
Spatial Characterization of Radio Propagation Channel in Urban Vehicle-to-Infrastructure Environments to Support WSNs Deployment

 ,
,  ,
,  , ,
, ,  ,
,  and
and 
Abstract
:1. Introduction
2. Background
Ray Launching (RL) Technique
- Phase 1: Creating the scenario. This phase sets the scenario, considering all the obstacles within the environment, and the transmitters and receivers.
- Phase 2: Simulation of RL in 3D. In this phase, rays are launched from each transmitter, keeping the parameters in each position in space.
- Phase 3: Analysis of the results. In this phase, the values are obtained from the simulation to calculate the desired parameters.
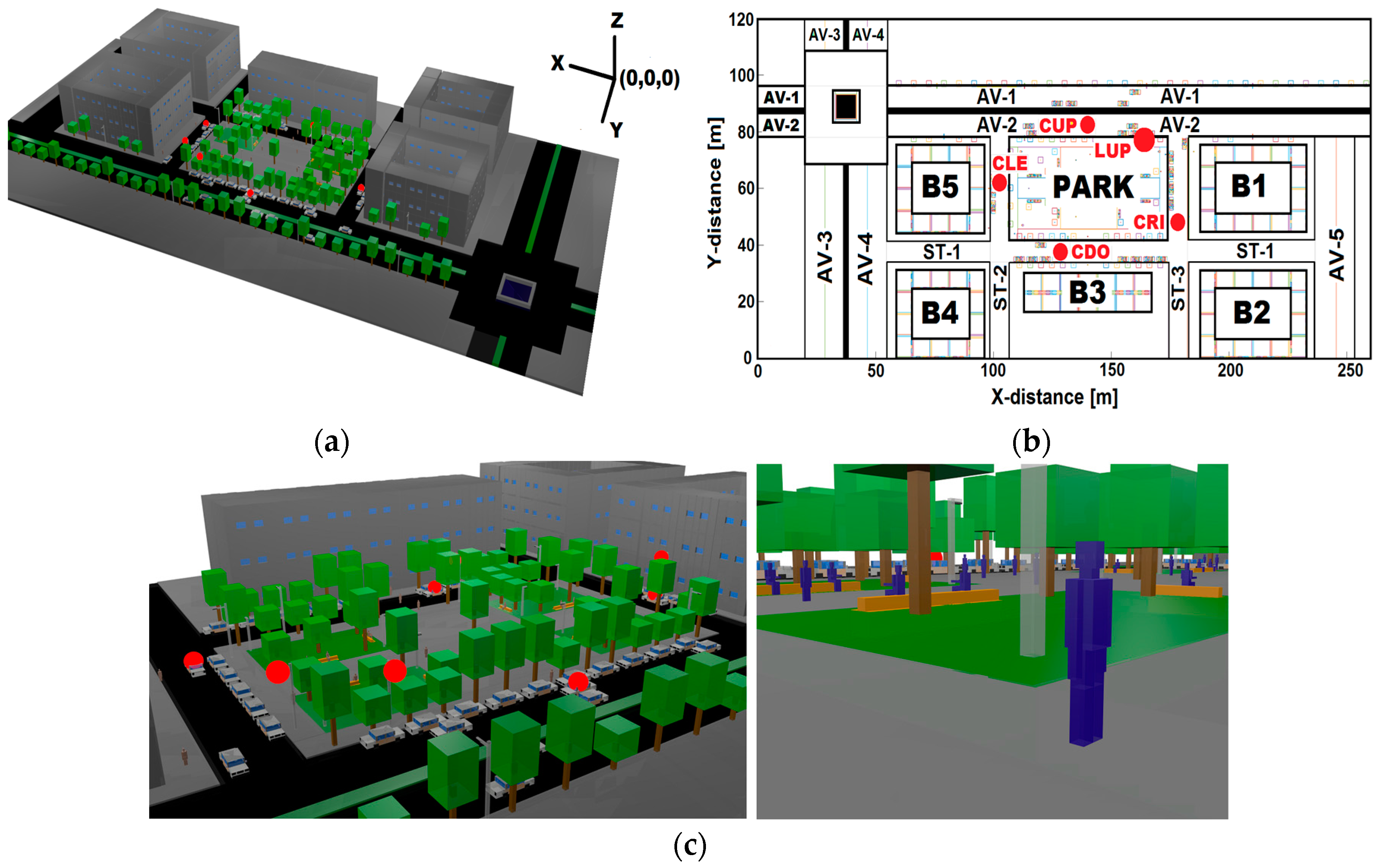
