1. Introduction
Traditionally, differential GPS with tactical or navigation-grade inertial sensors are used in Global Positioning System (GPS) and Inertial Navigation System (INS) integration for precise navigation applications [
1,
2,
3,
4]. This is mainly due to the inherited high accuracy of differential GPS in comparison with the standalone GPS mode. Unfortunately, this requires a relatively nearby base station, which limits the navigation range and increases the cost and complexity of the system. The precise point positioning (PPP) technique is capable of providing decimeter-positioning accuracy without the need for a base receiver [
5]. PPP has been the focus of a number of research groups in the last two decades (see for example, [
6,
7,
8]). To speed up the PPP solution convergence time, a number of PPP ambiguity resolution techniques have been developed [
9,
10,
11]. PPP has been used in a number of applications, including precise surveying, disaster monitoring, offshore exploration, and others [
12,
13,
14]. On the inertial side, recent advances in micro-electro-mechanical sensors (MEMS) technology enabled the development of a generation of low-cost inertial sensors. MEMS sensors are characterized by their small size, light weight and low cost, in comparison with high-end inertial sensors. However, MEMS sensors generally have poorer performance compared with high-end inertial navigation unit (IMU) due to the significantly higher errors and biases affecting these low-cost inertial sensors.
Commonly, the extended Kalman filter (EKF) is considered as the estimation filter for GPS/INS integration (e.g., [
3,
4,
15]). In EKF, the non-linear system and observation models are linearized around the updated navigation parameters using the first-order Taylor series expansion, under the assumption that the noise is Gaussian. However, as a result of neglecting higher order terms, EKF might fail to produce a reliable estimation solution, especially during GPS outages. This is particularly the case when low-cost MEMS-based inertial measurement units (IMU) are used. The iterated extended Kalman filter (IEKF) was considered by a number of researchers, e.g., [
16,
17] which attempts to improve the linear approximation of the observation model through iterative re-linearization. Unfortunately, the IEKF does not overcome the convergence problem completely.
The unscented Kalman filter (UKF) was introduced by [
18] as a linear regression estimation filter. UKF propagates a deterministically a fixed set of sigma points with appropriate weights through the non-linear motion and observation models to capture the system a posteriori mean and covariance estimates [
19]. However, similar to EKF, the algorithm is still dealing with the assumption of Gaussian distribution. In contrast to linearization filters, Particle filtering (PF) avoids the linearization of the system models. Rather, it obtains an approximate estimation solution for the nonlinear model. In addition, PF can accommodate non-Gaussian distributions noise. As a result, it can be considered as a non-parametric estimation method for non-linear/non-Gaussian applications. A drawback of the PF, however, is that it is featured by a large computational cost, which represents the main limitation in practical use. Nevertheless, with the advances in computer technology, a number of researchers successfully used it for GPS/INS integration (e.g., [
20,
21,
22,
23]).
To overcome the linearization and computational cost problems, recent research focused on fusing PF with either of EKF or UKF to form the extended particle filter (EPF) or the unscented particle filter (UPF), respectively [
24,
25]. Haug [
24] used EKF or UKF to produce a posteriori mean and covariance estimates, which are then employed to produce the PF importance density function for particle generation. Then, the normalized importance weights of the particles are calculated to refine the system
posteriori estimates. Although, this technique significantly reduces the number of particles and processing time compared with traditional PF, it confines the PF importance density function to Gaussian distribution. As such, the expected enhancement can be considered limited [
26]. According to Simon [
25], a bank of EKFs or UKFs can used for each particle combined with the likelihood function to derive the system
a posteriori estimates. This technique can significantly reduce the number of needed particles while reserving the non-Gaussian natural of the system noise.
In this research, a UPF is developed, based on the approach proposed by Simon [
25], to merge GPS measurements, through un-differenced PPP technique, and the inertial sensor measurements. All of the available GPS observations, including pseudorange, carrier-phase, and corrected Doppler observations, are used. The performance of the developed filter is compared with that of the traditional filters, including the standard EKF, UKF, and PF, both when GPS is available and when there is a complete GPS outage, are encountered. It is shown that, as long as no GPS outages are encountered, the performance of all estimation filters is comparable. However, during GPS outages, the performance of UPF is superior to the traditional estimation filters. On average, about 15% positioning accuracy enhancement is obtained through UPF, in comparison with EKF. In addition, the number of particles needed to capture an accurate estimation is significantly reduced when UPF is used, in comparison with the traditional PF, which in turn reduces the computational cost significantly.
2. GPS PPP/MEMS Measurement and Motion Models
Tightly coupled (TC) architecture is implemented in this research, adopting a central filter to process the GPS raw measurements (pseudorange, carrier-phase, and Doppler) and the IMU measurements to produce estimates of the state vector including position, velocity, and attitude. The mathematical model of the inertial navigation system is commonly described in the framework of linear dynamic systems. The dynamic behavior of such systems can be described using a state-space representation. For this purpose, a system of non-linear first-order differential equations can be described as [
27]:
where,
is the position vector, latitude, longitude and altitude;
is the velocity vector in the East, North and Up (ENU) reference frame,
is the kinematic acceleration vector in the ENU reference frame;
represents the effect of the motion of the ENU frame with respect to the ECEF frame;
is the Coriolis acceleration vector;
is the gravity vector, including the gravitation term and the centripetal term related to the Earth rotation; and
is the specific force vector in the body frame, which is measured by the accelerometers. The matrix
is the skew-symmetric matrix of rotation rate vector of the Earth, which can be expressed in the ENU frame as:
The matrix
is the skew-symmetric matrix of the rotation rate vector of the ENU frame with respect to ECEF frame, expressed in the ENU frame as:
The matrix
is the skew-symmetric matrix of the rotation rate vector of the body frame with respect to the ECI frame
, expressed in the body reference, which is measured by the gyros. The matrix
is the skew-symmetric matrix of the rotation rate of the navigation frame with respect to inertial frame
expressed in the body frame, which is computed combining
and
transforming the result in the body frame as follows:
The bias and scale factor drifts are modeled as a first-order Gauss-Markov process, which can be formed as follows:
where the subscript
“i” indicates the axis;
and
are the correlation times for the accelerometers and gyros, respectively; and
and
are the Gauss-Markov process driving noises, of which spectral densities are
and
. The clock errors unique to the GPS measurements, including the clock offset and drift are modeled by [
28]:
where
and
are the clock offset and drift driving noise with spectral density
and
, respectively. The measurement model of the GPS/INS filter in the TC architecture has the typical form:
where
is the corrected un-differenced ionosphere-free GPS measurements;
h(xk) is the nonlinear measurement model which relates the stated vector x with the observation vector y and
w is the Gaussian white noise with zero mean and covariance matrix
.
The mathematical model for the un-differenced ionosphere-free combination of code and carrier phase measurements can be written as:
where
and
are GNSS pseudorange measurements on
and
, respectively;
and
are the GNSS carrier phase measurements on
and
, respectively;
and
are the clock errors for receiver and satellite, respectively;
and
are frequency-dependent code hardware delay for receiver and satellite, respectively;
and
are frequency-dependent carrier phase hardware delay for receiver and satellite, respectively;
e,
ε are relevant system noise and un-modeled residual errors; and
is the ambiguity term for phase measurements. For the un-differenced ionosphere free linear combination, this term is not integer due to the non-integer nature of the combination coefficients,
,
where
and
are the
and
non-integer ambiguity parameters, including the initial phase biases at the satellite and the receiver, respectively;
and
are the wavelengths of the
and
carrier frequencies, respectively; c is the speed of light in vacuum;
T is the tropospheric delay component; ρ is the true geometric range from the antenna phase center of the receiver at reception time to the antenna phase center of the satellite at transmission time.
A and
B are frequency dependent factors
and
.
