Cooperative Localization for Multi-AUVs Based on GM-PHD Filters and Information Entropy Theory


Abstract
:1. Introduction
2. Background
2.1. Assumptions
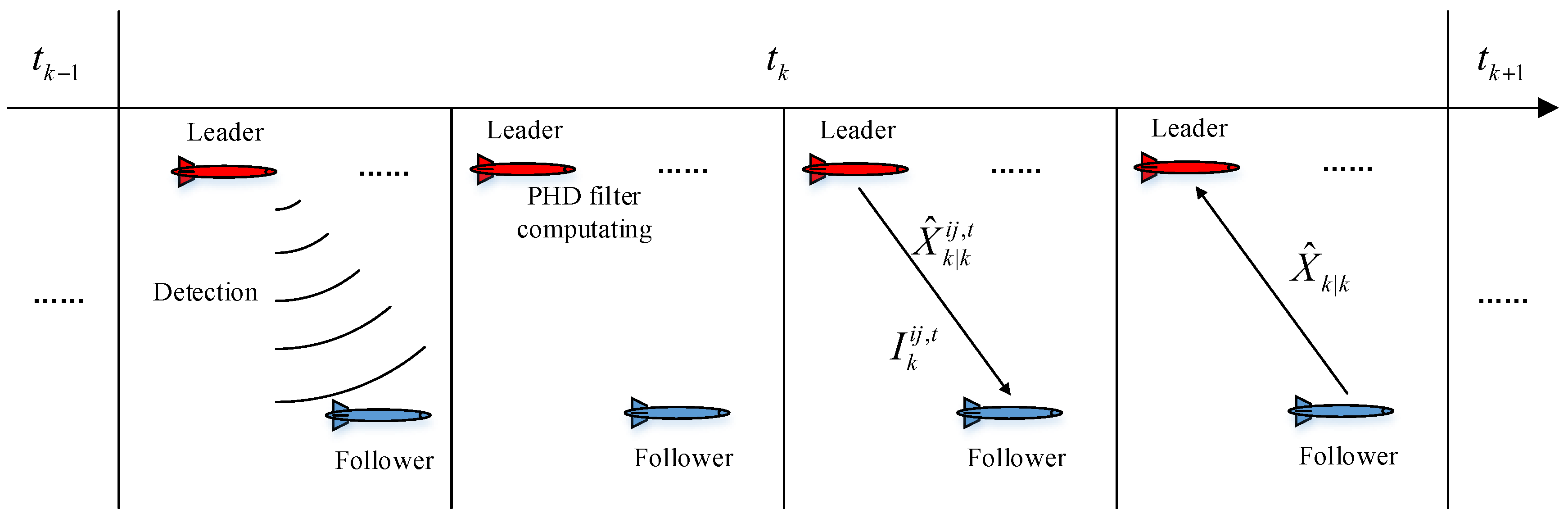
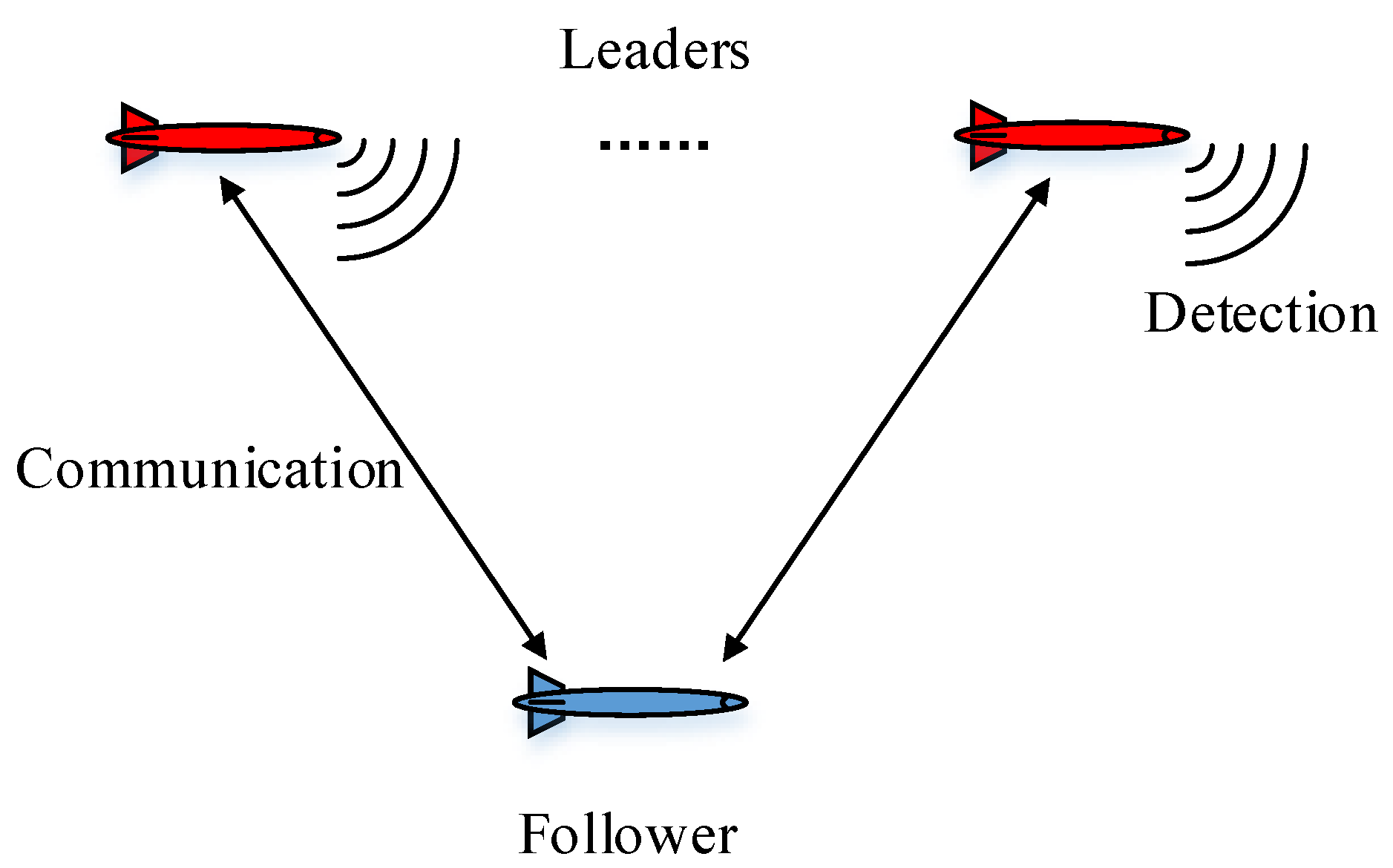
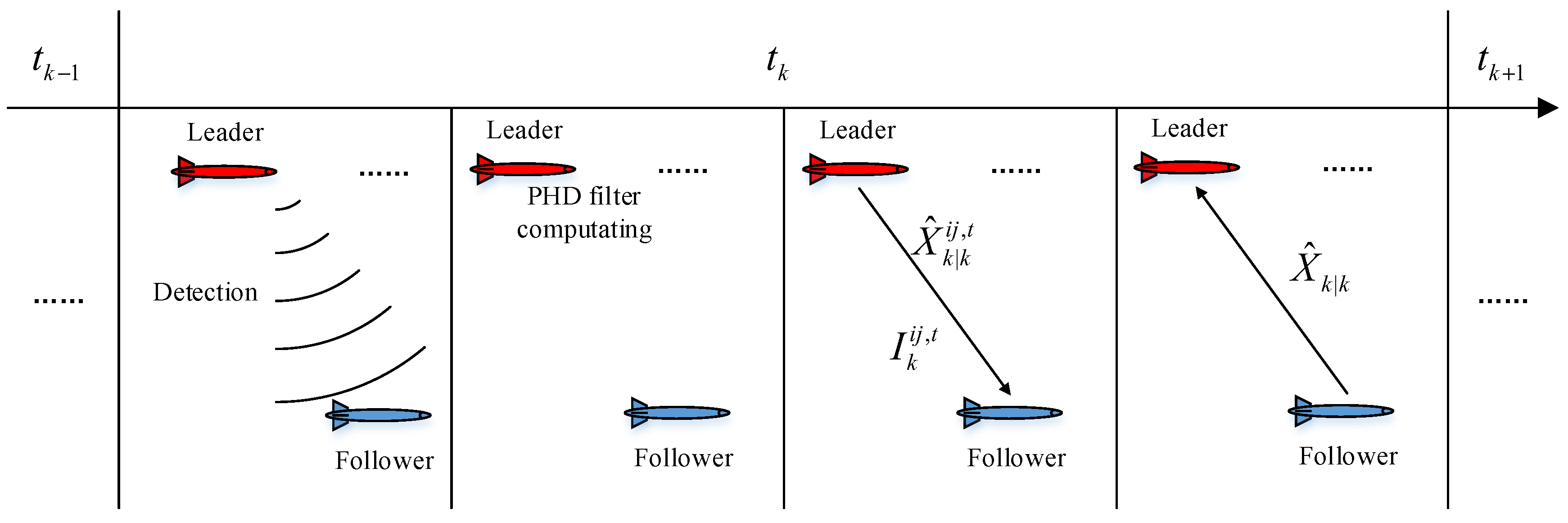
- The leader–follower structure is taken in order to achieve high accuracy with lower cost, in contrast to the parallel structure. Notice that the number of the leaders could be multiple, whereas the number of the followers is strictly limited to one.