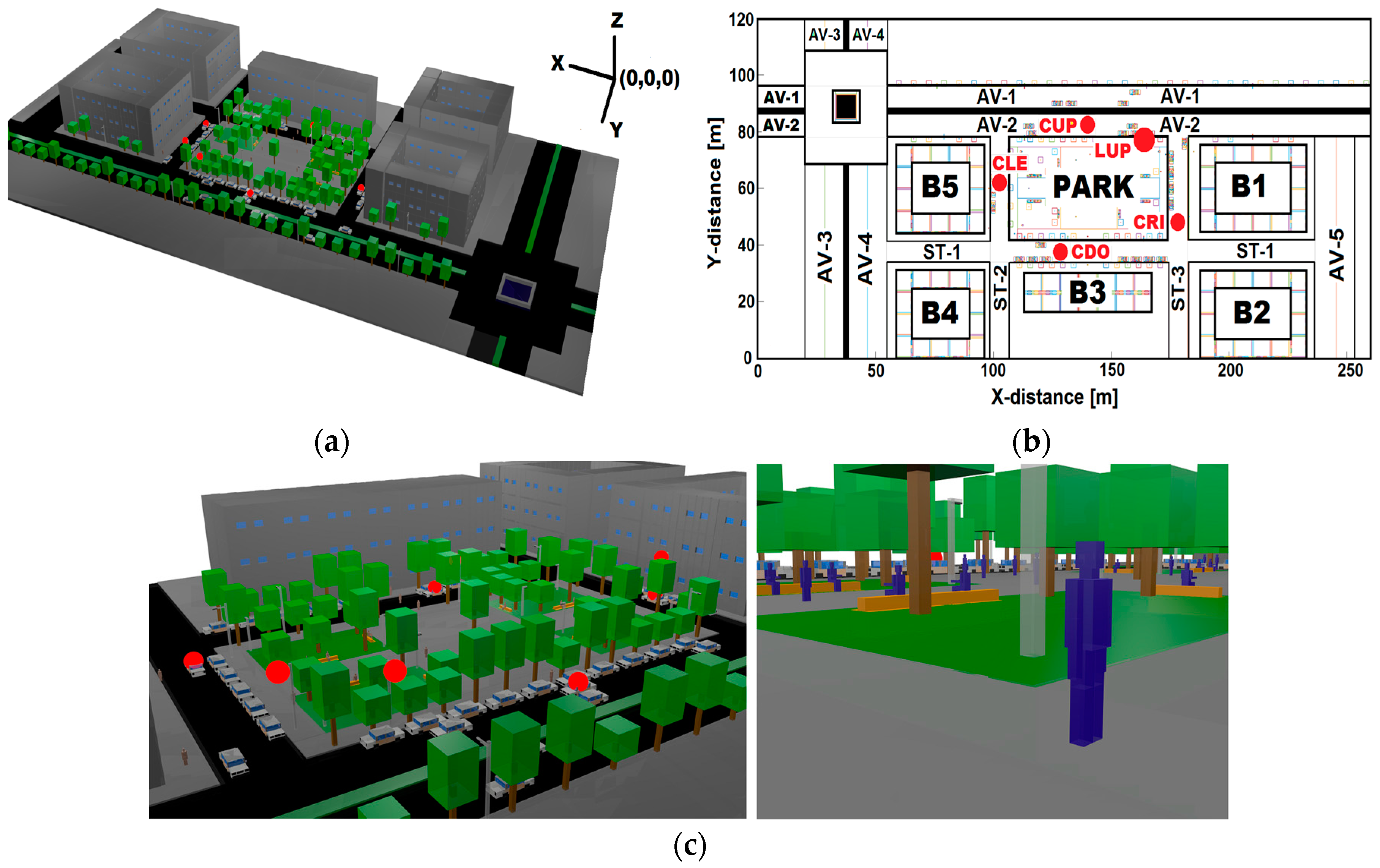
3. Simulated Urban Scenario
4. Results
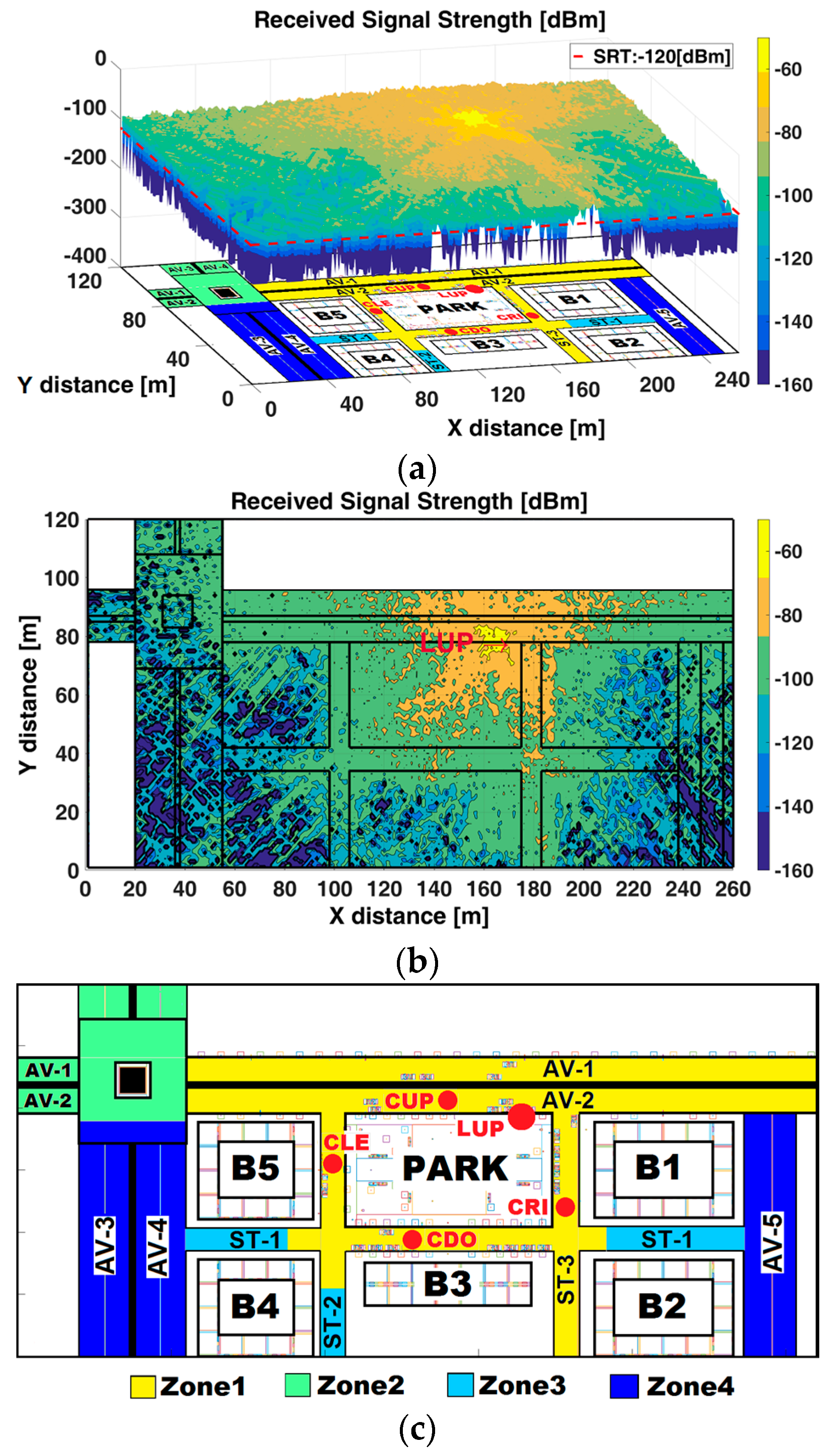
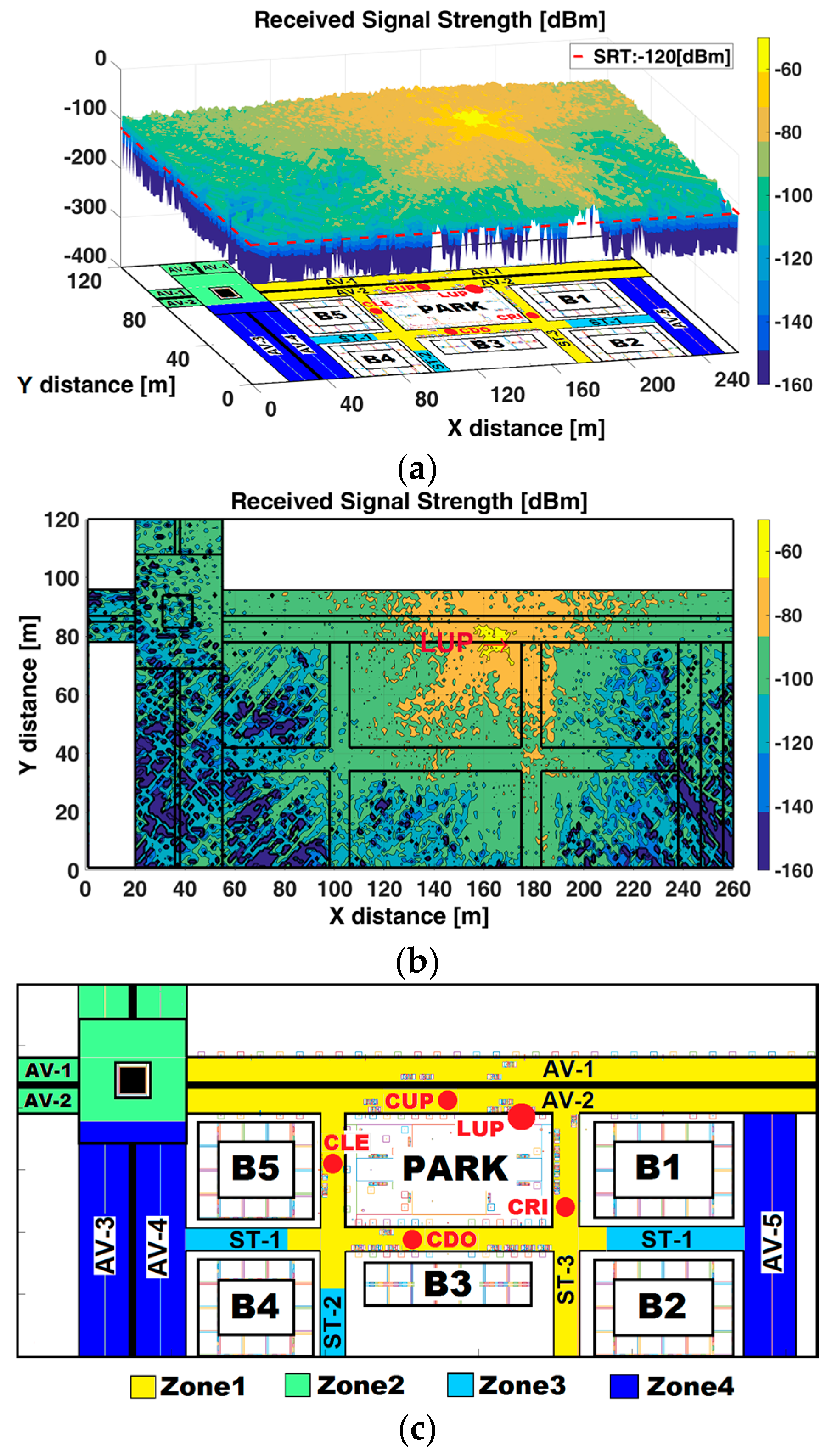
4.1. Received Signal Strength (RSS)
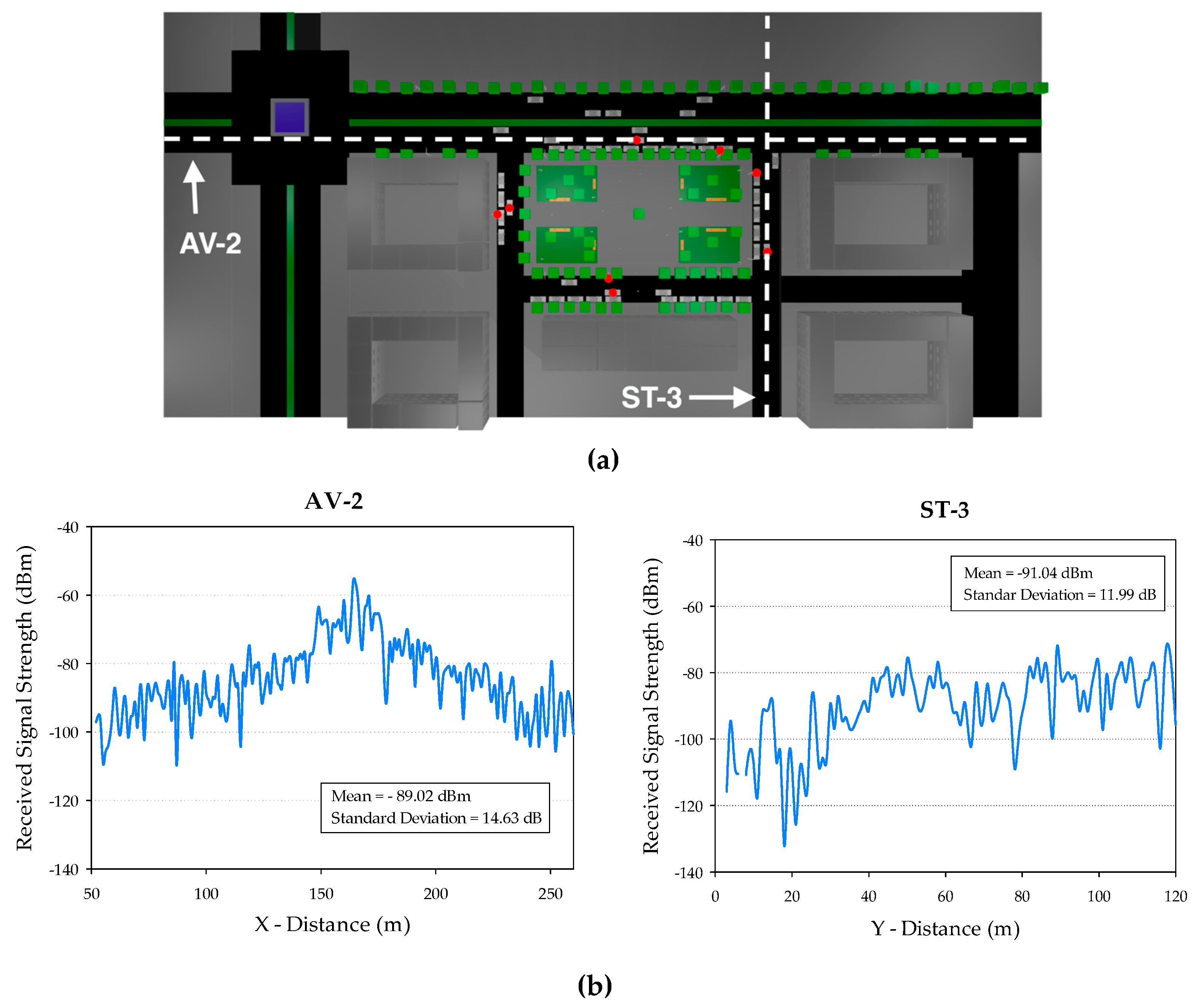
- Zone 1 (yellow colored in Figure 2c) is mainly under LoS condition without obstruction by buildings, however some obstacles (e.g., trees, cars, lamppost) can cause obstruction. These types of partially obstructed links are sometimes referred to as Quasi-Line-Of-Sight (QLoS) [43]. The average RSS is above −100 dBm, thus V2I communication is feasible. This zone encompasses avenues AV-1 and AV-2 (LoS), the street ST-1, ST-2 around the park (QLoS), and ST-3 (QLoS).
