Strong Tracking Spherical Simplex-Radial Cubature Kalman Filter for Maneuvering Target Tracking


Abstract
:1. Introduction
2. A Review of UKF and CKF
3. Strong Tracking Spherical Simplex-Radial Cubature Kalman Filter
3.1. Review of the Third-Degree Spherical Simplex-Radial Cubature Rule
3.1.1. Spherical Simplex Rule
3.1.2. Radial Rule
3.1.3. Spherical Simplex-Radial Rule
3.2. Strong Tracking Filter
3.3. Equivalent Expression of the Fading Factor
3.4. Steps of the STSSRCKF
4. Simulation and Results
4.1. Tracking Model and Measurement Model
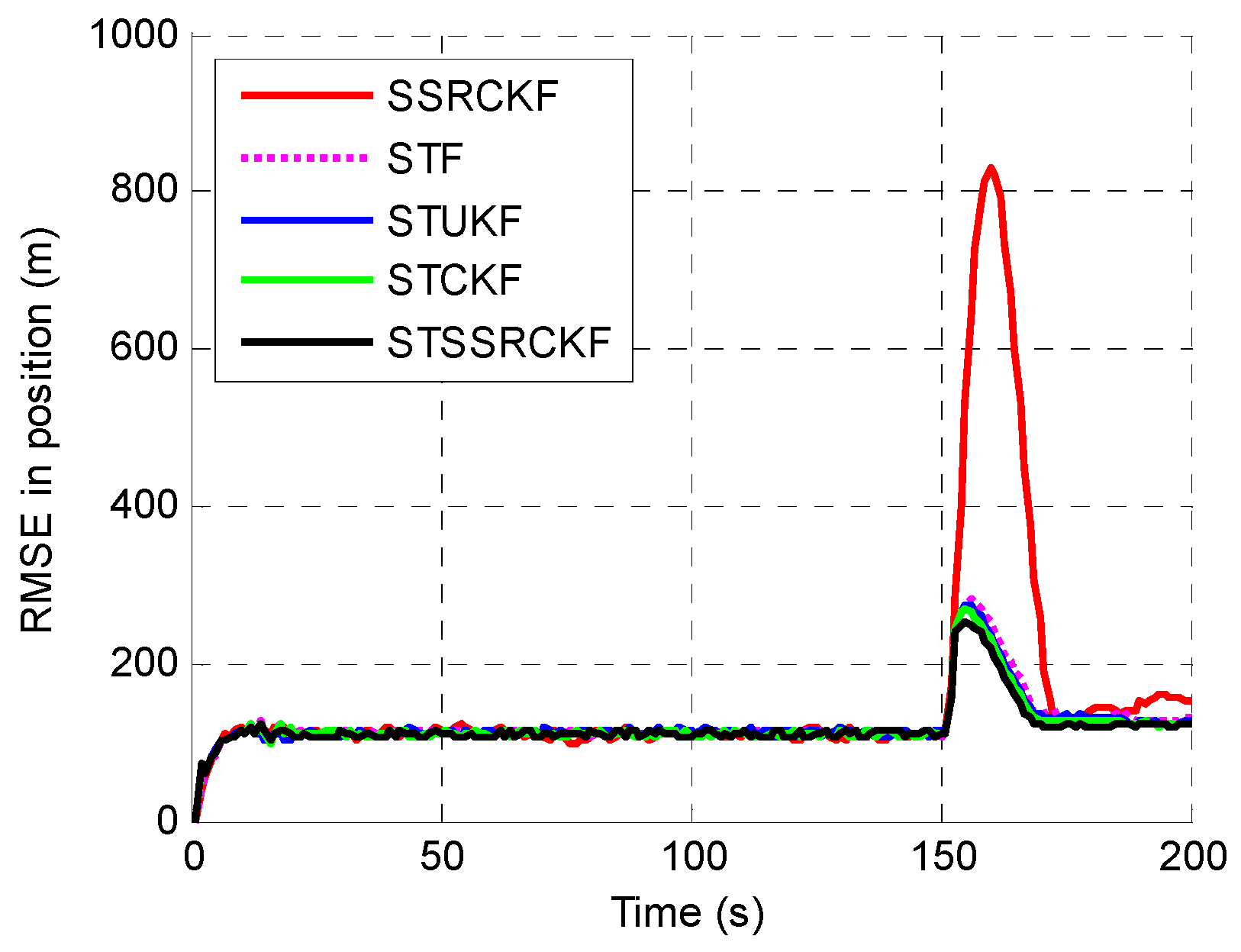
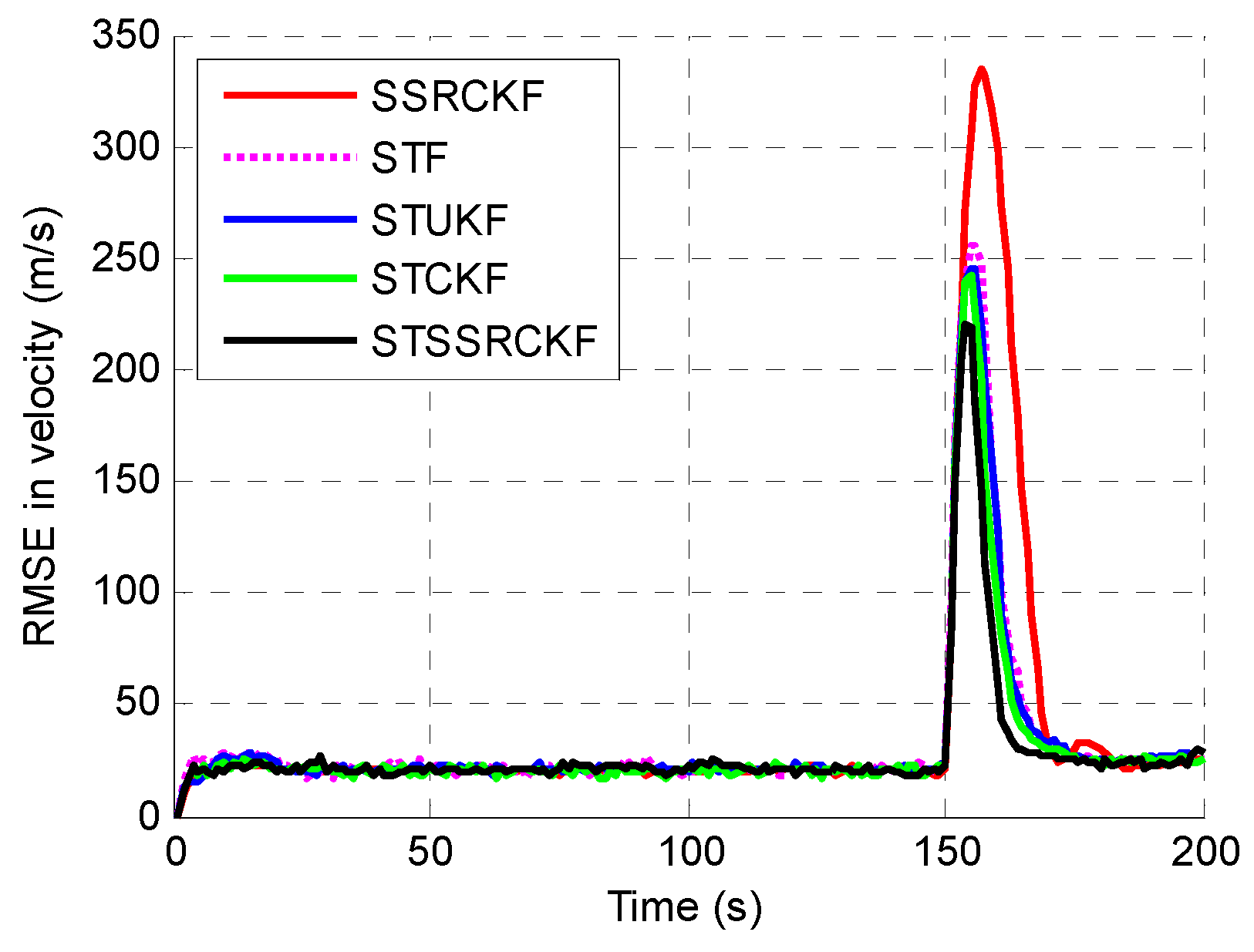
