
An Efficient Adaptive Angle-Doppler Compensation Approach for Non-Sidelooking Airborne Radar STAP

Abstract
:
1. Introduction
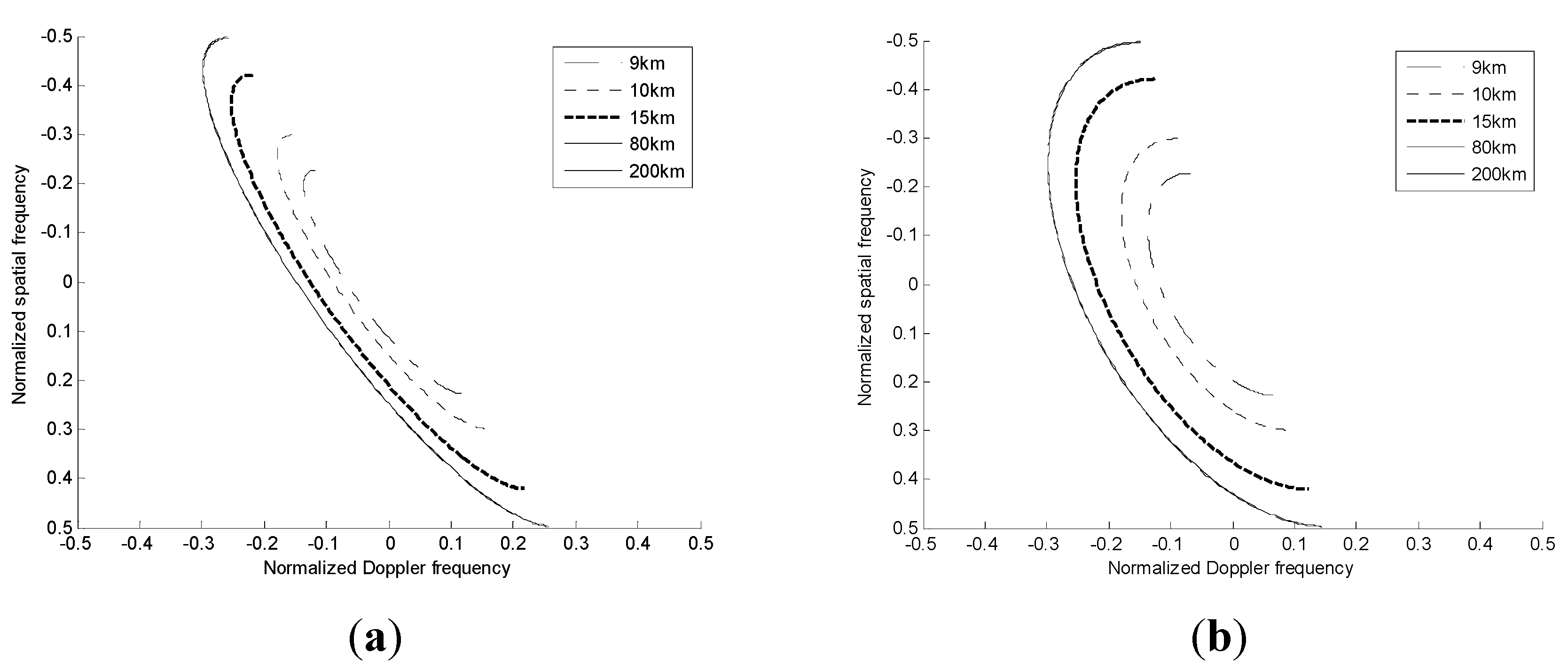
2. Properties of Non-SLAR Clutter
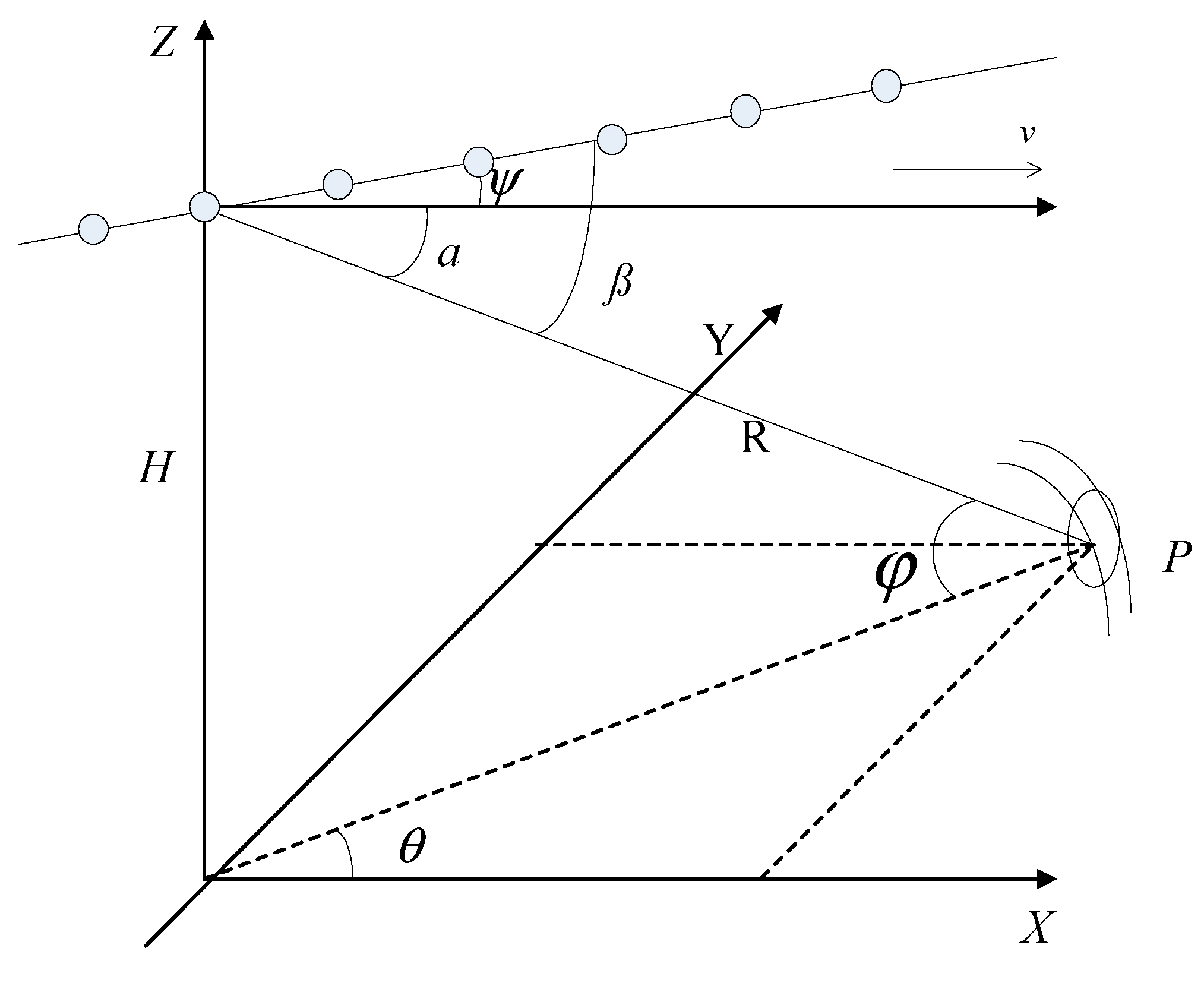