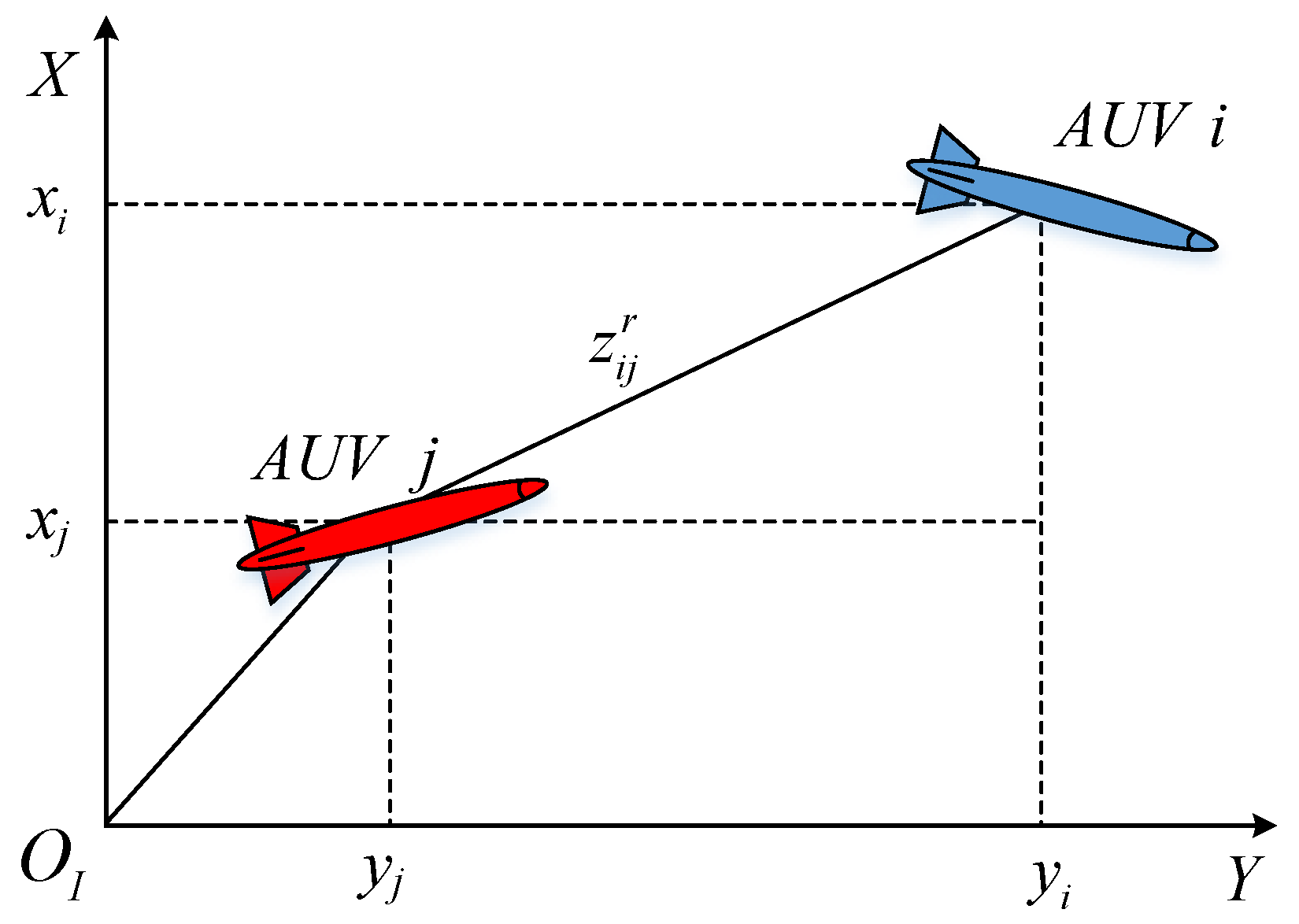
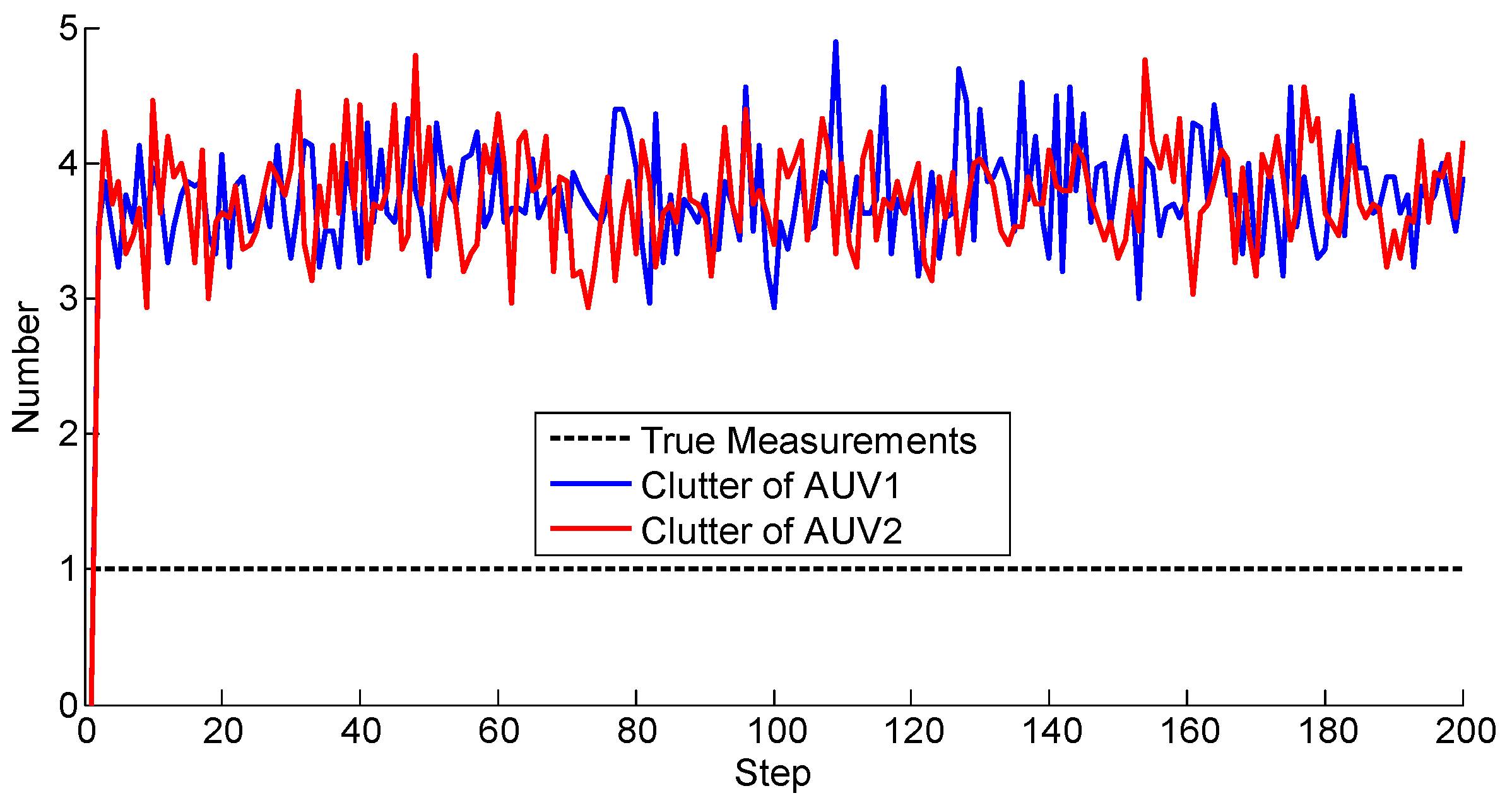
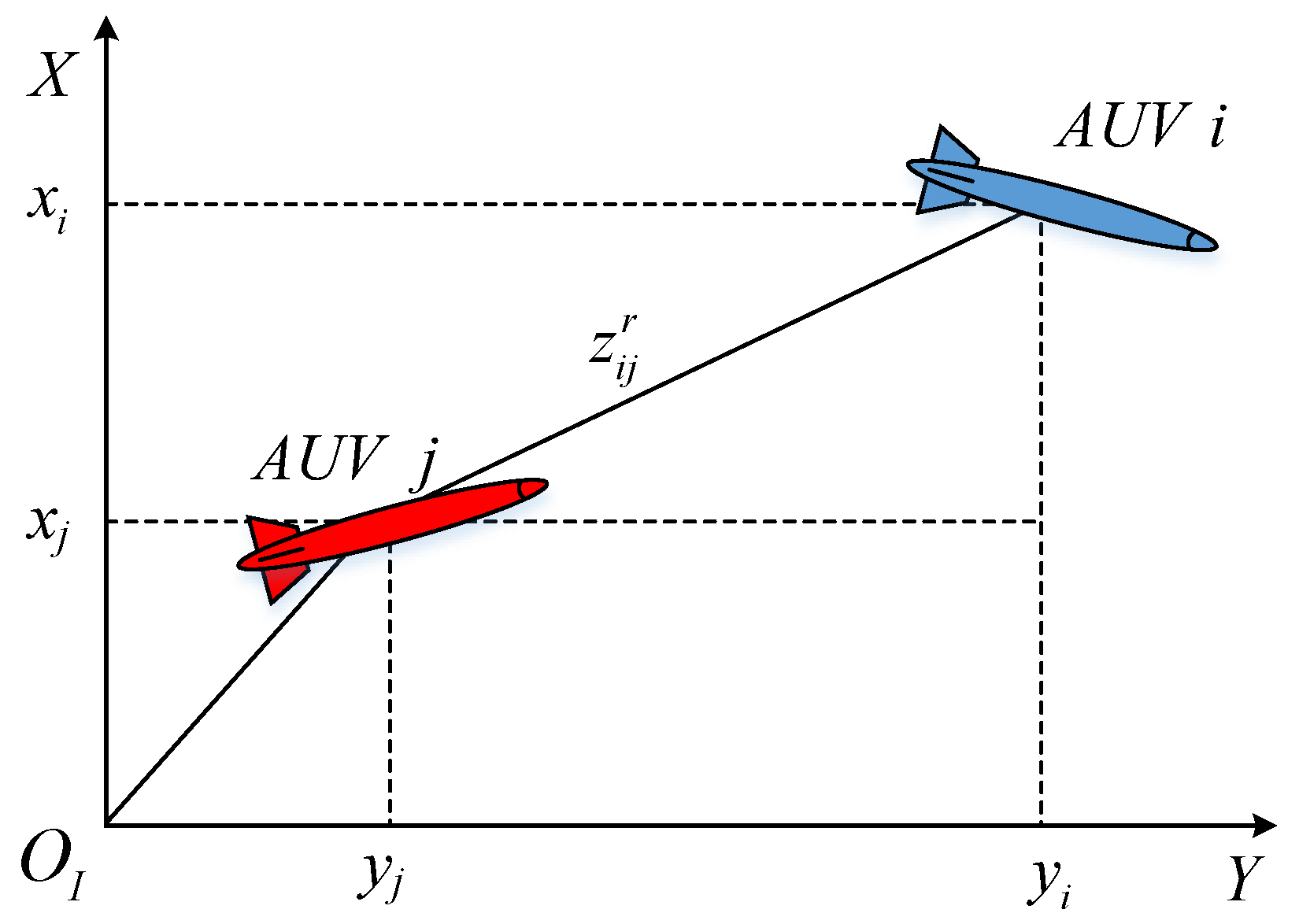
- Each AUV receives relative measurements of the others in the format of the range and bearing in local (body) coordinates. The global position of the follower can be calculated according to the measurement and the accurate position of the leader. However, the sonar cannot classify the clutter and the true measurements.
