
An Algorithm for Timely Transmission of Solicitation Messages in RPL for Energy-Efficient Node Mobility

Abstract
:1. Introduction
2. Motivation and Related Works
3. Proposed Algorithm for Energy-Efficient Node Mobility
3.1. Procedure of the Proposed Algorithm
- : The mobile node participates in LLN for the first time, selects the parent and forms DODAG.
- : The information of the previous parent node is renewed while the mobile node is moving.
- : The information of the previous parent node does not exist at the new location.
- : The mobile node leaves the LLN.
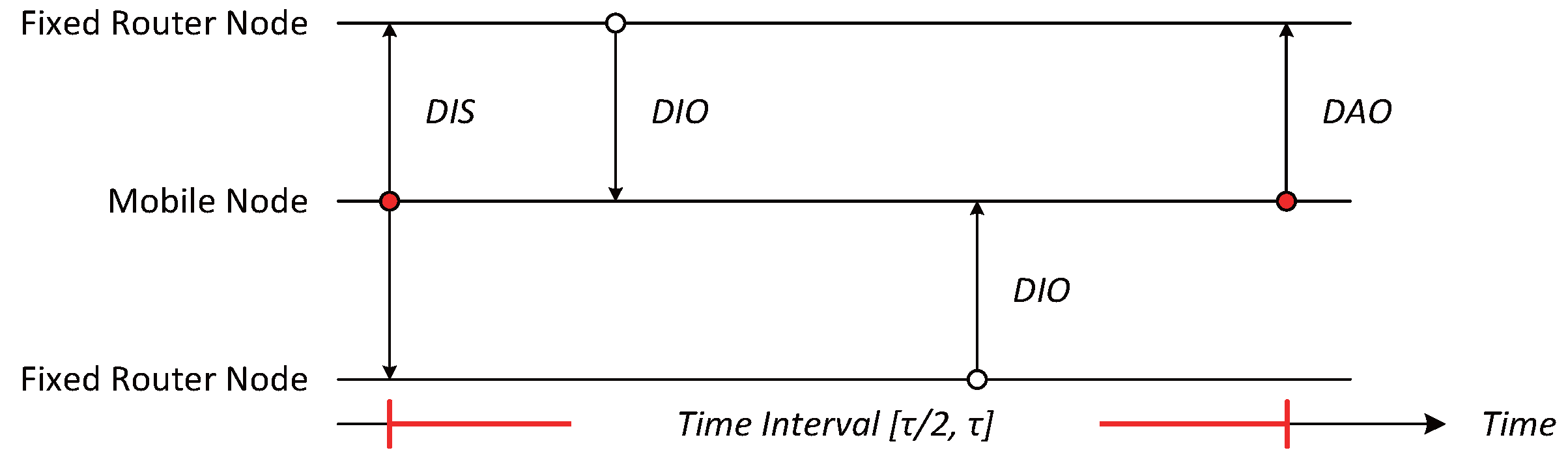
