
Investigation of a Combined Surveying and Scanning Device: The Trimble SX10 Scanning Total Station




Abstract
:1. Introduction
2. Modern Total Stations—State of the Art and Case Studies
2.1. Overview of Image-Assisted and Scanning Total Stations
2.2. Related Work
3. Trimble SX10 Technical Properties
3.1. Overview of Built-In Digital Cameras
3.2. Specifications of SX10 Scanning Modes
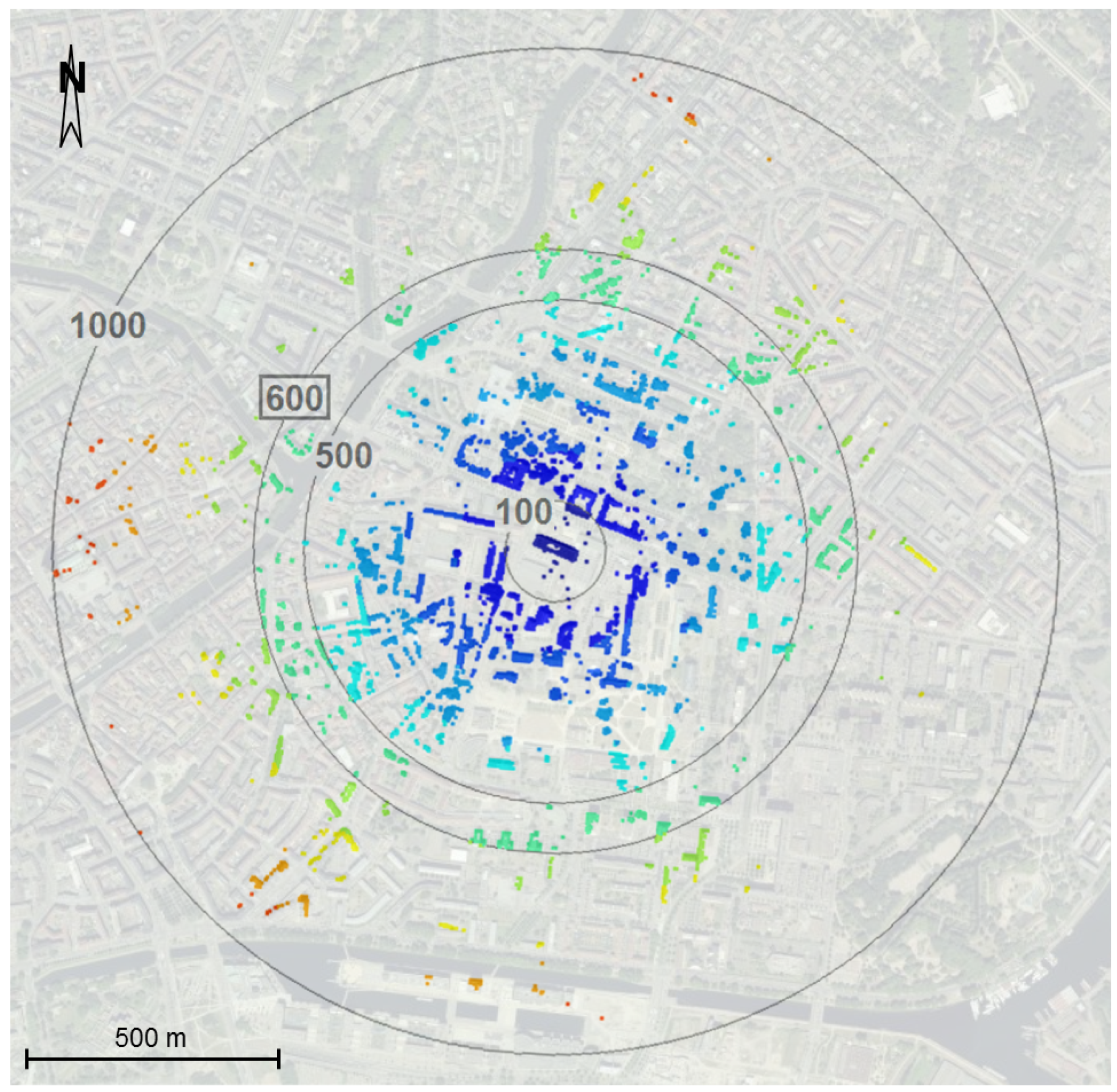
3.3. Practical Investigation of Maximal Measurement Range
4. Investigation of the EDM Unit and General Surveying Functionalities
4.1. Total Station Working Principle
