3.3.1. Theoretical Deduction of Extended SFSE ADOP for Short Baseline
According to Equation (10), the traditional ADOP expression is complicated, and at the same time
is a power exponential function of m and
. To simplify Equation (10), we take the logarithmic function based on
e for Equation (10), and combine it with Equation (11):
where
based on Equation (4).
As is well known, high-elevation satellites have their own advantages. Namely, the observation of high-elevation satellite is less affected by multipath and ionosphere than that of low-elevation satellite which makes its observation accuracy higher than accuracy of low-elevation satellite. Hence, a large proportion of high-elevation satellites can improve system reliability which is important to improve ambiguity success rate. In Equation (14), only factor is related to satellite elevation which means it is an important factor for ADOP. Thus, is defined as the Summation-Multiplication Ratio of Weight (SMRW).
The SMRW has two important properties based on the condition that .
Theorem 1. The SMRW becomes larger when new satellites (s = m + 1, m + 2, …, z) are added to SMRW, and the magnification is greater for times.
Theorem 2. For and , if , when s = i (i = 1, 2, …, m) after ws and wi are sorted from small to large, respectively, is less than or equal to .
The proofs of Theorems 1 and 2 are provided in
Appendix A.
Consequently, Equation (14) can be rewritten:
where
is called the Extend ADOP (E-ADOP), namely
which is proportional to ADOP.
Let
,
and
, then Equation (15) can be rewritten:
Supposing
,
and
, for ADOP, the
is the multivariate power exponential function of
and
and the
is the exponential function of
. In E-ADOP, the
and
in
are separated, namely the
is broken down into
and
.
is equal to
and
is the logarithmic function of
. In E-ADOP, the
in ADOP is broken down into
and
which is equal to
. Hence, the expression of E-ADOP makes the expression of ADOP which is the product of complex functions as the product of simple functions, which changes the dependence of ADOP and E-ADOP on
and SMRW. This change also makes E-ADOP expression more concise and intuitive and the expression of E-ADOP gives a clearer insight into the influences of number of satellites and SMRW on E-ADOP, which will make the theoretical analysis of E-ADOP more convenient than ADOP. The important property of E-ADOP is that the mean E-ADOP value can be predicted more accurately by the mean value of parameters through the expression of E-ADOP than through the ADOP expression for mean ADOP value, which is important for prediction of a new E-ADOP when some satellites are added based on Theorem 1 (see Proof 3 in
Appendix A).
When the system and carrier phase are set, then and are confirmed, which makes a constant and E-ADOP a dependent variable that is only related to ADOP and it is proportional to ADOP. The variables α and β are independent and they are related to the number of satellites and SMRW or satellite-elevation, respectively. Therefore, when the system and carrier phase are set, the E-ADOP is only the function of number of satellites and satellite elevation or SMRW.
3.3.2. The Main Factors of SFSE E-ADOP for Short Baseline
Based on E-ADOP and Theorems 1 and 2, we analyze which factor, the number of satellites or SMRW, is dominant to control SFSE E-ADOP for short baseline.
Based on
Table 1, for
and
, the mean value of
and
is used in the next analysis, namely
. Superscript b and g represent BDS and GPS, respectively. Hence, Equation (16) becomes:
The relations between E-ADOP, number of satellites and satellite elevation were analyzed.
The setting was as follows: one low- or high-elevation satellite or two low- or high-elevation satellites were, respectively, added to three groups of satellites to explore the influence of number of satellites and SMRW on E-ADOP. Each group of satellites consists of
satellites which includes two kinds of satellites: one contains
satellites whose elevations are all 10° and another contains
same elevation satellites whose elevations are higher than those of
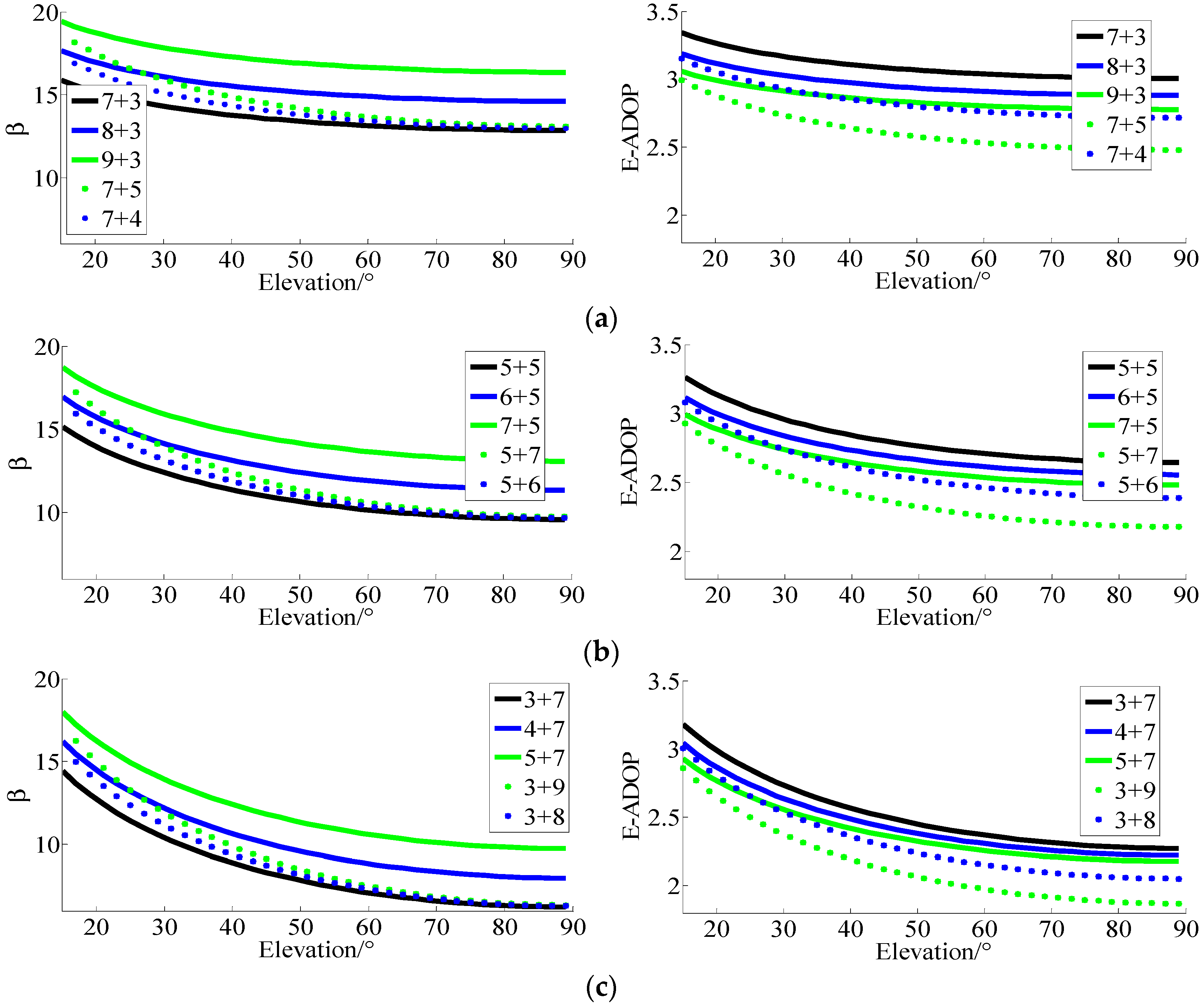
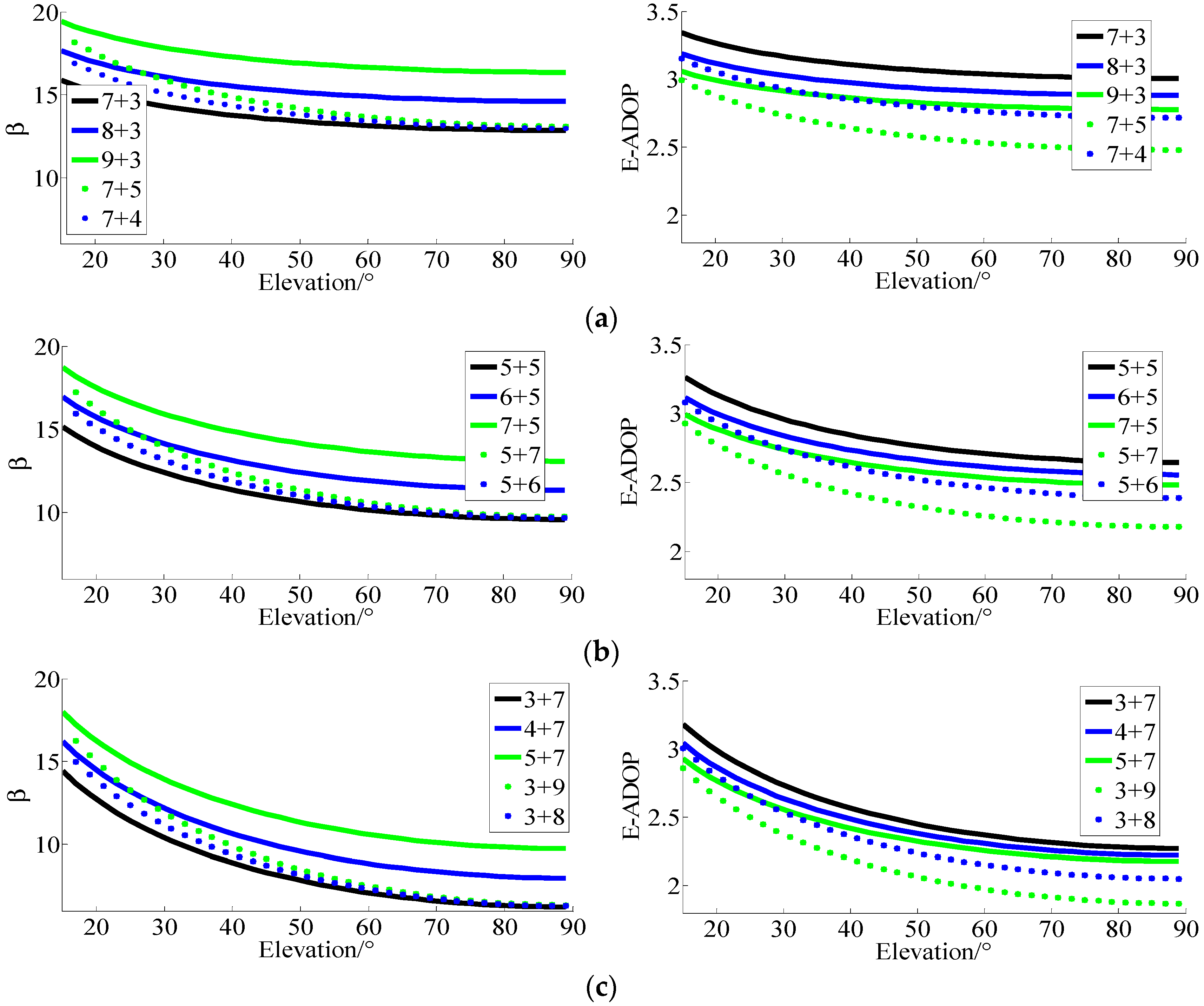
satellites. Three groups of satellites were: (7 + 3), wherein the low-elevation satellites were majority, and results are shown in
Figure 1a; (5 + 5), namely the low- and high-elevation satellites were equally distributed, and results are shown in
Figure 1b; and (3 + 7), namely the high-elevation satellites were the majority, and results are shown in
Figure 1c. In the result, the elevation of
same elevation satellites was taken as
-axis, such as 15°, 20°, …, 90°.
