
Joint Estimation of Source Range and Depth Using a Bottom-Deployed Vertical Line Array in Deep Water

Abstract
:1. Introduction
2. Theory and Simulation
2.1 Range Estimation Method
2.2 Depth Estimation Scheme
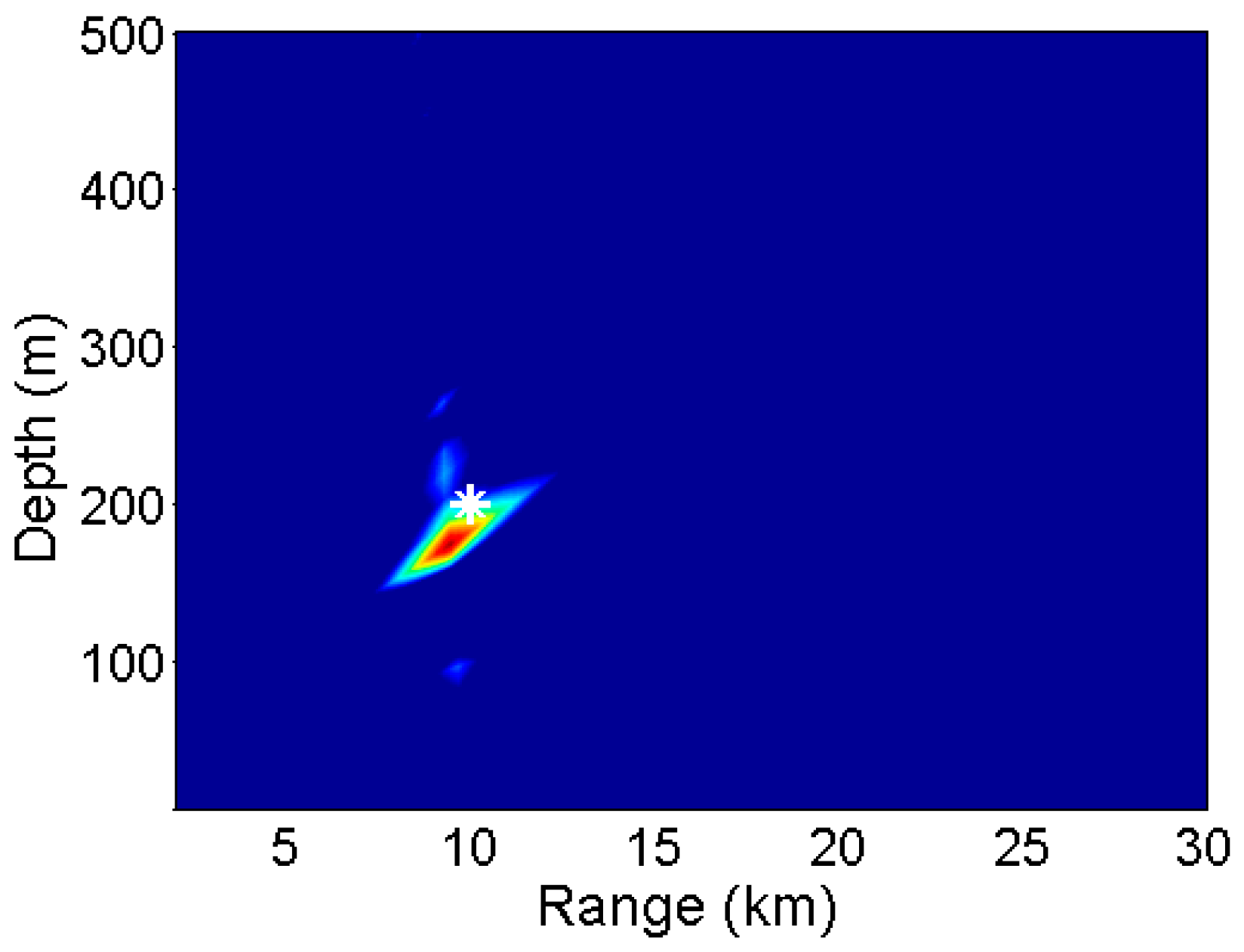
2.3 Joint Estimation of Source Range and Depth
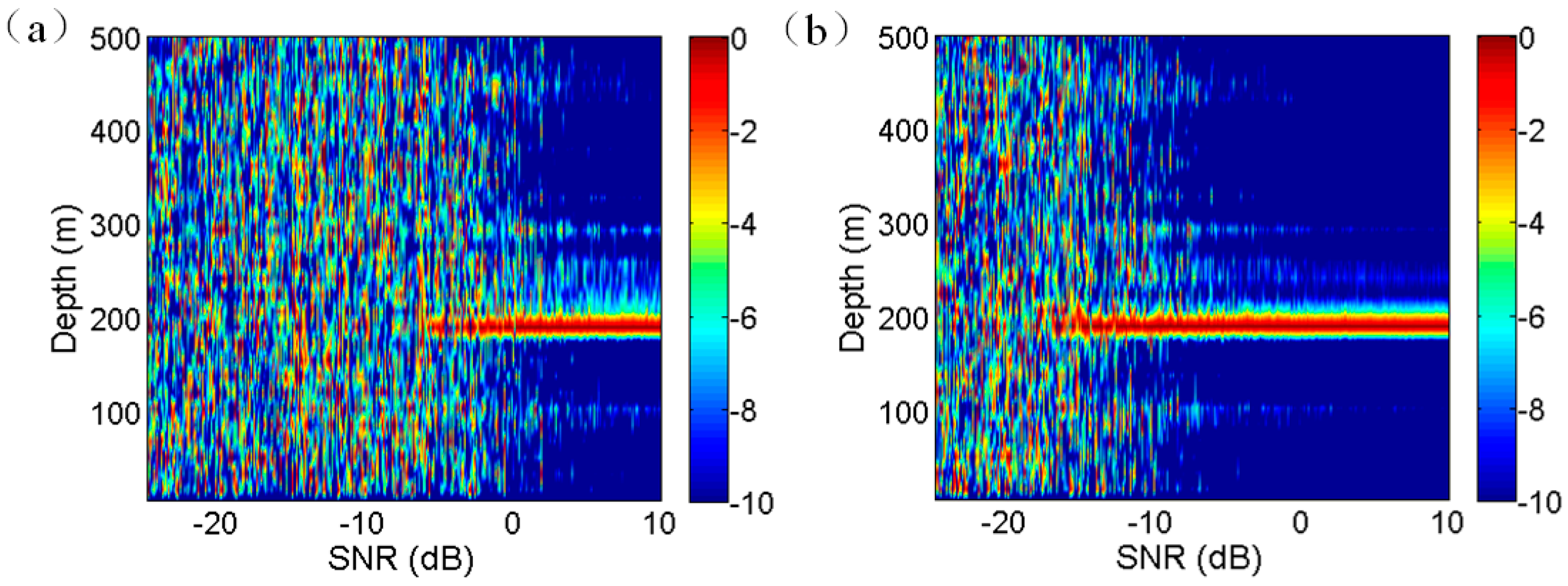
2.4 Effects of SNR
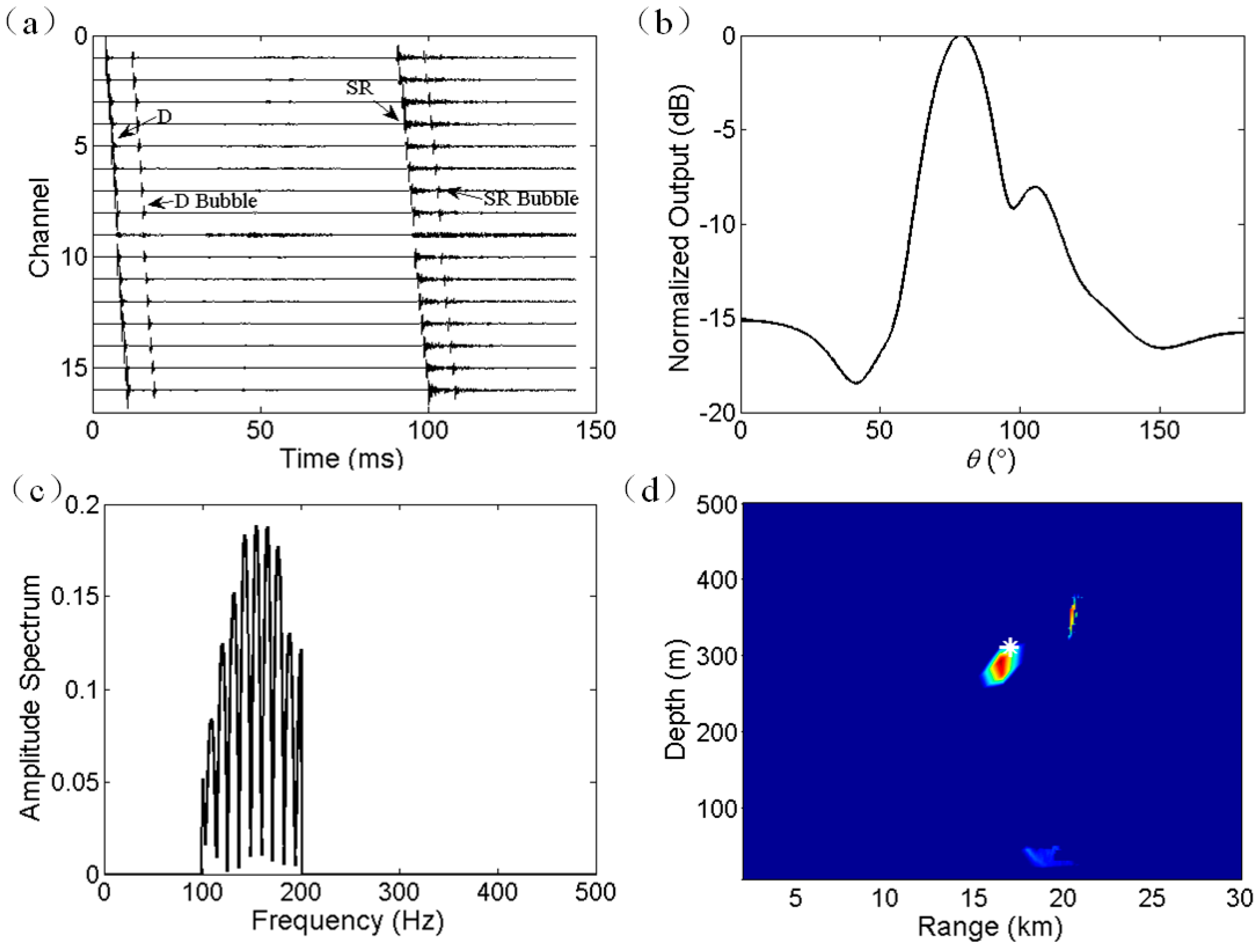
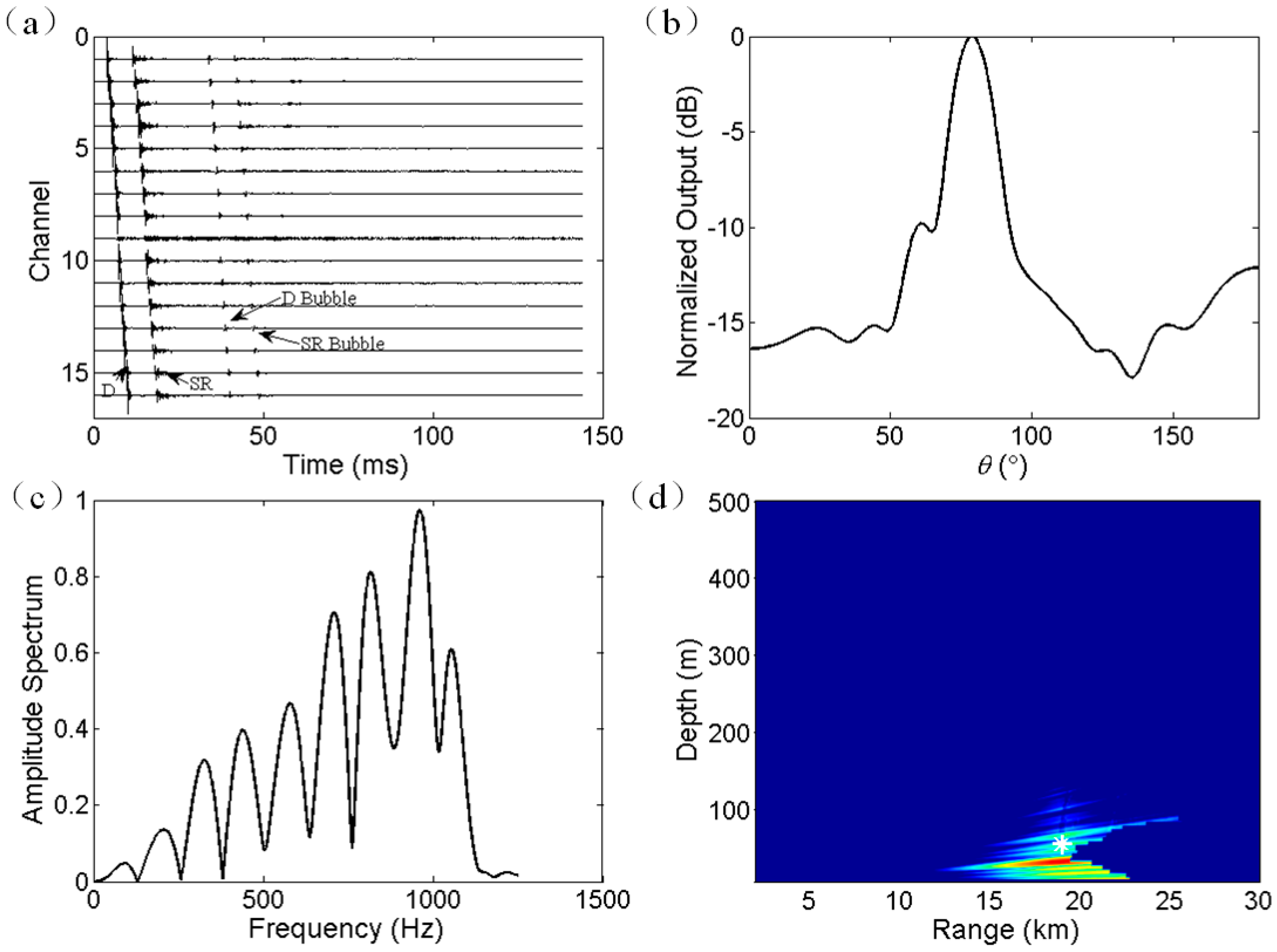
3. Experimental Verification
4. Performance Metrics
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Thompson, S.R. Sound Propagation Considerations for a Deep-Ocean Acoustic Network. Master’s Thesis, Naval Postgraduate School, Monterey, CA, USA, 2009. [Google Scholar]
- Duan, R.; Yang, K.; Ma, Y.; Lei, B. A reliable acoustic path: Physical properties and a source localization method. Chin. Phys. B 2012, 21, 124301. [Google Scholar] [CrossRef]
- Baggeroer, A.B.; Scheer, E.K.; Heaney, K.; Spain, G.D.; Worcester, P.; Dzieciuch, M. Reliable acoustic path and convergence zone bottom interaction in the Philippine Sea 09 Experiment. J. Acoust. Soc. Am. 2010, 128, 2385. [Google Scholar] [CrossRef]