- Zone 2 (light-green colored in Figure 2c) is under LoS, without obstruction by buildings, but with the presence of a roundabout, which causes degradation and high fluctuations in the RSS. The RSS is fluctuating between −100 dBm and −140 dBm. The conditions for V2I are degraded. This zone comprises the roundabout (LoS), AV-1, AV-2 before the roundabout and AV-3, AV-4 after the roundabout.
- Zone 3 (light-blue colored in Figure 2c) is under NLoS conditions caused by buildings. The position of buildings can generate a corridor-configuration at some street segments, where the waveguide effect [44,45] is produced. The average RSS fluctuates between −100 dBm and −120 dBm. The conditions for V2I communications are degraded. This zone encompasses street ST-1 between B5-B4 and B1-B2 and, ST-2 between B4 and B3.
- Zone 4 (blue colored in Figure 2c) is under NLoS caused by buildings. The average RSS is below −120 dBm with high fluctuations. The conditions for V2I communications are unfeasible. This zone encompasses avenues AV-3, AV-4 and the AV-5.
- Two Tx could be in opposite corners of the park, the first at the intersection of AV-2 and ST-3, and the second at the intersection of ST-1 and ST-2. This configuration ensures RSS above RST at AV-1, AV-2, ST-1, ST-2, and ST-3.
- One Tx could be located at strategic surrounding area of the roundabout to allow coverage for the roundabout, AV-3, AV-4 and part of AV-1 and AV-2.
- One Tx could be placed at intersection of AV-2 and AV-5 so that ensures the coverage for AV-5 and part of AV-1.
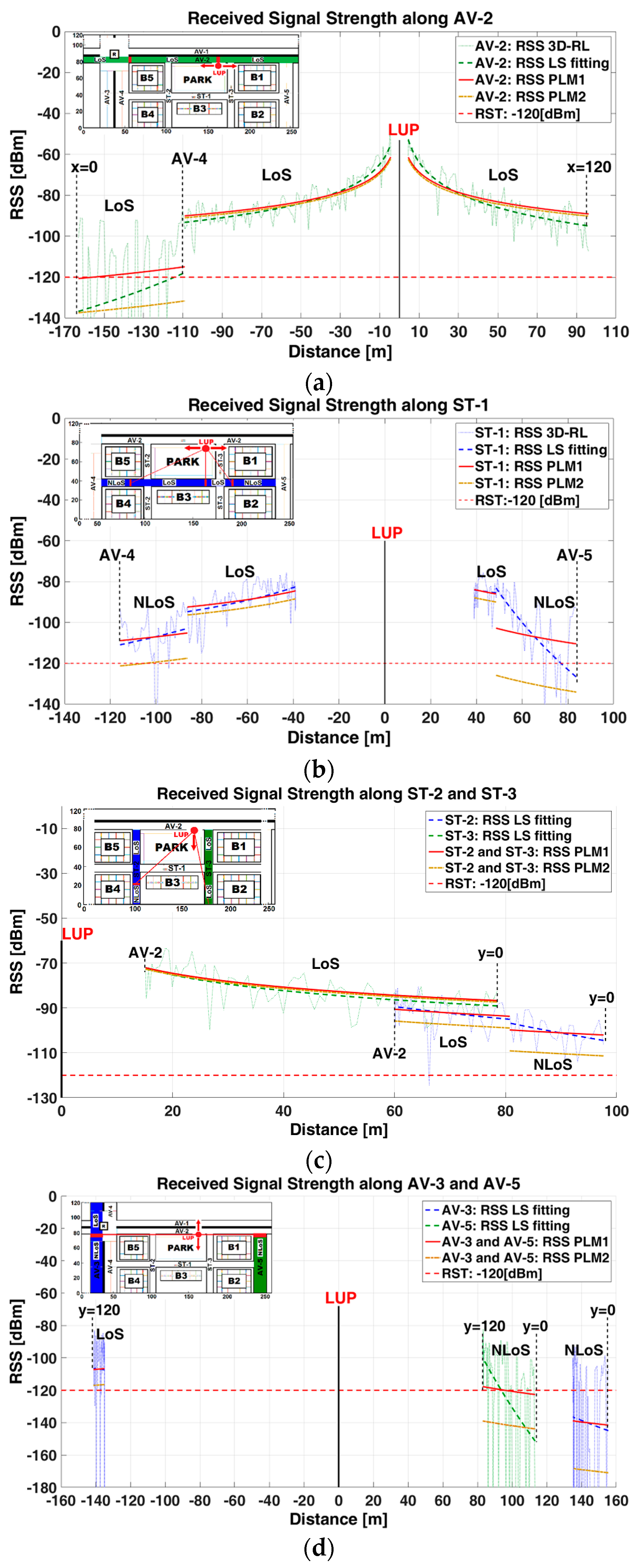
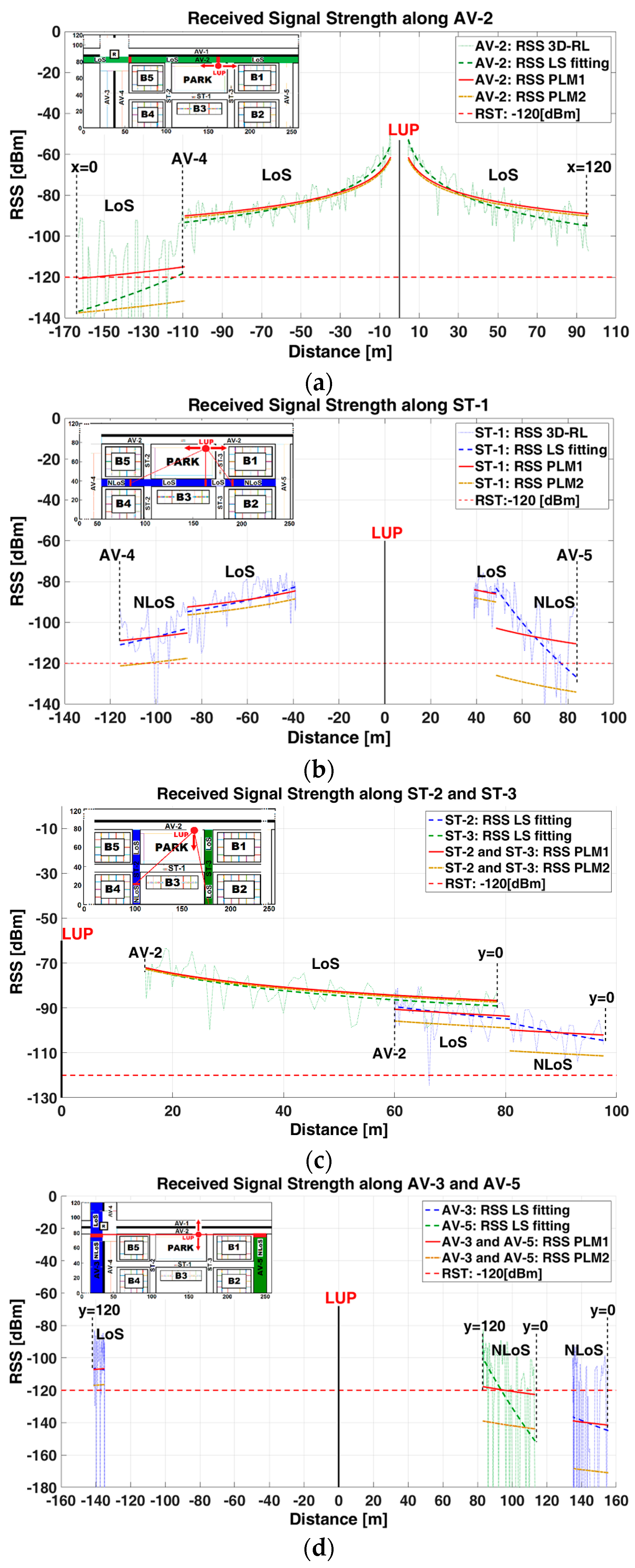
4.2. Large-Scale Spatial Path Loss Characterization
- (1)
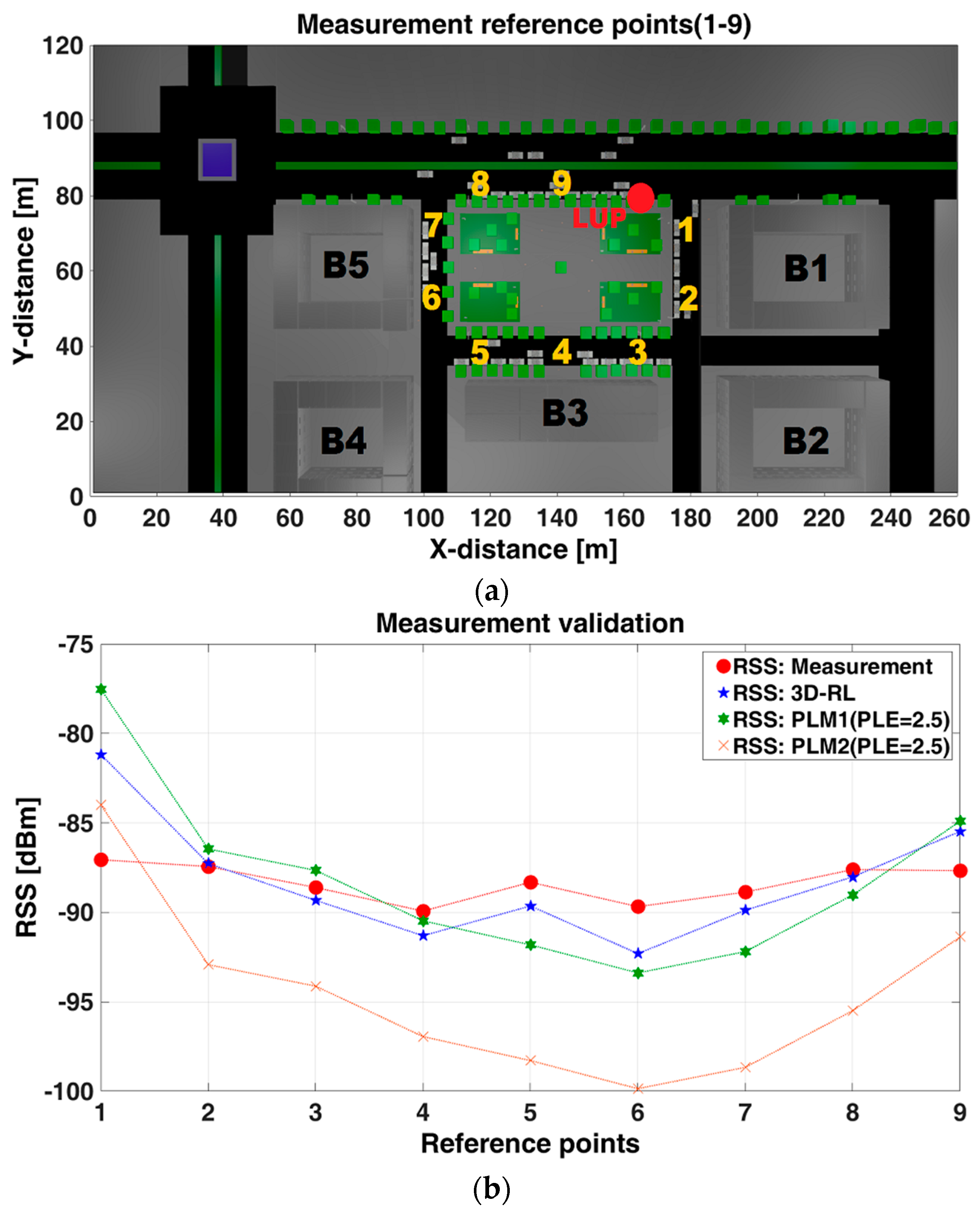
- RSS (dotted-line): 3D-RL technique, is the representation of the raw data obtained from the scenario simulation, organized in an array of 20 matrices (z-plane), each one with dimension of 260 × 120 (x-plane and y-plane).
- (2)
- RSS (dashed-line): Fitting of the RSS raw data using a first order polynomial that represents the tendency-line of the raw data. This Least Squares (LS) fitting is robust to minimize the effect of some outliers in the RSS raw data and let us visualize the RSS propagation behavior. It constitutes the comparison point to measure the goodness-of-fit with any path loss model.
