
Time-Domain Simulation of Along-Track Interferometric SAR for Moving Ocean Surfaces

Abstract
:1. Introduction
2. Simulation Method
2.1. AT-InSAR Signal

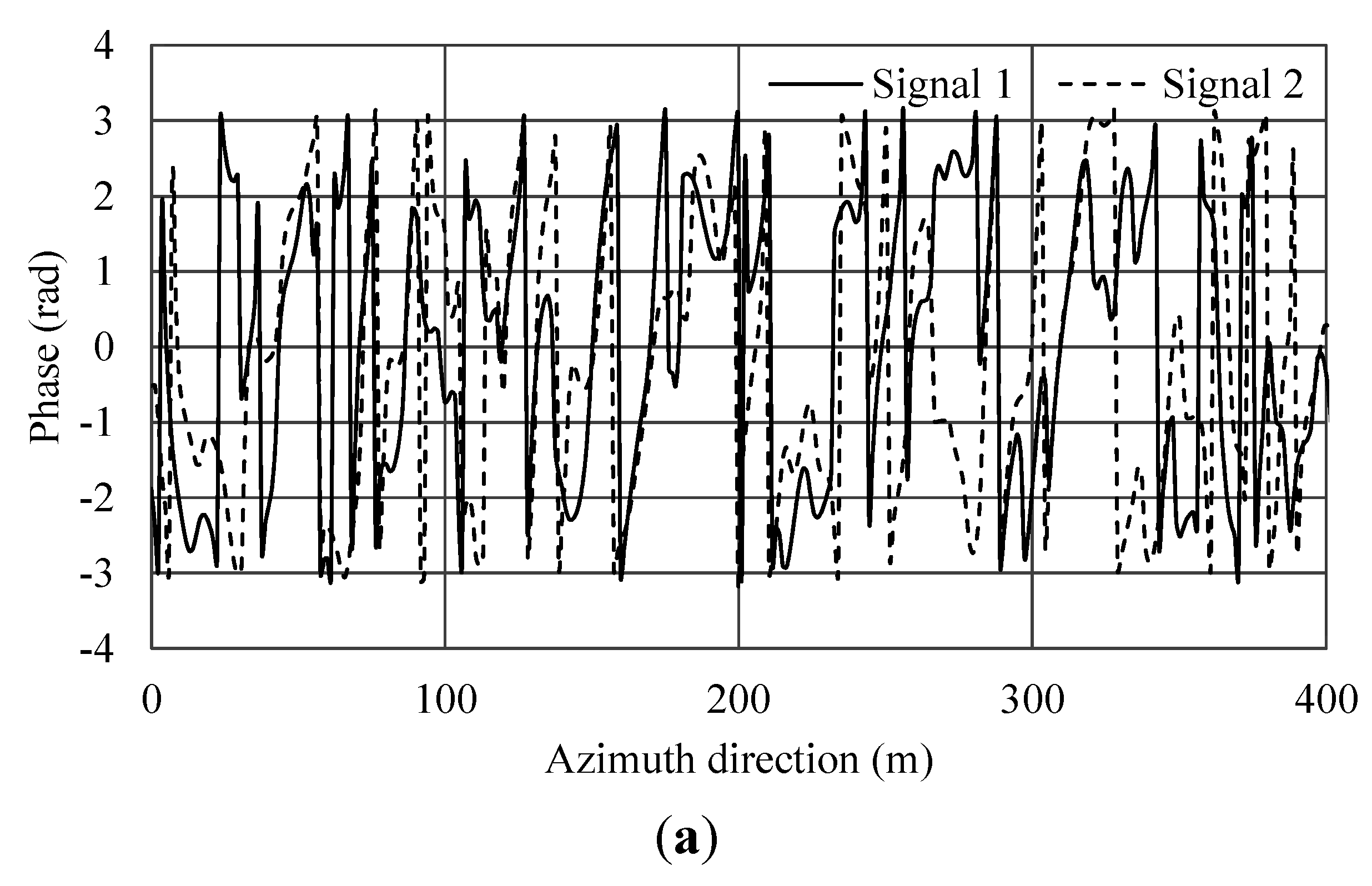
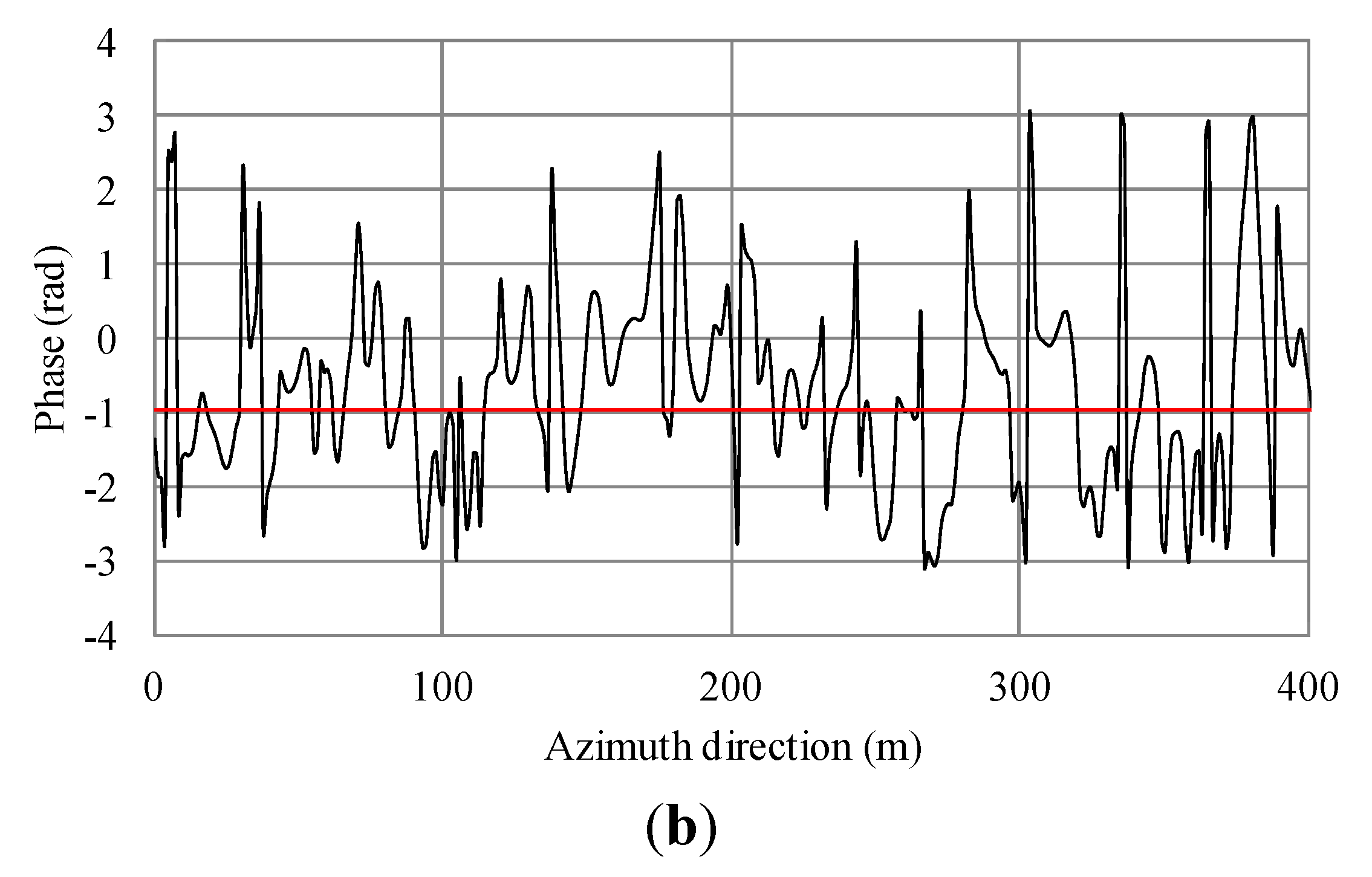
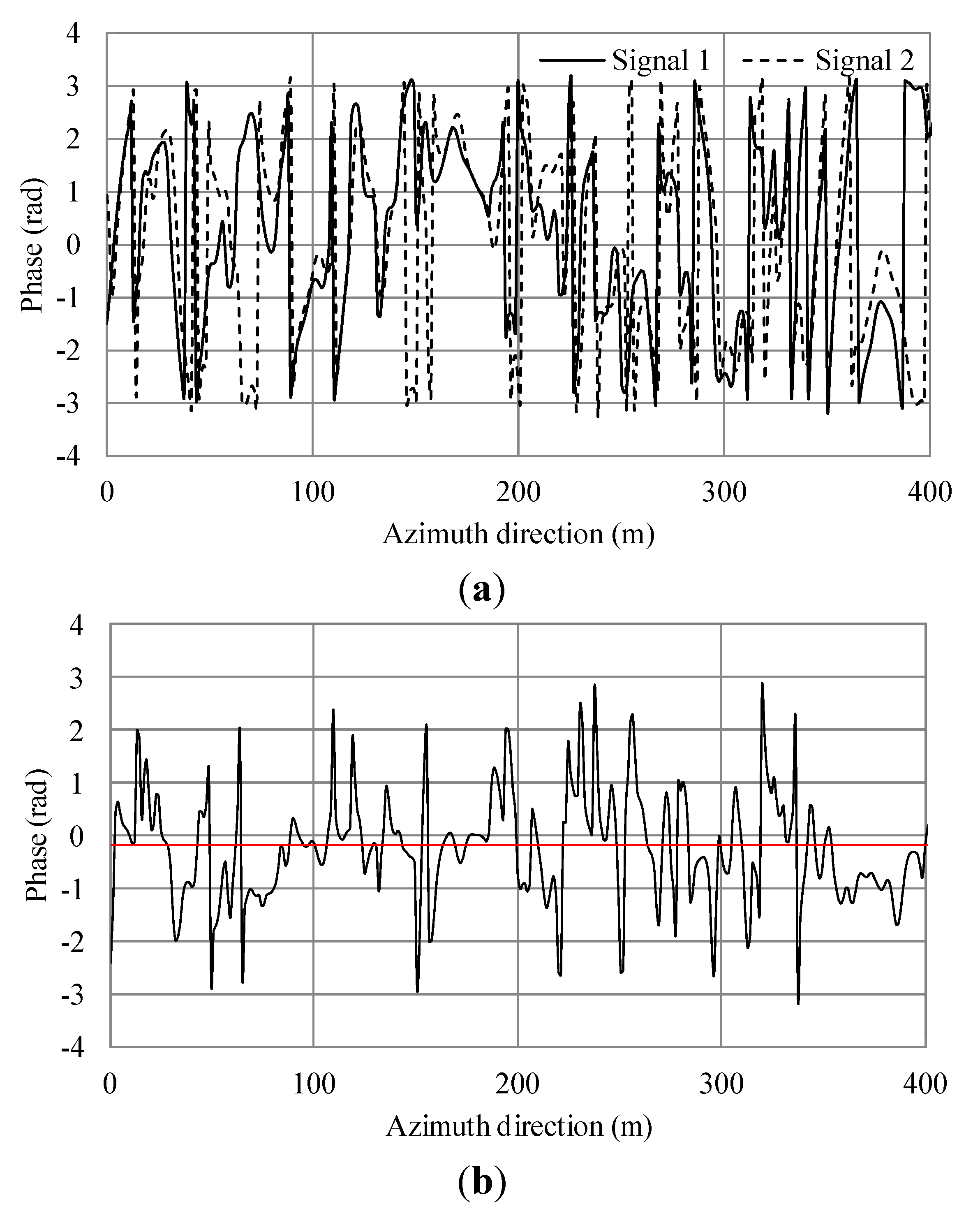
2.2. Interferometry
2.3. Numerical Sea Surface
3. Results
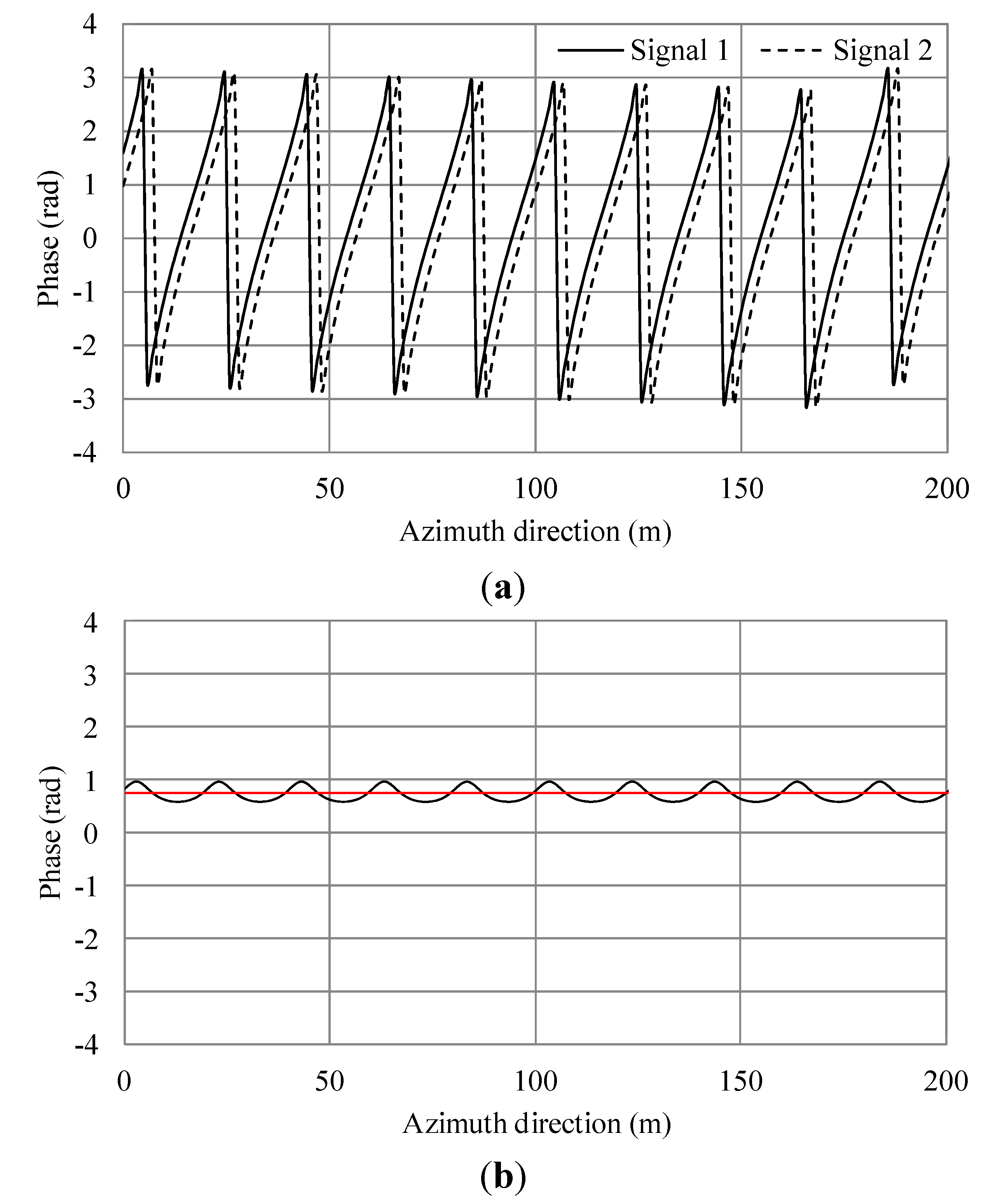
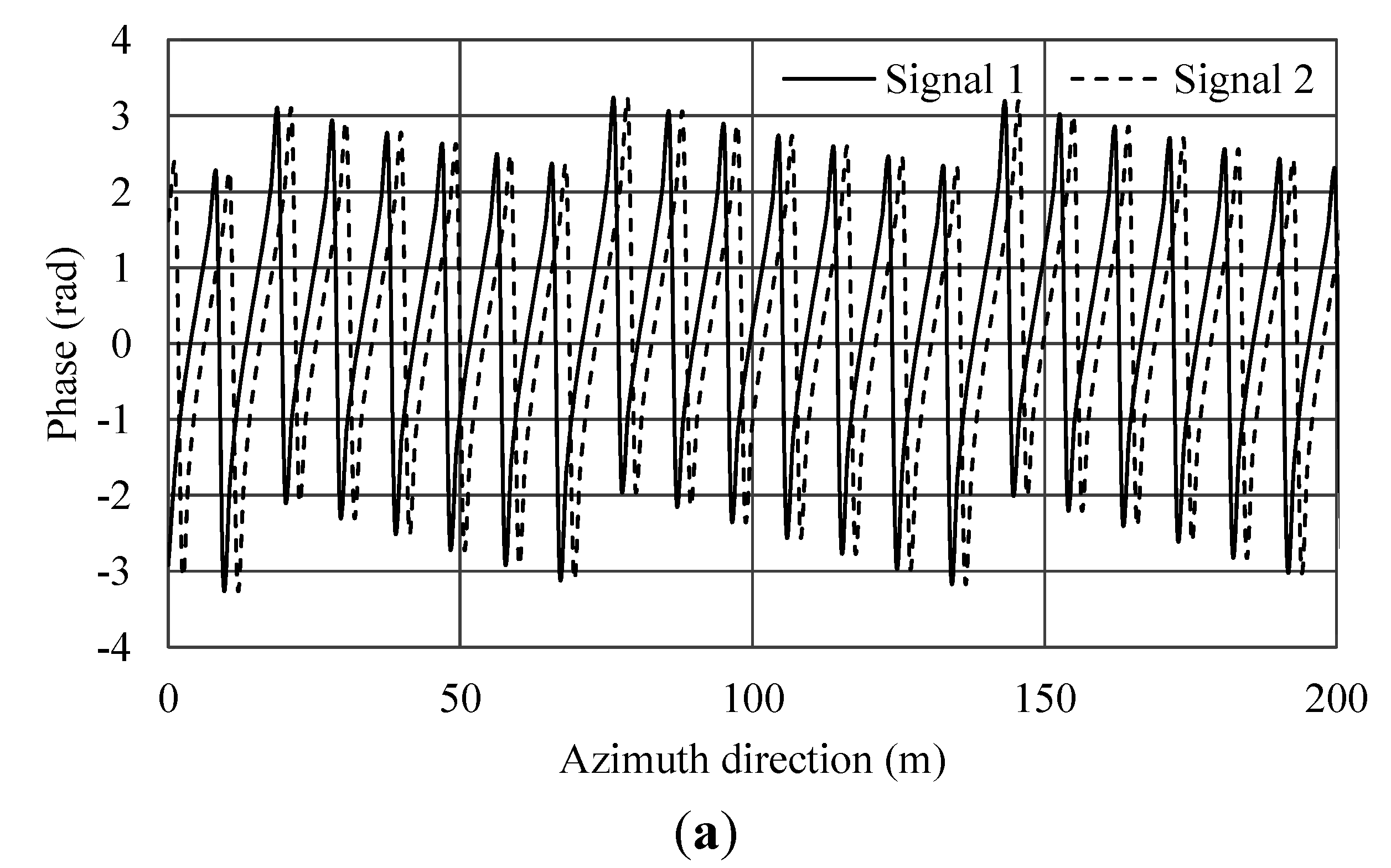
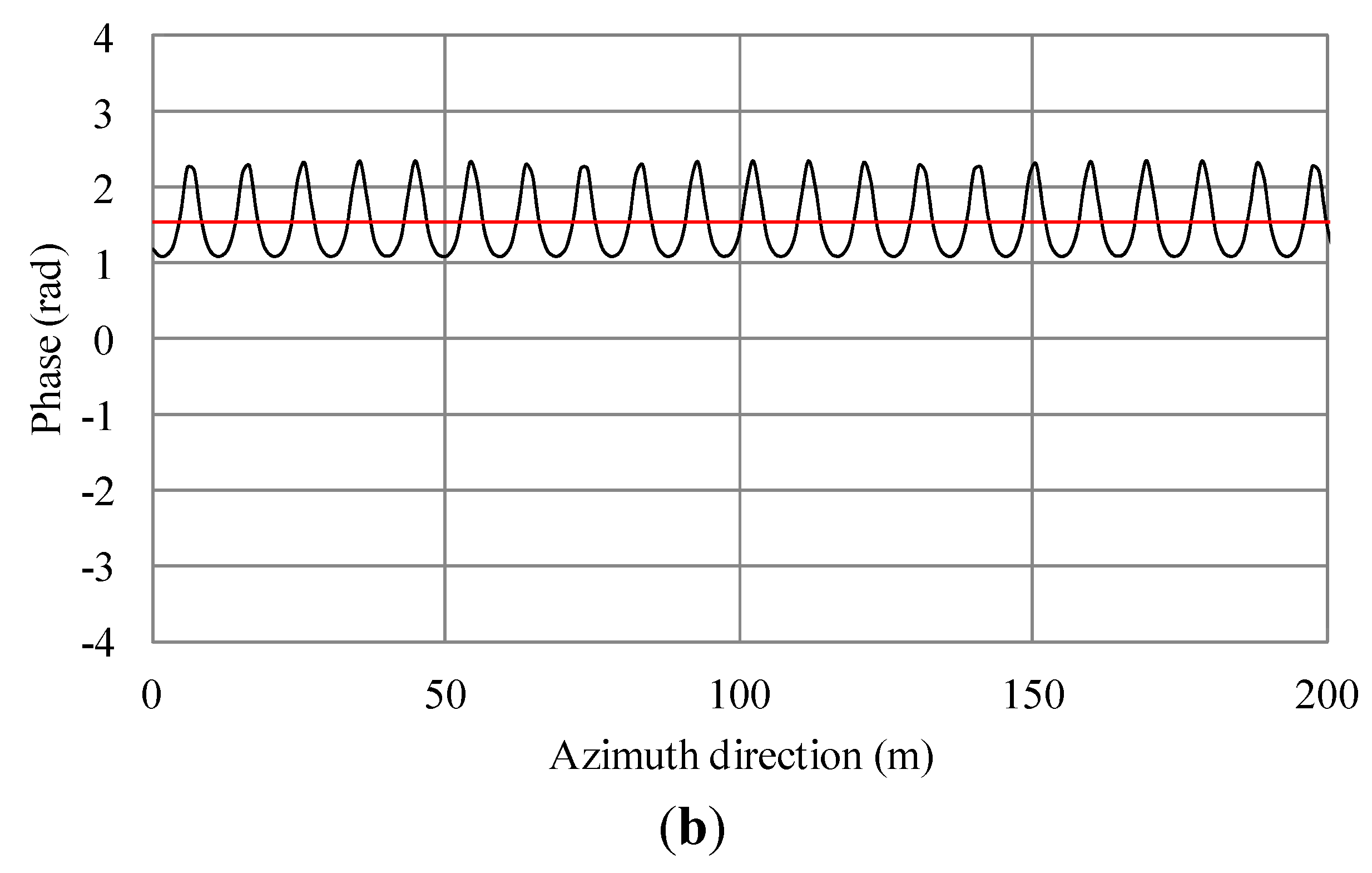
3.1. Bragg Resonant Wave

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Radar frequency | 1.275 GHz |
| Radar wavelength | 0.235 m |
| Polarization | HH |
