
Automatic Detection of Driver Fatigue Using Driving Operation Information for Transportation Safety

Abstract
:1. Introduction
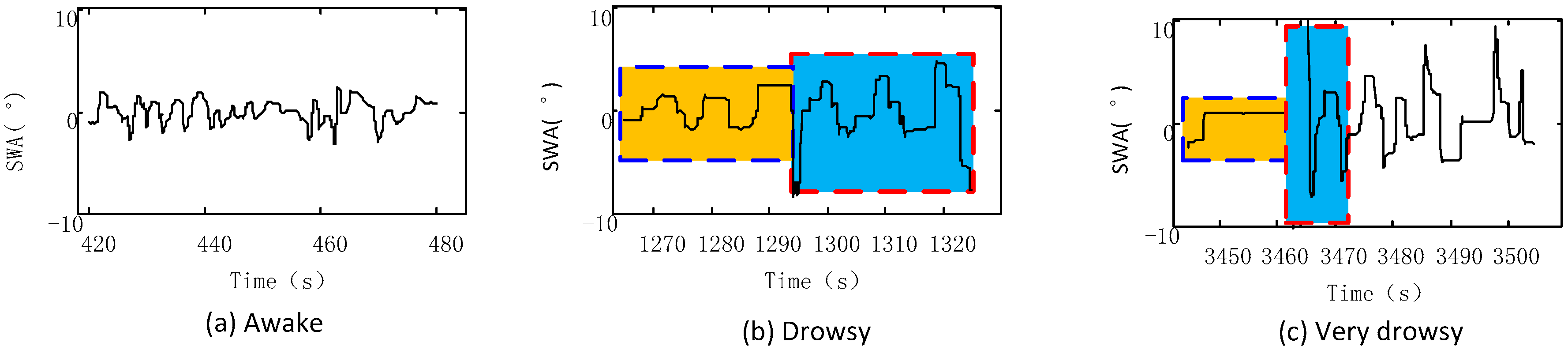
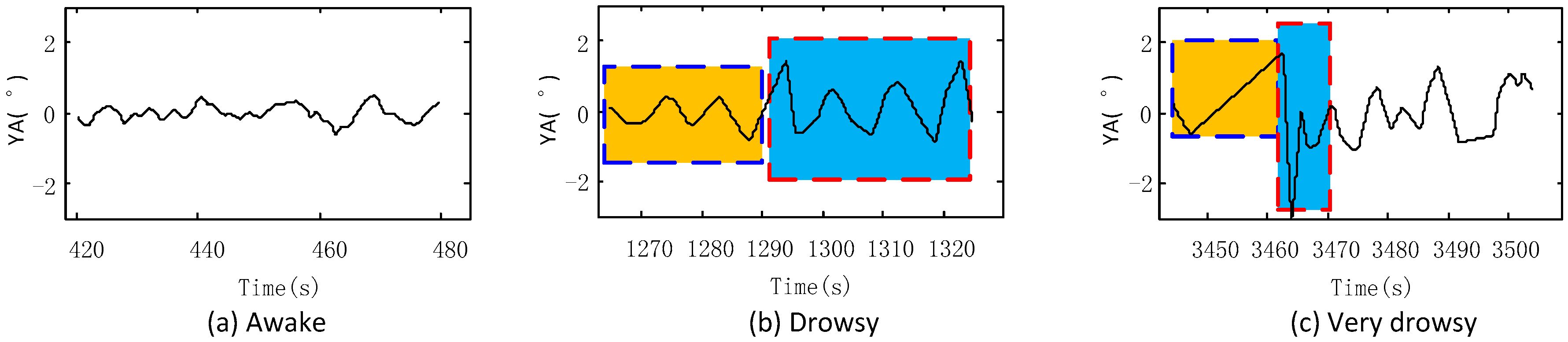
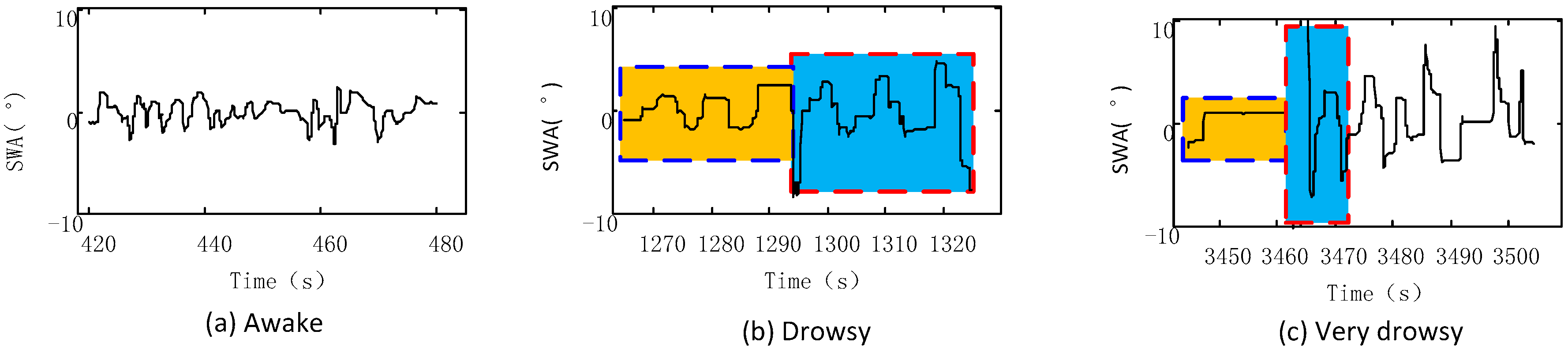
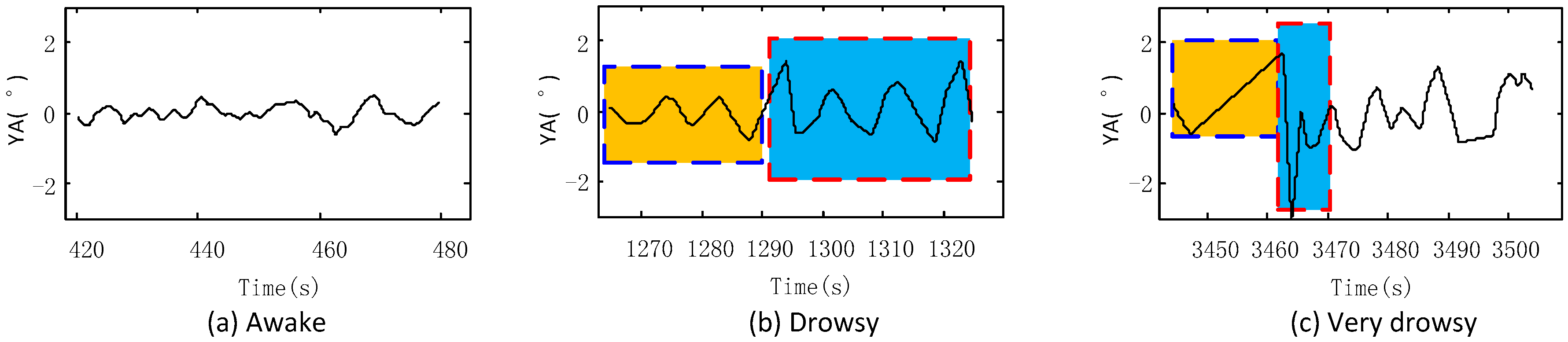
2. Analysis of Drivers’ Operation Characteristics
3. Methodology
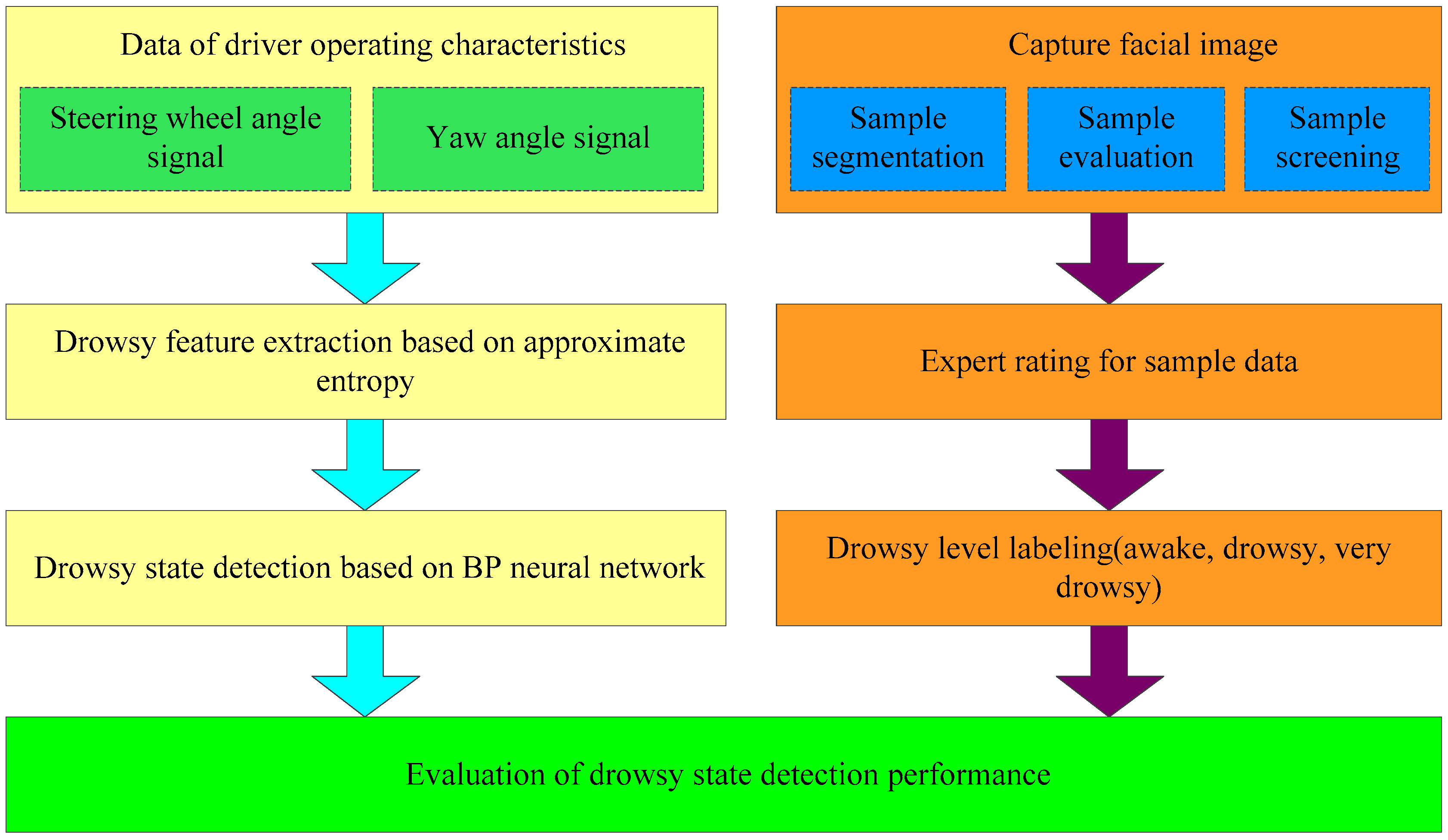
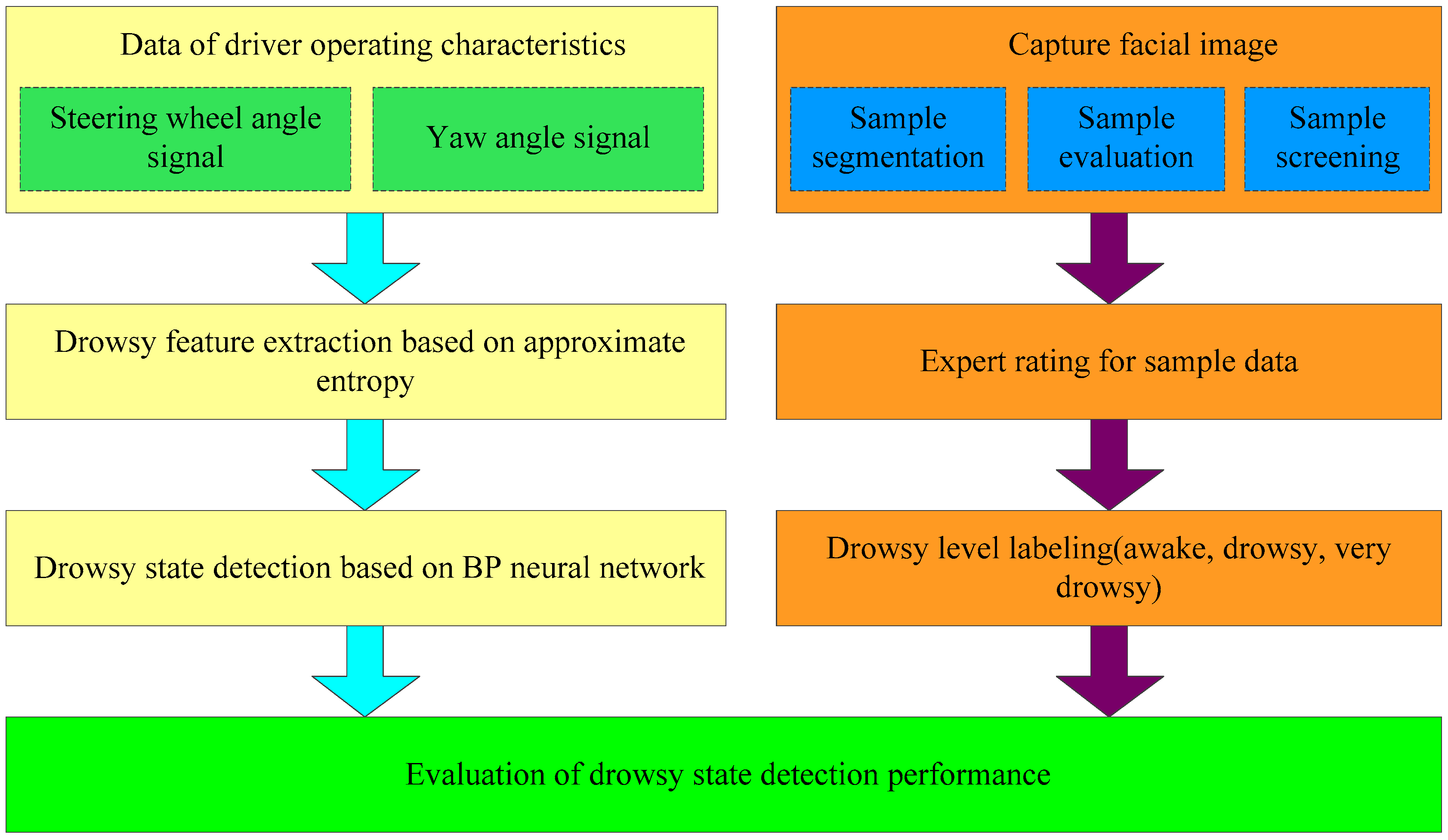
3.1. Fatigue Detection Scheme
3.2. Criteria of Fatigue Level Evaluation
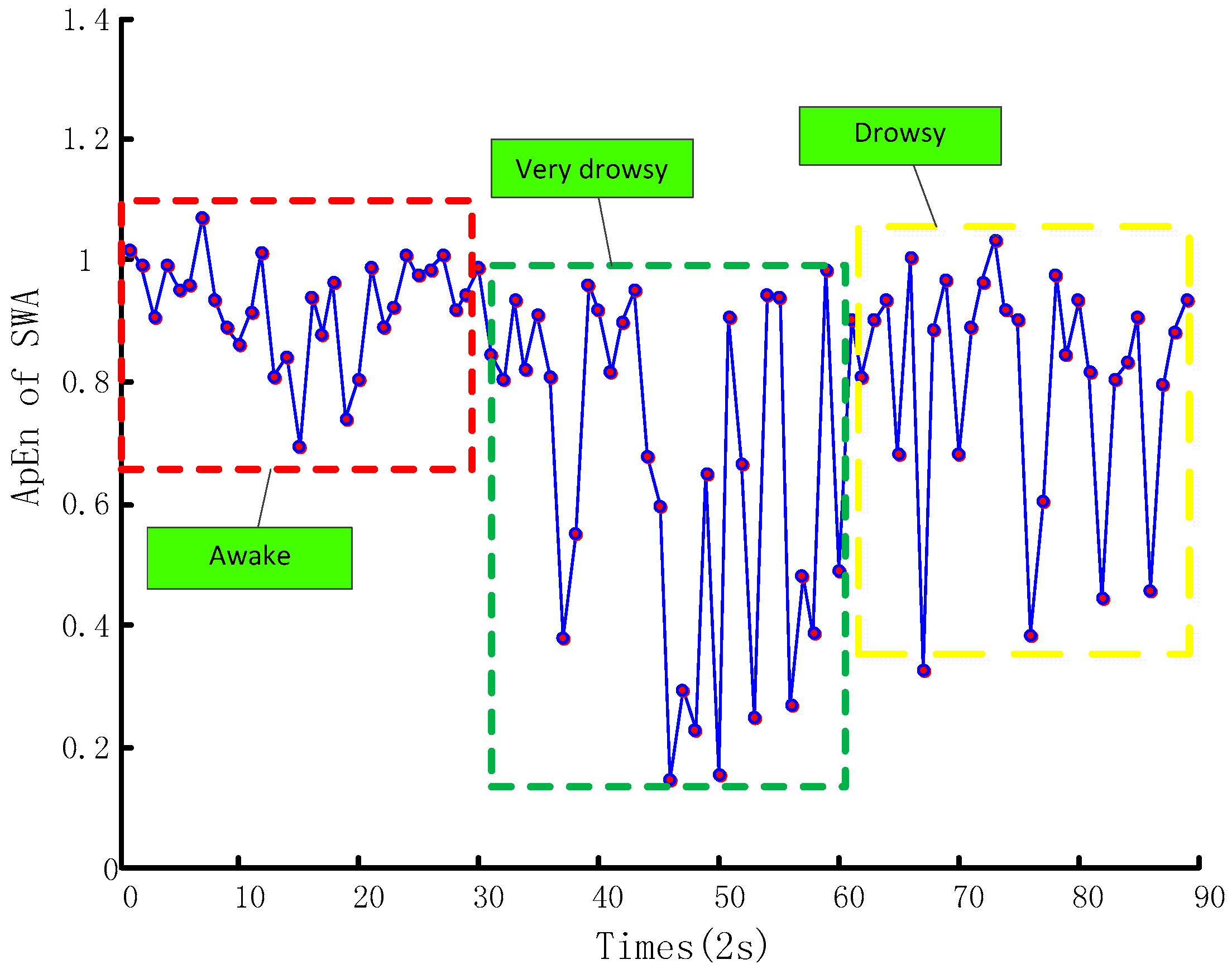
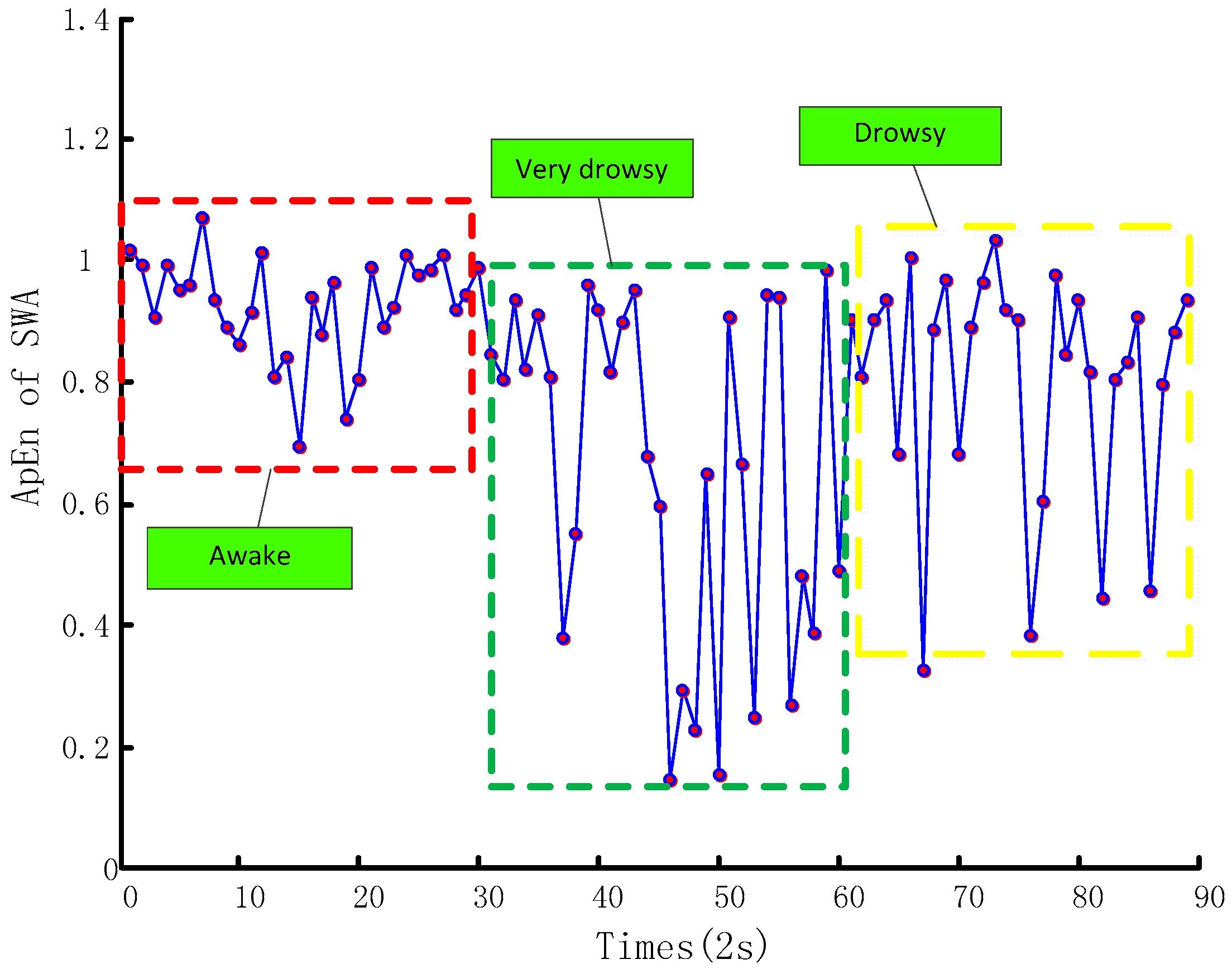
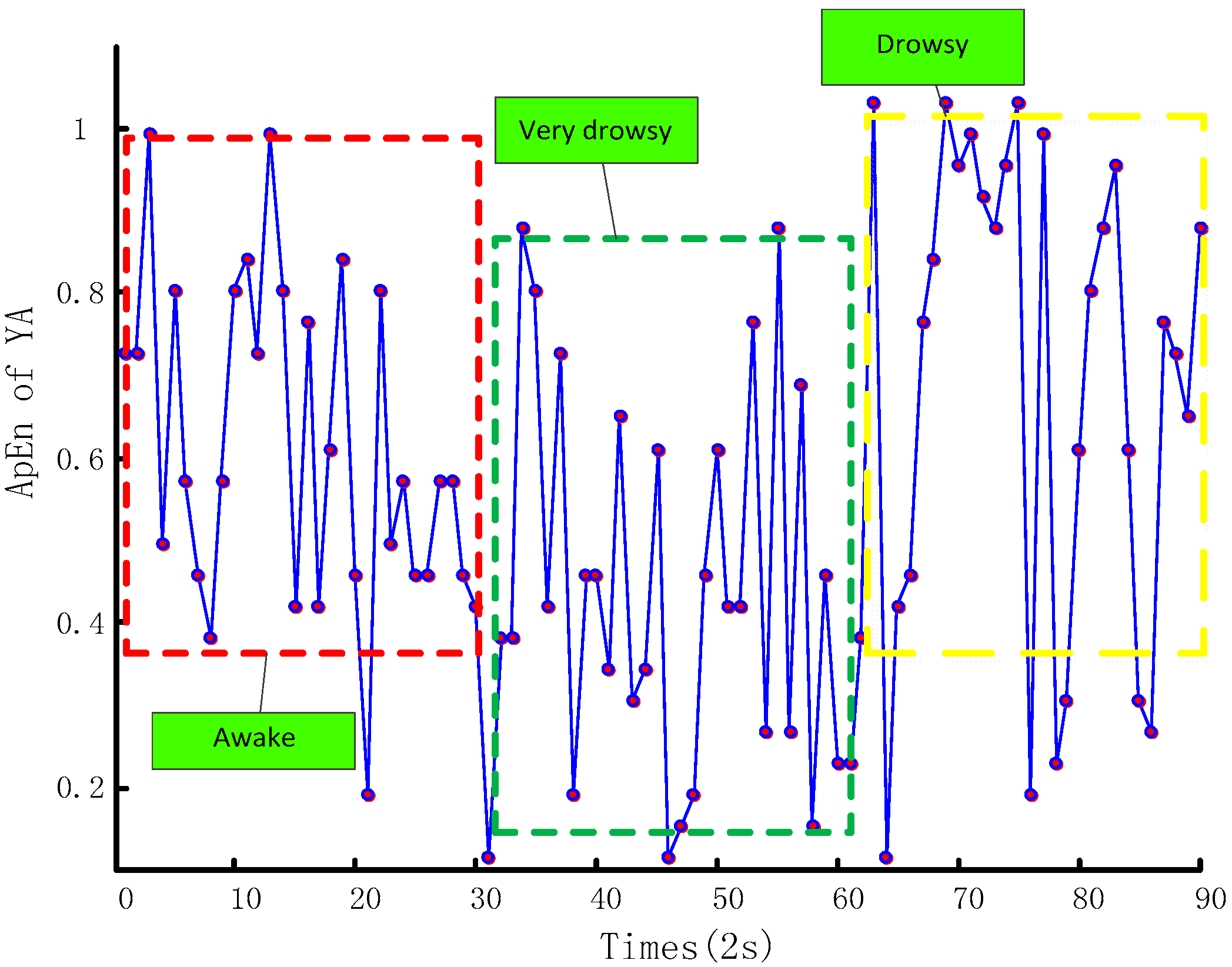
3.3. Extraction of ApEn of Time Series of the Operation Parameters
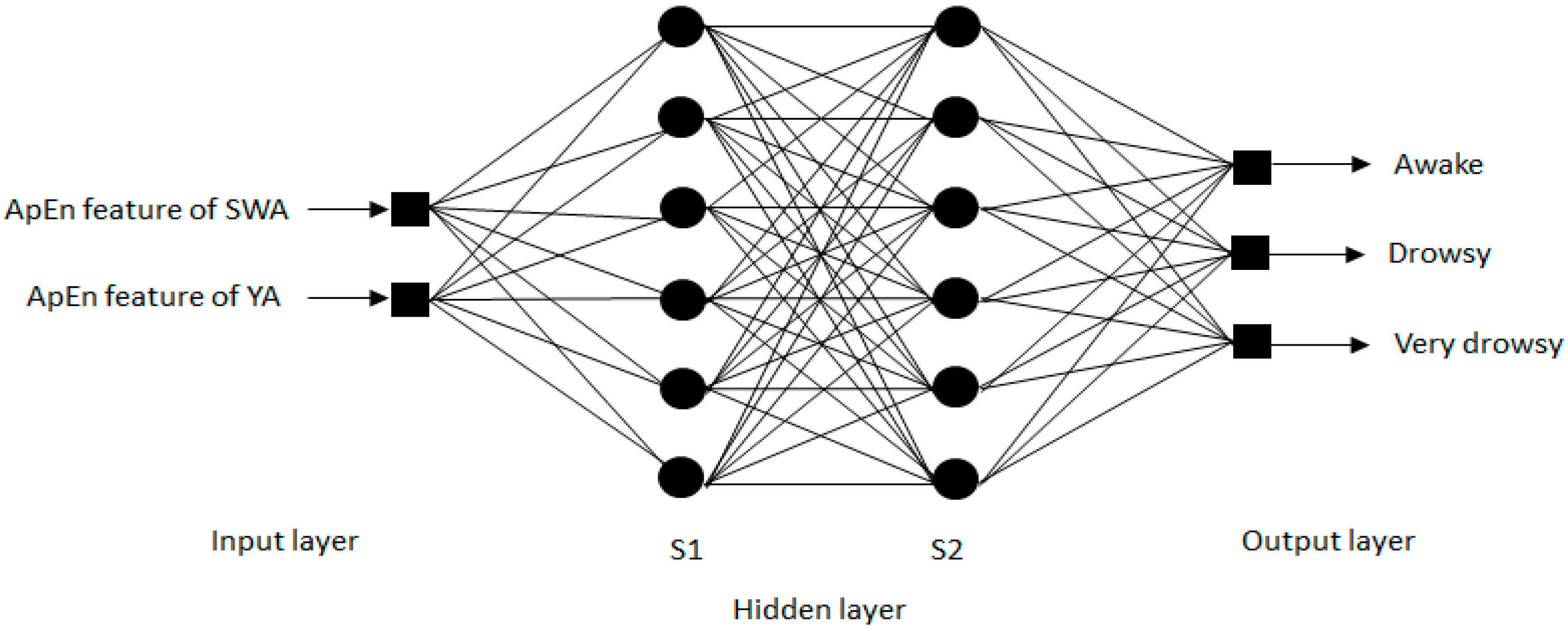
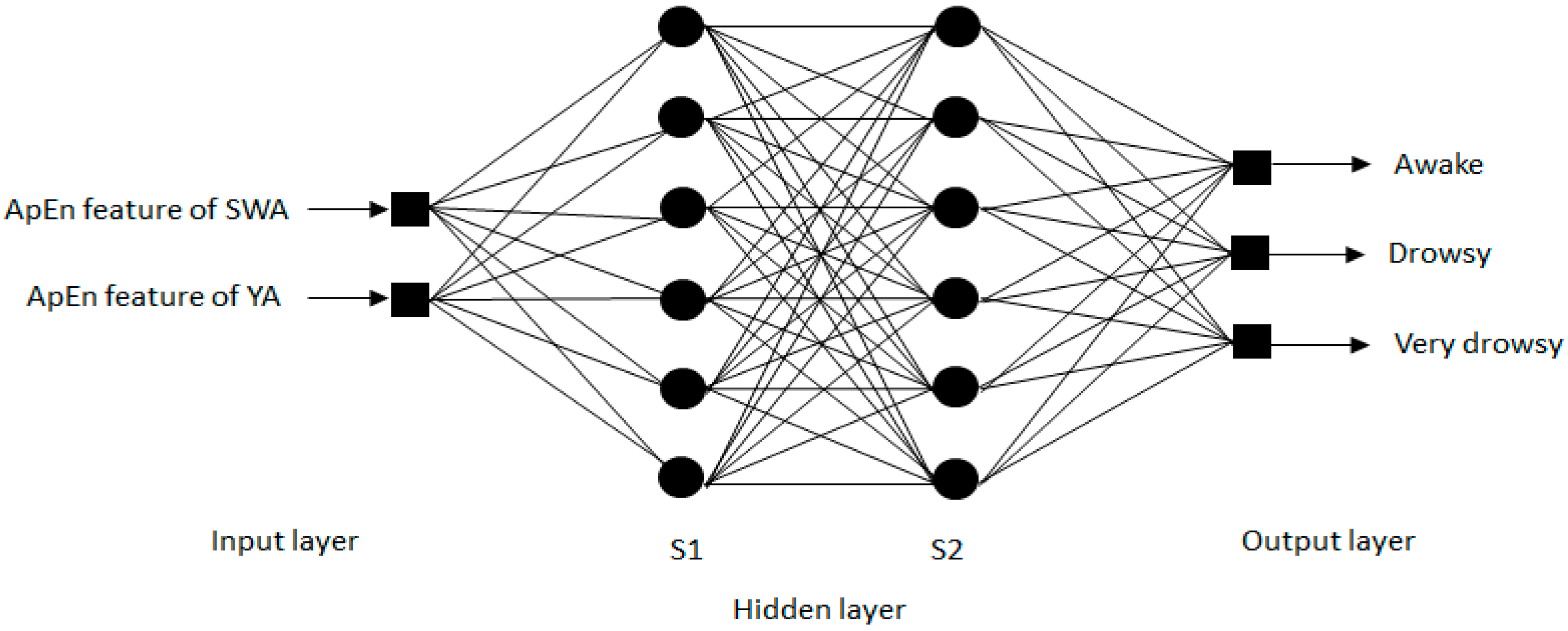
3.4. Detection of Driver Fatigue Based on BP Neural Network
4. Experiments and Results
4.1. Experiment Setup
4.2. Experiment Database
4.3. Experiment Results
4.4. Comparison between Testing Results by Relevant Methods
5. Discussion
6. Conclusions and Future Works
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sahayadhas, A.; Sundaraj, K.; Murugappan, M. Detecting driver drowsiness based on sensors: Review. Sensors 2012, 12, 16937–16953. [Google Scholar] [CrossRef] [PubMed]
- Williamson, A.; Lombardi, D.A.; Folkard, S.; Stutts, J.; Courtney, T.K.; Connor, J.L. The link between fatigue and safety. Accid. Anal. Prev. 2011, 432, 498–515. [Google Scholar] [CrossRef] [PubMed]
