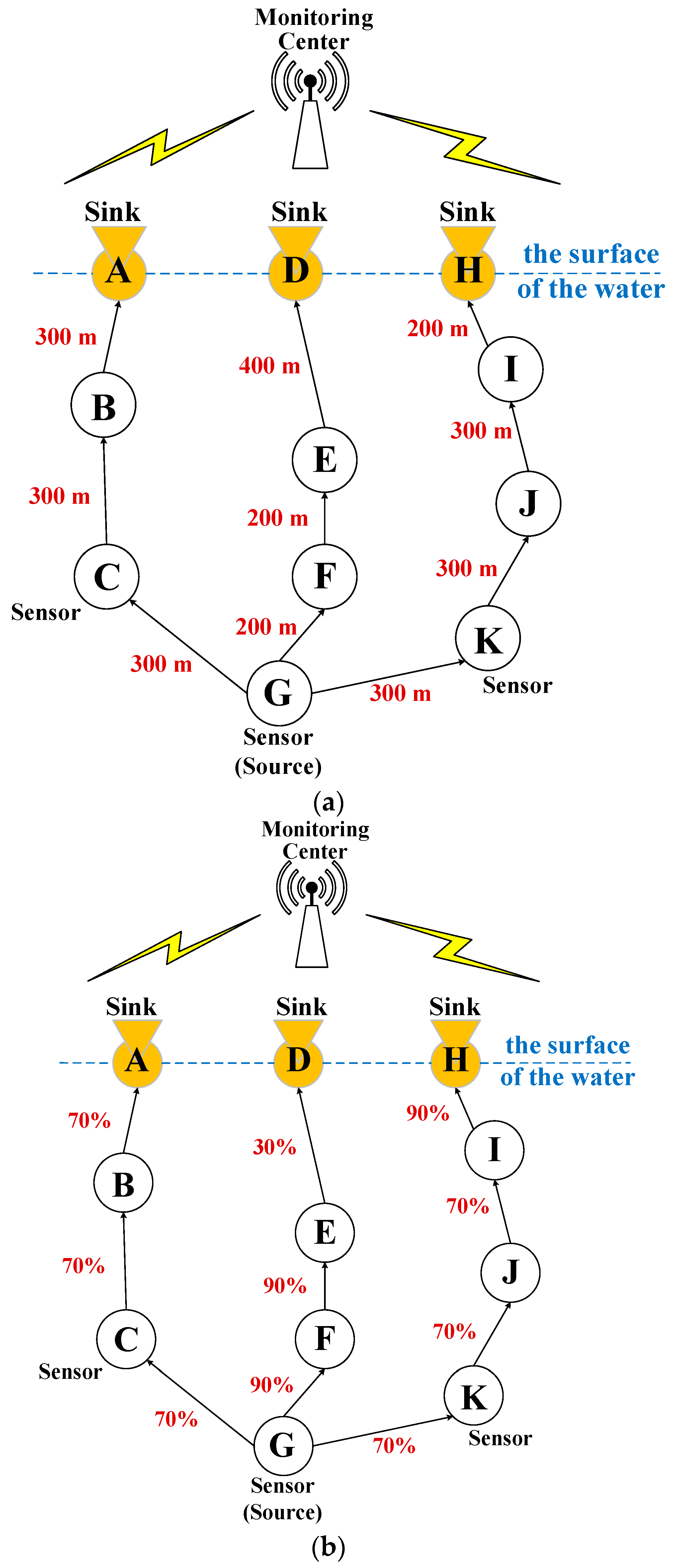
4.3. Example
5. Results
5.1. Simulation Environment
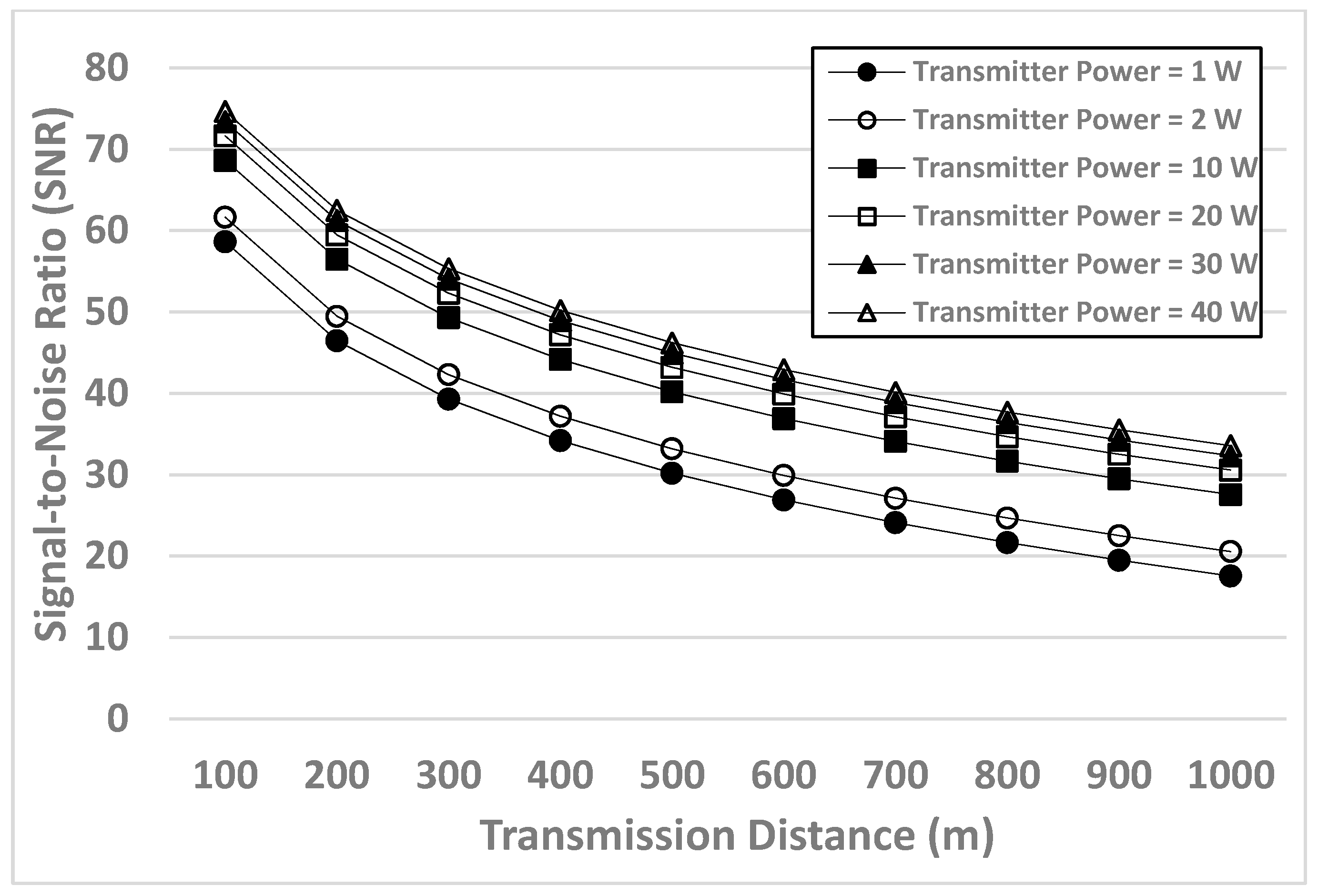
5.2. Evaluation of the Signal-to-Noise Ratio (SNR)
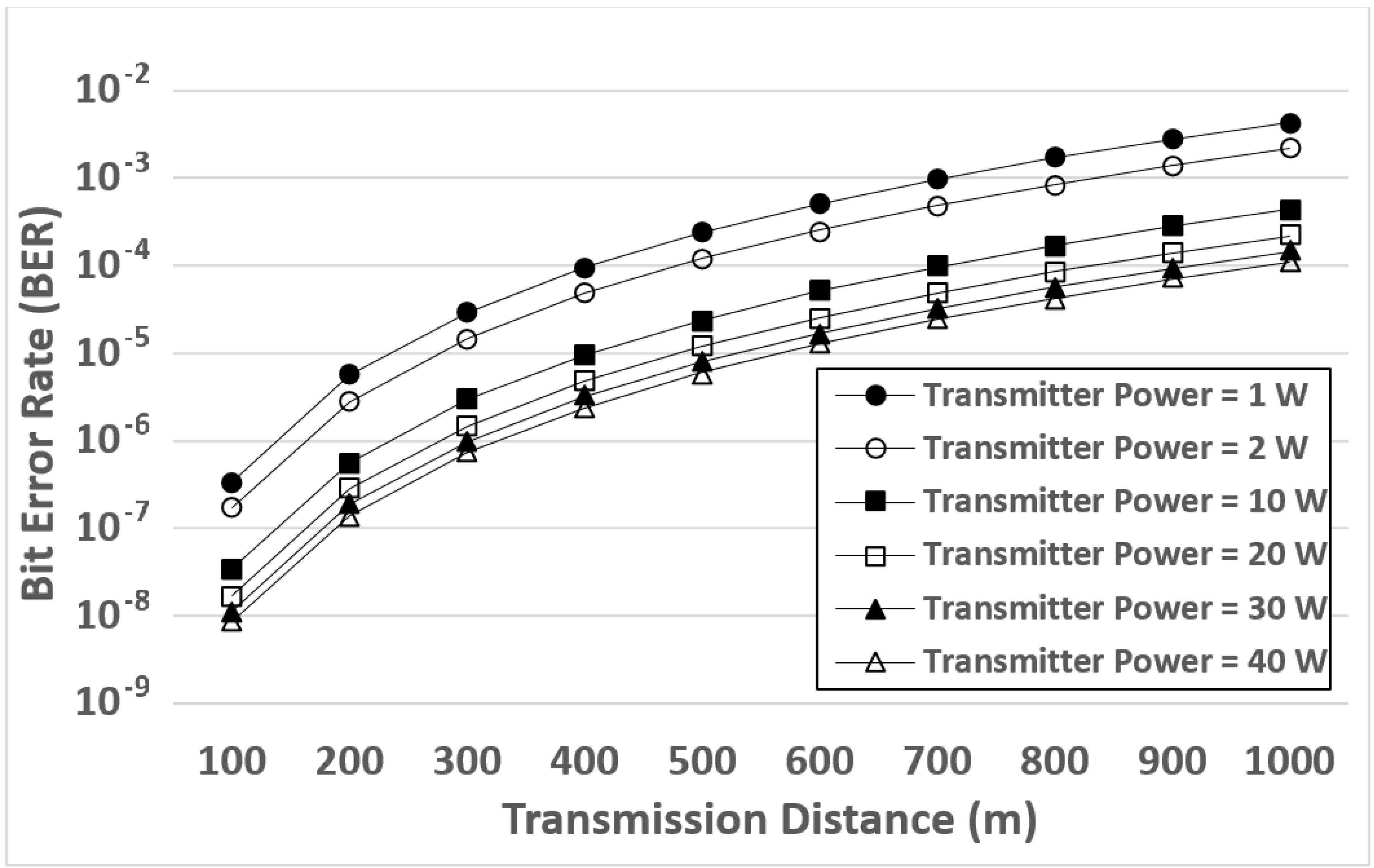
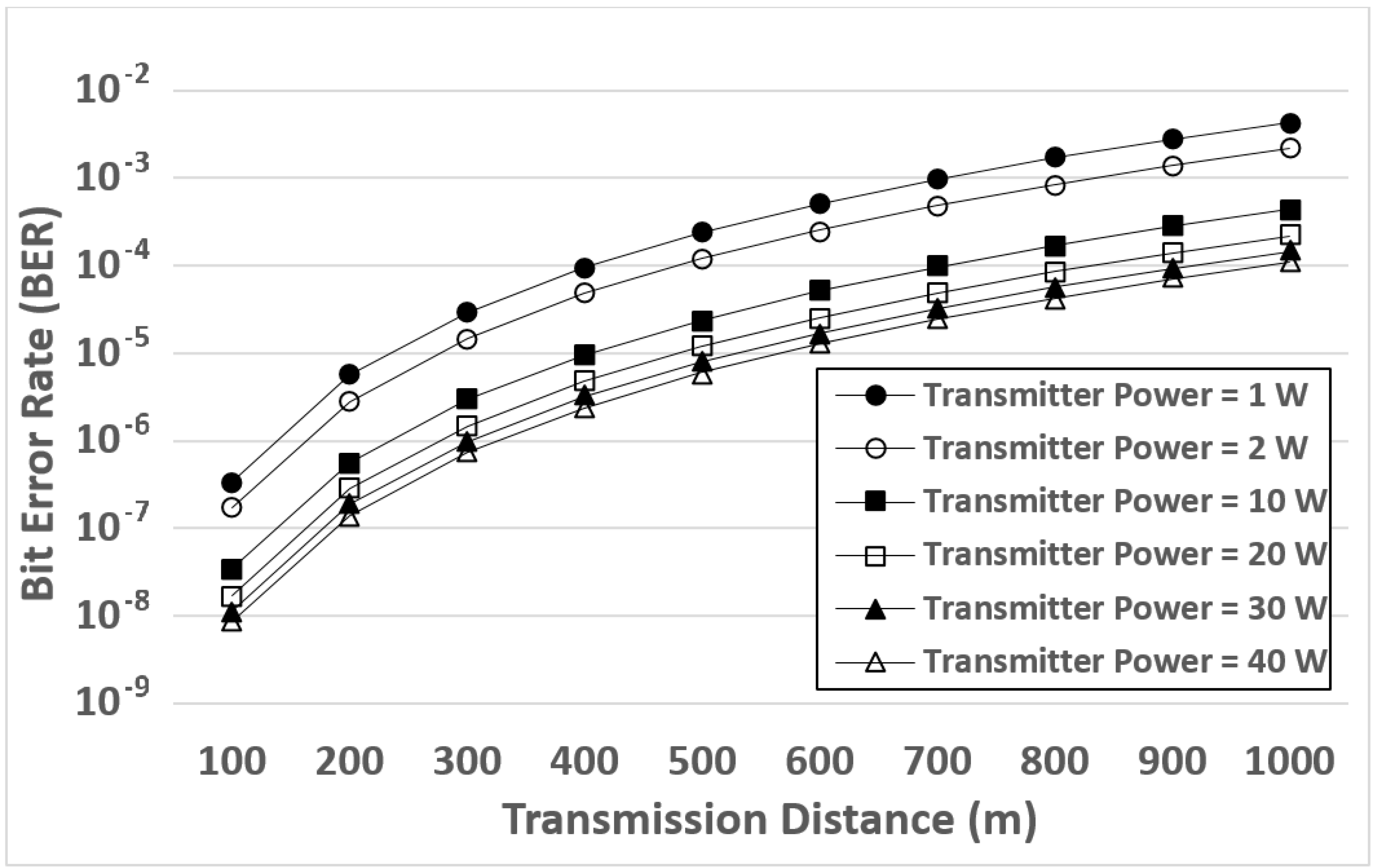
5.3. Evaluation of the Bit Error Rate (BER)
5.4. Evaluation of the Successful Delivery Ratio (Reliability)
6. Discussion
7. Related Work
- In [4], the research effort has focused on the MAC-layer packet scheduling for IoUT. Considering the design challenges of MAC protocols, the authors presented an Energy-Aware scheduling with Spatial-Temporal reuse (EAST) protocol for IoUT. The authors mentioned the design challenges of the IoUT MAC protocols, including: (1) sensor network lifetime; (2) acoustic channel utilization; and (3) packet loss problems. EAST utilizes the information of data buffer and traffic load to switch the energy modes (i.e., the listen and sleep mode) of underwater sensor nodes, and thereby achieves both high energy efficiency and high channel utilization.