In
Figure 1, when a low-elevation satellite or two low-elevation satellites are added to three groups of satellites,
β becomes larger and the more low-elevation satellites are added, the larger
β is, which is consistent with Theorem 1. However, the corresponding E-ADOP is the opposite: the more low-elevation satellites are added, the smaller the E-ADOP is, even though
β becomes larger. Therefore, based on Equation (17), the number of satellites is the dominant factor to control of E-ADOP when low-elevation satellites are added.
When a high-elevation satellite or two high-elevation satellites are added to three groups of ten satellites, β also becomes larger, which is consistent with the Theorem 1. The corresponding E-ADOP is the same as the E-ADOP when low-elevation satellites are added. Thus, based on Equation (17), the number of satellites is also the dominant factor to control of E-ADOP when high-elevation satellites are added.
However, differences in
β between dotted lines and black solid line are much smaller than the differences between the black solid line and another color solid lines as the elevations of
n2 satellites become larger or the proportion of high-elevation satellites becomes larger, which make the E-ADOP of dotted lines much smaller than those of the corresponding solid lines; furthermore, when the number of satellites is constant, the higher the number of high-elevation satellite is, the smaller
β and E-ADOP are, in
Figure 1. The above phenomena show that SMRW (high-elevation satellites) plays an important role in E-ADOP decrease.
Comparing green solid line and the corresponding blue dotted line in
Figure 1, we can see that
β of blue dotted line is much smaller than that of the corresponding green solid line, while the E-ADOP of blue dotted line is also smaller than that of the corresponding green solid line when the elevation of
n2 satellites is larger than about 30°, although the number of satellites of green solid line is larger than corresponding blue dotted line. It is worth noting that the high-elevation satellite proportions of blue dotted line in
Figure 1a–c are 36.36%, 54.55% and 72.73%, respectively; the high-elevation satellite proportions of green solid line in
Figure 1a–c are 25%, 41.67% and 58.33%, respectively; and the differences in numbers of satellites between blue dotted line and the corresponding green solid line are equal to one, which means that in the case when the difference in number of satellites is not large, the larger the number of high-elevation satellites is, the smaller the E-ADOP value is. Moreover, in this circumstance, SMRW is more dominant than number of satellites in control of E-ADOP. In order to study the influence of a large number of high-elevation satellites on E-ADOP, two simulations were performed. In the first simulation, the total number of satellites was constant, but the proportion of high-elevation satellites was changed. In the second simulation, both the total number of satellites and the proportion of high-elevation satellite number were changed. The obtained results are as follows.
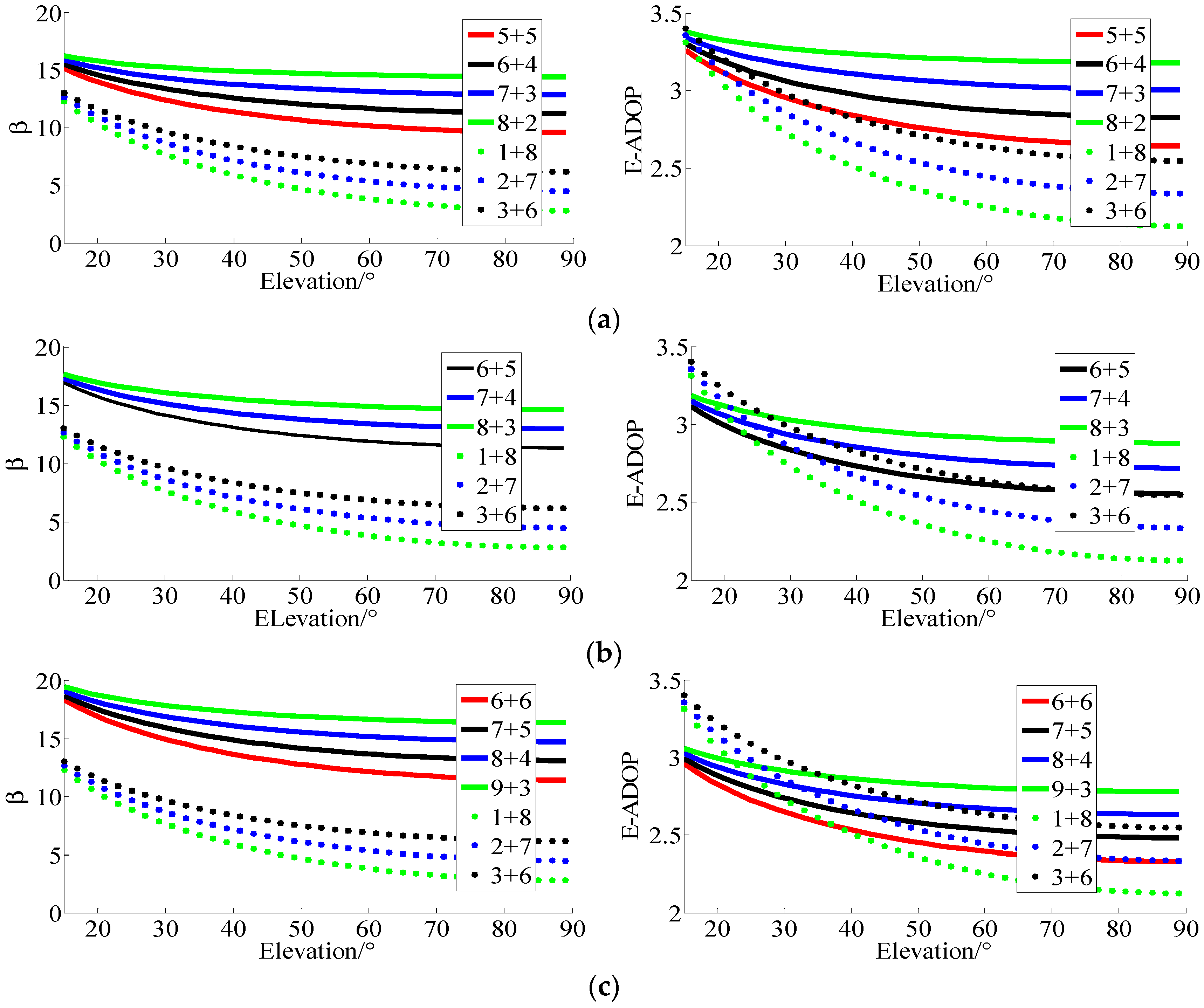
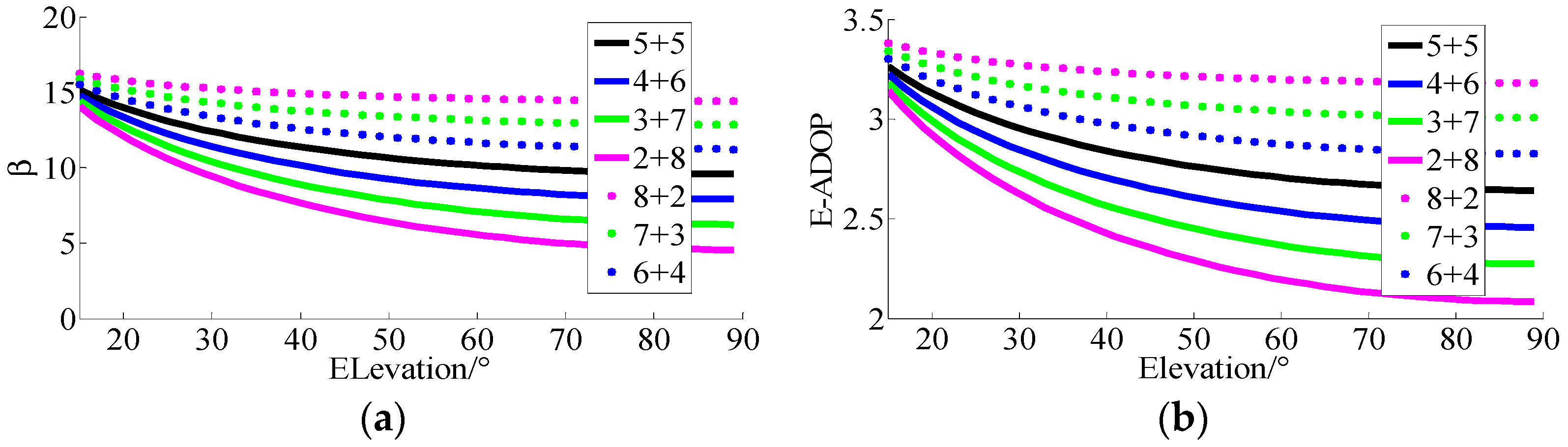
For the first simulation, the results of
β and E-ADOP for
satellites are presented in
Figure 2. In
Figure 2, it can be seen that when the number of satellites is constant, the higher the number of high-elevation satellites is and the larger the elevations of n
2 satellites are, the smaller β and E-ADOP are, which is consistent with Theorem 2. Consequently, when the number of satellites is constant, the greater proportion of high-elevation satellites is, the smaller the SMRW and E-ADOP are. According to Equation (17), in this circumstance, the SMRW is the dominant factor to control of E-ADOP.