2.1. Signal Model

2.2. Overview of the AADC Approach
3. The Implementation of EAADC

3.1. Estimation of Main-Lobe Clutter Doppler Frequency
3.2. Estimation of the Main-Lobe Clutter Spatial Frequency
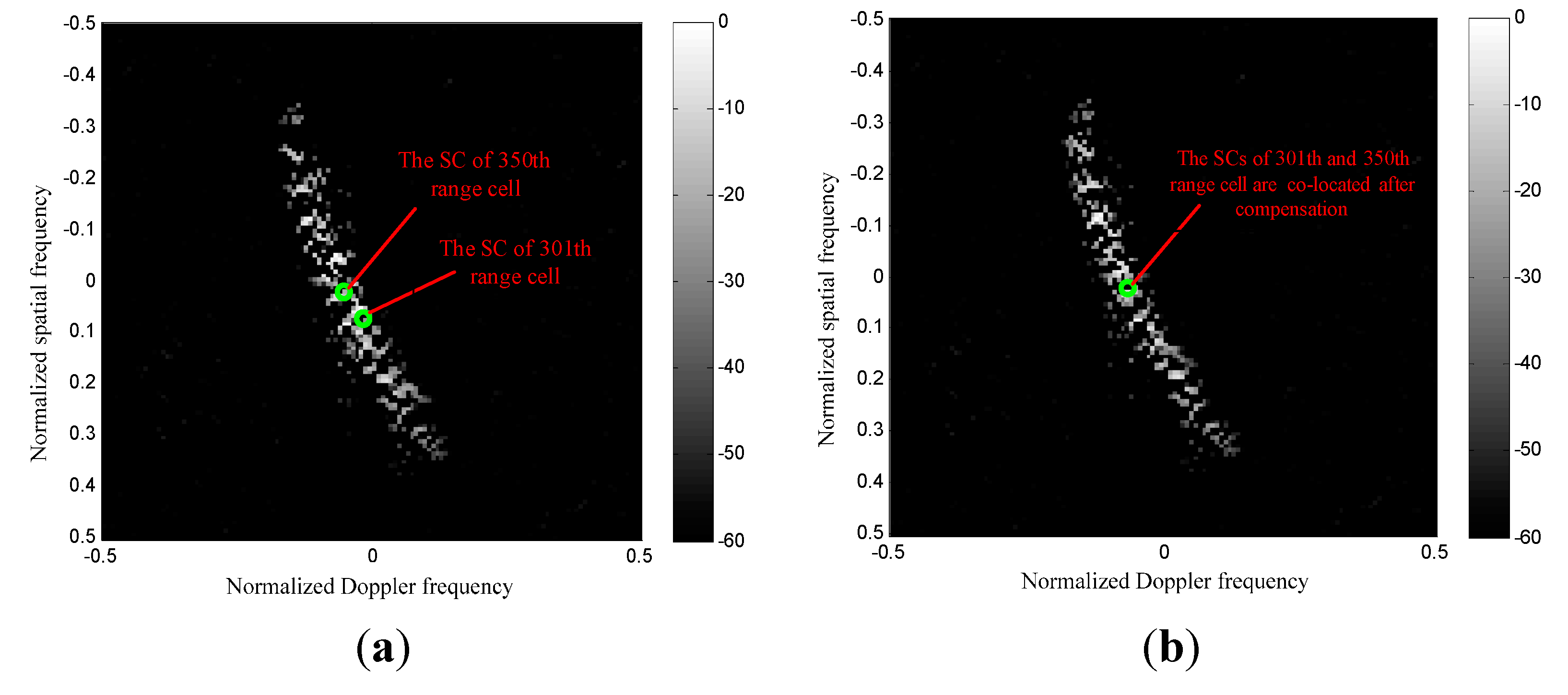
