Intercomparison of Unmanned Aerial Vehicle and Ground-Based Narrow Band Spectrometers Applied to Crop Trait Monitoring in Organic Potato Production

 ,
, 
 and
and 
Abstract
:1. Introduction
2. Materials and Methods
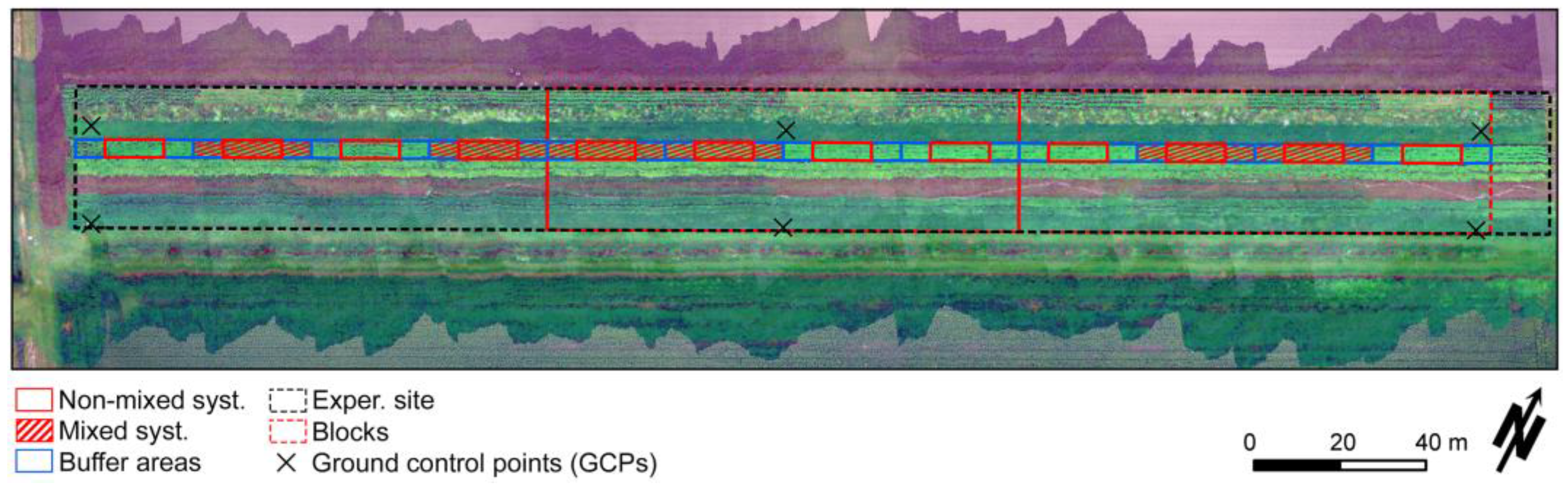
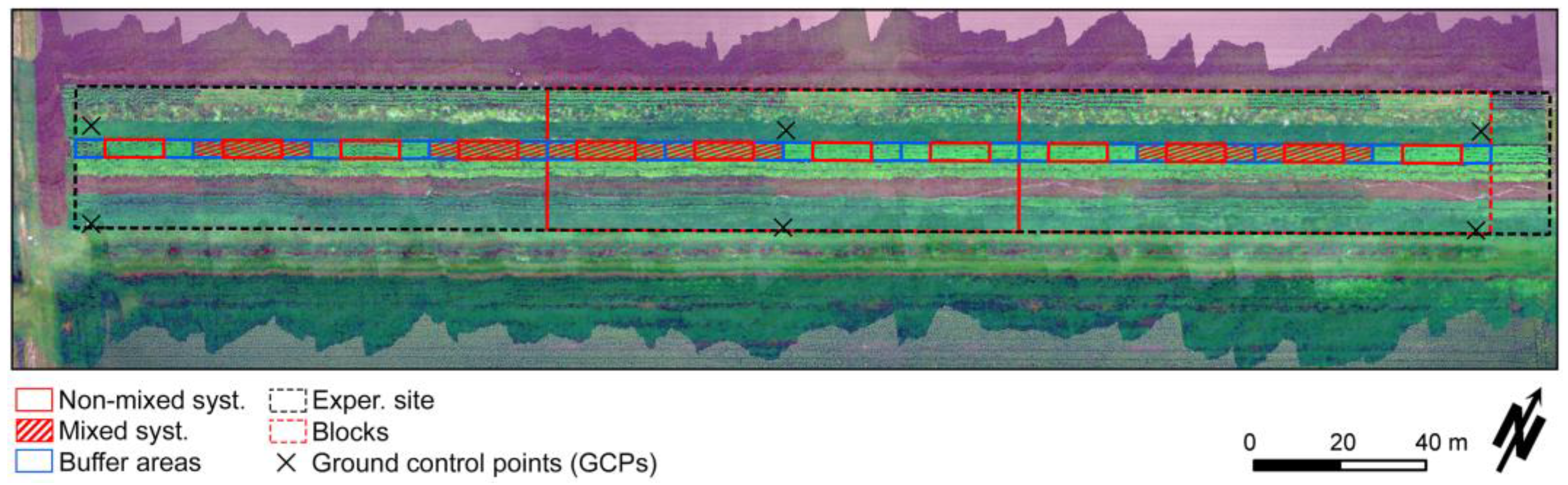
2.1. Study Site
2.2. UAV-Based Hyperspectral Data Acquisition and Processing
2.3. Spectra Extraction from Hyperspectral Images
2.4. Ground-Based Spectral Measurements
2.5. Chlorophyll Content at Leaf and Canopy Levels
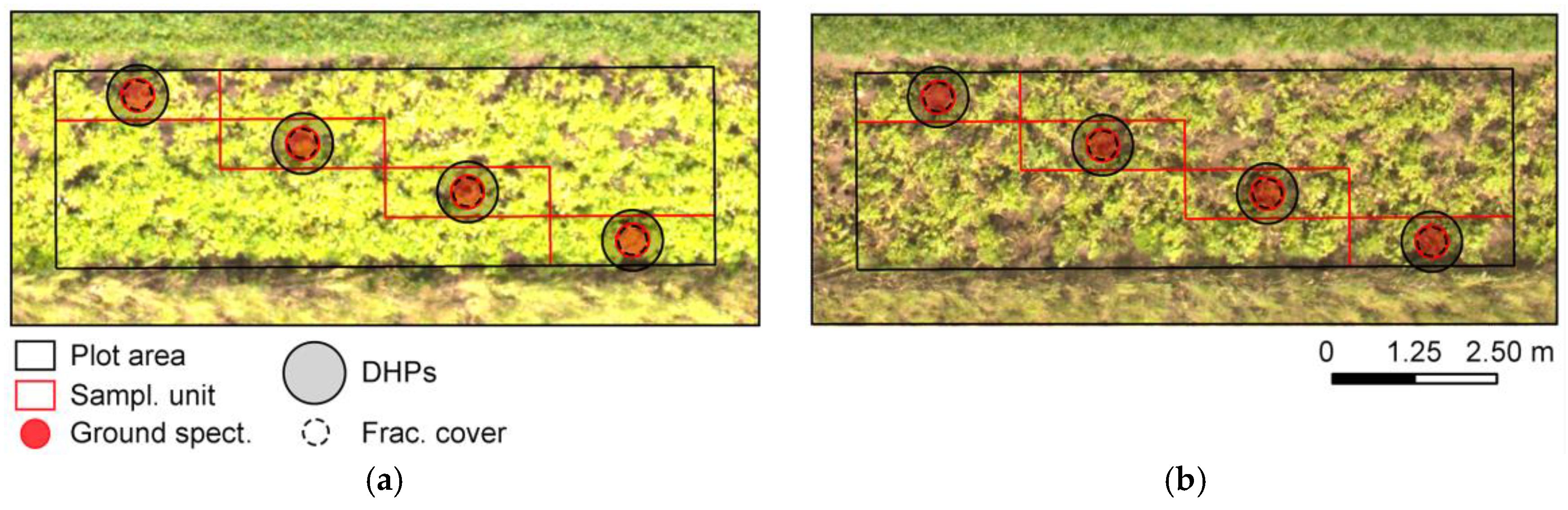
2.6. Leaf Area Index and Ground Cover
2.7. Vegetation Indices
2.8. Crop Traits Modelling and Intercomparison of Different Spectral Acquisition Levels
3. Results
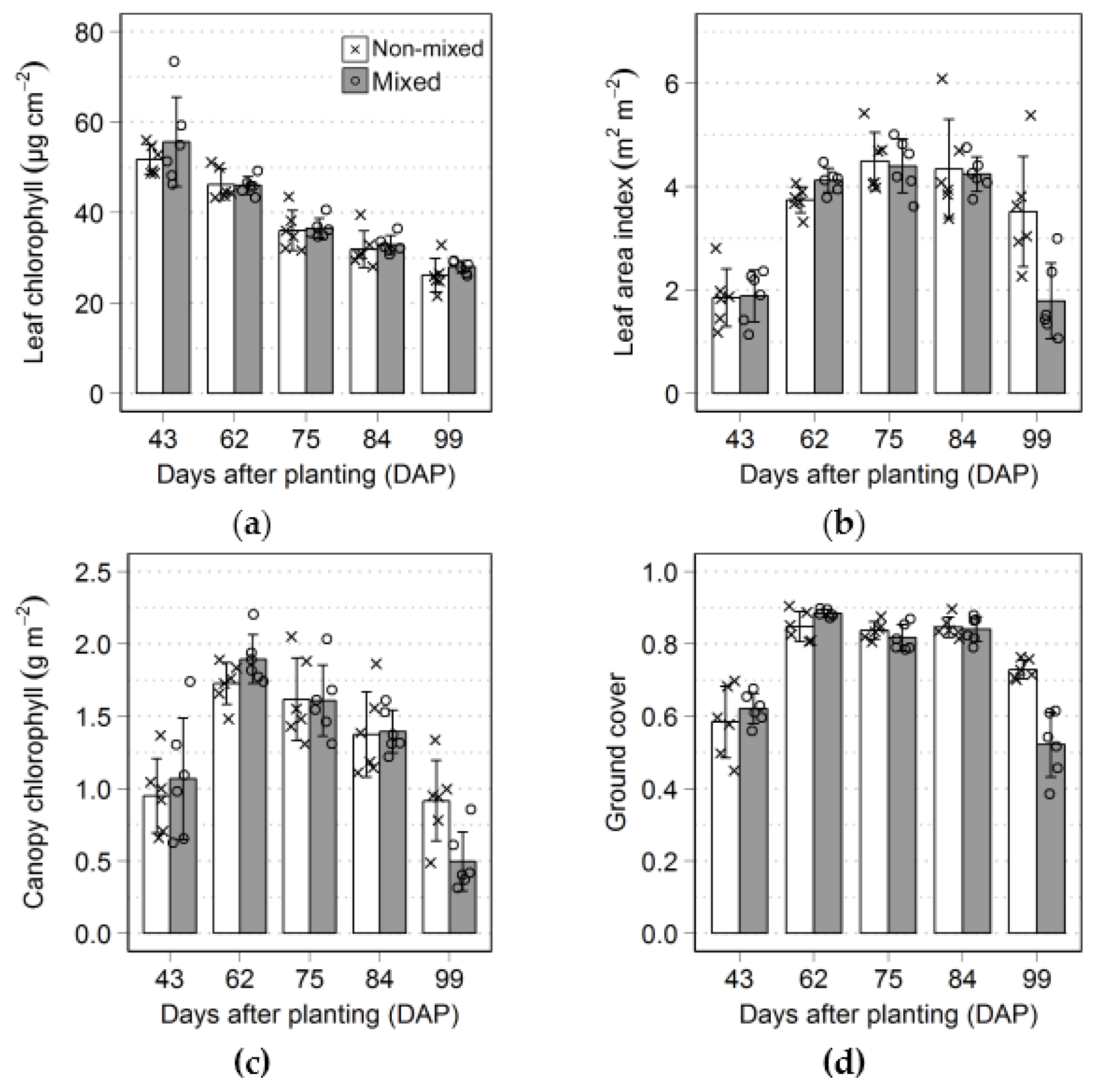
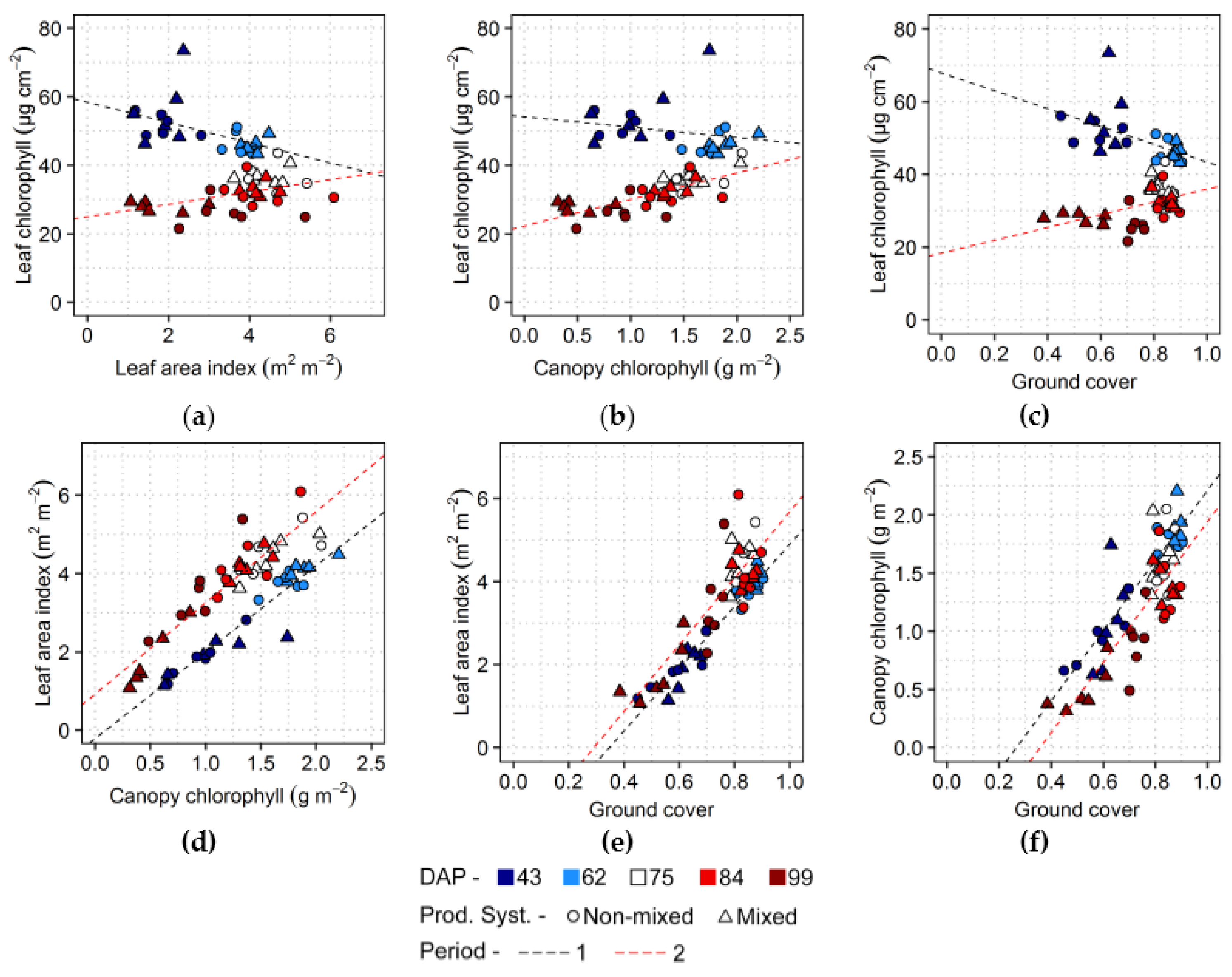
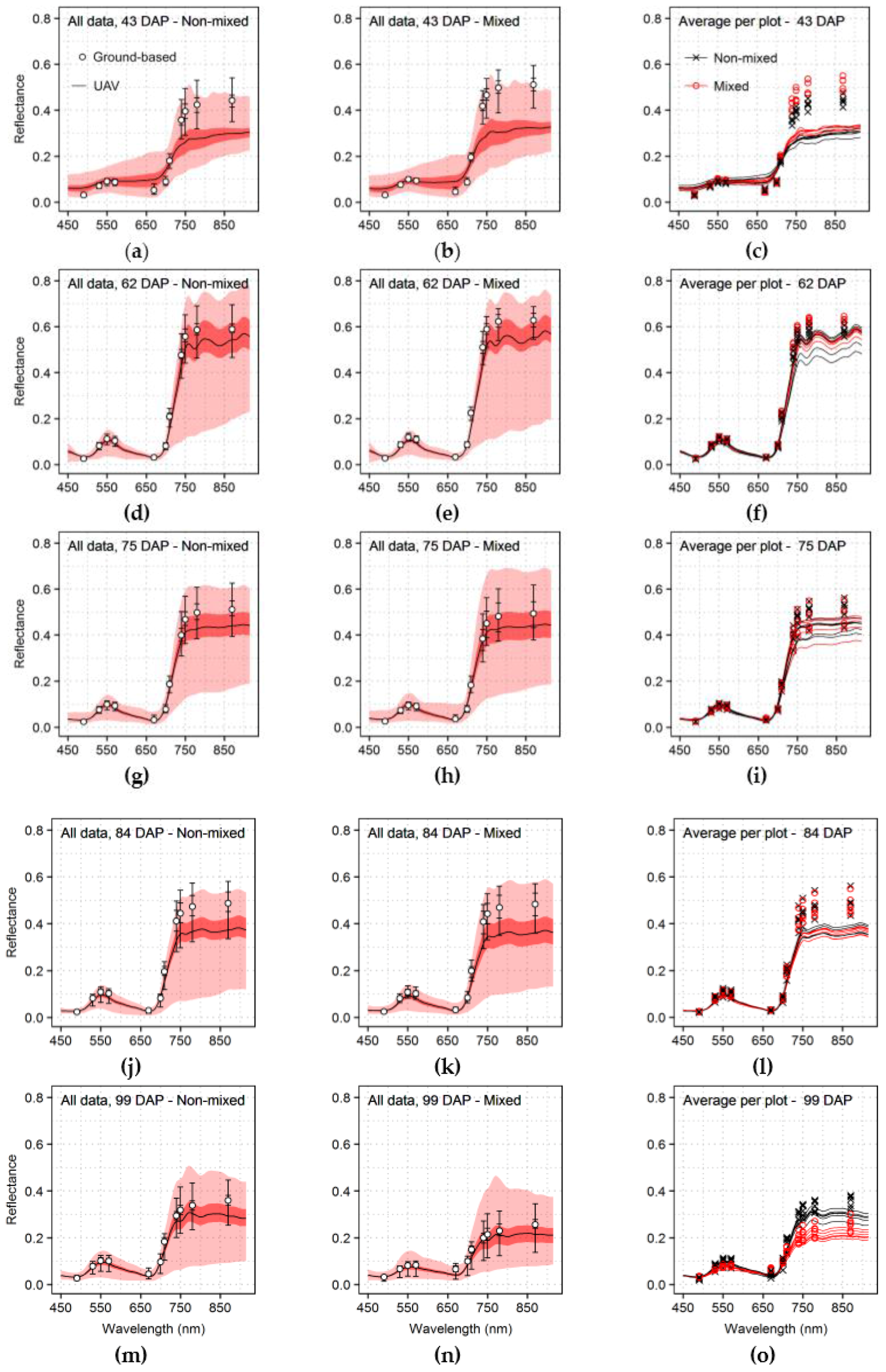
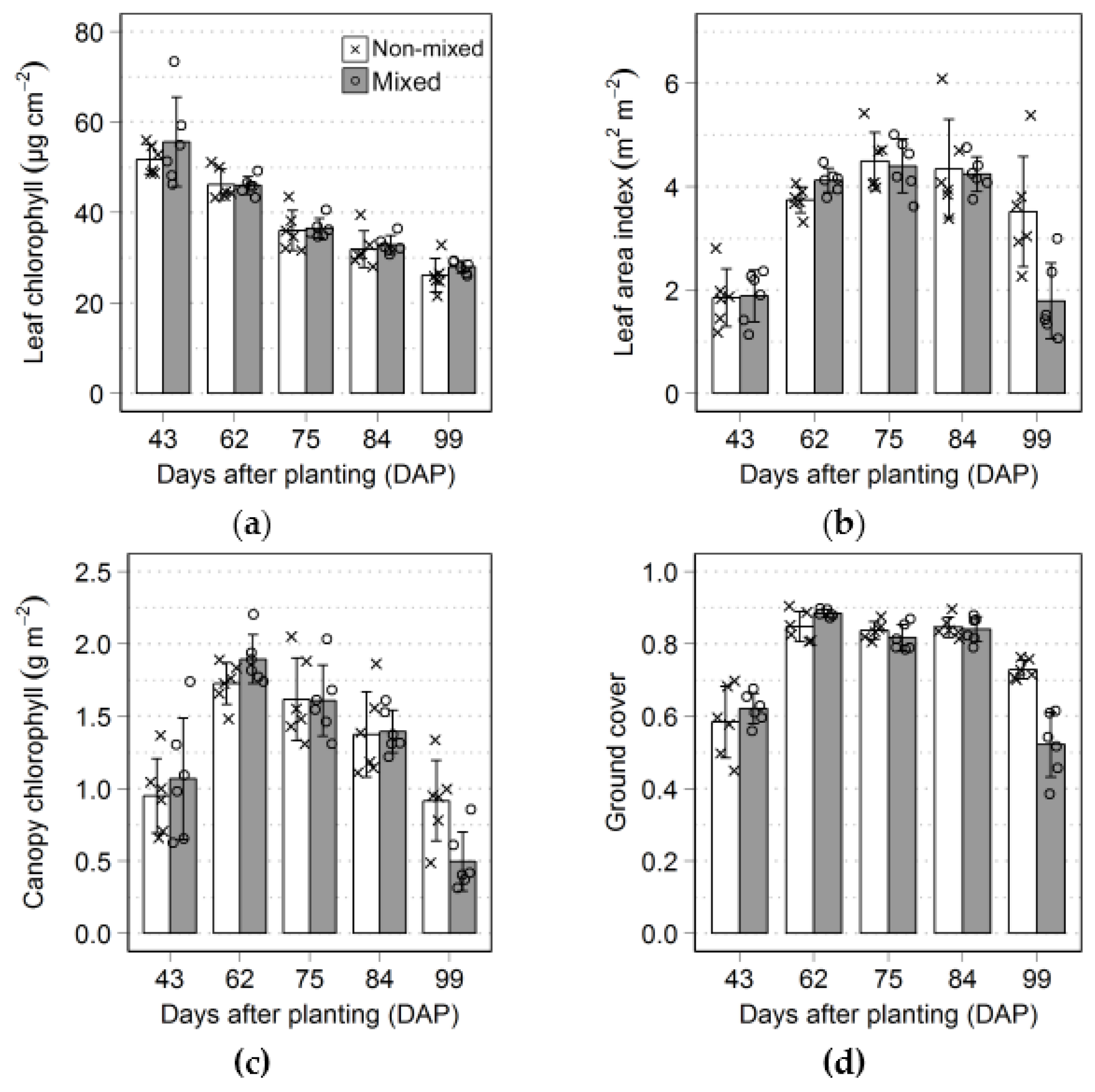
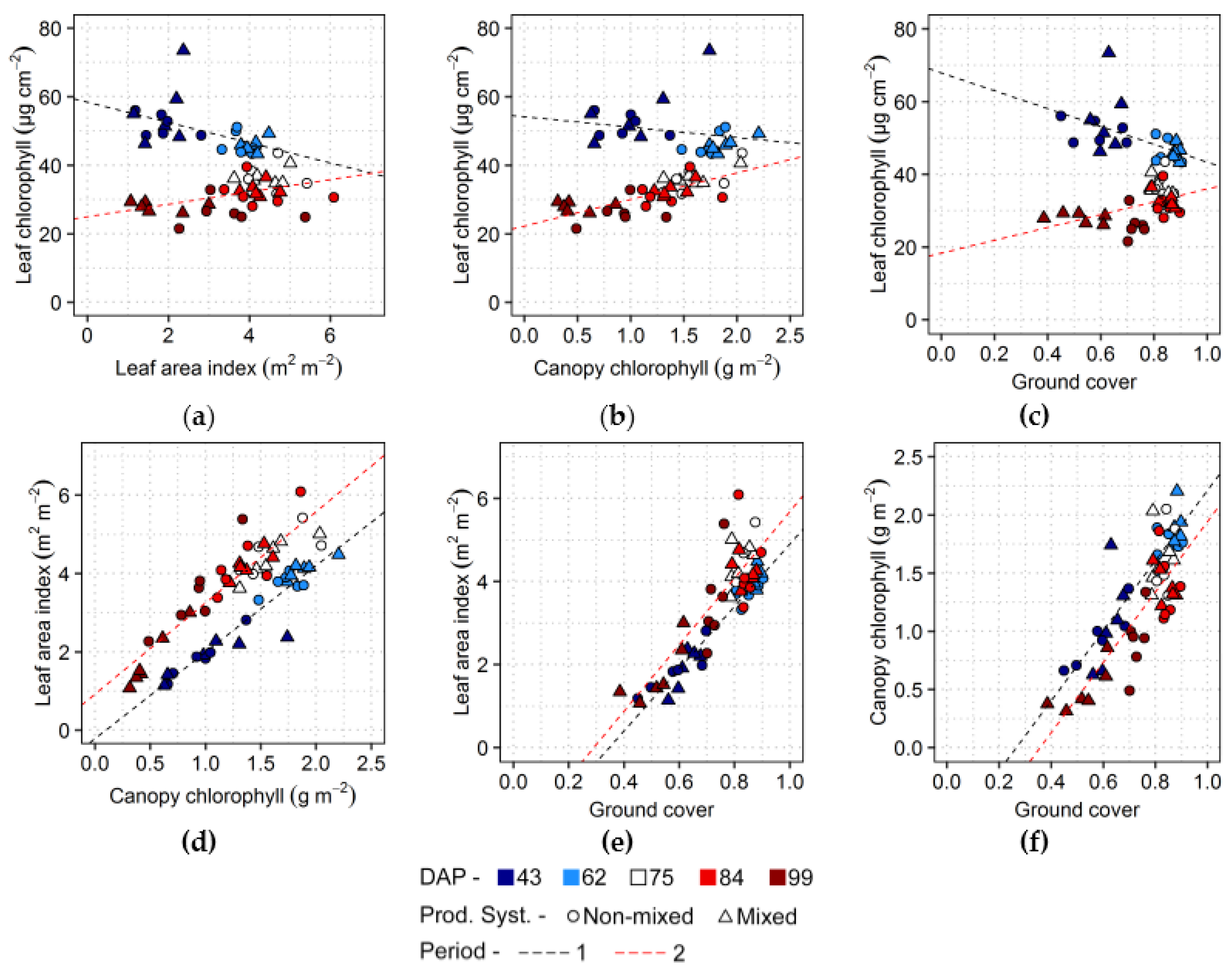
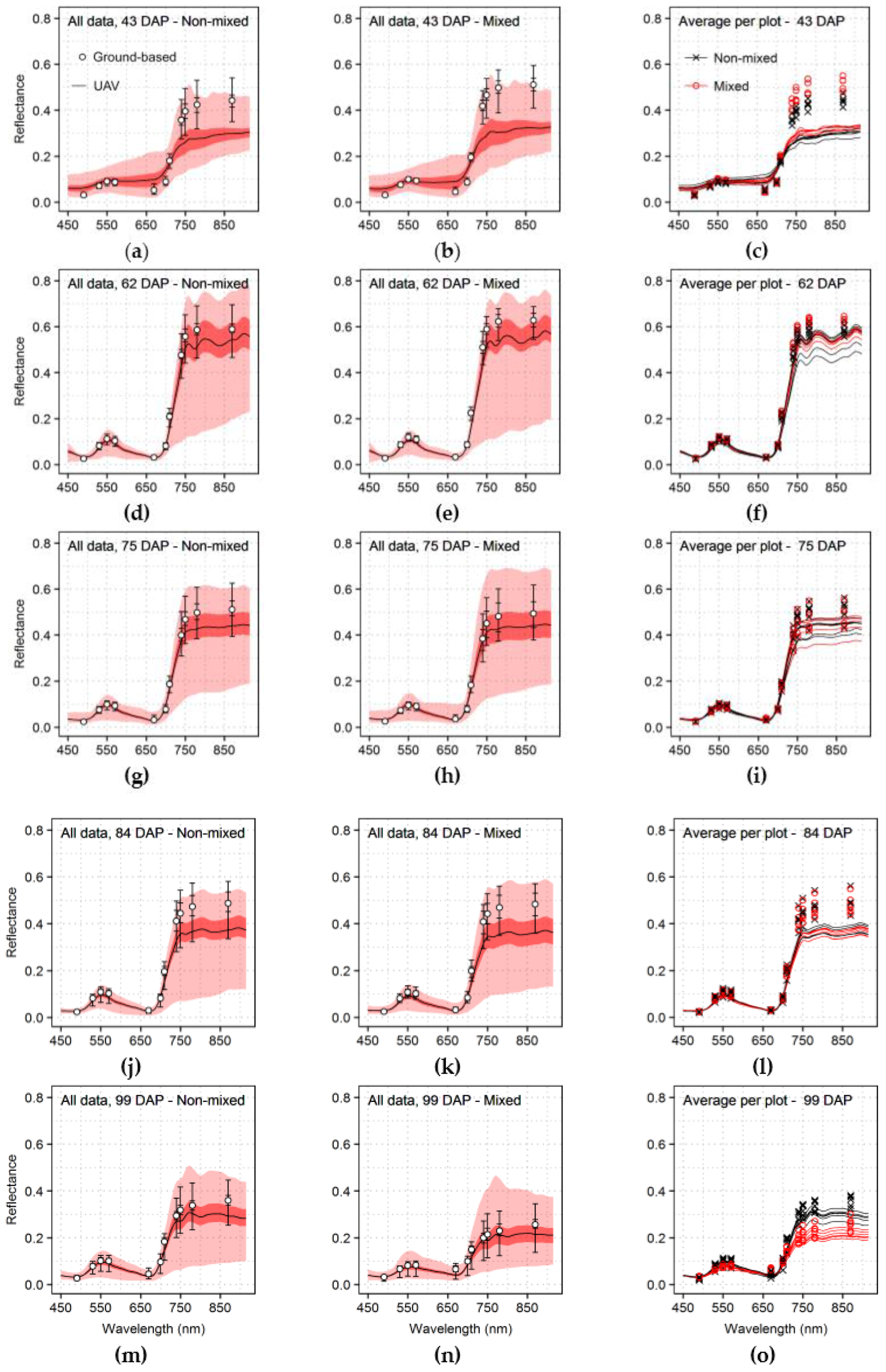
3.1. Description of Crop Development and Canopy Reflectance over Time
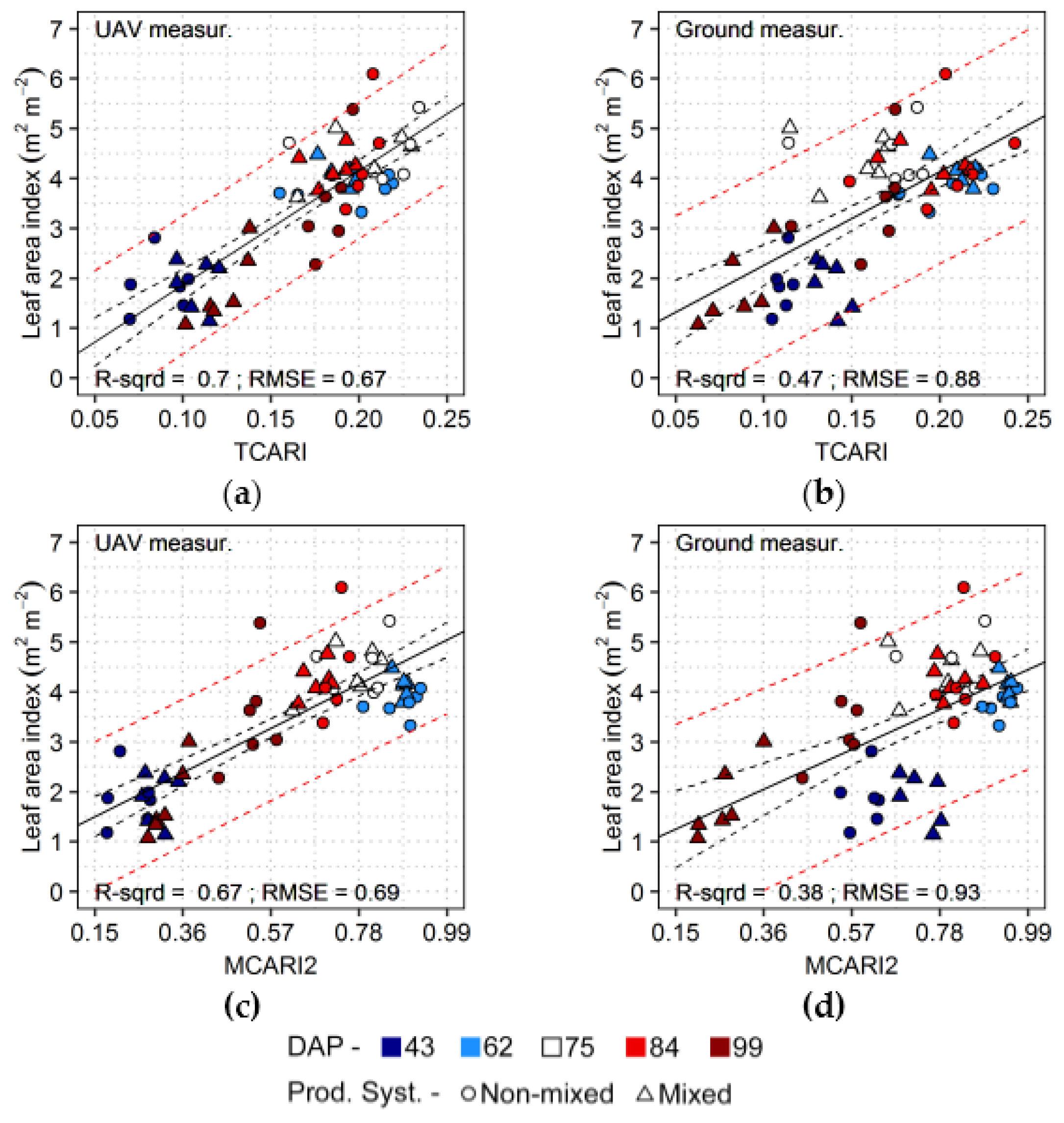
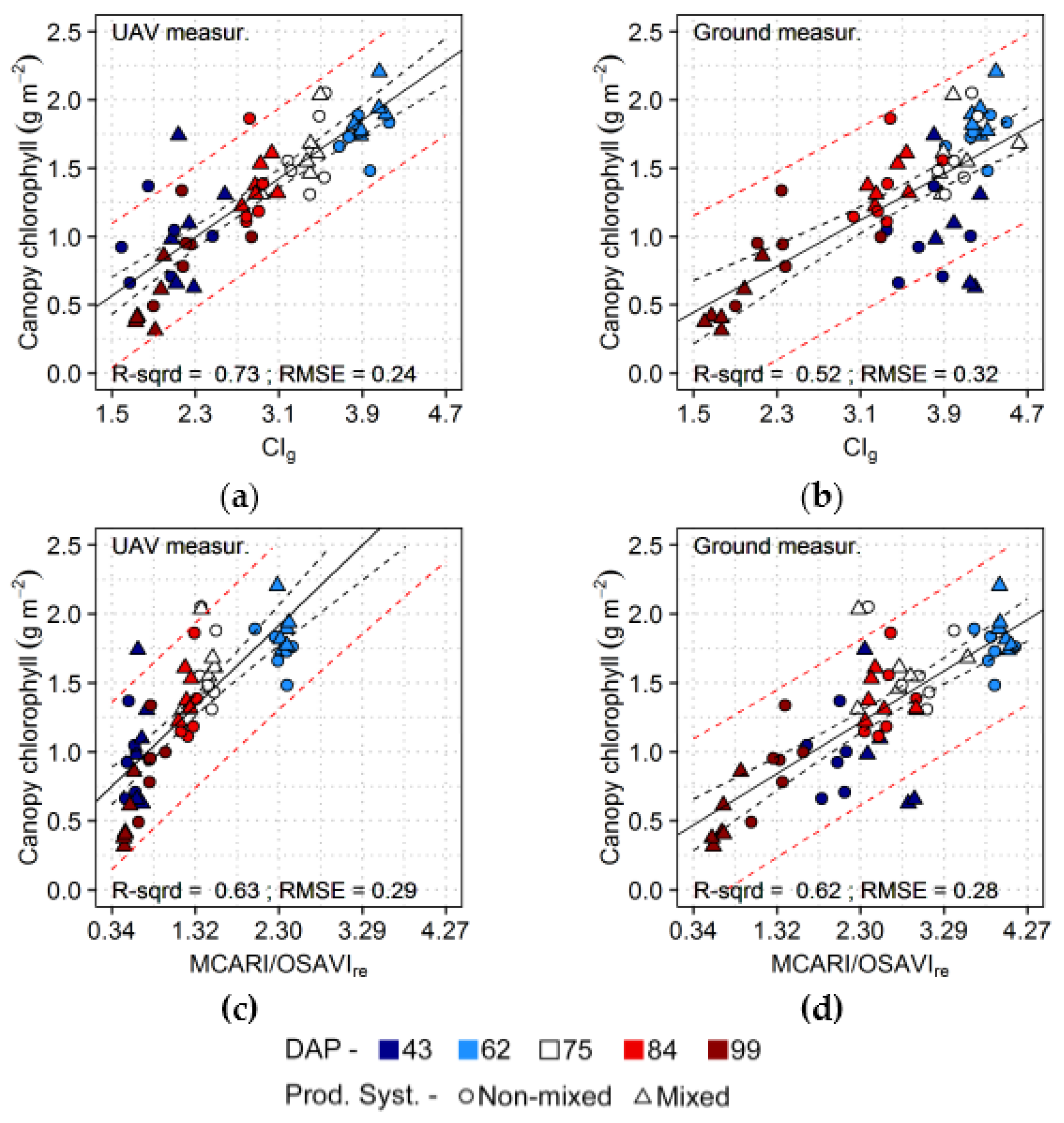
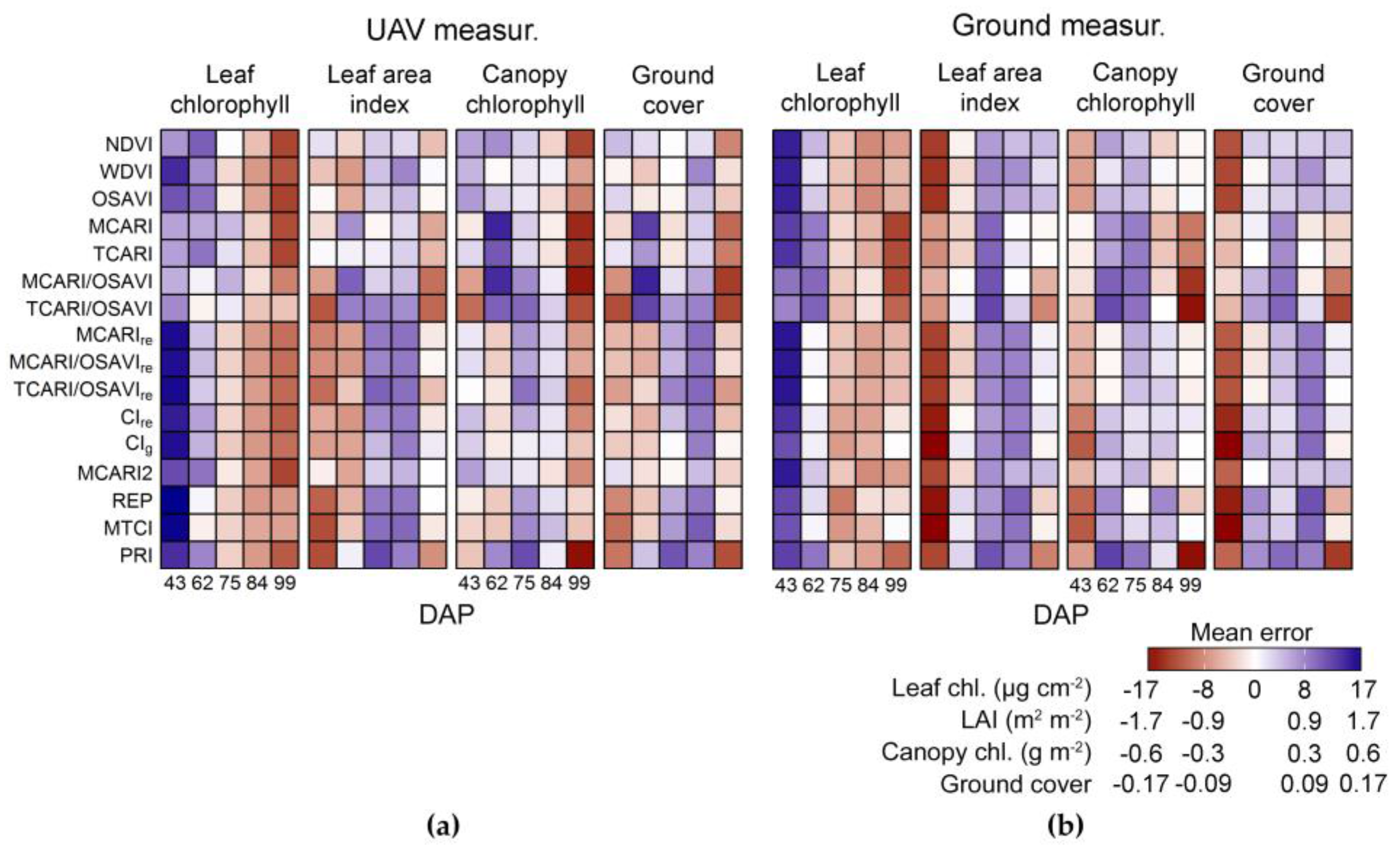
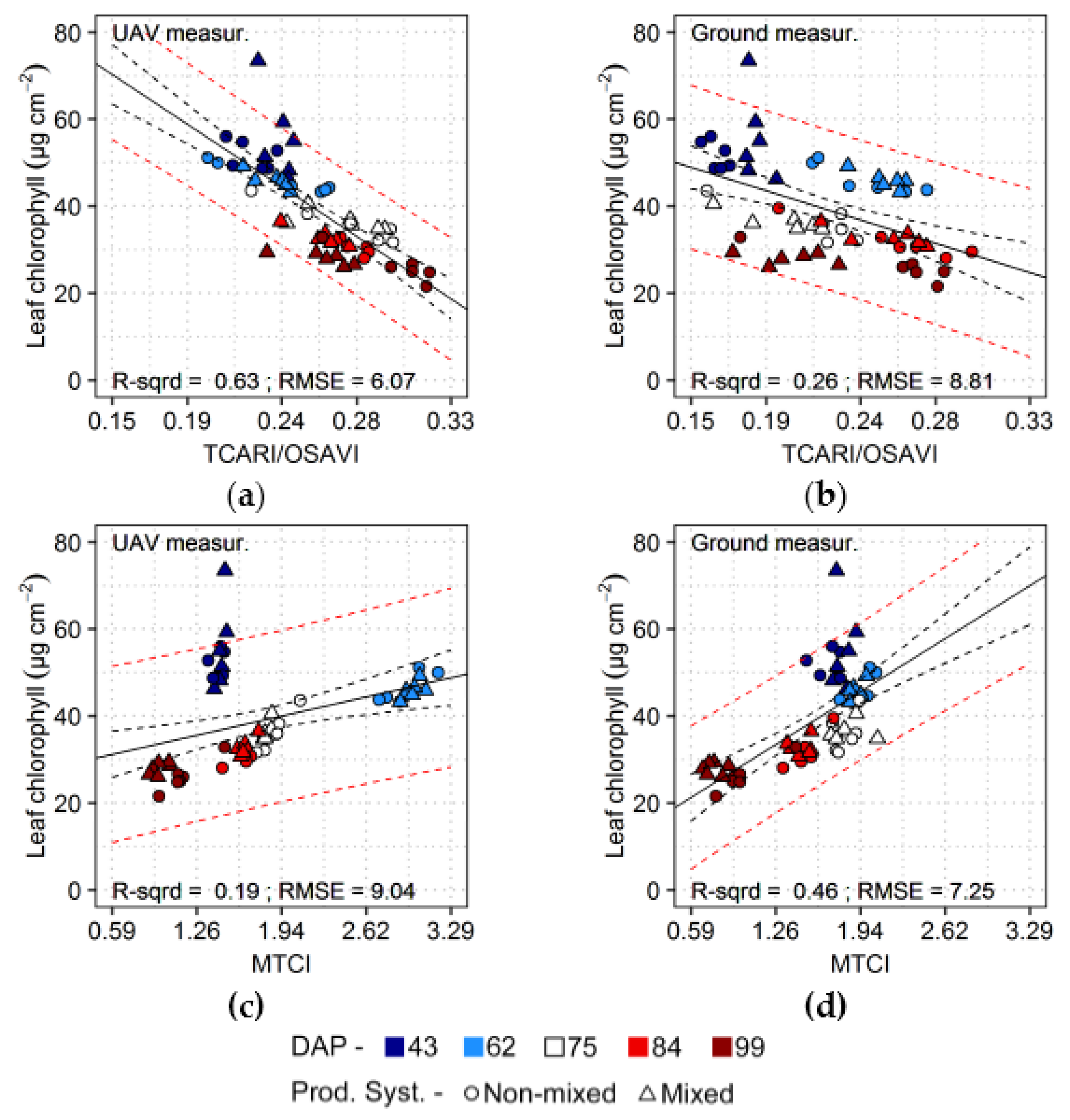
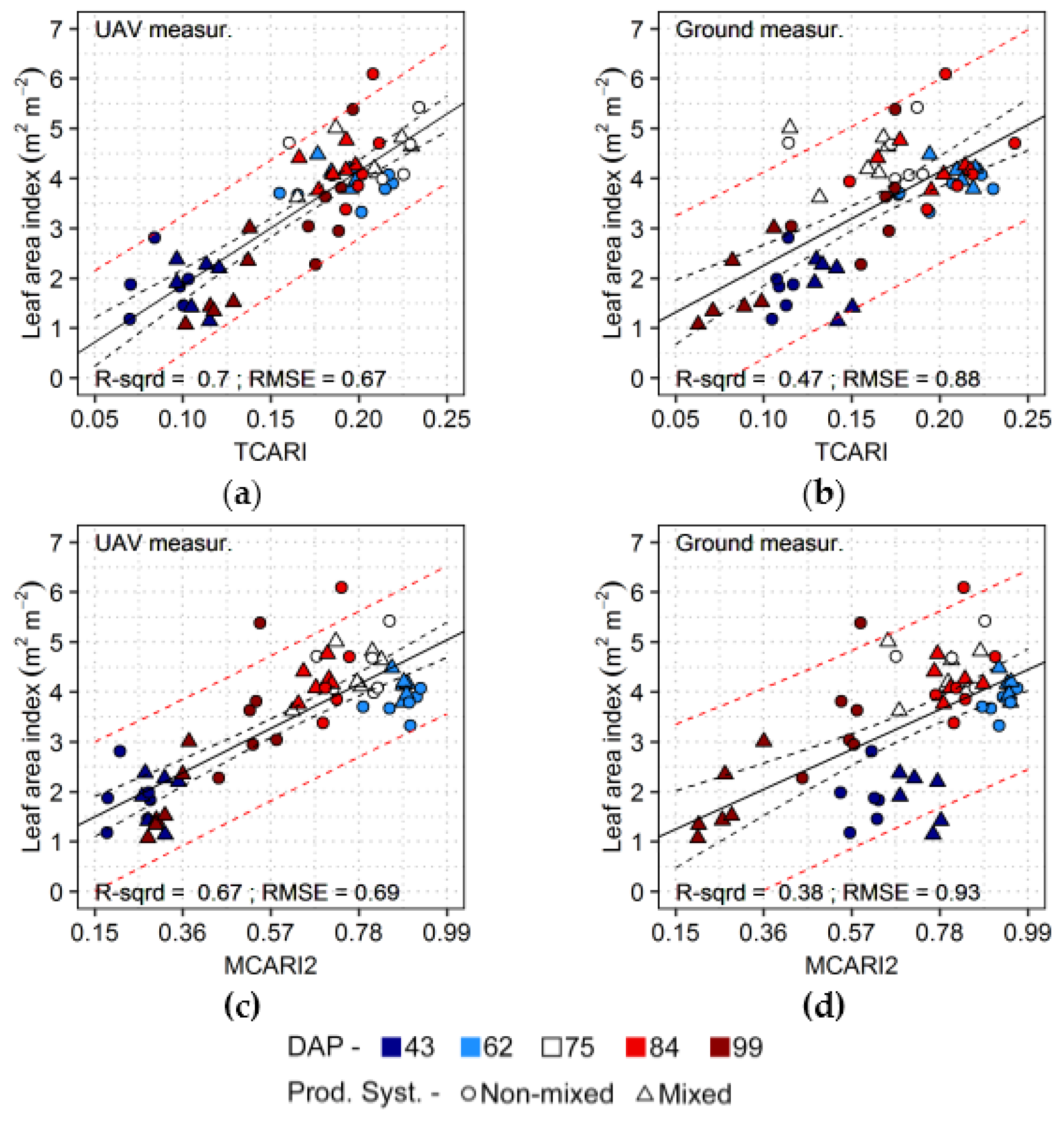
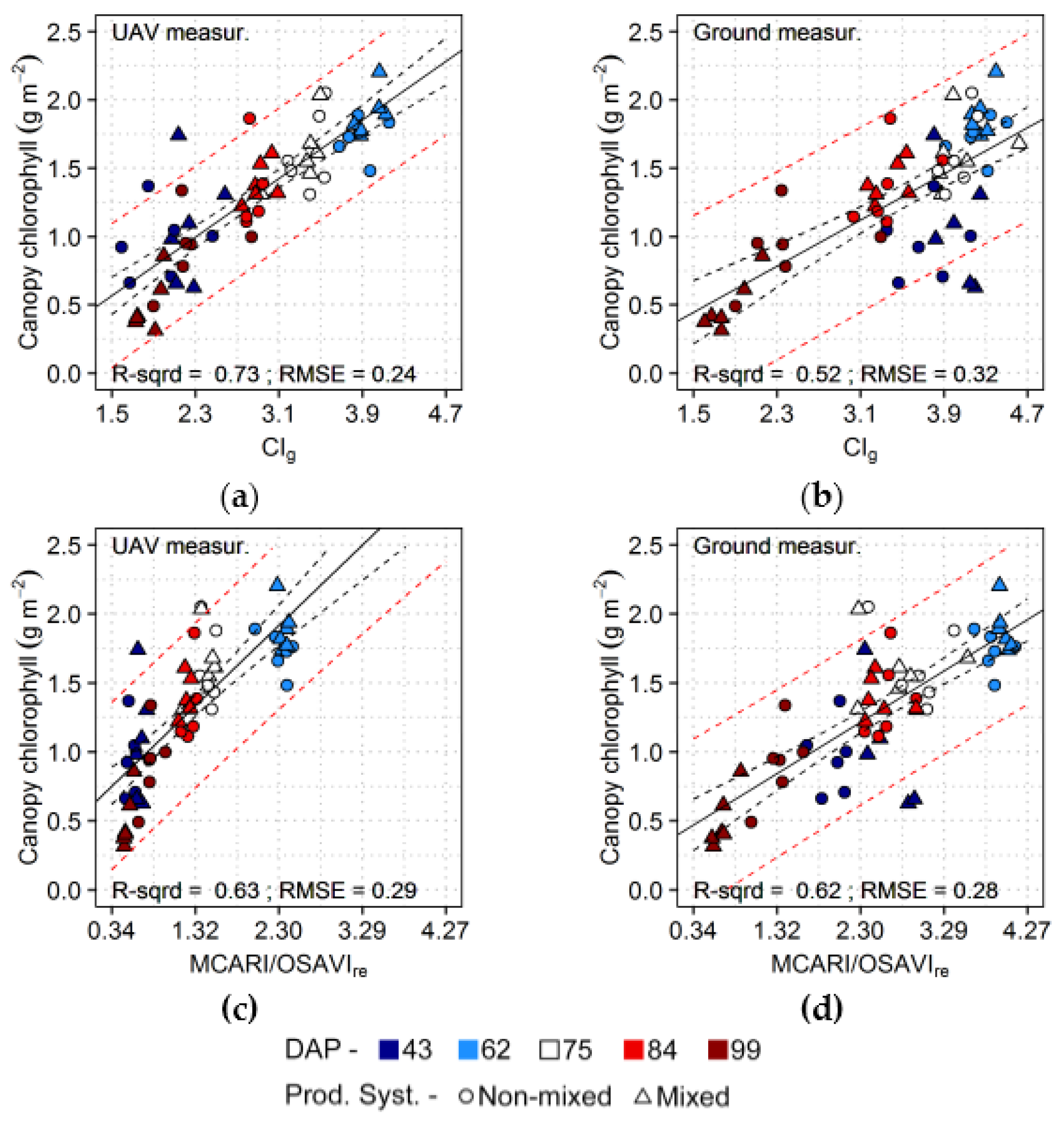
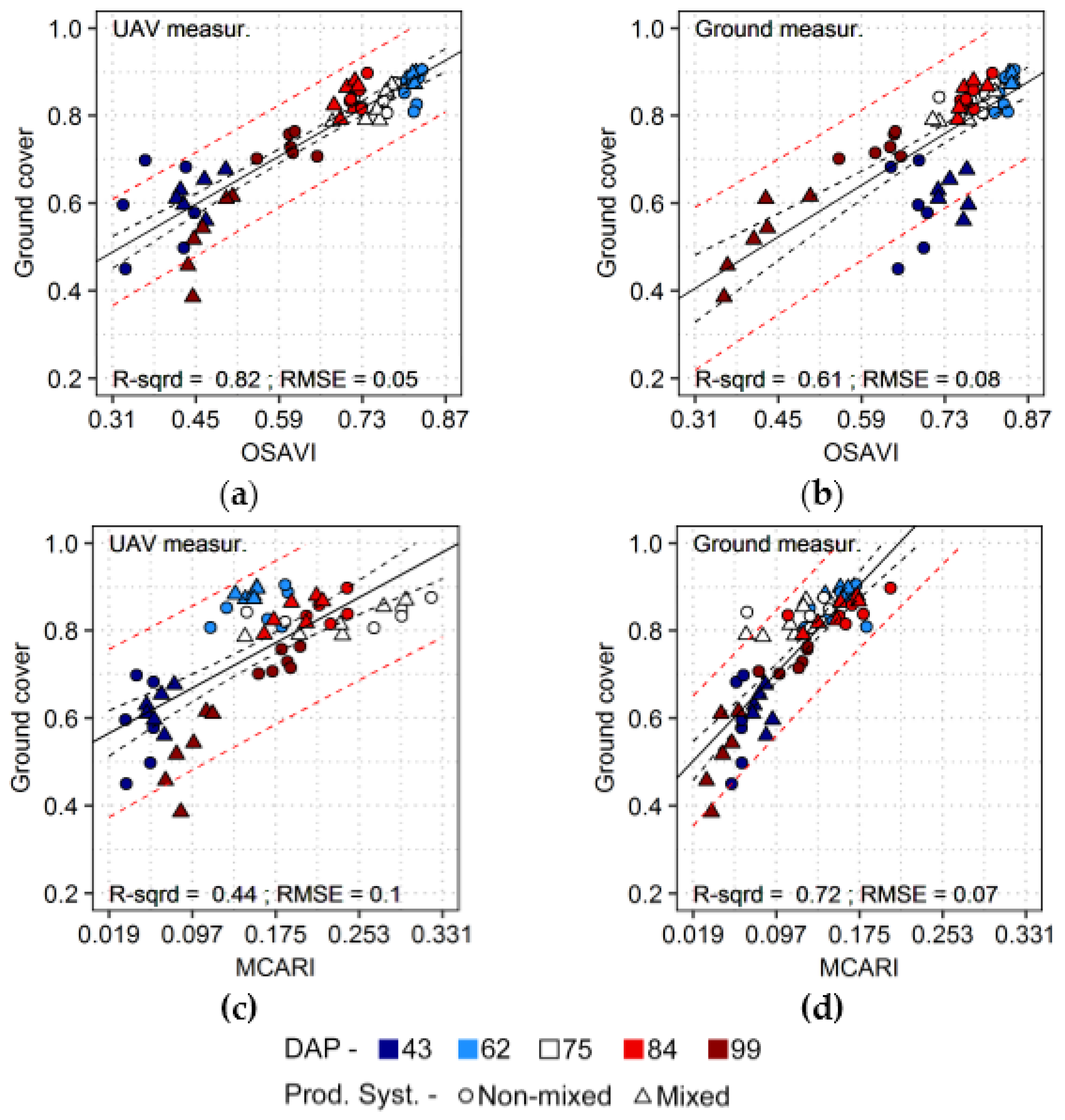
3.2. Performance of Crop Traits Retrieval Using UAV and Ground-Based Spectral Measurements
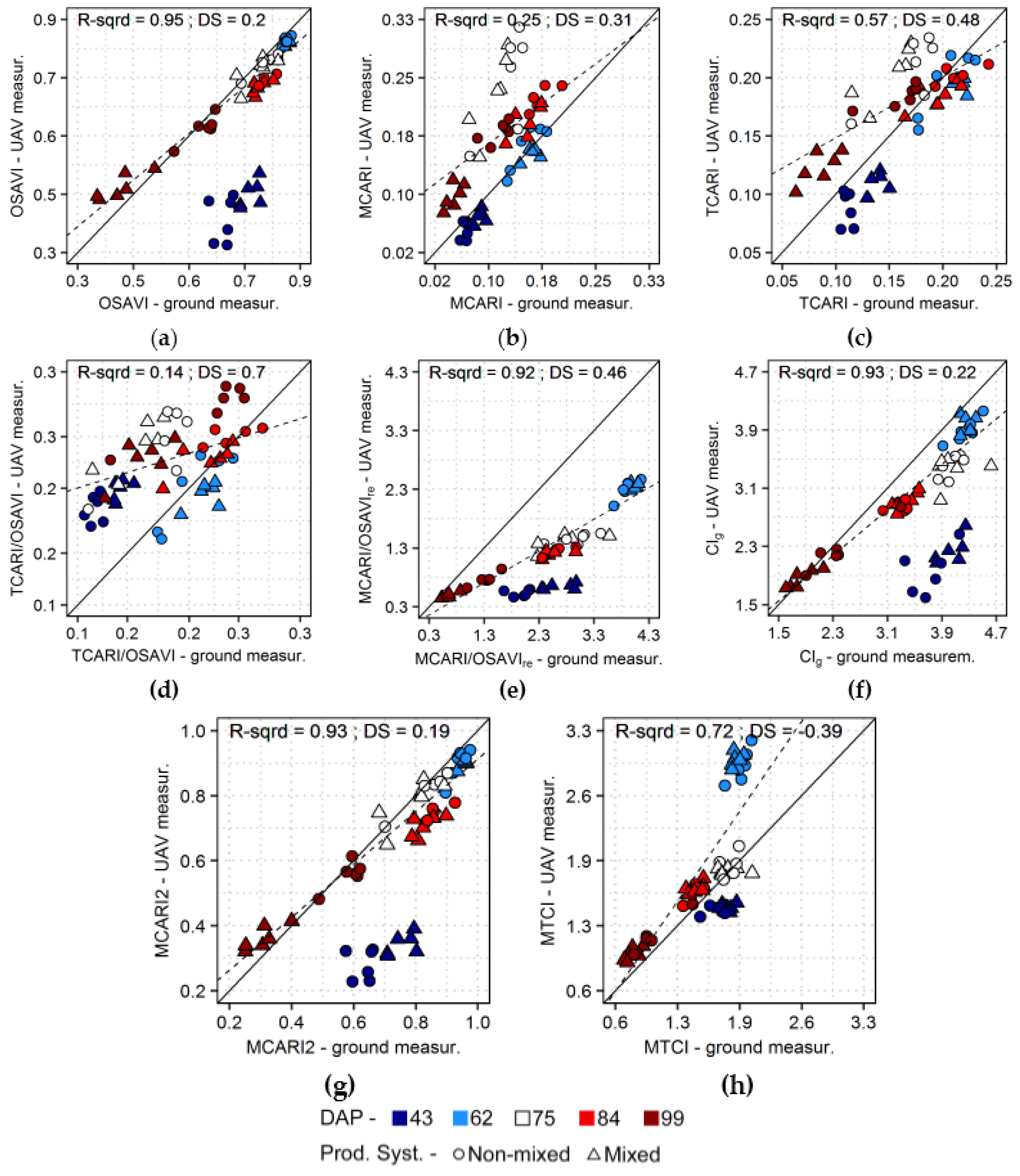
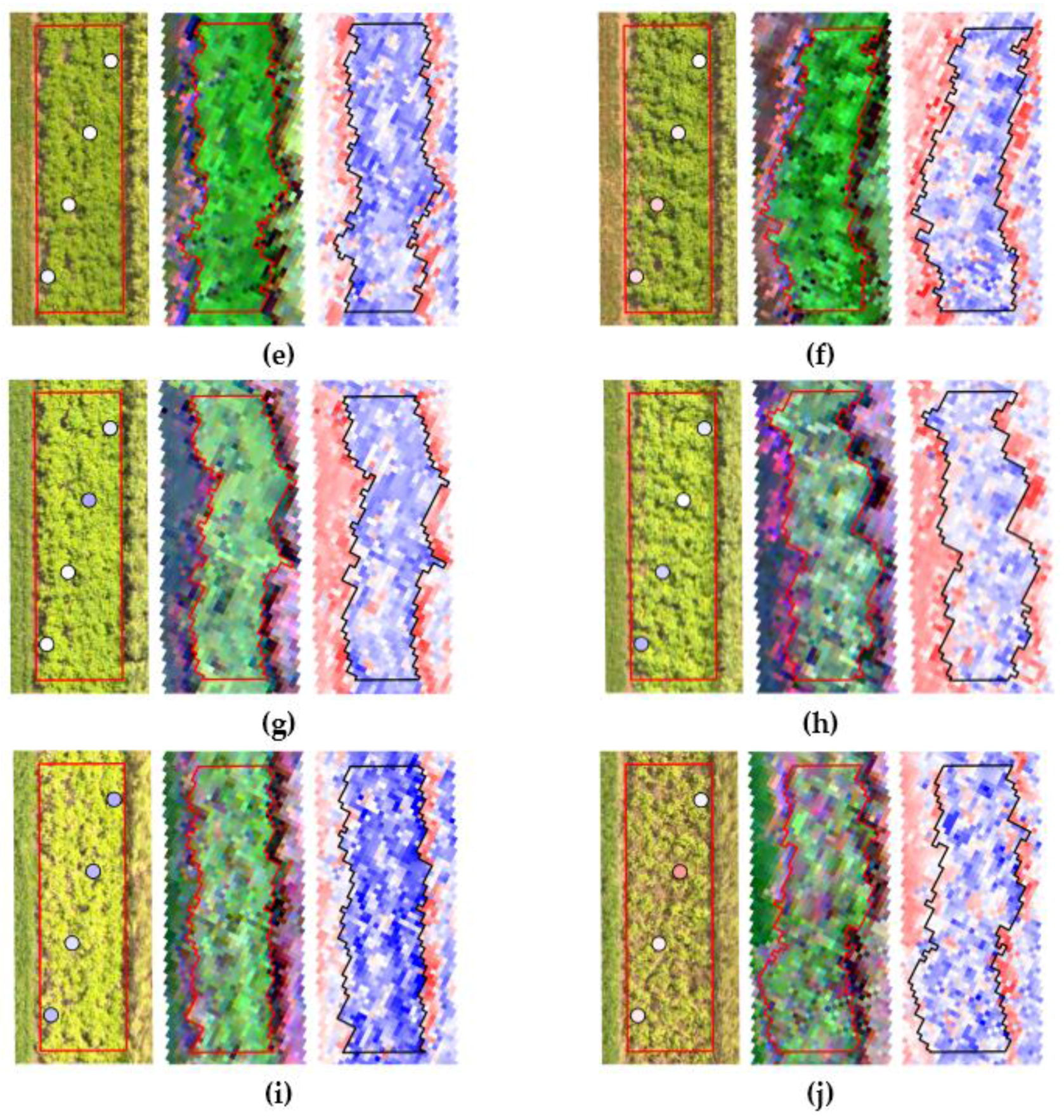
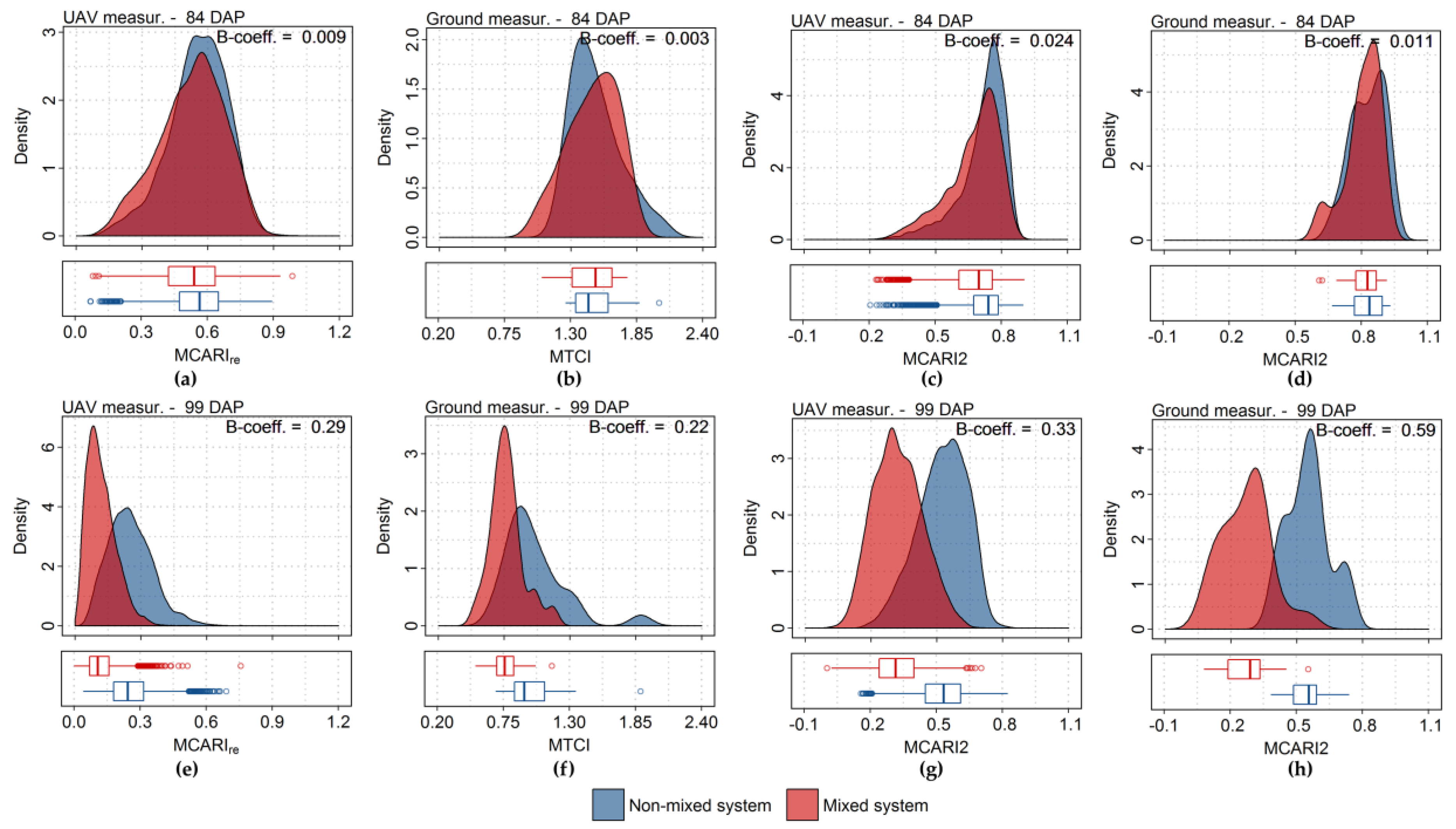
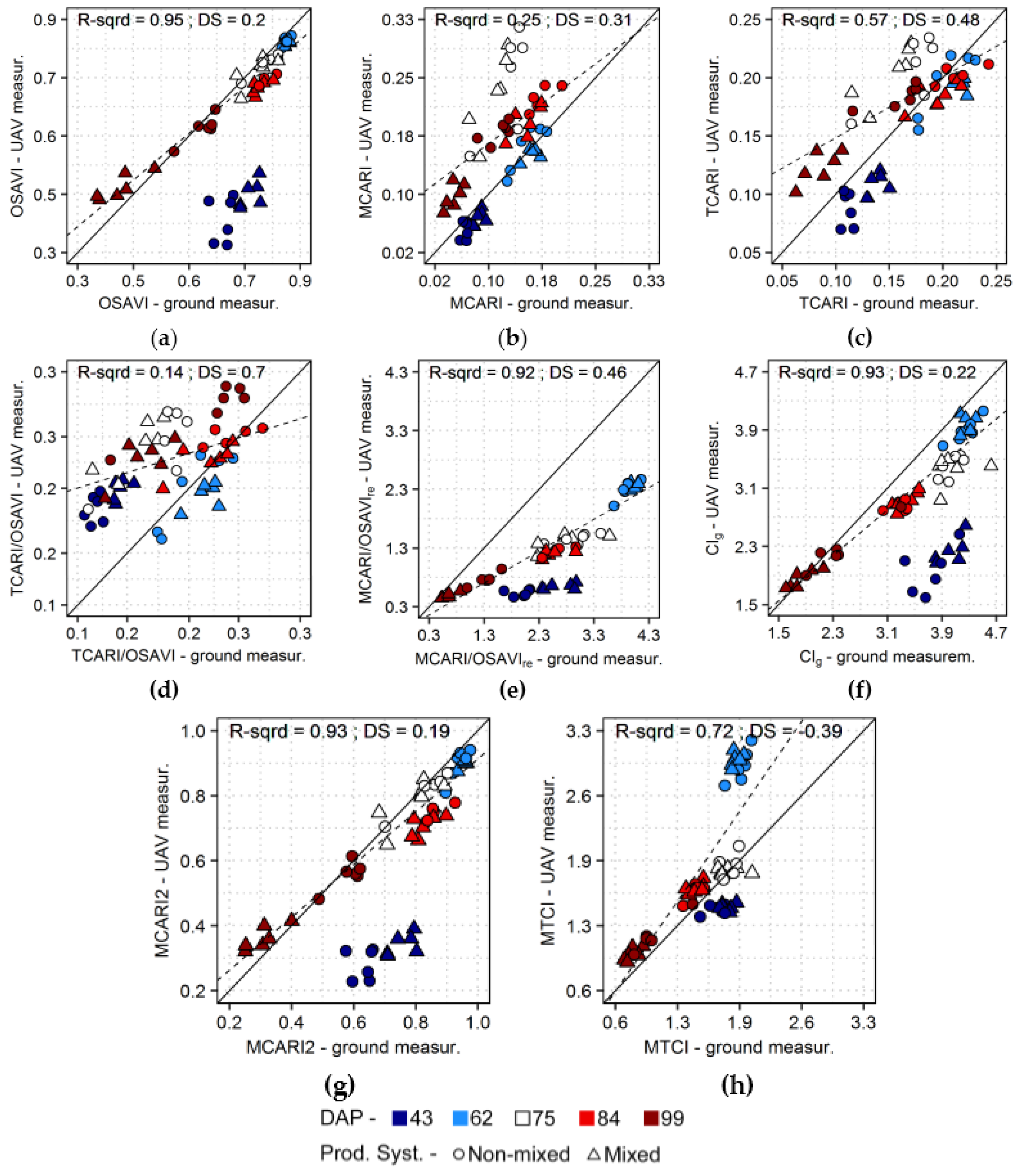
3.3. Intercomparison of UAV and Ground-Based Spectra
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vegetation Indices | UAV Measurements | |||||||
|---|---|---|---|---|---|---|---|---|
| Leaf Chlorophyll | Leaf Area Index | Canopy Chlorophyll | Ground Cover | |||||
| R2 | RMSE 1 | R2 | RMSE 1 | R2 | RMSE 1 | R2 | RMSE 1 | |
| NDVI | 0.38 | 6.03 | 0.62 | 0.60 | 0.74 | 0.239 | 0.90 | 0.037 |
| WDVI | 0.66 | 4.36 | 0.36 | 0.82 | 0.75 | 0.237 | 0.67 | 0.066 |
| OSAVI | 0.53 | 5.24 | 0.53 | 0.69 | 0.80 | 0.208 | 0.85 | 0.046 |
| MCARI | 0.08 | 7.33 | 0.38 | 0.81 | 0.05 | 0.471 | 0.22 | 0.102 |