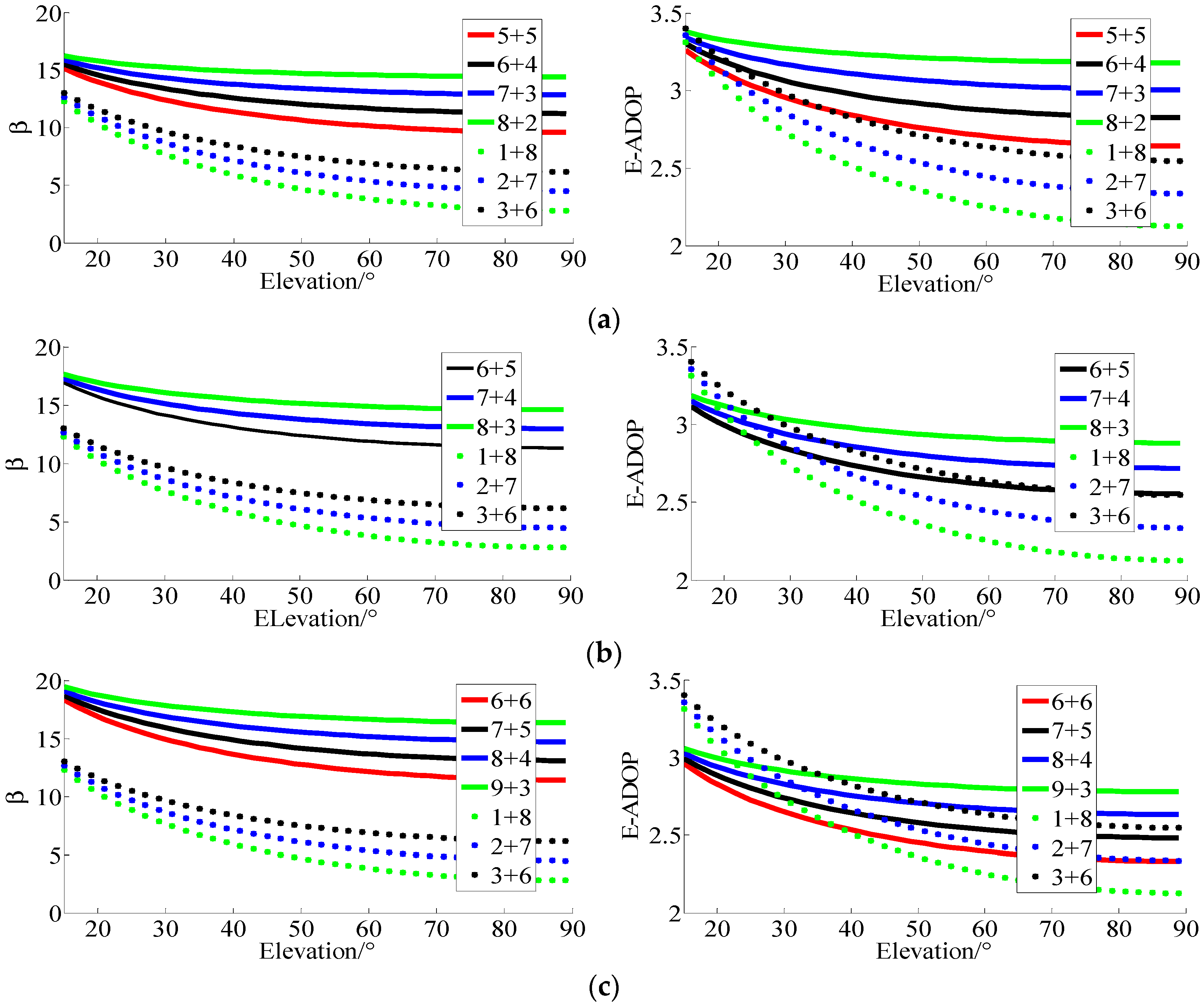
For the second simulation, the results of
β and E-ADOP for
satellites are presented in
Figure 3. The
has four groups. In the first three groups,
are presented by solid lines which mean low-elevation satellites are the majority or low- and high-elevation satellites are equally distributed. The group
is presented by the dotted line, which means high-elevation satellites are the majority, however the difference of number of satellites between the dotted line and solid line is not large. According to
Figure 3a,b, although the numbers of satellites that correspond to the solid lines are larger than those that correspond to the dotted lines, all values of
β of dotted lines are smaller than those of solid lines. At the same time, all values of E-ADOP of dotted lines are always smaller than those of solid lines when their corresponding elevations are larger than a certain level respectively, and, the larger the elevations of high-elevation satellites are, the more obvious the difference is, which is attributed to the large number of high-elevation satellites or SMRW. Therefore, according to Equation (17), we can conclude that, compared to the case where low-elevation satellites are the majority or low- and high-elevation satellites are equally distributed, when the high-elevation satellites are the majority, even if there are fewer satellites than in the first two cases mentioned above, the SMRW is the dominant factor to make E-ADOP smaller. However, the difference in number of satellites between solid line and dotted line is not large.
In
Figure 3c, the results of
β are the same as in
Figure 3a,b. However, in
Figure 3c, the E-ADOP of black dotted line is smaller than those of green and blue solid lines when the elevation is larger than a certain level, but it is larger than those of black and red solid lines. The E-ADOP of blue dotted line is smaller than those of green, blue and black solid lines when the elevation is larger than a certain level, however it is larger than that of red solid line. The E-ADOP of green dotted line is always smaller than those of solid lines when elevation is larger than a certain level. The numbers of high-elevation satellites that correspond to black, blue and green dotted lines are increased in turn. Thus, according to
Figure 3a–c, the difference in number of satellites can be further expanded, as the proportion of high-elevation satellites becomes larger or the elevations of high-elevation satellites become larger.
According to the above analyses, few conclusions can be made: (1) the number of satellites mainly makes E-ADOP smaller when satellites are added; (2) when the number of satellites is constant, the greater the proportion of high-elevation satellites is, the smaller the E-ADOP is, i.e., the SMRW is the dominant factor that makes E-ADOP smaller; and (3) in contrast to the systems where the satellites with low-elevation are the majority or where low- and high-elevation satellites are equally distributed, in the systems where the high-elevation satellites are the majority, the SMRW makes E-ADOP smaller, even if there are fewer satellites than in the previous two cases, however, the difference in number of satellites should not be large and it can be further expanded as the proportion of high-elevation satellites becomes larger or the elevations of high-elevation satellites become larger. Conclusions (1)–(3) apply equally to ADOP.
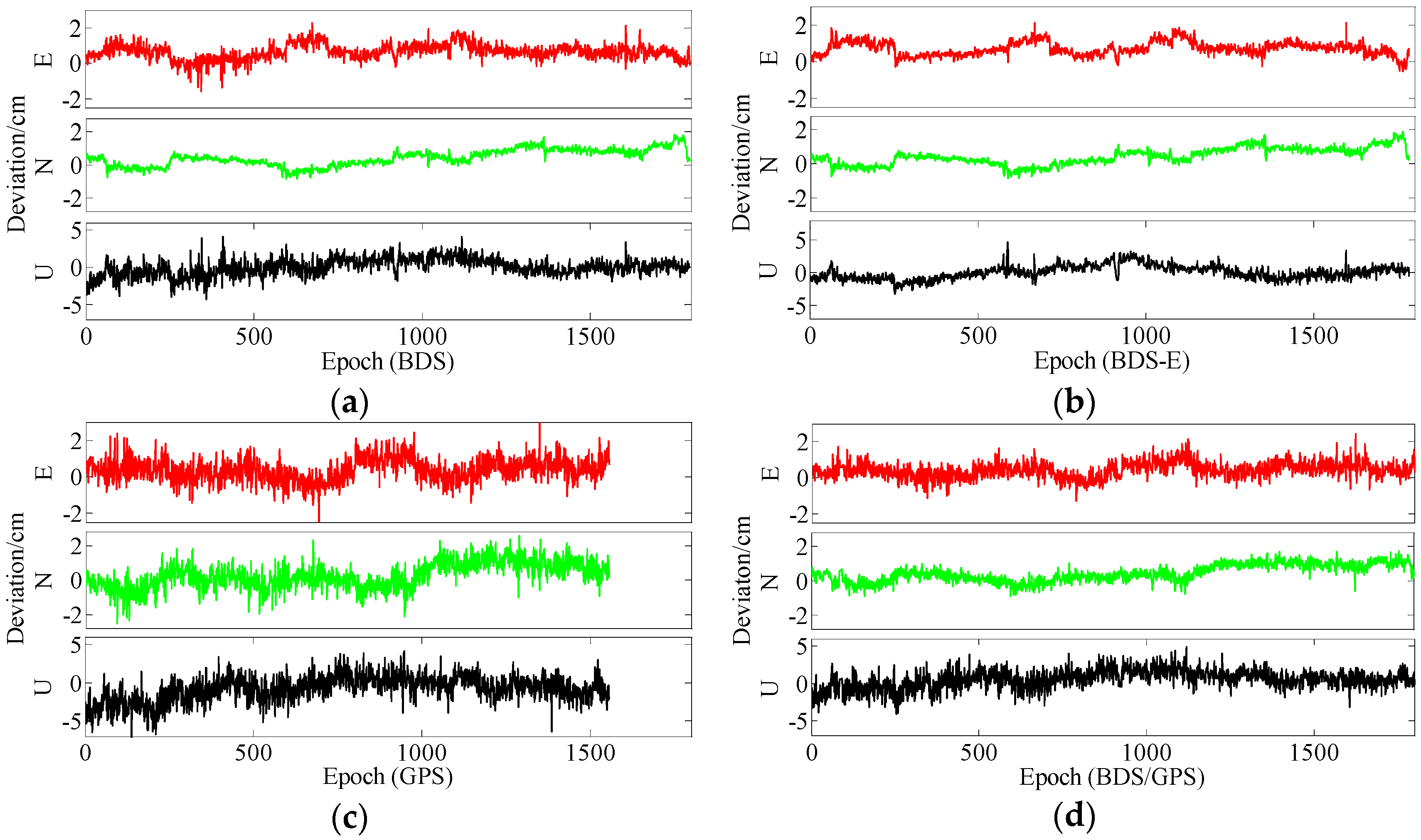
3.3.3. SFSE E-ADOP for Short Baseline Analyses of BDS, GPS and BDS/GPS
In [
10], it was shown that success rate of BDS/GPS is higher than that of a single system and that success rate of BDS is higher than that of GPS, but it was not further studied which factor causes above phenomenon. This section analyzes the main factors for above phenomenon based on E-ADOP, namely the influences of number of satellites and SMRW or number of high-elevation satellites on E-ADOP are analyzed.