- Connor, J.L. The role of driver sleepiness in car crashes: A review of the epidemiological evidence. In Drugs, Driving and Traffic Safety; Springer: Basel, Switzerland, 2009; pp. 187–205. [Google Scholar]
- Khushaba, R.N.; Kodagoda, S.; Lal, S.; Dissanayake, G. Driver drowsiness classification using fuzzy wavelet-packet-based feature-extraction algorithm. IEEE Trans. Biomed. Eng. 2011, 58, 121–131. [Google Scholar] [CrossRef] [PubMed]
- Chai, R.; Naik, G.; Nguyen, T.N.; Ling, S.; Tran, Y.; Craig, A. Driver fatigue classification with independent component by entropy rate bound minimization analysis in an eeg-based system. IEEE J. Biomed. Health Inform. 2016, 21, 715–724. [Google Scholar] [CrossRef] [PubMed]
- Chai, R.; Ling, S.H.; San, P.P.; Naik, G.R.; Nguyen, T.N.; Tran, Y. Improving eeg-based driver fatigue classification using sparse-deep belief networks. Front. Neurosci. 2017, 11. [Google Scholar] [CrossRef] [PubMed]
- Huang, K.C.; Huang, T.Y.; Chuang, C.H.; King, J.T.; Wang, Y.K.; Lin, C.T. An eeg-based fatigue detection and mitigation system. Int. J. Neural Syst. 2016, 26, 1650018. [Google Scholar] [CrossRef] [PubMed]
- Craig, A.; Tran, Y.; Wijesuriya, N.; Nguyen, H. Regional brain wave activity changes associated with fatigue. Psychophysiology 2012, 49, 574–582. [Google Scholar] [CrossRef] [PubMed]