- In this paper, only the communication between the leaders and the to-be-localized followers is considered. The measuring noise and connectivity uncertainty of the network are incorporated, whereas the time delay is beyond the scope of this paper.
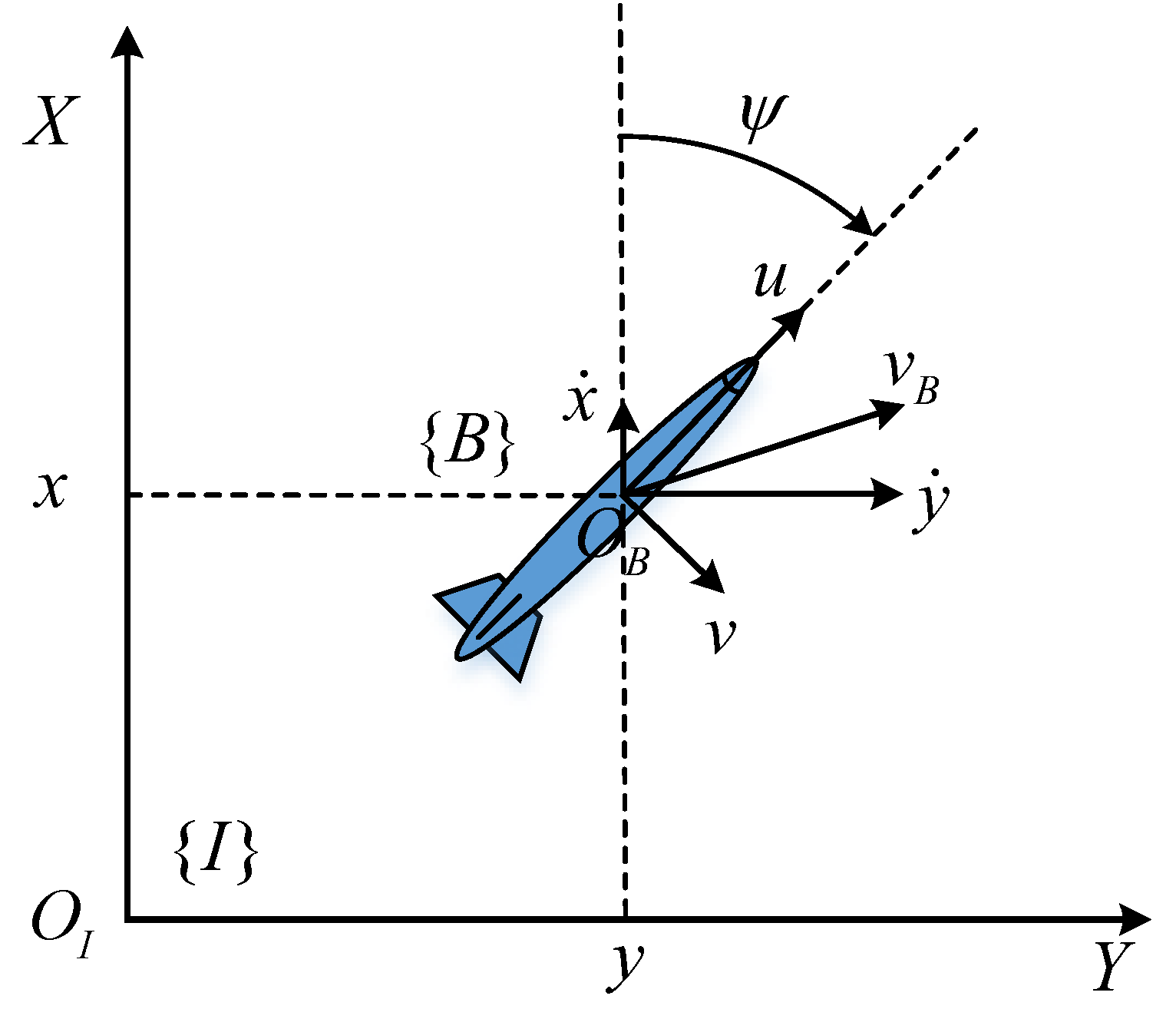
2.2. Mathematic Models
2.2.1. Model of AUV
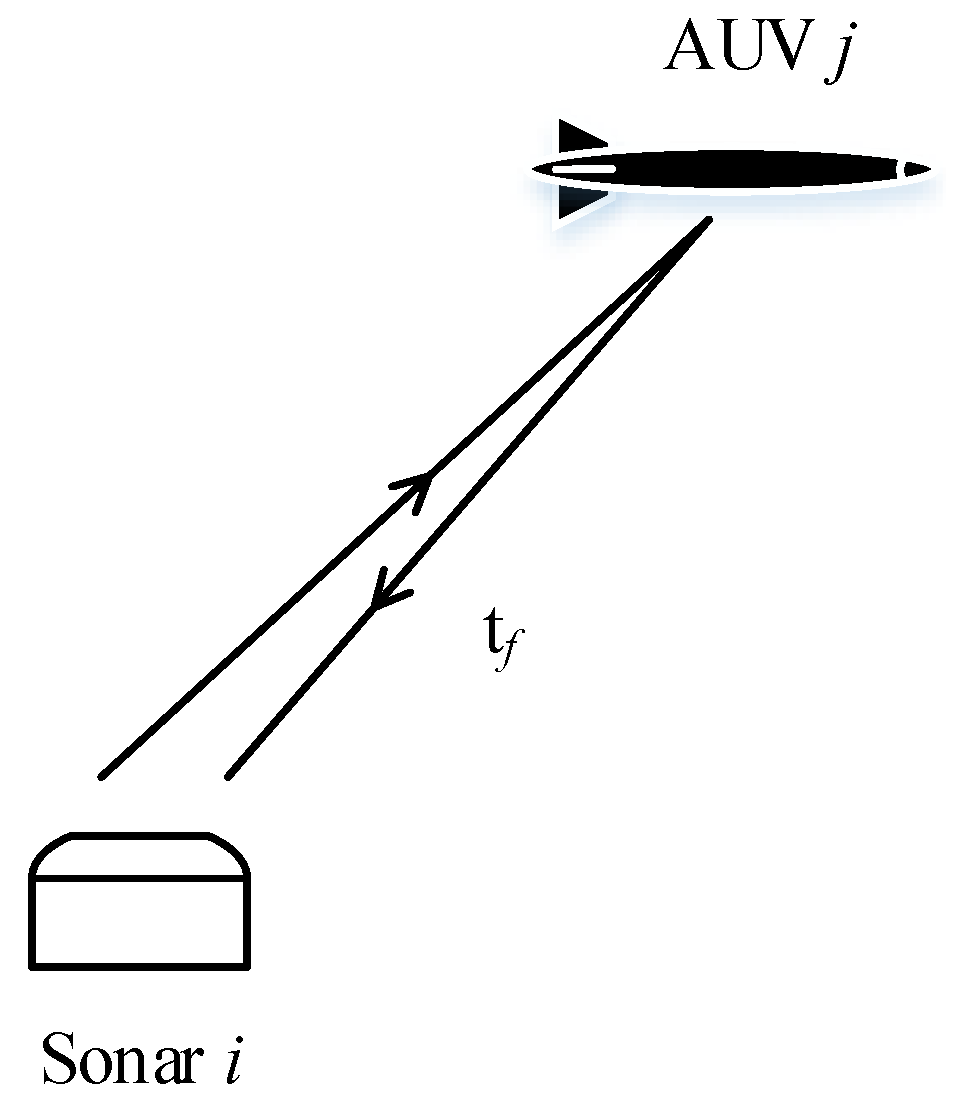
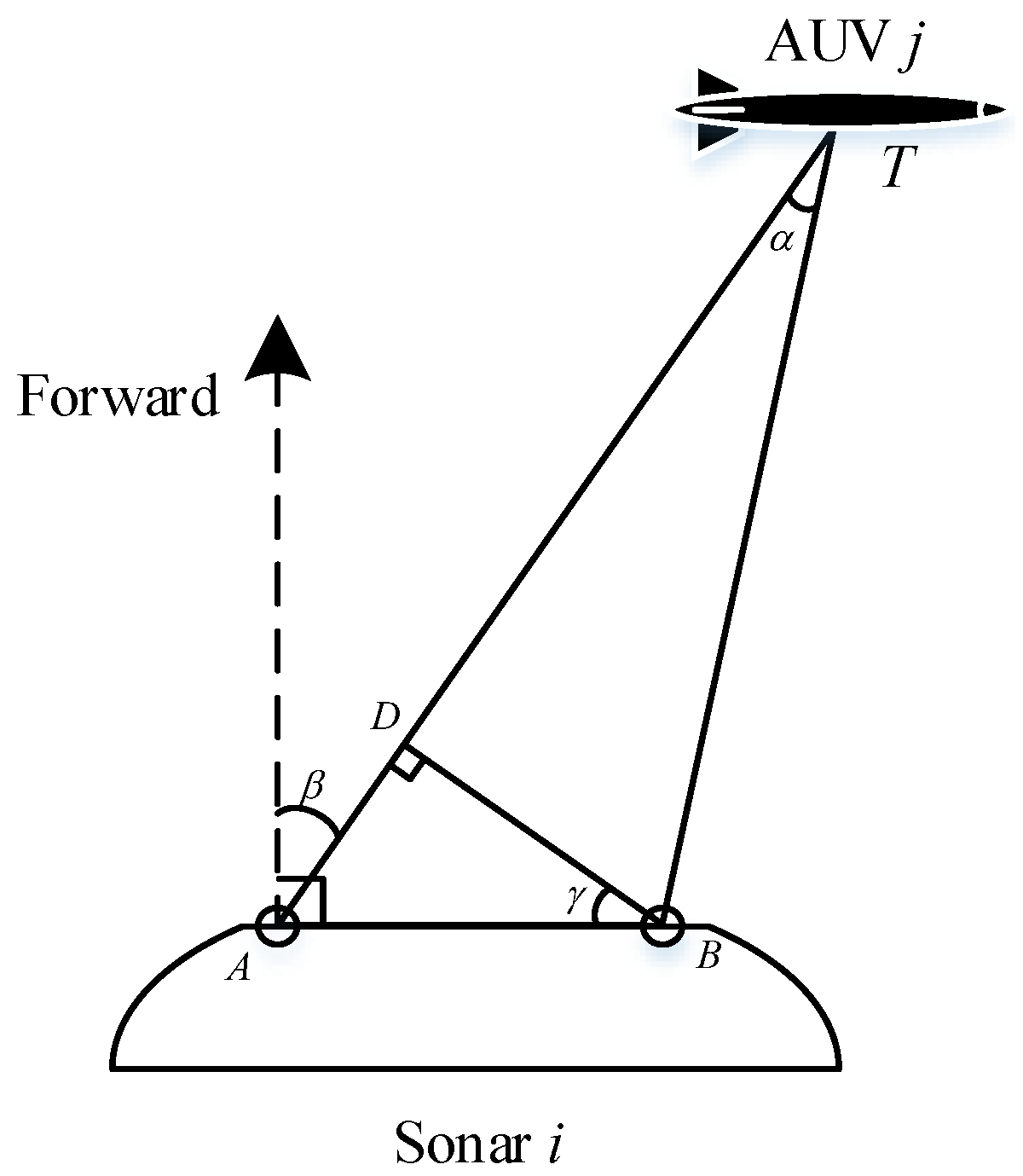
2.2.2. Model of the Detecting Sonar
A. Relative Distance-Sensing Part
B. Relative Direction-Sensing Part
2.3. PHD Filter
2.4. Information Entropy Theory
3. Algorithm Design
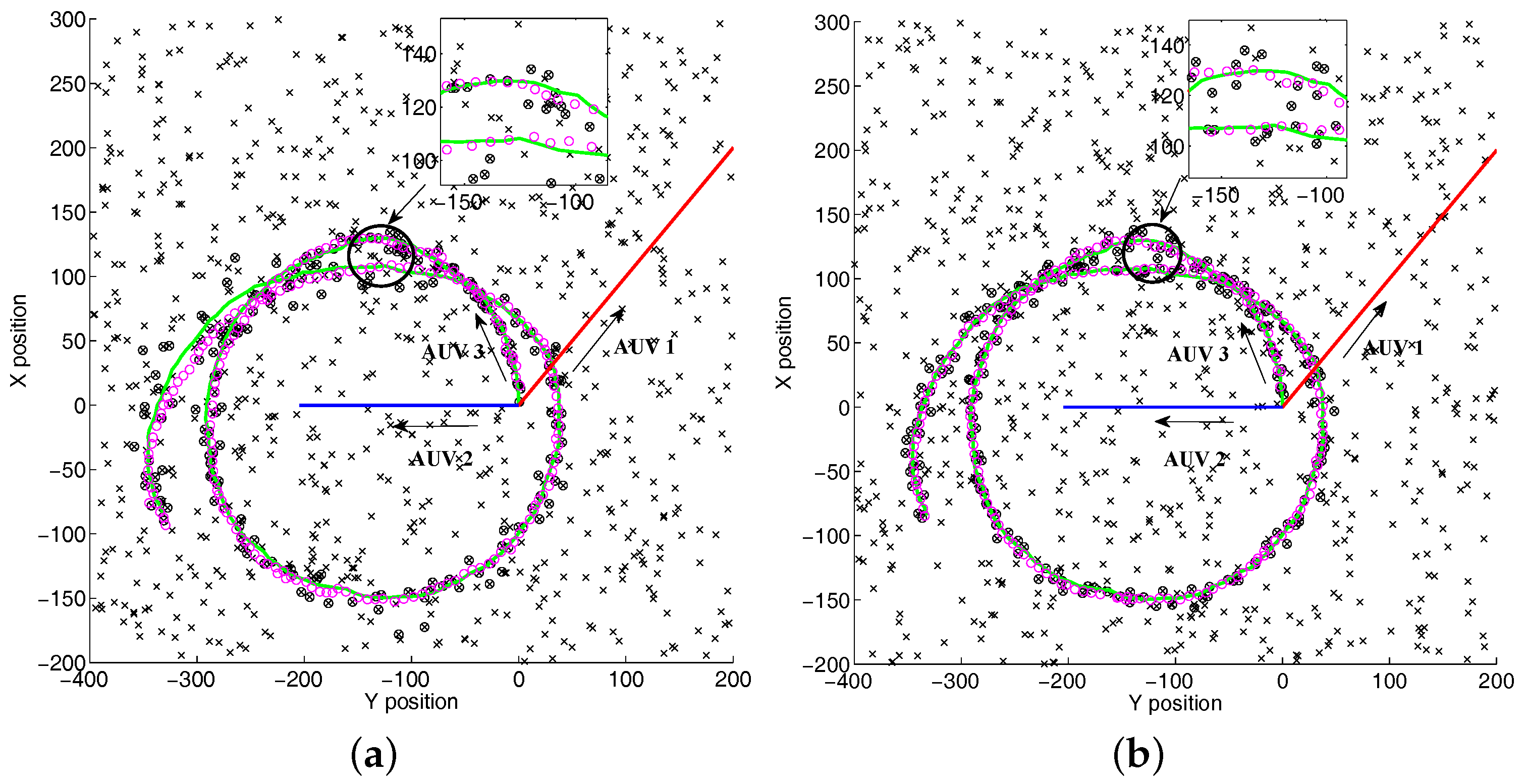
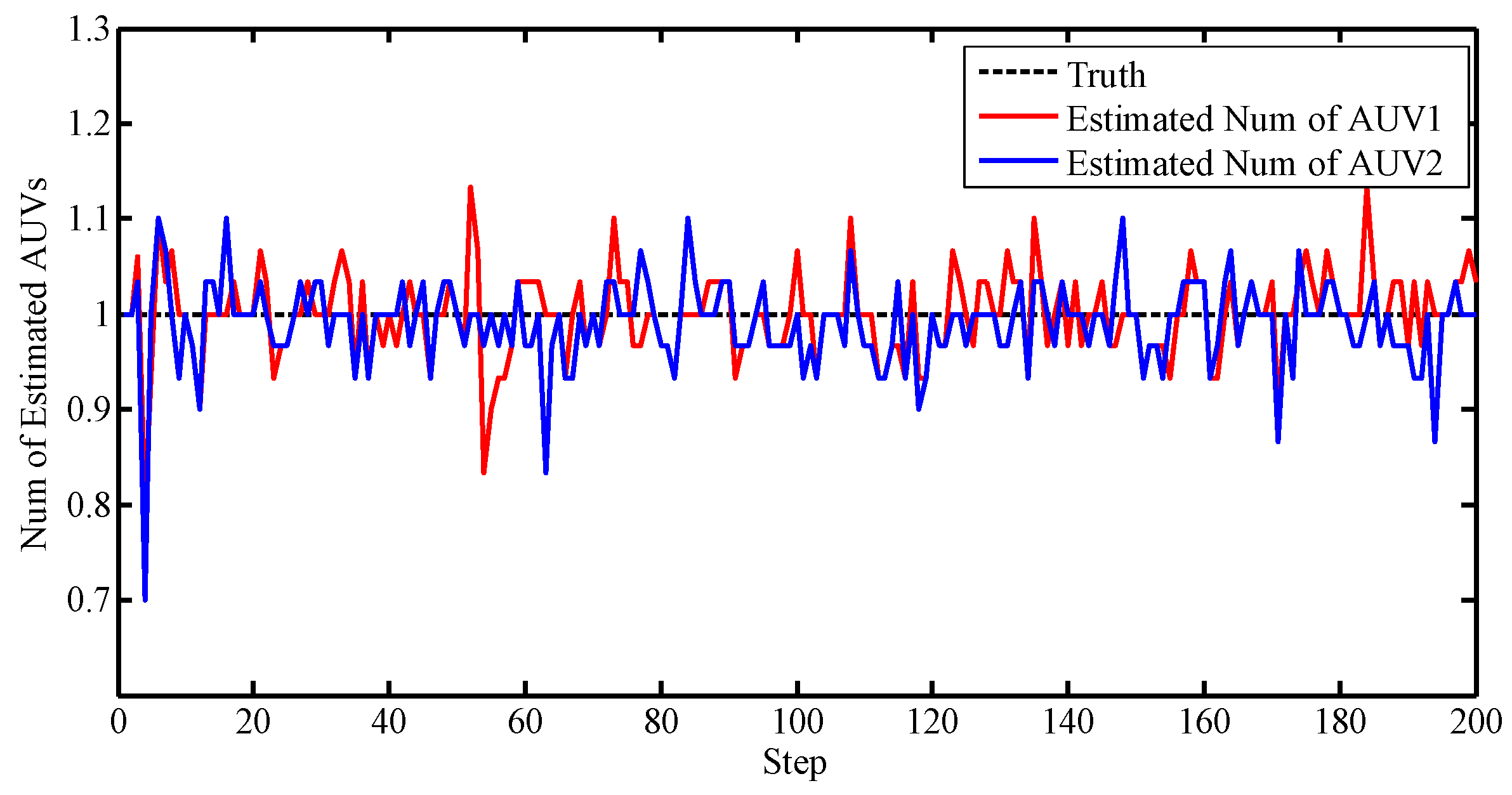
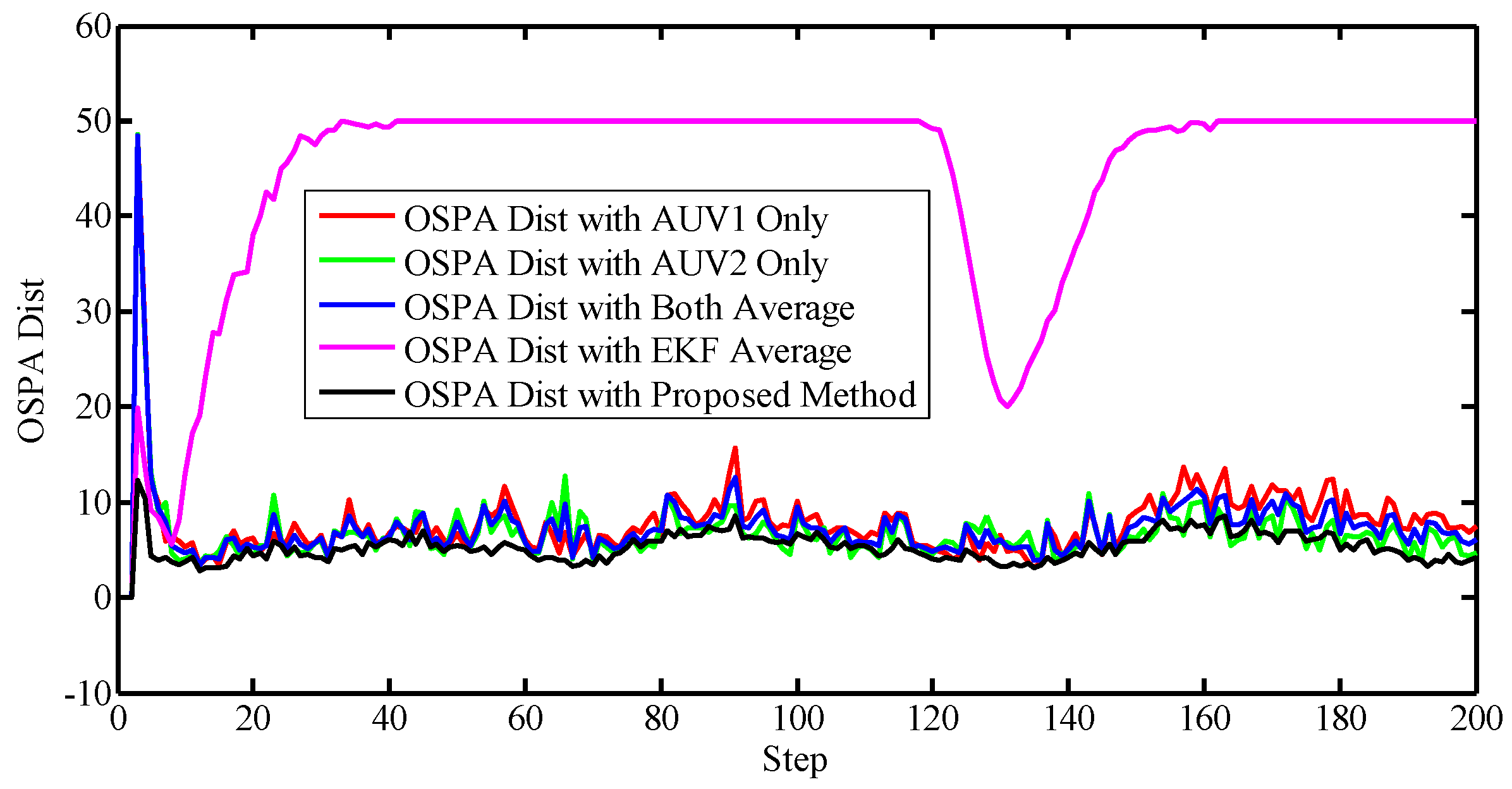
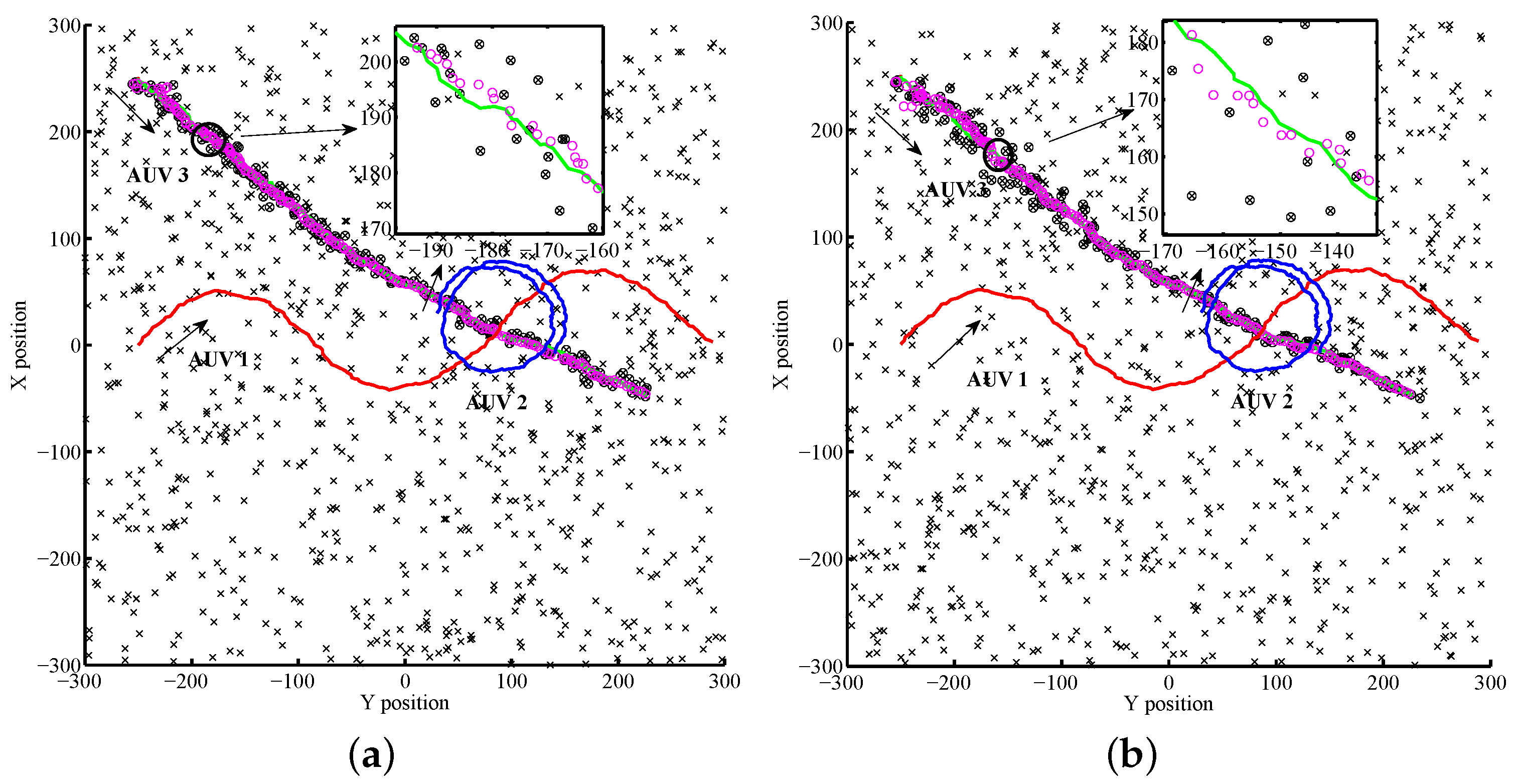
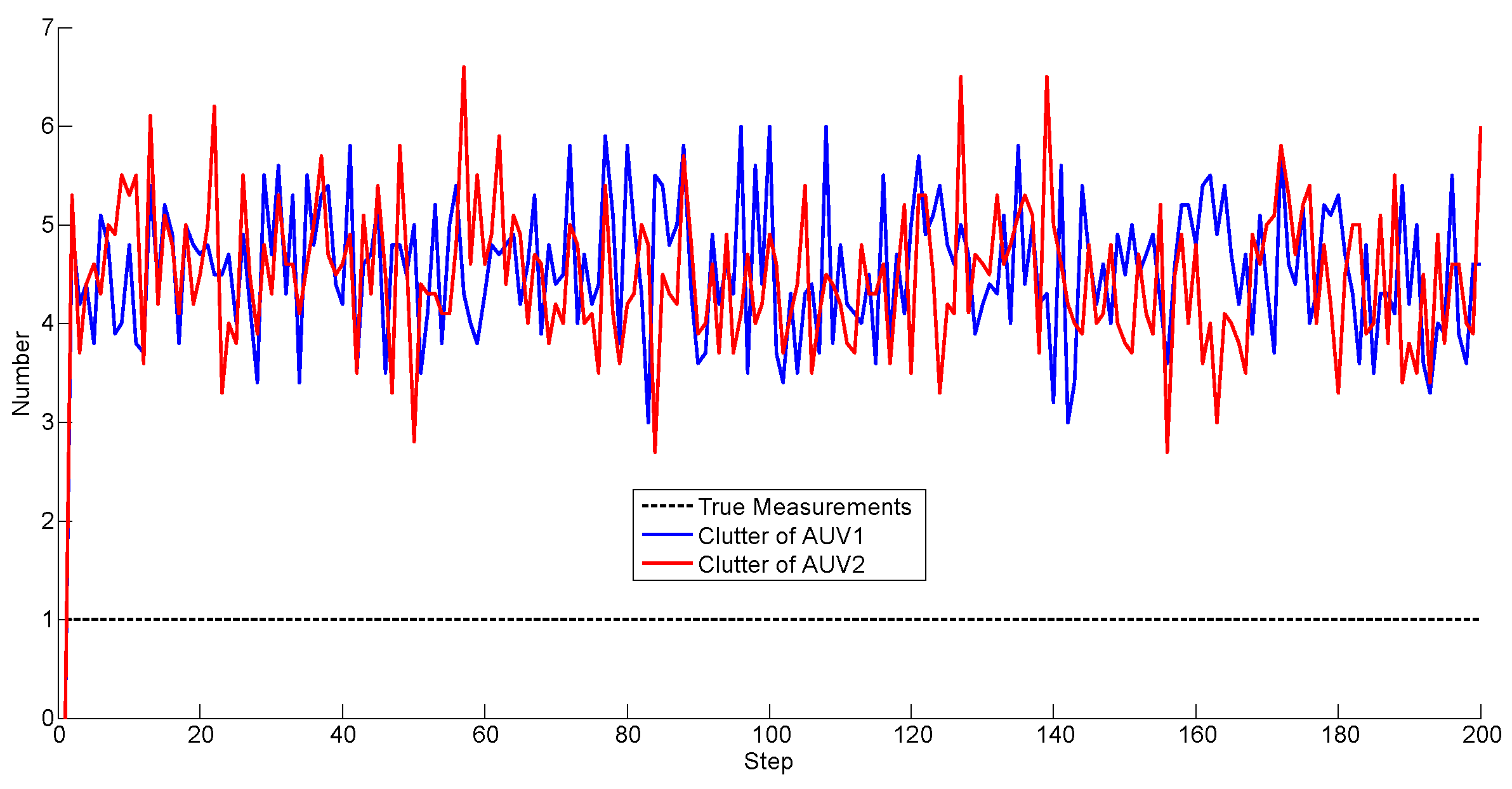
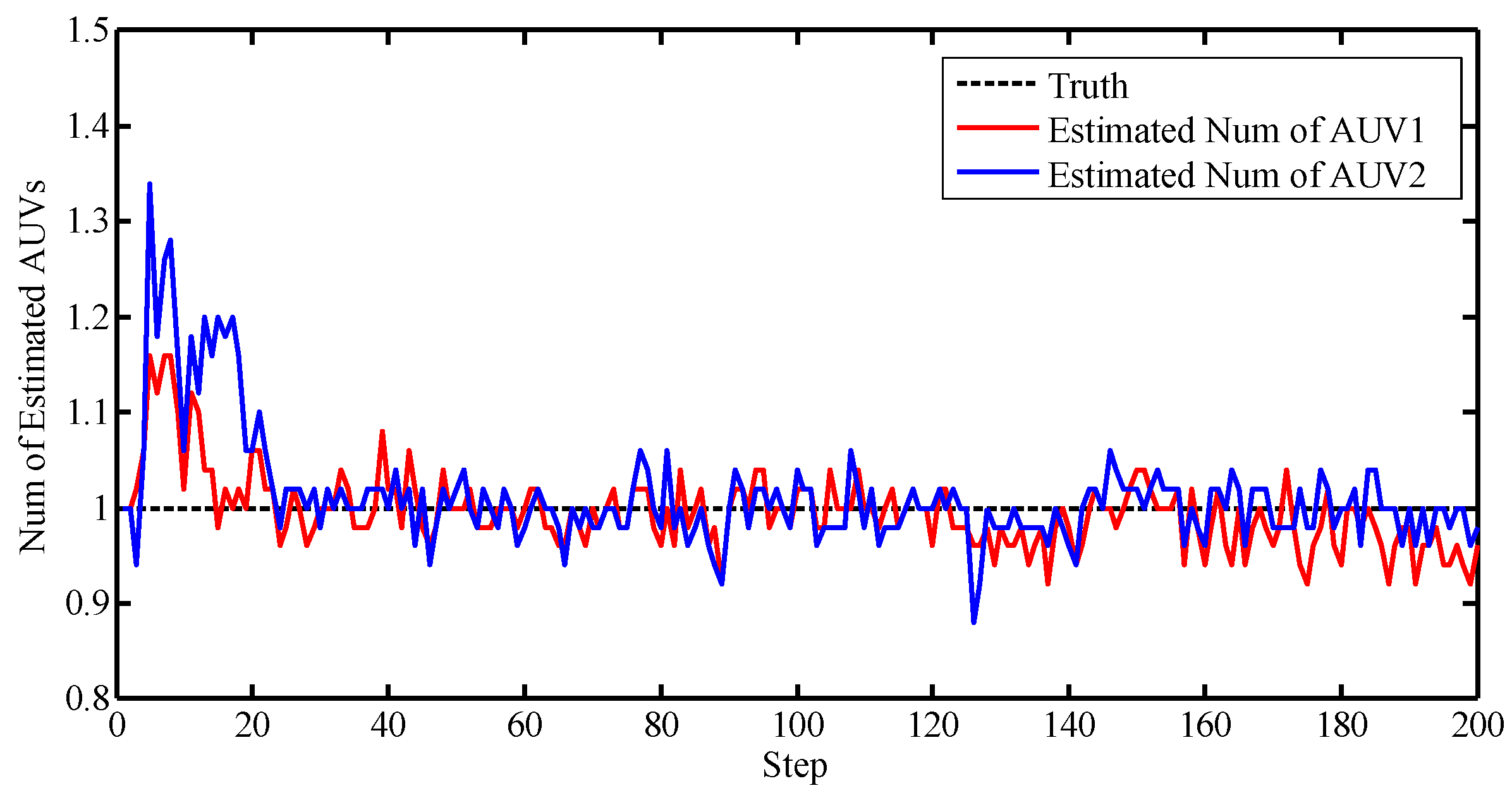
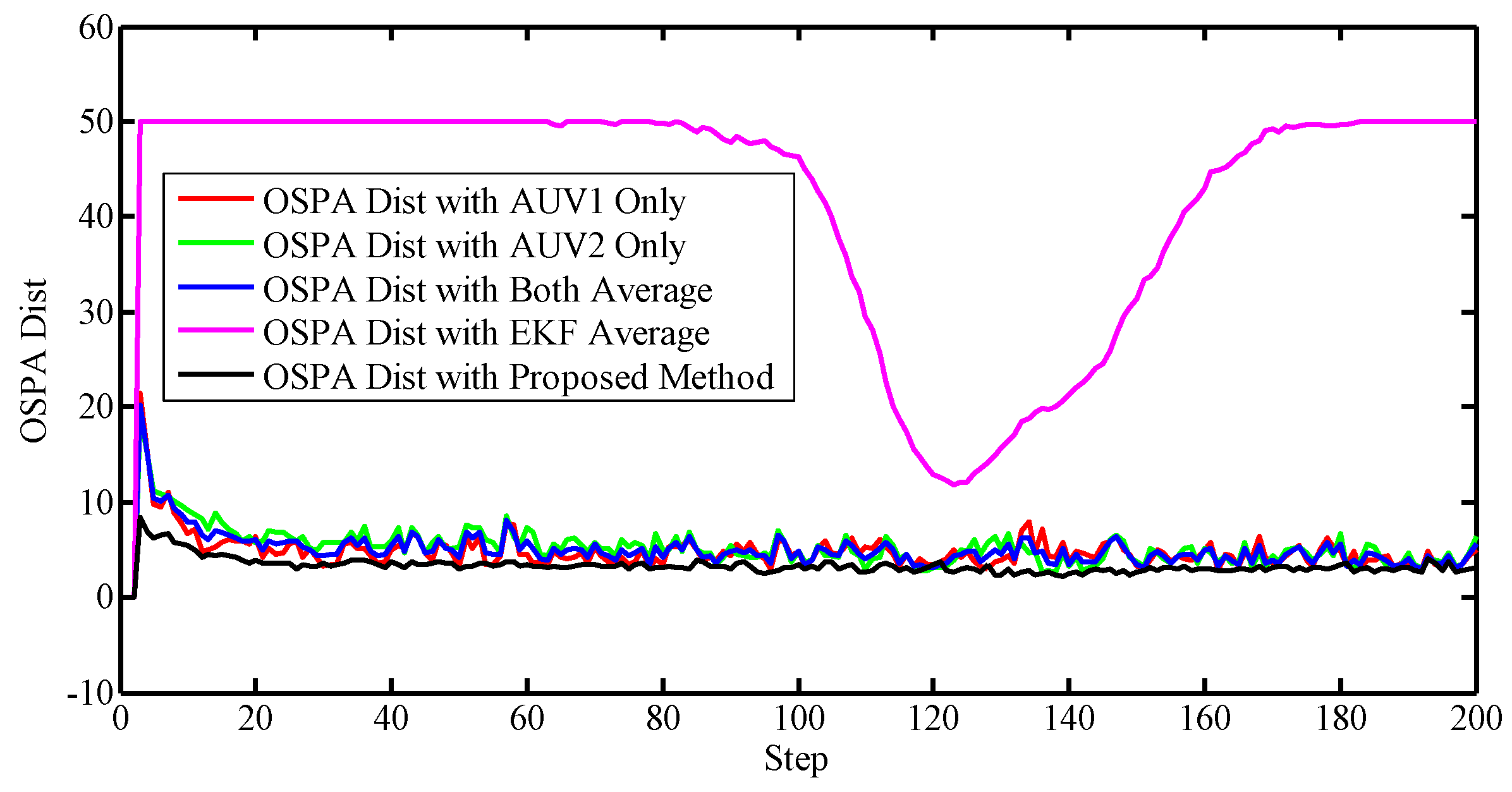
4. Simulation and Results
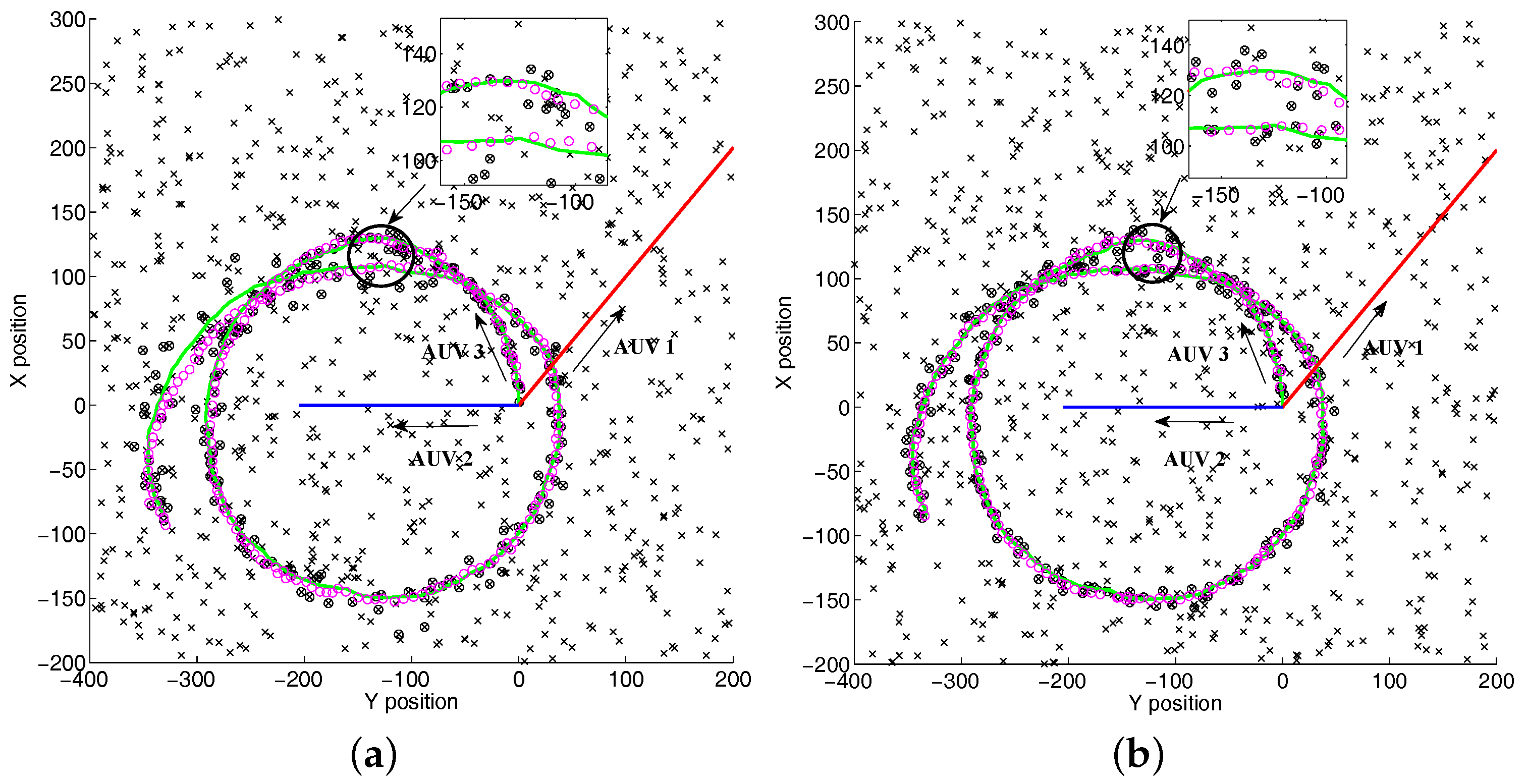
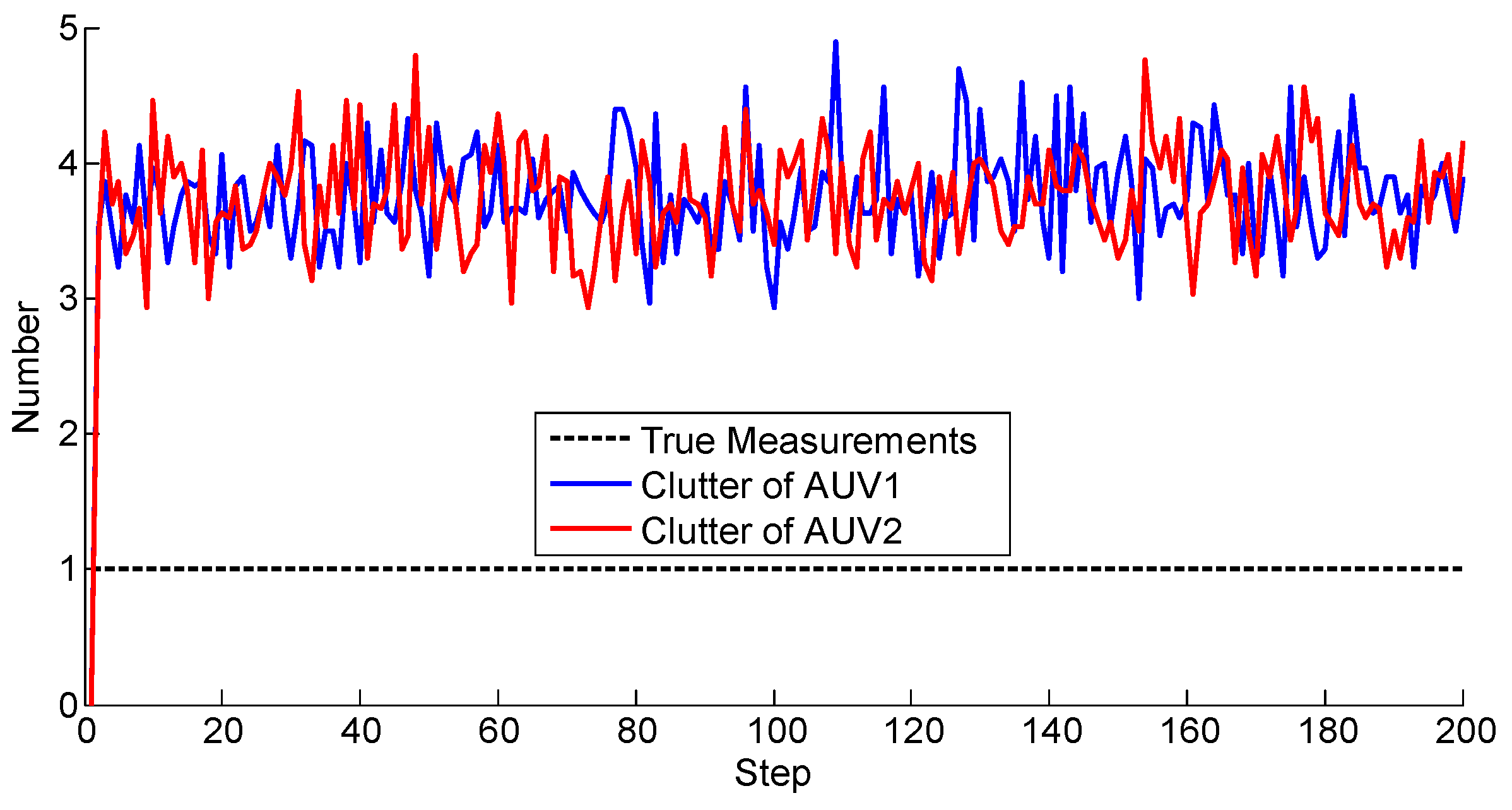
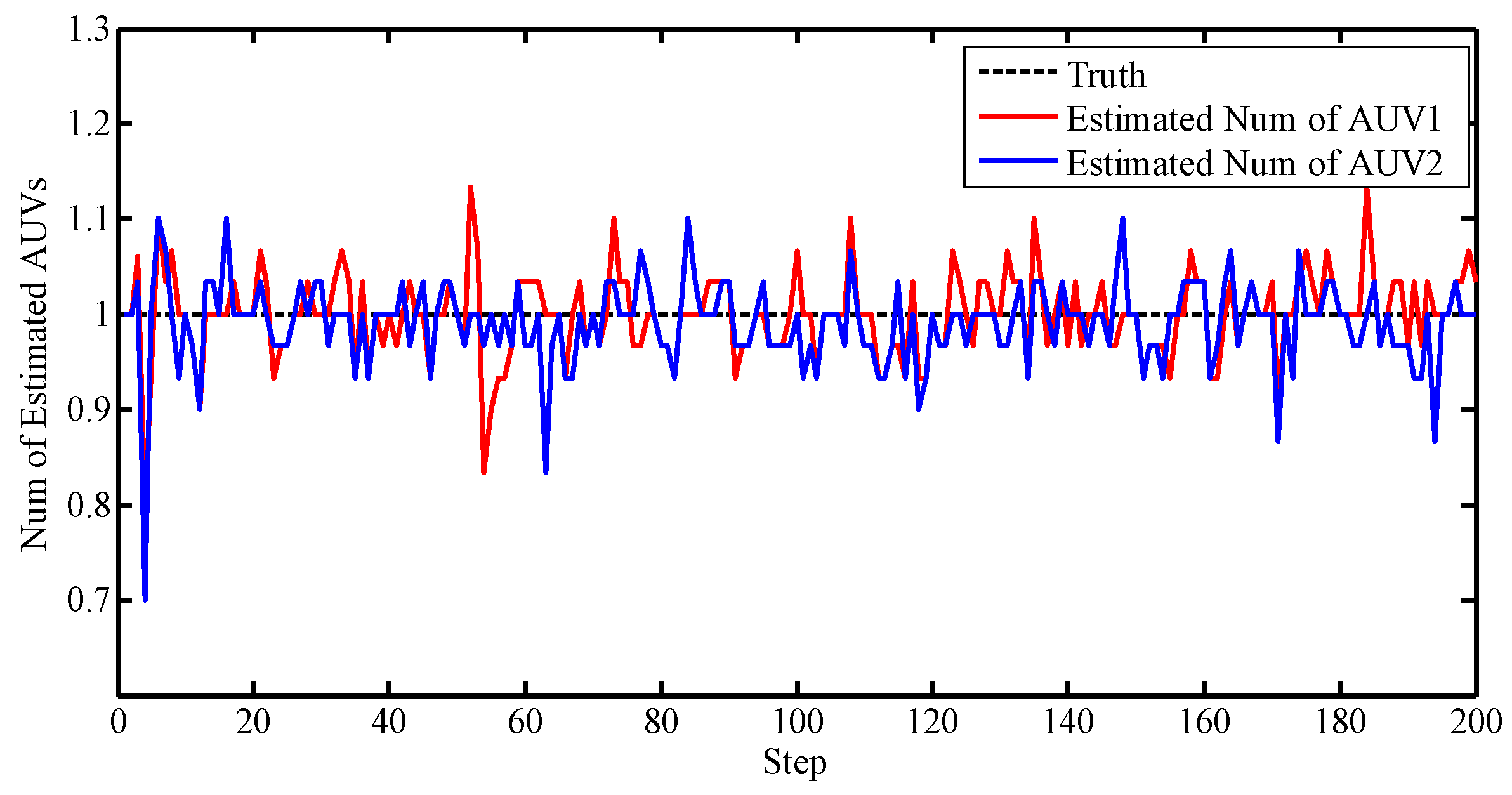
Scenario 1:
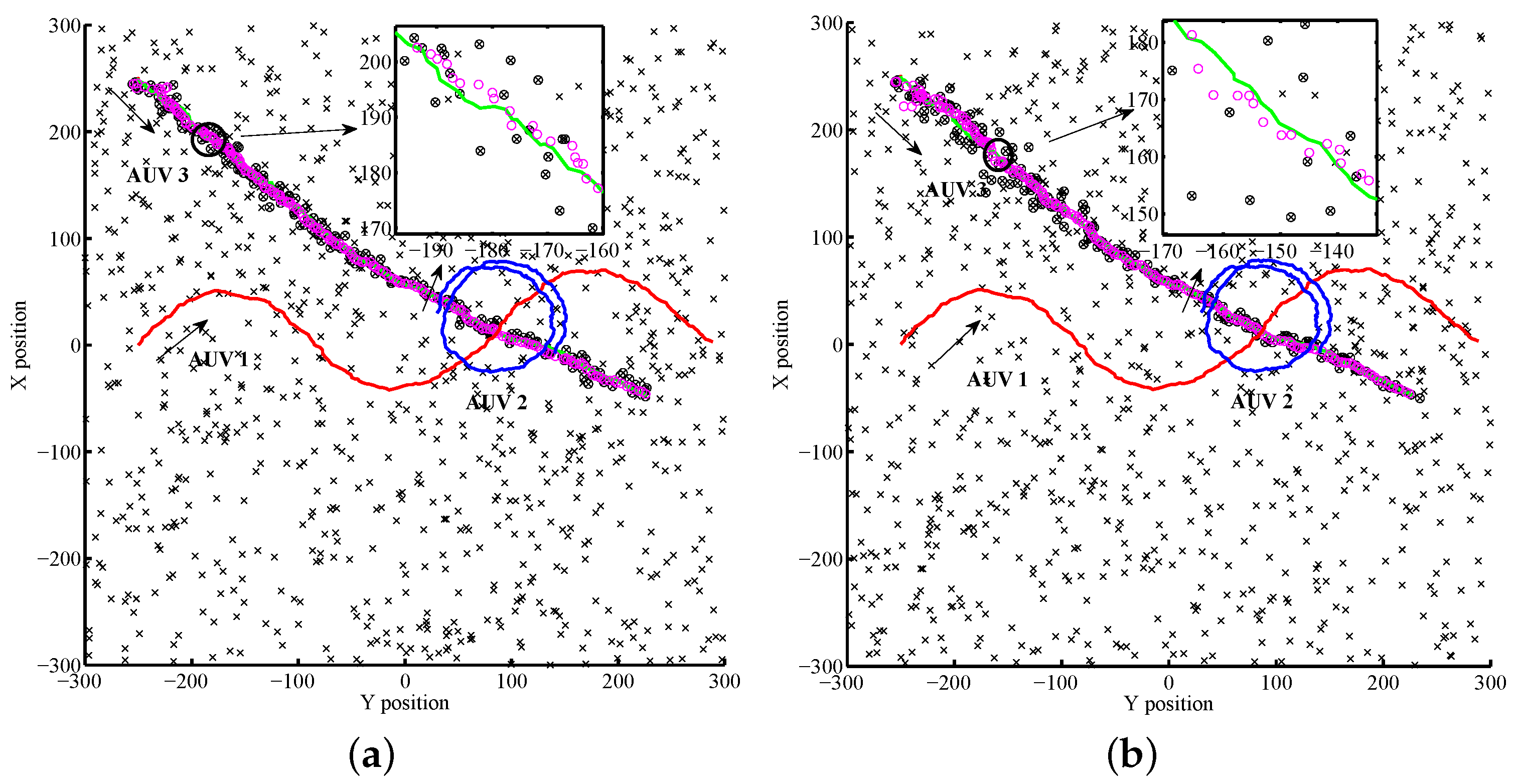
Scenario 2:
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Huang, Y.; Hao, Y. Method of separating dipole magnetic anomaly from geomagnetic field and application in underwater vehicle localization. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 1357–1362. [Google Scholar]