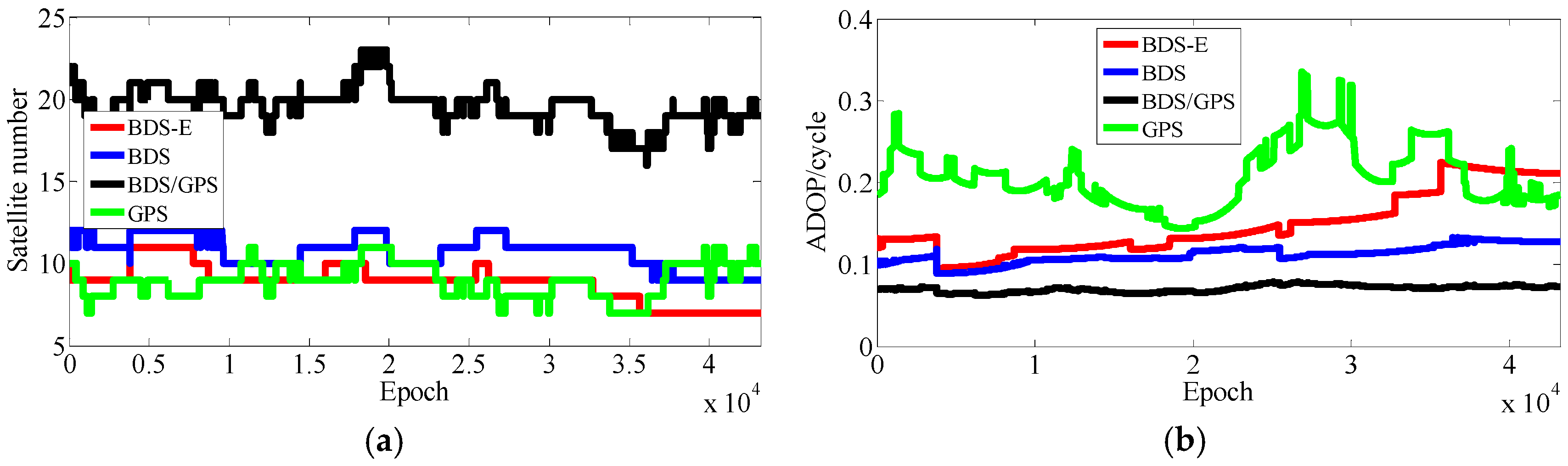
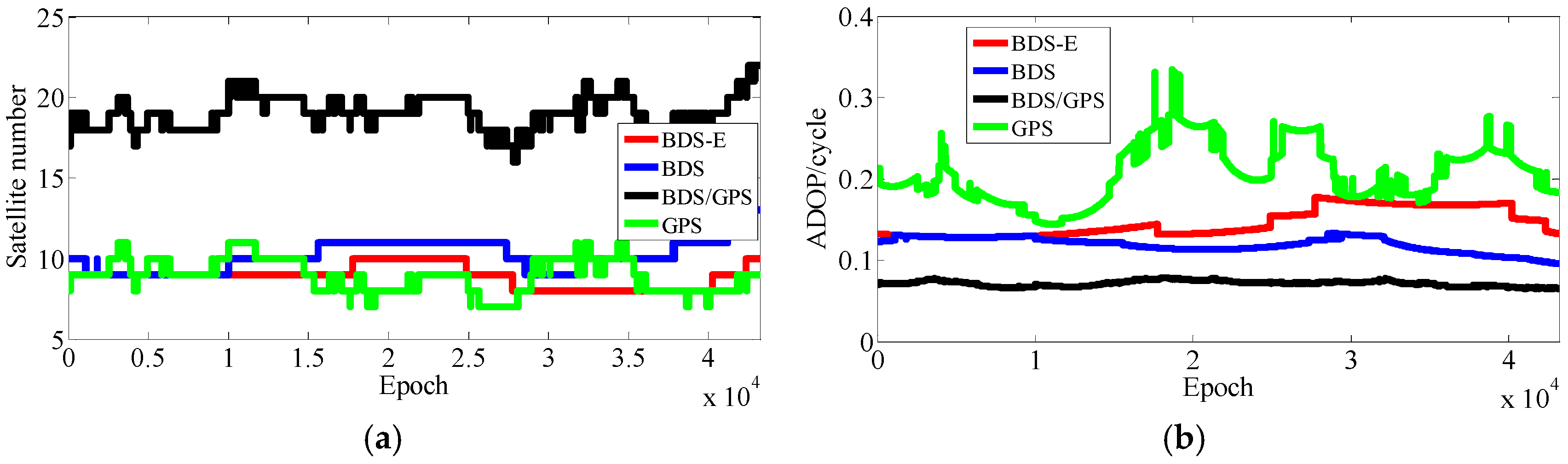
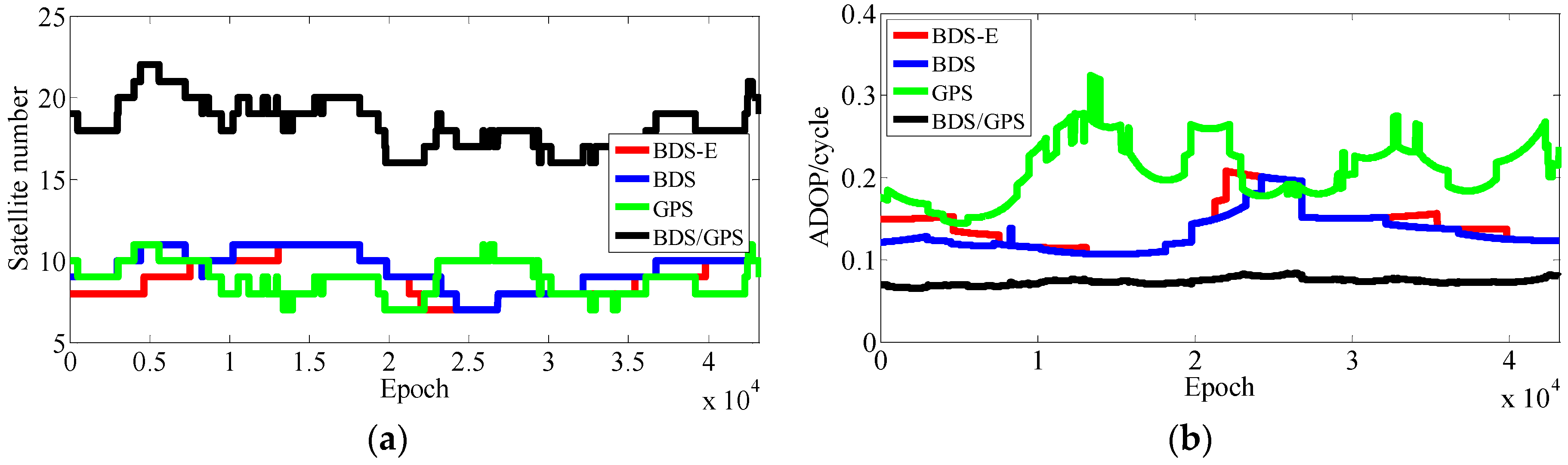
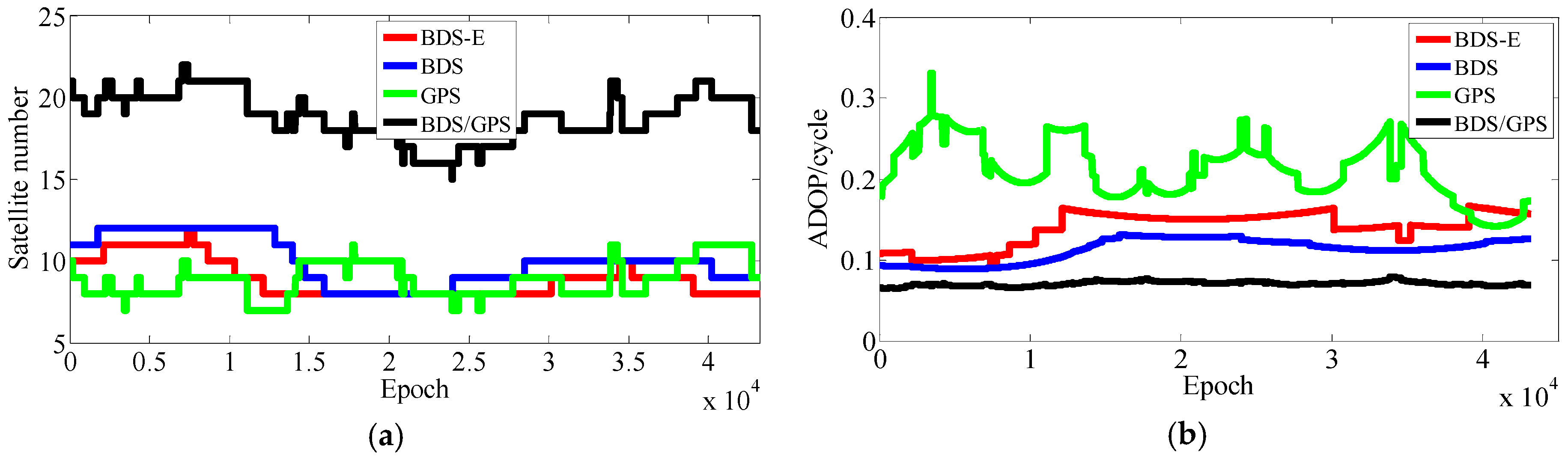
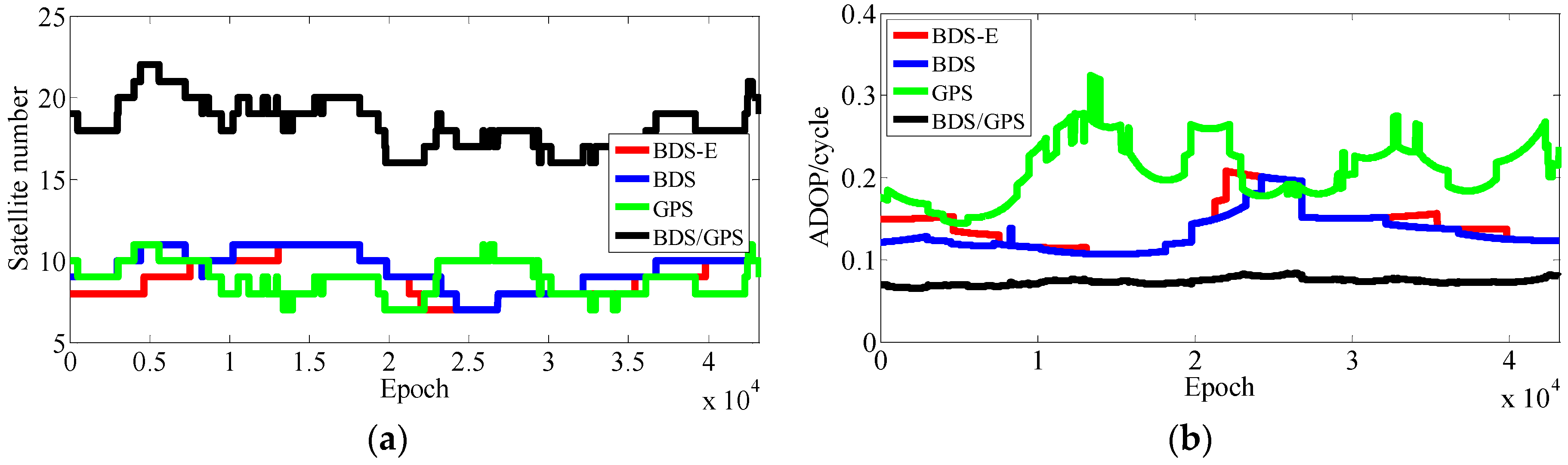
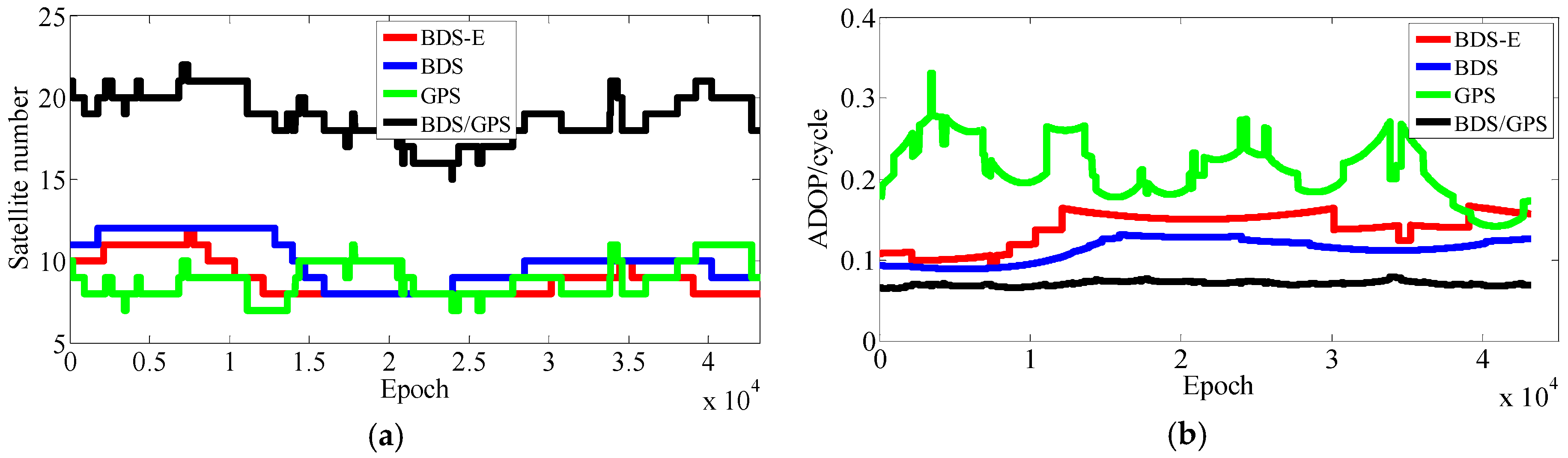
(1) Analysis of number of satellites in BDS/GPS, BDS and GPS
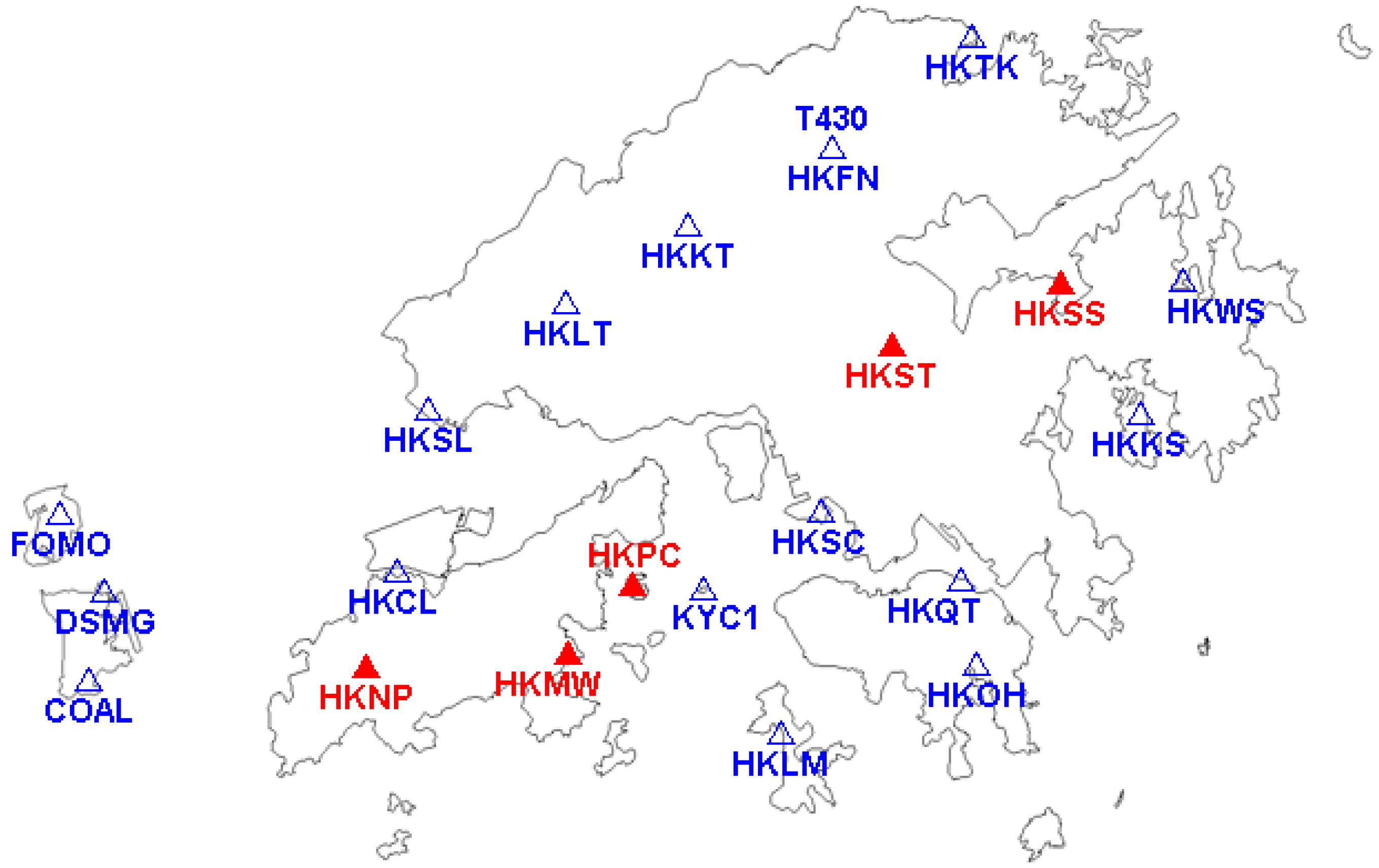
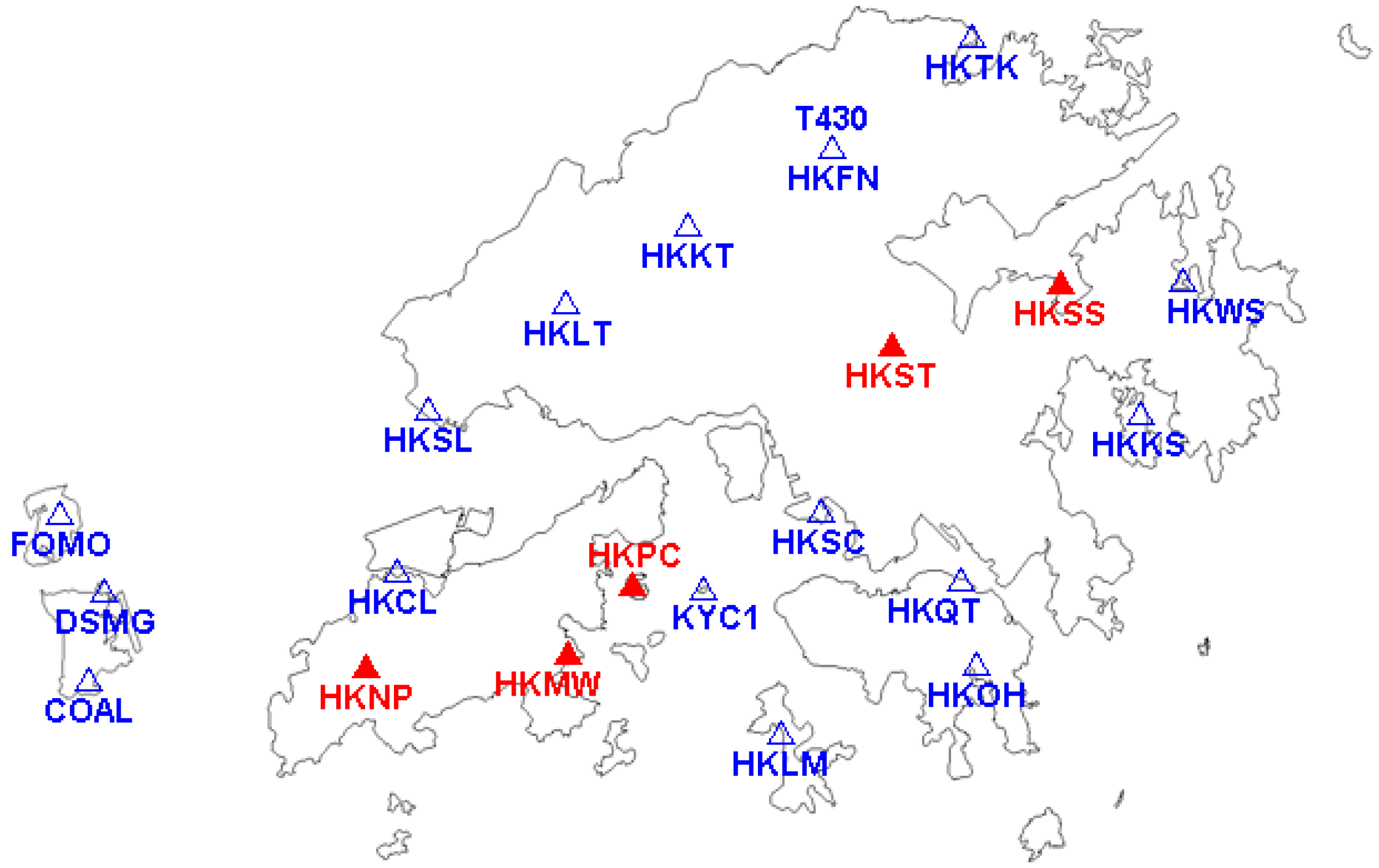
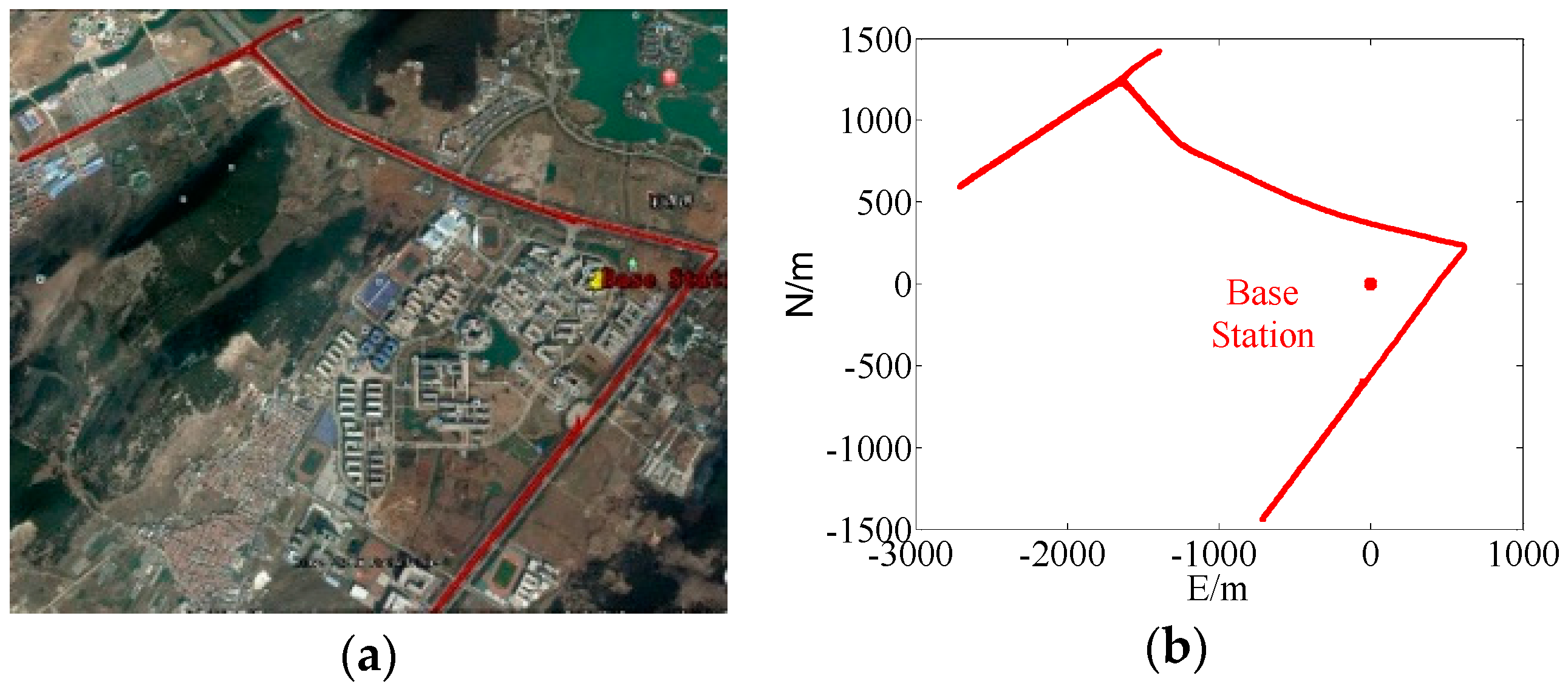
Firstly, the analysis on number of satellites for different cut-off elevation and baselines is obtained. The data were taken from the Hong Kong Base Station in March 