- Picot, A.; Charbonnier, S.; Caplier, A. On-line detection of drowsiness using brain and visual information. IEEE Trans. Syst. Man Cybern. Part A 2012, 42, 764–775. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, H.; Fu, R. Automated detection of driver fatigue based on entropy and complexity measures. IEEE Trans. Intell. Transp. Syst. 2014, 15, 168–177. [Google Scholar] [CrossRef]
- Correa, A.G.; Orosco, L.; Laciar, E. Automatic detection of drowsiness in EEG records based on multimodal analysis. Med. Eng. Phys. 2014, 36, 244–249. [Google Scholar] [CrossRef] [PubMed]
- Jung, S.J.; Shin, H.S.; Chung, W.Y. Driver fatigue and drowsiness monitoring system with embedded electrocardiogram sensor on steering wheel. IET Intell. Transp. Syst. 2014, 8, 43–50. [Google Scholar] [CrossRef]
- Mandal, B.; Li, L.; Wang, G.S.; Lin, J. Towards detection of bus driver fatigue based on robust visual analysis of eye state. IEEE Trans. Intell. Transp. Syst. 2016, 18, 545–557. [Google Scholar] [CrossRef]
- Zhang, X.; Cheng, B.; Feng, R. Real-time detection of driver drowsiness based on steering performance. J. Tsinghua Univ. 2010, 7, 1072–1076. [Google Scholar]
- Qu, X.; Cheng, B.; Lin, Q.; Li, S. Drowsy driving detection based on driver’s steering operation characteristics. Autom. Eng. 2013, 35, 288–291. [Google Scholar]