- Matos, A.; Cruz, N.; Martins, A.; Lobo Pereira, F. Development and implementation of a low-cost LBL navigation system for an AUV. In Proceedings of the OCEANS ’99 MTS/IEEE, Seattle, WA, USA, 13–16 September 1999; Volume 2, pp. 774–779. [Google Scholar]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Allotta, B.; Bartolini, F.; Caiti, A.; Costanzi, R.; Di Corato, F.; Fenucci, D.; Gelli, J.; Guerrini, P.; Monni, N.; Munafò, A.; et al. Typhoon at CommsNet13: Experimental experience on AUV navigation and localization. Annu. Rev. Control 2015, 40, 157–171. [Google Scholar] [CrossRef]
- Stachniss, C.; Leonard, J.J.; Thrun, S. Simultaneous Localization and Mapping. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 1153–1176. [Google Scholar]
- Allotta, B.; Pugi, L.; Costanzi, R.; Vettori, G. Localization algorithm for a fleet of three AUVs by INS, DVL and range measurements. In Proceedings of the 2011 15th International Conference on Advanced Robotics (ICAR), Tallinn, Estonia, 20–23 June 2011; pp. 631–636. [Google Scholar]
- Karimi, M.; Bozorg, M.; Khayatian, A. A comparison of DVL/INS fusion by UKF and EKF to localize an autonomous underwater vehicle. In Proceedings of the 2013 First RSI/ISM International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 13–15 February 2013; pp. 62–67. [Google Scholar]
- Huang, G.P.; Trawny, N.; Mourikis, A.I.; Roumeliotis, S.I. Observability-based consistent EKF estimators for multi-robot cooperative localization. Auton. Robots 2011, 30, 99–122. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, J.; Wang, T.; Liu, M.; Gao, J. Optimal formation of multiple AUVs cooperative localization based on virtual structure. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar]