4.2. Geodetic Traverse Survey
5. Assessment of Laser Scanning Projects
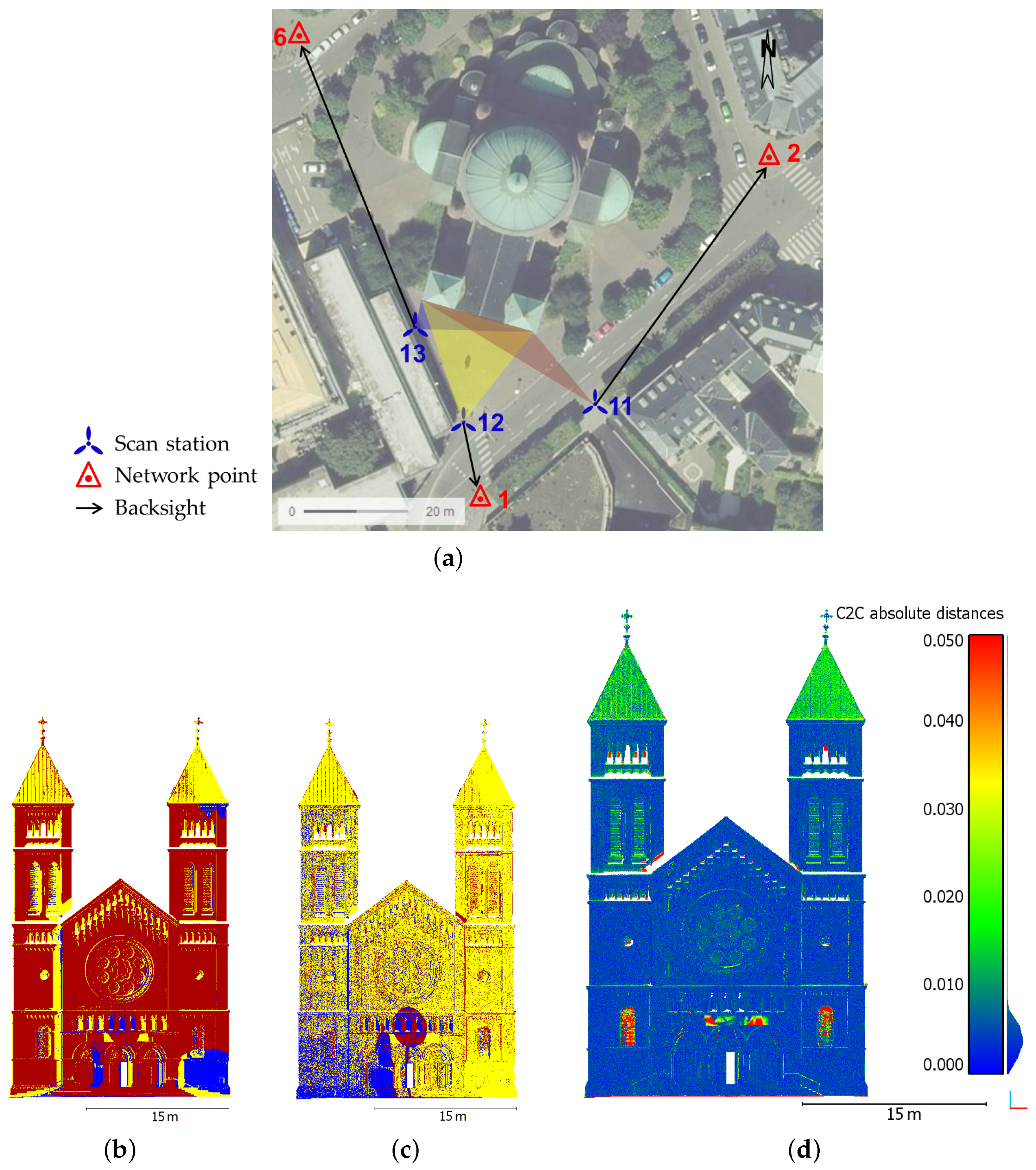
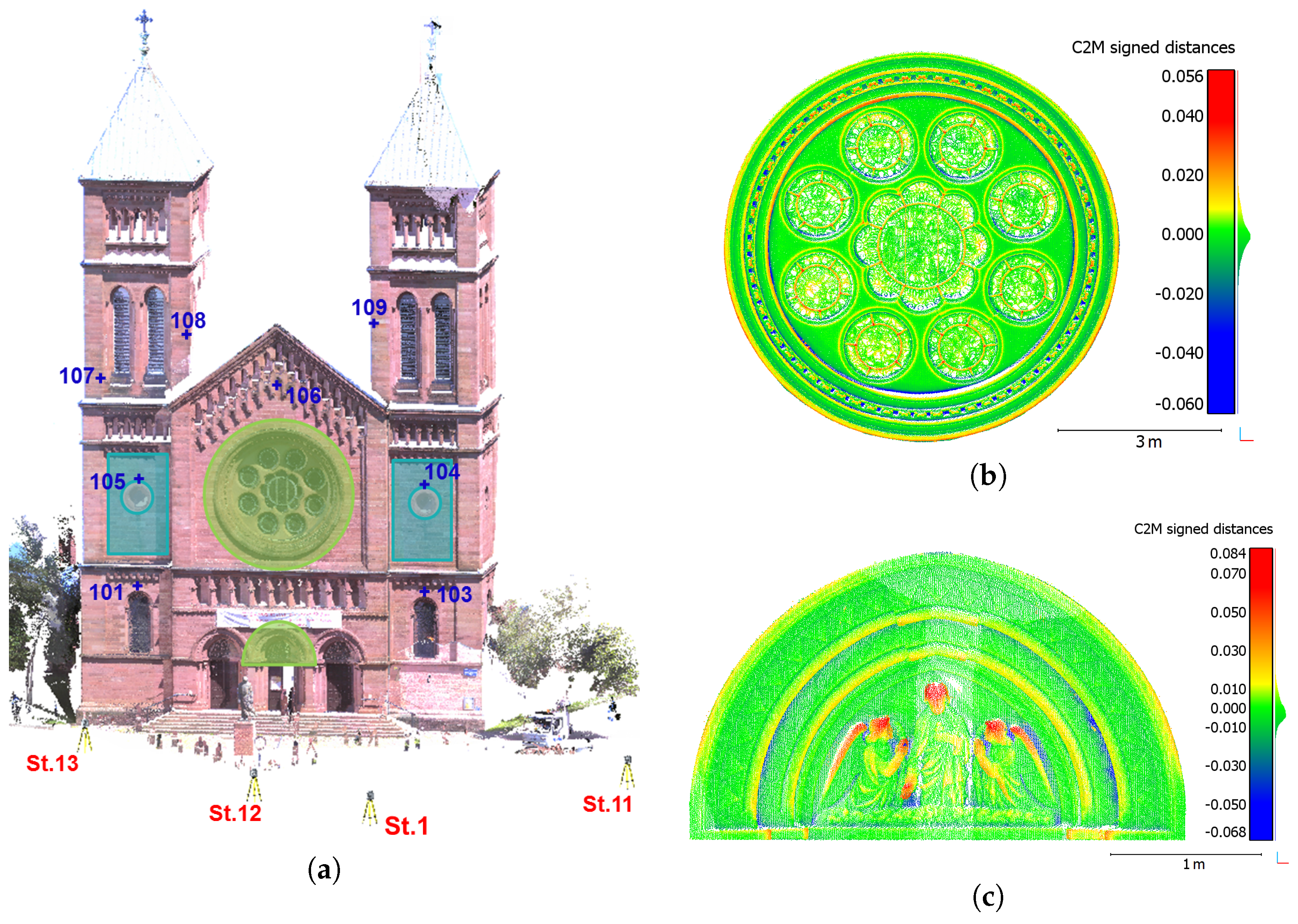
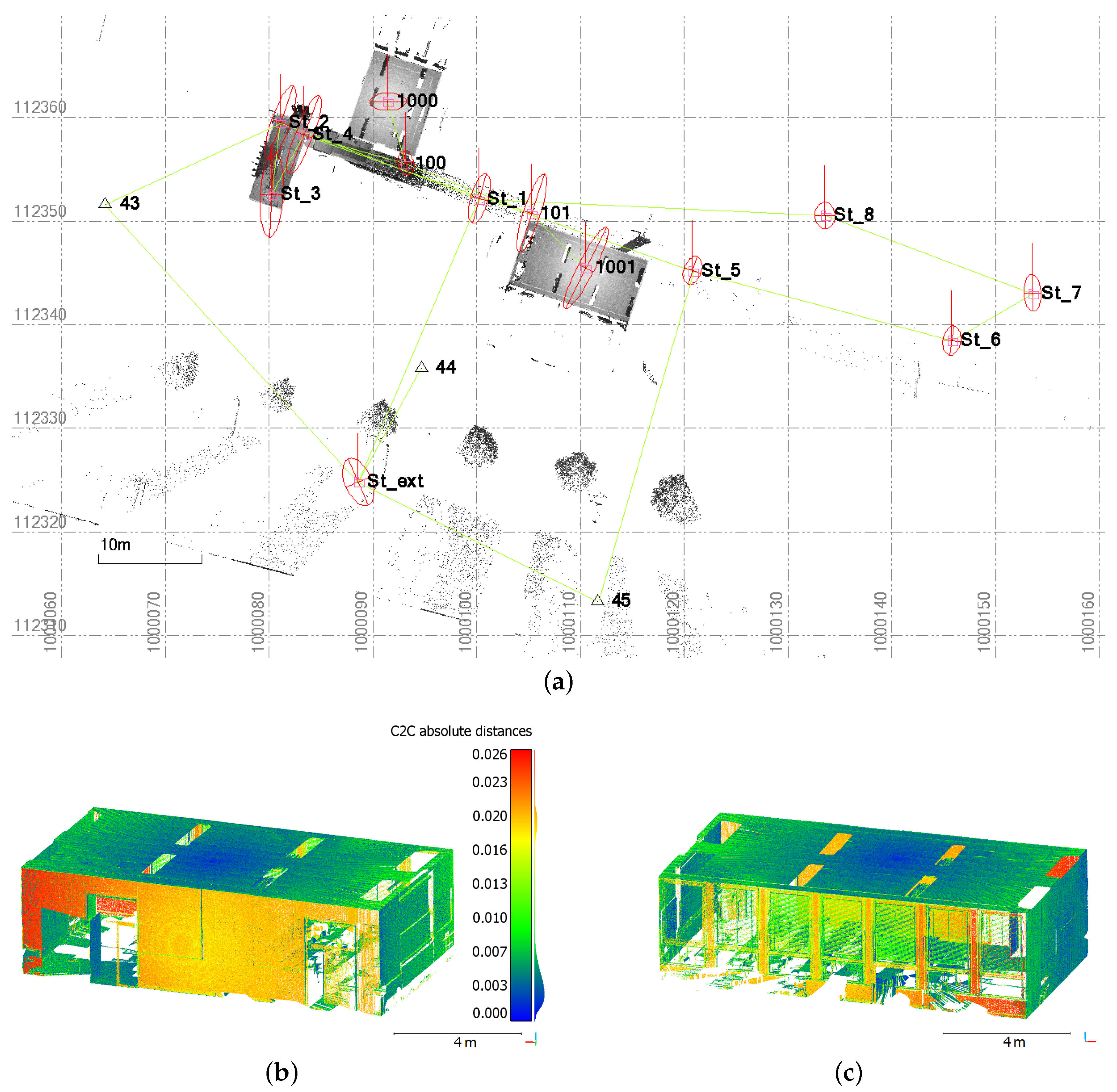
5.1. Investigation of a Building Facade Survey
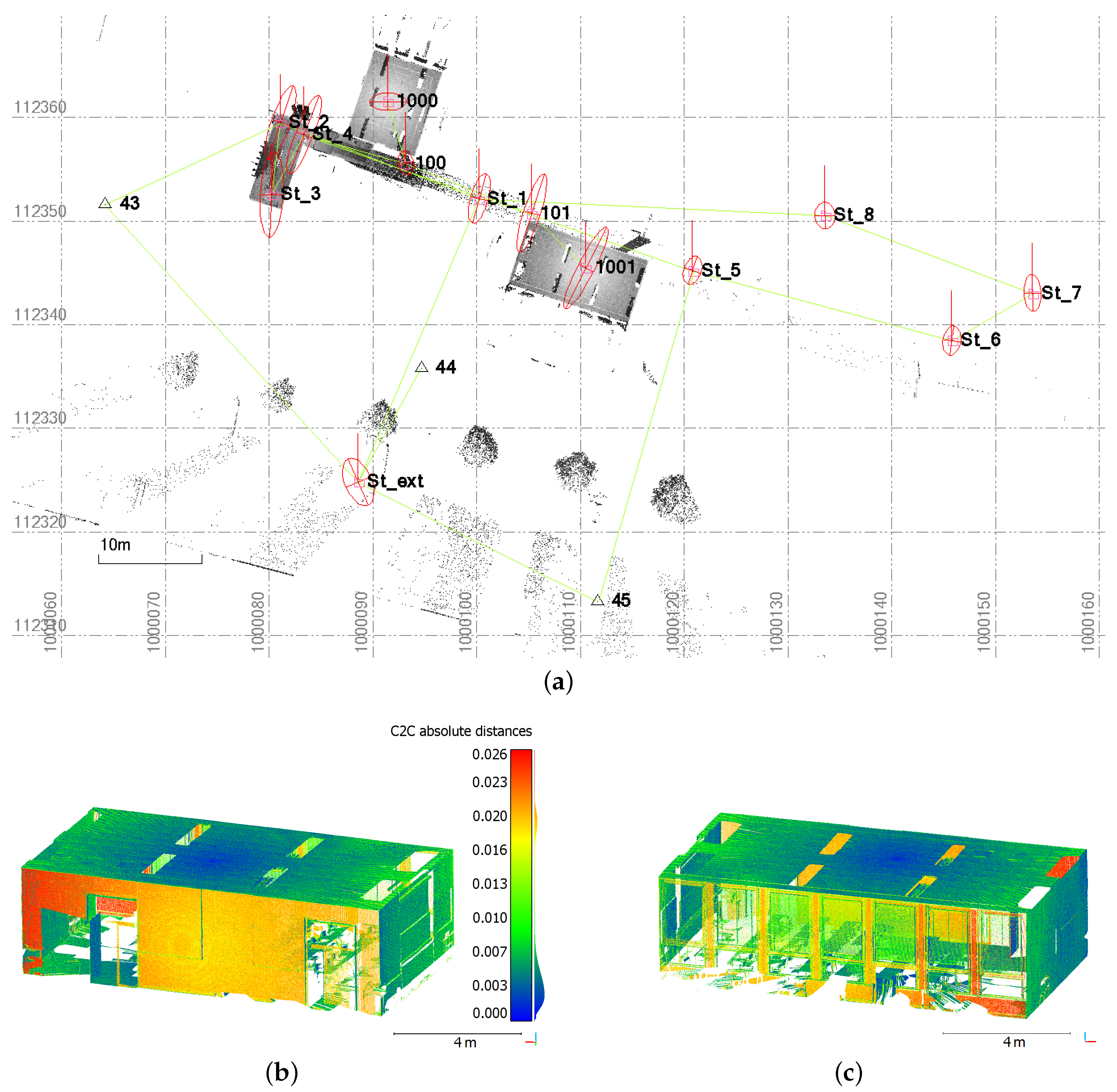
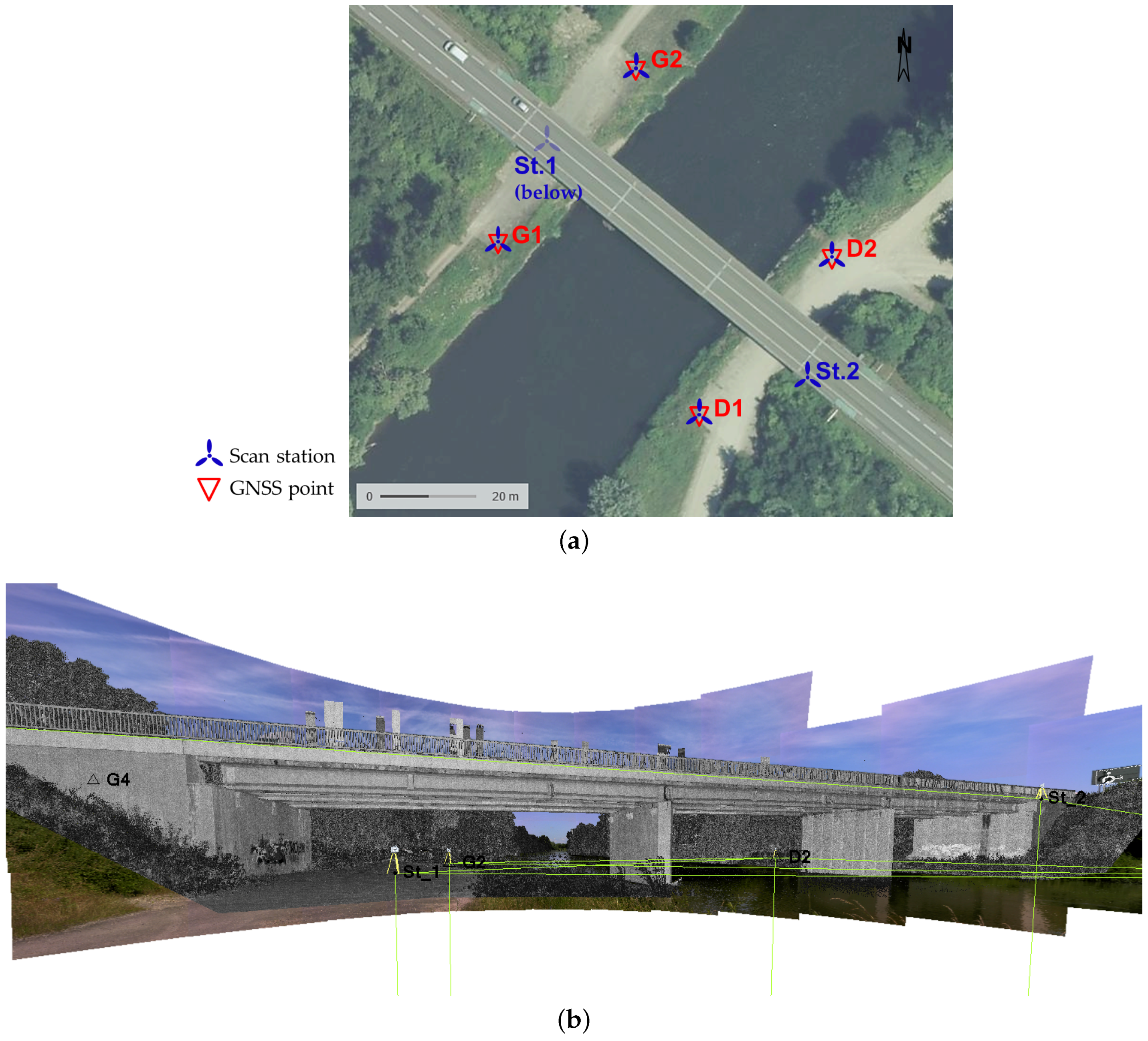
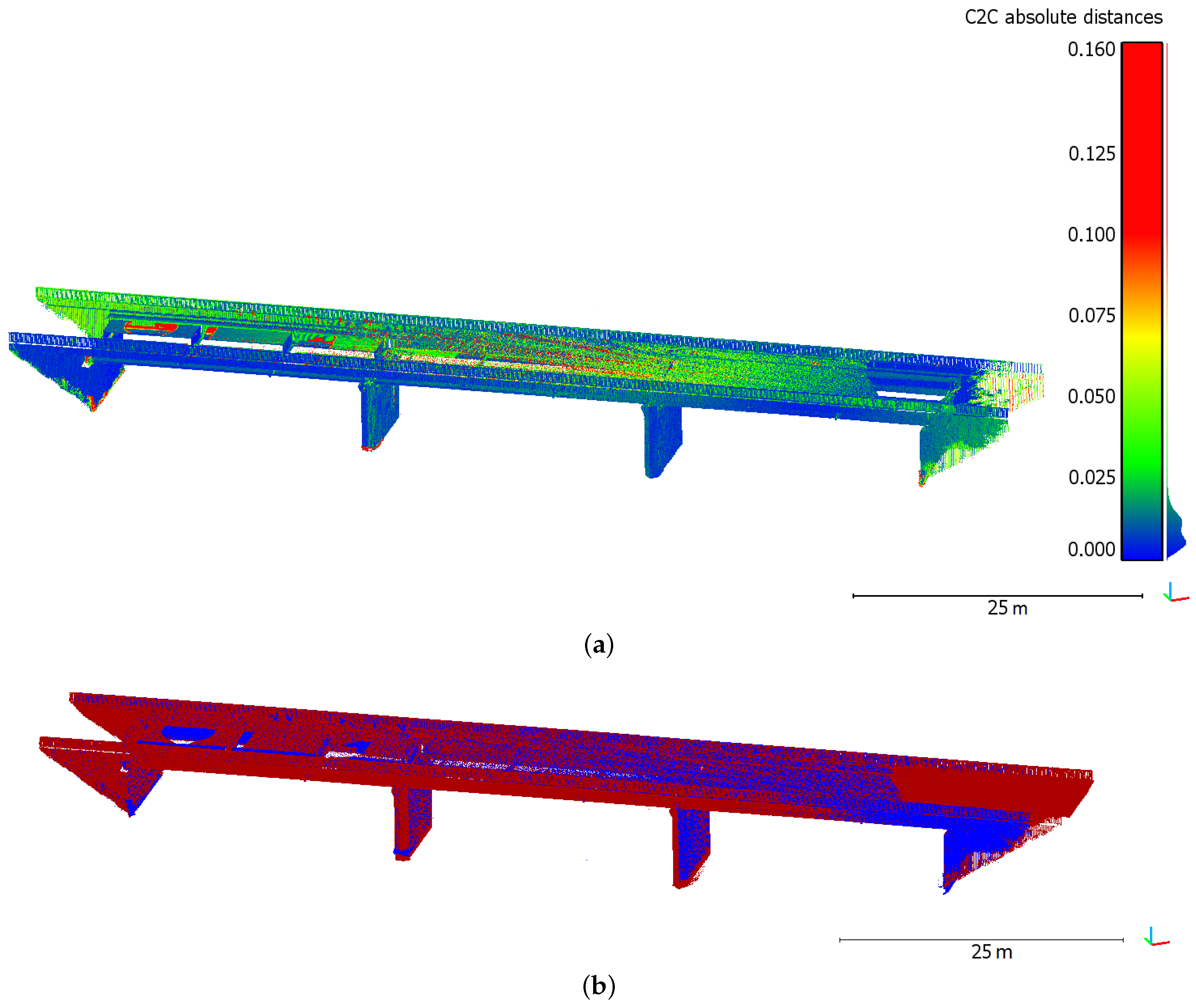
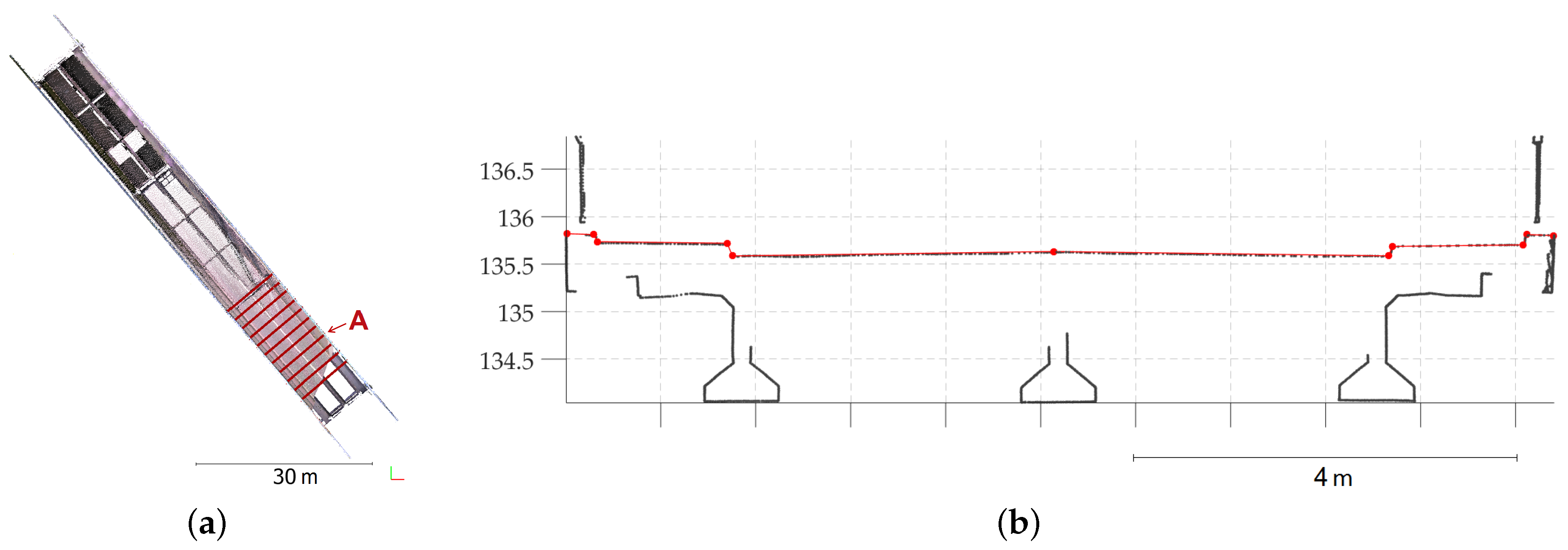
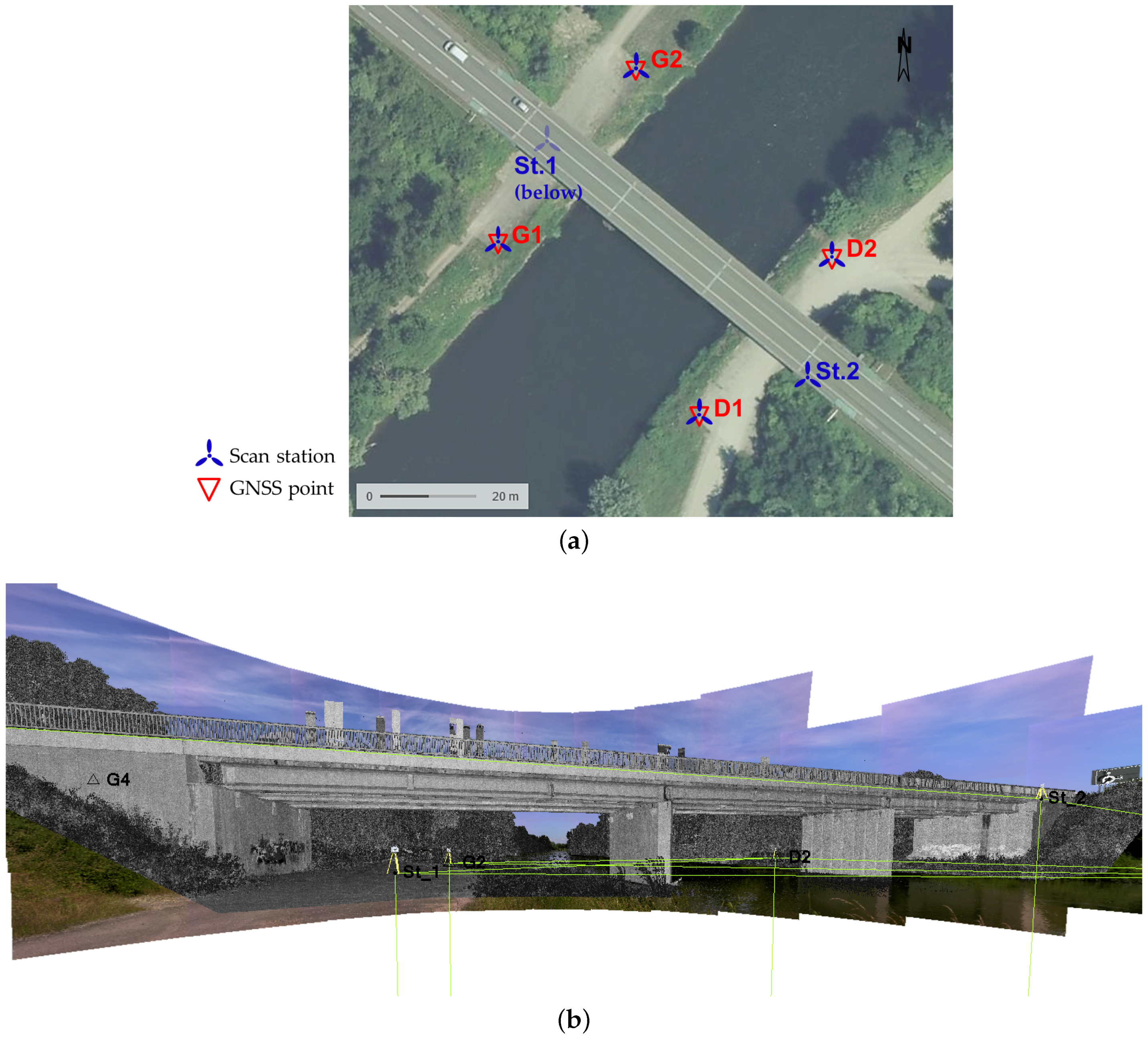
5.2. Assessment of a Directly Georeferenced Project
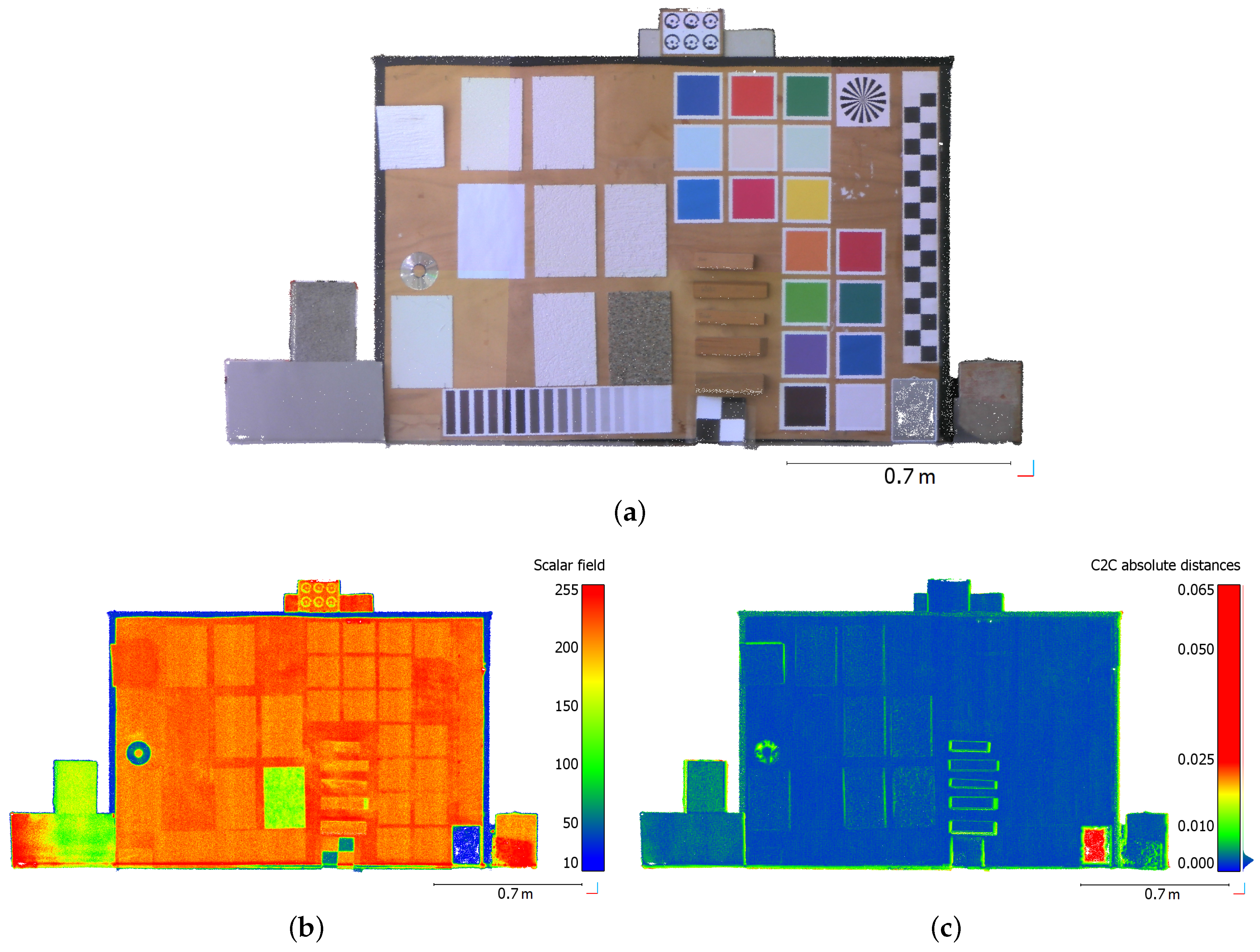
5.3. Uncertainty Analysis Related to Object Color and Materials