- Duan, R.; Yang, K.; Ma, Y.; Yang, Q.; Li, H. Moving source localization with a single hydrophone using multipath time delays in the deep ocean. J. Acoust. Soc. Am. 2014, 136, EL159–EL165. [Google Scholar] [CrossRef] [PubMed]
- Yang, K.; Li, H.; Duan, R.; Yang, Q. Analysis on the characteristic of cross-correlated field and its potential application on source localization in deep water. J. Comp. Acoust. 2017, 25, 1750001-1–1750001-15. [Google Scholar] [CrossRef]
- Lei, Z.; Yang, K.; Ma, Y. Passive localization in the deep ocean based on cross-correlation function matching. J. Acoust. Soc. Am. 2016, 139, EL196–EL201. [Google Scholar] [CrossRef] [PubMed]
- McCargar, R.; Zurk, L.M. Depth-based signal separation with vertical line arrays in the deep ocean. J. Acoust. Soc. Am. 2013, 133, EL320–EL325. [Google Scholar] [CrossRef] [PubMed]
- Kniffin, G.P.; Boyle, J.K.; Zurk, L.M.; Siderius, M. Performance metrics for depth-based signal separation using deep vertical line arrays. J. Acoust. Soc. Am. 2016, 139, 418–425. [Google Scholar] [CrossRef] [PubMed]
- Voltz, P.; Lu, I. A time-domain backpropagating ray technique for source localization. J. Acoust. Soc. Am. 1994, 95, 805–812. [Google Scholar] [CrossRef]