- (3)
- RSS (continuous-line): Path loss model (PLM1) [46] is used for comparison purposes with the 3D-RL results. This PLM describes the random shadowing effects over a large number of measurements that have the same Tx-Rx separation, but different levels of clutter on the propagation path. The received power ; (RSS in this work) is defined by
- (4)
- RSS (dashed-point-line): Path loss model (PLM2), [12] is used for comparison purposes with the 3D-RL results. This analytical PLM2 does not consider either a free space reference distance (do), or free space path loss PL(do). The is defined as
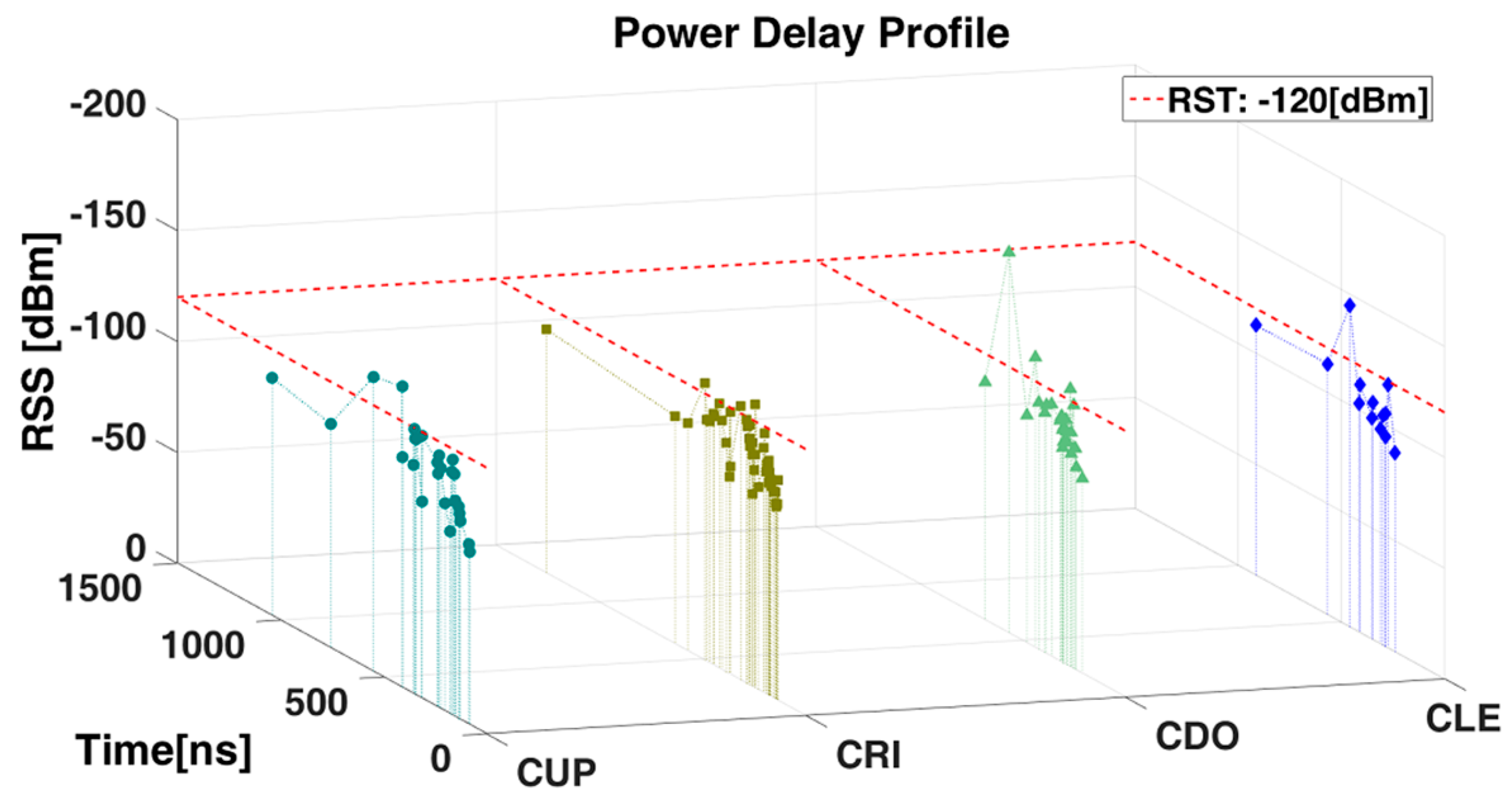
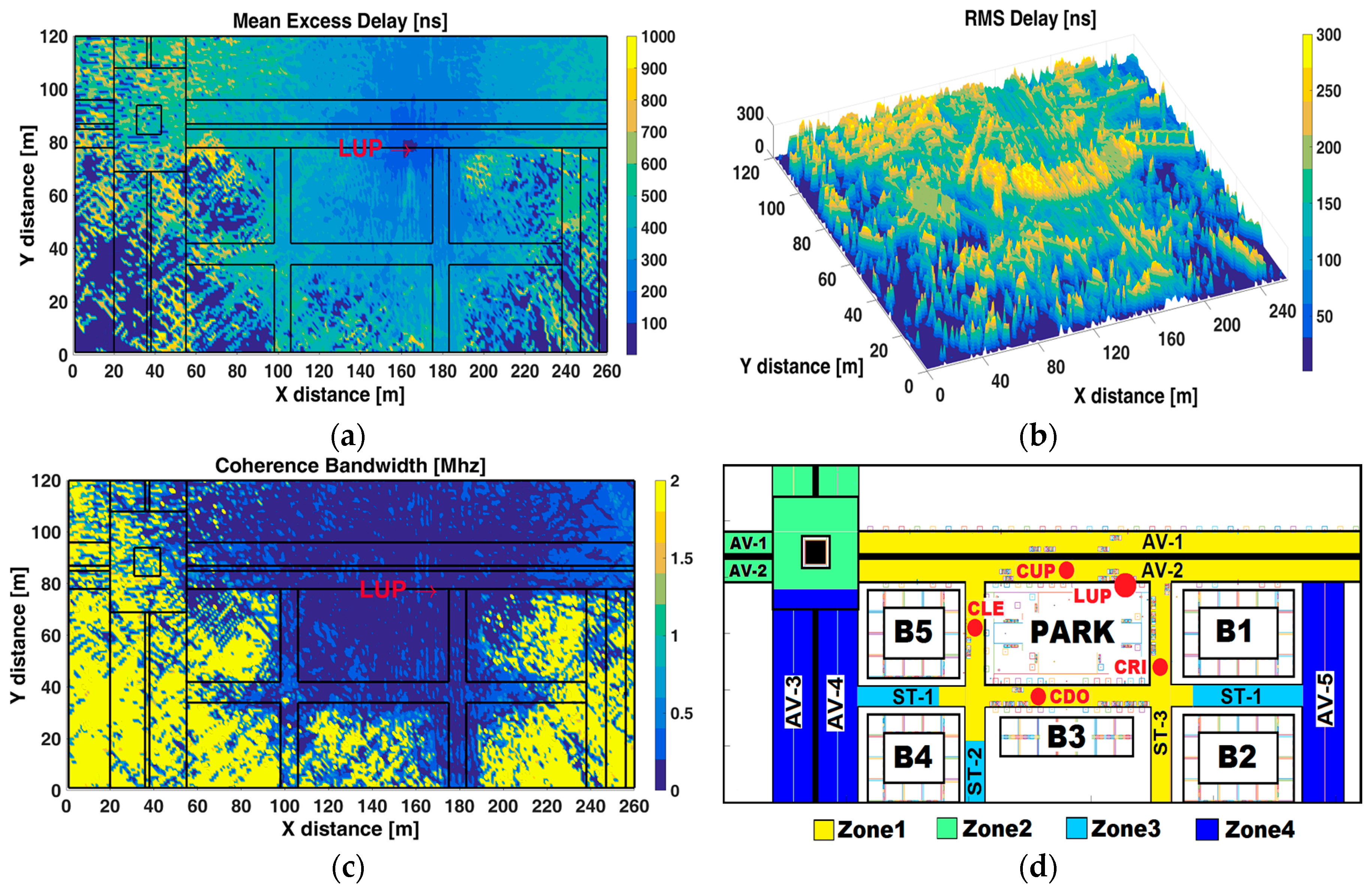
4.3. Multipath Metrics
4.3.1. Power Delay Profile (PDP)
4.3.2. Mean Excess Delay, Root Mean Square Delay Spread and Coherence Bandwidth
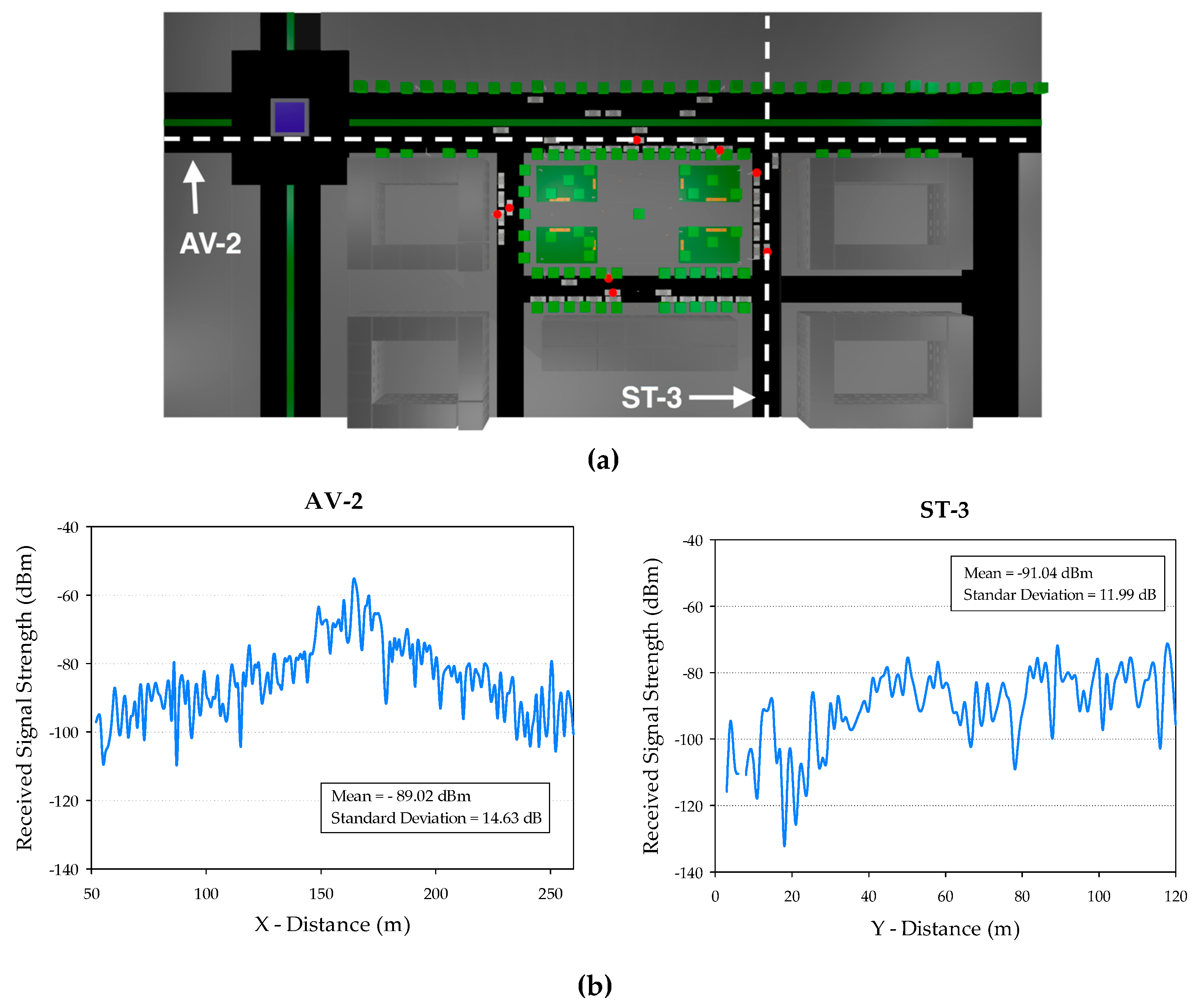
5. Measurement Validation
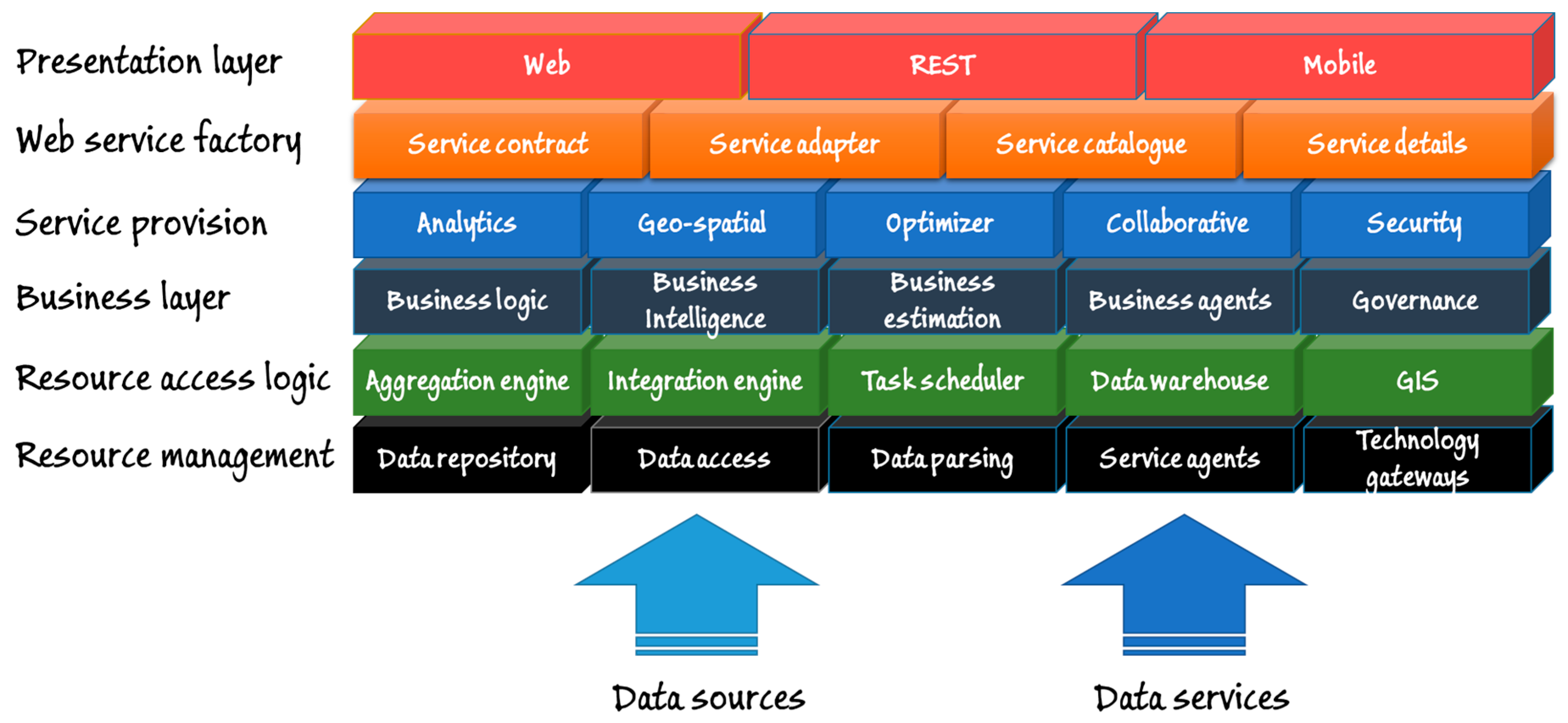