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| TLS | Terrestrial Laser Scanner |
| GNSS | Global Navigation Satellite System |
| EDM | Electronic Distance Measurement |
| IATS | Image-Assisted Total Station |
| COGO | Coordinate Geometry |
| TBC | Trimble Business Center |
| ICP | Iterative Closest Point |
References
- Scherer, M. Advantages of the Integration of Image Processing and Direct Coordinate Measurement for Architectural Surveying—Development of the System TOTAL. In Proceedings of the XXII FIG International Congress, Washington, DC, USA, 19–26 April 2002. [Google Scholar]
- Scherer, M.; Lerma, J.L. From the Conventional Total Station to the Prospective Image Assisted Photogrammetric Scanning Total Station: Comprehensive Review. J. Surv. Eng. 2009, 135, 173–178. [Google Scholar] [CrossRef]
- Heritage, G.; Hetherington, D. Towards a protocol for laser scanning in fluvial geomorphology. Earth Surface Process. Landf. 2007, 32, 66–74. [Google Scholar] [CrossRef]
- Soni, A.; Robson, S.; Gleeson, B. Structural monitoring for the rail industry using conventional survey, laser scanning and photogrammetry. Appl. Geomat. 2015, 7, 123–138. [Google Scholar] [CrossRef]
- Böhler, W. Comparison of 3D laser scanning and other 3D measurement techniques. In Recording, Modeling and Visualization of Cultural Heritage; Baltsavias, E., Grün, A., Van Gool, L., Pateraki, M., Eds.; Taylor & Francis Group: London, UK, 2006; pp. 89–99. [Google Scholar]
- Slob, S.; Hack, R. 3D terrestrial laser scanning as a new field measurement and monitoring technique. In Engineering Geology for Infrastructure Planning in Europe; Hack, R., Azzam, R., Charlier, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; Volume 104, pp. 179–189. [Google Scholar]
- Gordon, S.J.; Lichti, D.D. Terrestrial Laser Scanners with a Narrow Field of View: The Effect on 3D Resection Solutions. Surv. Rev. 2004, 37, 448–468. [Google Scholar] [CrossRef]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning geometry: Influencing factor on the quality of terrestrial laser scanning points. ISPRS J. Photogramm. Remote Sens. 2011, 66, 389–399. [Google Scholar] [CrossRef]
- Trimble SX10 Scanning Total Station Information and Datasheet. Available online: http://infogeospatial.trimble.com/SX10.html (accessed on 10 March 2017).