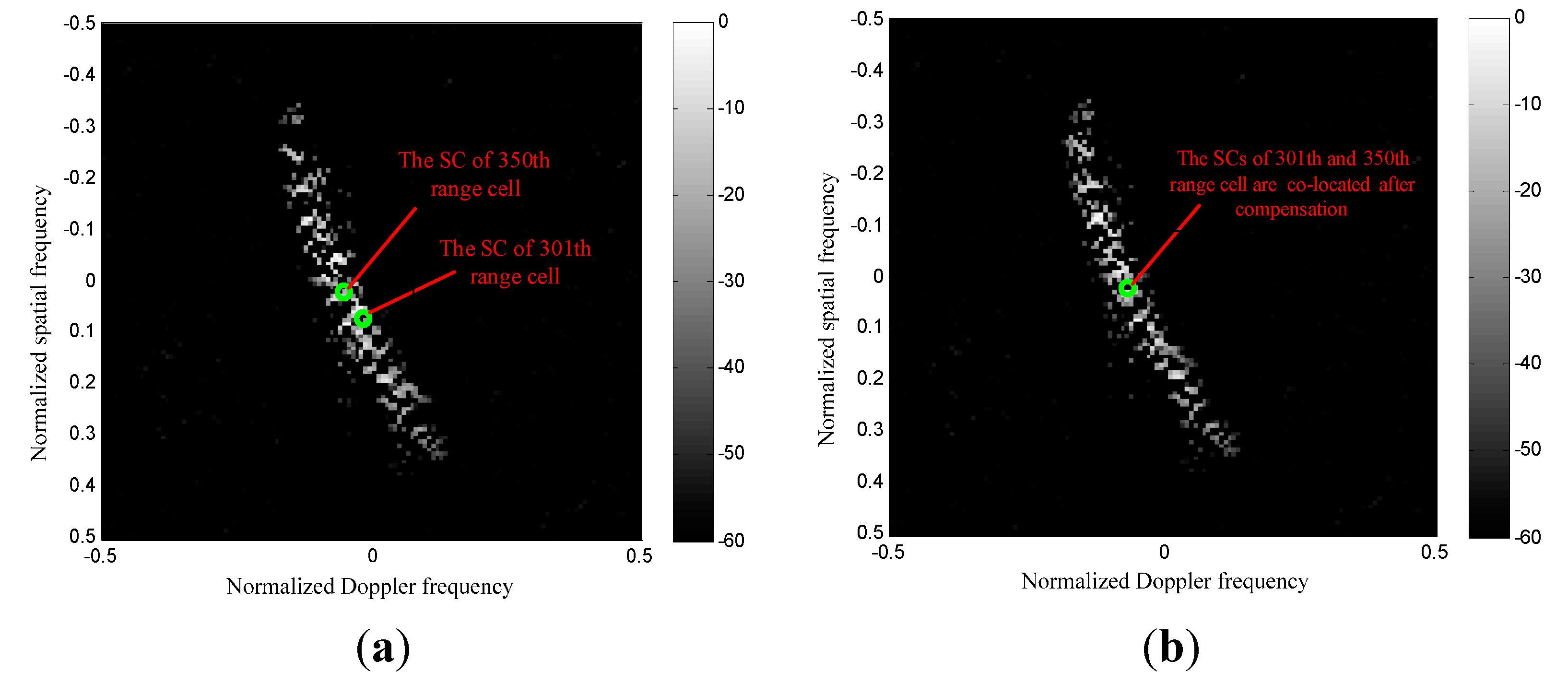
3.3. Adaptive Compensation of the Spectral Centers
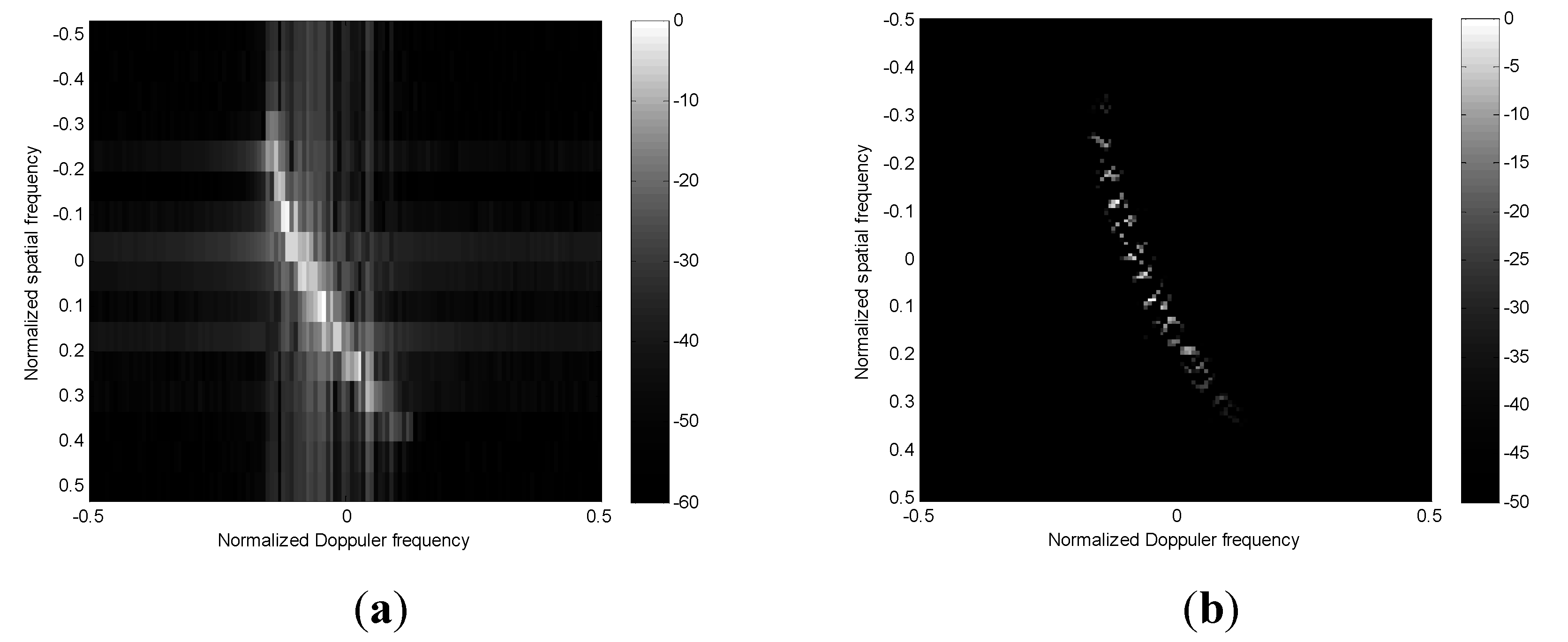
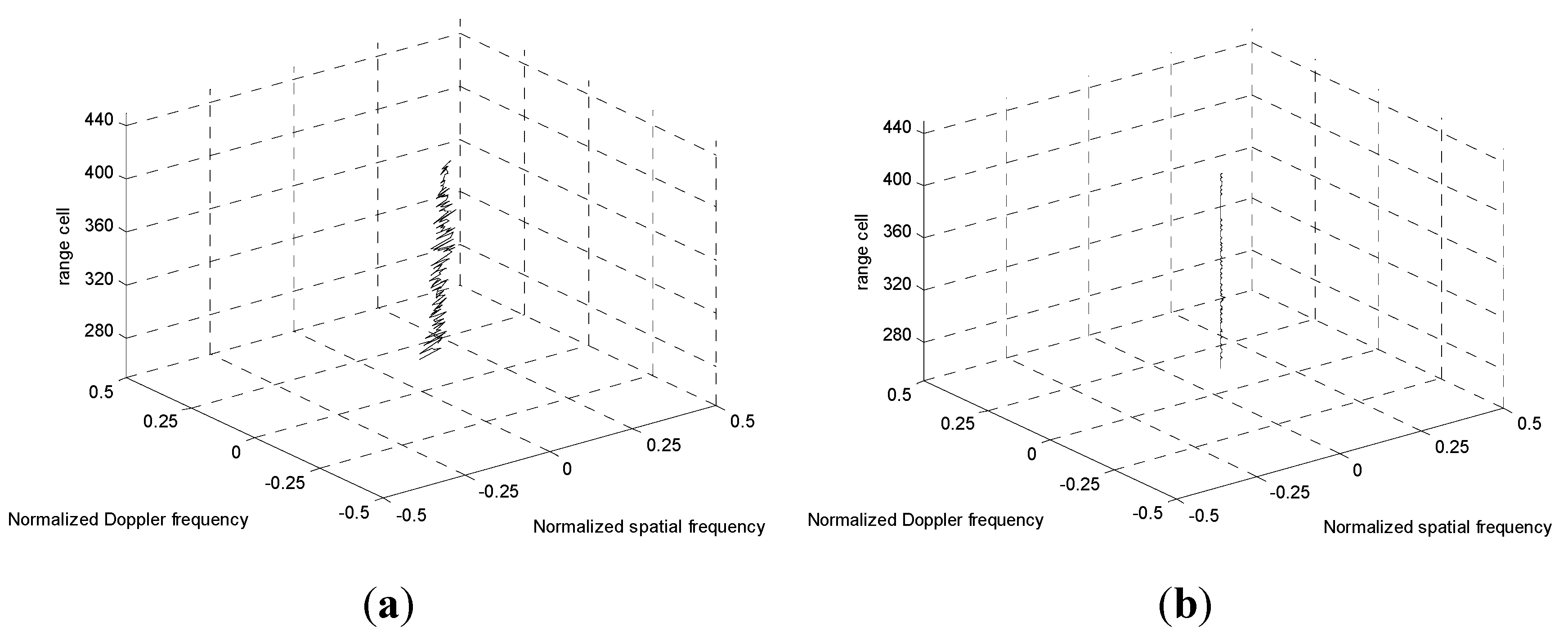
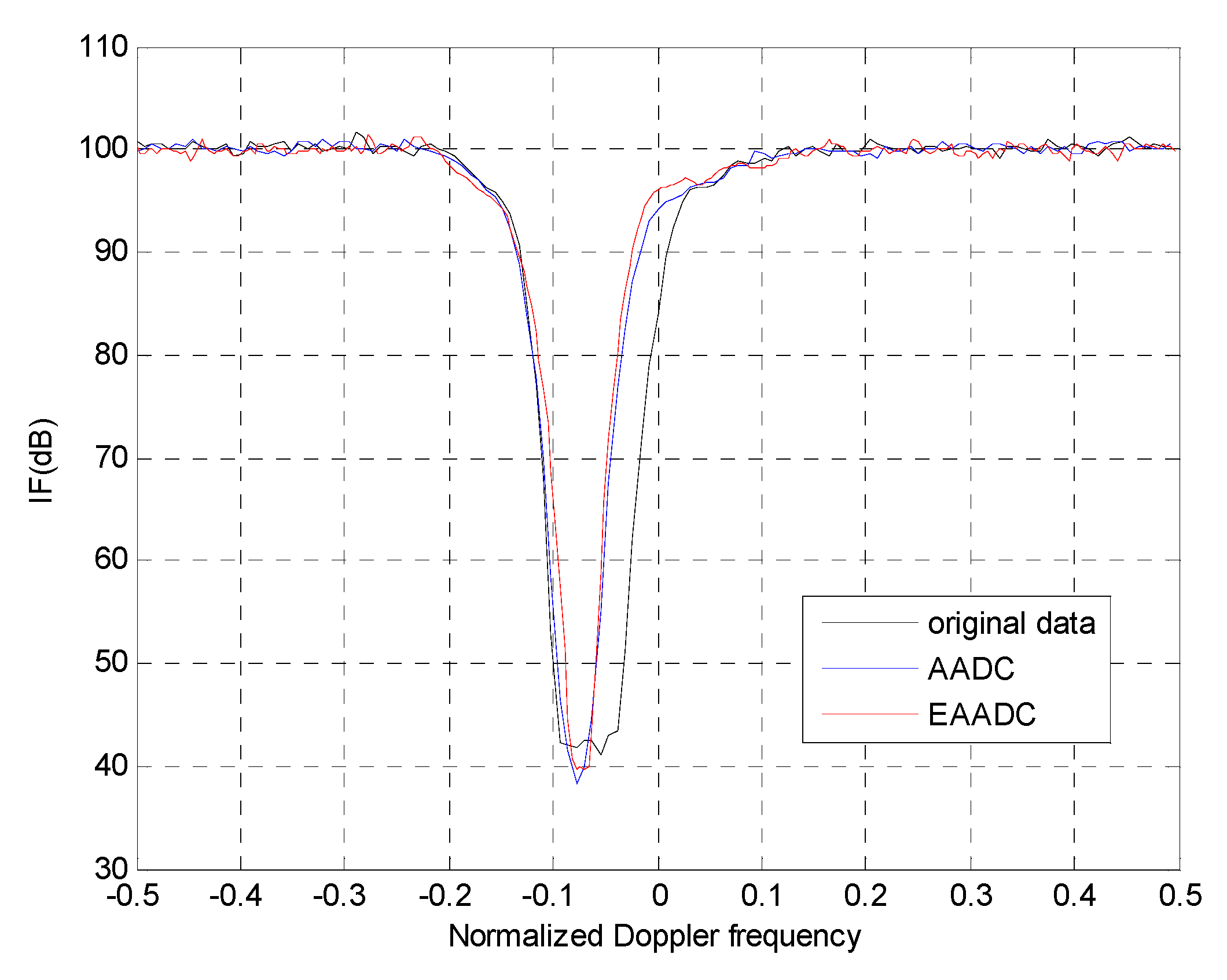
