
An Efficient Data-Gathering Routing Protocol for Underwater Wireless Sensor Networks

 ,
,  , , ,
, , ,
Abstract
:1. Introduction
- (i)
- Neither the number of nodes is increased, nor is the AUV added: In this case, the nodes communicate at relatively farther distances. Thus, the performance of the network degrades in terms of network lifetime, throughput, end-to-end delay, etc.
- (ii)
- The number of nodes is increased, but the AUV is not added: Initially, throughput and network lifetime would increase; however, later on, both will decrease due to interference. The end-to-end delay, in this case, would increase.
- (iii)
- The AUV is added, but the number of nodes is not increased: The network lifetime and throughput would increase, and the end-to-end delay would decrease.
- (iv)
- The number of nodes is increased, and the AUV is added: This case would show hybrid results of Case (ii) and Case (iii).
2. Related Work and Motivation
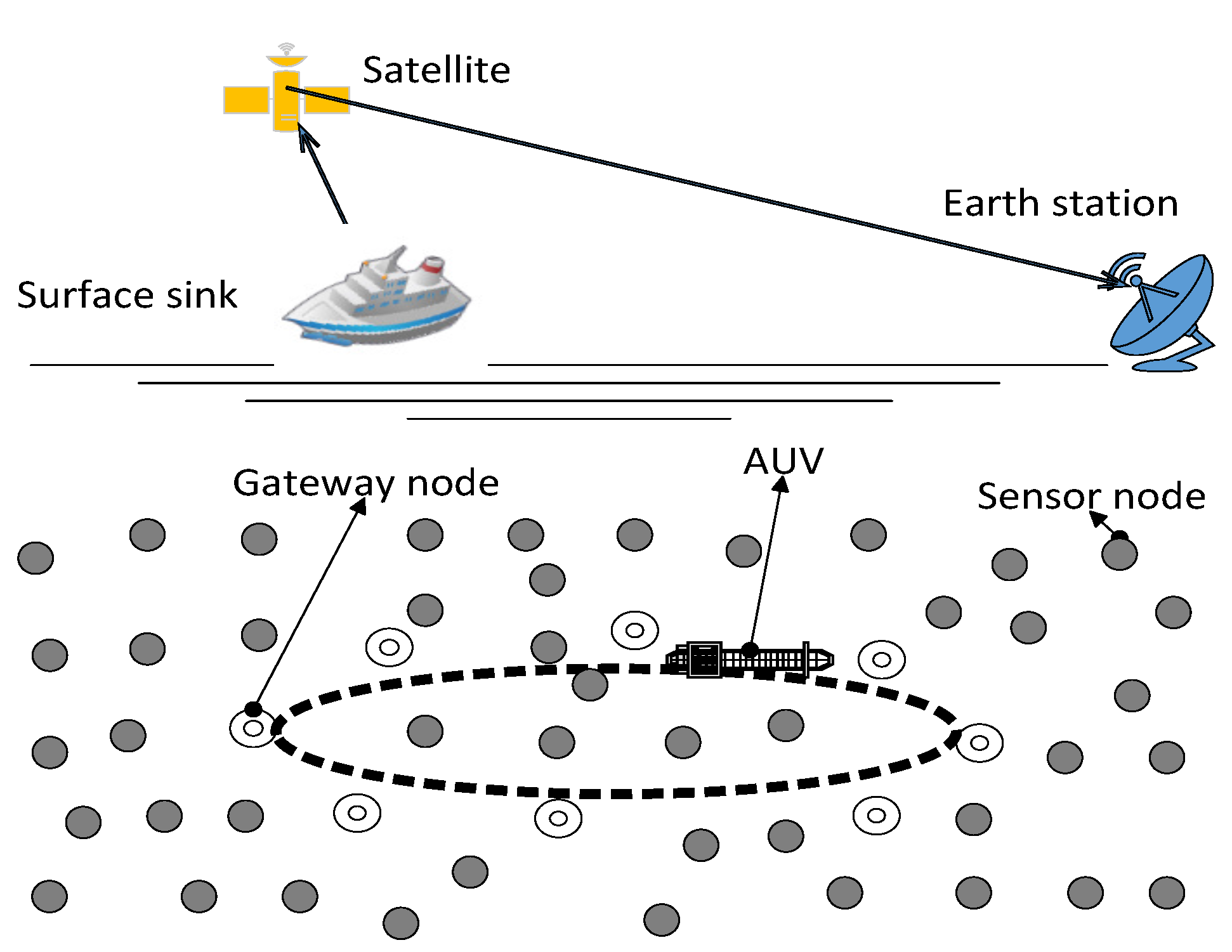
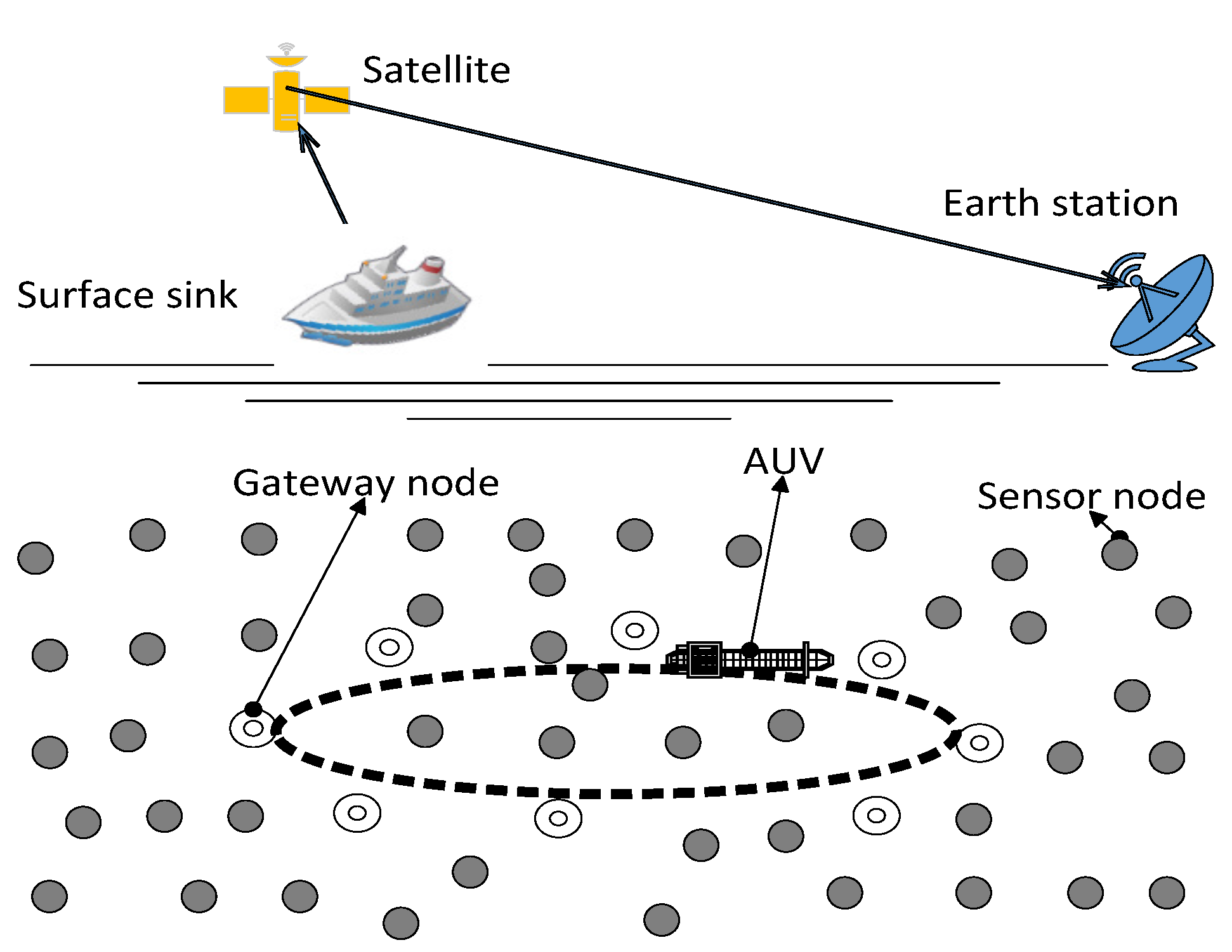
3. System Model
- Central power rests with the sink.
- Nodes always have data to send.