2017 for baselines of 5 km, 10 km, and 15 km for BDS, GPS and BDS/GPS whose sampling interval was 30 s and the experiment lasted for 10 days. The obtained experimental results are shown in
Table 2.
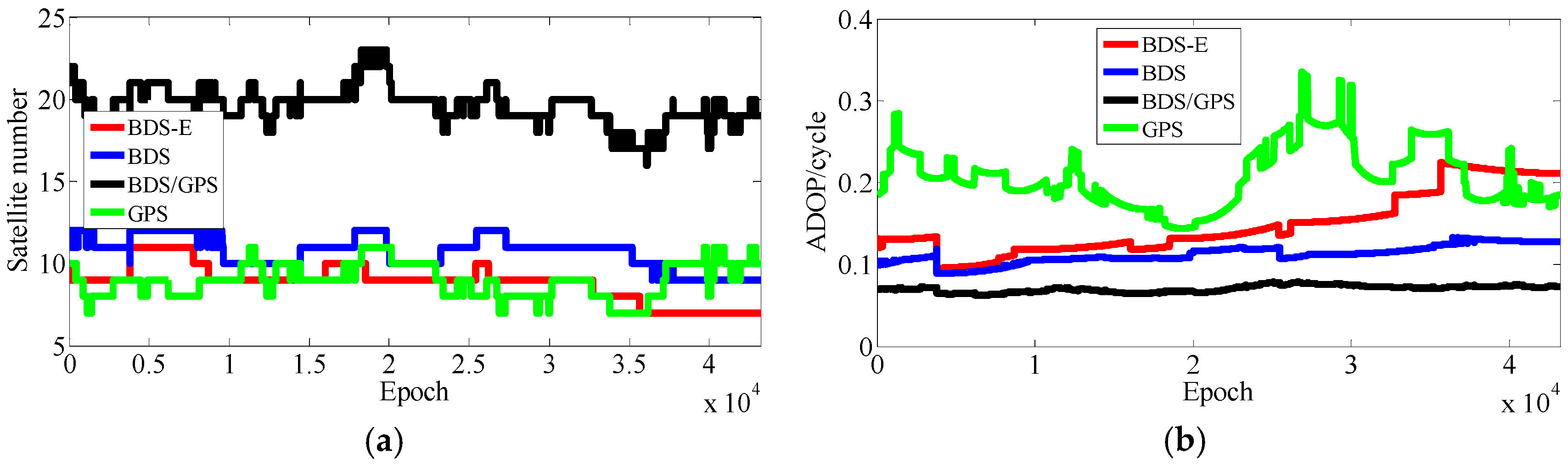
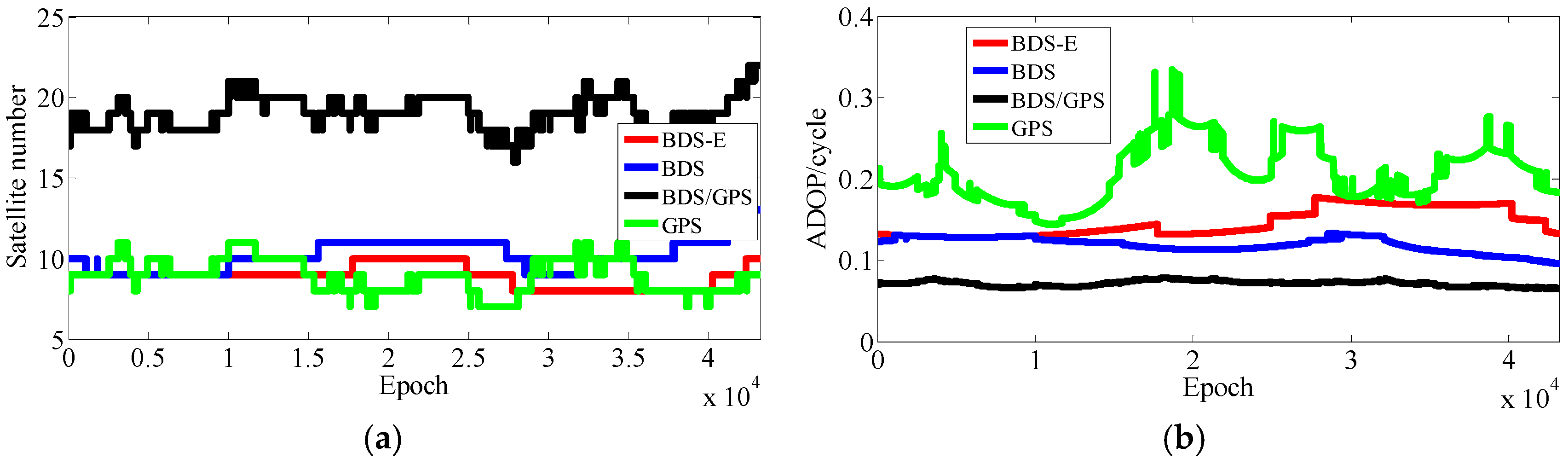
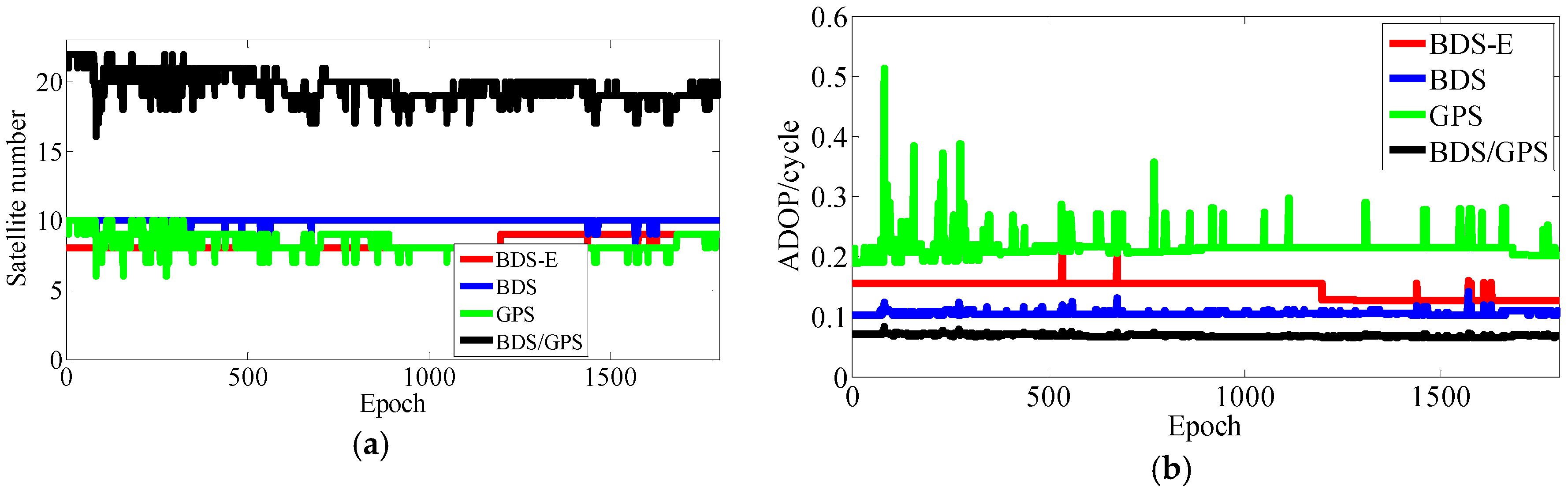
As can be seen in
Table 2, for any cut-off elevation, the number of satellites is larger in BDS than in GPS; for instance, from cut-off 20° to 40°, for each cutoff-elevation, on average BDS has three satellites more than GPS and for cut-off 50° and 60°, the number of satellites in BDS is two times as large as that of GPS. In BDS, the proportion of high-elevation satellites whose elevation is larger than 35° is about 70%, which means the high-elevation satellites are the majority in Asia-Pacific Region, especially China, while, in GPS, that proportion is about 50%, which means the low- and high-elevation satellites are equally distributed. In comparison to the single system, for any cut-off elevation, BDS/GPS has much larger number of satellites than any of presented single systems. Moreover, in BDS/GPS, the proportion of high-elevation satellites is about 60%.