- In [5], the authors concentrated on the network-layer routing protocol for IoUT. Considering the IoUT challenges of data transmission and of energy efficiency, the authors proposed an Enhanced Channel-Aware Routing Protocol (E-CARP) for IoUT. E-CARP exploits the greedy strategy to deliver packets hop-by-hop. Specifically, E-CARP simplifies the relay-node selection method and reduces control packets, and thereby reduces the communication cost and energy consumption. As a result, E-CARP can reserve energy and lengthen the lifetime of the underwater sensor system for IoUT.
- In [6], the study focused on the design and implementation of the smart-city IoUT system. The authors proposed the Smart Environment Monitoring and Analytics in Real-time system (SEMAR). SEMAR is a combination of water quality monitoring system, coral reef monitoring system, wireless mesh network system, and Big Data system. SEMAR collects data by using the underwater sensors, remotely operated vehicles (ROVs), and underwater cameras. The collected data would be delivered to the monitoring center. For data processing (in the monitoring center), the authors point out that using Hadoop Distributed File Systems (HDFS) can perform better than using SQL systems, especially in the cases of processing large/huge amounts of data.
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- ITU-T IoT-GSI. Internet of Things Global Standards Initiative. Available online: http://www.itu.int/en/ITU-T/gsi/iot/Pages/default.aspx (accessed on 21 June 2017).
- Sharma, C. Correcting the IoT History. Available online: http://www.chetansharma.com/correcting-the-iot-history/ (accessed on 21 June 2017).
- Domingo, M.C. An overview of the internet of underwater things. J. Netw. Comput. Appl. 2012, 35, 1879–1890. [Google Scholar] [CrossRef]
- Xu, M.; Liu, L. Sender-receiver role-based energy-aware scheduling for Internet of Underwater Things. IEEE Trans. Emerg. Top. Comput. 2016. [Google Scholar] [CrossRef]
- Zhou, Z.; Yao, B.; Xing, R.; Shu, L.; Bu, S. E-CARP: An energy efficient routing protocol for UWSNs in the internet of underwater things. IEEE Sens. J. 2016, 16, 4072–4082. [Google Scholar] [CrossRef]
- Berlian, M.H.; Sahputra, T.E.R.; Ardi, B.J.W.; Dzatmika, L.W.; Besari, A.R.A.; Sudibyo, R.W.; Sukaridhoto, S. Design and implementation of smart environment monitoring and analytics in real-time system framework based on internet of underwater things and big data. In Proceedings of the IEEE International Electronics Symposium (IES), Bali, Indonesia, 29–30 September 2016. [Google Scholar]
- Fang, S.; Xu, L.D.; Zhu, Y.; Ahati, J.; Pei, H.; Yan, J.; Liu, Z. An integrated system for regional environmental monitoring and management based on internet of things. IEEE Trans. Ind. Inform. 2014, 10, 1596–1605. [Google Scholar] [CrossRef]
- Petrioli, C.; Petroccia, R.; Potter, J.R.; Spaccini, D. The SUNSET framework for simulation, emulation and at-sea testing of underwater wireless sensor networks. Ad Hoc Netw. 2015, 34, 224–238. [Google Scholar] [CrossRef]
- Martins, R.; Sousa, J.B.; Caldas, R.; Petrioli, C.; Potter, J. SUNRISE project: Porto university testbed. In Proceedings of the IEEE Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014. [Google Scholar]
- Petrioli, C.; Petroccia, R. SUNSET: Simulation, emulation and real-life testing of underwater wireless sensor networks. In Proceedings of the IEEE Underwater Communications and Networking (UComms), Sestri Levante, Italy, 12–14 September 2012. [Google Scholar]
- Petrioli, C.; Petroccia, R.; Spaccini, D. SUNSET version 2.0: Enhanced framework for simulation, emulation and real-life testing of underwater wireless sensor networks. In Proceedings of the ACM International Conference on Underwater Networks and Systems (WUWNet), Kaohsiung, Taiwan, 11–13 November 2013. [Google Scholar]
