Adaptive Estimation of Multiple Fading Factors for GPS/INS Integrated Navigation Systems


Abstract
:1. Introduction
2. Fading Filter and H-Infinity Filter
2.1. Basic Rules of the Fading Filter
2.2. The Recent Fading Factors
2.3. Principles of the H-Infinity Filter
3. Adaptive Estimation of the Multiple Fading Factor
4. The GPS/INS Integrated Navigation System
5. Testing
5.1. Experiment Schemes
- Scheme 1: the cubature Kalman Filter (CKF);
- Scheme 2: the H-infinity Filter (HF-CKF) ( was set as 2);
- Scheme 3: the conventional multiple fading filter (MF-CKF);
- Scheme 4: the new multiple fading filter (NMF-CKF);
- Scheme 5: the multiple fading H-infinity filter (MHF-CKF) ( was set as 2);
- Scheme 6: the new multiple fading H-infinity filter (NMHF-CKF) ( was set as 2).
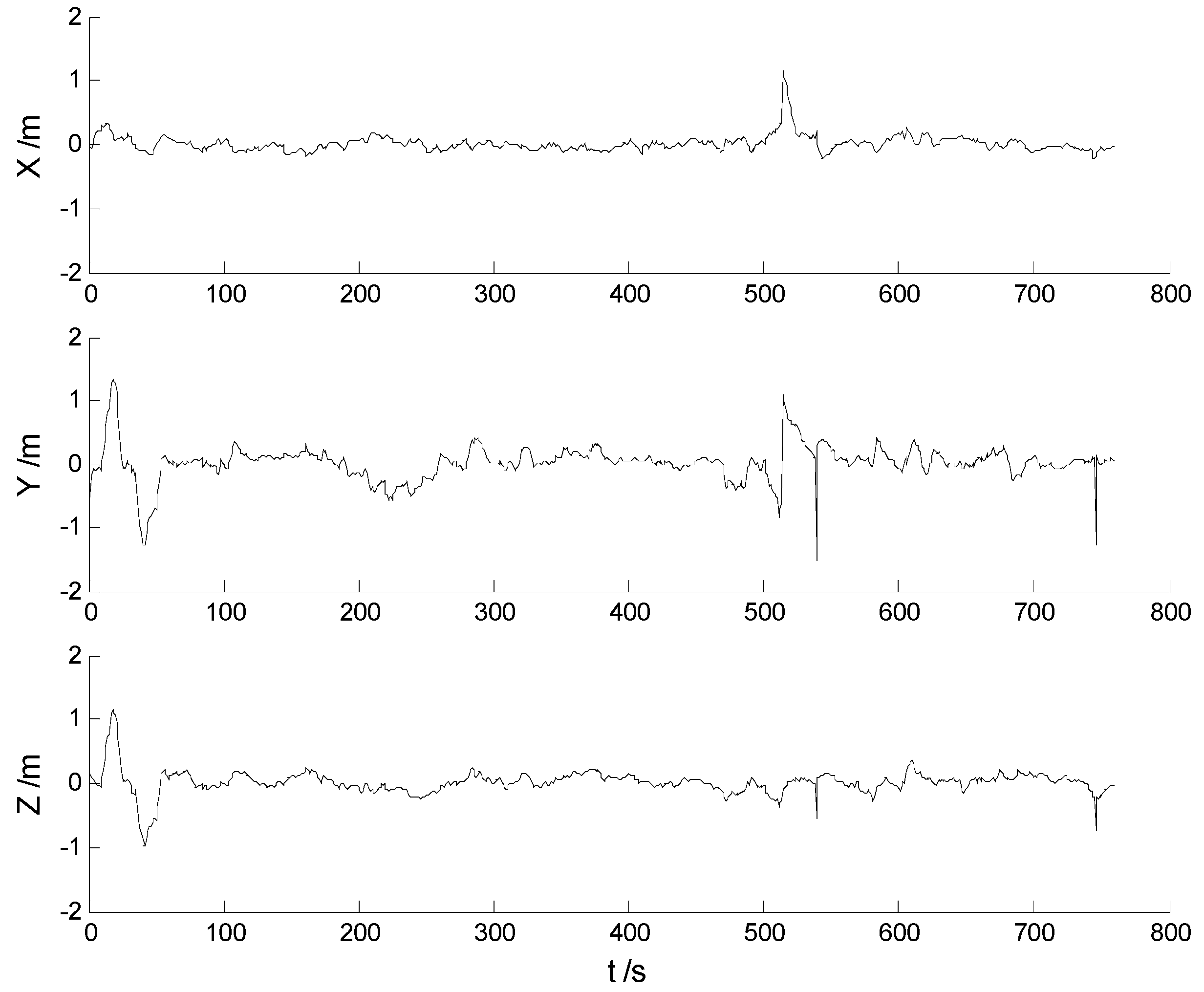
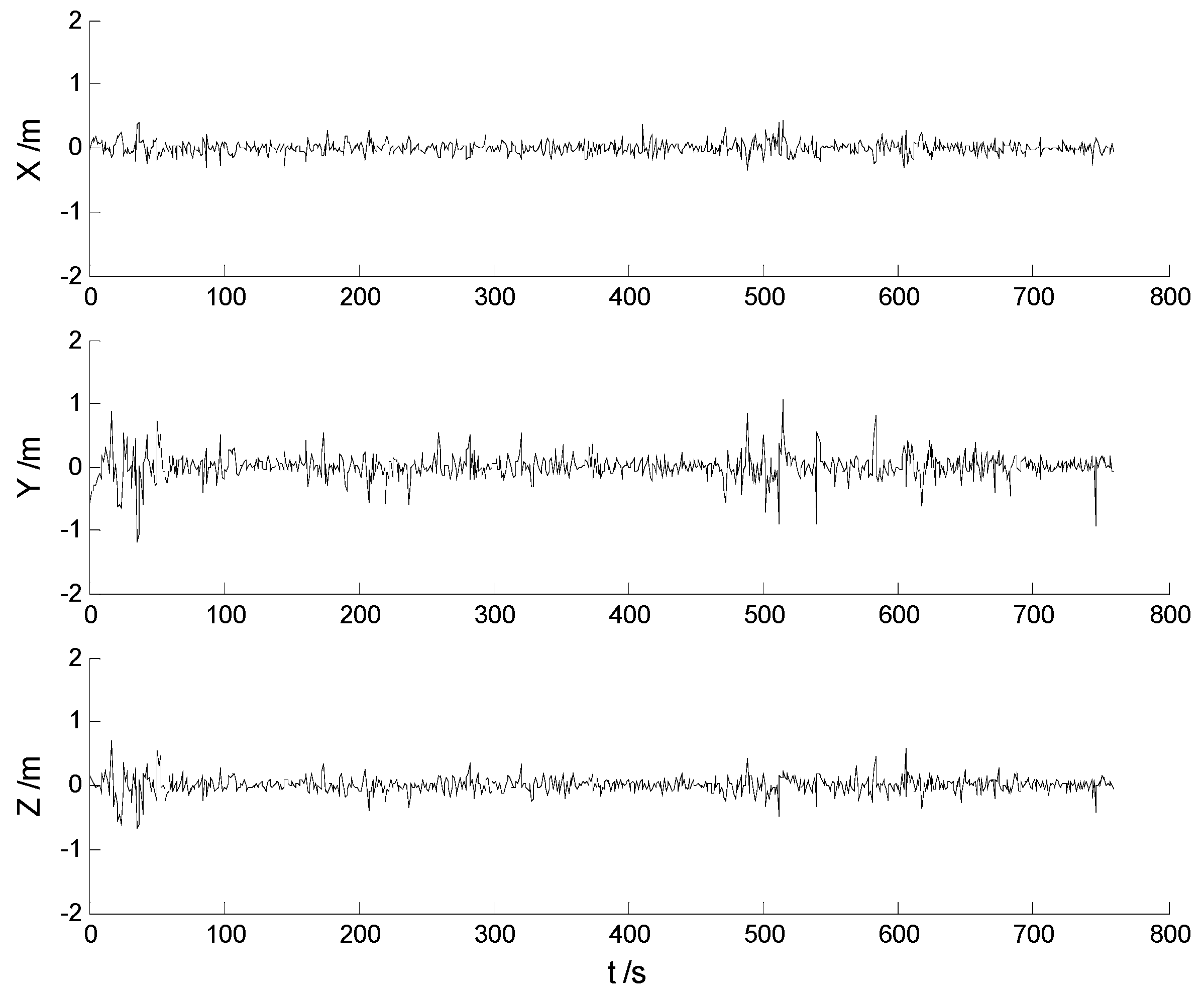
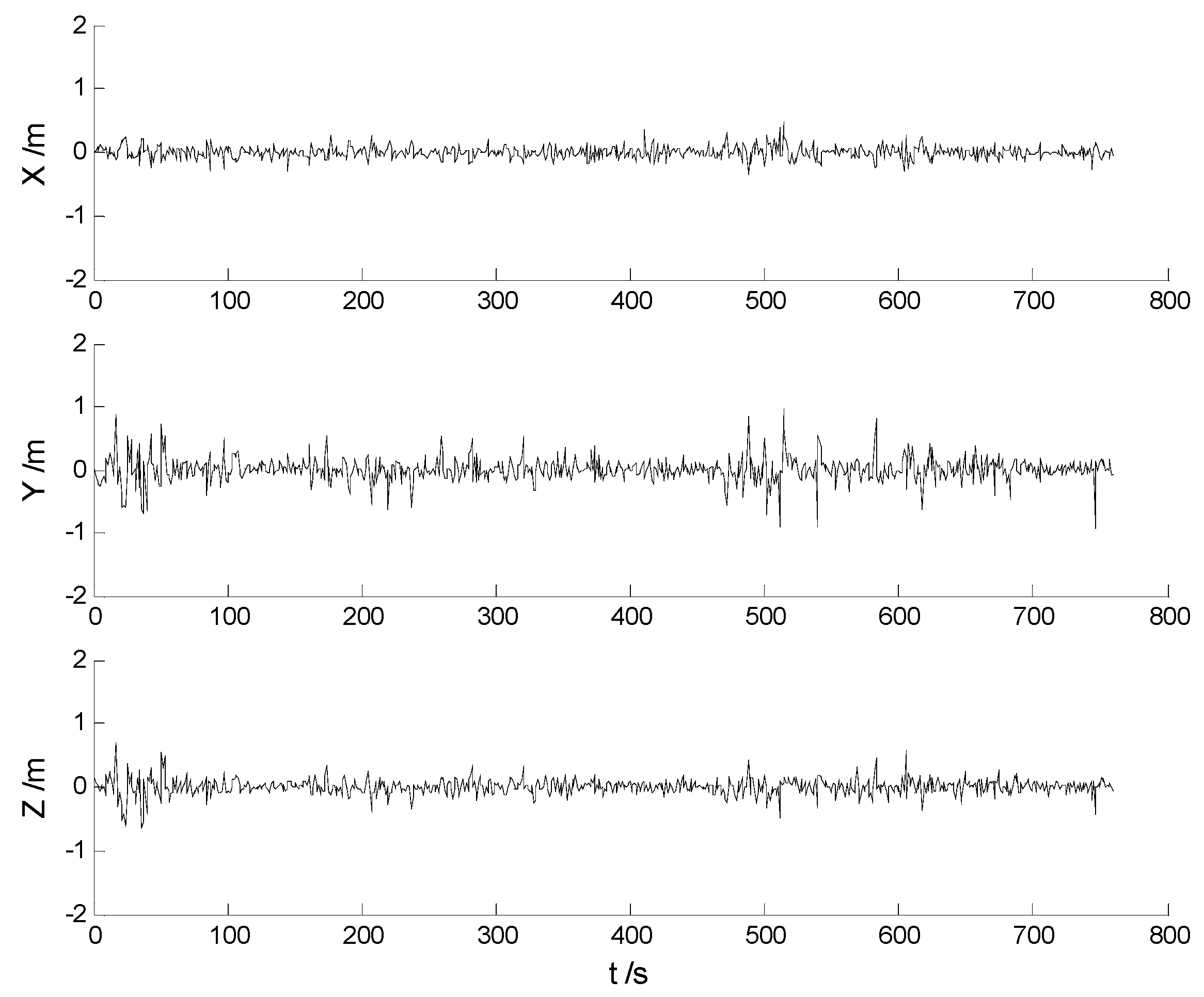
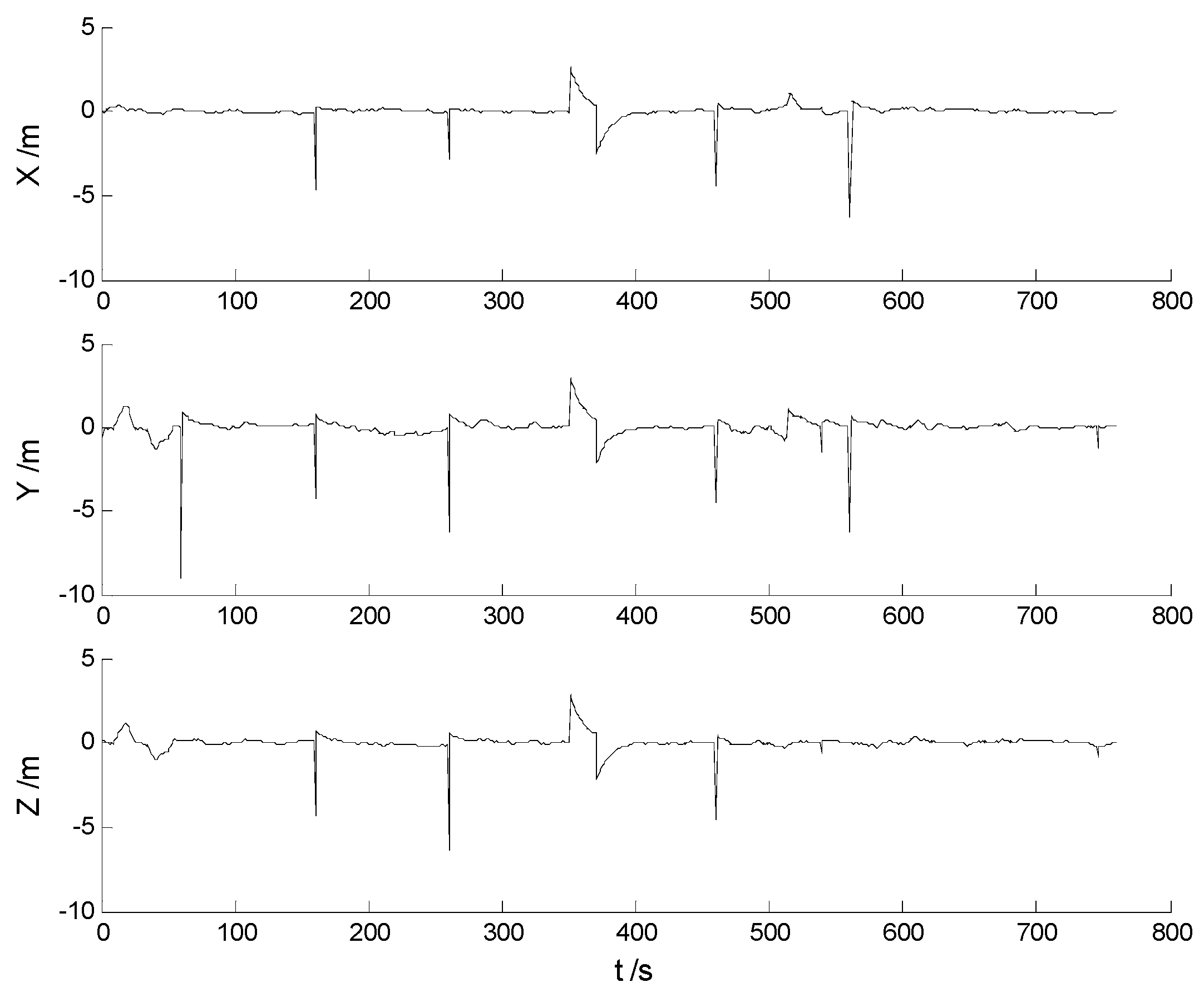
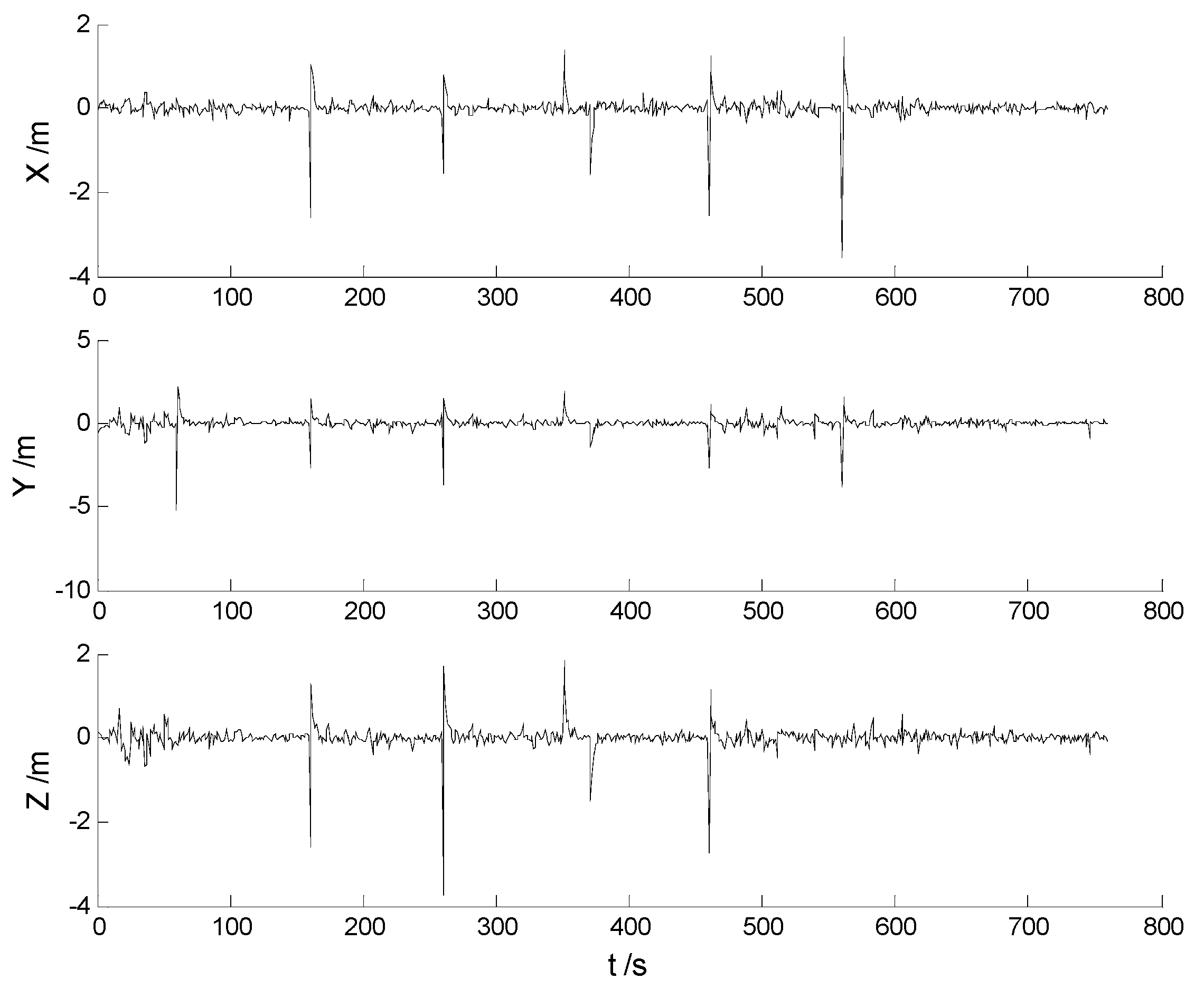