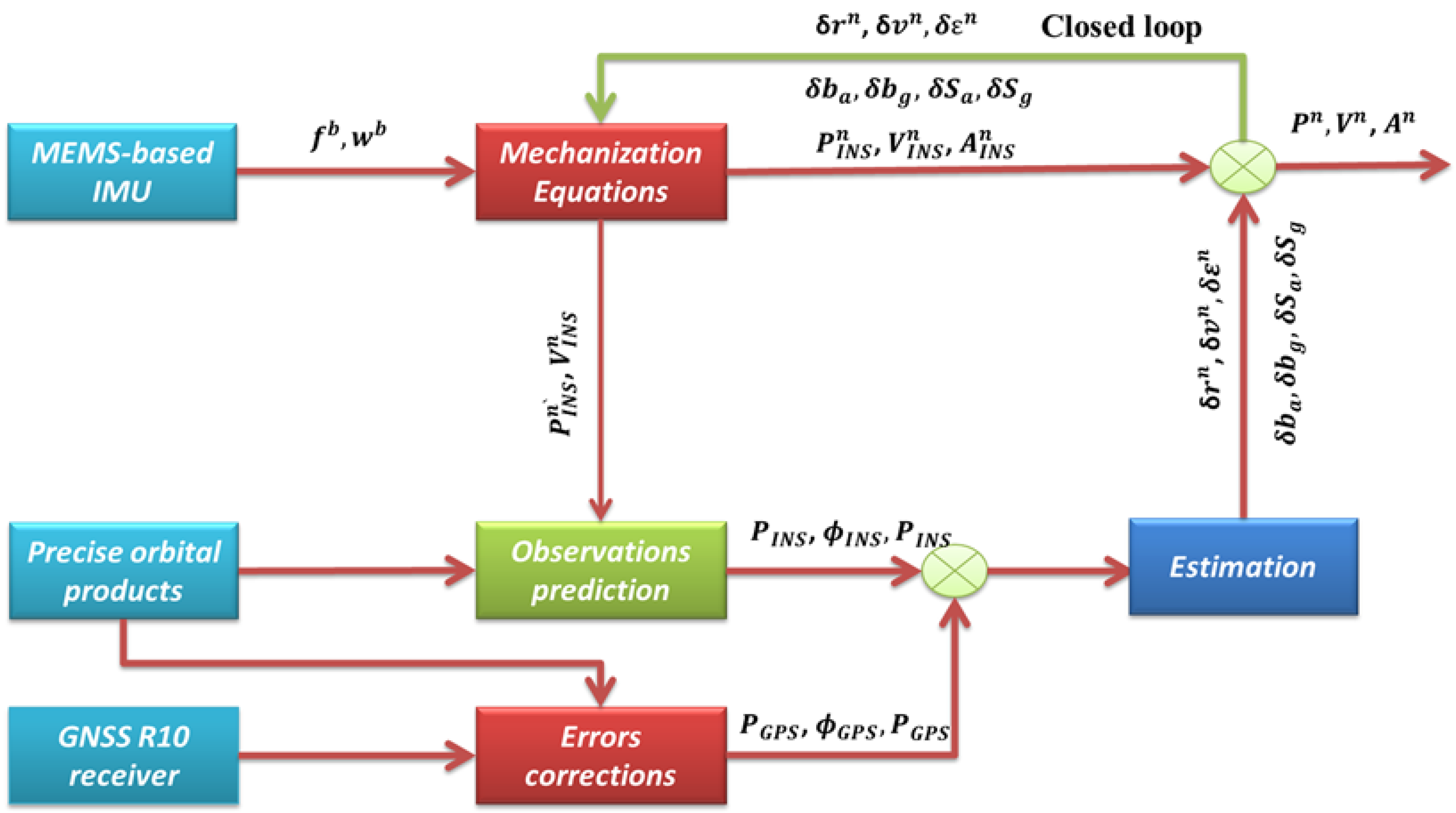
With the availability of the final IGS orbital products corrected for the effect of the Earth’s rotation during signal transit, the outputs of position and velocity from the INS mechanization are used to predict the pseudorange, phase, and Doppler measurements through the non-linear observation equations. The UNB3 tropospheric model, consisting of the Saastamoinen vertical propagation delay model and Niell mapping function, is used to account for the tropospheric error [
29]. The effects of ocean loading, Earth tide, carrier-phase windup, sagnac, relativity, and satellite antenna phase-center variations are accounted for using existing models [
30]. In addition, the satellite clock error is accounted for using the final IGS clock products. Considering the above corrections, the corrected pseudorange, carrier phase and Doppler measurements from GPS, as well as the INS-predicted measurements, are processed by the integration filter to estimate the INS state vector. Finally, the obtained INS state estimates are fed back to the INS mechanization using the closed loop approach. The architecture of the proposed tightly coupled integrated system is shown in
Figure 1.
Figure 1.
Flow chart of the proposed tightly coupled GPS PPP/MEMS integrated system.
Figure 1.
Flow chart of the proposed tightly coupled GPS PPP/MEMS integrated system.
4. Results and Discussion
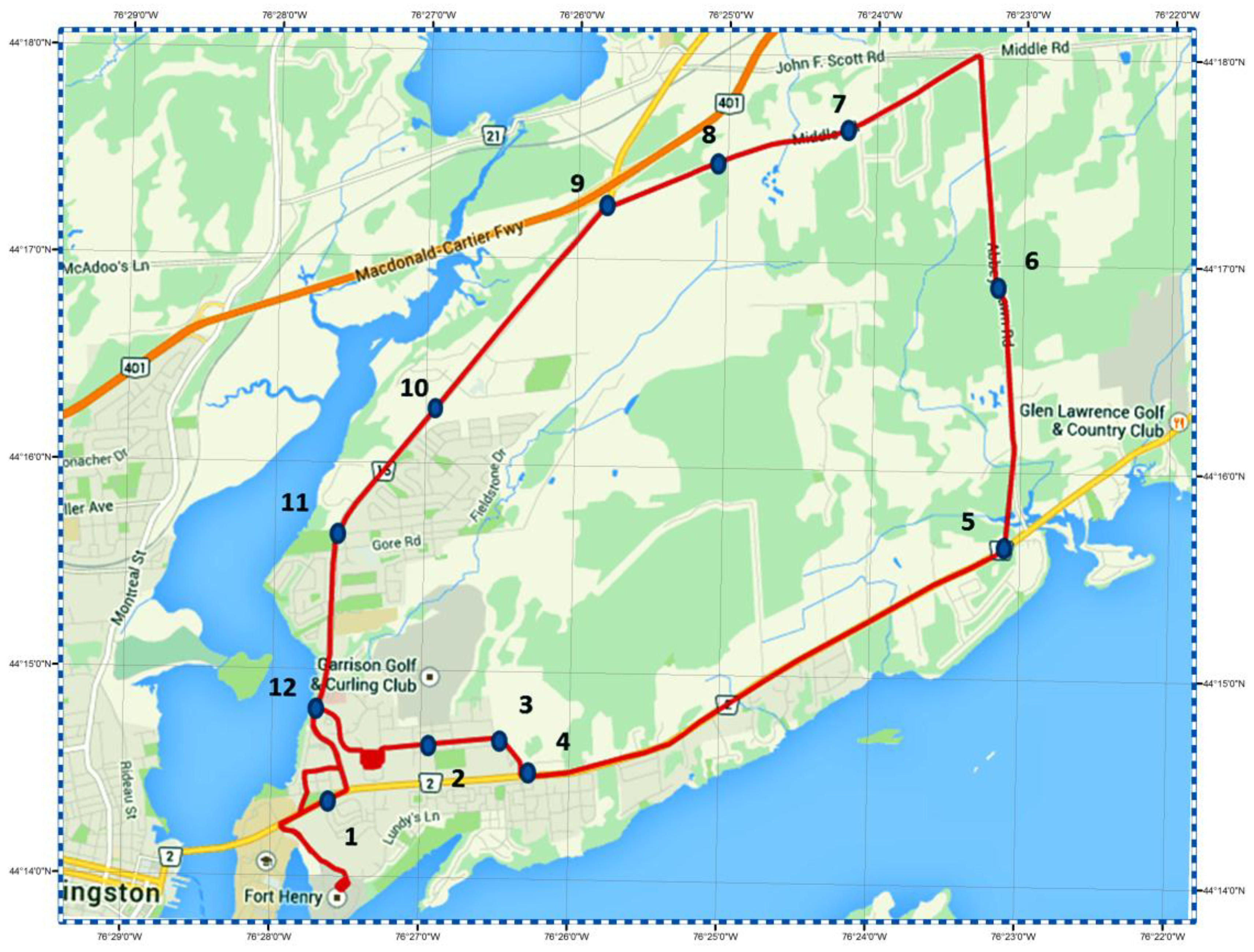
A vehicular test was conducted in downtown Kingston, Ontario, to evaluate the performance of the developed integrated GPS-PPP/MEMS-based inertial system. The equipment used comprises the NovAtel SPAN-CPT system and the Trimble R10 GNSS receiver. The SPAN-CPT system consists of NovAtel OEM4 GPS receiver and a MEMS IMU containing three MEMS-based accelerometers and three fiber optic gyros. A differential carrier phase-based GPS/MEMS-based INS solution was obtained to provide the reference solution. In order to create this reference solution, a Trimble R7 GNSS receiver was setup at a point with precisely known coordinates, which was used as a base station. Dual-frequency raw GPS pseudorange, carrier phase and Doppler measurements were logged at a 1 Hz rate, while the IMU raw data were logged at a 100 Hz rate. The duration of the trajectory test was approximately 55 min.
Figure 2 shows the trajectory test area.