- Skarsoulis, E.K.; Kalogerakis, M.A. Ray-theoretic localization of an impulsive source in a stratified ocean using two hydrophones. J. Acoust. Soc. Am. 2005, 118, 2934–2943. [Google Scholar] [CrossRef]
- Jesus, S.M.; Porter, M.B.; Stephan, Y.; Demoulin, X.; Rodriguez, O.C.; Coelho, E.M.M.F. Single hydrophone source localization. IEEE J. Ocean. Eng. 2000, 25, 337–346. [Google Scholar] [CrossRef]
- Duan, R.; Yang, K.; Ma, Y. Narrowband source localisation in the deep ocean using a near-surface array. Acoust. Aust. 2014, 42, 36–42. [Google Scholar]
- Baggeroer, A.B.; Kuperman, W.A.; Mikhalevsky, P.N. An overview of matched field methods in ocean acoustics. IEEE J. Ocean. Eng. 1993, 18, 401–424. [Google Scholar] [CrossRef]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics; Springer: Berlin, Germany, 2011. [Google Scholar]
- Yang, K.; Li, H.; He, C.; Duan, R. Error analysis on bearing estimation of a towed array to a far-field source in deep water. Acoust. Aust. 2016, 44, 429–437. [Google Scholar] [CrossRef]