| TCARI | 0.00 | 7.56 | 0.56 | 0.68 | 0.26 | 0.414 | 0.56 | 0.079 |
| MCARI/OSAVI | 0.42 | 5.77 | 0.12 | 0.94 | 0.03 | 0.471 | 0.01 | 0.111 |
| TCARI/OSAVI | 0.71 | 4.01 | 0.00 | 0.99 | 0.23 | 0.406 | 0.04 | 0.106 |
| MCARIre | 0.82 | 3.22 | 0.14 | 0.94 | 0.61 | 0.298 | 0.46 | 0.084 |
| MCARI/OSAVIre | 0.80 | 3.35 | 0.19 | 0.91 | 0.66 | 0.275 | 0.53 | 0.079 |
| TCARI/OSAVIre | 0.86 | 2.82 | 0.02 | 0.98 | 0.42 | 0.354 | 0.21 | 0.096 |
| CIre | 0.87 | 2.80 | 0.18 | 0.93 | 0.68 | 0.270 | 0.50 | 0.081 |
| CIg | 0.80 | 3.42 | 0.33 | 0.83 | 0.81 | 0.201 | 0.63 | 0.071 |
| MCARI2 | 0.53 | 5.21 | 0.49 | 0.72 | 0.77 | 0.223 | 0.81 | 0.051 |
| REP | 0.88 | 2.66 | 0.21 | 0.90 | 0.72 | 0.249 | 0.54 | 0.078 |
| MTCI | 0.91 | 2.31 | 0.14 | 0.94 | 0.65 | 0.281 | 0.44 | 0.085 |
| PRI | 0.28 | 6.49 | 0.03 | 0.96 | 0.04 | 0.469 | 0.02 | 0.109 |
| Ground-Based Measurements | ||||||||
| NDVI | 0.33 | 6.18 | 0.63 | 0.59 | 0.70 | 0.255 | 0.92 | 0.032 |
| WDVI | 0.52 | 5.20 | 0.44 | 0.75 | 0.72 | 0.240 | 0.82 | 0.050 |
| OSAVI | 0.41 | 5.83 | 0.58 | 0.63 | 0.74 | 0.233 | 0.92 | 0.033 |
| MCARI | 0.10 | 7.16 | 0.37 | 0.81 | 0.30 | 0.400 | 0.69 | 0.064 |
| TCARI | 0.13 | 7.00 | 0.37 | 0.80 | 0.34 | 0.386 | 0.71 | 0.062 |
| MCARI/OSAVI | 0.00 | 7.56 | 0.20 | 0.90 | 0.07 | 0.467 | 0.40 | 0.090 |
| TCARI/OSAVI | 0.03 | 7.46 | 0.04 | 0.98 | 0.00 | 0.481 | 0.15 | 0.105 |
| MCARIre | 0.70 | 4.11 | 0.31 | 0.84 | 0.72 | 0.243 | 0.66 | 0.067 |
| MCARI/OSAVIre | 0.67 | 4.28 | 0.34 | 0.82 | 0.74 | 0.232 | 0.70 | 0.063 |
| TCARI/OSAVIre | 0.78 | 3.52 | 0.27 | 0.85 | 0.74 | 0.237 | 0.57 | 0.074 |
| CIre | 0.65 | 4.53 | 0.45 | 0.74 | 0.83 | 0.194 | 0.72 | 0.061 |
| CIg | 0.67 | 4.33 | 0.43 | 0.75 | 0.83 | 0.194 | 0.67 | 0.067 |
| MCARI2 | 0.42 | 5.75 | 0.53 | 0.68 | 0.71 | 0.244 | 0.89 | 0.038 |
| REP | 0.60 | 4.76 | 0.27 | 0.85 | 0.65 | 0.282 | 0.35 | 0.092 |
| MTCI | 0.69 | 4.18 | 0.41 | 0.76 | 0.83 | 0.196 | 0.64 | 0.070 |
| PRI | 0.00 | 7.64 | 0.00 | 0.99 | 0.00 | 0.482 | 0.05 | 0.110 |
| Vegetation Indices | B-Coefficient | Difference between B-Coefficients (99 DAP–84 DAP) | ||||
|---|---|---|---|---|---|---|
| 84 DAP | 99 DAP | |||||
| UAV | Ground | UAV | Ground | UAV (Order) | Ground (Order) | |