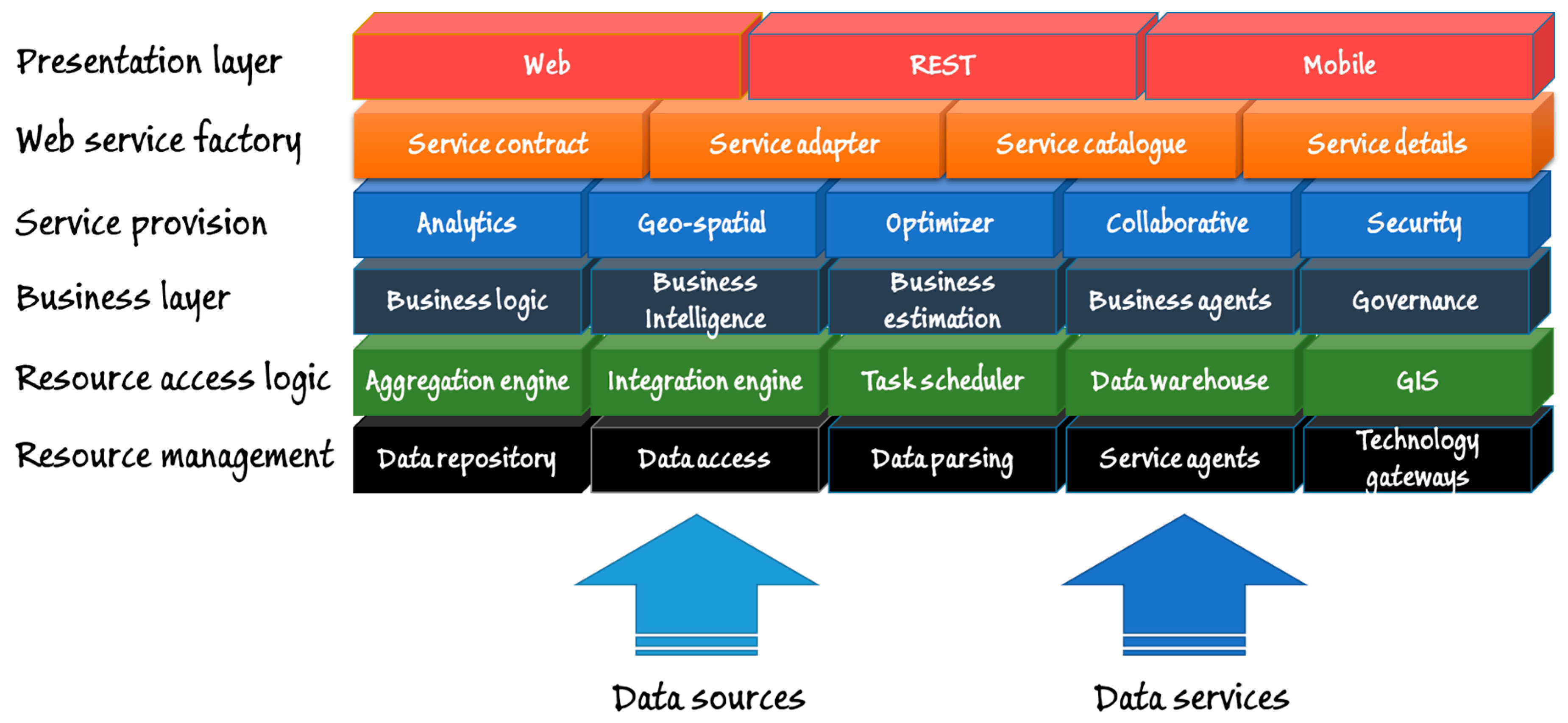
6. Application
7. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- World Health Organization Road Traffic Injuries. Available online: http://www.who.int/mediacentre/factsheets/fs358/en/ (accessed on 4 February 2017).
- Kochanek, K.D.; Xu, J.; Murphy, S.L.; Minino, A.M.; Kung, H.-C. National Vital Statistics Reports Deaths: Final Data for 2009. Natl. Cent. Heal. Stat. 2012, 60, 1–117. [Google Scholar]
- Instituto Nacional de Estadística y Geografía-INEGI Accidentes de Tránsito Terrestre en Zonas Urbanas y Suburbanas. Available online: http://www.beta.inegi.org.mx/proyectos/registros/economicas/accidentes/default.html (accessed on 10 March 2017).
- TESLA-Motors. All Tesla Cars Being Produced Now Have Full Self-Driving Hardware. Available online: https://www.tesla.com/blog/all-tesla-cars-being-produced-now-have-full-self-driving-hardware?redirect=no (accessed on 4 February 2017).
- WAYMO. Journey—We’ve Been Working on Self-Driving Technology Since 2009. Available online: https://waymo.com/journey/ (accessed on 4 February 2017).