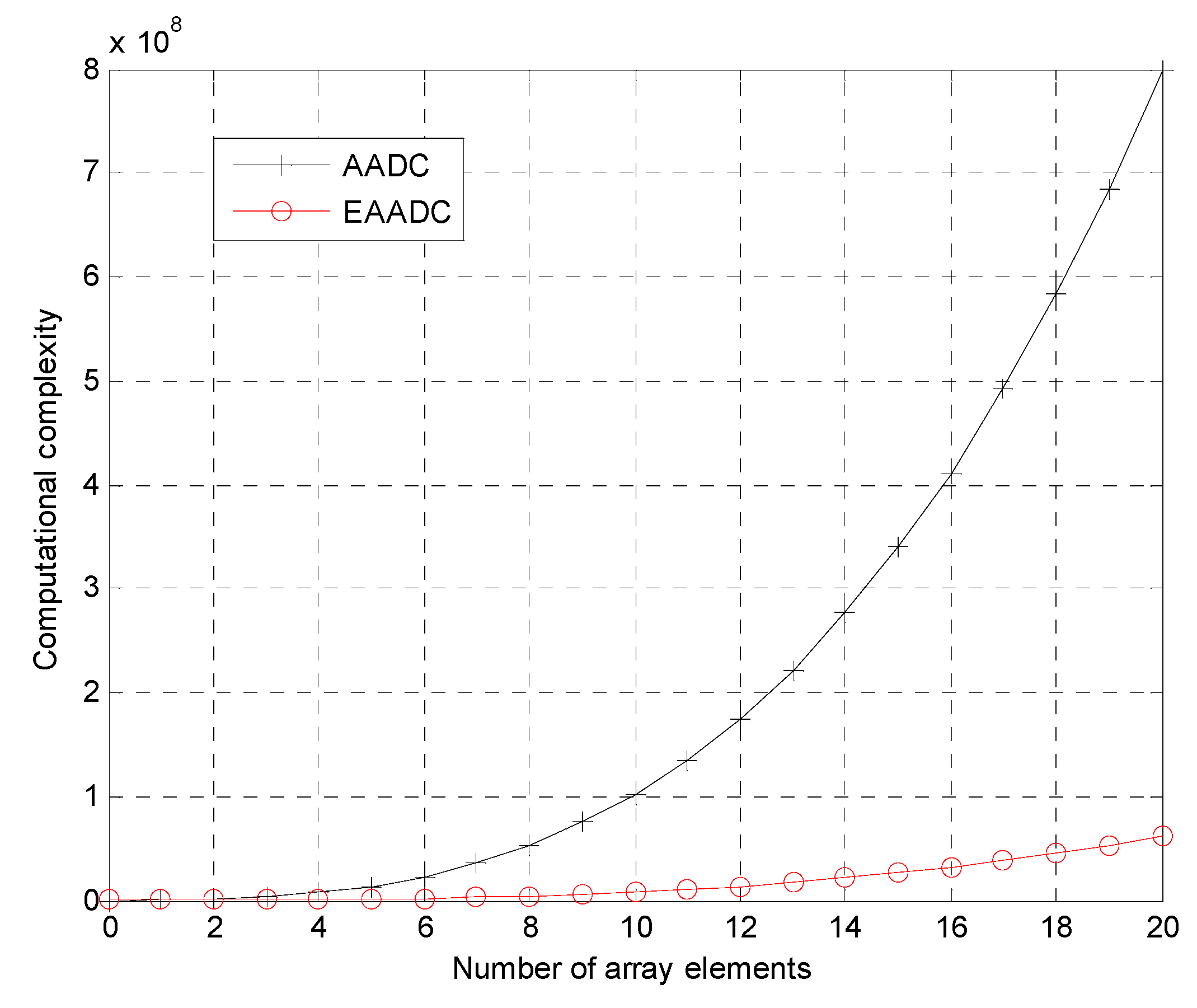
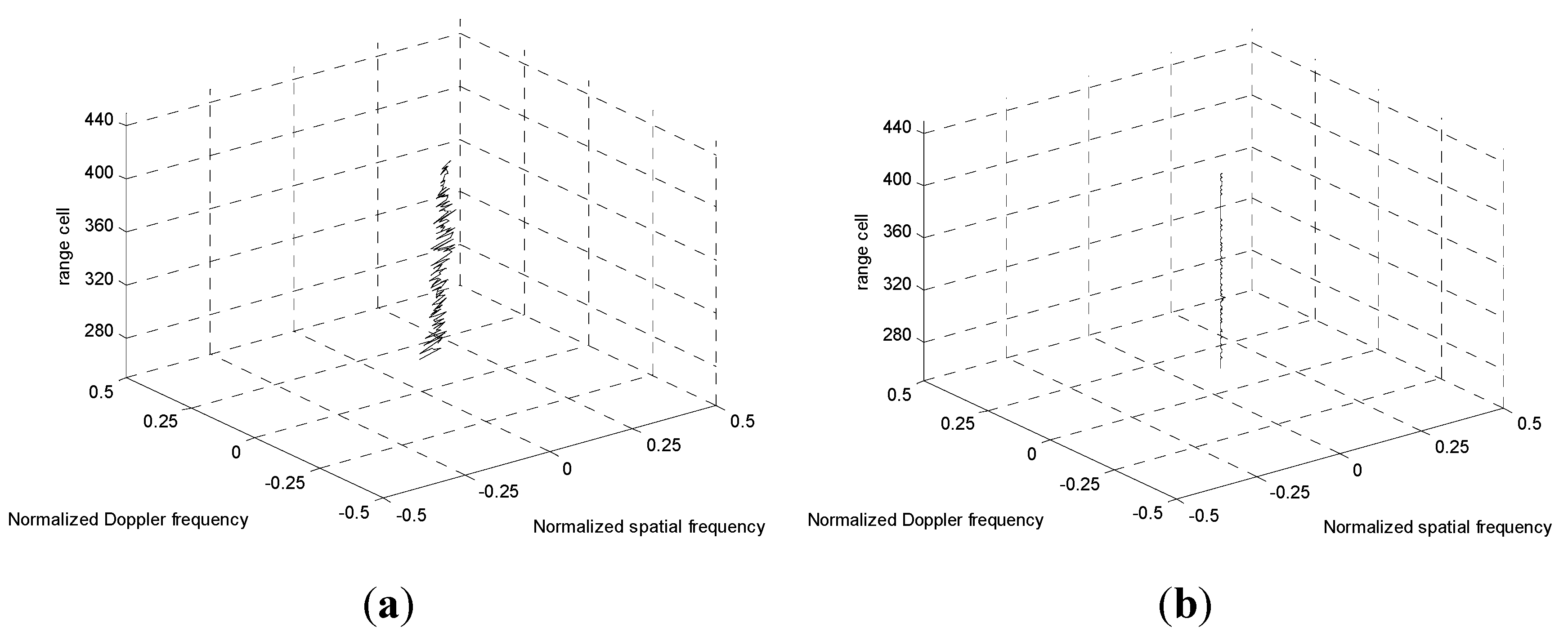
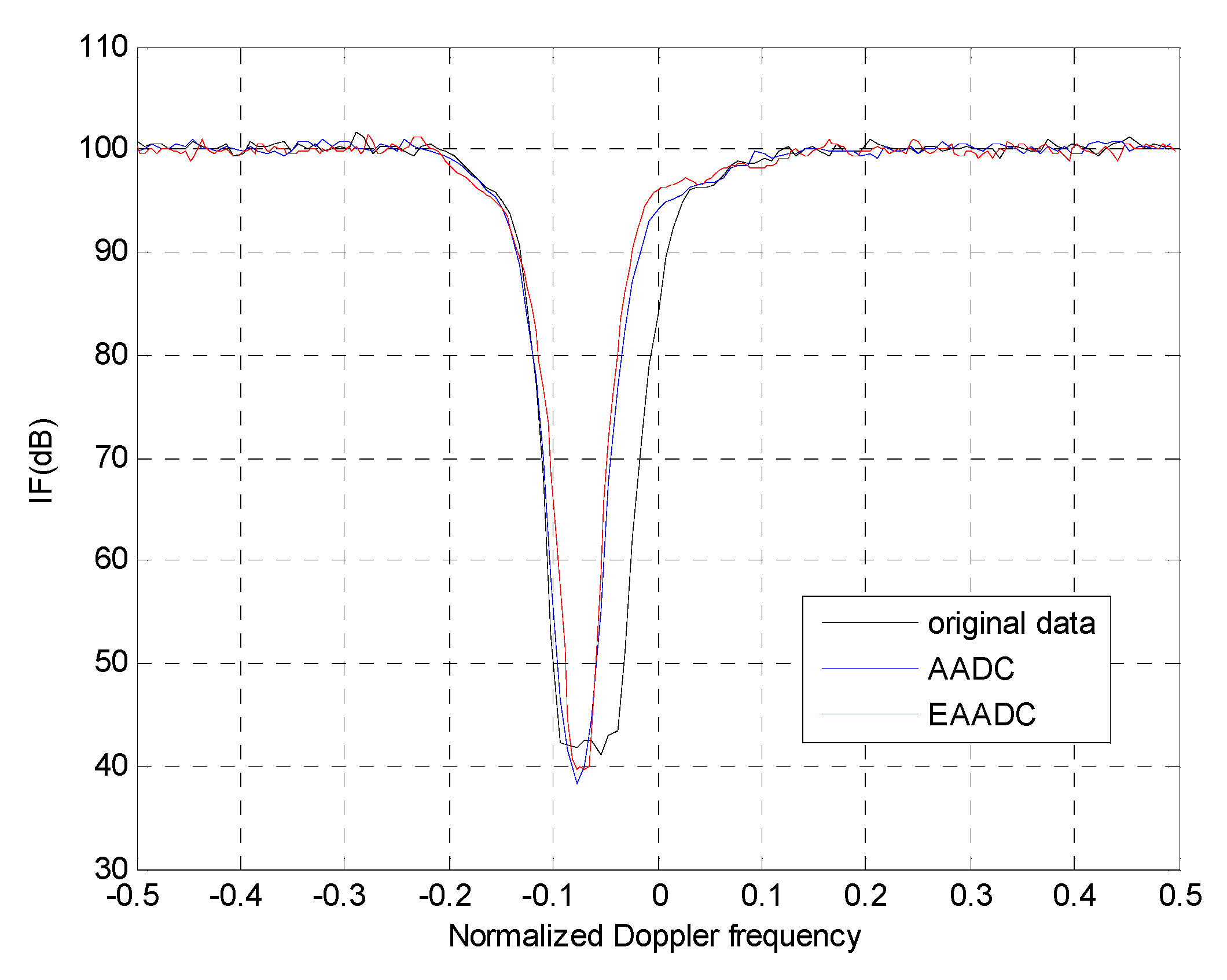
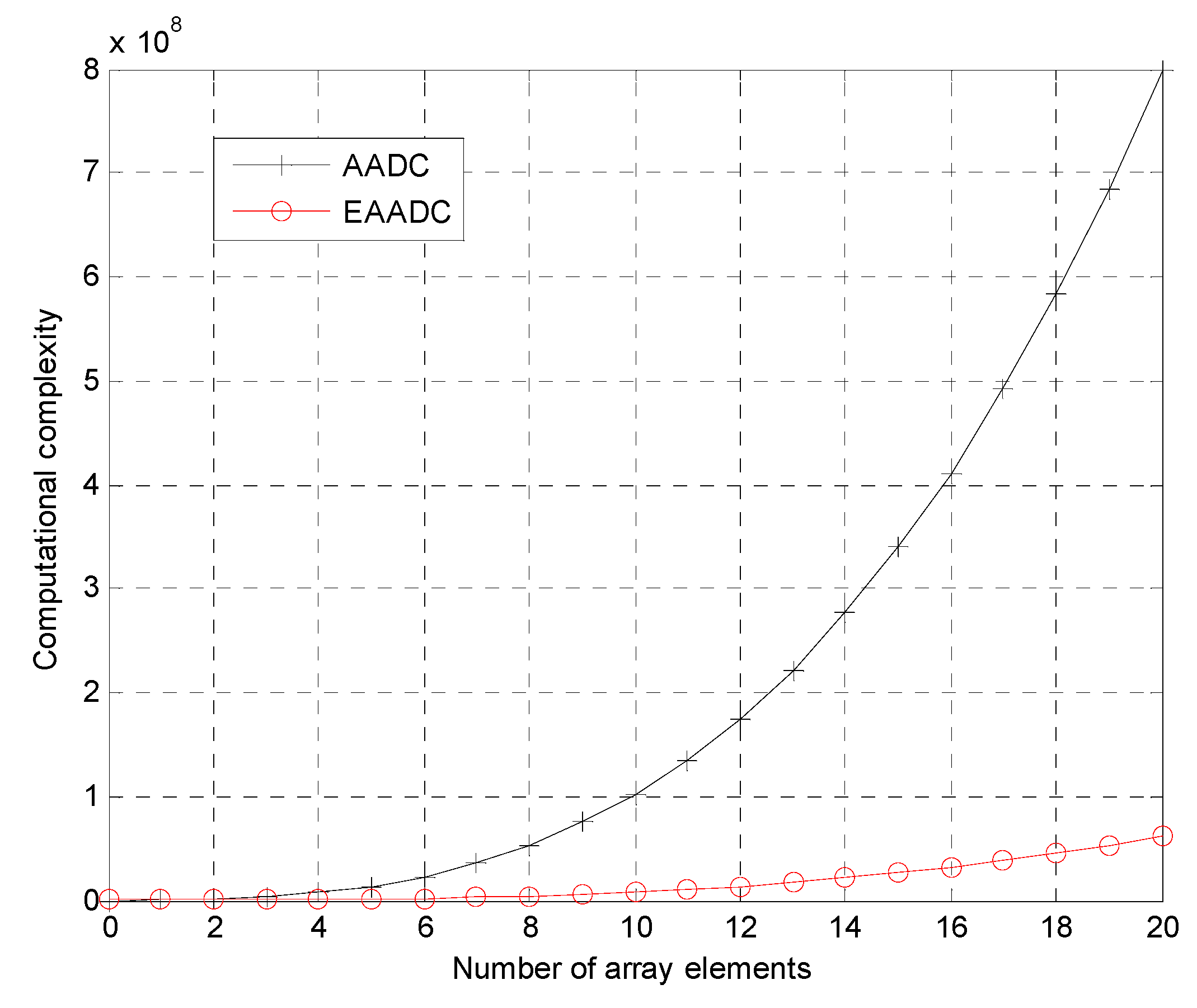
4. Performance Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PRF | 5000 Hz |
| Bandwidth | 5 MHz |
| Array Element Number | 16 |
| Platform Velocity | 130 m/s |
| CPI Pulse Number | 128 |
| Crab angle | 30° |
| Platform Height | 8000 m |
| Element spacing and wavelength ratio | 1/2 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Klemm, R. Principles of Space-Time Adaptive Processing IET, 3rd ed.; The Institution of Engineering and Technology: London, UK, 2002. [Google Scholar]
- Brennan, L.E.; Reed, I.S. Theory of adaptive radar. IEEE Aerosp. Electron. Syst. 1973, 9, 237–252. [Google Scholar] [CrossRef]
- Borsari, G. Mitigating effects on STAP processing caused by an inclined array. In Proceedings of the 1998 IEEE Radar Conference Dallas, Dallas, TX, USA, 11–14 May 1998; pp. 135–140.