- Li, Z.J.; Li, S.E.; Li, R.J.; Cheng, B.; Shi, J.L. Driver fatigue detection using approximate entropic features of steering wheel angle from real driving data. Int. J. Robot. Autom. 2017, 32. in press. [Google Scholar]
- Li, Z.J.; Li, S.E.; Li, R.J.; Cheng, B.; Shi, J.L. Online Detection of Driver Fatigue Using Steering Wheel Angles for Real Driving Conditions. Sensors 2017, 17, 495. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.Q.; Lu, M.; Li, K.Q. Characterization of longitudinal driving behavior by measurable parameters. Transp. Res. Rec. 2010, 2185, 15–23. [Google Scholar] [CrossRef]
- Wang, J.Q.; Zhang, L.; Zhang, D.Z. An adaptive longitudinal driving assistance system based on driver characteristics. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1–12. [Google Scholar] [CrossRef]
- Wang, J.Q.; Li, S.E.; Zhang, Y. Longitudinal collision mitigation via coordinated braking of multiple vehicles using model predictive control. Integr. Comput. Aided Eng. 2015, 22, 171–185. [Google Scholar]
- Fukuda, J.; Akutsu, E.; Aoki, K. Estimation of driver’sdrowsiness level using interval of steering adjustment for lane keeping. JSAE Rev. 1995, 16, 197–199. [Google Scholar] [CrossRef]
- Eskandarian, A.; Mortazavi, A. Evaluati on of a smart algorithm for commercial vehicle driver drowsiness detection. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 July 2007; pp. 553–559. [Google Scholar]
