Adaptive Enhancement of X-Band Marine Radar Imagery to Detect Oil Spill Segments

Abstract
:1. Introduction
2. Data Collecting and Preprocessing
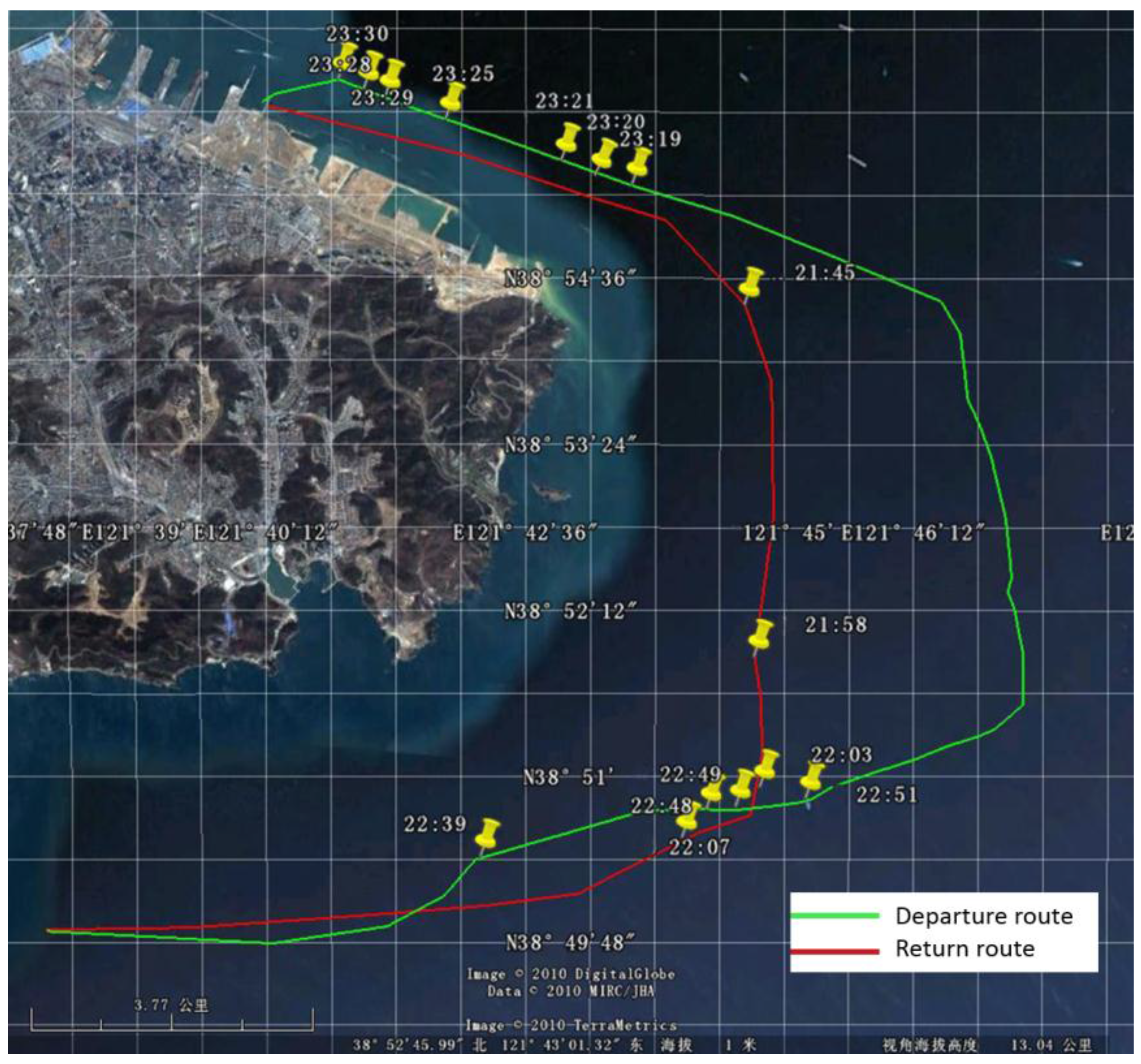
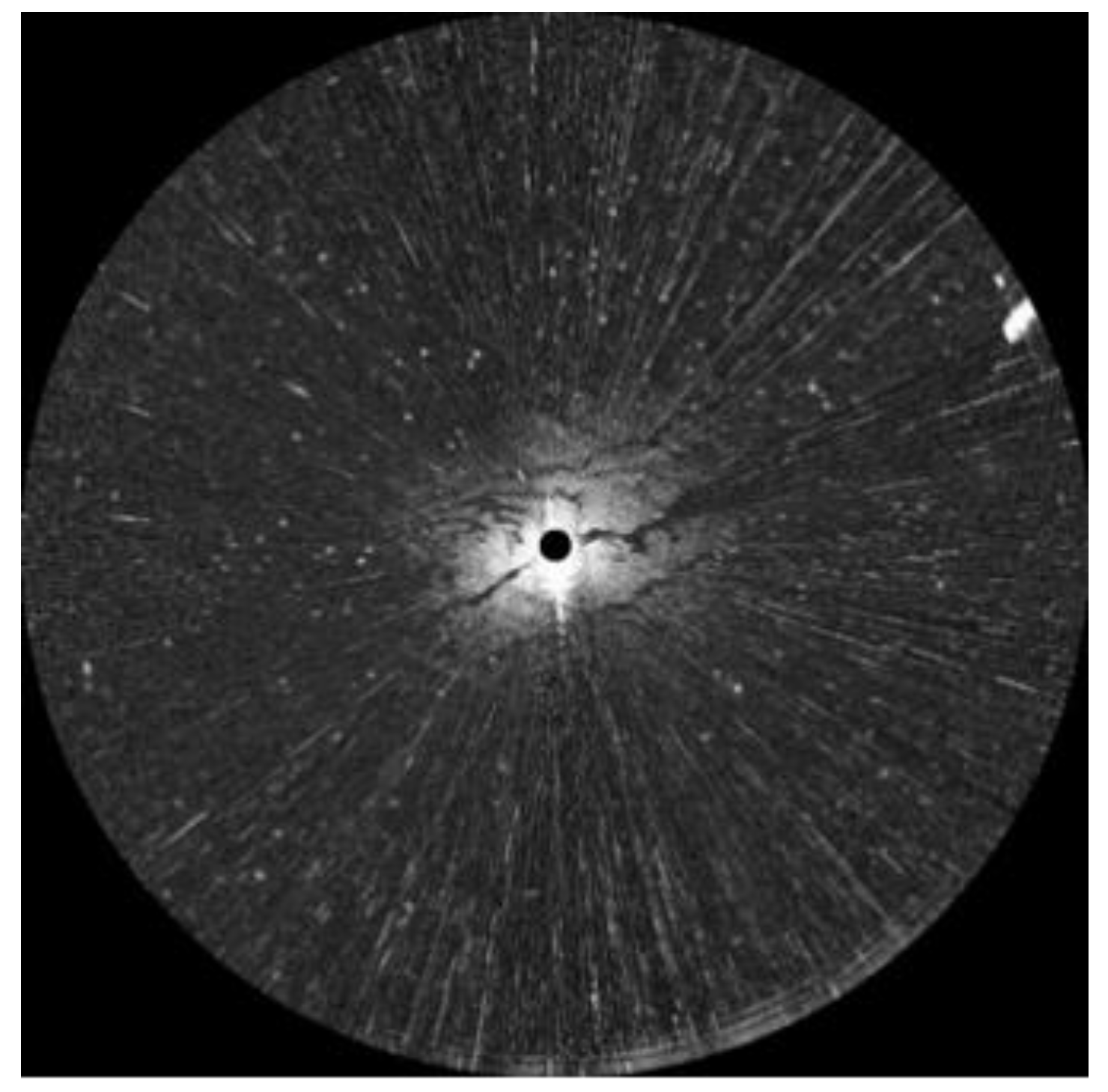
2.1. Radar Image Collection
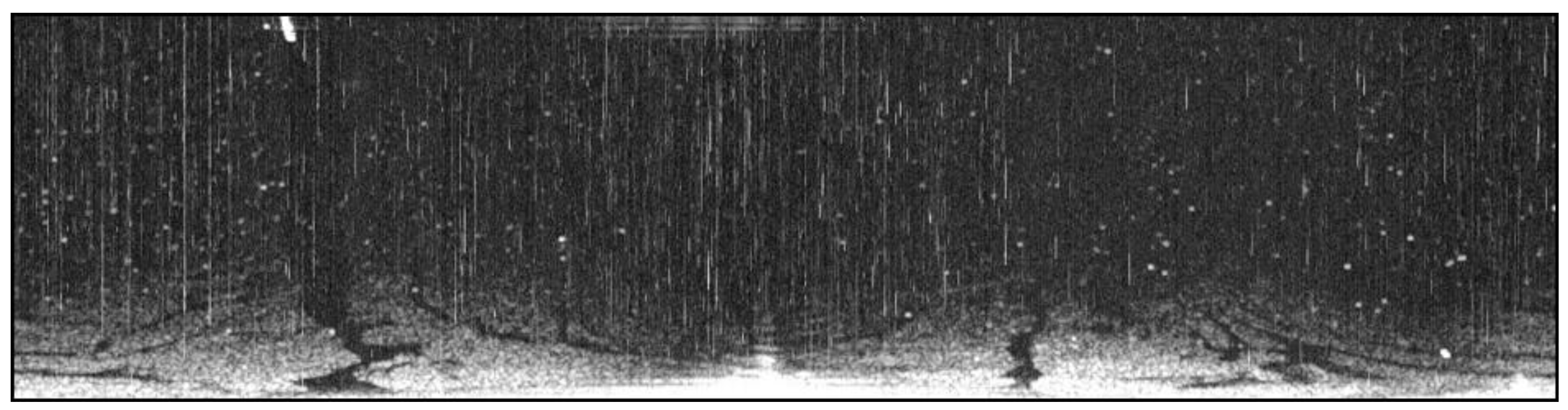
2.2. Radar Image Preprocessing
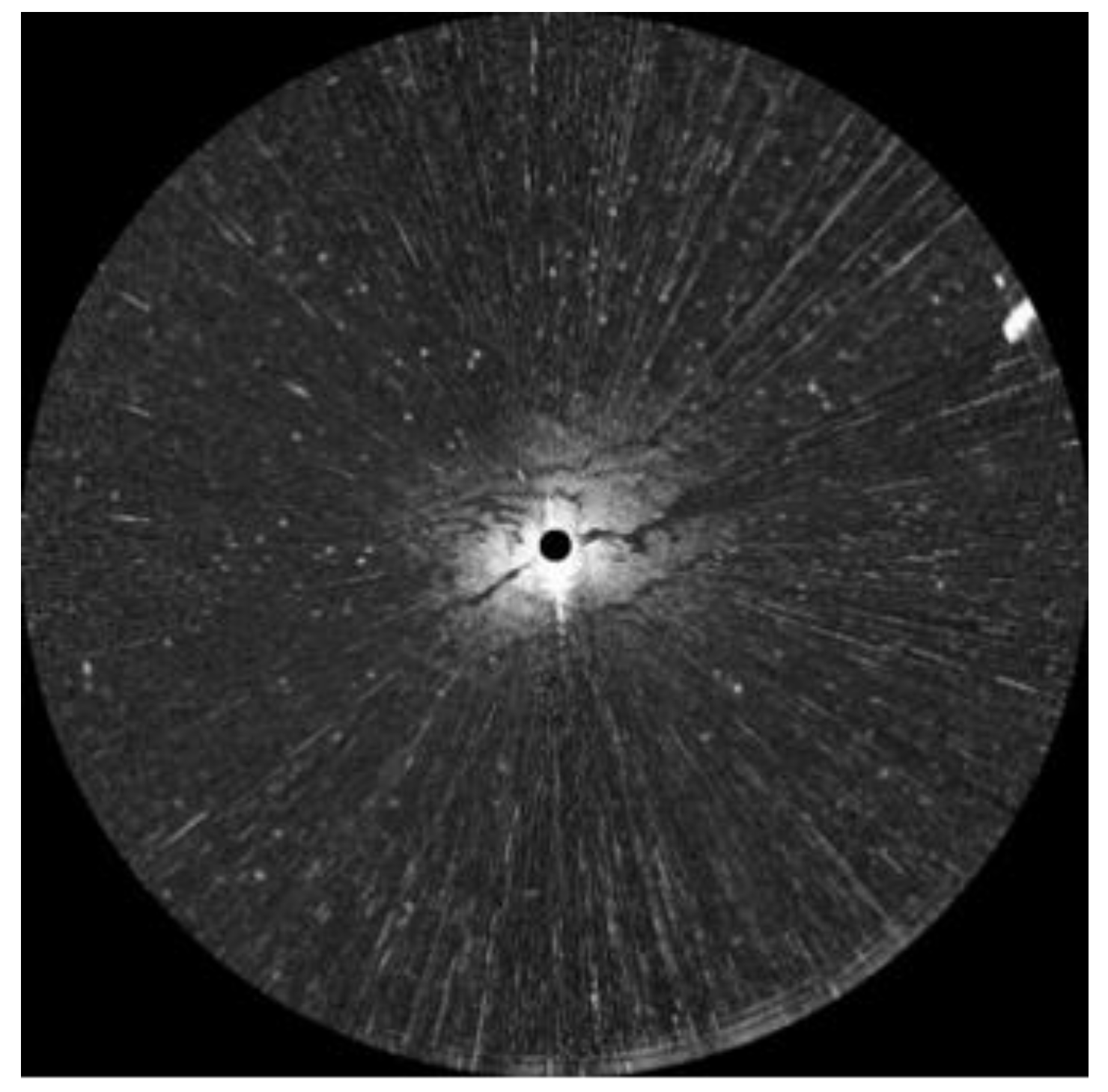
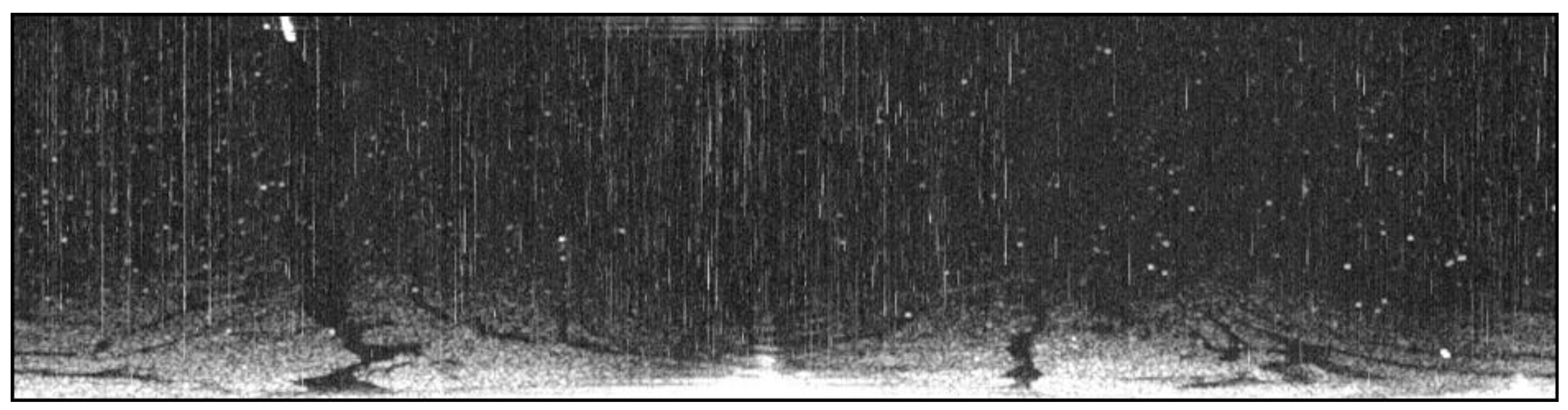
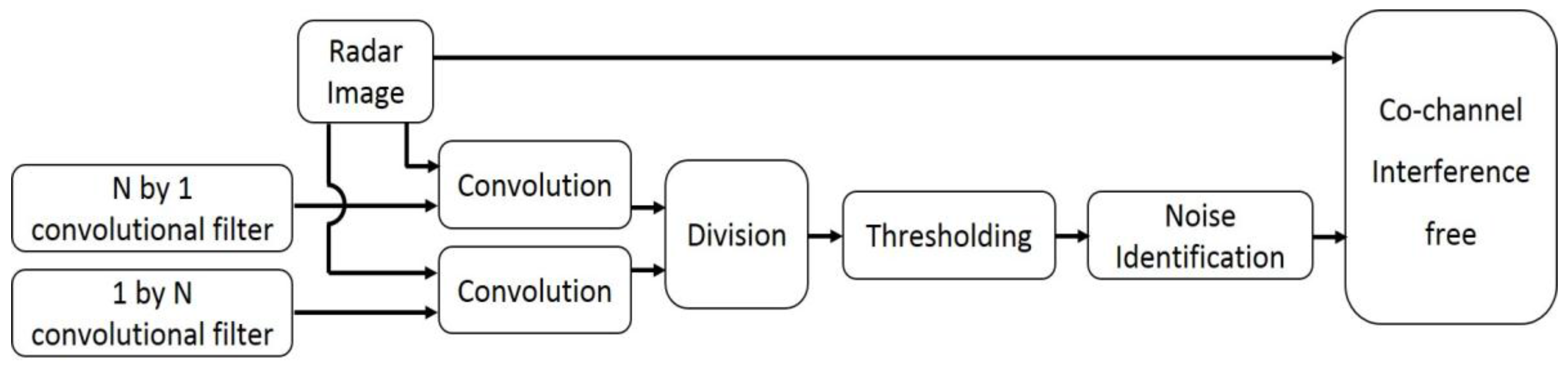
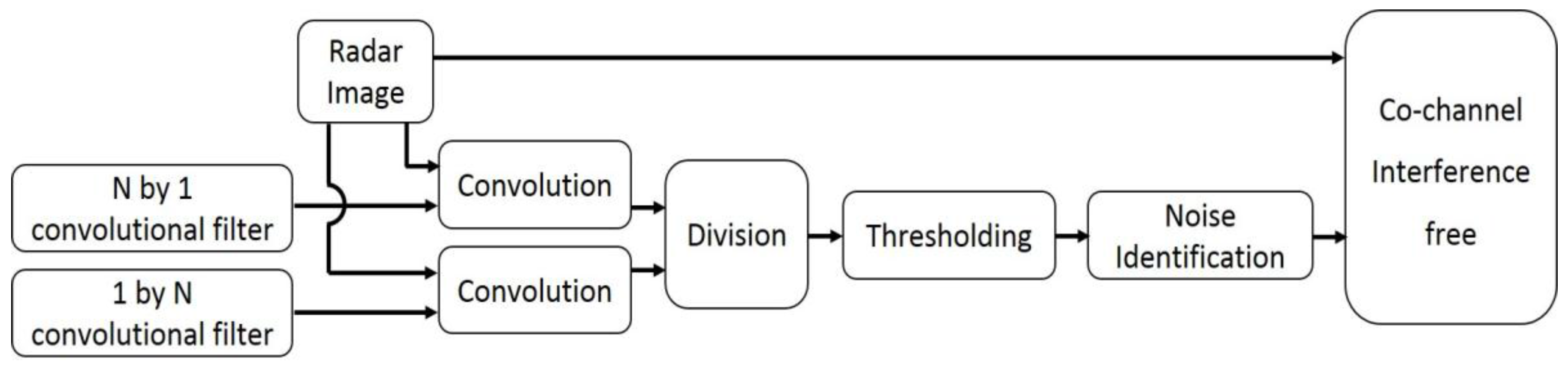
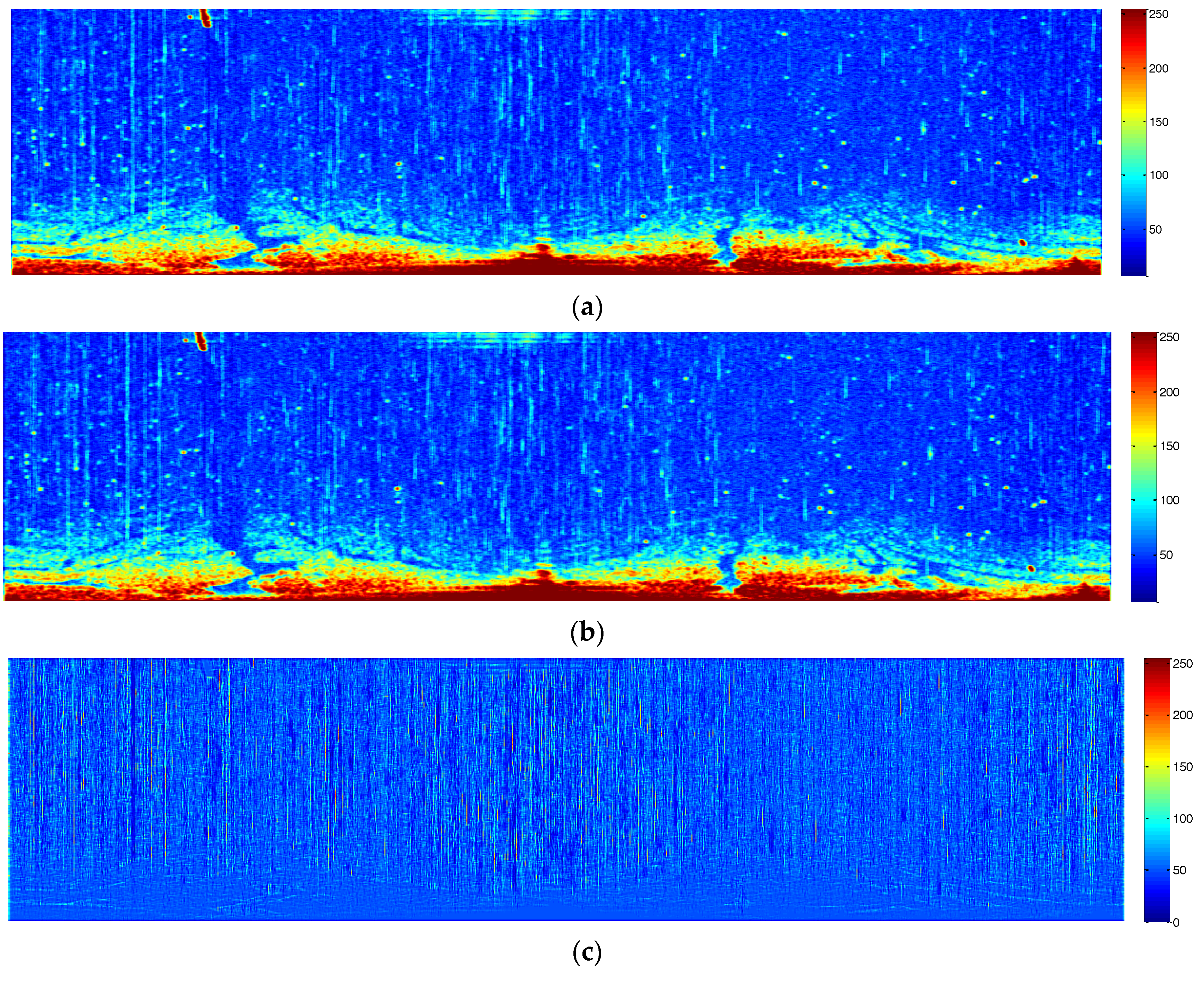