- Lemmens, M. Total Stations: The Surveyor’s Workhorse. Available online: https://www.gim-international.com/content/article/total-stations-the-surveyor-s-workhorse (accessed on 10 March 2017).
- Ferreira, R.; Santos, V. State-of-the-Art Total Stations. Available online: https://www.gim-international.com/content/article/state-of-the-art-total-stations (accessed on 10 March 2017).
- Walser, B.H. Development and Calibration of an Image Assisted Total Station. Ph.D. Thesis, Swiss Federal Institute of Technology (ETH Zurich), Zurich, Switzerland, 2004. [Google Scholar]
- Wagner, A. A new approach for geo-monitoring using modern total stations and RGB + D images. Meas. J. Int. Meas. Confed. 2016, 82, 64–74. [Google Scholar] [CrossRef]
- Hauth, S.; Schlüter, M.; Thiery, F. Modular Imaging Total Stations—Sensor Fusion for high precision alignment. In Proceedings of the 3rd International Conference on Machine Control & Guidance, Stuttgart, Germany, 27–29 March 2012; pp. 202–210. [Google Scholar]
- Juretzko, M. Reflektorlose Video-Tachymetrie—Ein Integrales Verfahren Zur Erfassung Geometrischer Und Visueller Informationen. Ph.D. Thesis, Ruhr-Universität Bochum, Bochum, Germany, 2004. [Google Scholar]
- Wasmeier, P. Grundlagen der Deformationsbestimmung Mit Messdaten Bildgebender Tachymeter. Ph.D. Thesis, Technische Universität München, Munich, Germany, 2009. [Google Scholar]
- Zhou, Y.; Wagner, A.; Wunderlich, T.; Wasmeier, P. Calibration Method for IATS and Application in Multi-Target Monitoring using Coded Targets. In Proceedings of the 3rd Joint International Symposium on Deformation Monitoring, Vienna, Austria, 30 March–1 April 2016. [Google Scholar]
- Ehrhart, M.; Lienhart, W. Accurate Measurements with Image-Assisted Total Stations and Their Prerequisites. J. Surv. Eng. 2016. [Google Scholar] [CrossRef]
- Topcon IS-3 Series Information and Datasheet. Available online: https://www.topconpositioning.com/total-stations/robotic-total-stations/3-series (accessed on 10 March 2017).
- Leica Nova MS60 Information and Datasheet. Available online: http://www.leica-geosystems.us/en/Leica-Nova-MS60_106652.html (accessed on 10 March 2017).
- Ehrhart, M.; Lienhart, W. Monitoring of Civil Engineering Structures using a State-of-the-art Image Assisted Total Station. J. Appl. Geod. 2015, 9, 174–182. [Google Scholar] [CrossRef]
- Lackner, S.; Lienhart, W.; Supp, G.; Marte, R. Geodetic and fibre optic measurements of a full-scale bi-axial compressional test. Surv. Rev. 2016, 48, 86–93. [Google Scholar] [CrossRef]
- Zheng, S.; Ma, D.; Zhang, Z.; Hu, H.; Gui, L. A novel measurement method based on silhouette for chimney quasi-static deformation monitoring. Measurement 2012, 45, 226–234. [Google Scholar] [CrossRef]
- Pagliari, D.; Rossi, L.; Passoni, D.; Pinto, L.; De Michele, C.; Avanzi, F. Measuring the volume of flushed sediments in a reservoir using multi-temporal images acquired with UAS. Geomat. Nat. Hazards Risk 2016. [Google Scholar] [CrossRef]
- Thuro, K.; Singer, J.; Festl, J.; Wunderlich, T.; Wasmeier, P.; Reith, C.; Heunecke, O.; Glabsch, J.; Schuhbäck, S. New landslide monitoring techniques—Developments and experiences of the alpEWAS project. J. Appl. Geod. 2010, 4, 69–90. [Google Scholar] [CrossRef]
- Gómez-Vasconcelos, M.; Villamor, P.; Cronin, S.; Procter, J.; Kereszturi, G.; Palmer, A.; Townsend, D.; Leonard, G.; Berryman, K.R.; Ashraf, S. Earthquake history at the eastern boundary of the South Taupo Volcanic Zone, New Zealand. N. Z. J. Geol. Geophys. 2016, 59, 522–543. [Google Scholar] [CrossRef]
- Lee, H.S.; Lim, S.S.; Park, D.W. Application of Terrestrial Laser Scanner and Raster operations to Change Detection of Beach. J. Coast. Res. 2011, 64, 1692–1696. [Google Scholar]
- Woźniak, M.; Świerczyńska, E.; Jastrzȩbski, S. The Use of Video-Tacheometric Technology for Documenting and Analysing Geometric Features of Objects. Rep. Geod. Geoinform. 2015, 99, 28–43. [Google Scholar] [CrossRef]
- Sepasgozar, S.M.E.; Lim, S.; Shirowzhan, S.; Kim, Y.M. Implementation of As-Built Information Modelling Using Mobile and Terrestrial Lidar Systems. In Proceedings of the 31st International Symposium on Automation and Robotics in Construction and Mining (ISARC), Sydney, Australia, 9–11 July 2014. [Google Scholar]
- Hofmann, S.; Brenner, C. Accuracy Assessment of Mobile Mapping Point Clouds Using the Existing Environment As Terrestrial Reference. In Proceedings of the XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016; Volume XLI-B1, pp. 601–608. [Google Scholar]
- Evgenikou, V.; Georgopoulos, A. Investigating 3D reconstruction methods for small artifacts. In Proceedings of the ISPRS International Workshop 3D-Arch 2015, Avila, Spain, 25–27 February 2015; Volume XL-5/W4, pp. 101–108. [Google Scholar]
- Caprioli, M.; Scognamiglio, A. Low Cost Methodology for 3D Modeling and Metric Description in Architectural Heritage. In Proceedings of the ISPRS International Workshop 3D-ARCH 2009, Trento, Italy, 25–28 February 2009; Volume XXXVIII-5. [Google Scholar]
- Wagner, A.; Wiedemann, W.; Wunderlich, T. Using IATS to Read and Analyze Digital Leveling Staffs. In Proceedings of the SIG 2016 “International Symposium on Engineering Geodesy”, Varazdin, Croatia, 20–22 May 2016; pp. 515–526. [Google Scholar]
- FARO Focus3D Information and Datasheet. Available online: http://www.faro.com/products/3d-surveying/laser-scanner-faro-focus-3d/overview (accessed on 10 March 2017).