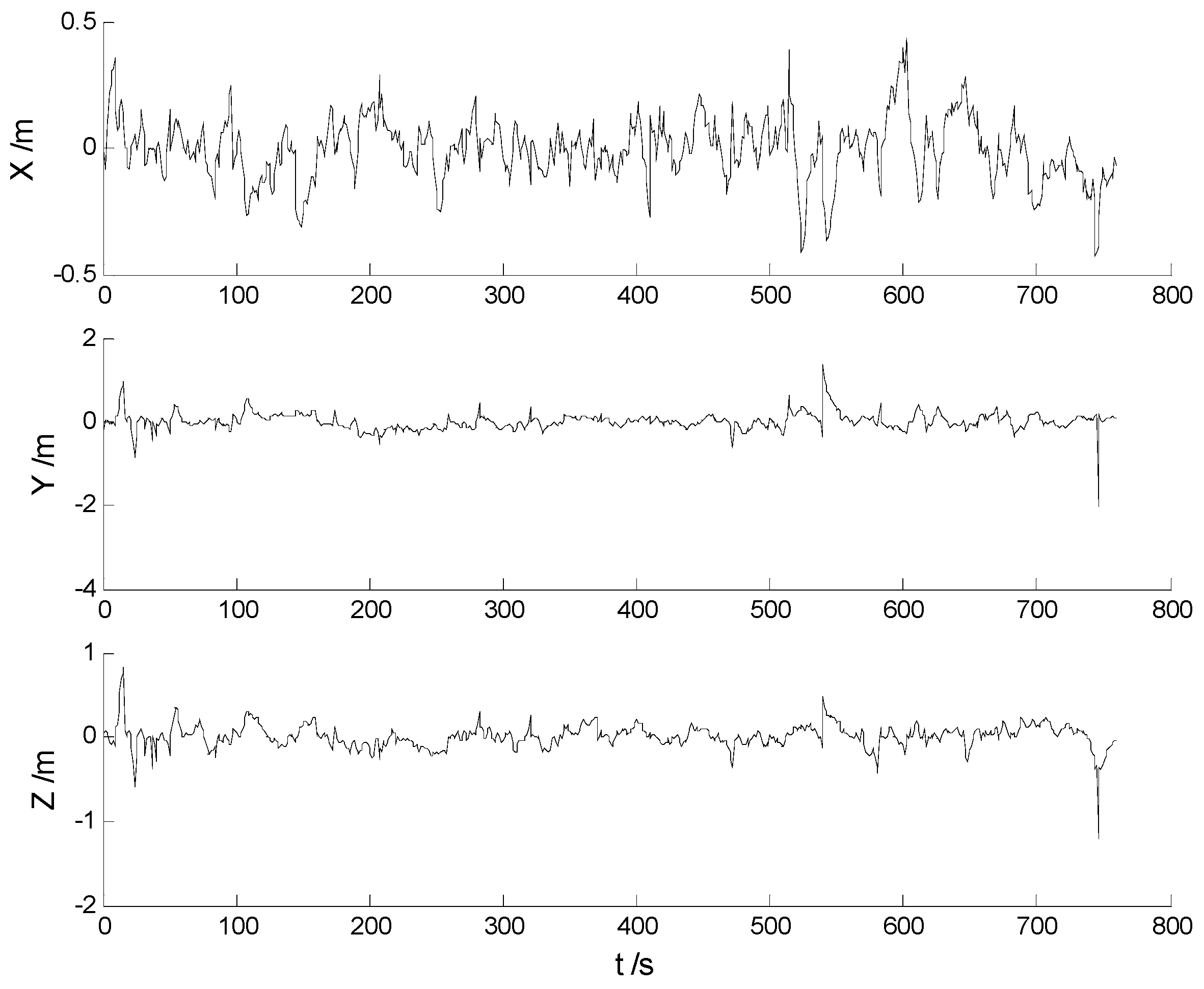
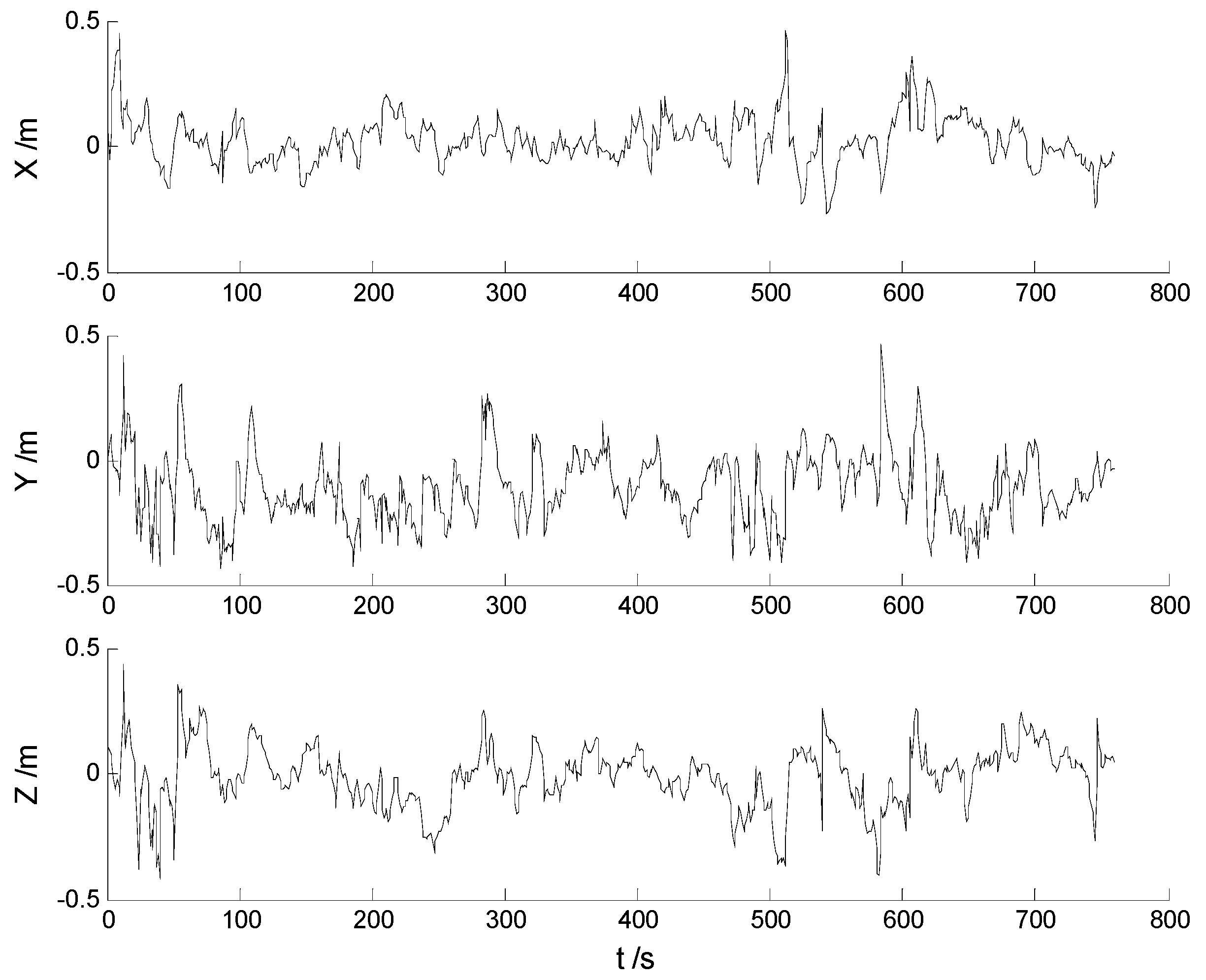
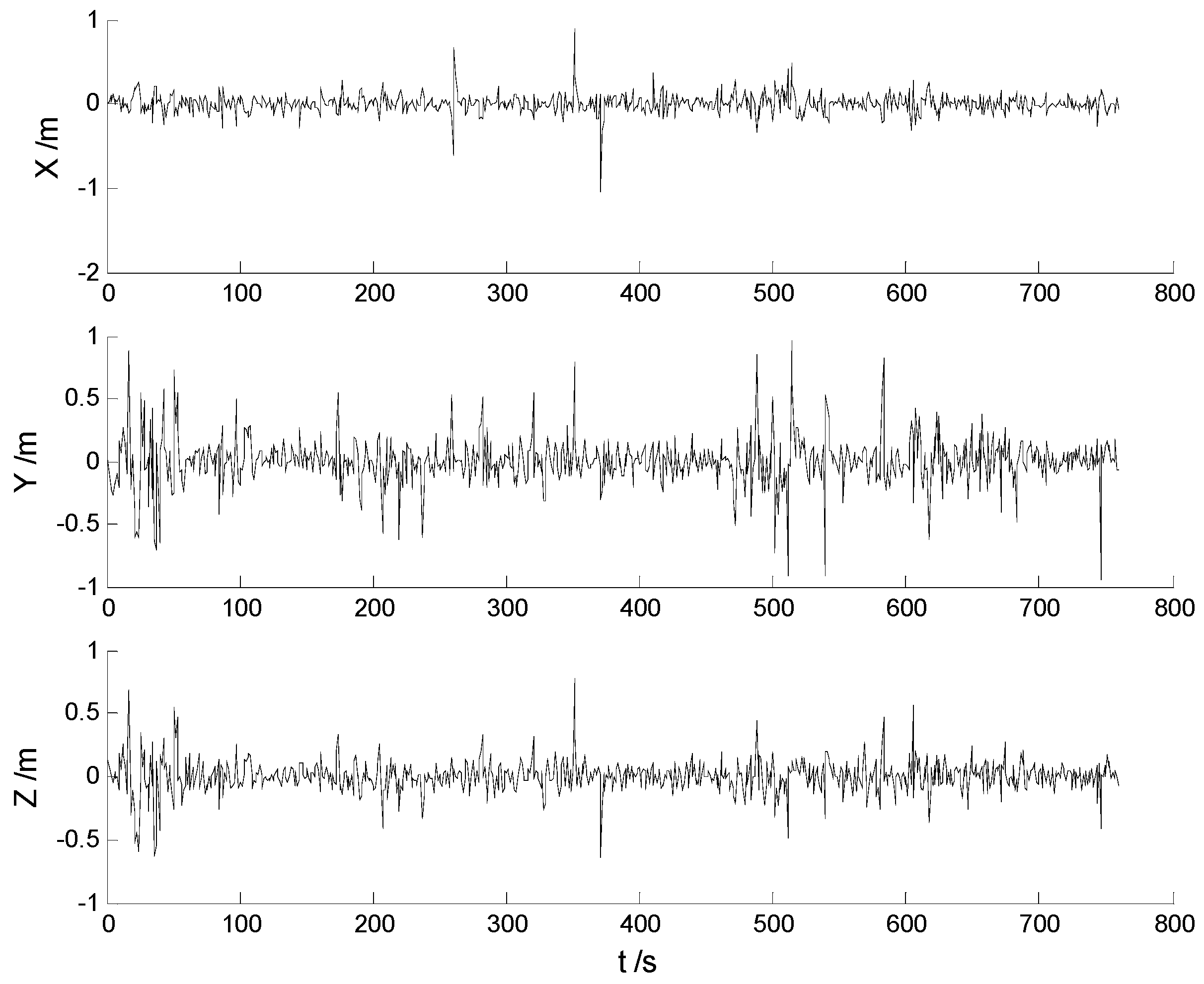
5.2. Results of the Experiments
6. Conclusions
- (1)
- The H-infinity filter based on the cubature Kalman filter performs better than the cubature Kalman filter, however, they are both affected significantly by the model errors and outliers. The conventional multiple fading filter shows certain robustness which can be furtherly enhanced.