| NDVI | 0.052 | 0.049 | 0.289 | 0.459 | 0.237 (6) | 0.410 (7) |
| WDVI | 0.008 | 0.003 | 0.258 | 0.564 | 0.250 (4) | 0.561 (2) |
| OSAVI | 0.014 | 0.011 | 0.262 | 0.558 | 0.248 (5) | 0.547 (4) |
| MCARI | 0.041 | 0.011 | 0.264 | 0.419 | 0.223 (8) | 0.408 (8) |
| TCARI | 0.037 | 0.007 | 0.268 | 0.444 | 0.231 (7) | 0.437 (6) |
| MCARI/OSAVI | 0.048 | 0.007 | 0.189 | 0.297 | 0.141 (9) | 0.290 (10) |
| TCARI/OSAVI | 0.029 | 0.004 | 0.053 | 0.184 | 0.024 (14) | 0.180 (15) |
| MCARIre | 0.009 | 0.007 | 0.285 | 0.535 | 0.276 (3) | 0.528 (5) |
| MCARI/OSAVIre | 0.010 | 0.007 | 0.302 | 0.559 | 0.292 (2) | 0.552 (3) |
| TCARI/OSAVIre | 0.018 | 0.004 | 0.089 | 0.189 | 0.071 (11) | 0.185 (14) |
| CIre | 0.006 | 0.008 | 0.127 | 0.319 | 0.121 (10) | 0.311 (9) |
| CIg | 0.009 | 0.000 | 0.023 | 0.228 | 0.014 (15) | 0.228 (11) |
| MCARI2 | 0.024 | 0.011 | 0.333 | 0.594 | 0.309 (1) | 0.583 (1) |
| REP | 0.007 | 0.010 | 0.042 | 0.004 | 0.035 (13) | −0.006 (16) |
| MTCI | 0.010 | 0.003 | 0.067 | 0.217 | 0.057 (12) | 0.214 (12) |
| PRI | 0.003 | 0.033 | 0.003 | 0.226 | 0.000 (16) | 0.193 (13) |
References
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Yost, M.A.; Kitchen, N.R.; Sudduth, K.A.; Sadler, E.J.; Drummond, S.T.; Volkmann, M.R. Long-term impact of a precision agriculture system on grain crop production. Precis. Agric. 2016. [Google Scholar] [CrossRef]
- Sankaran, S.; Khot, L.R.; Espinoza, C.Z.; Jarolmasjed, S.; Sathuvalli, V.R.; Vandemark, G.J.; Miklas, P.N.; Carter, A.H.; Pumphrey, M.O.; Knowles, N.R.; et al. Low-altitude, high-resolution aerial imaging systems for row and field crop phenotyping: A review. Eur. J. Agron. 2015, 70, 112–123. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W.; Kooistra, L. Using Hyperspectral Remote Sensing Data for Retrieving Canopy Chlorophyll and Nitrogen Content. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 574–583. [Google Scholar] [CrossRef]
- Li, L.; Zhang, Q.; Huang, D. A Review of Imaging Techniques for Plant Phenotyping. Sensors 2014, 14, 20078–20111. [Google Scholar] [CrossRef] [PubMed]
- Verrelst, J.; Camps-Valls, G.; Muñoz-Marí, J.; Rivera, J.P.; Veroustraete, F.; Clevers, J.G.P.W.; Moreno, J. Optical remote sensing and the retrieval of terrestrial vegetation bio-geophysical properties—A review. ISPRS J. Photogramm. Remote Sens. 2015, 108, 273–290. [Google Scholar] [CrossRef]