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef]
- Davis, A.; Chang, H. Underwater wireless sensor networks. In Proceedings of the IEEE OCEANS, Virginia Beach, VA, USA, 14–19 October 2012. [Google Scholar]
- Lloret, J. Underwater sensor nodes and networks. Sensors 2013, 13, 11782–11796. [Google Scholar] [CrossRef] [PubMed]
- Menon, K.A.U.; Divya, P.; Ramesh, M.V. Wireless sensor network for river water quality monitoring in India. In Proceedings of the IEEE International Conference on Computing, Communication and Networking Technologies (ICCCNT), Tamilnadu, India, 26–28 July 2012. [Google Scholar]
- Saeed, H.; Ali, S.; Rashid, S.; Qaisar, S.; Felemban, E. Reliable monitoring of oil and gas pipelines using wireless sensor network (WSN): REMONG. In Proceedings of the IEEE International Conference on System of Systems Engineering (SOSE), Adelaide, Australia, 9–13 June 2014. [Google Scholar]
- Srinivas, S.; Ranjitha, P.; Ramya, R.; Narendra, K.G. Investigation of oceanic environment using large-scale UWSN and UANETs. In Proceedings of the IEEE International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM), Shanghai, China, 21–23 September 2012. [Google Scholar]
- Bainbridge, S.; Eggeling, D.; Page, G. Lessons from the field—Two years of deploying operational wireless sensor networks on the great barrier reef. Sensors 2011, 11, 6842–6855. [Google Scholar] [CrossRef] [PubMed]
- Perez, R.M.; Pintado, J.G.; Gómez, A.S. A real-time measurement system for long-life flood monitoring and warning applications. Sensors 2012, 12, 4213–4236. [Google Scholar] [CrossRef] [PubMed]
- Kumar, P.; Kumar, P.; Priyadarshini, P.; Srija. Underwater acoustic sensor network for early warning generation. In Proceedings of the IEEE OCEANS, Virginia Beach, VA, USA, 14–19 October 2012. [Google Scholar]
- Casey, K.; Lim, A.; Dozier, G. A sensor network architecture for tsunami detection and response. Int. J. Distrib. Sens. Netw. 2008, 4, 27–42. [Google Scholar] [CrossRef]
- Manjula, R.B.; Manvi, S.S. Coverage optimization based sensor deployment by using PSO for anti-submarine detection in UWASNs. In Proceedings of the International Symposium on Ocean Electronics, Athani, India, 23–25 October 2013. [Google Scholar]
- Khaledi, S.; Mann, H.; Perkovich, J.; Zayed, S. Design of an underwater mine detection system. In Proceedings of the IEEE Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 25 April 2014. [Google Scholar]
- Cayirci, E.; Tezcan, H.; Dogan, Y.; Coskun, V. Wireless sensor networks for underwater surveillance systems. Ad Hoc Netw. 2006, 4, 431–446. [Google Scholar] [CrossRef]
- Magalhaes, F.A.; Vannozzi, G.; Gatta, G.; Fantozzi, S. Wearable inertial sensors in swimming motion analysis: A systematic review. J. Sports Sci. 2015, 33, 732–745. [Google Scholar] [CrossRef] [PubMed]
- Waldmeyer, M.; Tan, H.P.; Seah, W.K.G. Multi-stage AUV-aided localization for underwater wireless sensor networks. In Proceedings of the IEEE Workshops of Advanced Information Networking and Applications (WAINA), Biopolis, Singapore, 22–25 March 2011. [Google Scholar]
- Guo, Y.; Liu, Y. Localization for anchor-free underwater sensor networks. Comput. Electr. Eng. 2013, 39, 1812–1821. [Google Scholar] [CrossRef]
- Khan, A.; Jenkins, L. Undersea wireless sensor network for ocean pollution prevention. In Proceedings of the IEEE International Conference on Communication Systems Software and Middleware (COMSWARE), Bangalore, India, 6–10 January 2008. [Google Scholar]