- Porter, M.B. The BELLHOP Manual and User’s Guide: Preliminary and Draft; Heat, Light and Sound Research Inc.: La Jolla, CA, USA, 2011. [Google Scholar]
- Sun, M.; Zhou, S.; Li, Z. Analysis of sound propagation in the direct-arrival zone in deep water with a vector sensor and its application. Acta Phys. Sin. 2016, 65, 094302-1–094302-9. [Google Scholar]
- Reeder, D.B. Clutter depth discrimination using the wavenumber spectrum. J. Acoust. Soc. Am. 2014, 135, EL1–EL7. [Google Scholar] [CrossRef] [PubMed]
- Rakotonarivo, S.T.; Kuperman, W.A. Model-independent range localization of a moving source in shallow water. J. Acoust. Soc. Am. 2012, 132, 2218–2223. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Zurk, L.M.; Ma, B. Vertical arrival structure of shipping noise in deep water channels. In Proceedings of the OCEANS 2010 MTS/IEEE, Seattle, WA, USA, 20–23 September 2010. [Google Scholar]
- Chapman, N.R. Measurement of the waveform parameters of shallow explosive charges. J. Acoust. Soc. Am. 1985, 78, 672–681. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Theoretical Value | Estimated Value | ||
|---|---|---|---|
| Range (km) | Depth (m) | Range (km) | Depth (m) |
| 5 | 100 | 4.9 | 97 |