- Initialization phase: While the proposed algorithm is similar to the trickle algorithm in that and are set, the proposed algorithm does not have a redundancy constant k. Instead, it has a parent list table. When the algorithm is first executed, is set as , and the parent list table and the current time are initialized. The represents an interval where means migration time predictable. The interval is described in more detail in Section 3.2.3. The time information possessed by a mobile node is based on the time measured using the internal clock of the device. Moreover, because the information is used independently in the network, there is no need to synchronize the time of the entire network.
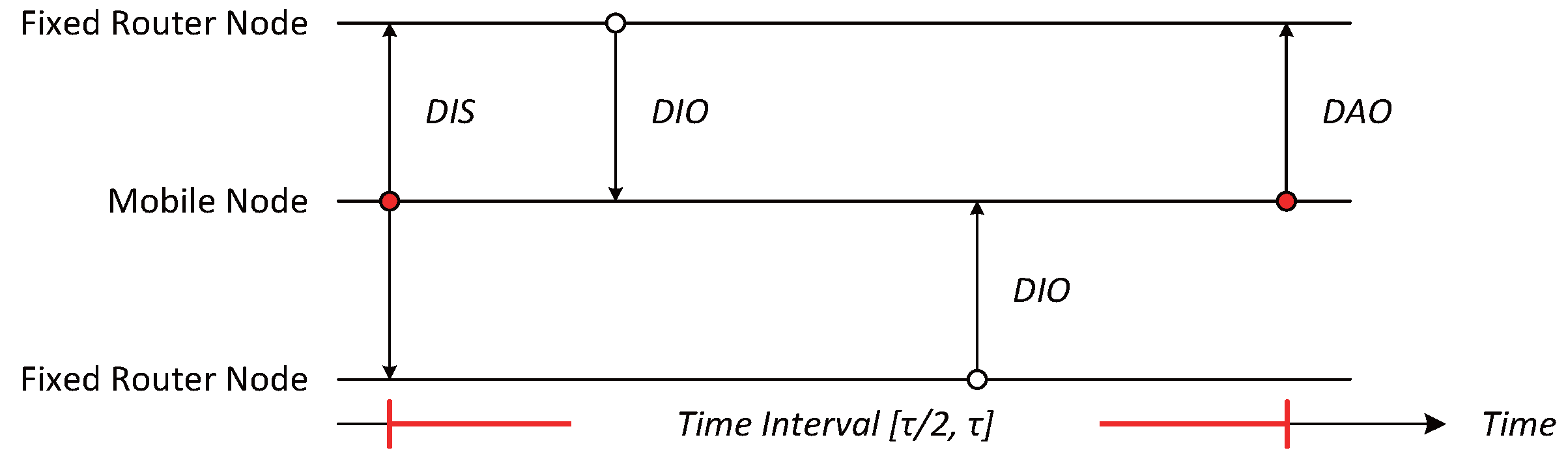
- Receiving information of neighboring router nodes: When the algorithm is started, DIS messages are transmitted to the neighboring router nodes, and DIO messages required for parent selection are received from the neighboring nodes until expires.
- Scenario-based parent selection: Afterward, if the current time reaches , a parent node is selected based on the scenarios presented in Section 3.3.
- Adjusting the time interval: A DAO message is sent to the router node selected as the parent, and the interval used for the selection of the next parent is dynamically adjusted based on Equation (7) described in Section 3.2.3.