- Alippi, C.; Camplani, R.; Galperti, C.; Roveri, M. A robust adaptive solar-powered WSN framework for aquatic environmental monitoring. IEEE Sens. J. 2011, 11, 45–55. [Google Scholar] [CrossRef]
- Shyan, C.Y.; Ying, J.T.; Wei, L.Y.; Che, T.I. A low propagation delay multi-path routing protocol for underwater sensor networks. J. Int. Technol. 2010, 11, 153–165. [Google Scholar]
- Noh, Y.; Lee, U.; Han, S.; Wang, P.; Torres, D.; Kim, J.; Gerla, M. DOTS: A propagation delay-aware opportunistic MAC protocol for mobile underwater networks. IEEE Trans. Mob. Comput. 2014, 13, 766–782. [Google Scholar] [CrossRef]
- Gao, C.; Liu, Z.; Cao, B.; Mu, L. Relay selection scheme based on propagation delay for cooperative underwater acoustic network. In Proceedings of the IEEE International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 24–26 October 2013. [Google Scholar]
- Chen, Y.D.; Liu, S.S.; Chang, C.M.; Shih, K.P. CS-MAC: A Channel Stealing MAC protocol for improving bandwidth utilization in underwater wireless acoustic networks. In Proceedings of the IEEE OCEANS, Waikoloa, HI, USA, 19–22 September 2011. [Google Scholar]
- Liao, Z.; Li, D.; Chen, J. Joint bandwidth optimization and media access control for multihop underwater acoustic sensor networks. IEEE Sens. J. 2015, 15, 4292–4304. [Google Scholar] [CrossRef]
- Fahim, H.; Javaid, N.; Qasim, U.; Khan, Z.A.; Javed, S.; Hayat, A.; Iqbal, Z.; Rehman, G. Interference and bandwidth aware depth based routing protocols in underwater WSNs. In Proceedings of the IEEE International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS), Blumenau, Brazil, 8–10 July 2015. [Google Scholar]
- Xu, J.; Li, K.; Min, G.; Lin, K.; Qu, W. Energy-efficient tree-based multipath power control for underwater sensor networks. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 2107–2116. [Google Scholar] [CrossRef]
- Wahid, A.; Lee, S.; Kim, D. A reliable and energy-efficient routing protocol for underwater wireless sensor networks. Int. J. Commun. Syst. 2014, 27, 2048–2062. [Google Scholar] [CrossRef]
- Shah, M.; Javaid, N.; Tariq, S.; Imran, M.; Alnuem, M. A balanced energy consumption protocol for underwater ASNs. In Proceedings of the IEEE International Conference on Network-Based Information Systems (NBIS), Taipei, Taiwan, 2–4 September 2015. [Google Scholar]
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater acoustic wireless sensor networks: Advances and future trends in physical, MAC and routing layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Darehshoorzadeh, A.; Boukerche, A. Underwater sensor networks: A new challenge for opportunistic routing protocols. IEEE Commun. Mag. 2015, 53, 98–107. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Bao, N.; Wan, L.; Guizani, M. Routing protocols for underwater wireless sensor networks. IEEE Commun. Mag. 2015, 53, 72–78. [Google Scholar] [CrossRef]
- Chen, K.; Ma, M.; Cheng, E.; Yuan, F.; Su, W. A survey on MAC protocols for underwater wireless sensor networks. IEEE Commun. Surv. Tutor. 2014, 16, 1433–1447. [Google Scholar] [CrossRef]
- Menon, V.G.; Prathap, J.P.M. Comparative Analysis of Opportunistic Routing Protocols for Underwater Acoustic Sensor Networks. In Proceedings of the IEEE International Conference on Emerging Technological Trends (ICETT), Kerala, India, 21–22 October 2016. [Google Scholar]
- Jurdak, R.; Lopes, C.V.; Baldi, P. Battery lifetime estimation and optimization for underwater sensor networks. IEEE Sens. Netw. Oper. 2004, 2006, 397–420. [Google Scholar]
- National Physical Laboratory (NPL). Underwater Acoustics Concepts—Source Levels (SL). Available online: http://resource.npl.co.uk/acoustics/techguides/concepts/sl.html (accessed on 21 June 2017).