- Bittner, R.; Hana, K.; Pousek, L. Detecting of fatiguestates of a car driver. In Proceedings of the International Symposium on Biological and Medical Data Analysis, Frankfurt, Germany, 29–30 Septrmber 2000; pp. 260–273. [Google Scholar]
- Krajewski, J.; Golz, M.; Sommer, D. Detecting sleepy drivers by pattern recognition based analysis of steering wheel behavior. In Proceedings of the Fifth International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design, Big Sky, MT, USA, 22–25 June 2009; pp. 118–224. [Google Scholar]
- Wierwille, W.W.; Ellsworth, L.A. Evaluation of driver drowsiness by trained raters. Accid. Anal. Prev. 1994, 26, 571–581. [Google Scholar] [CrossRef]
- Qu, X.; Chen, B. Detection of Driver Drowsiness Based on Steering Operation and Vehicle State. Master’s Thesis, Tsinghua University, Beijing, China, 2012. [Google Scholar]
- Pincus, S.M.; Goldberger, A.L. Physiological time-series analysis: What does regularity quantify? Am. J. Physiol. 1994, 266, 1643–1656. [Google Scholar]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, 2039–2049. [Google Scholar]
- Zhang, Z.; Zhou, Y.; Chen, Z.Y.; Tian, X.H.; Du, S.H.; Huang, R.M. Approximate entropy and support vector machines for electroencephalogram signal classification. Neural Regen. Res. 2013, 8, 1844–1852. [Google Scholar] [PubMed]