- Atzberger, C.; Darvishzadeh, R.; Immitzer, M.; Schlerf, M.; Skidmore, A.; le Maire, G. Comparative analysis of different retrieval methods for mapping grassland leaf area index using airborne imaging spectroscopy. Int. J. Appl. Earth Obs. Geoinf. 2015, 43, 19–31. [Google Scholar] [CrossRef]
- Kooistra, L.; Clevers, J.G.P.W. Estimating potato leaf chlorophyll content using ratio vegetation indices. Remote Sens. Lett. 2016, 7, 611–620. [Google Scholar] [CrossRef]
- Mahlein, A.-K.; Rumpf, T.; Welke, P.; Dehne, H.-W.; Plümer, L.; Steiner, U.; Oerke, E.-C. Development of spectral indices for detecting and identifying plant diseases. Remote Sens. Environ. 2013, 128, 21–30. [Google Scholar] [CrossRef]
- Tanger, P.; Klassen, S.; Mojica, J.P.; Lovell, J.T.; Moyers, B.T.; Baraoidan, M.; Naredo, M.E.B.; McNally, K.L.; Poland, J.; Bush, D.R.; et al. Field-based high throughput phenotyping rapidly identifies genomic regions controlling yield components in rice. Sci. Rep. 2017, 7, 42839. [Google Scholar] [CrossRef] [PubMed]
- Zaman-Allah, M.; Vergara, O.; Araus, J.L.; Tarekegne, A.; Magorokosho, C.; Zarco-Tejada, P.J.; Hornero, A.; Albà, A.H.; Das, B.; Craufurd, P.; et al. Unmanned aerial platform-based multi-spectral imaging for field phenotyping of maize. Plant Methods 2015, 11, 35. [Google Scholar] [CrossRef] [PubMed]
- Clevers, J.G.P.W.; Kooistra, L.; van den Brande, M.M.M. Using Sentinel-2 Data for Retrieving LAI and Leaf and Canopy Chlorophyll Content of a Potato Crop. Remote Sens. 2017, 9, 405. [Google Scholar] [CrossRef]
- Steven, M.D.; Malthus, T.J.; Baret, F.; Xu, H.; Chopping, M.J. Intercalibration of vegetation indices from different sensor systems. Remote Sens. Environ. 2003, 88, 412–422. [Google Scholar] [CrossRef]
- Kim, Y.; Huete, A.R.; Miura, T.; Jiang, Z. Spectral compatibility of vegetation indices across sensors: Band decomposition analysis with Hyperion data. J. Appl. Remote Sens. 2010, 4, 043520. [Google Scholar] [CrossRef]