- Leica ScanStation C10 Information and Datasheet. Available online: http://leica-geosystems.com/products/laser-scanners/scanners/leica-scanstation-c10 (accessed on 10 March 2017).
- CloudCompare Free Software. Available online: http://www.danielgm.net/cc/ (accessed on 10 March 2017).
- Grussenmeyer, P.; Landes, T.; Doneus, M.; Lerma, J.L. Basics of range-based modelling techniques in Cultural Heritage. In 3D Recording, Documentation and Management of Cultural Heritage; Stylianidis, E., Remondino, F., Eds.; Whittles Publishing: Dunbeath, UK, 2016; pp. 305–368. [Google Scholar]
- Lachat, E.; Landes, T.; Grussenmeyer, P. First experiences with the Trimble SX10 Scanning Total Station for building facade survey. In Proceedings of the ISPRS International Workshop 3D-Arch 2017, Nafplio, Greece, 1–3 March 2017; Volume XLII-2/W3, pp. 405–412. [Google Scholar]
- Kaasalainen, S.; Krooks, A.; Kukko, A.; Kaartinen, H. Radiometric Calibration of Terrestrial Laser Scanners with External Reference Targets. Remote Sens. 2009, 1, 144–158. [Google Scholar] [CrossRef]
- Lichti, D.D.; Harvey, B. The Effects of Reflecting Surface Material Properties on Time-of-Flight Laser Scanner Measurements. In Proceedings of the ISPRS Commission IV Symposium “Geospatial Theory, Processing and Applications”, Ottawa, ON, Canada, 9–12 July 2002. [Google Scholar]
- Voegtle, T.; Schwab, I.; Landes, T. Influences of different materials on the measurements of a terrestrial laser scanner (TLS). In Proceedings of the XXI ISPRS Congress, Beijing, China, 3–11 July 2008; Volume XXXVII-B5, pp. 1061–1066. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Topcon IS-3 | Leica MS60 | Trimble SX10 | |
|---|---|---|---|
 |  |  | |
| Date of release | 2011 | 2015 | 2016 |
| Angular accuracy | 1”, 3” or 5” | 1” | 1” |
| EDM maximum range | 5000 m (prism) | 10,000 m (prism) | 5500 m (prism) |
| 2000 m (non prism) | 2000 m (non prism) | 800 m (non prism) | |
| EDM accuracy (prism) | 2 mm + 2 ppm | 1 mm + 1.5 ppm | 1 mm + 1.5 ppm |
| EDM accuracy (non-prism) | 10 mm + 10 ppm | 2 mm + 2 ppm | 2 mm + 1.5 ppm |
| Imaging | |||
| Number and kind of cameras | wide-angle + coaxial | overview + telescope | overview + primary + coaxial |
| Resolution | 1.3 megapixel | 5 megapixel | 5 megapixel |
| Frame rate | up to 10 Hz | up to 20 Hz | up to 15 Hz |
| Scanning | |||
| Maximum rate | 20 pts/s | 1000 pts/s @ 300 m | 26,600 pts/s |
| Maximum range | 2000 m | 1000 m (limited to 1 Hz) | 600 m |
| Scanning range noise | - | 1 mm @ 50 m | 1.5 mm @ 50 m |
| Specifications | Overview Camera | Primary Camera | Telescope Camera |
|---|---|---|---|
| Position relative to EDM axis | parallel | parallel | coaxial |
| Field of view | 54° | 12° | 2° |
| Pixel size @ 50 m | 20 mm | 4.4 mm | 0.88 mm |
| Coarse | Standard | Fine | Superfine | |
|---|---|---|---|---|
| Point spacing @ 10 m | 10 mm | 5 mm | 2 mm | 1 mm |
| Leica ScanStation C10 | FARO Focus3D X330 | Trimble SX10 Scanning Total Station | |
|---|---|---|---|
 |  |  | |
| Measurement principle | time-of-flight | phase-shift | time-of-flight |
| Scanning rate | up to 50 kHz | up to 976 kHz | up to 26.6 kHz |
| Max. measurement range | 300 m | 330 m | 600 m |
| Accuracy criterion * | Accuracy of single dist. measurement: 4 mm @ 1–50 m (one sigma) | Ranging error: 2 mm @ 25 m (one sigma) | Distance measurement accuracy (DR mode): 2 mm + 1.5 ppm |
| Range noise * | 2 mm | max. 0.5 mm @ 25 m | 1.5 mm @ 50 m |
| Point spacing | <1 mm minimum through full range * | from 1.5 mm to 49 mm @ 10 m | from 1 mm to 10 mm @ 10 m |
| Laser wavelength | 532 nm | 1550 nm | 1550 nm |
| Date of release | 2009 | 2013 | 2016 |
| Range Interval | Number of Points | Percentage According to Whole Point Cloud |
|---|---|---|
| <100 m | 412,861 | 32.95% |
| 100 m–200 m | 446,500 | 35.64% |
| 200 m–300 m | 235,924 | 18.83% |
| 300 m–400 m | 71,201 | 5.68% |
| 400 m–500 m | 38,714 | 3.09% |
| 500 m–600 m | 33,311 | 2.66% |
| 600 m–700 m | 11,558 | 0.92% |
| 700 m–800 m | 1313 | 0.10% |
| 800 m–900 m | 1425 | 0.11% |
| >900 m | 125 | 0.01% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lachat, E.; Landes, T.; Grussenmeyer, P. Investigation of a Combined Surveying and Scanning Device: The Trimble SX10 Scanning Total Station. Sensors 2017, 17, 730. https://doi.org/10.3390/s17040730
Lachat E, Landes T, Grussenmeyer P. Investigation of a Combined Surveying and Scanning Device: The Trimble SX10 Scanning Total Station. Sensors. 2017; 17(4):730. https://doi.org/10.3390/s17040730
Chicago/Turabian StyleLachat, Elise, Tania Landes, and Pierre Grussenmeyer. 2017. "Investigation of a Combined Surveying and Scanning Device: The Trimble SX10 Scanning Total Station" Sensors 17, no. 4: 730. https://doi.org/10.3390/s17040730
APA StyleLachat, E., Landes, T., & Grussenmeyer, P. (2017). Investigation of a Combined Surveying and Scanning Device: The Trimble SX10 Scanning Total Station. Sensors, 17(4), 730. https://doi.org/10.3390/s17040730