- United States Department of Transportation (USDOT). Vehicle-to-Infrastructure (V2I) Communications for Safety. Available online: http://www.its.dot.gov/research_archives/safety/v2i_comm_safety.htm (accessed on 1 March 2017).
- Massachuset Institute of Technology—News SMART automation. Available online: http://news.mit.edu/2017/smart-automation-daniela-rus-0119 (accessed on 4 February 2017).
- University of Michigan Transportation Research Institute-ITS Publications. Available online: http://www.umtri.umich.edu/our-focus/intelligent-transportation-systems (accessed on 4 February 2017).
- IEEE 802.11p-2010. In Amendment to IEEE Std 802.11–2007: Wireless Access in Vehicular Environments (WAVE); IEEE: New York, NY, USA, 2010.
- U.S. Department of Transportation (USDOT). Vehicle-to-Infrastructure (V2I) Safety Applications. Concept of Operation Document; USDOT: Washington, DC, USA, 2013.
- Belyaev, E.; Vinel, A.; Surak, A.; Gabbouj, M.; Jonsson, M.; Egiazarian, K. Robust vehicle-to-infrastructure video transmission for road surveillance applications. IEEE Trans. Veh. Technol. 2014, 64, 1. [Google Scholar] [CrossRef]
- Sommer, C.; Dressler, F. Vehicular Networking; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar]
- Raut, S.B.; Malik, L.G. Survey on vehicle collision prediction in VANET. In Proceedings of the 2014 IEEE International Conference on Computational Intelligence and Computing Research (IEEE ICCIC), Tamilnadu, India, 18–20 December 2014; pp. 735–751. [Google Scholar]
- Lee, S.; Yoon, D.; Ghosh, A. Intelligent parking lot application using wireless sensor networks. In Proceedings of the 2008 International Symposium on Collaborative Technologies and Systems, Irvine, CA, USA, 19–23 May 2008; pp. 48–57. [Google Scholar]
- Milanes, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative adaptive cruise control in real traffic situations. IEEE Trans. Intell. Transp. Syst. 2014, 15, 296–305. [Google Scholar] [CrossRef]
- ITU-R. Recommendation ITU-R P.1238–8: Propagation Data And Prediction Methods for the Planning of Indoor Radiocommunication systems and Radio Local Area Networks in the Frequency Range 300 MHz to 100 GHz; ITU-R: Geneva, Switzerland, 2015; p. 22. [Google Scholar]
- Cardote, A.; Neves, F.; Sargento, S.; Steenkiste, P. A statistical channel model for realistic simulation in VANET. In Proceedings of the 2012 IEEE Vehicular Networking Conference (VNC), Seoul, Korea, 14–16 November 2012; pp. 48–55. [Google Scholar]
- Fazio, P.; Tropea, M.; Sottile, C.; Lupia, A. Vehicular Networking and Channel Modeling: A New Markovian Approach. In Proceedings of the 12th Annual IEEE Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2015; pp. 702–707. [Google Scholar]
- Akhtar, N.; Coleri Ergen, S.; Ozkasap, O. Vehicle Mobility and Communication Channel Models for Realistic and Efficient Highway VANET Simulation. IEEE Trans. Veh. Technol. 2015, 64, 248–262. [Google Scholar] [CrossRef]
- Nilsson, M.; Gustafson, C.; Abbas, T.; Tufvesson, F. A Measurement Based Multilink Shadowing Model for V2V Network Simulations of Highway Scenarios. IEEE Trans. Veh. Technol. 2017, in press. [Google Scholar] [CrossRef]
- Azpilicueta, L.; López-Iturri, P.; Aguirre, E.; Martínez, C.; Astrain, J.J.; Villadangos, J.; Falcone, F. Evaluation of deployment challenges of wireless sensor networks at signalized intersections. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Granda, F.; Azpilicueta, L.; Vargas-rosales, C.; López-iturri, P.; Aguirre, E.; Astrain, J.J.; Villandangos, J.; Falcone, F. Characterization of radio propagation channel in Urban Vehicle to Infrastructure environments to support WSNs. In Proceedings of the 3rd International Electronic Conference on Sensors and Applications (ECSA 2016), 15–30 November 2016; Volume 3, pp. 1–6. [Google Scholar]
- Souley, A.H.; Cherkaoui, S. Realistic Urban Scenarios Simulation for Ad Hoc Networks. In Proceedings of the Second International Conference on Innovations in Information Technology, Dubai, UAE, 26–28 September 2005; pp. 1–10. [Google Scholar]
- Rodriguez, I.; Almeida, E.; Lauridsen, M.; Wassie, D.A.; Chavarria, L.; Nguyen, H.; Sorensen, T.; Mogensen, P. Measurement-based Evaluation of the Impact of Large Vehicle Shadowing on V2X Communications. In Proceedings of the European Wireless Conference, Oulu, Finland, 18–20 May 2016; pp. 142–149. [Google Scholar]
- Shemshaki, M.; Lasser, G.; Ekiz, L.; Mecklenbrauker, C. Empirical path loss model fit from measurements from a vehicle-to-infrastructure network in Munich at 5.9 GHz. In Proceedings of the IEEE International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Hong Kong, China, 30 August–2 September 2015; pp. 181–185. [Google Scholar]
- Wang, Z.; Tameh, E.; Nix, A. Statistical peer-to-peer channel models for outdoor urban environments at 2GHz and 5GHz. In Proceedings of the IEEE Vehicular Technology Conference, VTC2004-Fall 2004, Los Angeles, CA, USA, 26–29 September 2004; Volume 10, pp. 5101–5105. [Google Scholar]
- Campolo, C.; Cozzetti, H.A.; Molinaro, A.; Scopigno, R. Vehicular connectivity in urban scenarios: Effectiveness and potential of roadside, moving WAVE providers and hybrid solutions. EURASIP J. Wirel. Commun. Netw. 2011, 1, 10. [Google Scholar] [CrossRef]
- Azpilicueta, L.; Rawat, M.; Rawat, K.; Ghannouchi, F.; Falcone, F. Convergence analysis in deterministic 3D ray launching radio channel estimation in complex environments. Appl. Comput. Electromagn. Soc. J. 2014, 29, 256–271. [Google Scholar]
- Azpilicueta, L.; Vargas-Rosales, C.; Falcone, F. Deterministic Propagation Prediction in Transportation Systems. IEEE Veh. Technol. Mag. 2016, 11, 29–37. [Google Scholar] [CrossRef]
- Keller, J.B. Geometrical theory of diffraction. J. Opt. Soc. Am. 1962, 52, 116–130. [Google Scholar] [CrossRef] [PubMed]
- Keller, J.B. One hundred years of diffraction theory. IEEE Trans. Antennas Propag. 1985, 33, 123–136. [Google Scholar] [CrossRef]
- Kouyoumjian, R.G.; Pathak, P.H. A uniform theory of diffraction for an edge in a perfectly conducting surfaces. Proc. IEEE 1974, 62, 1448–1462. [Google Scholar] [CrossRef]
- Gennarelli, G.; Riccio, G. A uapo-based model for propagation prediction in microcellular environments. Prog. Electromagn. Res. B 2009, 17, 101–116. [Google Scholar] [CrossRef]
- Son, H.W.; Myung, N.H. A deterministic ray tube method for microcellular wave propagation prediction model. IEEE Trans. Antennas Propag. 1999, 47, 1344–1350. [Google Scholar] [CrossRef]
- Tayebi, A.; Gómez, J.; de Adana, F.S.; Gutierrez, O. The application of arrival and received signal strength in multipath indoor environments. Prog. Electromagn. Res. 2009, 91, 1–15. [Google Scholar] [CrossRef]
- Cardama, A. Antenas; Editions Universitat Politécnica de Catalunya: Barcelona, Spain, 1993. [Google Scholar]
- Hristov, H.D. Fresnel Zones in Wireless Links, Zone Plate Lenses and Antennas; Artech House, Inc.: Norwood, MA, USA, 2000. [Google Scholar]
- Luebbers, R.J. A Heuristic UTD Slope Diffraction Coefficient for Rough Lossy Wedges. IEEE Trans. Antennas Propag. 1989, 37, 206–211. [Google Scholar] [CrossRef]
- Luebbers, R. Comparison of Lossy Wedge Diffraction Coefficients with Application to Mixed Path Propagation Loss Prediction. IEEE Trans. Antennas Propag. 1988, 36, 1031–1034. [Google Scholar] [CrossRef]