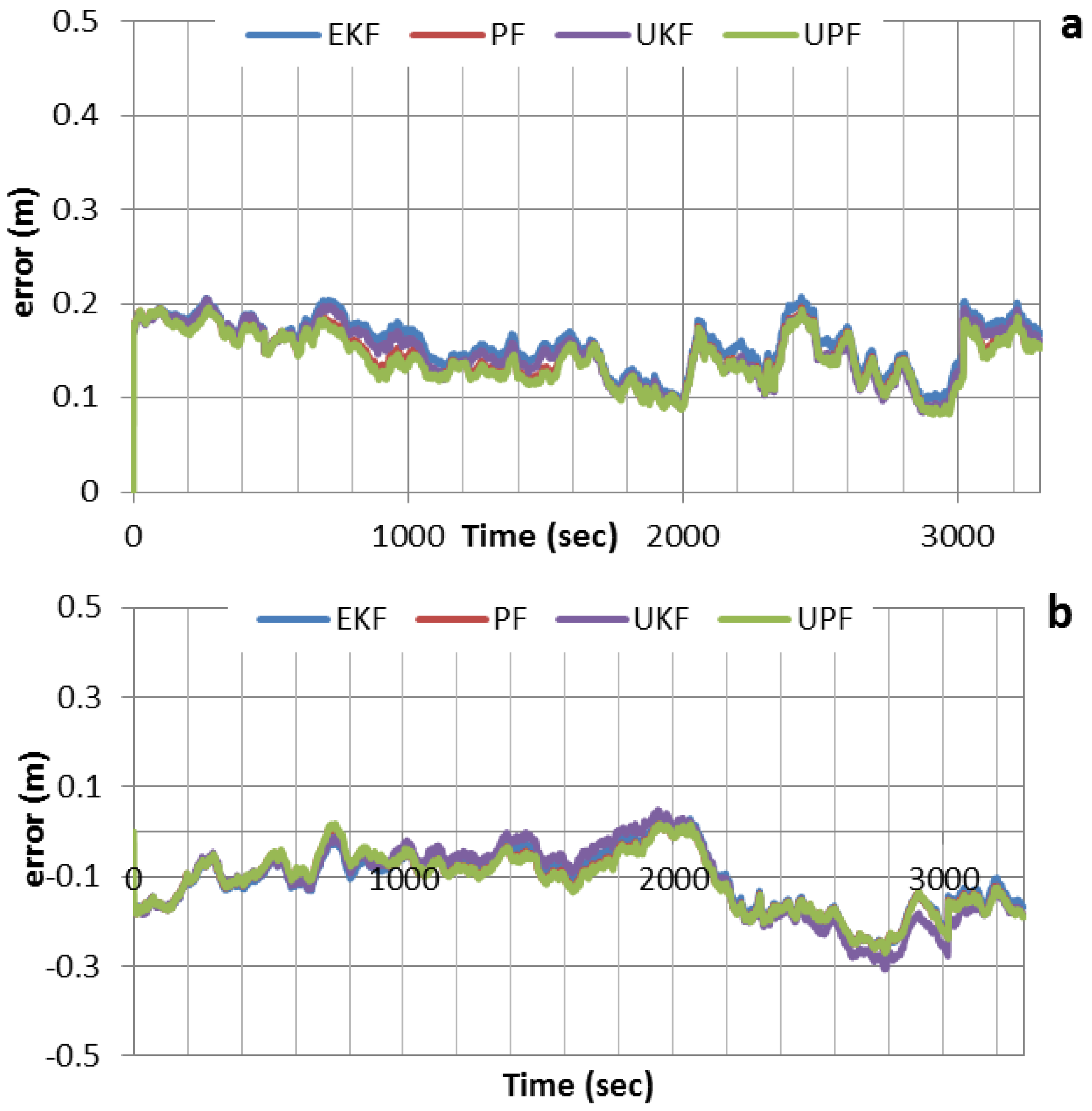
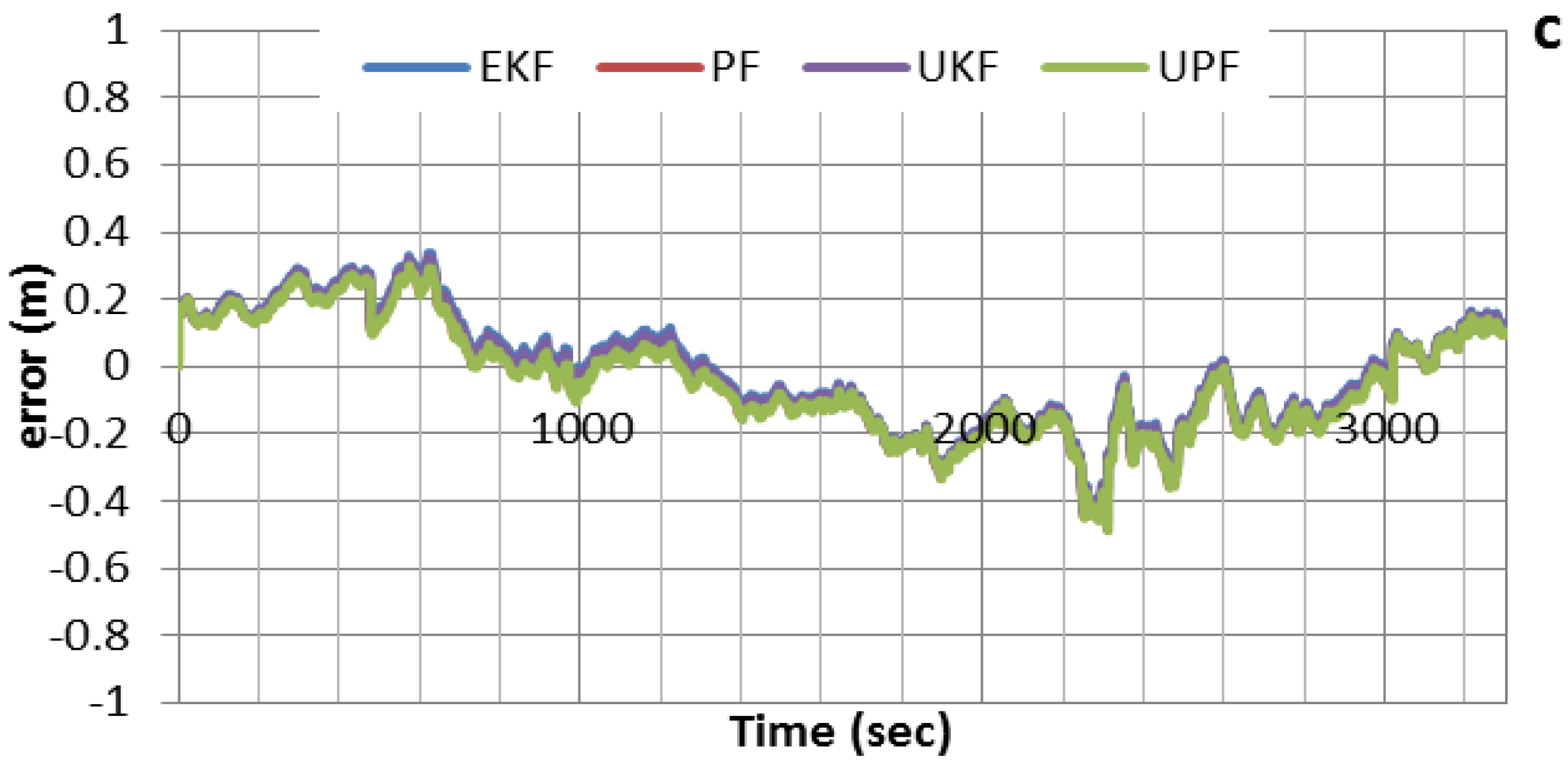
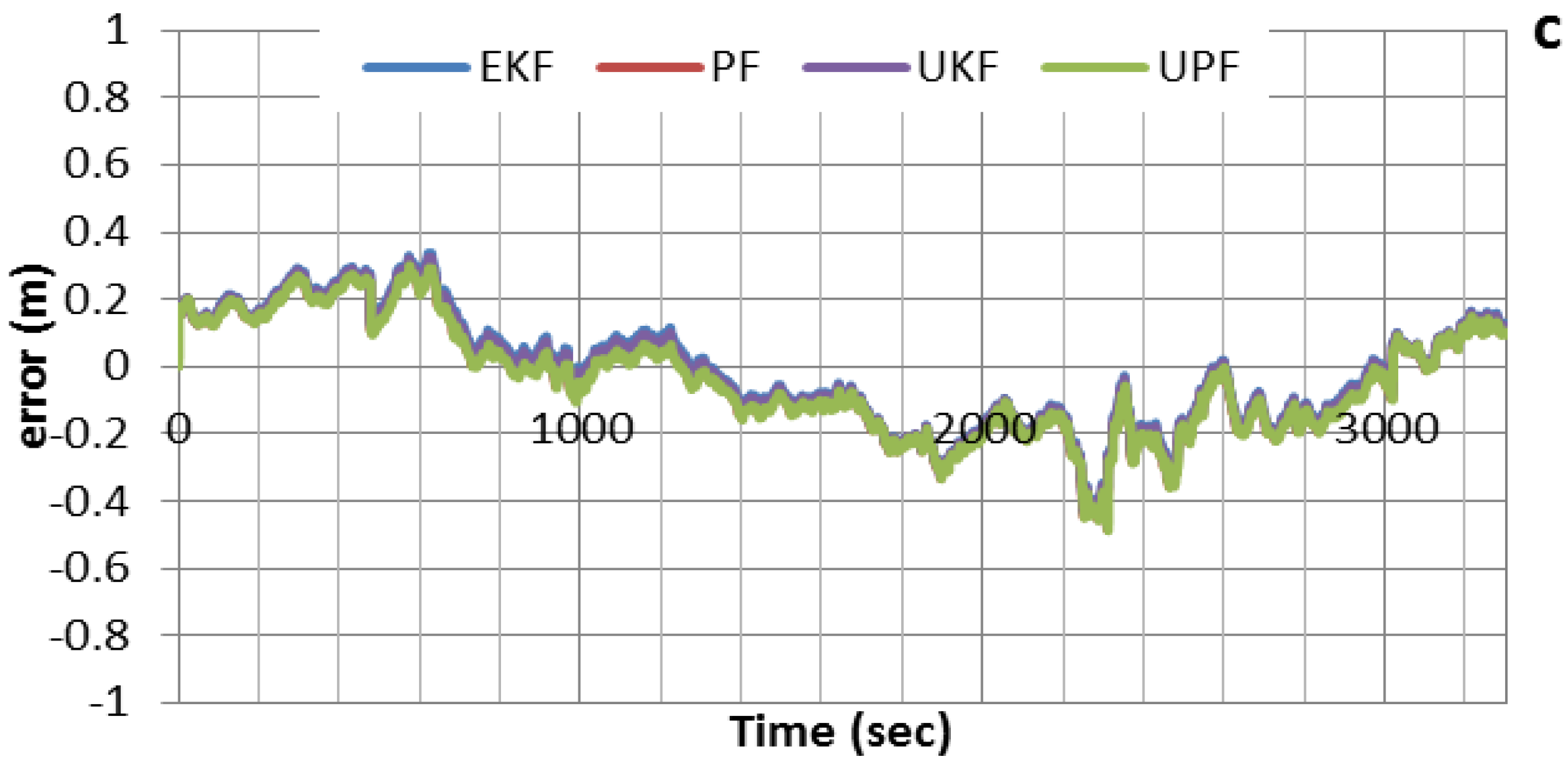
Figure 3 shows the positioning solution of the newly developed integrated system for latitude, longitude and altitude, which are compared with the reference solution. As can be seen, all filters can achieve decimeter-level positioning accuracy when no GPS outages are inserted. The results obtained by the various filters agree to the few-centimeter level, which indicate that the effect of non-linearity on the positioning accuracy is marginal. This means that the use of EKF, which is relatively easier to implement, would be advantageous from the estimation cost point of view.