- Reinitialization of parameters: Next, the current time of the mobile node and the PP attributes in the parent list table are initialized. If there are no values for the PP attributes in the parent list table when the current time reaches , all values necessary for the mobile node to select the parent node are reset to the values when the algorithm was first executed.
| Algorithm 1 Proposed algorithm |
|
3.2. A Time Interval Calculated According to the Moving Speed and Distance of a Mobile Node
3.2.1. Velocity Estimation of the Mobile Node
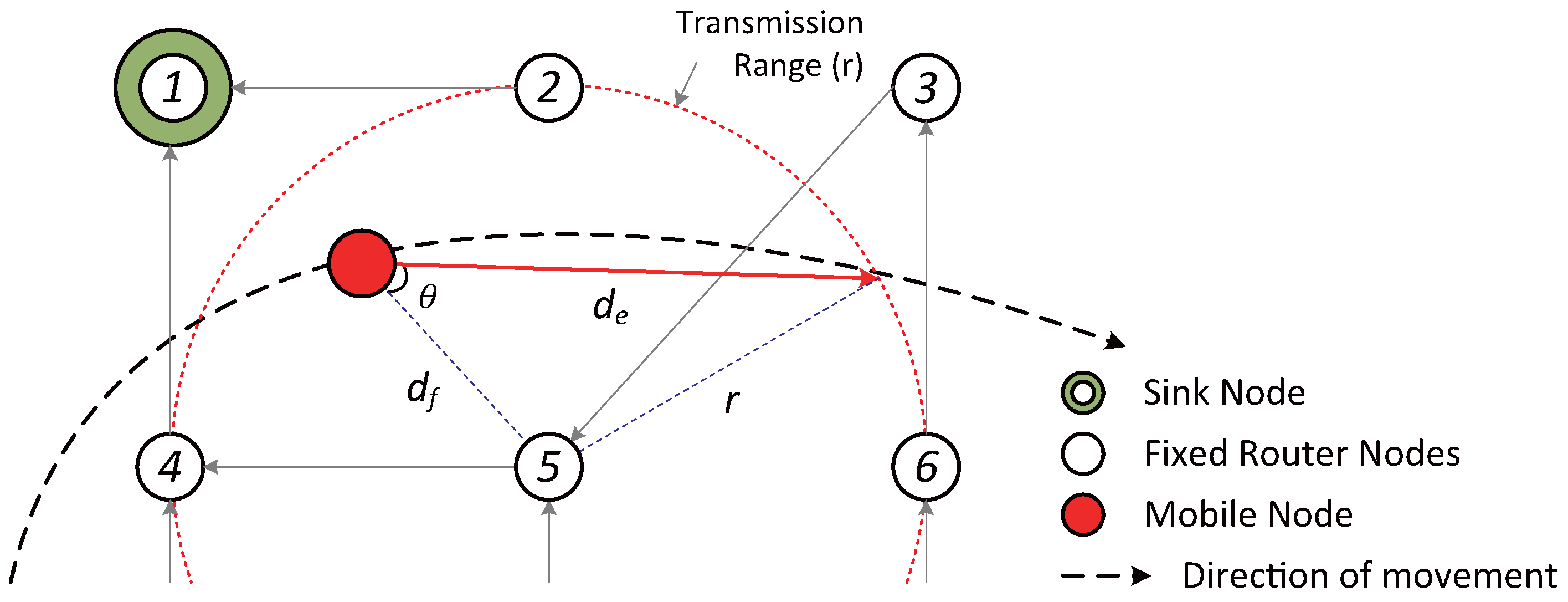