- Himed, B.; Zhang, Y.; Hajjari, A. STAP with angle-Doppler compensation for bistatic Airborne radars. In Proceedings of the IEEE National Radar Conference, Long Beach, CA, USA, 25 April 2002; pp. 311–317.
- Hayward, S. Adaptive beamforming for rapidly moving arrays. In Proceedings of the CIE International Conference of Radar, Beijing, China, 8–10 October 1996; pp. 480–483.
- Lapierre, F.D.; Verly, J.G. Registration-based range dependence compensation for bistatic STAP radar. EURASIP J. Adv. Signal Process. 2005, 1, 85–98. [Google Scholar] [CrossRef]
- Fallah, A.; Bakhshi, H. Extension of Adaptive Angle-Doppler Compensation (AADC) in STAP to increase homogeneity of data in airborne bistatic radar. In Proceedings of the International Symposium on Telecommunications (IST), Tehran, Iran, 6–8 November 2012; pp. 367–372.
- Zhao, J.; Zhu, Z. A multiple space angle compensation method for airborne radar with non-side-main-lobelooking uniform linear array. Acta Aeronaut. Astronaut. Sin. 2010, 31, 2216–2221. [Google Scholar]
- Tian, B.; Zhu, D.; Zhu, Z. A fast adaptive angle Doppler compensation method. Acta Aeronaut. Astronaut. Sin. 2011, 32, 1705–1713. [Google Scholar]
- Melvin, W.L.; Himed, B.; Davis, M.E. Doubly adaptive bistatic clutter filtering. In Proceedings of the 2003 IEEE Radar Conference, Huntsville, AL, USA, 5–8 May 2003; pp. 171–178.
- Shen, M.W.; Wang, J.; Wu, D.; Zhu, D.Y. An efficient moving target detection algorithm based on sparsity-aware spectrum estimation. Sensors 2014, 14, 17055–17067. [Google Scholar] [CrossRef] [PubMed]
- Harmanci, K.; Tabrikian, J.; Krolik, J.L. Relationships between adaptive minimum variance beamforming and optimal source localization. IEEE Trans. Signal Process. 2000, 48, 1–12. [Google Scholar] [CrossRef]
- Hu, N.; Ye, Z.; Xu, X. DOA estimation for sparse array via sparse signal construction. IEEE Aerosp. Electron. Syst. 2013, 49, 760–773. [Google Scholar] [CrossRef]
- Sun, K.; Zhang, H.; Li, G. STAP via sparse recovery of clutter spectrum. Acta Electron. Sin. 2011, 39, 1389–1393. [Google Scholar]
- Ali, C.G.; Volkan, C.; James, H.M. Bearing estimation via spatial sparsity using compressive sensing. IEEE Aerosp. Electron. Syst. 2012, 48, 1358–1369. [Google Scholar]
- Dipietro, R. Extended factored space-time processing for airborne radar systems. In Proceedings of Asilomar Conference on Signals, Systems, and Computing, Pacific Grove, CA, USA, 26–28 October 1992; pp. 425–430.
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Edinburgh, UK, 2009. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, M.; Yu, J.; Wu, D.; Zhu, D. An Efficient Adaptive Angle-Doppler Compensation Approach for Non-Sidelooking Airborne Radar STAP. Sensors 2015, 15, 13121-13131. https://doi.org/10.3390/s150613121
Shen M, Yu J, Wu D, Zhu D. An Efficient Adaptive Angle-Doppler Compensation Approach for Non-Sidelooking Airborne Radar STAP. Sensors. 2015; 15(6):13121-13131. https://doi.org/10.3390/s150613121
Chicago/Turabian StyleShen, Mingwei, Jia Yu, Di Wu, and Daiyin Zhu. 2015. "An Efficient Adaptive Angle-Doppler Compensation Approach for Non-Sidelooking Airborne Radar STAP" Sensors 15, no. 6: 13121-13131. https://doi.org/10.3390/s150613121
APA StyleShen, M., Yu, J., Wu, D., & Zhu, D. (2015). An Efficient Adaptive Angle-Doppler Compensation Approach for Non-Sidelooking Airborne Radar STAP. Sensors, 15(6), 13121-13131. https://doi.org/10.3390/s150613121