Figure 2.
Vehicle test trajectory and simulated complete GPS outages.
Figure 2.
Vehicle test trajectory and simulated complete GPS outages.
Figure 3.
Positioning errors for various filters, with no GPS outages inserted. (a) Positioning errors in latitude; (b) Positioning errors in longitude; (c) Positioning errors in altitude.
Figure 3.
Positioning errors for various filters, with no GPS outages inserted. (a) Positioning errors in latitude; (b) Positioning errors in longitude; (c) Positioning errors in altitude.
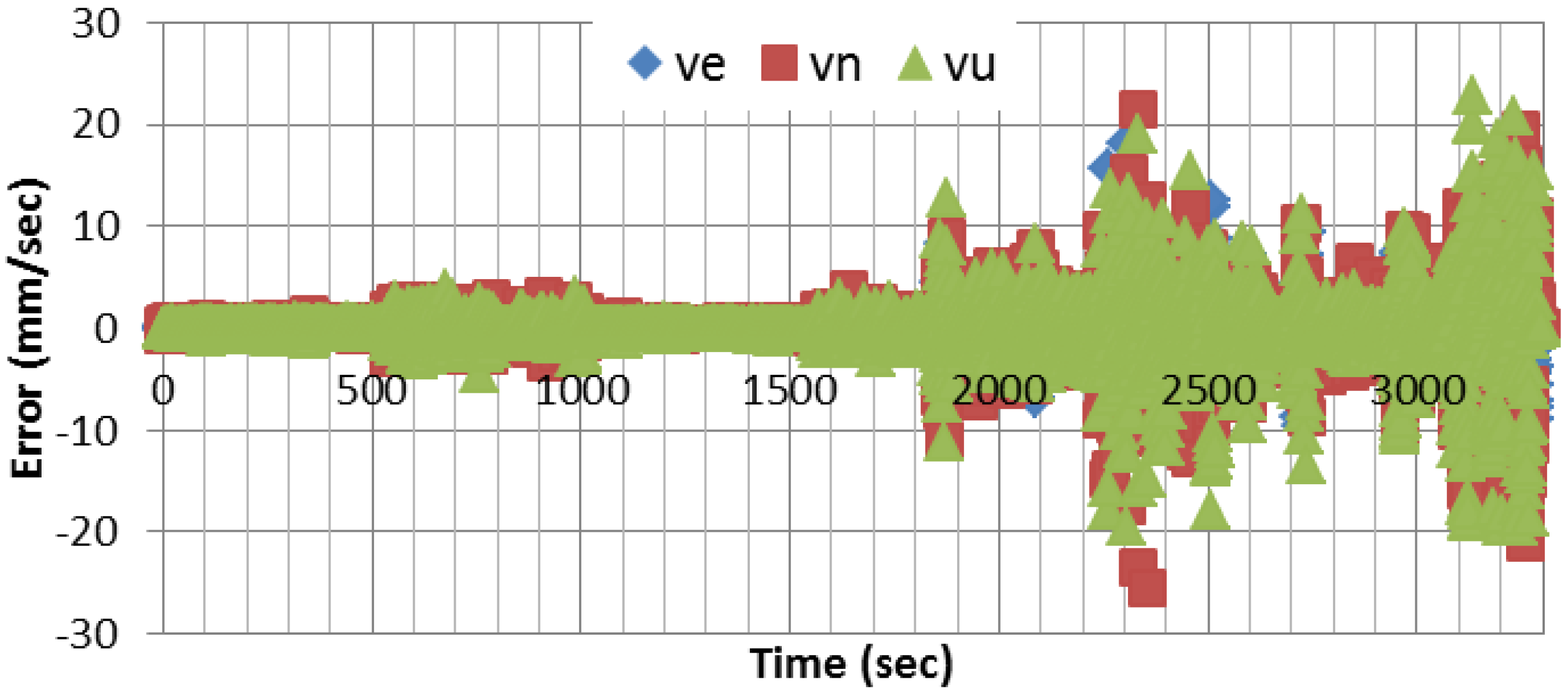
Figure 4 shows the velocity errors in east, north, and up directions, respectively, using EKF as a central filter. In comparison with the differential mode, the results show that centimeter/sec-level accuracy can be achieved using a single receiver.
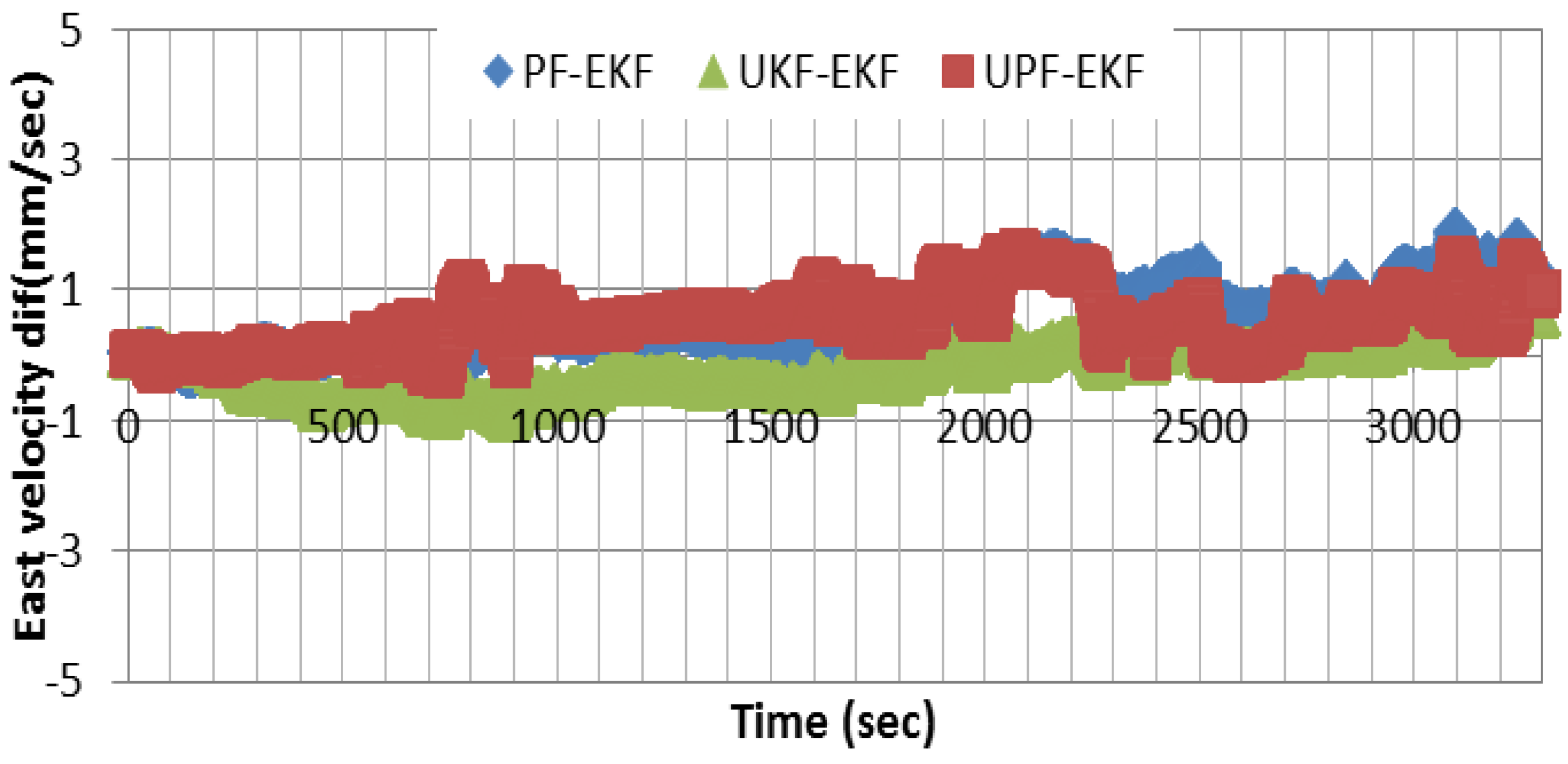
Figure 5 shows the difference between the east component of the velocity solutions obtained through PF and UKF, respectively, and that of EKF. As can be seen, the solutions agree to the millimeter/sec-level. Similar results are obtained for the other two components.
Figure 4.
Velocity estimation errors.
Figure 4.
Velocity estimation errors.
Figure 5.
Difference between UKF, PF, and UPF east velocity estimation results and the altitude estimated using EKF.
Figure 5.