3.2.2. Estimation of Distance to Escape the Transmission Range of a Parent Node
3.2.3. Calculation of the Interval in the Proposed Algorithm
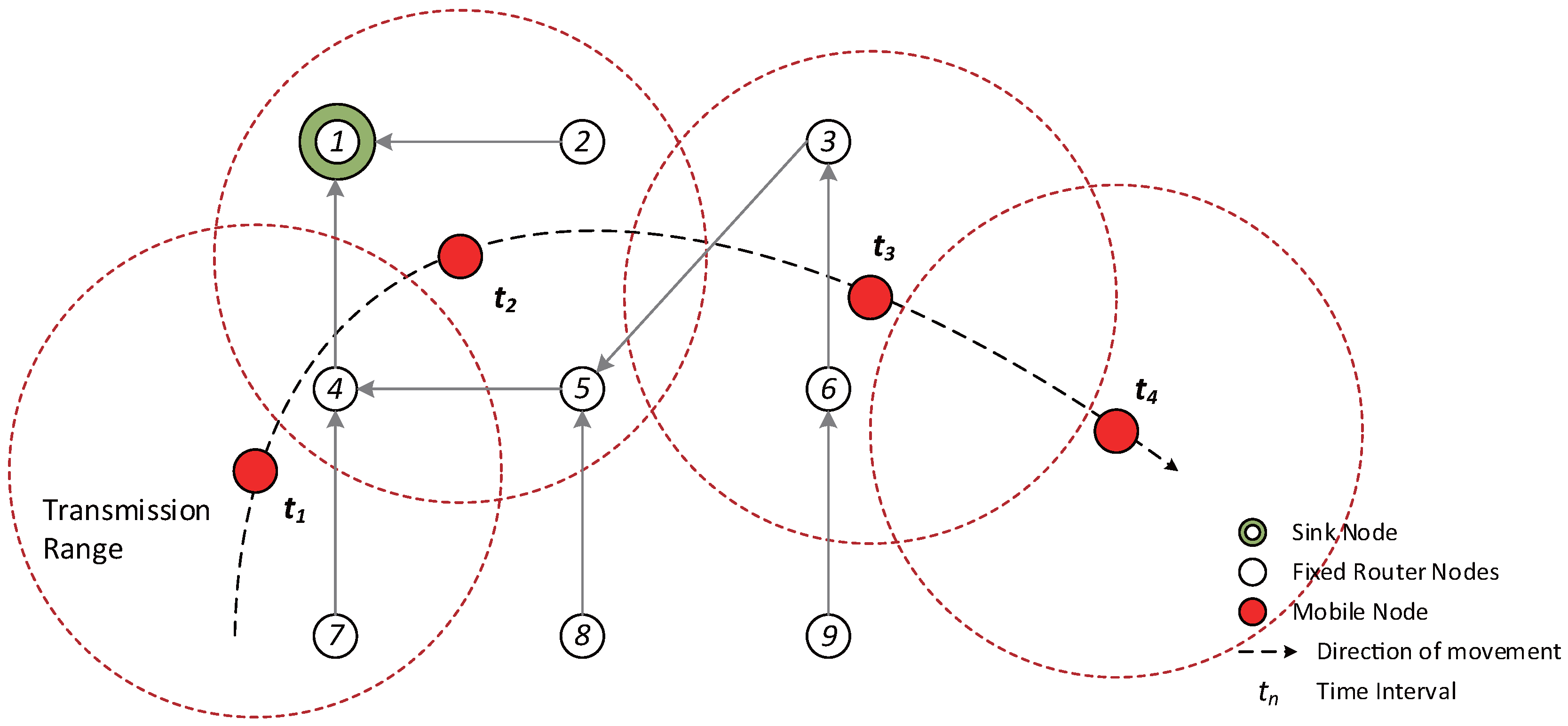
3.3. Scenarios Based on Mobile Node Movement
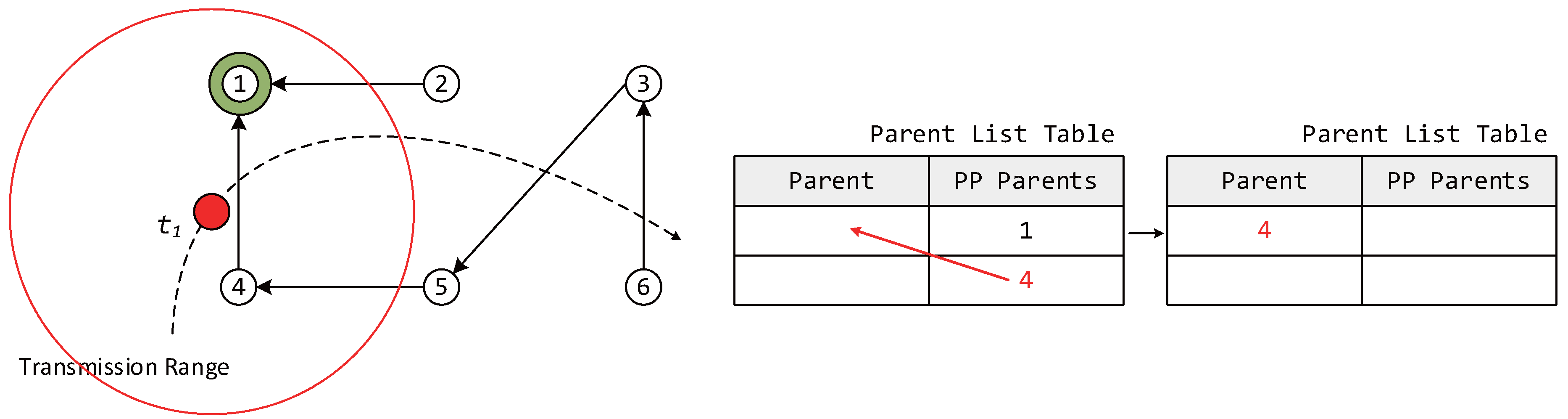
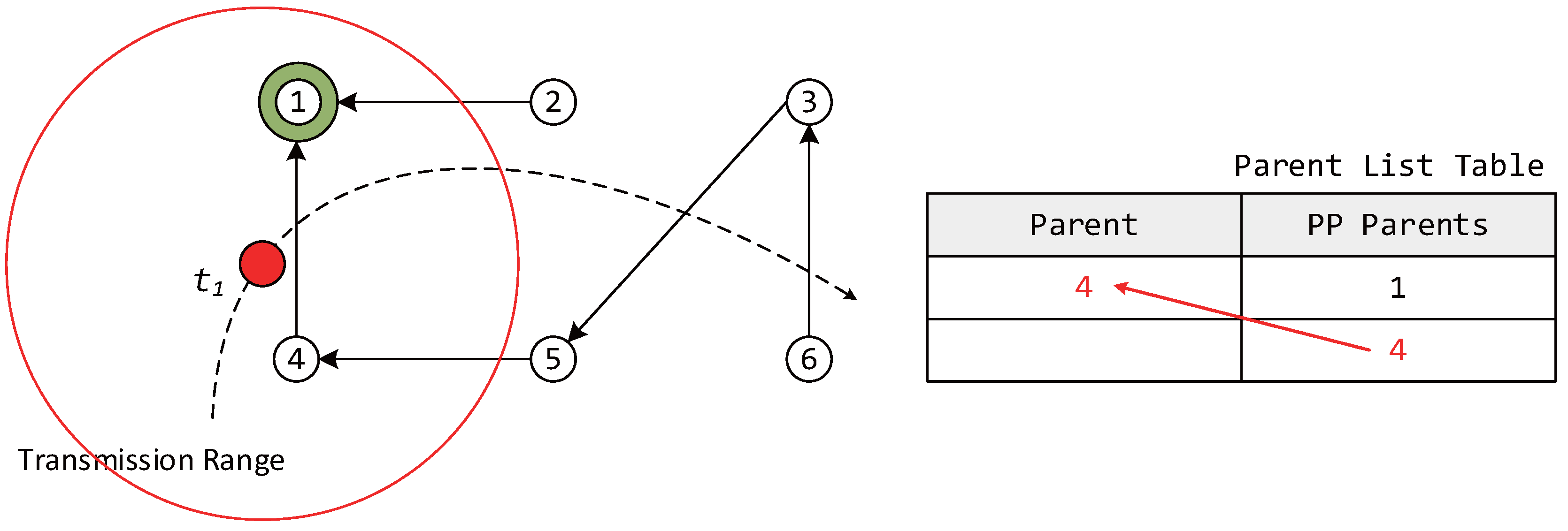
3.3.1. Case of a Mobile Node Participating in LLN for the First Time, Selecting the Parent and Forming a DODAG
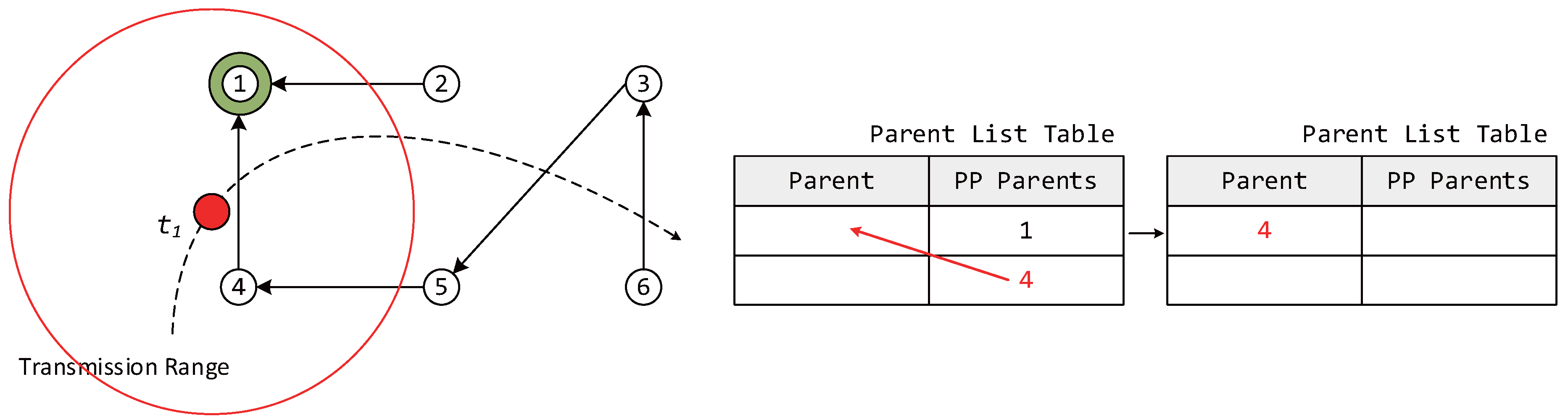
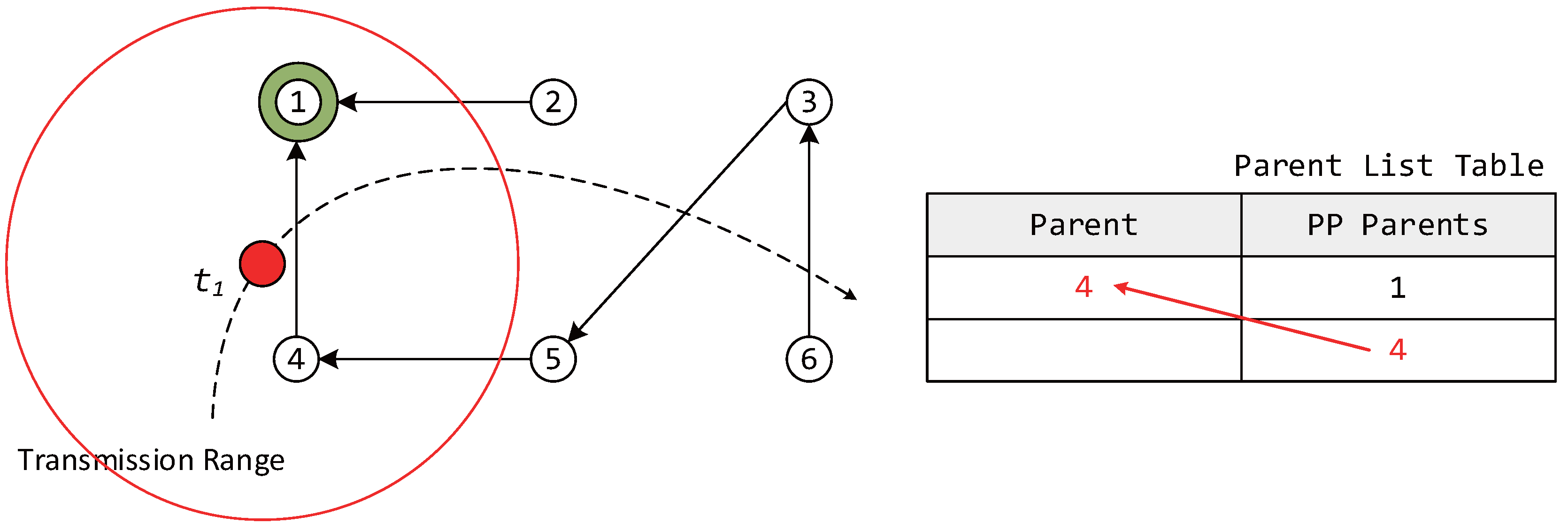
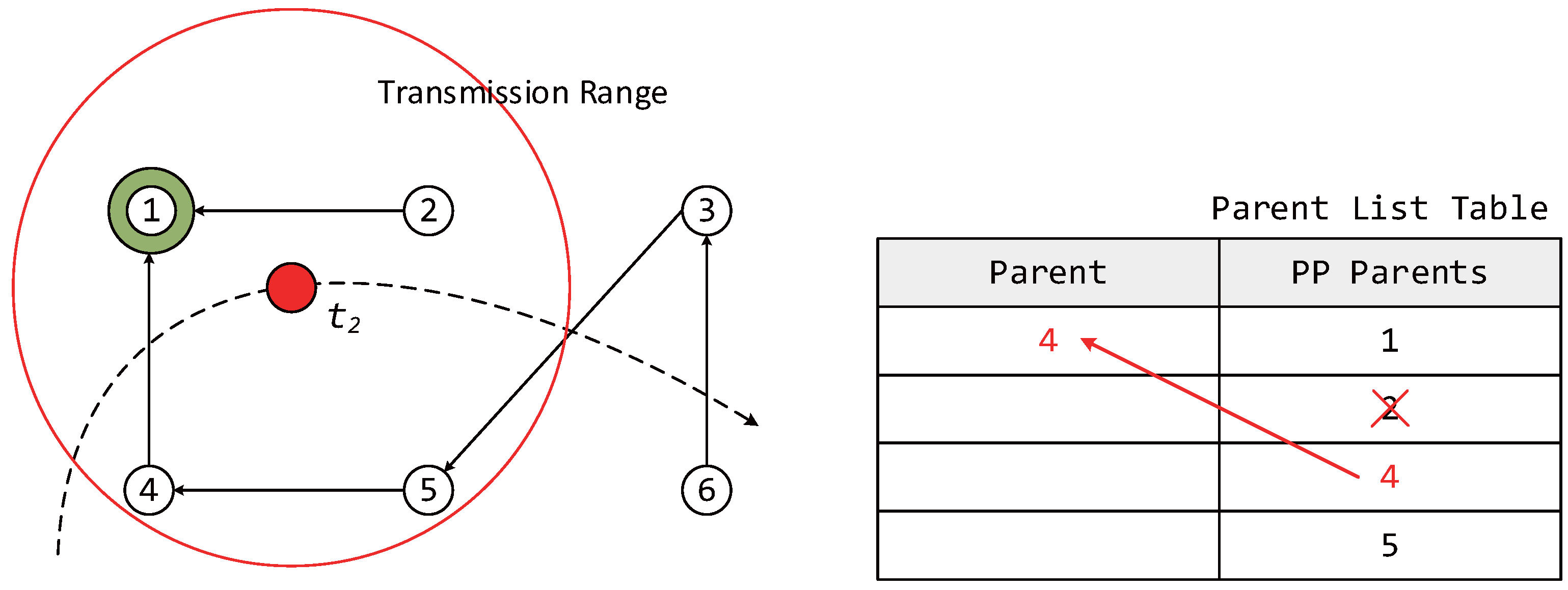
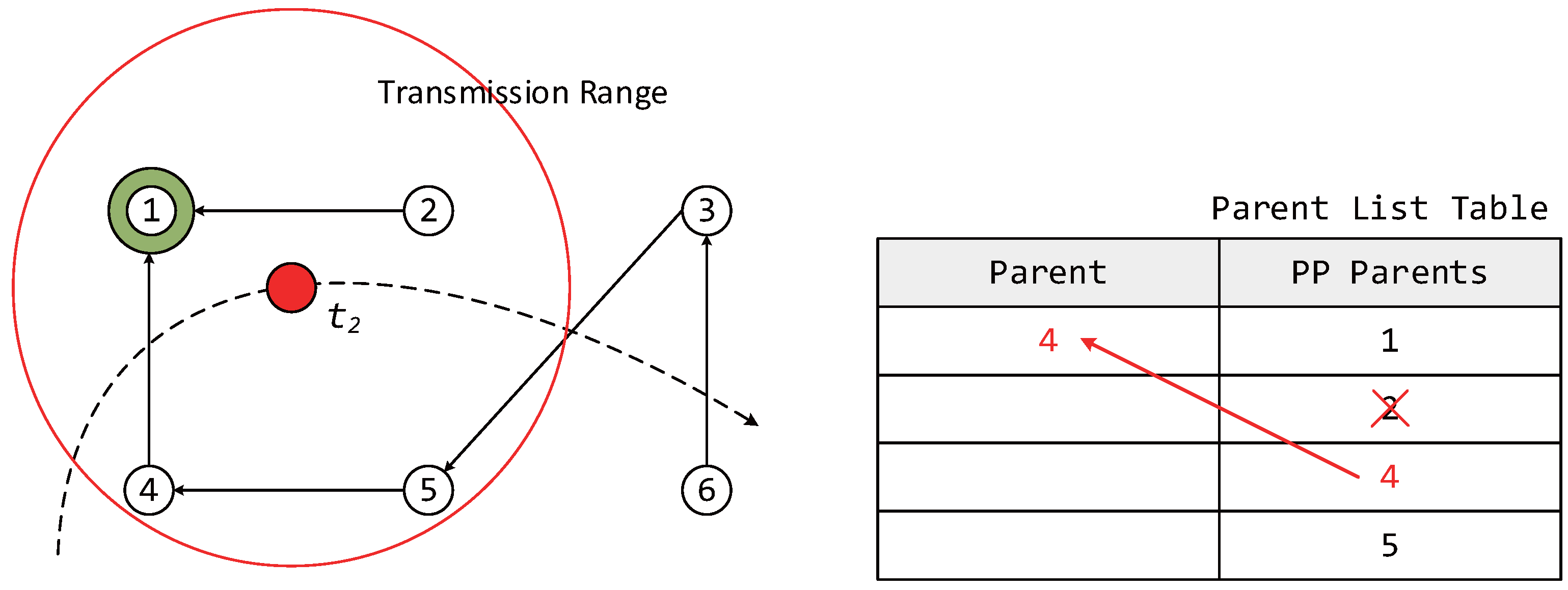
3.3.2. Case of Parent Node Information Being Renewed during the Motion of the Mobile Node