- Rui, G.; Chitre, M. Cooperative multi-AUV localization using distributed extended information filter. In Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, Japan, 6–9 November 2016; pp. 206–212. [Google Scholar]
- Nerurkar, E.D.; Roumeliotis, S.I. Asynchronous Multi-Centralized Cooperative Localization. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Nerurkar, E.D.; Roumeliotis, S.I. A communication-bandwidth-aware hybrid estimation framework for multi-robot cooperative localization. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 1418–1425. [Google Scholar]
- Nerurkar, E.D.; Zhou, K.X.; Roumeliotis, S.I. A hybrid estimation framework for cooperative localization under communication constraints. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 502–509. [Google Scholar]
- Ferreira, B.Q.; Gomes, J.; Soares, C.; Costeira, J.P. Collaborative localization of vehicle formations based on ranges and bearings. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016; pp. 1–5. [Google Scholar]
- Zhou, T.; Lu, Y.; Lv, F.; Di, H.; Zhao, Q.; Zhang, J. Abrupt motion tracking via nearest neighbor field driven stochastic sampling. Neurocomputing 2015, 165, 350–360. [Google Scholar] [CrossRef]
- Konstantinova, P.; Udvarev, A.; Semerdjiev, T. A study of a target tracking algorithm using global nearest neighbor approach. In Proceedings of the International Conference on Computer Systems and Technologies (CompSysTech ’03), Rousse, Bulgaria, 19–20 June 2003; pp. 290–295. [Google Scholar]