| 200 | 4.8 | 196 | |
| 300 | 4.7 | 295 | |
| 10 | 100 | 9.9 | 90 |
| 200 | 9.7 | 183 | |
| 300 | 9.7 | 289 | |
| 15 | 100 | 14.9 | 85 |
| 200 | 14.8 | 180 | |
| 300 | 14.7 | 280 | |
| 20 | 100 | 19.8 | 50 * |
| 200 | 19.8 | 145 * | |
| 300 | 19.7 | 255 * | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Yang, K.; Duan, R.; Lei, Z. Joint Estimation of Source Range and Depth Using a Bottom-Deployed Vertical Line Array in Deep Water. Sensors 2017, 17, 1315. https://doi.org/10.3390/s17061315
Li H, Yang K, Duan R, Lei Z. Joint Estimation of Source Range and Depth Using a Bottom-Deployed Vertical Line Array in Deep Water. Sensors. 2017; 17(6):1315. https://doi.org/10.3390/s17061315
Chicago/Turabian StyleLi, Hui, Kunde Yang, Rui Duan, and Zhixiong Lei. 2017. "Joint Estimation of Source Range and Depth Using a Bottom-Deployed Vertical Line Array in Deep Water" Sensors 17, no. 6: 1315. https://doi.org/10.3390/s17061315
APA StyleLi, H., Yang, K., Duan, R., & Lei, Z. (2017). Joint Estimation of Source Range and Depth Using a Bottom-Deployed Vertical Line Array in Deep Water. Sensors, 17(6), 1315. https://doi.org/10.3390/s17061315