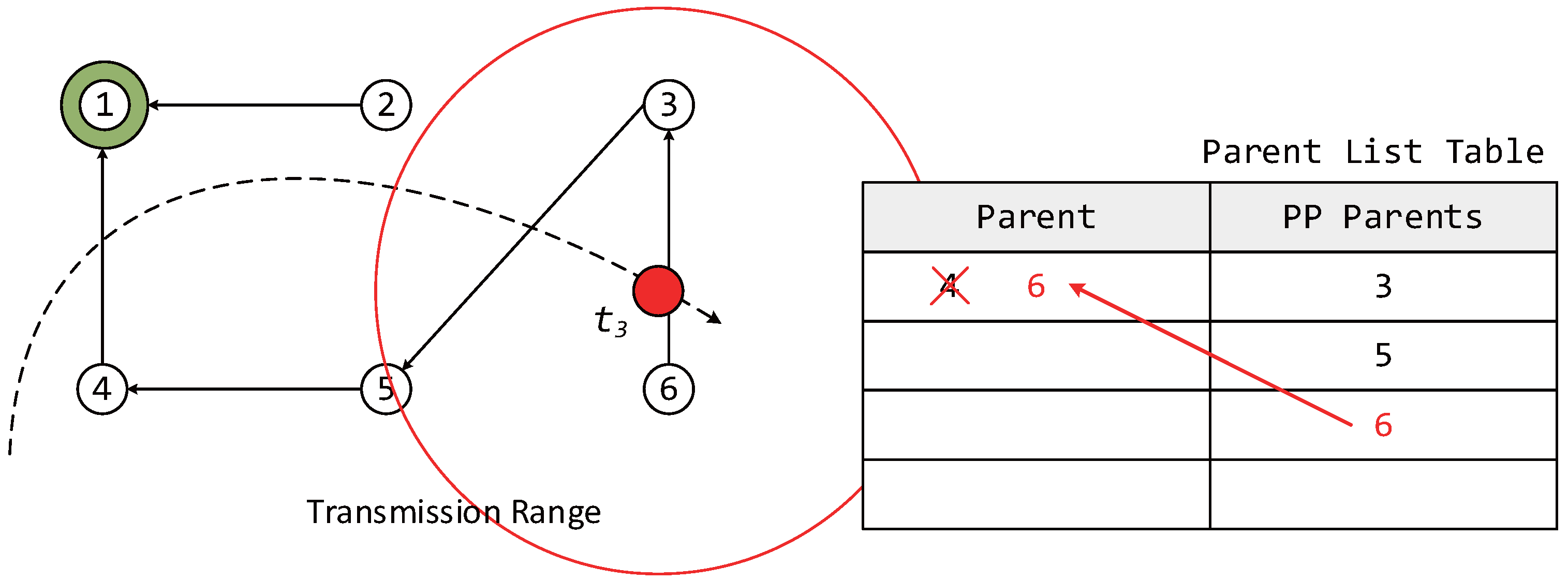
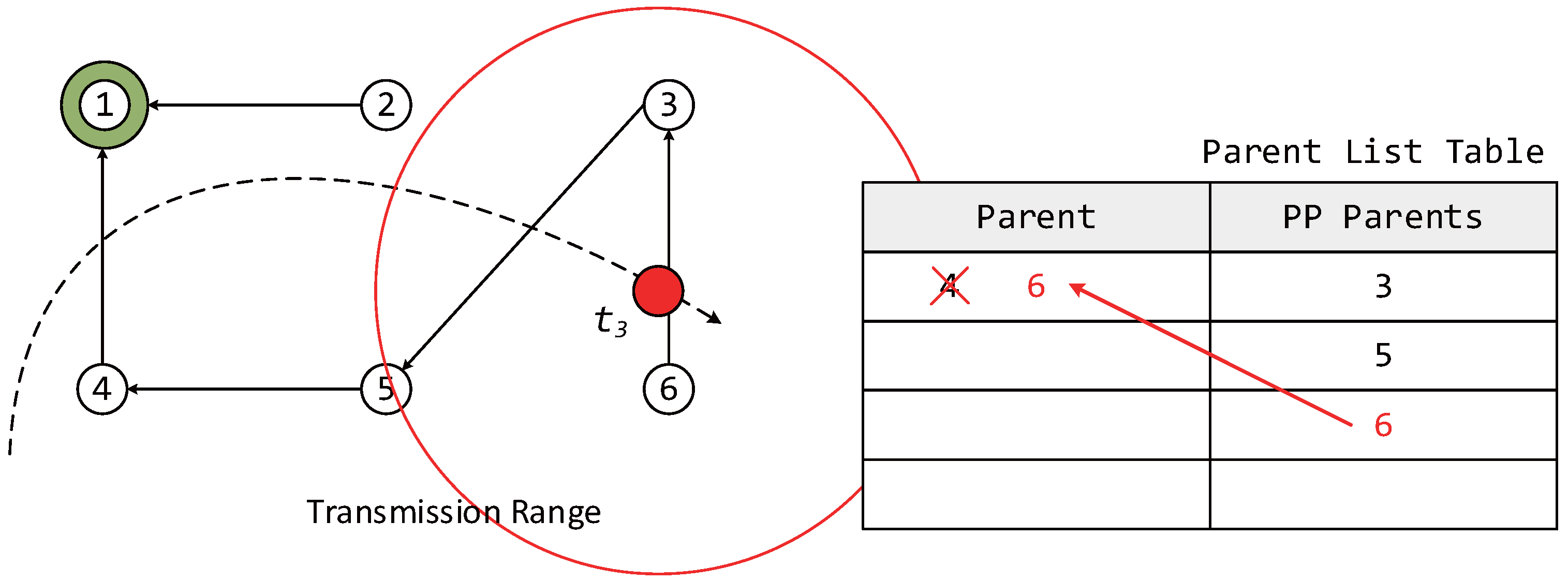
3.3.3. Case Where the Information of the Previous Parent Node Is Not Found at the New Location
3.3.4. Case Where a Mobile Node Escapes the LLN
4. Simulation Environment
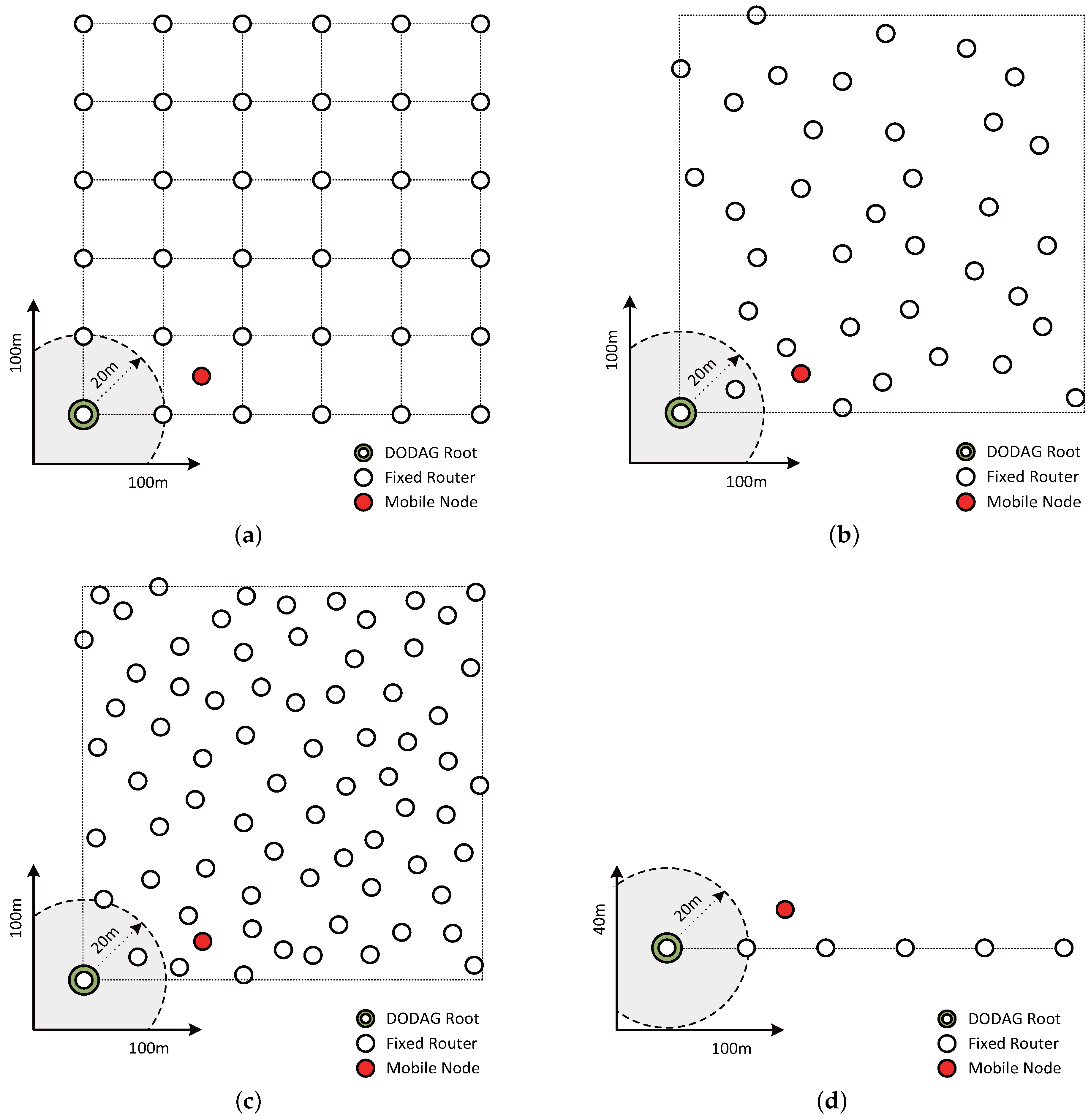
4.1. Parameters and Network Topology for Simulation
4.2. Energy Model for Simulation
5. Performance Evaluations
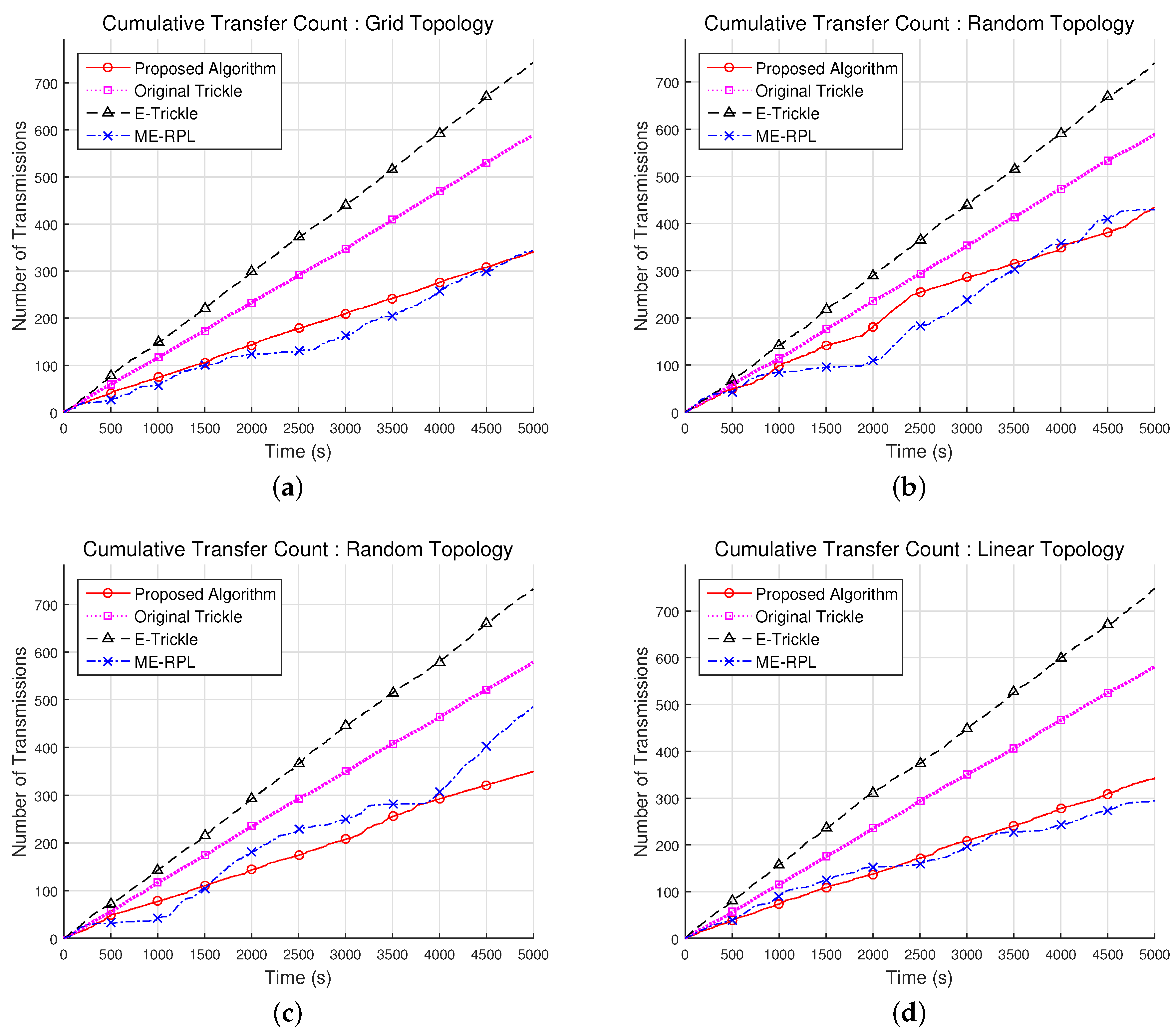
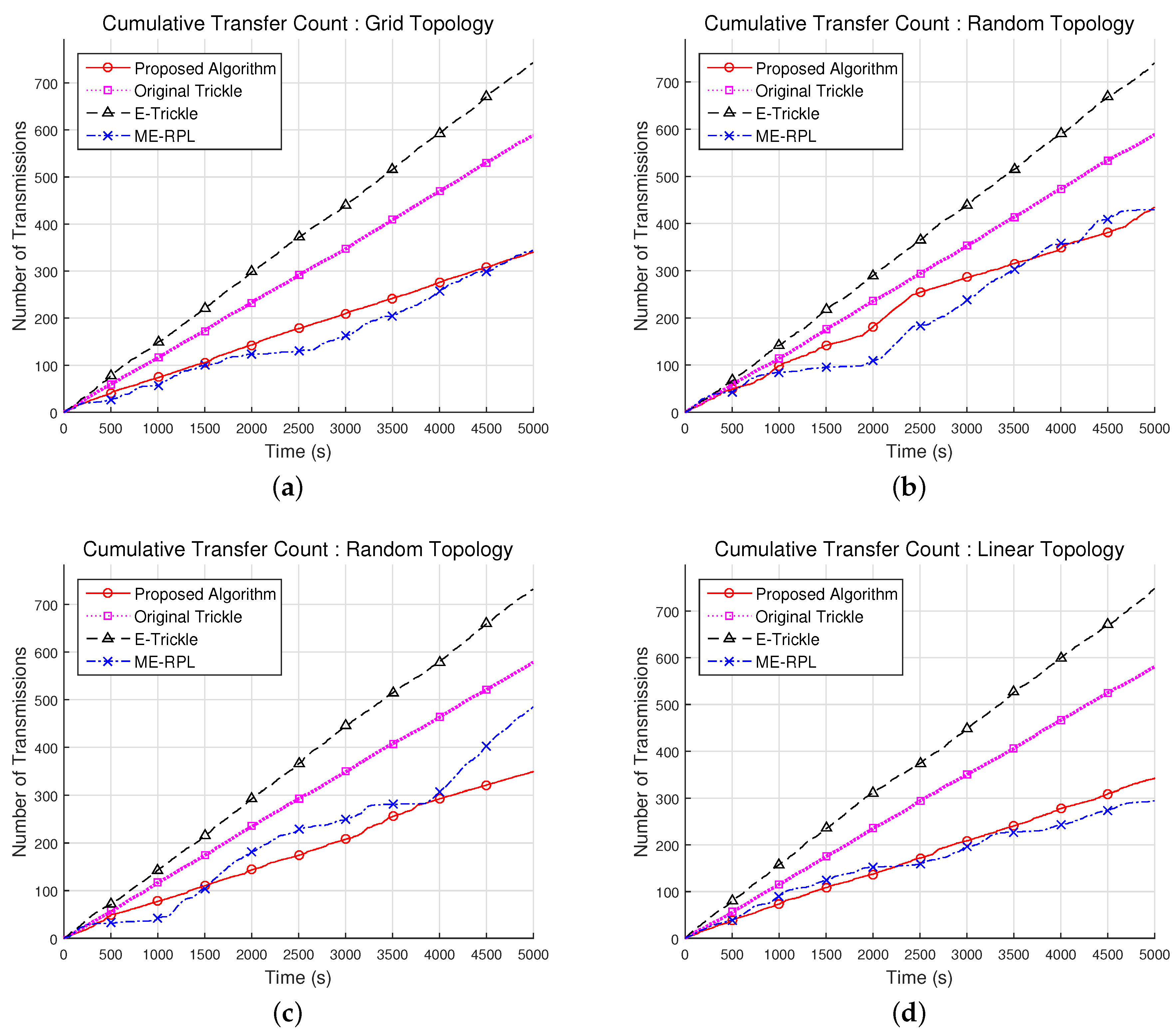
5.1. Cumulative Transfer Count
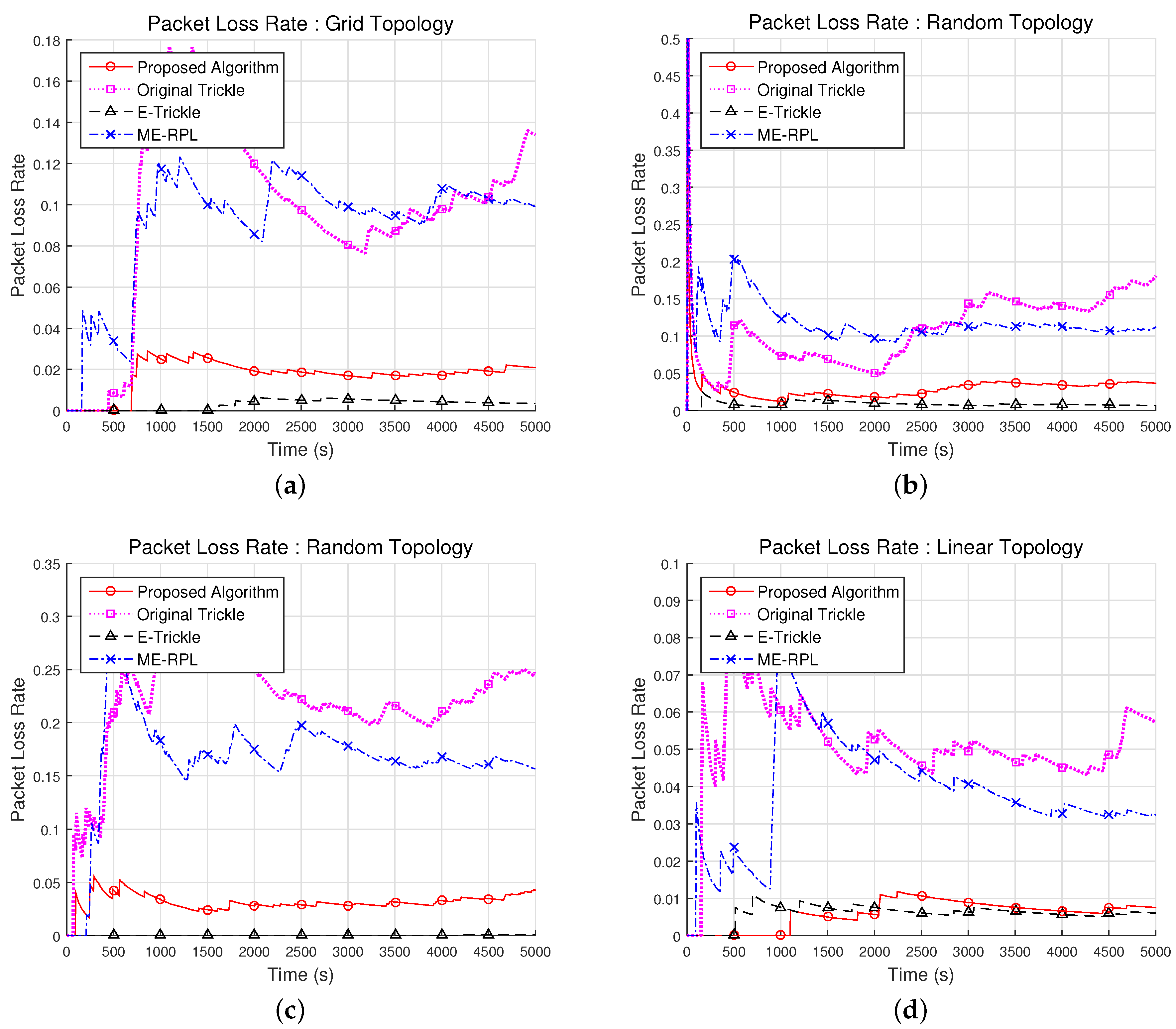
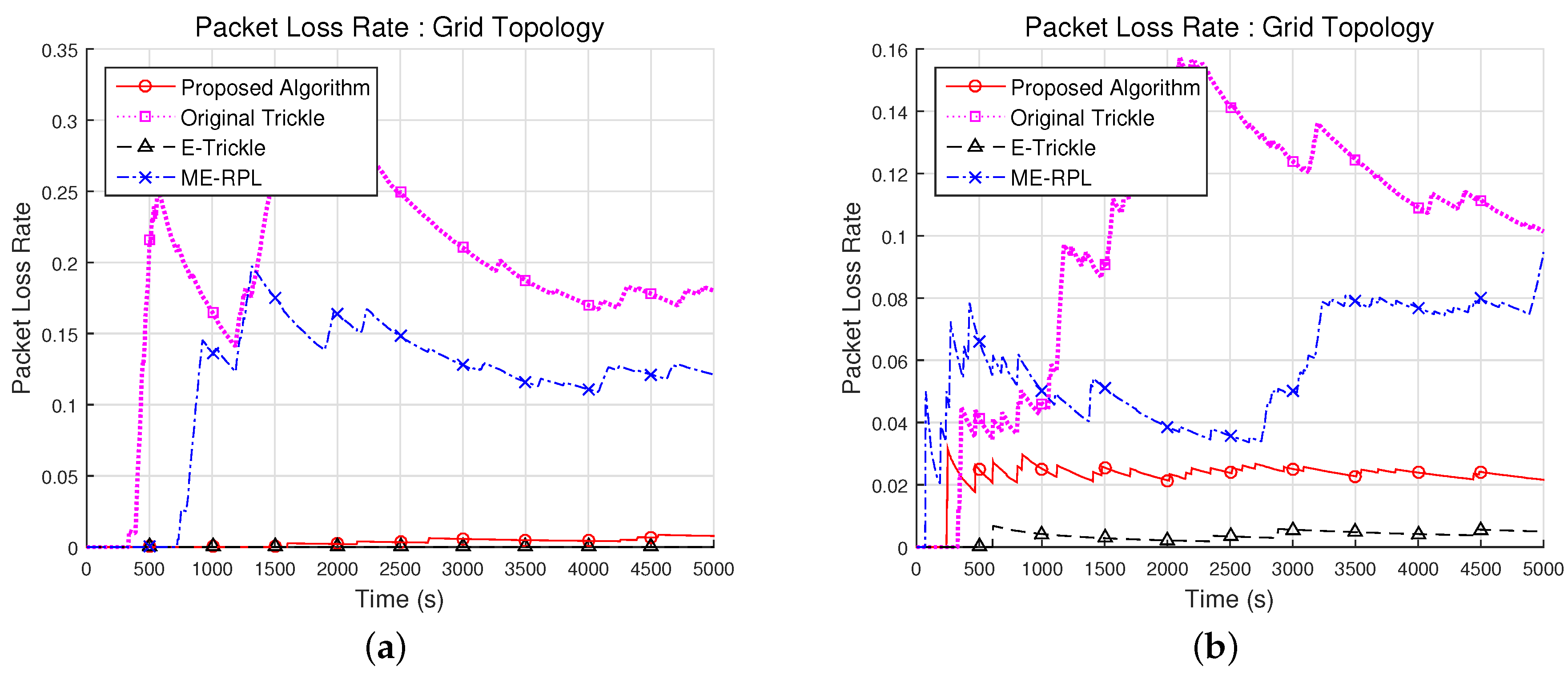
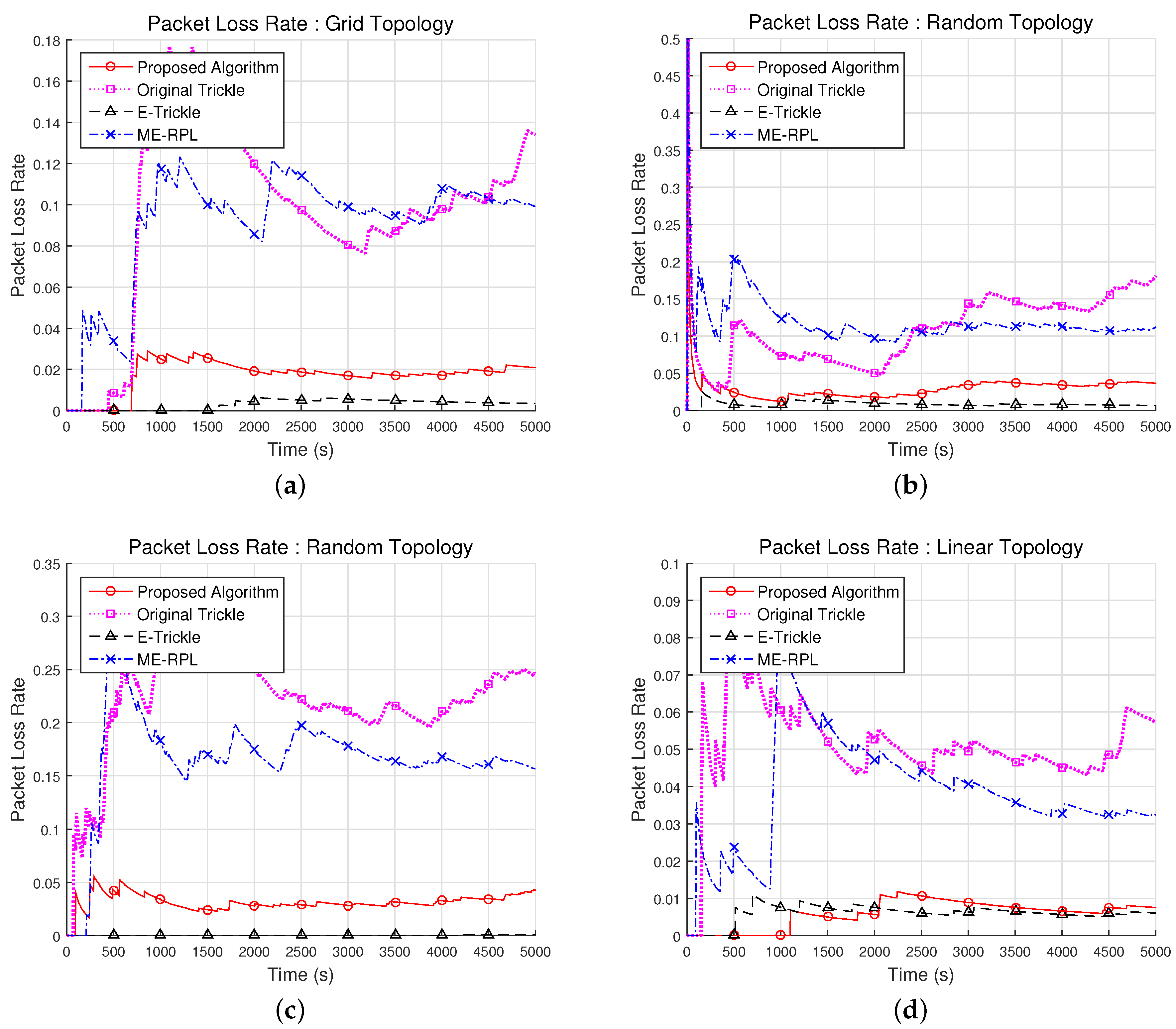