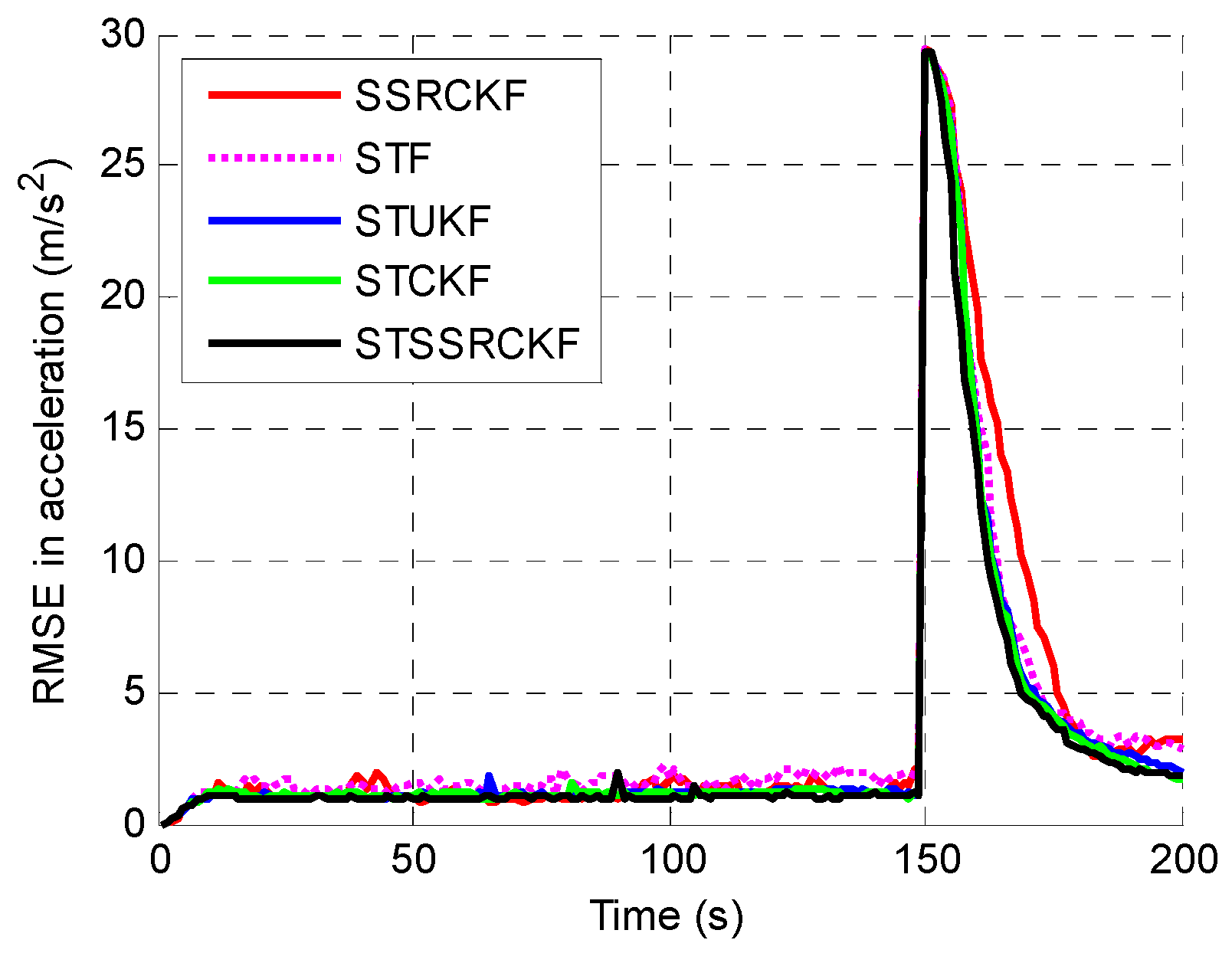
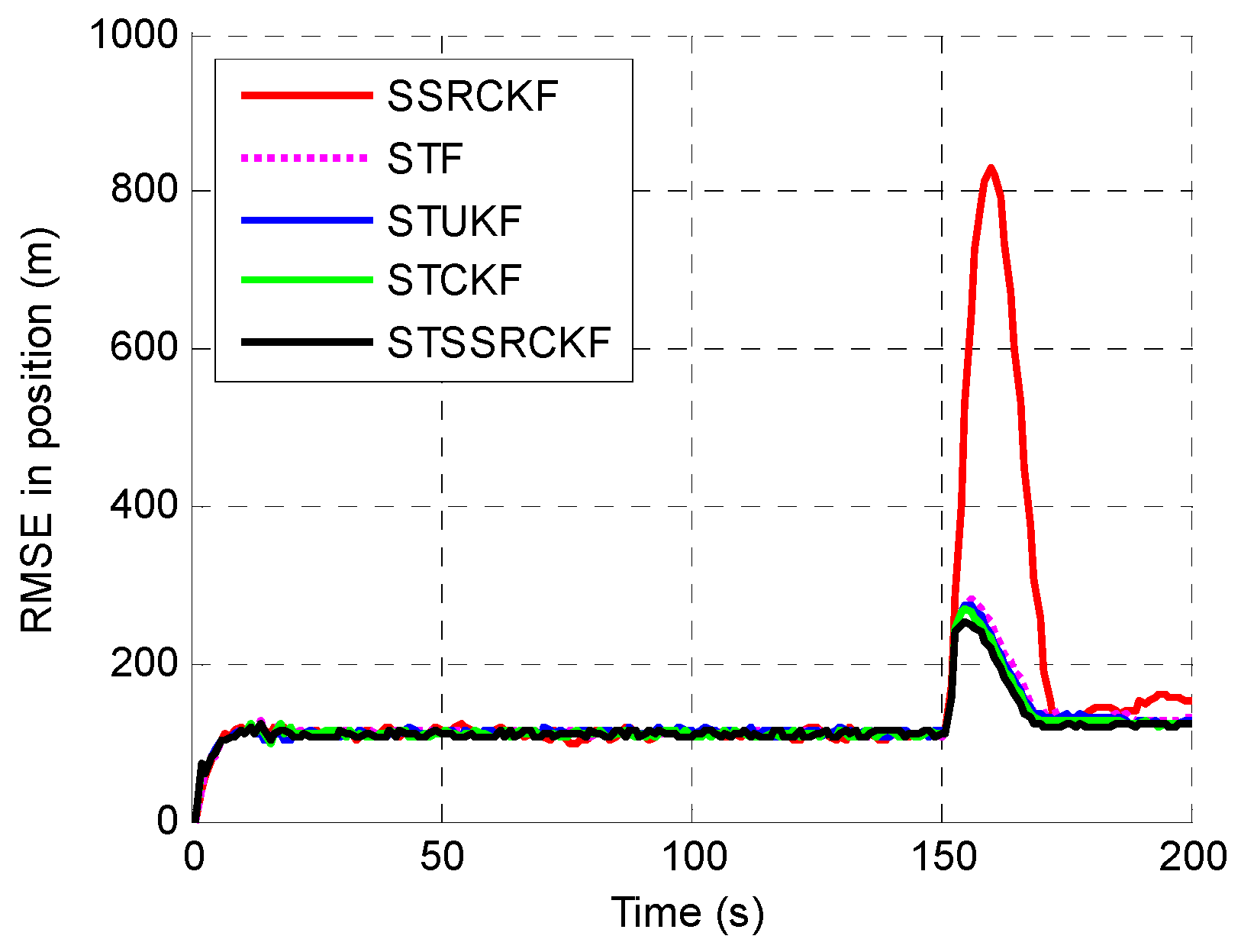
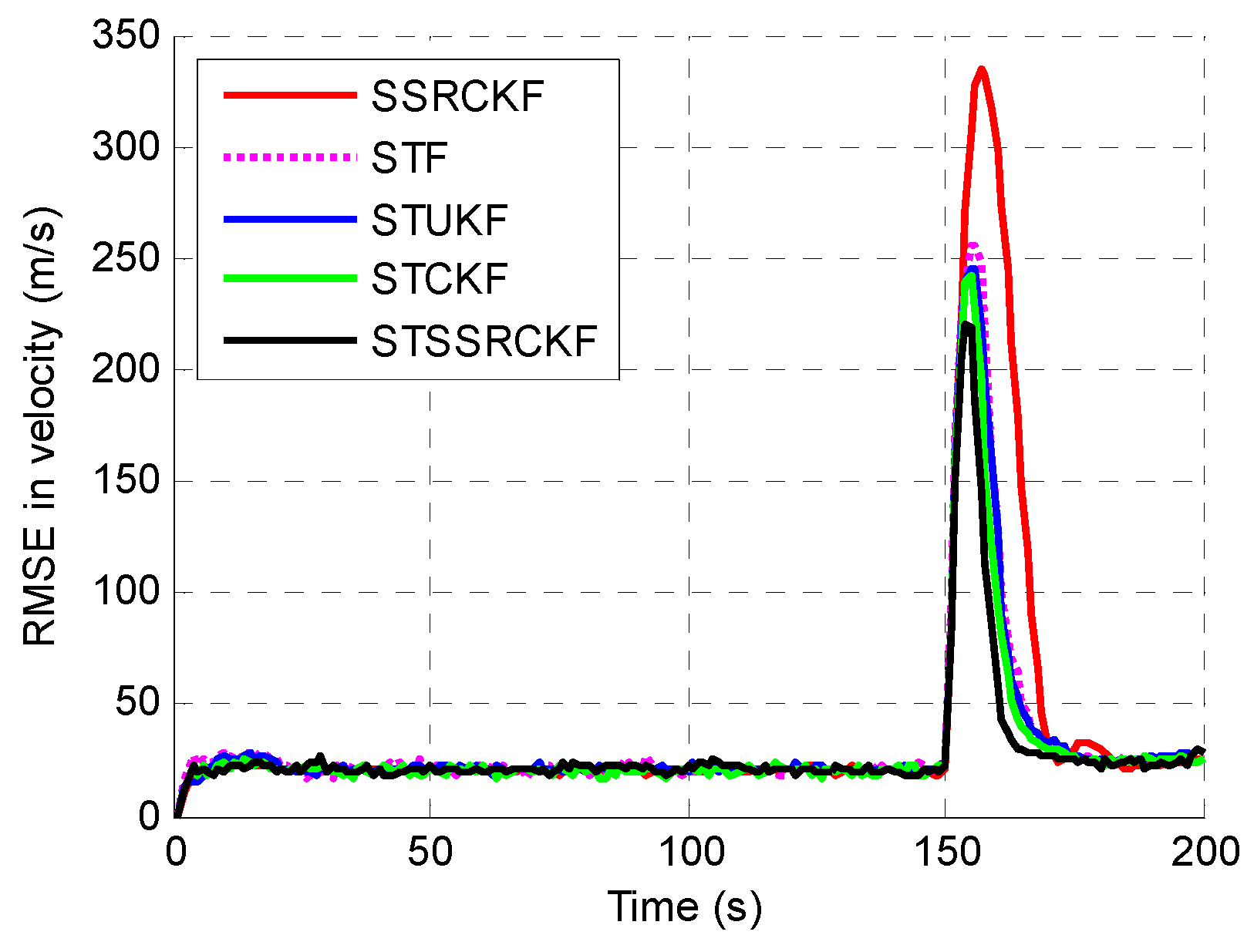
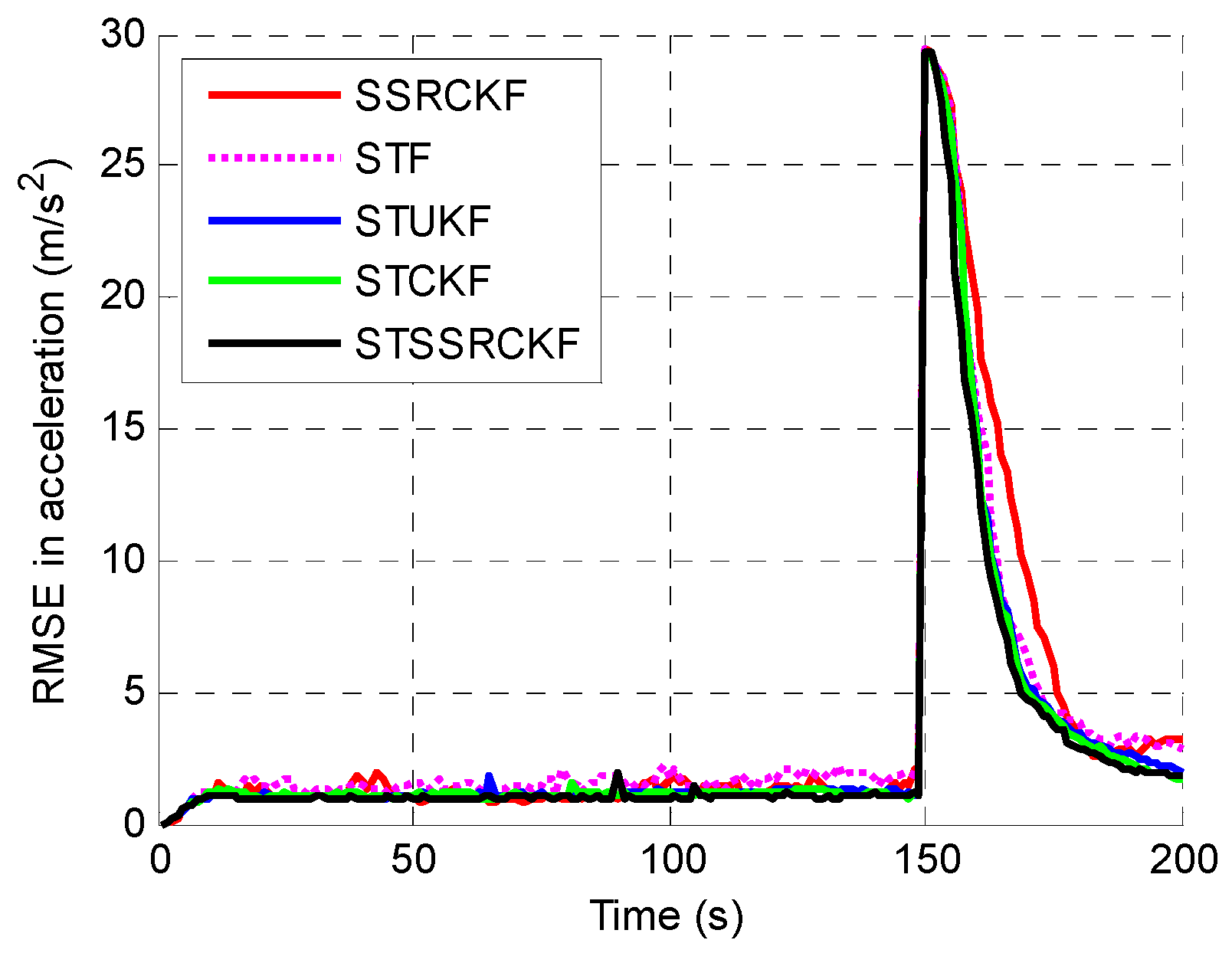
4.2. Simulation of the STSSRCKF
- Case 1:
- Simulation of medium maneuvering target tacking. The target moves with initial acceleration until . Then, it maneuvers with acceleration of up to end of this simulation at .
- Case 2:
- Simulation of weak maneuvering target tracking. The initial position, velocity and acceleration of the target are the same as those in Case1. The target also moves with initial acceleration until . Then, it maneuvers with acceleration of up to end of this simulation at .