- Lin, L.; Chu, F.L. Approximate entropy as acoustic emission feature parametric data for crack detection. Nondestruct. Test. Eval. 2011, 26, 119–128. [Google Scholar] [CrossRef]
- He, Y.; Zhang, X. Approximate entropy analysis of the acoustic emission from defects in rolling element bearings. J. Vib. Acoust. 2012, 134, 969–970. [Google Scholar] [CrossRef]
- Kumar, Y.; Dewal, M.L.; Anand, R.S. Epileptic seizure detection using DWT based fuzzy approximate entropy and support vector machine. Neurocomputing 2014, 133, 271–279. [Google Scholar] [CrossRef]
- Yentes, J.M.; Hunt, N.; Schmid, K.K.; Kaipust, J.P.; McGrath, D.; Stergiou, N. The appropriate use of approximate entropy and sample entropy with short data sets. Ann. Biomed. Eng. 2013, 41, 349–365. [Google Scholar] [CrossRef] [PubMed]
- Pincus, S.M. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef] [PubMed]
- Cao, X.; Zhu, D.; Yang, S.X. Multi-auv target search based on bio inspired aerodynamics model in 3-d underwater environments. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 2364–2374. [Google Scholar] [CrossRef] [PubMed]
- Chu, Z.; Zhu, D.; Yang, S.X. Observer-based adaptive neural network trajectory tracking control for remotely operated vehicle. IEEE Trans. Neural Netw. Learn. Syst. 2016, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Ni, J.; Li, X.; Hua, M.; Shen, J. Bio inspired neural network based q-learning approach for robot path planning in unknown environments. Int. J. Robot. Autom. 