Difference between UKF, PF, and UPF east velocity estimation results and the altitude estimated using EKF.
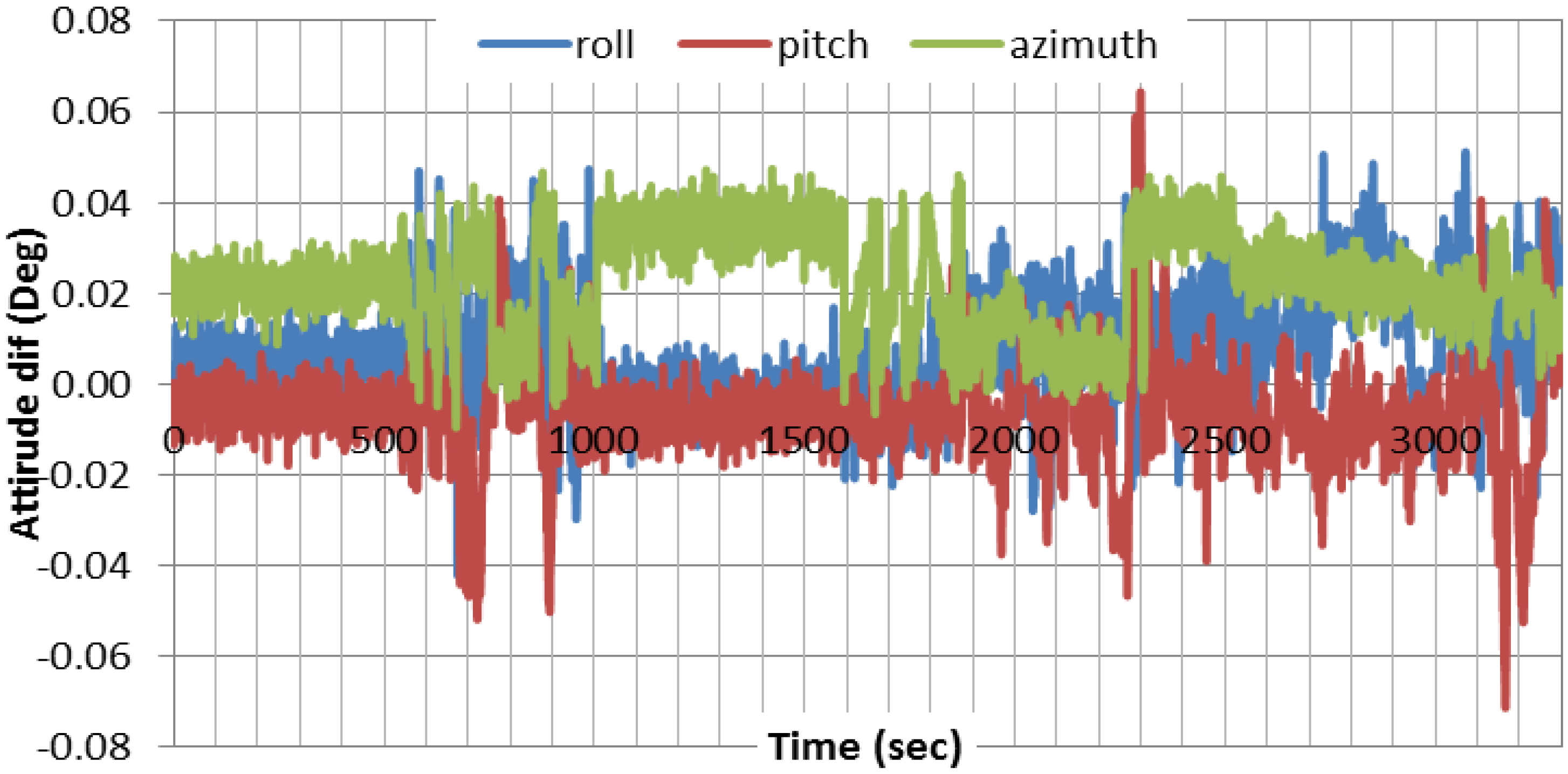
For attitude determination, because of the absence of the external aid in our case, the attitude accuracy depends mainly on the velocity estimation. This is especially correct for the roll and pitch components because of their strong coupling with the horizontal velocities in east and north directions. The accuracy of the estimated azimuth depends mainly on the quality of the gyros used.
Figure 6 shows the results of the attitude components, differenced with respect to the differential-based solution, using EKF. As can be seen, the two solutions agree to a high degree of accuracy.
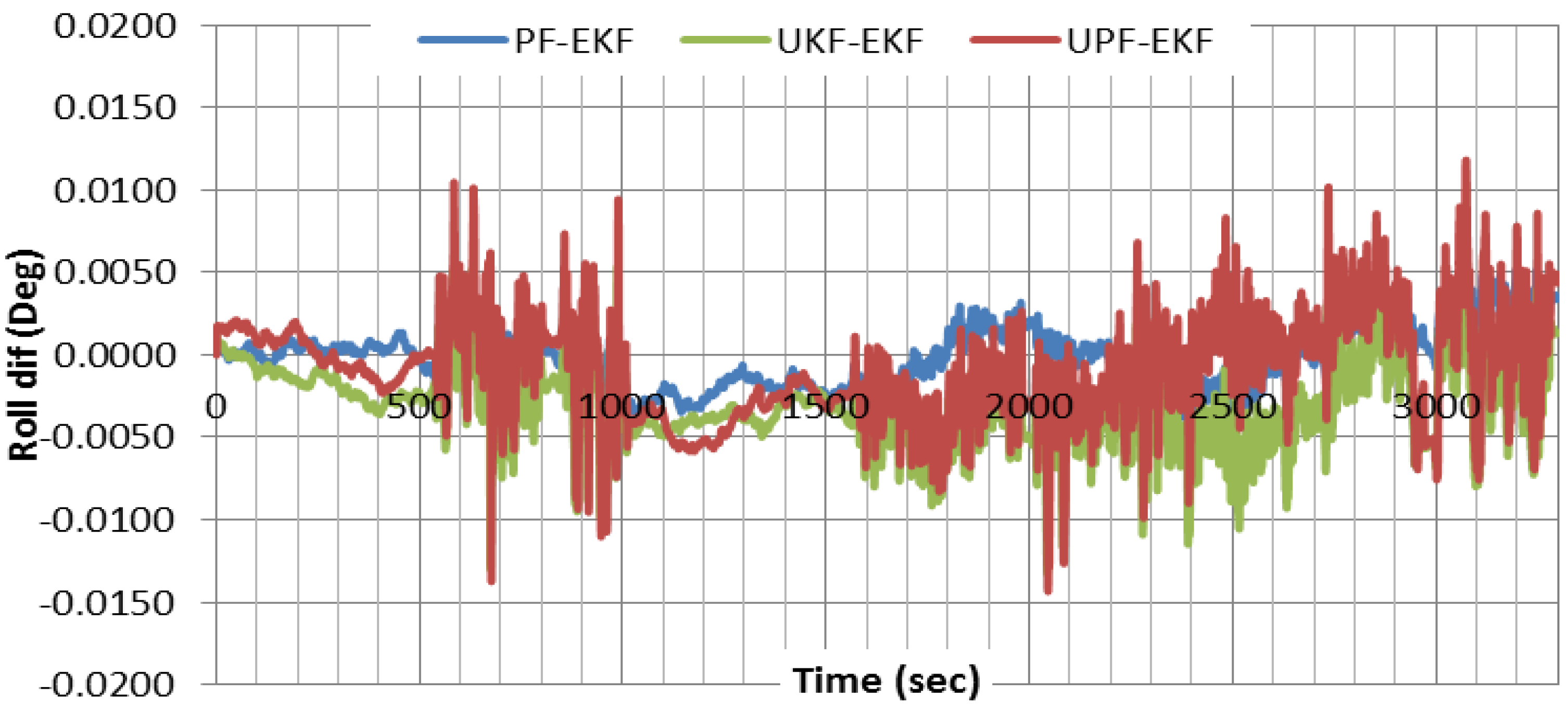
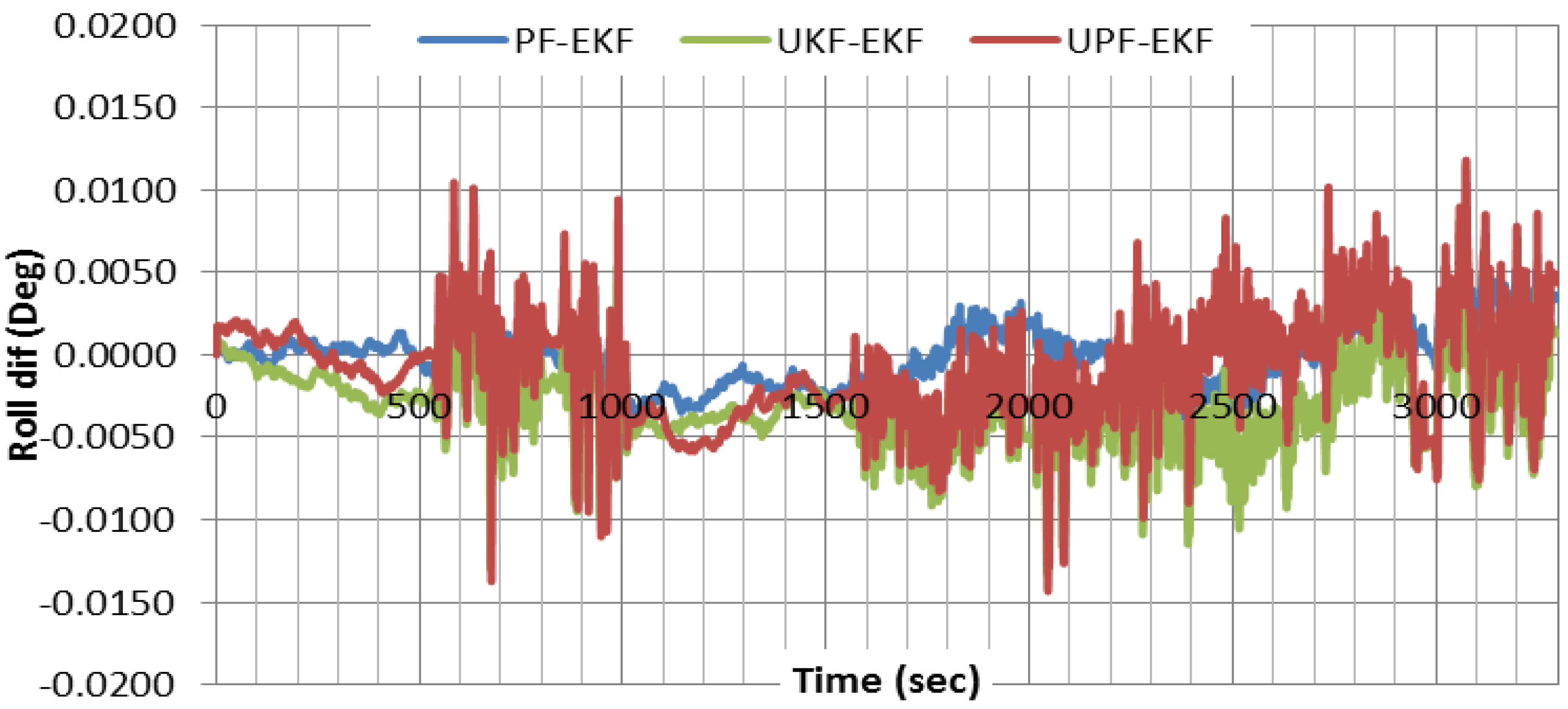
Figure 7 compares the roll results obtained through nonlinear filters with those of EKF. As can be seen, all three filters provide comparable roll results. Similar results are obtained for other attitude components.