| Incident angle | 40 deg |
| Range resolution | 4.5 m |
| Azimuth resolution | 3 m |
| Pulse duration | 0.2 μs |
| Pulse reputation frequency | 50 Hz |
| Chirp rate | 250 × 1012 Hz/s |
| Chirp band width | 50 MHz |
| Sampling frequency | 255.3 MHz |
| Altitude of platform | 1500 m |
| Velocity of platform | 58.75 m/s |
| Calculation area (small range case) | Range: 100 (4.7)m Azimuth: 80 m |
| Scale of computational grid | 0.047 m |
| Range beam width | 10.0 degree |
| Range antenna length | 1.2 m |
| Azimuth beam width | 2.0 degree |
| Azimuth antenna length | 6.0 m |
| Base line | 4.7 m |

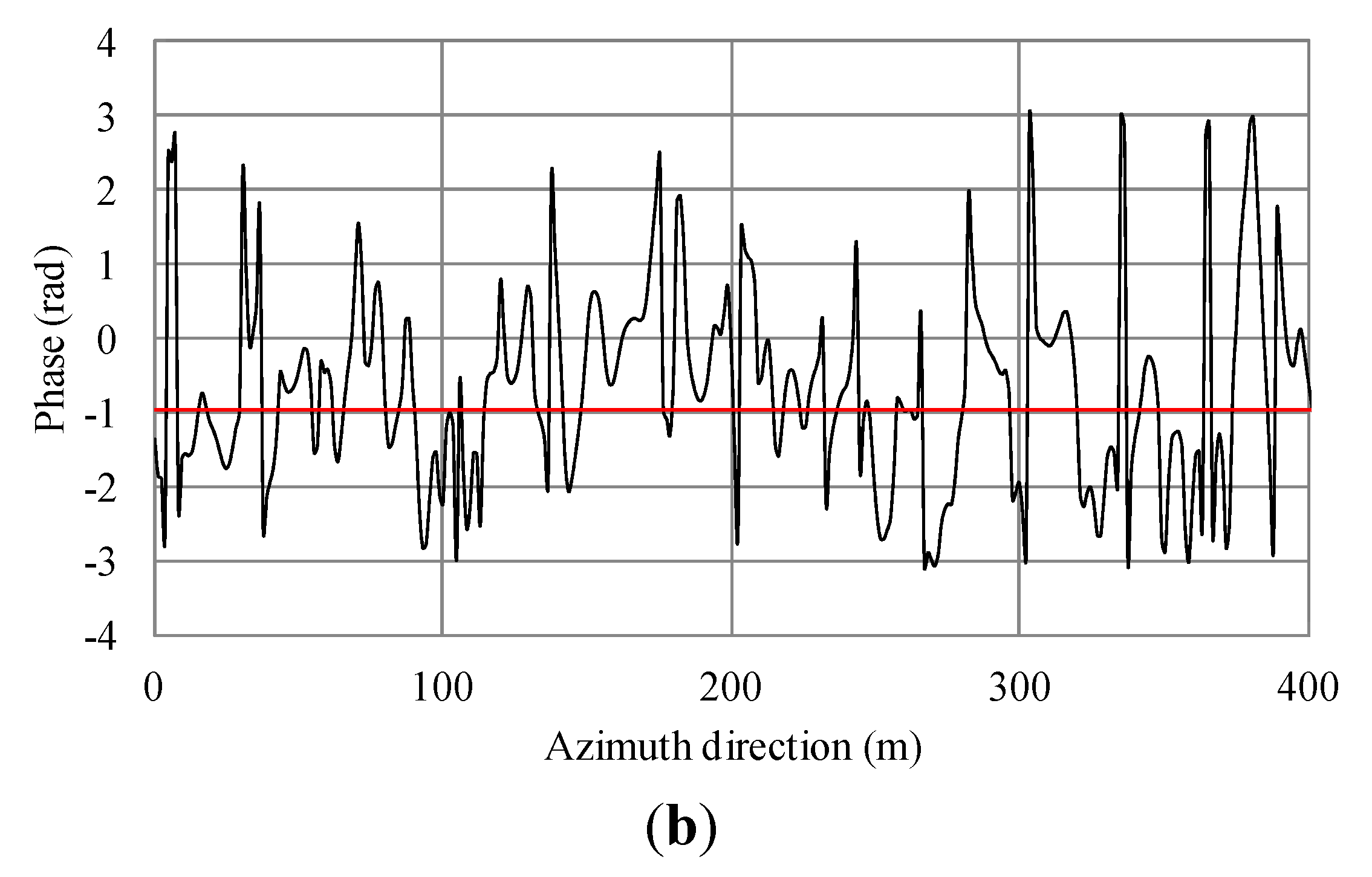