- (2)
- With the influences of the model deviations and the uncertain interferences controlled simultaneously, performance of the conventional multiple fading filter is further improved, and the higher precision is obtained by integrating the advantages of the multiple fading filter and the H-infinity filter. The proposed multiple fading filter is implemented in the loosely-coupled GPS/INS integrated navigation system, and the stability and robustness are demonstrated with the original data and the data with both the scattered and the continuously-changing outliers.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Godha, S.; Cannon, M.E. GPS/MEMS INS integrated system for navigation in urban areas. GPS Solut. 2007, 11, 193–203. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Godha, S.; Lachapelle, G.; Cannon, M.E. Integrated GPS/INS system for pedestrian navigation in a signal degraded environment. In Proceedings of the 19th International Technical Meetings of the Satellite Division of the Institute of Navigation, Fort Worth, TX, USA, 26–29 September 2006. [Google Scholar]
- Gao, S.; Zhong, Y.; Zhang, X.; Shirinzadeh, B. Multi-sensor optimal data fusion for INS/GPS/SAR integrated navigation system. Aerosp. Sci. Technol. 2009, 13, 232–237. [Google Scholar] [CrossRef]
- Caron, F.; Duflos, E.; Pomorski, D.; Vanheeghe, P. GPS/IMU data fusion using multisensor Kalman filtering: introduction of contextual aspects. Inf. Fusion 2006, 7, 221–230. [Google Scholar] [CrossRef]
- Hide, C.; Moore, T.; Smith, M. Adaptive Kalman Filtering for Low-cost INS/GPS. J. Navig. 2003, 56, 143–152. [Google Scholar] [CrossRef]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Quality control in integrated navigation systems. In Proceedings of the 1990’—A Decade of Excellence in the Navigation Sciences, IEEE PLANS’90 Position Location and Navigation Symposium, Las Vegas, NV, USA, 20–20 March 1990; pp. 158–165. [Google Scholar]
- Yang, Y.X.; He, H.B.; Xu, G.C. Adaptively robust filtering for kinematic geodetic positioning. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Zhao, L.; Qiu, H.Y.; Feng, Y.M. Analysis of a robust Kalman filter in loosely coupled GPS/INS navigation system. Measurement 2016, 80, 138–147. [Google Scholar] [CrossRef]
- Wu, F.M.; Yang, Y.X. A new two-step adaptive robust Kalman filtering in GPS/INS integrated navigation system. Acta Geod. Cartogr. Sin. 2010, 39, 522–527. [Google Scholar]
- Yang, Y.X. Adaptive Navigation and Dynamic Positioning; Surveying and Mapping Press: Beijing, China, 2006. [Google Scholar]
- Fagin, S.L. Recursive linear regression theory: Optimal filter theory and error analysis. IEEE Int. Conv. Rec. 1964, 12, 216–245. [Google Scholar]
- Xia, Q.J.; Sun, Y.X.; Zhou, C.H. An optimal adaptive algorithm for fading Kalman filter and its application. Acta Autom. Sin. 1990, 16, 210–216. [Google Scholar]
- Qian, H.M.; Lei, G.E.; Yu, P. Multiple fading factors Kalman filter and its application in SINS initial alignment. J. Chin. Inert. Technol. 2012, 20, 287–291. [Google Scholar]
- Lee, T.S. Theory and application of adaptive fading memory Kalman filters. IEEE Trans. Circuits Syst. 1988, 35, 474–477. [Google Scholar] [CrossRef]
- Yang, Y.X.; He, H.B.; Xu, T.H. Adaptive robust filtering for GPS positioning. Acta Geod. Cartogr. Sin. 2001, 30, 293–298. [Google Scholar]
- Chang, G.B. Kalman filter with both adaptivity and robustness. J. Process Control 2014, 24, 81–87. [Google Scholar] [CrossRef]
- Geng, Y.R.; Wang, J.L. Adaptive estimation of multiple fading factors in Kalman filter for navigation applications. GPS Solut. 2008, 12, 273–279. [Google Scholar] [CrossRef]