5.2. Packet Loss Rate
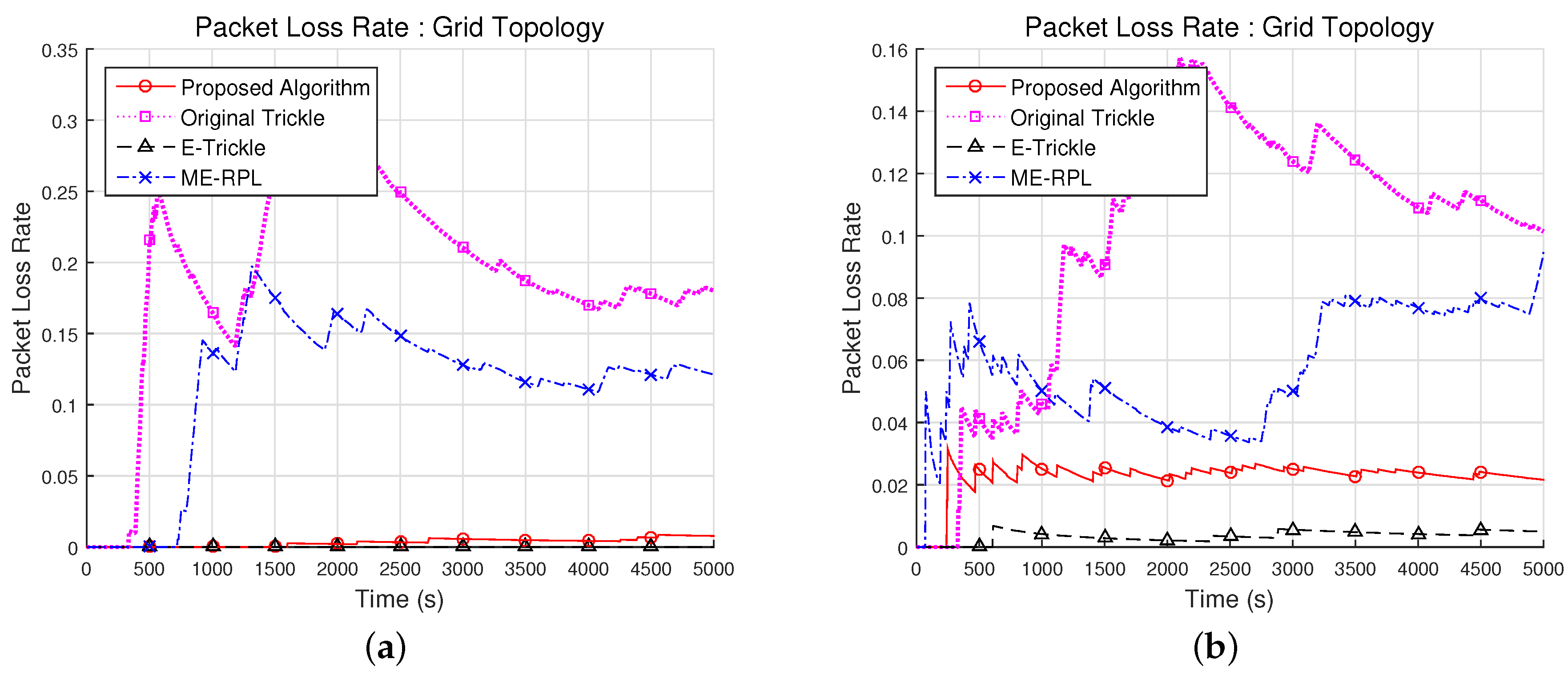
5.2.1. Packet Loss Rate with Different Network Topologies
5.2.2. Packet Loss Rate with Varying Mobile Node Speed
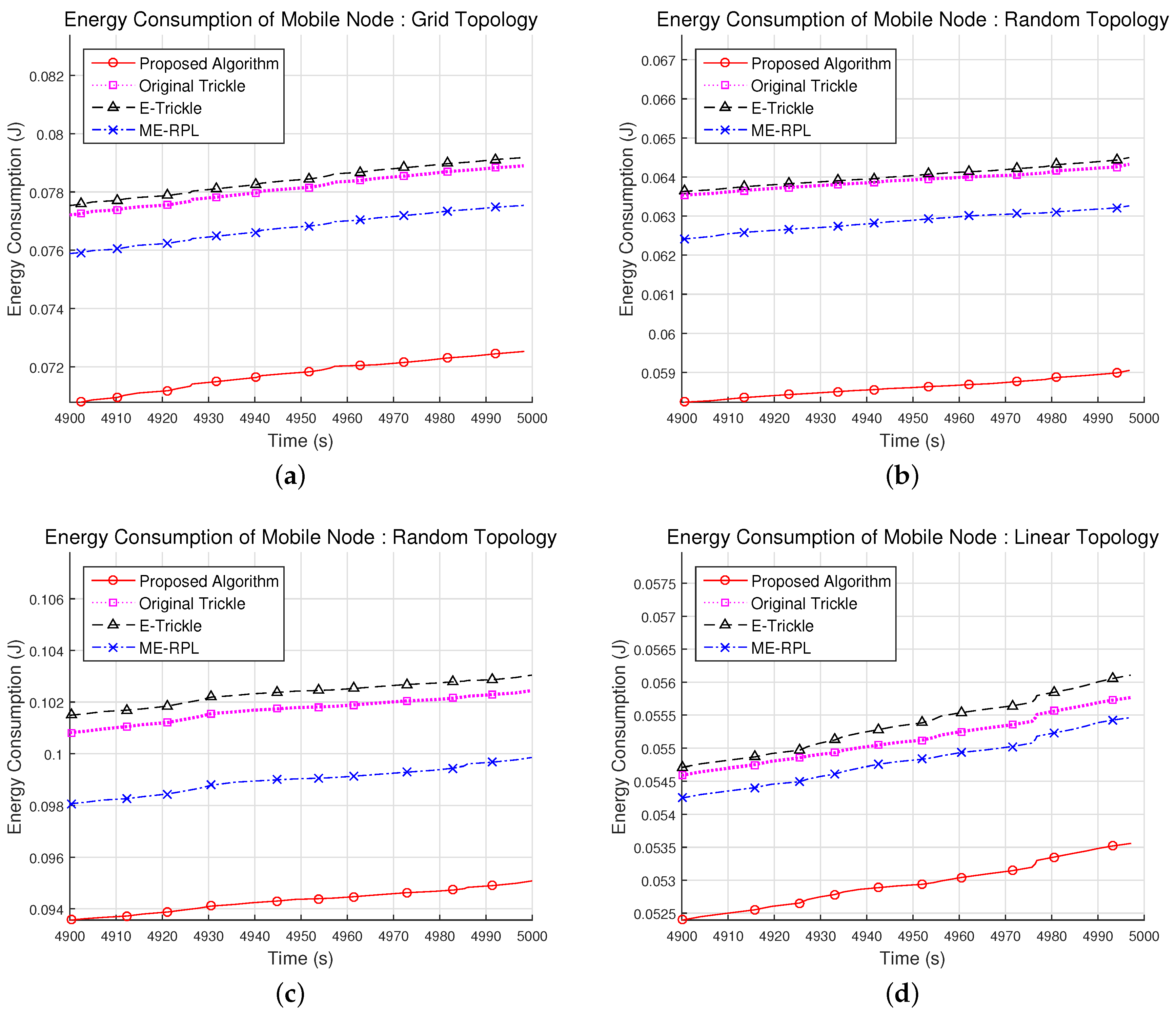
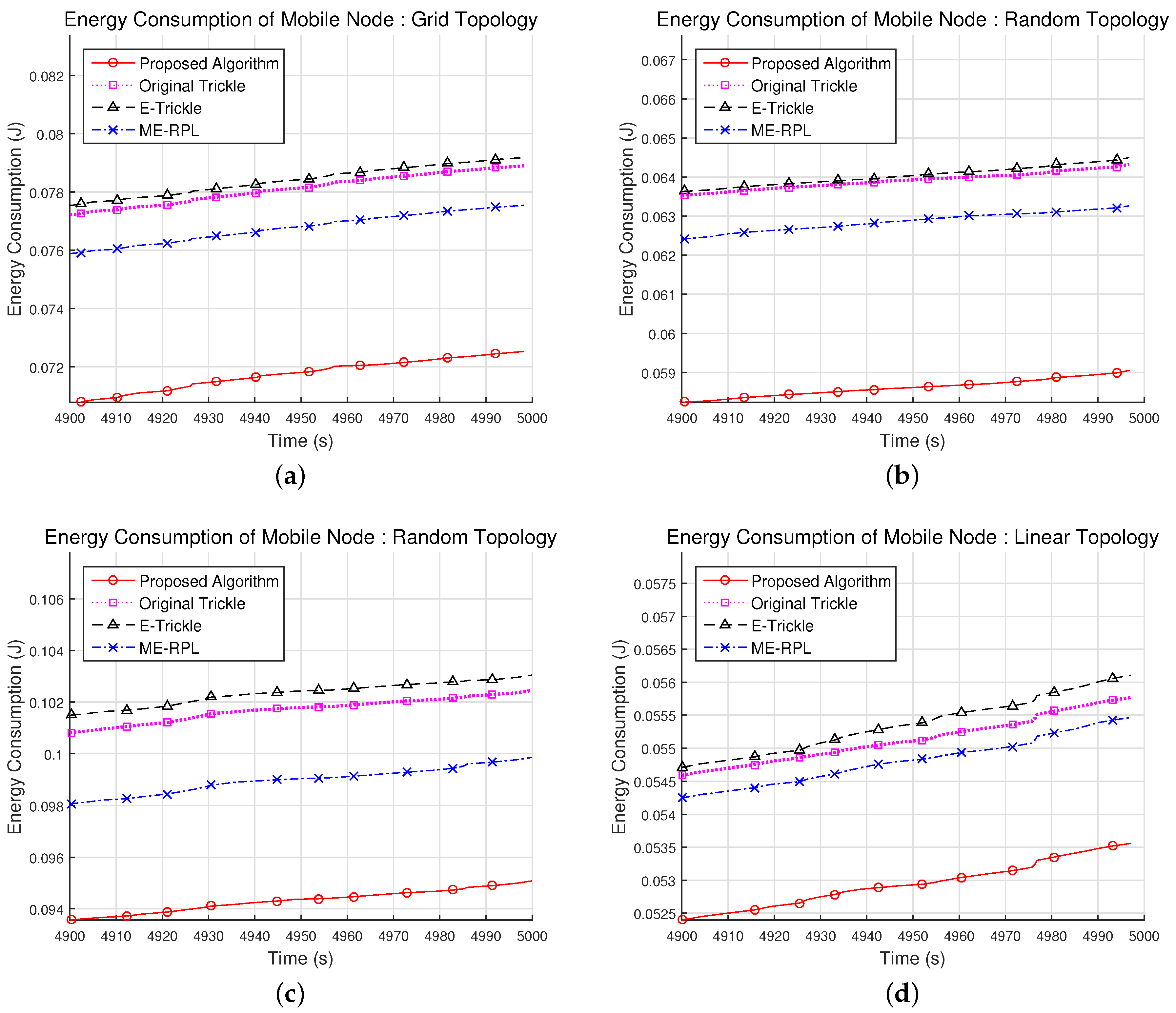
5.3. Energy Consumption of the Mobile Node
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Brandt, A.; Vasseur, J.; Hui, J.; Pister, K.; Thubert, P.; Levis, P.; Struik, R.; Kelsey, R.; Clausen, T.H.; Winter, T. RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks. RFC 6550, Standards Track. 2012. Available online: https://tools.ietf.org/html/rfc6550 (accessed on 17 April 2017).