- Fitzgerald, R. Track biases and coalescence with probabilistic data association. IEEE Trans. Aerosp. Electr. Syst. 1985, AES-21, 822–825. [Google Scholar] [CrossRef]
- Blackman, S.S. Multiple hypothesis tracking for multiple target tracking. IEEE Aerosp. Electr. Syst. Mag. 2004, 19, 5–18. [Google Scholar] [CrossRef]
- Chenouard, N.; Bloch, I.; Olivo-Marin, J.C. Multiple hypothesis tracking for cluttered biological image sequences. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2736–3750. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Buckl, C.; Knoll, A. Multiple Vehicle Cooperative Localization with Spatial Registration Based on a Probability Hypothesis Density Filter. Sensors 2014, 14, 995–1009. [Google Scholar] [CrossRef] [PubMed]
- Goli, A.S.; Far, H.B.; Fapojuwo, O.A. Cooperative Multi-sensor Multi-vehicle Localization in Vehicular Adhoc Networks. In Proceedings of the 2015 IEEE International Conference on Information Reuse and Integration, San Francisco, CA, USA, 13–15 August 2015; pp. 142–149. [Google Scholar]
- Feng, P.; Wang, W.; Dlay, S.; Naqvi, S.M.; Chambers, J. Social Force Model-Based MCMC-OCSVM Particle PHD Filter for Multiple Human Tracking. IEEE Trans. Multimedia 2017, 19, 725–739. [Google Scholar] [CrossRef]
- Zhou, X.; Li, Y.; He, B.; Bai, T. GM-PHD-Based Multi-Target Visual Tracking Using Entropy Distribution and Game Theory. IEEE Trans. Ind. Inform. 2014, 10, 1064–1076. [Google Scholar] [CrossRef]
- Zhou, X.; Zhang, Y.; Hao, S.; Li, S. A new approach for noise data detection based on cluster and information entropy. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 1416–1419. [Google Scholar]