2.2.1. Co-Channel Interference
2.2.2. Small Objects
2.2.3. Regions Selected for the Current Study
3. Adaptive Enhancement to Detect Oil Spill
4. Evaluation of the Improved Adaptive Enhancement
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lardner, R.; Zodiatis, G. Modelling oil plumes from subsurface spills. Mar. Pollut. Bull. 2017. [Google Scholar] [CrossRef] [PubMed]
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Radhakrishnan, H.; Panagiotakis, C.; Lardner, R. Multidisciplinary oil spill modeling to protect coastal communities and the environment of the Eastern Mediterranean Sea. Sci. Rep. 2016, 6, 36882. [Google Scholar] [CrossRef] [PubMed]
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Lardner, R.; Panagiotakis, C.; Radhakrishnan, H. Modelling of oil spills in confined maritime basins: The case for early response in the Eastern Mediterranean Sea. Environ. Pollut. 2015, 206, 390–399. [Google Scholar] [CrossRef] [PubMed]
- Alves, T.M.; Kokinou, E.; Zodiatis, G. A three-step model to assess shoreline and offshore susceptibility to oil spills: The South Aegean (Crete) as an analogue for confined marine basins. Mar. Pollut. Bull. 2014, 86, 443–457. [Google Scholar] [CrossRef] [PubMed]
- Delpeche-Ellmann, N.C.; Soomere, T. Investigating the Marine Protected Areas most at risk of current-driven pollution in the Gulf of Finland, the Baltic Sea, using a Lagrangian transport model. Mar. Pollut. Bull. 2013, 67, 121–129. [Google Scholar] [CrossRef] [PubMed]
- Bartsch, N.; Gruner, K.; Keydel, W.; Witte, F. Contributions to oil-spill detection and analysis with radar and microwave