Figure 6.
Attitude estimation results using EKF, referenced to differential-based integrated system.
Figure 6.
Attitude estimation results using EKF, referenced to differential-based integrated system.
Figure 7.
Comparison of roll component results obtained through various estimation filters.
Figure 7.
Comparison of roll component results obtained through various estimation filters.
Based on the positioning, velocity, and attitude results presented above, we can conclude that, when GPS is available, the contribution of the computationally expensive nonlinear filters, such as PF and UPF, is not significant. In other words, EKF, which is relatively easier to implement, would provide a more efficient solution for integrating GPS and MEMS-based inertial measurements.
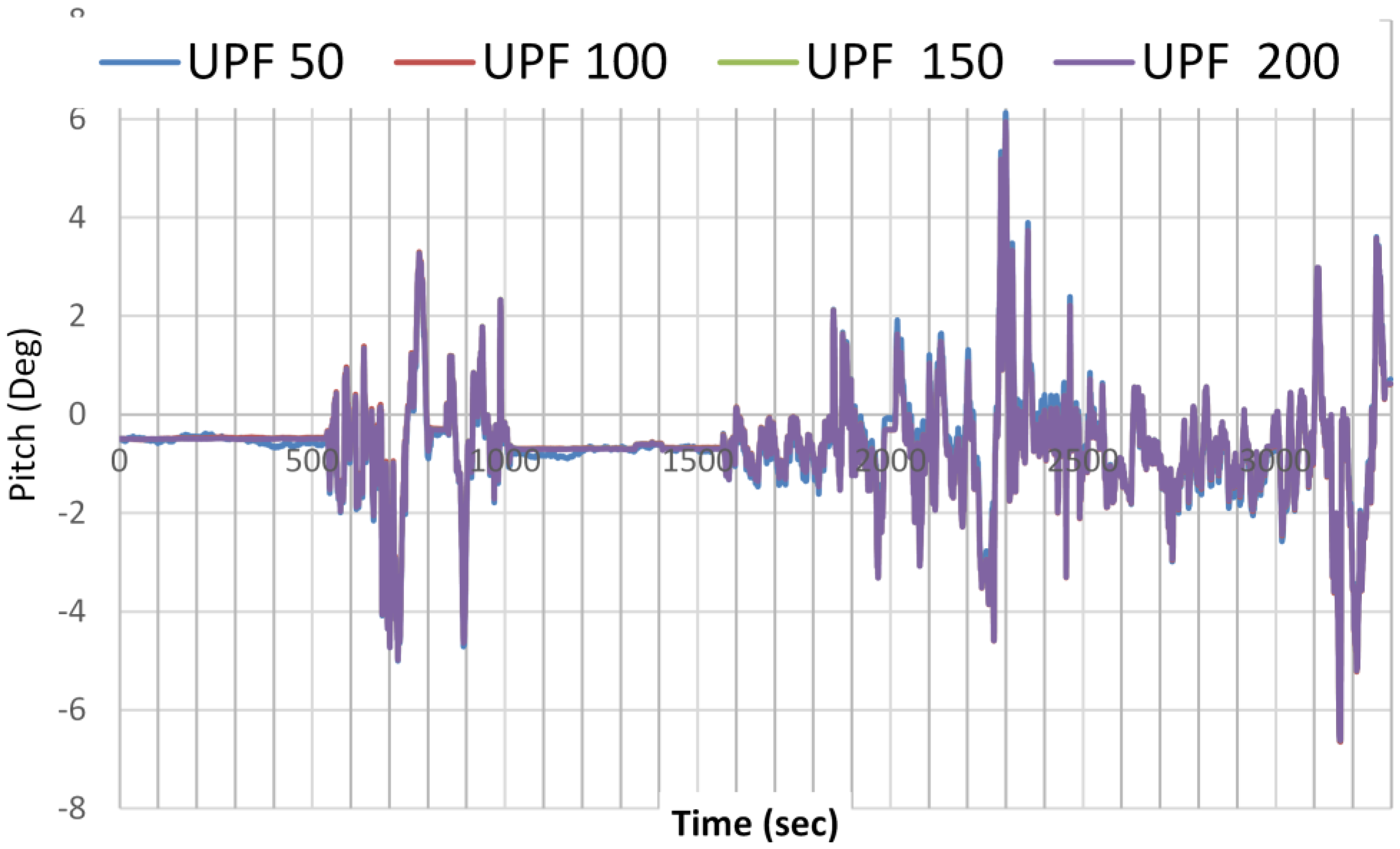
The advantage of using UPF over PF is that the number of particles needed to capture an accurate estimation is reduced. UPF sped up the navigation parameters estimation convergence with small number of particles needed.