- Levis, P.; Clausen, T.; Hui, J.; Gnawali, O.; Ko, P.J. The trickle Algorithm. RFC 6206, Standards Track. 2011. Available online: https://tools.ietf.org/html/rfc6206 (accessed on 17 April 2017).
- Oliveira, A.; Vazão, T. Low-power and lossy networks under mobility: A survey. Comput. Netw. 2016, 107, 339–352. [Google Scholar] [CrossRef]
- Carels, D.; Poorter, E.D.; Moerman, I.; Demeester, P. RPL Mobility Support for Point-to-Point Traffic Flows towards Mobile Nodes. Int. J. Distrib. Sens. Netw. 2015, 2015, 111. [Google Scholar] [CrossRef]
- Gaddour, O.; Koubâa, A.; Rangarajan, R.; Cheikhrouhou, O.; Tovar, E.; Abid, M. Co-RPL: RPL routing for mobile low power wireless sensor networks using Corona mechanism. In Proceedings of the 2014 9th IEEE International Symposium on IEEE Industrial Embedded Systems (SIES), Pisa, Italy, 18–20 June 2014; pp. 200–209. [Google Scholar]
- Ghaleb, B.; Al-Dubai, A.; Ekonomou, E. E-trickle: Enhanced trickle Algorithm for Low-Power and Lossy Networks. In Proceedings of the 2015 IEEE International Conference on Computer and Information Technology; Ubiquitous Computing and Communications; Dependable, Autonomic and Secure Computing; Pervasive Intelligence and Computing, Liverpool, UK, 26–28 October 2015; pp. 1123–1129. [Google Scholar]
- Ko, J.; Chang, M. Momoro: Providing mobility support for low-power wireless applications. IEEE Syst. J. 2015, 9, 585–594. [Google Scholar] [CrossRef]
- Cobarzan, C.; Montavont, J.; Noel, T. Analysis and performance evaluation of RPL under mobility. In Proceedings of the 2014 IEEE Symposium on IEEE Computers and Communication (ISCC), Madeira, Portugal, 23–26 June 2014; pp. 1–6. [Google Scholar]
- Lee, K.C.; Sudhaakar, R.; Dai, L.; Addepalli, S.; Gerla, M. RPL under mobility. In Proceedings of the 2012 IEEE Consumer Communications and Networking Conference (CCNC), Planet Holllywood, NV, USA, 14–17 January 2012; pp. 300–304. [Google Scholar]
- Korbi, I.E.; Brahim, M.B.; Adjih, C.; Saidane, L.A. Mobility Enhanced RPL for Wireless Sensor Networks. In Proceedings of the 2012 Third International Conference Network of the Future (NOF), Gammarth, Tunisia, 21–23 November 2012; pp. 1–8. [Google Scholar]
- Fotouhi, H.; Moreira, D.; Alves, M. mRPL: Boosting mobility in the Internet of Things. Ad Hoc Netw. 2015, 26, 17–35. [Google Scholar] [CrossRef]
- Sneha, K.; Prasad, B.G. Comparative study of mobility support techniques for IPv6 based RPL. Int. J. Sci. Eng. Res. 2016, 7, 483–491. [Google Scholar]
- Kusy, B.; Ledeczi, A.; Koutsoukos, X. Tracking mobile nodes using rf doppler shifts. In Proceedings of the 5th International Conference on Embedded Networked Sensor Systems; ACM: New York, NY, USA, 2007; pp. 29–42. [Google Scholar]
- Amundson, I.; Koutsoukos, X.; Sallai, J. Mobile sensor localization and navigation using RF doppler shifts. In Proceedings of the First ACM International Workshop on Mobile Entity Localization and Tracking in GPS-Less Environments; ACM: New York, NY, USA, 2008; pp. 97–102. [Google Scholar]
- Sallai, J.; Volgyesi, P.; Ledeczi, A. Radio interferometric Quasi Doppler bearing estimation. In Proceedings of the 2009 International Conference on Information Processing in Sensor Networks, San Francisco, CA, USA, 13–16 April 2009; pp. 325–336, ID: 1. [Google Scholar]
- Kusý, B.; Amundson, I.; Sallai, J.; Völgyesi, P.; Lédeczi, A.; Koutsoukos, X. RF doppler shift-based mobile sensor tracking and navigation. ACM Trans. Sens. Netw. 2010, 7, 1. [Google Scholar] [CrossRef]
- Brooker, G. Sensors and Signals; University of Sydney: Sydney, Australia, 2006; pp. 448–451. [Google Scholar]
- Pathak, O.; Palaskar, P.; Palkar, R.; Tawari, M. Wi-Fi Indoor Positioning System Based on RSSI Measurements from Wi-Fi Access Points—A Trilateration Approach. Int. J. Sci. Eng. Res. 2014, 5, 1234–1238. [Google Scholar]
- Lassabe, F.; Canalda, P.; Chatonnay, P.; Spies, F.; Baala, O. A Friis-based calibrated model for WiFi terminals positioning. In Proceedings of the Sixth IEEE International Symposium on a World of Wireless Mobile and Multimedia Networks, Taormina, Italy, 13–16 June 2005; pp. 382–387. [Google Scholar]
- Eltahir, I.K. The Impact of Different Radio Propagation Models for Mobile Ad hoc NETworks (MANET) in Urban Area Environment. In Proceedings of the The 2nd International Conference on Wireless Broadband and Ultra Wideband Communications (AusWireless 2007), Sydney, Australia, 27–30 August 2007; p. 30. [Google Scholar]
- Bettstetter, C.; Resta, G.; Santi, P. The node distribution of the random waypoint mobility model for wireless ad hoc networks. IEEE Trans. Mob. Comput. 2003, 2, 257–269. [Google Scholar] [CrossRef]
- Contiki: The Open Source Operating System for the Internet of Things. Available online: http://www.contiki-os.org/ (accessed on 20 December 2016).
- Parameswaran, A.T.; Husain, M.I.; Upadhyaya, S. Is RSSI a reliable parameter in sensor localization algorithms: An experimental study. In Proceedings of the IEEE Field Failure Data Analysis Workshop (F2DA09), New York, NY, USA, 27–30 September 2009; Volume 5. [Google Scholar]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 4–7 January 2000; Volume 2, p. 10. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Definition |
|---|---|
| Area | 100 m × 100 m, 100 m × 40 m |
| Simulation time | 5000 s |
| # of router nodes | 6 (linear), 36 (grid, random), 72 (random) |
| Transmission range | 20 m |
| 16 m | |
| Mobility model | Random waypoint model |
| Mobile node speed | 1.25 m/s∼2.5 m/s |
| 50 nJ/bit | |
| 10 pJ/bit/m | |
| 0.0013 pJ/bit/m |
| Parameters | Definition |
|---|---|
| E | Total energy consumption when m bits packet delivered from source to destination |
| Energy dissipation of the encoding and decoding | |
| Parameters of transmitter amplifier |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Kim, K.-H.; Kim, K. An Algorithm for Timely Transmission of Solicitation Messages in RPL for Energy-Efficient Node Mobility. Sensors 2017, 17, 899. https://doi.org/10.3390/s17040899
Park J, Kim K-H, Kim K. An Algorithm for Timely Transmission of Solicitation Messages in RPL for Energy-Efficient Node Mobility. Sensors. 2017; 17(4):899. https://doi.org/10.3390/s17040899
Chicago/Turabian StylePark, Jihong, Ki-Hyung Kim, and Kangseok Kim. 2017. "An Algorithm for Timely Transmission of Solicitation Messages in RPL for Energy-Efficient Node Mobility" Sensors 17, no. 4: 899. https://doi.org/10.3390/s17040899
APA StylePark, J., Kim, K.-H., & Kim, K. (2017). An Algorithm for Timely Transmission of Solicitation Messages in RPL for Energy-Efficient Node Mobility. Sensors, 17(4), 899. https://doi.org/10.3390/s17040899