2016, 31, 4526–4590. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Driving Status | Fatigue Label | Features |
|---|---|---|
| Awake | 1 | The head stays upright, and facial expressions are rich. Attentive to the environment. Eyes open widely and blink quickly and eyeballs move actively. |
| Drowsy | 2 | Attention to the outside world decreases. Drivers make gestures like scratching faces, shaking head, winking, swallowing, sighing, deep breathing, and yawning. Eyes tend to close, blink slowly with less eyeball activity. |
| Very drowsy | 3 | Eyes close further with eyelids becoming heavier. Eyes are closing for a longer time. Drivers may nap, nod, slant their heads, and then lose the ability to drive. |
| Serial No. of Subjects | Number of Samples | Fatigue Level |
|---|---|---|
| 910_002 | 34 | (0,1) |
| 910_004 | 48 | (0,1,2) |
| 911_003 | 29 | (0,1) |
| 912_007 | 24 | (0,1) |
| 913_002 | 23 | (0,1) |
| 913_004 | 54 | (0,1,2) |
| Detection Results | ||||
|---|---|---|---|---|
| “Awake” (Level 0) | “Drowsy” (Level 1) | “Very drowsy” (Level 2) | ||
| Expert classification | “Awake” (Level 0) | 92.50% | 7.50% | 7.00% |
| “Drowsy”(Level 1) | 7.50% | 84.60% | 14.11% | |
| “Very drowsy”(Level 2) | 0.00% | 7.90% | 78.89% | |
| Samples | 112 | 72 | 28 | |