radiometry: Results of the archimedes II campaign. IEEE Trans. Geosci. Remote Sens. 1987, 25, 677–690. [Google Scholar] [CrossRef]
- International Maritime Organization. Appendix A: Extract from regulation 12. In International Convention for the Safety of Life at Sea; IMO: London, UK, 1974; Chapter V. [Google Scholar]
- Brown, C.E. Chapter 7 Laser Fluorosensors. In Oil Spill Science and Technology; Fingas, M., Ed.; Elsevier: Burlington, VT, USA, 2011; pp. 171–182. [Google Scholar]
- Bolus, R.L. Airborne Testing of a Suite of Remote Sensors for Oil Spill Detecting on Water. In Proceedings of the Second Thematic International Airborne Remote Sensing Conference and Exhibition, AnnArbor, MI, USA, 24–27 June 1996; pp. 743–753. [Google Scholar]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 199–208. [Google Scholar] [CrossRef] [PubMed]
- Atanassov, V.; Mladenov, L.; Rangelov, R.; Savchenko, A. Observation of oil slicks on the sea surface by using marine navigation radar. In Proceedings of the Remote Sensing, Global Monitoring for Earth Management: 1991 International Geoscience and Remote Sensing Symposium, Helsinki University of Technology, Espo, Finland, 3–6 June 1991; pp. 1323–1326. [Google Scholar]
- Nost, E.; Egset, C.N. Oil spill detection system—Results from field trials. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006. [Google Scholar]
- Gangeskar, R. Automatic oil-spill detection by marine X-band radars. Sea Technol. 2004, 45, 40–45. [Google Scholar]
- SeaDarQ. Available online: http://www.seadarq.com/seadarq/products/oil-spill-detection-1 (accessed on 10 September 2017).