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Yepes, J.L.; Hwang, I.; Rotea, M. New algorithms for aircraft intent inference and trajectory prediction. J. Guid. Control Dyn. 2007, 30, 370–382. [Google Scholar] [CrossRef]
- Liu, Z.X.; Zhang, Q.Q.; Li, L.Q.; Xie, W.X. Tracking multiple maneuvering targets using a sequential multiple target Bayes filter with jump Markov system models. Neurocomputing 2016, 216, 183–191. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part V: Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar]
- Kazimierski, W.; Stateczny, A. Optimization of multiple model neural tracking filter for marine targets. In Proceedings of the 13th International Radar Symposium (IRS), Warsaw, Poland, 23–25 May 2012; pp. 543–548. [Google Scholar]
- Zhou, H.R.; Kumar, K.S.P. A “Current” Statistical Model and Adaptive Algorithm for Estimating Maneuvering Targets. AIAA J. Guid. 1984, 7, 596–602. [Google Scholar]
- Bingbing Jiang, W.S. Range tracking method based on adaptive“current” statistical model with velocity prediction. Signal Process. 2017, 261–270. [Google Scholar] [CrossRef]
- Zhou, D.H.; Frank, P.M. Strong tracking filtering of nonlinear time varying stochastic systems with coloured noise application to parameter estimation and empirical robustness analysis. Int. J. Control 1996, 65, 295–307. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. A Survey of Maneuvering Target Tracking—Part IV: Decision-Based Methods. In Proceedings of the SPIE Conference on Signal and Data Processing of Small Targets 2002, Orlando, FL, USA, 15 April 2002; pp. 4728–4760. [Google Scholar]
- Schmidt, S.F. The Kalman filter—Its recognition and development for aerospace applications. J. Guid. Control Dyn. 1981, 4, 4–7. [Google Scholar] [CrossRef]
- Djuric, P.M.; Kotecha, J.H.; Zhang, J.Q.; Huang, Y.F.; Ghirmai, T.; Bugallo, M.F.; Miguez, J. Particle filtering. IEEE Signal. Proc. Mag. 2003, 20, 19–38. [Google Scholar] [CrossRef]
- Doucet, A.; Johansen, A.M. A Tutorial on Particle Filtering and Smoothing: Fifteen Years Later. Available online: http://automatica.dei.unipd.it/tl_files/utenti/lucaschenato/Classes/PSC10_11/Tutorial_PF_doucet_johansen.pdf (accessed on 31 March 2017).
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative parallel particle filters for online model selection and applications to urban mobility. Digit. Signal. Process. 2017, 60, 172–185. [Google Scholar] [CrossRef]
- Kotecha, J.H.; Djuric, P.A. Gaussian particle filtering. IEEE Trans. Signal. Process. 2003, 51, 2592–2601. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Elliott, R.J. Discrete-time nonlinear filtering algorithms using Gauss-Hermite quadrature. Proc. IEEE 2007, 95, 953–977. [Google Scholar] [CrossRef]
- Sadhu, S.; Srinivasan, M.; Bhaumik, S.; Ghoshal, I.K. Central difference formulation of risk-sensitive filter. IEEE Signal. Process. Lett. 2007, 14, 421–424. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman smoothers. Automatica 2011, 47, 2245–2250. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. High-degree cubature Kalman filter. Automatica 2013, 49, 510–518. [Google Scholar] [CrossRef]
- Wang, S.Y.; Feng, J.C.; Tse, C.K. Spherical Simplex-Radial Cubature Kalman Filter. IEEE Signal Process. Lett. 2014, 21, 43–46. [Google Scholar] [CrossRef]