(2) SFSE E-ADOP analysis of GPS and BDS for short baseline
Teunissen et al. [
10] indicated that the reason that the regional BDS has better single-frequency ambiguity resolution performance than GPS is caused mainly by its larger number of visible satellites. Based on above analyses, the large number of high-elevation satellites or SMRW can make
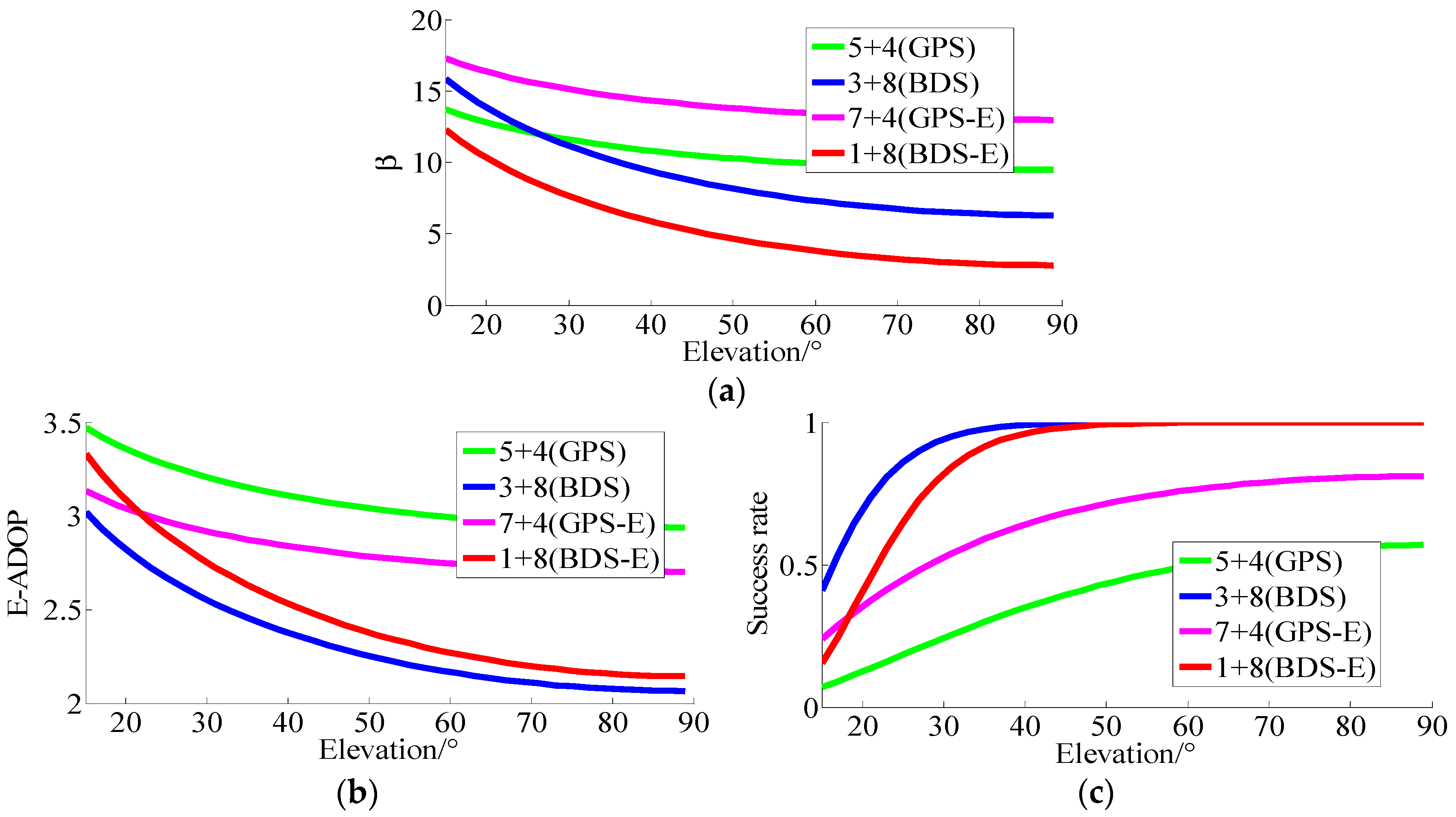
β smaller and, according to Equation (16), the number of satellites and SMRW of BDS can make E-ADOP of BDS smaller compared to that of GPS. Determining which of these factors plays the major role is analyzed through two steps. In the first step, low-elevation satellites (elevation of 10° or similar) are added to GPS to make its number of satellites equal to BDS number of satellites, and this system is called GPS-extended (GPS-E). According to Conclusion (1), the number of satellites mainly makes E-ADOP of GPS-E smaller compared to that of GPS. The second step is based on adjustment of proportion of high-and low-elevation satellites in GPS-E in order to form BDS, and, according to Conclusion (2), a large number of high-elevation satellites or SMRW mainly makes E-ADOP of BDS smaller compared to E-ADOP of GPS-E. Based on
Table 1,
and
in Equation (16). For BDS/GPS, the mean value of
and
was used, namely
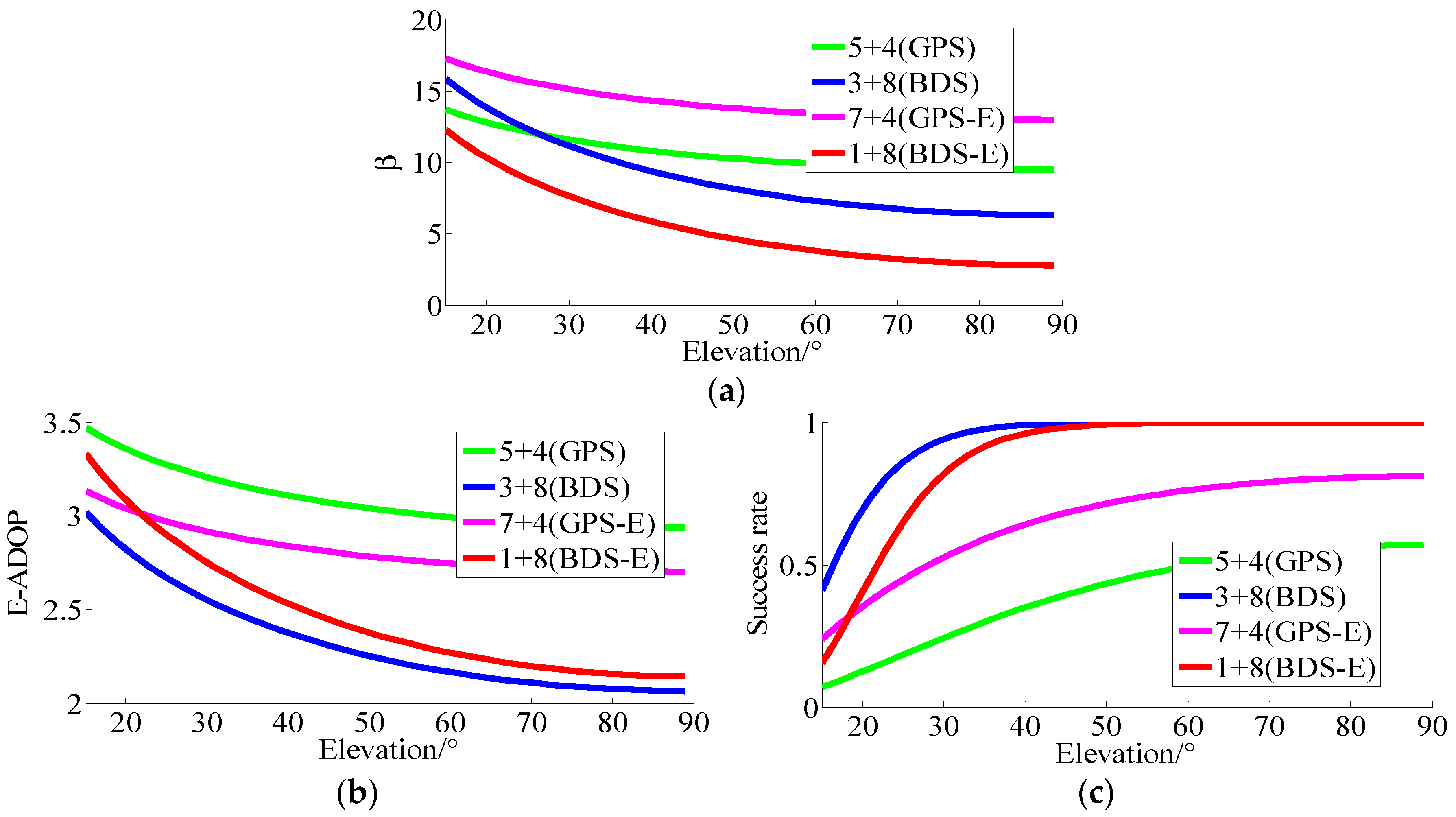
. Superscript b and g represent BDS and GPS, respectively. Combined with Equation (16), the results are shown in
Figure 4.