- Hu, C.W.; Chen, W.; Chen, Y.Q.; Liu, D.J. Adaptive Kalman filtering for vehicle navigation. J. Glob. Position. Syst. 2003, 2, 42–47. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H∞ and Nonlinear Approaches; John Wiley and Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Duan, Z.S.; Zhang, J.X.; Zhang, C.S.; Mosca, E. Robust and filtering for uncertain linear systems. Automatica 2006, 42, 1919–1926. [Google Scholar] [CrossRef]
- Hassibi, C.; Sayed, A.H.; Kailath, T. Linear estimation in Krein spaces-part II: applications. IEEE Trans. Autom. Control 1996, 41, 34–49. [Google Scholar] [CrossRef]
- Yue, X.K.; Yuan, J.P. H-infinity filtering algorithm and its application in GPS/SINS integrated navigation system. Acta Aeron Autica Astronaut. Sin. 2001, 22, 366–368. [Google Scholar]
- Gao, W.G.; Yang, Y.X.; Zhang, S.C. Adaptive robust Kalman filtering based on the current statistical model. Acta Geod. Cartogr. Sin. 2006, 35, 15–18. [Google Scholar]
- Wang, X.M.; Ni, W.B. An improved particle filter and its application to an INS/GPS integrated navigation system in a serious noisy scenario. Meas. Sci. Technol. 2016, 27, 095005. [Google Scholar] [CrossRef]
- Zhang, Q.Z.; Meng, X.L.; Zhang, S.B.; Wang, Y.J. Singular value decomposition-based robust cubature Kalman filtering for an integrated GPS/SINS navigation system. J. Navig. 2015, 68, 549–562. [Google Scholar] [CrossRef]
- Zhao, Y.W. Performance evaluation of cubature Kalman filter in a GPS/IMU tightly-coupled navigation system. Signal Proc. 2016, 119, 67–79. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Random Bias | Random Constant Noise | RMSEs |
|---|---|---|---|
| Gyroscope | 20 (°)/h | 0.067 (°)/h1/2 | - |
| Accelerometer | 5 mg | 50 μg/h1/2 | - |
| GPS receiver | - | - | Position: 0.5 m; Velocity: 0.05 m/s |
| Axis | CKF | HF-CKF | MF-CKF | NMF-CKF | MHF-CKF | NMHF-CKF |
|---|---|---|---|---|---|---|
| 0.129 | 0.096 | 0.108 | 0.093 | 0.095 | 0.088 | |
| 0.284 | 0.204 | 0.207 | 0.181 | 0.195 | 0.167 | |
| 0.188 | 0.128 | 0.127 | 0.121 | 0.126 | 0.112 |
| Axis | CKF | HF-CKF | MF-CKF | NMF-CKF | MHF-CKF | NMHF-CKF |
|---|---|---|---|---|---|---|
| 0.043 | 0.042 | 0.042 | 0.038 | 0.040 | 0.036 | |
| 0.051 | 0.049 | 0.052 | 0.042 | 0.048 | 0.040 | |
| 0.324 | 0.278 | 0.275 | 0.233 | 0.243 | 0.215 |
| Axis | CKF | HF-CKF | MF-CKF | NMF-CKF | MHF-CKF | NMHF-CKF |
|---|---|---|---|---|---|---|
| 0.482 | 0.257 | 0.124 | 0.109 | 0.114 | 0.092 | |
| 0.672 | 0.409 | 0.224 | 0.191 | 0.198 | 0.178 | |
| 0.488 | 0.273 | 0.140 | 0.127 | 0.130 | 0.121 |
| Axis | CKF | HF-CKF | MF-CKF | NMF-CKF | MHF-CKF | NMHF-CKF |
|---|---|---|---|---|---|---|
| 0.046 | 0.044 | 0.043 | 0.041 | 0.042 | 0.038 | |
| 0.052 | 0.050 | 0.056 | 0.048 | 0.050 | 0.046 | |
| 0.326 | 0.312 | 0.301 | 0.254 | 0.265 | 0.239 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Zhang, S.-B.; Zhang, Q.-Z. Adaptive Estimation of Multiple Fading Factors for GPS/INS Integrated Navigation Systems. Sensors 2017, 17, 1254. https://doi.org/10.3390/s17061254
Jiang C, Zhang S-B, Zhang Q-Z. Adaptive Estimation of Multiple Fading Factors for GPS/INS Integrated Navigation Systems. Sensors. 2017; 17(6):1254. https://doi.org/10.3390/s17061254
Chicago/Turabian StyleJiang, Chen, Shu-Bi Zhang, and Qiu-Zhao Zhang. 2017. "Adaptive Estimation of Multiple Fading Factors for GPS/INS Integrated Navigation Systems" Sensors 17, no. 6: 1254. https://doi.org/10.3390/s17061254
APA StyleJiang, C., Zhang, S.-B., & Zhang, Q.-Z. (2017). Adaptive Estimation of Multiple Fading Factors for GPS/INS Integrated Navigation Systems. Sensors, 17(6), 1254. https://doi.org/10.3390/s17061254