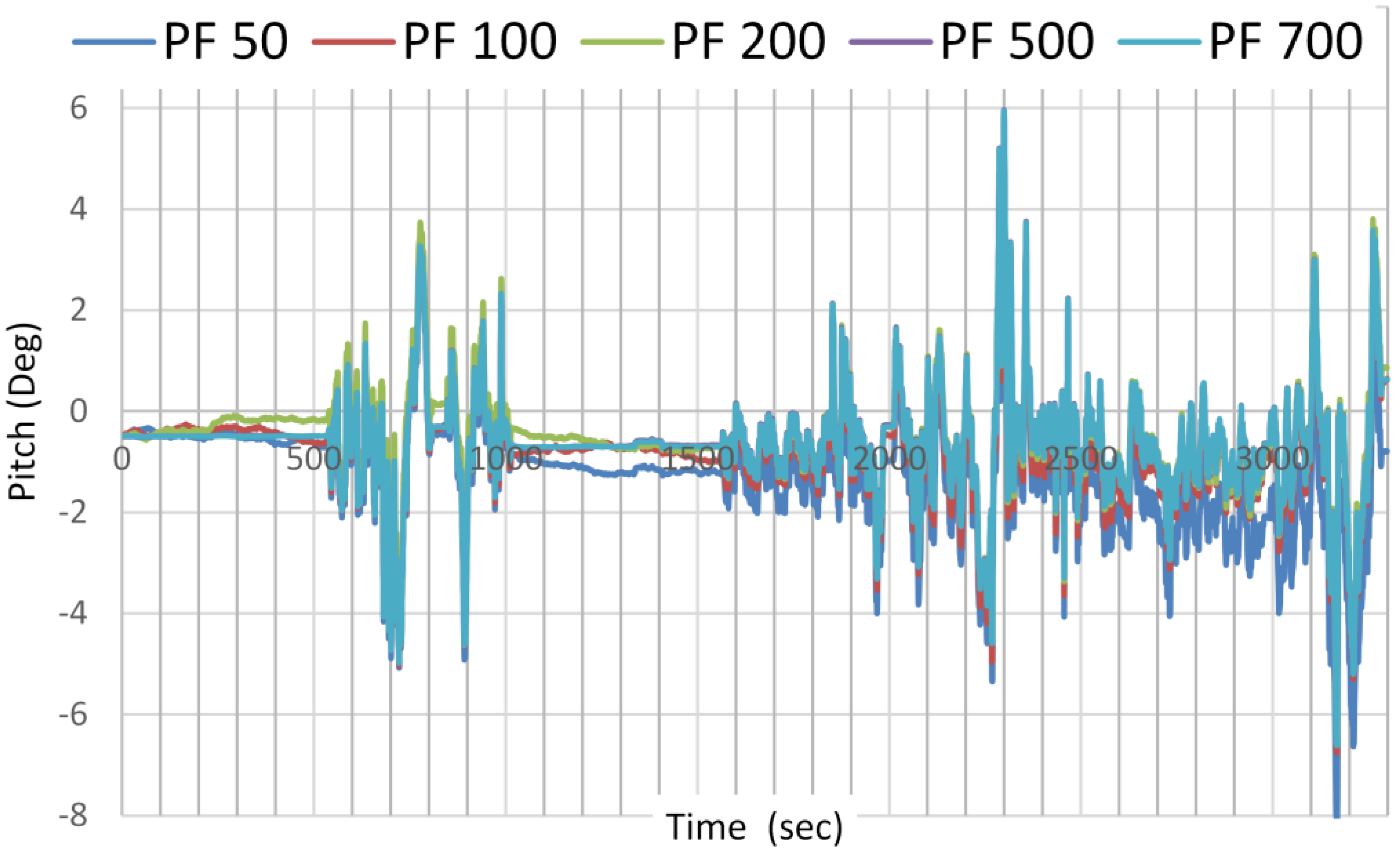
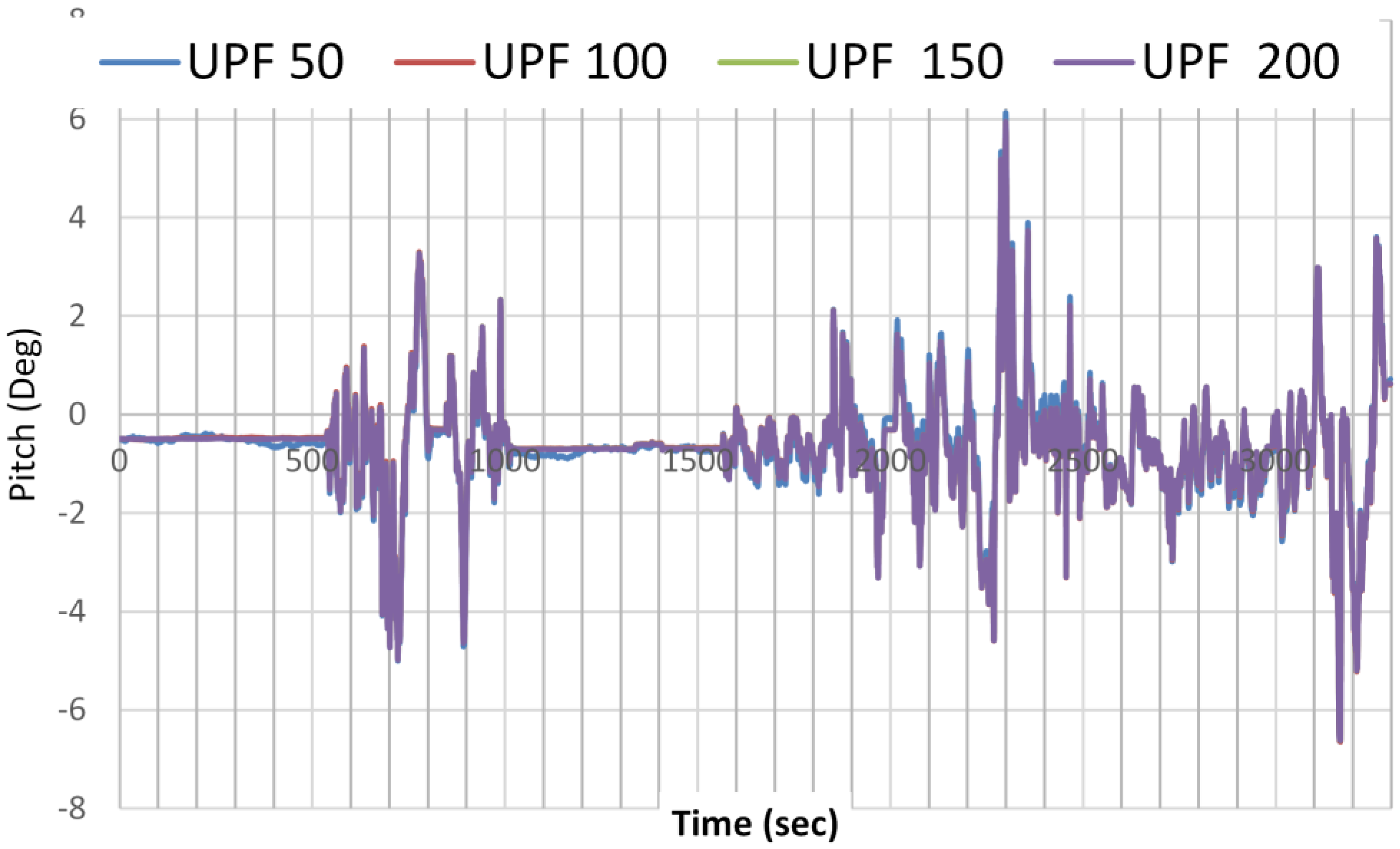
Figure 8 and
Figure 9 show the estimation results of the pitch angle, as an example, on the number of samples needed for PF and UPF. While 500 particles are needed for PF to detect the best estimate of the parameter, only 100 particles are needed for UPF to detect the same. For UPF, increasing the number of particles does not significantly enhance the estimation accuracy.
Figure 8.
Pitch angle estimation as a function of number of samples used by PF.
Figure 8.
Pitch angle estimation as a function of number of samples used by PF.
Figure 9.
Pitch angle estimation as a function of number of samples used by UPF.
Figure 9.
Pitch angle estimation as a function of number of samples used by UPF.
To simulate challenging positioning conditions through the test trajectory, including high and low speeds, twelve simulated GPS outages of 60 s each are introduced as shown in
Figure 1.
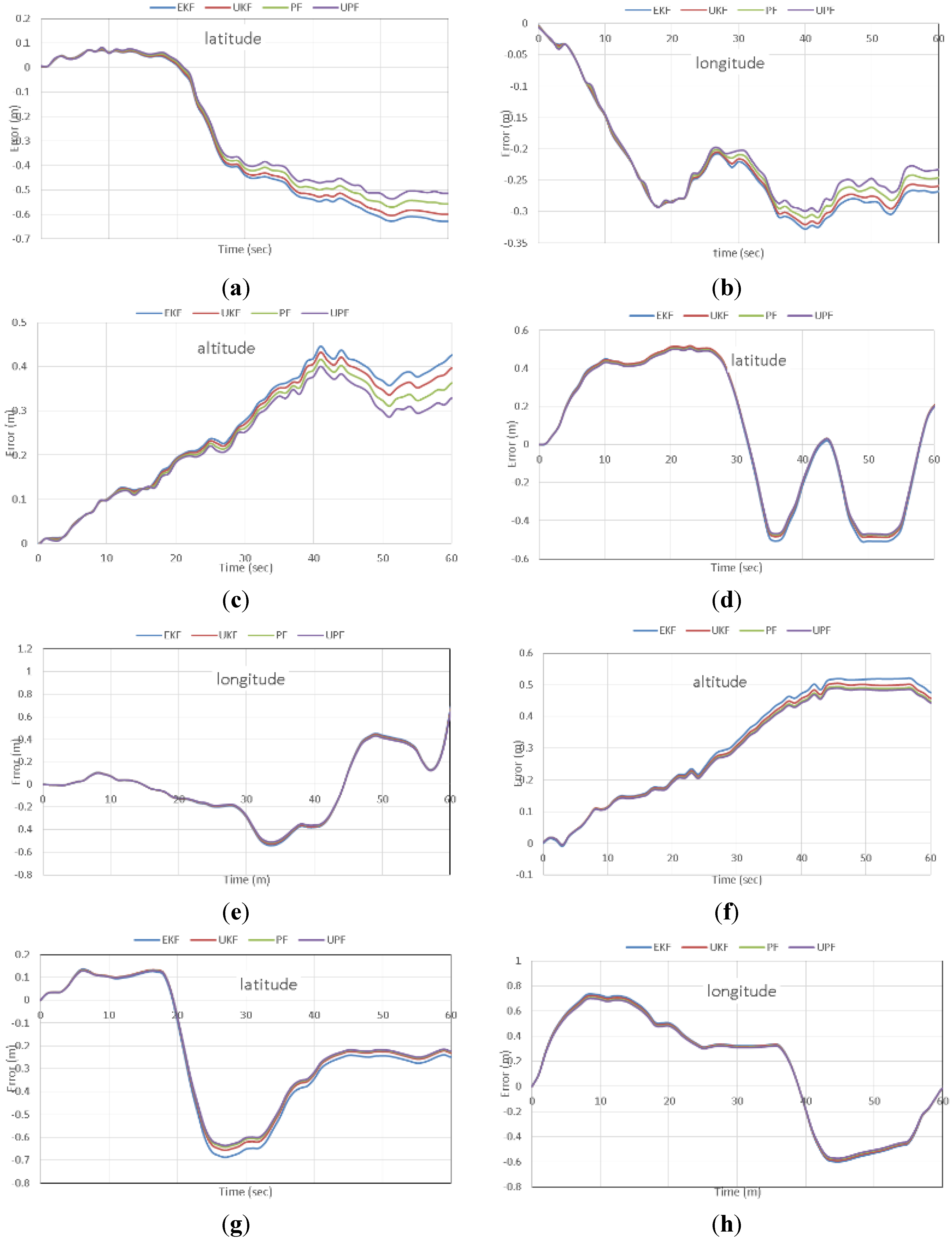
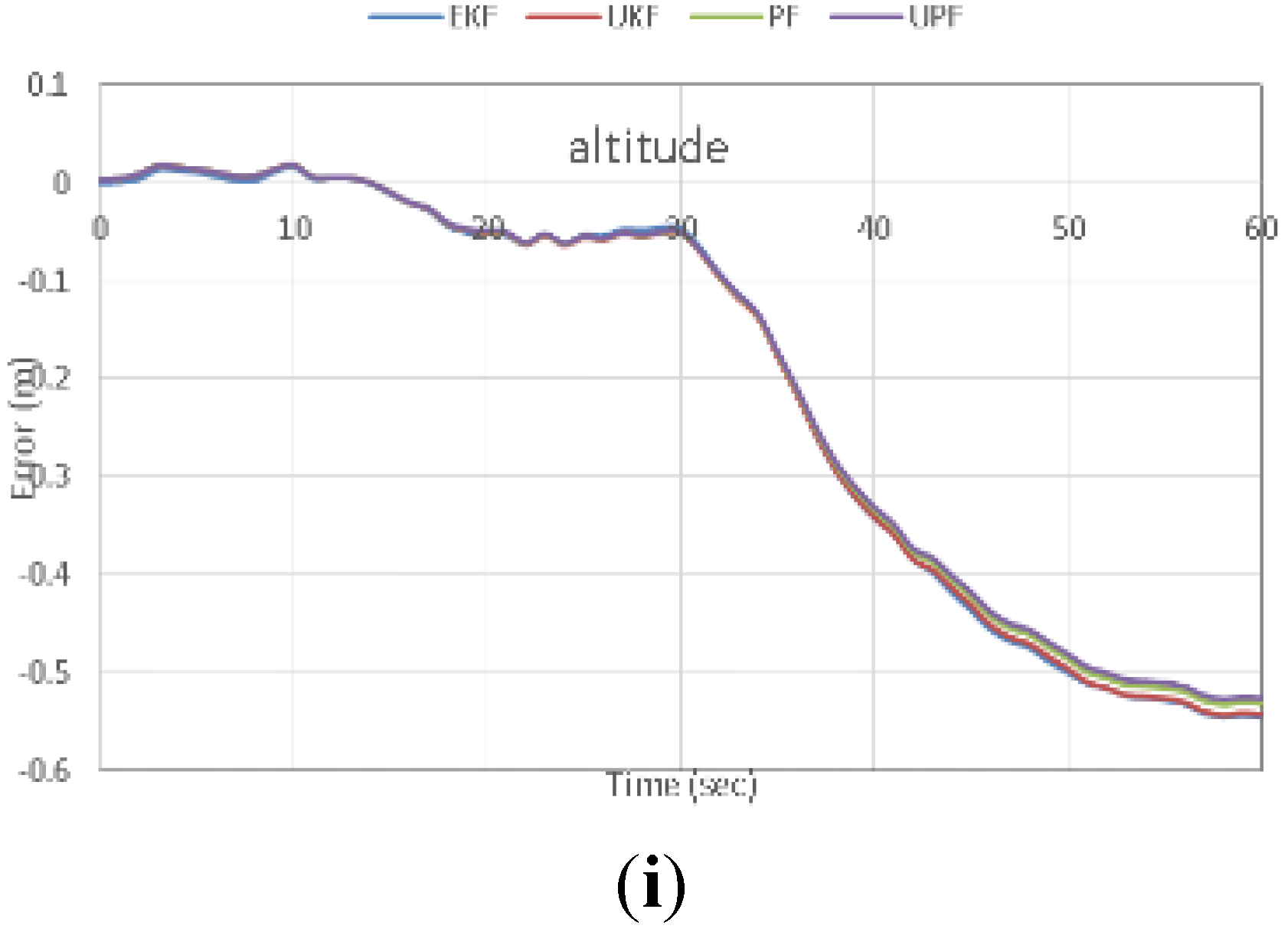
Figure 10 shows the positioning errors during GPS outages number 2, 5 and 6, as examples. It can be clearly seen that meter-level positioning accuracy can be obtained through all estimation filters.
Figure 10.
Positioning accuracy during GPS outages for latitude, longitude, and altitude. Outage 2 (a–c); outage 5 (d–f) and outage 6 (g–i).
Figure 10.
Positioning accuracy during GPS outages for latitude, longitude, and altitude. Outage 2 (a–c); outage 5 (d–f) and outage 6 (g–i).