- Wang, L.J.; Wu, L.F.; Guan, Y.; Wang, G.H. Online Sensor Fault Detection Based on an Improved Strong Tracking Filter. Sensors 2015, 15, 4578–4591. [Google Scholar] [CrossRef] [PubMed]
- Ge, Q.B.; Shao, T.; Wen, C.L.; Sun, R.Y. Analysis on Strong Tracking Filtering for Linear Dynamic Systems. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Li, D.; Ouyang, J.; Li, H.Q.; Wan, J.F. State of charge estimation for LiMn2O4 power battery based on strong tracking sigma point Kalman filter. J. Power Sources 2015, 279, 439–449. [Google Scholar] [CrossRef]
- Gao, M.; Zhang, H.; Zhou, Y.L.; Zhang, B.Q. Ground maneuvering target tracking based on the strong tracking and the cubature Kalman filter algorithms. J. Electron. Imaging 2016, 25, 023006. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M. Multiple sensor estimation using a new fifth-degree cubature information filter. Trans. Inst. Meas. Control. 2015, 37, 15–24. [Google Scholar] [CrossRef]
- Jwo, D.J.; Wang, S.H. Adaptive fuzzy strong tracking extended kalman filtering for GPS navigation. IEEE Sens. J. 2007, 7, 778–789. [Google Scholar] [CrossRef]
- Jwo, D.J.; Yang, C.F.; Chuang, C.H.; Lee, T.Y. Performance enhancement for ultra-tight GPS/INS integration using a fuzzy adaptive strong tracking unscented Kalman filter. Nonlinear Dyn. 2013, 73, 377–395. [Google Scholar] [CrossRef]
- Han, P.; Mu, R.; Cui, N. Effective fault diagnosis based on strong tracking UKF. Aircr. Eng. Aerosp. Technol. 2011, 83, 275–282. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Filters | Position ARMSE/m | Velocity ARMSE/(m/s) | Acceleration ARMSE/(m/s2) |
|---|---|---|---|
| SSRCKF | 152.1 | 31.2 | 6.9 |
| STF | 129.7 | 28.4 | 6.2 |
| STUKF | 124.5 | 27.5 | 5.9 |
| STCKF | 123.1 | 26.7 | 5.8 |
| STSSRCKF | 119.3 | 25.1 | 5.6 |
| Filters | Computational Complexity | Computational Time (s) |
|---|---|---|
| SSRCKF | O{(2n + 2)3} | 0.07 |
| STF | O{(n)2} | 0.02 |
| STUKF | O{(2n + 1)3} | 0.14 |
| STCKF | O{(2n)3} | 0.14 |
| STSSRCKF | O{(2n + 2)3} | 0.15 |
| Simulation | Filters | Position ARMSE/m | Velocity ARMSE/(m/s) | Acceleration ARMSE/(m/s2) |
|---|---|---|---|---|
| Case 1 | SSRCKF | 101.6 | 21.2 | 5 |
| STF | 95.3 | 20.2 | 4.5 | |
| STUKF | 88.5 | 16.4 | 4.1 | |
| STCKF | 87.4 | 16.8 | 4.1 | |
| STSSRCKF | 81.1 | 15.9 | 3.7 | |
| Case 2 | SSRCKF | 50.5 | 8.2 | 1.8 |
| STF | 65.1 | 10.8 | 2.4 | |
| STUKF | 57.3 | 8.8 | 2.2 | |
| STCKF | 56.3 | 8.3 | 2.2 | |
| STSSRCKF | 53.4 | 8.4 | 2.1 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Wu, W. Strong Tracking Spherical Simplex-Radial Cubature Kalman Filter for Maneuvering Target Tracking. Sensors 2017, 17, 741. https://doi.org/10.3390/s17040741
Liu H, Wu W. Strong Tracking Spherical Simplex-Radial Cubature Kalman Filter for Maneuvering Target Tracking. Sensors. 2017; 17(4):741. https://doi.org/10.3390/s17040741
Chicago/Turabian StyleLiu, Hua, and Wen Wu. 2017. "Strong Tracking Spherical Simplex-Radial Cubature Kalman Filter for Maneuvering Target Tracking" Sensors 17, no. 4: 741. https://doi.org/10.3390/s17040741
APA StyleLiu, H., & Wu, W. (2017). Strong Tracking Spherical Simplex-Radial Cubature Kalman Filter for Maneuvering Target Tracking. Sensors, 17(4), 741. https://doi.org/10.3390/s17040741