| Experiment Data | Method | Average Correct Rate (%) |
|---|---|---|
| SWA for laboratory driving conditions [14] | Statistical Feature + Fisher | 82.00 |
| SWA for laboratory driving conditions [15] | Statistical Feature + SVM | 87.70 |
| SWA for real driving conditions [16] | ApEn Feature + Designed model | 82.07 |
| SWA for real driving conditions [17] | ApEn Feature + Designed model | 78.01 |
| SWA and YA for real driving conditions (presented in this paper) | ApEn Feature + BP NN | 88.02 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Chen, L.; Peng, J.; Wu, Y. Automatic Detection of Driver Fatigue Using Driving Operation Information for Transportation Safety. Sensors 2017, 17, 1212. https://doi.org/10.3390/s17061212
Li Z, Chen L, Peng J, Wu Y. Automatic Detection of Driver Fatigue Using Driving Operation Information for Transportation Safety. Sensors. 2017; 17(6):1212. https://doi.org/10.3390/s17061212
Chicago/Turabian StyleLi, Zuojin, Liukui Chen, Jun Peng, and Ying Wu. 2017. "Automatic Detection of Driver Fatigue Using Driving Operation Information for Transportation Safety" Sensors 17, no. 6: 1212. https://doi.org/10.3390/s17061212
APA StyleLi, Z., Chen, L., Peng, J., & Wu, Y. (2017). Automatic Detection of Driver Fatigue Using Driving Operation Information for Transportation Safety. Sensors, 17(6), 1212. https://doi.org/10.3390/s17061212