It can be also seen that UPF slightly enhances the positioning accuracy during the GPS outages, in comparison with the traditional estimation filters. In addition, the nonlinear estimation filters failed to present significant improvement in the positioning accuracy compared with the traditional EKF. This is essentially attributed to the use of linear stochastic models, i.e., first order Gaussian Markov process, for all filters to present a unified comparison between the linear and non-linear estimation filters. In addition, we used fiber optic gyros, as opposed to MEMS-based gyros, which exhibit significantly better behavior.
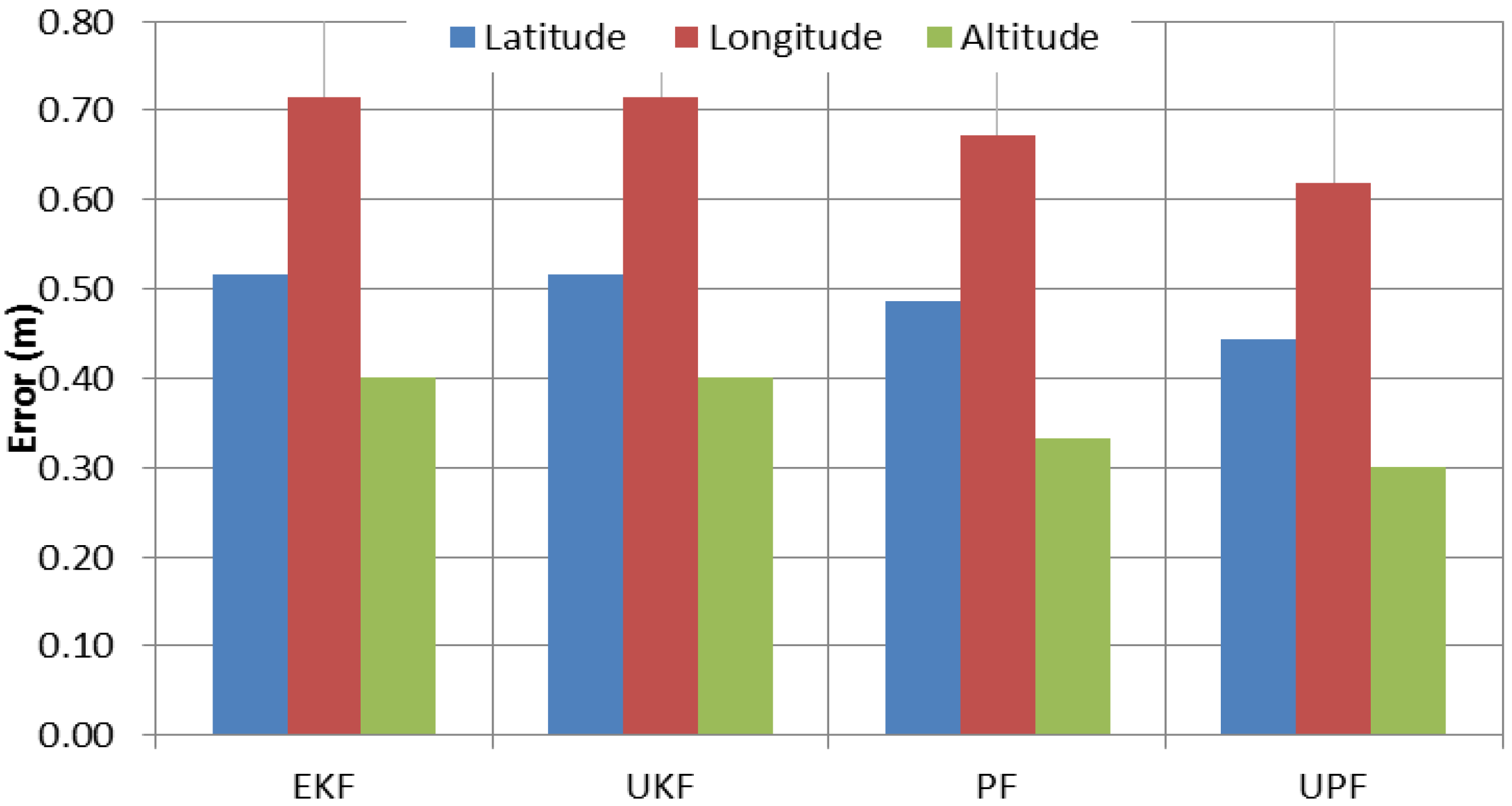
Figure 11 shows the average of the maximum positioning errors, referenced to the carrier-phase-based DGPS solution, during the 60-second GPS outages. It can be observed that, in comparison with EKF, UPF enhances the positioning accuracy during the GPS outages by 14%, 13% and 15% in latitude, longitude and altitude, respectively. However, compared with PF, the solution improvements are only 6%, 5% and 7% in latitude, longitude and altitude, respectively. It can also be seen that both UKF and EKF present comparable positioning results in all three components.
Figure 11.
Average of maximum error for different estimation filters during GPS outages.
Figure 11.
Average of maximum error for different estimation filters during GPS outages.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}