- Zou, G.; Ma, L.; Zhang, L.; Mo, L. An indoor positioning algorithm using joint information entropy based on WLAN fingerprint. In Proceedings of the 2014 International Conference on Computing, Communication and Networking Technologies (ICCCNT), Hefei, China, 11–13 July 2014; pp. 1–6. [Google Scholar]
- Mocnej, J.; Lojka, T.; Zolotov, T. Using information entropy in smart sensors for decentralized data acquisition architecture. In Proceedings of the 2016 IEEE 14th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herlany, Slovakia, 21–23 January 2016; pp. 47–50. [Google Scholar]
- Guo, X.; Liu, X.; Chen, G.; Chang, L.; Li, X. Missile weapon system-of-systems optimization method based on information entropy. In Proceedings of the 2016 International Conference on Computer, Information and Telecommunication Systems (CITS), Kunming, China, 6–8 July 2016; pp. 1–5. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons Inc.: Chichest, UK; New York, NY, USA; Brisbane, Australia; Toronto, Canada; Singapore, 1994. [Google Scholar]
- Lapierre, L.; Jouvencel, B. Robust nonlinear path-following control of an AUV. IEEE J. Ocean. Eng. 2008, 33, 89–102. [Google Scholar] [CrossRef]
- Mahler, R.P.S. “Statistics 101” for multisensor, multitarget data fusion. IEEE Aerosp. Electr. Syst. Mag. 2004, 19, 53–64. [Google Scholar] [CrossRef]