- Chander, G.; Hewison, T.J.; Fox, N.; Wu, X.; Xiong, X.; Blackwell, W.J. Overview of intercalibration of satellite instruments. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1056–1080. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, B. Support Vector Regression-Based Downscaling for Intercalibration of Multiresolution Satellite Images. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1114–1123. [Google Scholar] [CrossRef]
- Fitzgerald, G.J. Characterizing vegetation indices derived from active and passive sensors. Int. J. Remote Sens. 2010, 31, 4335–4348. [Google Scholar] [CrossRef]
- Yao, X.; Yao, X.; Jia, W.; Tian, Y.; Ni, J.; Cao, W.; Zhu, Y. Comparison and Intercalibration of Vegetation Indices from Different Sensors for Monitoring Above-Ground Plant Nitrogen Uptake in Winter Wheat. Sensors 2013, 13, 3109–3130. [Google Scholar] [CrossRef] [PubMed]
- Finckh, M.R.; Schulte-Geldermann, E.; Bruns, C. Challenges to Organic Potato Farming: Disease and Nutrient Management. Potato Res. 2006, 49, 27–42. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; De Colstoun, E.B.; McMurtrey, J.E. Estimating corn leaf chlorophyll concentration from leaf and canopy reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Suárez, L.; Zarco-Tejada, P.J.; Sepulcre-Cantó, G.; Pérez-Priego, O.; Miller, J.R.; Jiménez-Muñoz, J.C.; Sobrino, J. Assessing canopy PRI for water stress detection with diurnal airborne imagery. Remote Sens. Environ. 2008, 112, 560–575. [Google Scholar] [CrossRef]
- Ammann, K. Why farming with high tech methods should integrate elements of organic agriculture. New Biotechnol. 2009, 25, 378–388. [Google Scholar] [CrossRef] [PubMed]
- European and Mediterranean Plant Protection Organization. Phytophthora infestans on potato. EPPO Bull. 2008, 38, 268–271. [Google Scholar] [CrossRef]
- Suomalainen, J.; Anders, N.; Iqbal, S.; Roerink, G.; Franke, J.; Wenting, P.; Hünniger, D.; Bartholomeus, H.; Becker, R.; Kooistra, L. A Lightweight Hyperspectral Mapping System and Photogrammetric Processing Chain for Unmanned Aerial Vehicles. Remote Sens. 2014, 6, 11013–11030. [Google Scholar] [CrossRef]
- Schläpfer, D.; Richter, R. Geo-atmospheric processing of airborne imaging spectrometry data. Part 1: Parametric orthorectification. Int. J. Remote Sens. 2002, 23, 2609–2630. [Google Scholar] [CrossRef]