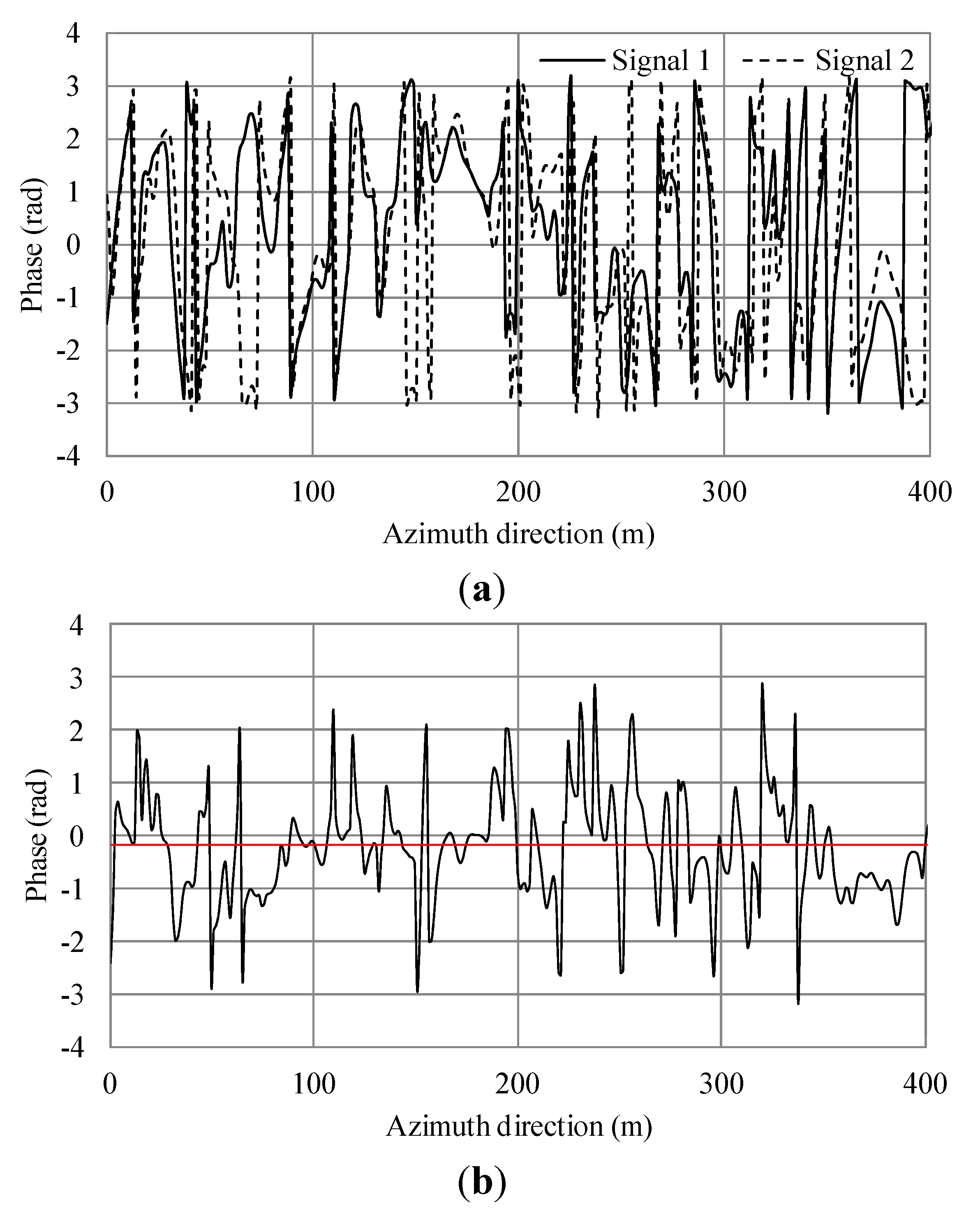
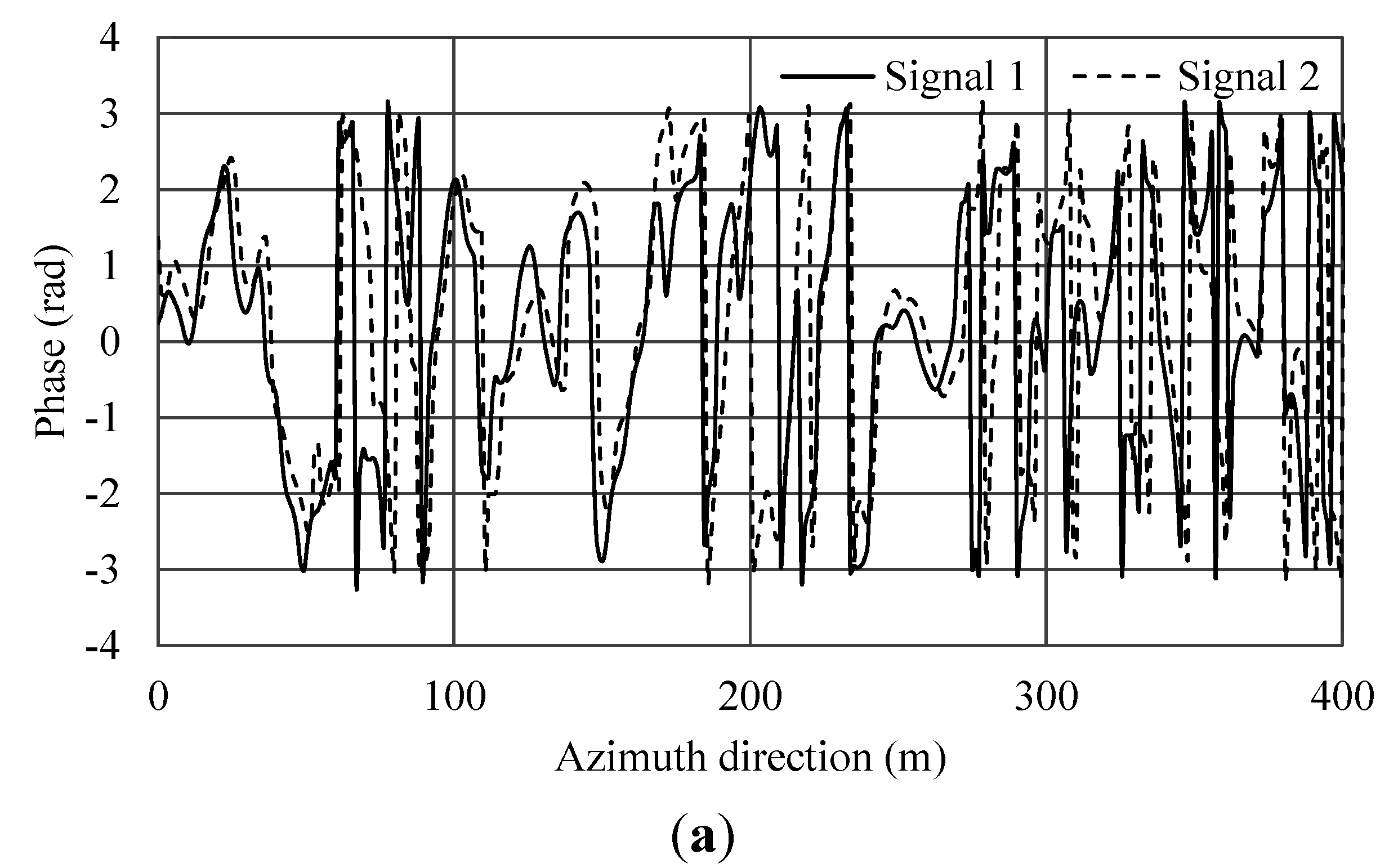
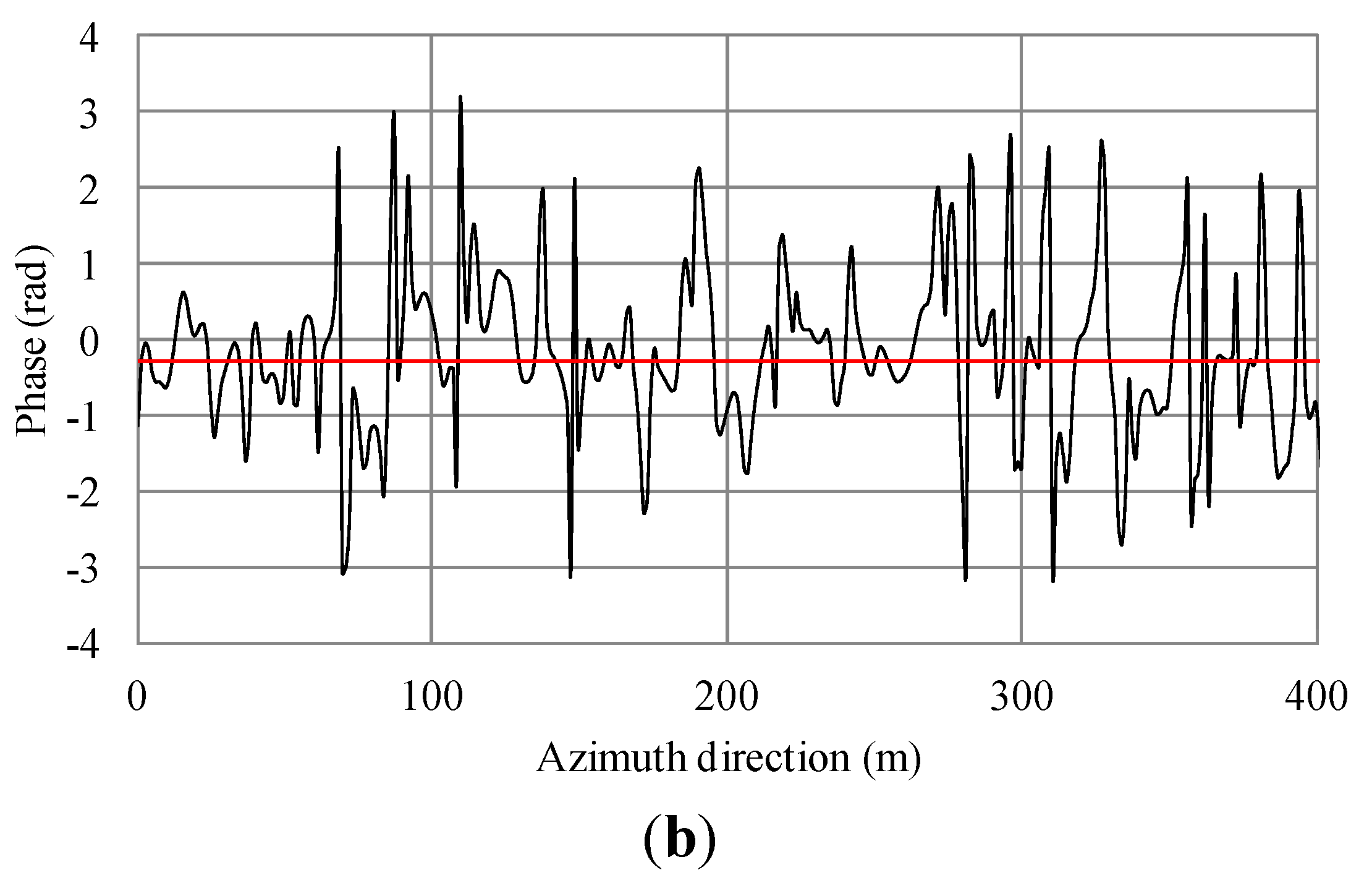
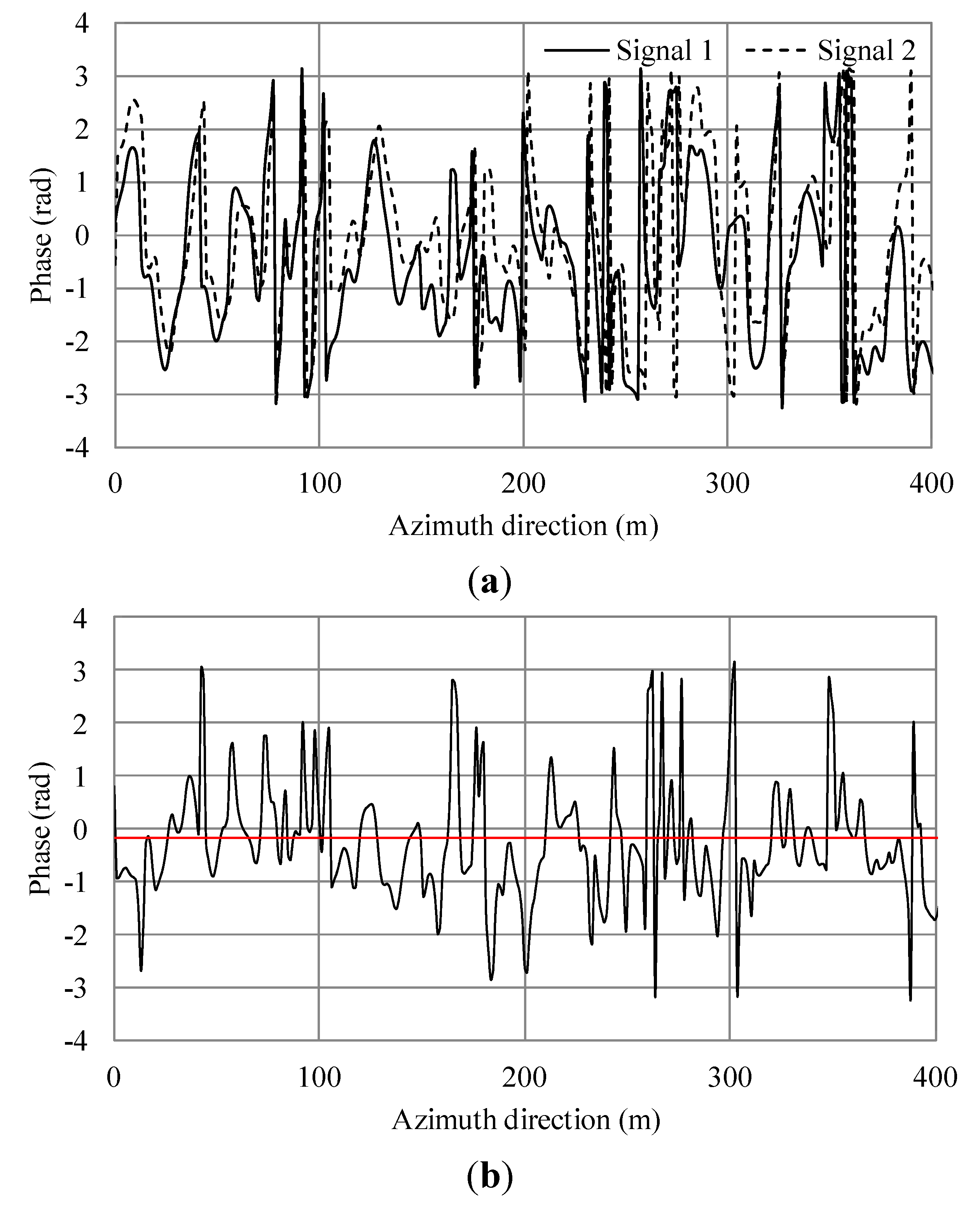
3.2. Irregular Wave with Current


4. Conclusions
Author Contributions
Conflicts of Interest
References
- Ouchi, K. Recent trend and advance of synthetic aperture radar with selected topics. Remote Sens. 2013, 5, 716–807. [Google Scholar] [CrossRef]
- Yang, L.; Wang, T.; Bao, Z. Ground moving target indication using an InSAR system with a hybrid baseline. IEEE Geosci. Remote Sens. Lett. 2008, 5, 373–377. [Google Scholar] [CrossRef]