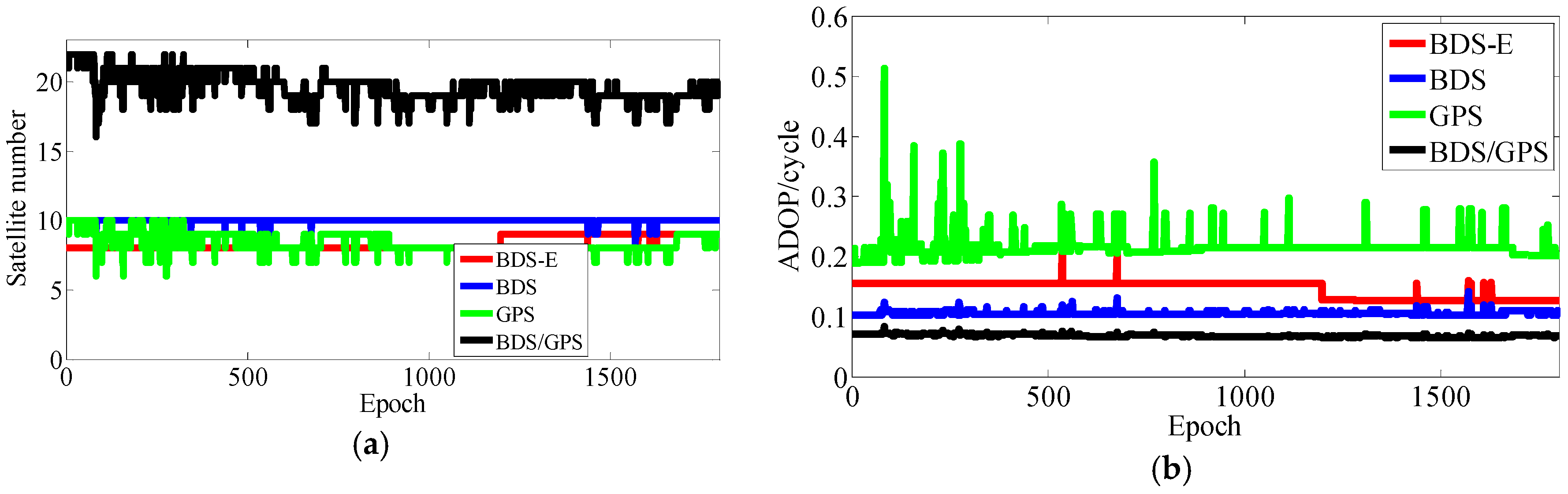
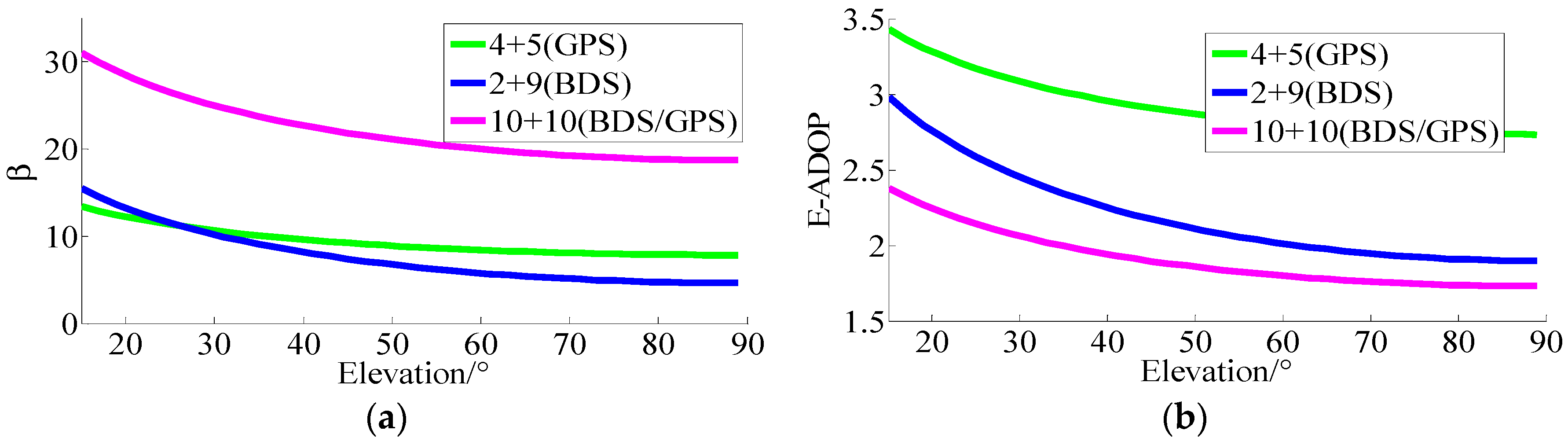
In
Figure 4,
β of BDS is smaller than
β of GPS when the elevation of
n2 satellites is higher than about 25° because of large number of high-elevation satellites in BDS. Based on the E-ADOP presented in
Figure 4, when the elevation of
satellites is higher than about 25° the E-ADOP of GPS-E is improved compared to GPS due to two added low-elevation satellites, but the difference is much smaller than the difference between GPS-E and BDS because the high- and low-elevation satellites proportion is adjusted. The larger the elevations of
n2 satellites are, the more obvious the difference is. Therefore, Conclusion (4) can be made: a large number of high-elevation satellites or SMRW makes E-ADOP of BDS smaller than E-ADOP of GPS, which is consistent with Conclusion (3). In addition, in BDS-extended (BDS-E) the number of satellites is equal to the number of satellites in GPS, but the number of high-elevation satellites is equal as in BDS. According to the E-ADOP and success rate in
Figure 4, a large number of high-elevation satellites of BDS-E can further make its E-ADOP smaller and success rate higher than those of GPS-E when the elevation of
satellites is higher than about 25°, although its number of satellites is smaller than that of GPS-E, which is consistent with Conclusion (3). The improvement of E-ADOP from GPS to BDS-E is much larger than the improvement of E-ADOP from BDS-E to BDS, which further validates Conclusion (4). At the same time, large number of satellites in BDS further makes its E-ADOP smaller compared to E-ADOP of GPS.
(3) SFSE E-ADOP analysis of BDS/GPS and single system for short baseline
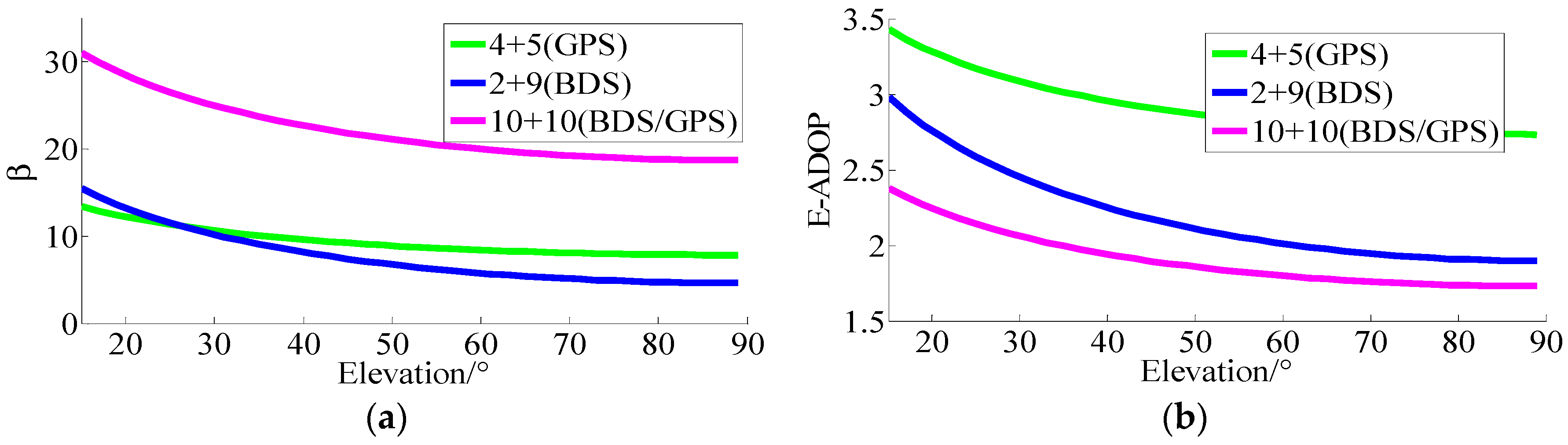
As already mentioned, three groups of
satellites, wherein
n1 denotes the number of low-elevation satellites and
n2 denotes the number of high-elevation satellites, are used to study the influence of number of satellites and SMRW on the E-ADOP based on the E-ADOP theory. The results are shown in
Figure 5.
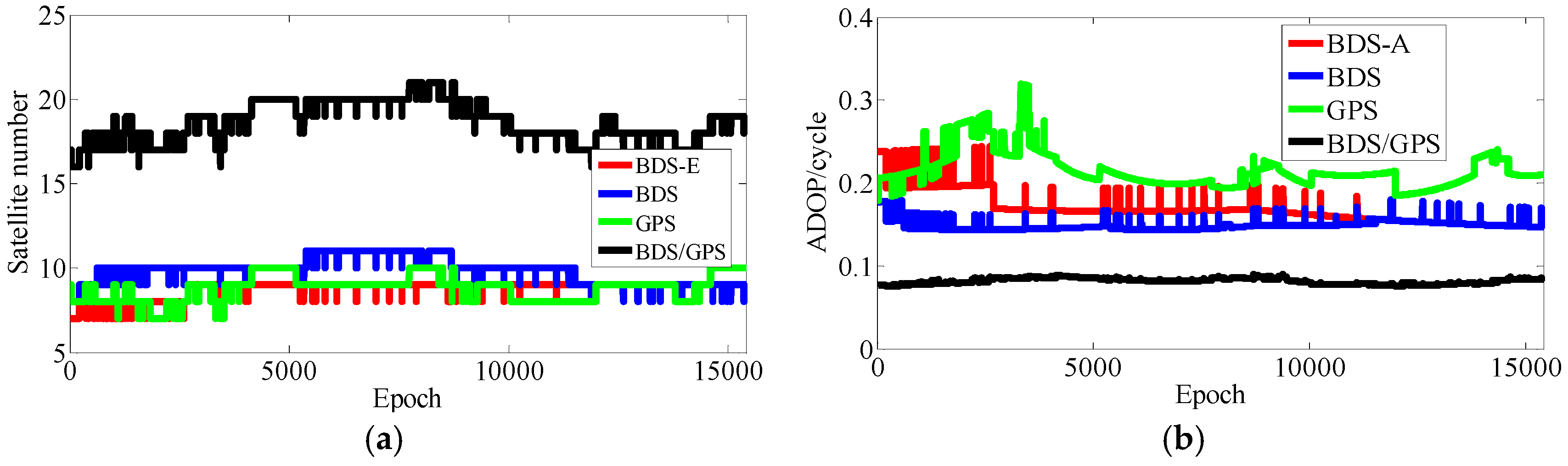
In
Figure 5,
β of BDS/GPS is much larger than
β of BDS and GPS, which is consistent with Theorem 1, while E-ADOP of BDS/GPS is smaller than E-ADOP of BDS and GPS. Based on Equation (16), Conclusion (5) can be made: a large number of satellites is the dominant factor to make E-ADOP of BDS/GPS smaller than E-ADOP of standalone BDS and GPS, which is consistent with Conclusion (1).
Conclusions (4) and (5) apply equally to ADOP.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}