- Mahler, R. “Statistics 102” for Multisource-Multitarget Detection and Tracking. IEEE J. Sel. Top. Signal Process. 2013, 7, 376–389. [Google Scholar] [CrossRef]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A Consistent Metric for Performance Evaluation of Multi-Object Filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef]
- Arrichiello, F.; Antonelli, G.; Aguiar, A.P.; Pascoal, A. Observability metric for the relative localization of AUVs based on range and depth measurements: Theory and experiments. Proceeding of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 3166–3171. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard PHD Filter (s) | Proposed Method (s) | Increased Percentage (%) | |
|---|---|---|---|
| Scenario 1 | 211.602 | 229.887 | 8.64 |
| Scenario 2 | 247.366 | 267.481 | 8.13 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Wang, T.; Zhang, F.; Xu, D. Cooperative Localization for Multi-AUVs Based on GM-PHD Filters and Information Entropy Theory. Sensors 2017, 17, 2286. https://doi.org/10.3390/s17102286
Zhang L, Wang T, Zhang F, Xu D. Cooperative Localization for Multi-AUVs Based on GM-PHD Filters and Information Entropy Theory. Sensors. 2017; 17(10):2286. https://doi.org/10.3390/s17102286
Chicago/Turabian StyleZhang, Lichuan, Tonghao Wang, Feihu Zhang, and Demin Xu. 2017. "Cooperative Localization for Multi-AUVs Based on GM-PHD Filters and Information Entropy Theory" Sensors 17, no. 10: 2286. https://doi.org/10.3390/s17102286
APA StyleZhang, L., Wang, T., Zhang, F., & Xu, D. (2017). Cooperative Localization for Multi-AUVs Based on GM-PHD Filters and Information Entropy Theory. Sensors, 17(10), 2286. https://doi.org/10.3390/s17102286