- Ullman, S. The Interpretation of Structure from Motion. Proc. R. Soc. Lond. B Biol. Sci. 1979, 203, 405–426. [Google Scholar] [CrossRef] [PubMed]
- Lancashire, P.D.; Bleiholder, H.; Boom, T.V.D.; Langelüddeke, P.; Stauss, R.; Weber, E.; Witzenberger, A. A uniform decimal code for growth stages of crops and weeds. Ann. Appl. Biol. 1991, 119, 561–601. [Google Scholar] [CrossRef]
- Jki, O. Growth stages of mono-and dicotyledonous plants. BBCH Scale 2010. [Google Scholar] [CrossRef]
- Habib, A.; Xiong, W.; He, F.; Yang, H.L.; Crawford, M. Improving Orthorectification of UAV-Based Push-Broom Scanner Imagery Using Derived Orthophotos From Frame Cameras. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 262–276. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 679–698. [Google Scholar] [CrossRef]
- Uddling, J.; Gelang-Alfredsson, J.; Piikki, K.; Pleijel, H. Evaluating the relationship between leaf chlorophyll concentration and SPAD-502 chlorophyll meter readings. Photosynth. Res. 2007, 91, 37–46. [Google Scholar] [CrossRef] [PubMed]
- Parry, C.; Blonquist, J.M.; Bugbee, B. In situ measurement of leaf chlorophyll concentration: Analysis of the optical/absolute relationship: The optical/absolute chlorophyll relationship. Plant Cell Environ. 2014, 37, 2508–2520. [Google Scholar] [CrossRef] [PubMed]
- Darvishzadeh, R.; Skidmore, A.; Schlerf, M.; Atzberger, C. Inversion of a radiative transfer model for estimating vegetation LAI and chlorophyll in a heterogeneous grassland. Remote Sens. Environ. 2008, 112, 2592–2604. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F.; Smith, G.J.; Jonckheere, I.; Coppin, P. Review of methods for in situ leaf area index (LAI) determination. Agric. For. Meteorol. 2004, 121, 37–53. [Google Scholar] [CrossRef]
- Demarez, V.; Duthoit, S.; Baret, F.; Weiss, M.; Dedieu, G. Estimation of leaf area and clumping indexes of crops with hemispherical photographs. Agric. For. Meteorol. 2008, 148, 644–655. [Google Scholar] [CrossRef]
- Baret, F. A Simple Method to Calibrate Hemispherical Photographs. Available online: http://w3.avignon.inra.fr/valeri/methodology/hemis_calib1.pdf (accessed on 16 June 2017).