- Forming the Acoustic Equations. Available online: http://www.fao.org/docrep/X5818E/x5818e05.htm (accessed on 21 June 2017).
- Yang, H.; Liu, B.; Ren, F.; Wen, H.; Lin, C. Optimization of energy efficient transmission in underwater sensor networks. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM), Honolulu, HI, USA, 30 November–4 December 2009. [Google Scholar]
- Stojanovic, M. On the relationship between capacity and distance in an underwater acoustic communication channel. In Proceedings of the ACM International Workshop on Underwater Networks (WUWNet), Los Angeles, CA, USA, 25 September 2006. [Google Scholar]
- Noh, Y.; Lee, U.; Wang, P. Pressure routing for underwater sensor networks. In Proceedings of the IEEE INFOCOM, San Diego, CA, USA, 15–19 March 2010. [Google Scholar]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- SoundLink Underwater Acoustic Modems. Available online: http://www.link-quest.com/ (accessed on 21 June 2017).
- Xu, J.; Li, K.; Min, G. Reliable and energy-efficient multipath communications in underwater sensor networks. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 1326–1335. [Google Scholar] [CrossRef]
- Jiang, J.; Han, G.; Guo, H.; Shu, L.; Rodrigues, J.J.P.C. Geographic multipath routing based on geospatial division in duty-cycled under water wireless sensor networks. J. Netw. Comput. Appl. 2016, 59, 4–13. [Google Scholar] [CrossRef]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Stojanovic, M. Optimized Packet Size Selection in Underwater Wireless Sensor Network Communications. IEEE J. Ocean. Eng. 2012, 37, 321–337. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | TWSNs | UWSNs |
|---|---|---|
| Transmission Media | Radio Wave | Sound Wave |
| Propagation Speed | 300,000,000 m/s | 1500 m/s |
| Transmission Range | 10 m–100 m | 100 m–10,000 m |
| Transmission Rate | ~250 kbps | ~10 kbps |
| Difficulty to Recharge | Depend on Applications | Difficult |
| Mobility (of Nodes) | Depend on Applications | High |
| Reliability (of Links) | Depend on Applications | Low |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kao, C.-C.; Lin, Y.-S.; Wu, G.-D.; Huang, C.-J. A Comprehensive Study on the Internet of Underwater Things: Applications, Challenges, and Channel Models. Sensors 2017, 17, 1477. https://doi.org/10.3390/s17071477
Kao C-C, Lin Y-S, Wu G-D, Huang C-J. A Comprehensive Study on the Internet of Underwater Things: Applications, Challenges, and Channel Models. Sensors. 2017; 17(7):1477. https://doi.org/10.3390/s17071477
Chicago/Turabian StyleKao, Chien-Chi, Yi-Shan Lin, Geng-De Wu, and Chun-Ju Huang. 2017. "A Comprehensive Study on the Internet of Underwater Things: Applications, Challenges, and Channel Models" Sensors 17, no. 7: 1477. https://doi.org/10.3390/s17071477
APA StyleKao, C.-C., Lin, Y.-S., Wu, G.-D., & Huang, C.-J. (2017). A Comprehensive Study on the Internet of Underwater Things: Applications, Challenges, and Channel Models. Sensors, 17(7), 1477. https://doi.org/10.3390/s17071477