- Aguirre, E.; Lopez-Iturri, P.; Azpilicueta, L.; Astrain, J.J.; Villadangos, J.; Falcone, F. Analysis of wireless sensor network topology and estimation of optimal network deployment by deterministic radio channel characterization. Sensors 2015, 15, 3766–3788. [Google Scholar] [CrossRef] [PubMed]
- Aguirre, E.; Lopez, P.; Azpilicueta, L.; Arpon, J.; Falcone, F. Wireless corner: Characterization and consideration of topological impact of wireless propagation in a commercial aircraft environment. IEEE Antennas Propag. Mag. 2013, 55, 240–258. [Google Scholar]
- Iturri, P.L.; Nazabal, J.A.; Azpilicueta, L.; Rodriguez, P.; Beruete, M.; Fernandez-Valdivielso, C.; Falcone, F. Impact of high power interference sources in planning and deployment of Wireless Sensor Networks and devices in the 2.4 GHz frequency band in heterogeneous environments. Sensors 2012, 12, 15689–15708. [Google Scholar] [CrossRef] [PubMed]
- Toeltsch, M.; Member, S.; Laurila, J.; Kalliola, K. Statistical Characterization of Urban Spatial Radio. IEEE J. Sel. Areas Commun. 2002, 20, 539–549. [Google Scholar] [CrossRef]
- Blaunstein, N. Average Field Attenuation in the Nonregular Impedance Street Waveguide. IEEE Trans. Antennas Propag. 1998, 46, 1782–1789. [Google Scholar] [CrossRef]
- Porrat, D. Radio Propagation in Hallways and Streets for UHF Communications. PhD. Thesis, Stanford University, Stanford, CA, USA, 2002. [Google Scholar]
- Rappaport, T. Wireless Communications: Principles and Practice, 2nd ed.; Prentice-Hall, Ed.; Communications Engineering and Emerging Technologies Series; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Mao, G.; Anderson, B.D.O.; Fidan, B. Path loss exponent estimation for wireless sensor network localization. Comput. Netw. 2007, 51, 2467–2483. [Google Scholar] [CrossRef]
- Shivaldova, V.; Sepulcre, M.; Winkelbauer, A.; Gozalvez, J.; Mecklenbrauker, C.F. A model for vehicle-to-infrastructure communications in urban environments. In Proceedings of the 2015 IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; pp. 2387–2392. [Google Scholar]
- Fernandez, H.; Rodrigo-Penarrocha, V.M.; Rubio, L.; Reig, J. Path loss characterization in vehicular environments under LOS and NLOS conditions at 5.9 GHz. In Proceedings of the 8th European Conferencde on Antennas and Propagation (EuCAP), The Hague, The Netherlands, 6–11 April 2014; Volume 13, pp. 3044–3048. [Google Scholar]
- Hassan, K.; Rahman, T.A. The Mathematical Relationship Between Maximum Access Delay and the R.M.S Delay Spread. In Proceedings of the Seventh International Conference on Wireless and Mobile Communications, Luxembourg, 19–24 June 2011; pp. 18–23. [Google Scholar]
- Sevlian, R.; Chun, C.; Tan, I.; Bahai, A.; Laberteaux, K. Channel Characterization for 700 MHz DSRC Vehicular Communication. J. Electr. Comput. Eng. 2010, 2010, 1–9. [Google Scholar] [CrossRef]
- Córdoba, A.; Astrain, J.J.; Villadangos, J.; Azpilicueta, L.; López-iturri, P.; Aguirre, E.; Falcone, F.; Member, S. SesToCross : Semantic Expert System to Manage Single-Lane Road Crossing. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1–13. [Google Scholar] [CrossRef]
- Batman-adv. (Better Approach to Mobile Ad-Hoc Networking Advanced). Available online: https://www.open-mesh.org/projects/batman-adv (accessed on 20 March 2017).
- Calidad Del Aire. Available online: https://www.navarra.es/appsext/CalidadDelAire/Templates/PT_Estacion.aspx?NRMODE=Published&NRNODEGUID=%7BB044F133-34F2-4475-945C-EBCF0C61911E%7D&NRORIGINALURL=%2Fhome_es%2FTemas%2FMedio%2BAmbiente%2FCalidad%2Bdel%2Baire%2FEstaciones%2FRed%2FRotxapea.htm&NRCACHEHINT=Guest (accessed on 20 March 2017).
- MySQL. Available online: https://www.mysql.com/ (accessed on 1 March 2017).
- Google Maps APIs. Available online: https://developers.google.com/maps/ (accessed on 1 March 2017).
- GNU Operating System. Available online: https://www.gnu.org/ (accessed on 1 March 2017).
- PROXMOX. Available online: https://www.proxmox.com/en/ (accessed on 1 Mar 2017).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Abbreviation | Position (x, y, z) [m] |
|---|---|---|
| Main Avenues | AV-1/AV-2/AV-3/AV-4/AV-5 | (x, 93, 0)/(x, 82, 0)/(29, y ,0)/(47, y, 0)/(247, y, 0) |
| Streets | ST-1/ST-2/ST-3 | (x, 39, 0)/(54, y, 0)/(130, y, 0) |
| Transmitter antenna | Tx (LUP) | (164, 78, 3.5) |
| Car antennas | CUP/CRI/CDO/CLE | (91, 82, 1.5)/(130, 50, 1.5)/(84, 38, 1.5)/(54, 62, 1.5) |
| Buildings/Park | B1, B2, B3, B4, B5/Park | Not applicable. |
| Parameters | Values |
|---|---|
| Transmitter (Tx): Tx. Power/Gain/Frequency/Height | −10 dBm/5 dB/5.9 Ghz/3.5 m |
| Receiver (Rx): Rx. RST/Gain/Frequency/Height | −120 dBm/5 dB/5.9 Ghz/1.5 m |
| Antenna Polarization | Omnidirectional |
| 3D Ray tracing resolution | 1 degree |
| Scenario size/Unitary volume analysis | 260 m × 120 m × 20 m/Cuboids of 1 m |
| Description | PLE (n) | STD (σ) [dB] | LS vs. PLM1 GOF (R2) |
|---|---|---|---|
| AV-2 (along x-axis) | |||
| Roundabout (LoS)/left-Tx * (LoS)/Tx-right (LoS) | 3.76/2.13/2.22 | 39.12/5.59/6.59 | 0/0.94/0.91 |
| ST-1 (along x-axis) | |||
| Between B4-B5 (NLoS)/Left-Tx (LoS)/ | 2.96/2.30/ | 18.37/7.22/ | 0.72/0.87/ |
| Tx-Right(LoS)/Between B1-B2 (NLoS) | 2.26/3.25 | 7.21/22.43 | 0.72/0.31 |
| ST-2 (along y-axis) | |||
| Park(LoS)/Between B3-B4 (NLoS) | 2.40/2.72 | 7.35/6.28 | 0.77/0.48 |
| ST-3 (along y-axis) (LoS) | 2.07 | 5.432 | 0.90 |
| AV-3 (along y-axis) | |||
| Roundabout(LoS)/Behind B4-B5 (NLoS) | 2.76/4.27 | 31.63/42.76 | 0/0.49 |
| AV-5 (along y-axis) (NLoS) | 3.64 | 38.01 | 0.18 |
| Avenue/Street | Mean (dBm) | Standard Deviation (dB) |
|---|---|---|
| AV-1 | −88.70 | 10.881 |
| AV-2 | −89.07 | 14.63 |
| AV-3 | −106.25 | 13.03 |
| AV-4 | −104.26 | 11.73 |
| AV-5 | −97.37 | 11.71 |
| ST-1 | −97.16 | 11.58 |
| ST-2 | −106.16 | 13.67 |
| ST-3 | −91.04 | 11.99 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Granda, F.; Azpilicueta, L.; Vargas-Rosales, C.; Lopez-Iturri, P.; Aguirre, E.; Astrain, J.J.; Villandangos, J.; Falcone, F. Spatial Characterization of Radio Propagation Channel in Urban Vehicle-to-Infrastructure Environments to Support WSNs Deployment. Sensors 2017, 17, 1313. https://doi.org/10.3390/s17061313
Granda F, Azpilicueta L, Vargas-Rosales C, Lopez-Iturri P, Aguirre E, Astrain JJ, Villandangos J, Falcone F. Spatial Characterization of Radio Propagation Channel in Urban Vehicle-to-Infrastructure Environments to Support WSNs Deployment. Sensors. 2017; 17(6):1313. https://doi.org/10.3390/s17061313
Chicago/Turabian StyleGranda, Fausto, Leyre Azpilicueta, Cesar Vargas-Rosales, Peio Lopez-Iturri, Erik Aguirre, Jose Javier Astrain, Jesus Villandangos, and Francisco Falcone. 2017. "Spatial Characterization of Radio Propagation Channel in Urban Vehicle-to-Infrastructure Environments to Support WSNs Deployment" Sensors 17, no. 6: 1313. https://doi.org/10.3390/s17061313
APA StyleGranda, F., Azpilicueta, L., Vargas-Rosales, C., Lopez-Iturri, P., Aguirre, E., Astrain, J. J., Villandangos, J., & Falcone, F. (2017). Spatial Characterization of Radio Propagation Channel in Urban Vehicle-to-Infrastructure Environments to Support WSNs Deployment. Sensors, 17(6), 1313. https://doi.org/10.3390/s17061313