- Liu, Y.; Mu, X.; Wang, H.; Yan, G. A novel method for extracting green fractional vegetation cover from digital images. J. Veg. Sci. 2012, 23, 406–418. [Google Scholar] [CrossRef]
- Song, W.; Mu, X.; Yan, G.; Huang, S. Extracting the Green Fractional Vegetation Cover from Digital Images Using a Shadow-Resistant Algorithm (SHAR-LABFVC). Remote Sens. 2015, 7, 10425–10443. [Google Scholar] [CrossRef]
- Nilson, T. A theoretical analysis of the frequency of gaps in plant stands. Agric. Meteorol. 1971, 8, 25–38. [Google Scholar] [CrossRef]
- Garrigues, S.; Shabanov, N.V.; Swanson, K.; Morisette, J.T.; Baret, F.; Myneni, R.B. Intercomparison and sensitivity analysis of Leaf Area Index retrievals from LAI-2000, AccuPAR, and digital hemispherical photography over croplands. Agric. For. Meteorol. 2008, 148, 1193–1209. [Google Scholar] [CrossRef]
- Campbell, G.S. Derivation of an angle density function for canopies with ellipsoidal leaf angle distributions. Agric. For. Meteorol. 1990, 49, 173–176. [Google Scholar] [CrossRef]
- Bréda, N.J.J. Ground-based measurements of leaf area index: A review of methods, instruments and current controversies. J. Exp. Bot. 2003, 54, 2403–2417. [Google Scholar] [CrossRef] [PubMed]
- Lang, A.R.G.; Xiang, Y. Estimation of leaf area index from transmission of direct sunlight in discontinuous canopies. Agric. For. Meteorol. 1986, 37, 229–243. [Google Scholar] [CrossRef]
- Van Gardingen, P.R.; Jackson, G.E.; Hernandez-Daumas, S.; Russell, G.; Sharp, L. Leaf area index estimates obtained for clumped canopies using hemispherical photography. Agric. For. Meteorol. 1999, 94, 243–257. [Google Scholar] [CrossRef]
- Jonckheere, I.; Fleck, S.; Nackaerts, K.; Muys, B.; Coppin, P.; Weiss, M.; Baret, F. Review of methods for in situ leaf area index determination: Part I. Theories, sensors and hemispherical photography. Agric. For. Meteorol. 2004, 121, 19–35. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Clevers, J. The derivation of a simplified reflectance model for the estimation of leaf area index. Remote Sens. Environ. 1988, 25, 53–69. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W. Beyond NDVI: Extraction of Biophysical Variables from Remote Sensing Imagery. In Land Use and Land Cover Mapping in Europe; Manakos, I., Braun, M., Eds.; Springer: Dordrecht, The Netherlands, 2014; Volume 18, pp. 363–381. ISBN 978-94-0-077968-6. [Google Scholar]
- Broge, N.H.; Leblanc, E. Comparing prediction power and stability of broadband and hyperspectral vegetation indices for estimation of green leaf area index and canopy chlorophyll density. Remote Sens. Environ. 2001, 76, 156–172. [Google Scholar] [CrossRef]
- Kim, M.S.; Daughtry, C.S.T.; Chappelle, E.W.; Mcmurtrey, J.E.; Walthall, C.L. The use of high spectral resolution bands for estimating absorbed photosynthetically active radiation (Apar). In Proceedings of the Sixth Symposium on Physical Measurements and Signatures in Remote Sensing, Val D’Isere, France, 17–21 January 1994. [Google Scholar]
- Haboudane, D.; Miller, J.R.; Tremblay, N.; Zarco-Tejada, P.J.; Dextraze, L. Integrated narrow-band vegetation indices for prediction of crop chlorophyll content for application to precision agriculture. Remote Sens. Environ. 2002, 81, 416–426. [Google Scholar] [CrossRef]
- Wu, C.; Niu, Z.; Tang, Q.; Huang, W. Estimating chlorophyll content from hyperspectral vegetation indices: Modeling and validation. Agric. For. Meteorol. 2008, 148, 1230–1241. [Google Scholar] [CrossRef]
- Ciganda, V.; Gitelson, A.; Schepers, J. Non-destructive determination of maize leaf and canopy chlorophyll content. J. Plant Physiol. 2009, 166, 157–167. [Google Scholar] [CrossRef] [PubMed]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef] [PubMed]
- Guyot, G.; Baret, F. Utilisation de la haute resolution spectrale pour suivre l’etat des couverts vegetaux. In Proceedings of the 4th International Colloquium on Spectral Signatures of Objects in Remote Sensing, Aussois, France, 18–22 January 1988; Volume 287, pp. 279–286. [Google Scholar]
- Cho, M.A.; Skidmore, A.K. A new technique for extracting the red edge position from hyperspectral data: The linear extrapolation method. Remote Sens. Environ. 2006, 101, 181–193. [Google Scholar] [CrossRef]
- Dash, J.; Curran, P.J. The MERIS terrestrial chlorophyll index. Int. J. Remote Sens. 2004, 25, 5403–5413. [Google Scholar] [CrossRef]
- Van der Meij, B.; Kooistra, L.; Suomalainen, J.; Barel, J.M.; De Deyn, G.B. Remote sensing of plant trait responses to field-based plant–soil feedback using UAV-based optical sensors. Biogeosciences. 2017, 14, 733–749. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Keydan, G.P.; Merzlyak, M.N. Three-band model for noninvasive estimation of chlorophyll, carotenoids, and anthocyanin contents in higher plant leaves. Geophys. Res. Lett. 2006, 33, L11402. [Google Scholar] [CrossRef]
- Gamon, J.A.; Penuelas, J.; Field, C.B. A narrow-waveband spectral index that tracks diurnal changes in photosynthetic efficiency. Remote Sens. Environ. 1992, 41, 35–44. [Google Scholar] [CrossRef]
- Sims, D.A.; Gamon, J.A. Relationships between leaf pigment content and spectral reflectance across a wide range of species, leaf structures and developmental stages. Remote Sens. Environ. 2002, 81, 337–354. [Google Scholar] [CrossRef]
- Ustin, S.L.; Gitelson, A.A.; Jacquemoud, S.; Schaepman, M.; Asner, G.P.; Gamon, J.A.; Zarco-Tejada, P. Retrieval of foliar information about plant pigment systems from high resolution spectroscopy. Remote Sens. Environ. 2009, 113, S67–S77. [Google Scholar] [CrossRef]
- Garrity, S.R.; Eitel, J.U.H.; Vierling, L.A. Disentangling the relationships between plant pigments and the photochemical reflectance index reveals a new approach for remote estimation of carotenoid content. Remote Sens. Environ. 2011, 115, 628–635. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gamon, J.A.; Solovchenko, A. Multiple drivers of seasonal change in PRI: Implications for photosynthesis 1. Leaf level. Remote Sens. Environ. 2017, 191, 110–116. [Google Scholar] [CrossRef]
- Suárez, L.; Zarco-Tejada, P.J.; Berni, J.A.J.; González-Dugo, V.; Fereres, E. Modelling PRI for water stress detection using radiative transfer models. Remote Sens. Environ. 2009, 113, 730–744. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gamon, J.A.; Solovchenko, A. Multiple drivers of seasonal change in PRI: Implications for photosynthesis 2. Stand level. Remote Sens. Environ. 2017, 190, 198–206. [Google Scholar] [CrossRef]
- Haboudane, D. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Rouse, J., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. In Proceedings of the Third Earth Resources Technology Satellite-1 Symposium, Washington, DC, USA, 10–14 December 1973. [Google Scholar]
- Inoue, Y.; Guérif, M.; Baret, F.; Skidmore, A.; Gitelson, A.; Schlerf, M.; Darvishzadeh, R.; Olioso, A. Simple and robust methods for remote sensing of canopy chlorophyll content: A comparative analysis of hyperspectral data for different types of vegetation: Simple sensing of canopy chlorophyll content. Plant Cell Environ. 2016, 39, 2609–2623. [Google Scholar] [CrossRef] [PubMed]
- Bhattacharyya, A. On a Measure of Divergence between Two Multinomial Populations. Sankhyā Indian J. Stat. (1933–1960) 1946, 7, 401–406. [Google Scholar]
- Goffart, J.P.; Olivier, M.; Frankinet, M. Potato Crop Nitrogen Status Assessment to Improve N Fertilization Management and Efficiency: Past–Present–Future. Potato Res. 2008, 51, 355–383. [Google Scholar] [CrossRef]
- Struik, P.C. Can Physiology Help Us to Combat Late Blight in Potato? Potato Res. 2010, 53, 277–287. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Peng, Y.; Arkebauer, T.J.; Schepers, J. Relationships between gross primary production, green LAI, and canopy chlorophyll content in maize: Implications for remote sensing of primary production. Remote Sens. Environ. 2014, 144, 65–72. [Google Scholar] [CrossRef]
- Kimes, D.S. Dynamics of directional reflectance factor distributions for vegetation canopies. Appl. Opt. 1983, 22, 1364–1372. [Google Scholar] [CrossRef] [PubMed]
- Hatfield, J.L.; Gitelson, A.A.; Schepers, J.S.; Walthall, C.L. Application of Spectral Remote Sensing for Agronomic Decisions. Agron. J. 2008, 100, S-117–S-131. [Google Scholar] [CrossRef]
- Haboudane, D.; Tremblay, N.; Miller, J.R.; Vigneault, P. Remote Estimation of Crop Chlorophyll Content Using Spectral Indices Derived from Hyperspectral Data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 423–437. [Google Scholar] [CrossRef]
- Yu, K.; Lenz-Wiedemann, V.; Chen, X.; Bareth, G. Estimating leaf chlorophyll of barley at different growth stages using spectral indices to reduce soil background and canopy structure effects. ISPRS J. Photogramm. Remote Sens. 2014, 97, 58–77. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Viña, A.; Ciganda, V.; Rundquist, D.C.; Arkebauer, T.J. Remote estimation of canopy chlorophyll content in crops. Geophys. Res. Lett. 2005, 32, L08403. [Google Scholar] [CrossRef]
- Viña, A.; Gitelson, A.A.; Nguy-Robertson, A.L.; Peng, Y. Comparison of different vegetation indices for the remote assessment of green leaf area index of crops. Remote Sens. Environ. 2011, 115, 3468–3478. [Google Scholar] [CrossRef]
- Hruska, R.; Mitchell, J.; Anderson, M.; Glenn, N.F. Radiometric and Geometric Analysis of Hyperspectral Imagery Acquired from an Unmanned Aerial Vehicle. Remote Sens. 2012, 4, 2736–2752. [Google Scholar] [CrossRef]
- Habib, A.; Han, Y.; Xiong, W.; He, F.; Zhang, Z.; Crawford, M. Automated Ortho-Rectification of UAV-Based Hyperspectral Data over an Agricultural Field Using Frame RGB Imagery. Remote Sens. 2016, 8, 796. [Google Scholar] [CrossRef]
- Von Bueren, S.K.; Burkart, A.; Hueni, A.; Rascher, U.; Tuohy, M.P.; Yule, I.J. Deploying four optical UAV-based sensors over grassland: Challenges and limitations. Biogeosciences. 2015, 12, 163–175. [Google Scholar] [CrossRef]
- Bareth, G.; Aasen, H.; Bendig, J.; Gnyp, M.L.; Bolten, A.; Jung, A.; Michels, R.; Soukkamäki, J. Low-weight and UAV-based hyperspectral full-frame cameras for monitoring crops: Spectral comparison with portable spectroradiometer measurements. Photogramm. Fernerkund. Geoinf. 2015, 2015, 69–79. [Google Scholar] [CrossRef]
- Jakob, S.; Zimmermann, R.; Gloaguen, R. The Need for Accurate Geometric and Radiometric Corrections of Drone-Borne Hyperspectral Data for Mineral Exploration: MEPHySTo—A Toolbox for Pre-Processing Drone-Borne Hyperspectral Data. Remote Sens. 2017, 9, 88. [Google Scholar] [CrossRef]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- Tattaris, M.; Reynolds, M.P.; Chapman, S.C. A Direct Comparison of Remote Sensing Approaches for High-Throughput Phenotyping in Plant Breeding. Front. Plant Sci. 2016, 7. [Google Scholar] [CrossRef] [PubMed]
- Lelong, C.C.D.; Burger, P.; Jubelin, G.; Roux, B.; Labbé, S.; Baret, F. Assessment of Unmanned Aerial Vehicles Imagery for Quantitative Monitoring of Wheat Crop in Small Plots. Sensors 2008, 8, 3557–3585. [Google Scholar] [CrossRef] [PubMed]
- Dorigo, W.A. Improving the Robustness of Cotton Status Characterisation by Radiative Transfer Model Inversion of Multi-Angular CHRIS/PROBA Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 18–29. [Google Scholar] [CrossRef]
- Cowley, R.B.; Luckett, D.J.; Moroni, J.S.; Diffey, S. Use of remote sensing to determine the relationship of early vigour to grain yield in canola (Brassica napus L.) germplasm. Crop Pasture Sci. 2014, 65, 1288–1299. [Google Scholar] [CrossRef]
- Nigon, T.J.; Mulla, D.J.; Rosen, C.J.; Cohen, Y.; Alchanatis, V.; Knight, J.; Rud, R. Hyperspectral aerial imagery for detecting nitrogen stress in two potato cultivars. Comput. Electron. Agric. 2015, 112, 36–46. [Google Scholar] [CrossRef]
- Sugiura, R.; Tsuda, S.; Tamiya, S.; Itoh, A.; Nishiwaki, K.; Murakami, N.; Shibuya, Y.; Hirafuji, M.; Nuske, S. Field phenotyping system for the assessment of potato late blight resistance using RGB imagery from an unmanned aerial vehicle. Biosyst. Eng. 2016, 148, 1–10. [Google Scholar] [CrossRef]
- Vergara-Díaz, O.; Zaman-Allah, M.A.; Masuka, B.; Hornero, A.; Zarco-Tejada, P.; Prasanna, B.M.; Cairns, J.E.; Araus, J.L. A Novel Remote Sensing Approach for Prediction of Maize Yield Under Different Conditions of Nitrogen Fertilization. Front. Plant Sci. 2016, 7, 666. [Google Scholar] [CrossRef] [PubMed]
- Van Evert, F.K.; Booij, R.; Jukema, J.N.; ten Berge, H.F.M.; Uenk, D.; Meurs, E.J.J. (Bert); van Geel, W.C.A.; Wijnholds, K.H.; Slabbekoorn, J.J. (Hanja). Using crop reflectance to determine sidedress N rate in potato saves N and maintains yield. Eur. J. Agron. 2012, 43, 58–67. [Google Scholar] [CrossRef]