- Budillon, A.; Pascazio, V.; Schirinzi, G. Multichannel along-track interferometric SAR systems: Moving targets detection and velocity estimation. Int. J. Navig. Obs. 2008. [Google Scholar] [CrossRef]
- Toporkov, J.V. Analytical Study of Along-Track InSAR Imaging of a Distributed Evolving Target With Application to Phase and Coherence Signatures of Breakers and Whitecaps. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1385–1389. [Google Scholar] [CrossRef]
- Romeiser, R.; Thompson, D.R. Numerical study on the along-track interferometric radar imaging mechanism of oceanic Surface currents. IEEE Trans. Geosci. Remote Sens. 2000, 38, 446–458. [Google Scholar] [CrossRef]
- Frasier, S.J.; Camps, A.J. Dual-beam interferometry for ocean surface current vector mapping. IEEE Trans. Geosci. Remote Sens. 2001, 39, 401–414. [Google Scholar] [CrossRef]
- Bao, M.; Bruning, C.; Alpers, W. Simulation of ocean waves imaging by an along-track interferometric synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 1997, 35, 618–631. [Google Scholar]
- Biao, Z.; He, Y.; Vachon, P. Numerical simulation and validation by an along-track interferometric synthetic aperture radar. Chin. J. Oceanol. Limnol. 2008, 26, 1–8. [Google Scholar]