- Chu, X.L.; Ming, X.U.; Wang, F.; Wang, J. Analysis of the wave information extracted by X-band radar. Period. Ocean Univ. China 2011, 41, 110–113. [Google Scholar]
- Tennyson, E.J. Shipboard navigational radar as an oil spill tracking tool: A preliminary assessment. In Proceedings of the IEEE OCEANS 1988, Baltimore, MD, USA, 31 October–2 November 1988; Volume 3, pp. 857–859. [Google Scholar]
- Zhu, X.; Li, Y.; Feng, H.; Liu, B.; Xu, J. Oil spill detection method using X-band marine radar imagery. J. Appl. Remote Sens. 2015, 9, 123–129. [Google Scholar] [CrossRef]
- Otsu, N. Threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Sezgin, M.; Sankur, B. Survey over image thresholding techniques and quantitative performance evaluation. J. Electron. Imaging 2004, 13, 146–165. [Google Scholar]
- Kundu, A.; Mitra, S.K.; Vaidyanathan, P.P. Application of two-dimensional generalized mean filtering for removal of impulse noises from images. IEEE Trans. Acoust. Speech 1984, 32, 600–609. [Google Scholar] [CrossRef]
- Roth, S.; Black, M.J. Fields of Experts. Int. J. Comput. Vis. 2009, 82, 205–229. [Google Scholar] [CrossRef]
- Nghiem, S.V.; Li, F.K.; Lou, S.H.; Neumann, G. Ocean remote sensing with airborne Ku-band scatterometer. In Proceedings of the OCEANS’93, Victoria, BC, Canada, 18–21 October1993; pp. I20–I24. [Google Scholar]
- Schroeder, L.; Schaffner, P.; Mitchell, J.; Jones, W. AAFE RADSCAT 13.9-GHz measurements and analysis: Wind-speed signature of the ocean. IEEE J. Ocean. Eng. 1985, 10, 346–357. [Google Scholar] [CrossRef]
- Niblack, W. An Introduction to Digital Image Processing; Prentice Hall: Upper Saddle River, NJ, USA, 1986. [Google Scholar]
- Sauvola, J.; Pietikäinen, M. Adaptive document image binarization. Pattern Recognit. 2000, 33, 225–236. [Google Scholar] [CrossRef]
- White, J.M.; Rohrer, G.D. Image thresholding for optical character recognition and other applications requiring character image extraction. IBM J. Res. Dev. 1983, 27, 400–411. [Google Scholar] [CrossRef]
- Yanowitz, S.D.; Bruckstein, A.M. A new method for image segmentation. Comput. Graph. Image Process. 1989, 46, 82–95. [Google Scholar] [CrossRef]
- Wall, R.J. The Gray Level Histogram for Threshold Boundary Determination in Image Processing to the Scene Segmentation Problem in Human Chromosome Analysis. Ph.D. Thesis, University of California at Los Angeles, Los Angeles, CA, USA, 1974. [Google Scholar]
- Bradley, D.; Roth, G. Adaptive thresholding using the Integral Image. J. Graph. Tools 2007, 12, 13–21. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Parameters | |
|---|---|---|
| Working frequency | 9.41 GHz | |
| Antenna type | Waveguide split antenna | |
| Observation range | 0.1~5.0 km | |
| Detection angle | Horizontal direction | 360° |
| Vertical direction | ±10° | |
| Pulse width | 50 ns/250 ns/750 ns | |
| Pulse Repetition frequency | 3000 Hz/1800 Hz/785 Hz | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, P.; Li, Y.; Xu, J.; Zhu, X. Adaptive Enhancement of X-Band Marine Radar Imagery to Detect Oil Spill Segments. Sensors 2017, 17, 2349. https://doi.org/10.3390/s17102349
Liu P, Li Y, Xu J, Zhu X. Adaptive Enhancement of X-Band Marine Radar Imagery to Detect Oil Spill Segments. Sensors. 2017; 17(10):2349. https://doi.org/10.3390/s17102349
Chicago/Turabian StyleLiu, Peng, Ying Li, Jin Xu, and Xueyuan Zhu. 2017. "Adaptive Enhancement of X-Band Marine Radar Imagery to Detect Oil Spill Segments" Sensors 17, no. 10: 2349. https://doi.org/10.3390/s17102349
APA StyleLiu, P., Li, Y., Xu, J., & Zhu, X. (2017). Adaptive Enhancement of X-Band Marine Radar Imagery to Detect Oil Spill Segments. Sensors, 17(10), 2349. https://doi.org/10.3390/s17102349