- Johnson, D.A.; Hamm, P.B.; Miller, J.S.; Porter, L.D. Late Blight Epidemics in the Columbia Basin. In Sustainable Potato Production: Global Case Studies; He, Z., Larkin, R., Honeycutt, W., Eds.; Springer: Dordrecht, The Netherlands, 2012; pp. 141–162. ISBN 978-9-40-074103-4. [Google Scholar]
- Termorshuizen, A.J. Chapter 29—Fungal and Fungus-Like Pathogens of Potato. In Potato Biology and Biotechnology; Elsevier Science B.V.: Amsterdam, The Netherlands, 2007; pp. 643–665. ISBN 978-0-44-451018-1. [Google Scholar]
- Cooke, L.R.; Schepers, H.T.A.M.; Hermansen, A.; Bain, R.A.; Bradshaw, N.J.; Ritchie, F.; Shaw, D.S.; Evenhuis, A.; Kessel, G.J.T.; Wander, J.G.N.; et al. Epidemiology and Integrated Control of Potato Late Blight in Europe. Potato Res. 2011, 54, 183–222. [Google Scholar] [CrossRef]
- Lammerts van Bueren, E.T.; Tiemens-Hulscher, M.; Struik, P.C. Cisgenesis Does Not Solve the Late Blight Problem of Organic Potato Production: Alternative Breeding Strategies. Potato Res. 2008, 51, 89–99. [Google Scholar] [CrossRef]
- Bouws, H.; Finckh, M.R. Effects of strip intercropping of potatoes with non-hosts on late blight severity and tuber yield in organic production. Plant Pathol. 2008, 57, 916–927. [Google Scholar] [CrossRef]
- Tiemens-Hulscher, M.; van Bueren, E.T.L.; Struik, P.C. Identifying nitrogen-efficient potato cultivars for organic farming. Euphytica 2014, 199, 137–154. [Google Scholar] [CrossRef]
- Melander, B.; Rasmussen, I.A.; Bàrberi, P. Integrating physical and cultural methods of weed control—Examples from European research. Weed Sci. 2005, 53, 369–381. [Google Scholar] [CrossRef]
- López-Granados, F. Weed detection for site-specific weed management: Mapping and real-time approaches: Weed detection for site-specific weed management. Weed Res. 2011, 51, 1–11. [Google Scholar] [CrossRef]
- López-Granados, F.; Peña-Barragán, J.M.; Jurado-Expósito, M.; Francisco-Fernández, M.; Cao, R.; Alonso-Betanzos, A.; Fontenla-Romero, O. Multispectral classification of grass weeds and wheat (Triticum durum) using linear and nonparametric functional discriminant analysis and neural networks. Weed Res. 2008, 48, 28–37. [Google Scholar] [CrossRef]
- Hung, C.; Xu, Z.; Sukkarieh, S. Feature Learning Based Approach for Weed Classification Using High Resolution Aerial Images from a Digital Camera Mounted on a UAV. Remote Sens. 2014, 6, 12037–12054. [Google Scholar] [CrossRef]
- Behmann, J.; Mahlein, A.-K.; Rumpf, T.; Römer, C.; Plümer, L. A review of advanced machine learning methods for the detection of biotic stress in precision crop protection. Precis. Agric. 2015, 16, 239–260. [Google Scholar] [CrossRef]
- Pérez-Ortiz, M.; Peña, J.M.; Gutiérrez, P.A.; Torres-Sánchez, J.; Hervás-Martínez, C.; López-Granados, F. Selecting patterns and features for between- and within- crop-row weed mapping using UAV-imagery. Expert Syst. Appl. 2016, 47, 85–94. [Google Scholar] [CrossRef]
- Berni, J.; Zarco-Tejada, P.J.; Suarez, L.; Fereres, E. Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring From an Unmanned Aerial Vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Hunt, E.R., Jr.; Doraiswamy, P.C.; McMurtrey, J.E.; Daughtry, C.S.T.; Perry, E.M.; Akhmedov, B. A visible band index for remote sensing leaf chlorophyll content at the canopy scale. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 103–112. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Morales, A.; Testi, L.; Villalobos, F.J. Spatio-temporal patterns of chlorophyll fluorescence and physiological and structural indices acquired from hyperspectral imagery as compared with carbon fluxes measured with eddy covariance. Remote Sens. Environ. 2013, 133, 102–115. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.-J.; Torres-Sánchez, J.; Clavero-Rumbao, I.; García-Ferrer, A.; Peña, J.-M.; Borra-Serrano, I.; López-Granados, F. Assessing Optimal Flight Parameters for Generating Accurate Multispectral Orthomosaicks by UAV to Support Site-Specific Crop Management. Remote Sens. 2015, 7, 12793–12814. [Google Scholar] [CrossRef]
- Imukova, K.; Ingwersen, J.; Streck, T. Determining the spatial and temporal dynamics of the green vegetation fraction of croplands using high-resolution RapidEye satellite images. Agric. For. Meteorol. 2015, 206, 113–123. [Google Scholar] [CrossRef]
- Svensgaard, J.; Roitsch, T.; Christensen, S. Development of a Mobile Multispectral Imaging Platform for Precise Field Phenotyping. Agronomy 2014, 4, 322–336. [Google Scholar] [CrossRef]
- Verrelst, J.; Alonso, L.; Camps-Valls, G.; Delegido, J.; Moreno, J. Retrieval of Vegetation Biophysical Parameters Using Gaussian Process Techniques. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1832–1843. [Google Scholar] [CrossRef]
- Nebiker, S.; Lack, N.; Abächerli, M.; Läderach, S. Light-weight multispectral UAV sensors and their capabilities for predicting grain yield and detecting plant diseases. In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech Repulic, 12–19 July 2016; Volume XLI-B1; pp. 963–970. [Google Scholar]
- Whitehead, K.; Hugenholtz, C.H.; Myshak, S.; Brown, O.; LeClair, A.; Tamminga, A.; Barchyn, T.E.; Moorman, B.; Eaton, B. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 2: Scientific and commercial applications. J. Unmanned Veh. Syst. 2014, 2, 86–102. [Google Scholar] [CrossRef]
- Prashar, A.; Jones, H.G. Infra-Red Thermography as a High-Throughput Tool for Field Phenotyping. Agronomy 2014, 4, 397–417. [Google Scholar] [CrossRef]
- Ray, S.S.; Jain, N.; Arora, R.K.; Chavan, S.; Panigrahy, S. Utility of Hyperspectral Data for Potato Late Blight Disease Detection. J. Indian Soc. Remote Sens. 2011, 39, 161–169. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, X.; O’Neill, M. Spectral discrimination of Phytophthora infestans infection on tomatoes based on principal component and cluster analyses. Int. J. Remote Sens. 2002, 23, 1095–1107. [Google Scholar] [CrossRef]
- Zhang, M.; Qin, Z.; Liu, X.; Ustin, S.L. Detection of stress in tomatoes induced by late blight disease in California, USA, using hyperspectral remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2003, 4, 295–310. [Google Scholar] [CrossRef]
- Zhang, M.; Qin, Z. Spectral analysis of tomato late blight infections for remote sensing of tomato disease stress in California. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium (IGARSS’04), Anchorage, AK, USA, 20–24 September 2004; Volume 6, pp. 4091–4094. [Google Scholar]
- Zhang, M.; Qin, Z.; Liu, X. Remote Sensed Spectral Imagery to Detect Late Blight in Field Tomatoes. Precis. Agric. 2005, 6, 489–508. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, M.; Zhu, J.; Geng, S. Spectral prediction of Phytophthora infestans infection on tomatoes using artificial neural network (ANN). Int. J. Remote Sens. 2008, 29, 1693–1706. [Google Scholar] [CrossRef]
- Xie, C.; Shao, Y.; Li, X.; He, Y. Detection of early blight and late blight diseases on tomato leaves using hyperspectral imaging. Sci. Rep. 2015, 5, 16564. [Google Scholar] [CrossRef] [PubMed]


| Date | DAP | Growth Stage 1 | GDD 2 | Flight Time | SZA 3 | SAA 3 | Illum. |
|---|---|---|---|---|---|---|---|
| 05 June 2015 | 43 | 3–4 | 235.7 | 13:24 | 29.5 | 174.5 | Clear |
| 24 June 2015 | 62 | 4–5 | 368.9 | 09:49 | 52.0 | 100.4 | Overcast |
| 07 July 2015 | 75 | 6–7 | 541.7 | 10:16 | 49.0 | 106.6 | Clear |
| 16 July 2015 | 84 | 8–9 | 631.2 | 10:57 | 44.3 | 117.7 | Clear |
| 31 July 2015 | 99 | 9 | 774.7 | 12:15 | 37.9 | 144.3 | Clear |
| Vegetation Index | Formulation 1 | Spectral Bands (Centre-nm) | Sensitive to (Scale) 2 | Ref. | |
|---|---|---|---|---|---|
| Ground | UAV | ||||
| NDVI | 670, 780 | 670, 800 | chl, LAI, chl × LAI (L, C) | [68] | |
| WDVI | 670, 870 | 670, 870 | LAI (C) | [47] | |
| OSAVI | 670, 780 | 670, 800 | chl, LAI, chl × LAI (L, C) | [46] | |
| MCARI | 550, 670, 700 | 550, 670, 700 | chl (L) | [20] | |
| TCARI | 550, 670, 700 | 550, 670, 700 | chl (L) | [49] | |
| MCARI/OSAVI | 550, 670, 700, 780 | 550, 670, 700, 800 | chl (L) | [20] | |
| TCARI/OSAVI | 550, 670, 700, 780 | 550, 670, 700, 800 | chl (L) | [51] | |
| MCARIre | 550, 700, 750 | 550, 705, 750 | chl (L) | [52] | |
| MCARI/OSAVIre | 550, 700, 750 | 550, 705, 750 | chl (L) | [52] | |
| TCARI/OSAVIre | 550, 700, 750 | 550, 705, 750 | chl (L) | [52] | |
| CIre | 710, 780 | 710, 780 | chl (L) | [54,59] | |
| CIg | 710, 750 | 710, 750 | chl (L) | [54,59] | |
| MCARI2 | 550, 670, 780 | 550, 670, 800 | LAI (C) | [67] | |
| REP | 670, 700, 740, 780 | 670, 700, 740, 780 | chl, LAI, chl × LAI (L, C) | [55] | |
| MTCI | 670, 710, 750 | 680, 710, 755 | chl, LAI, chl × LAI (L, C) | [57] | |
| PRI | 530, 570 | 530, 570 | xan, car, car/chl, LAI (L, C) | [60] | |
| Vegetation Indices | UAV Measurements | |||||||
|---|---|---|---|---|---|---|---|---|
| Leaf Chlorophyll | Leaf Area Index | Canopy Chlorophyll | Ground Cover | |||||
| R2 | RMSE 1 | R2 | RMSE 1 | R2 | RMSE 1 | R2 | RMSE 1 | |
| NDVI | 0.19 | 9.42 | 0.68 | 0.69 | 0.39 | 0.375 | 0.71 | 0.069 |
| WDVI | 0.00 | 10.44 | 0.55 | 0.81 | 0.65 | 0.279 | 0.74 | 0.066 |
| OSAVI | 0.04 | 10.24 | 0.69 | 0.67 | 0.58 | 0.309 | 0.82 | 0.055 |
| MCARI | 0.37 | 8.18 | 0.60 | 0.78 | 0.13 | 0.445 | 0.44 | 0.098 |
| TCARI | 0.27 | 8.89 | 0.70 | 0.67 | 0.27 | 0.407 | 0.66 | 0.077 |
| MCARI/OSAVI | 0.57 | 6.63 | 0.35 | 0.99 | 0.00 | 0.480 | 0.17 | 0.120 |
| TCARI/OSAVI | 0.63 | 6.07 | 0.09 | 1.19 | 0.07 | 0.465 | 0.02 | 0.132 |
| MCARIre | 0.03 | 10.10 | 0.31 | 1.02 | 0.59 | 0.303 | 0.55 | 0.088 |
| MCARI/OSAVIre | 0.02 | 10.18 | 0.37 | 0.97 | 0.63 | 0.287 | 0.61 | 0.082 |
| TCARI/OSAVIre | 0.03 | 10.11 | 0.16 | 1.12 | 0.43 | 0.353 | 0.35 | 0.105 |
| CIre | 0.00 | 10.37 | 0.41 | 0.94 | 0.61 | 0.295 | 0.62 | 0.081 |
| CIg | 0.02 | 10.21 | 0.47 | 0.87 | 0.73 | 0.241 | 0.68 | 0.074 |
| MCARI2 | 0.03 | 10.31 | 0.67 | 0.69 | 0.59 | 0.300 | 0.81 | 0.056 |
| REP | 0.14 | 9.40 | 0.27 | 1.04 | 0.68 | 0.267 | 0.52 | 0.092 |
| MTCI | 0.19 | 9.04 | 0.18 | 1.11 | 0.61 | 0.297 | 0.41 | 0.101 |
| PRI | 0.00 | 10.40 | 0.04 | 1.21 | 0.08 | 0.456 | 0.11 | 0.122 |
| Ground-Based Measurements | ||||||||
| NDVI | 0.10 | 9.63 | 0.41 | 0.92 | 0.60 | 0.295 | 0.64 | 0.077 |
| WDVI | 0.18 | 9.11 | 0.27 | 1.03 | 0.58 | 0.291 | 0.54 | 0.087 |
| OSAVI | 0.15 | 9.34 | 0.35 | 0.96 | 0.61 | 0.288 | 0.61 | 0.081 |
| MCARI | 0.03 | 10.22 | 0.50 | 0.85 | 0.34 | 0.385 | 0.72 | 0.068 |
| TCARI | 0.01 | 10.32 | 0.47 | 0.88 | 0.36 | 0.374 | 0.72 | 0.069 |
| MCARI/OSAVI | 0.18 | 9.29 | 0.43 | 0.92 | 0.14 | 0.441 | 0.56 | 0.087 |
| TCARI/OSAVI | 0.26 | 8.81 | 0.27 | 1.04 | 0.04 | 0.469 | 0.35 | 0.104 |
| MCARIre | 0.19 | 9.01 | 0.23 | 1.06 | 0.61 | 0.284 | 0.49 | 0.093 |
| MCARI/OSAVIre | 0.20 | 8.96 | 0.24 | 1.05 | 0.62 | 0.279 | 0.51 | 0.092 |
| TCARI/OSAVIre | 0.23 | 8.75 | 0.20 | 1.08 | 0.62 | 0.282 | 0.43 | 0.099 |
| CIre | 0.32 | 8.29 | 0.21 | 1.08 | 0.62 | 0.281 | 0.39 | 0.101 |
| CIg | 0.44 | 7.43 | 0.11 | 1.15 | 0.52 | 0.318 | 0.26 | 0.113 |
| MCARI2 | 0.10 | 9.65 | 0.38 | 0.93 | 0.61 | 0.284 | 0.66 | 0.076 |
| REP | 0.38 | 7.82 | 0.07 | 1.19 | 0.42 | 0.360 | 0.12 | 0.124 |
| MTCI | 0.46 | 7.25 | 0.10 | 1.16 | 0.53 | 0.319 | 0.23 | 0.116 |
| PRI | 0.06 | 10.04 | 0.05 | 1.20 | 0.01 | 0.479 | 0.12 | 0.124 |
| Traits | UAV Measurements | ||
|---|---|---|---|
| Vegetation Index | R2 | RMSE 1 | |
| Leaf chlorophyll | MTCI | 0.91 | 2.31 |
| Leaf area index | TCARI | 0.56 | 0.68 |
| Canopy chlorophyll | CIg | 0.81 | 0.201 |
| Ground cover | NDVI | 0.90 | 0.037 |
| Ground-Based Measurements | |||
| Leaf chlorophyll | TCARI/OSAVIre | 0.78 | 3.52 |
| Leaf area index | OSAVI | 0.58 | 0.63 |
| Canopy chlorophyll | CIg | 0.83 | 0.194 |
| Ground cover | OSAVI | 0.92 | 0.033 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Domingues Franceschini, M.H.; Bartholomeus, H.; Van Apeldoorn, D.; Suomalainen, J.; Kooistra, L. Intercomparison of Unmanned Aerial Vehicle and Ground-Based Narrow Band Spectrometers Applied to Crop Trait Monitoring in Organic Potato Production. Sensors 2017, 17, 1428. https://doi.org/10.3390/s17061428
Domingues Franceschini MH, Bartholomeus H, Van Apeldoorn D, Suomalainen J, Kooistra L. Intercomparison of Unmanned Aerial Vehicle and Ground-Based Narrow Band Spectrometers Applied to Crop Trait Monitoring in Organic Potato Production. Sensors. 2017; 17(6):1428. https://doi.org/10.3390/s17061428
Chicago/Turabian StyleDomingues Franceschini, Marston Héracles, Harm Bartholomeus, Dirk Van Apeldoorn, Juha Suomalainen, and Lammert Kooistra. 2017. "Intercomparison of Unmanned Aerial Vehicle and Ground-Based Narrow Band Spectrometers Applied to Crop Trait Monitoring in Organic Potato Production" Sensors 17, no. 6: 1428. https://doi.org/10.3390/s17061428
APA StyleDomingues Franceschini, M. H., Bartholomeus, H., Van Apeldoorn, D., Suomalainen, J., & Kooistra, L. (2017). Intercomparison of Unmanned Aerial Vehicle and Ground-Based Narrow Band Spectrometers Applied to Crop Trait Monitoring in Organic Potato Production. Sensors, 17(6), 1428. https://doi.org/10.3390/s17061428