- Wright, J.W. A new model for sea clutter. IEEE Trans. Antennas. Propag. 1968, 16, 217–223. [Google Scholar] [CrossRef]
- Yoshida, T.; Rheem, C.-K. SAR image simulation in the time domain for moving ocean surfaces. Sensors 2013, 13, 4450–4467. [Google Scholar] [CrossRef] [PubMed]
- Silver, S. Microwave Antenna Theory and Design; Peter Peregrinus Ltd.: London, UK, 1949; pp. 144–168. [Google Scholar]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. IEEE Proc. 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Pierson, W.J., Jr.; Moskowitz, L. A proposed spectral form for fully developed wind seas based on the similarity theory of S.A. Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Marom, M.; Shemer, L.; Thornton, E.B. Energy density directional spectra of a nearshore wave field measured by interferometric synthetic aperture radar. J. Geophys. Res. 1991, 96, 22125–22134. [Google Scholar] [CrossRef]
- Shemer, L.; Kit, E. Simulation of an interferometric synthetic aperture radar imagery of ocean system consisting of a current and a monochromatic wave. J. Geophys. Res. 1991, 96, 22063–22073. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoshida, T.; Rheem, C.-K. Time-Domain Simulation of Along-Track Interferometric SAR for Moving Ocean Surfaces. Sensors 2015, 15, 13644-13659. https://doi.org/10.3390/s150613644
Yoshida T, Rheem C-K. Time-Domain Simulation of Along-Track Interferometric SAR for Moving Ocean Surfaces. Sensors. 2015; 15(6):13644-13659. https://doi.org/10.3390/s150613644
Chicago/Turabian StyleYoshida, Takero, and Chang-Kyu Rheem. 2015. "Time-Domain Simulation of Along-Track Interferometric SAR for Moving Ocean Surfaces" Sensors 15, no. 6: 13644-13659. https://doi.org/10.3390/s150613644
APA StyleYoshida, T., & Rheem, C.-K. (2015). Time-Domain Simulation of Along-Track Interferometric SAR for Moving Ocean Surfaces. Sensors, 15(6), 13644-13659. https://doi.org/10.3390/s150613644