- All nodes are position aware.
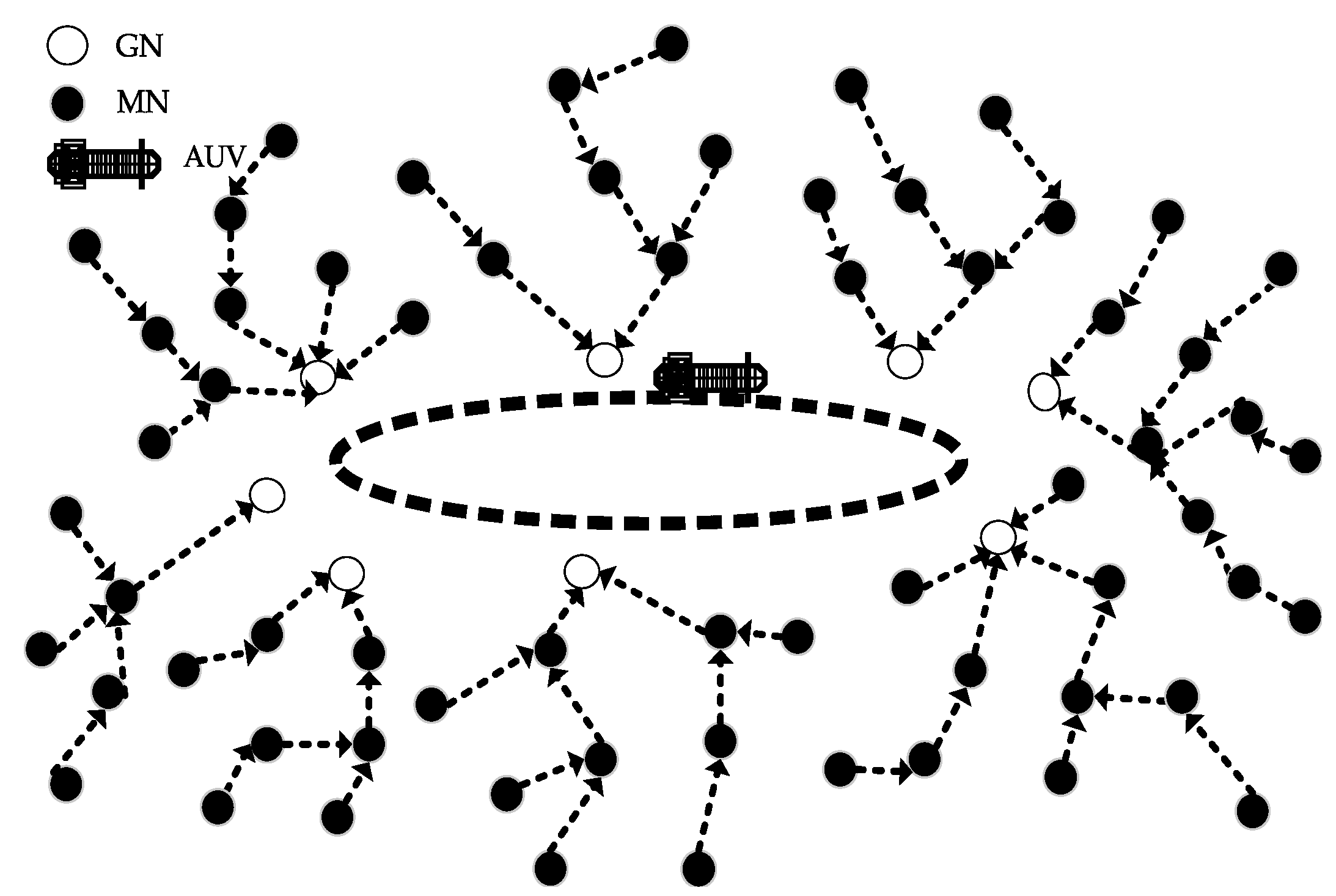
- The network nodes are hierarchical, i.e., nodes are of four types; MNs, GNs, AUV and sink. The MNs and GNs are randomly deployed in the network field; the AUV moves on its defined trajectory; and the sink resides at the water surface.
- MNs gather the information of interest from their surroundings and send the gathered data to their respective GNs within their allocated time slots. The AUV moves on its defined path and gathers data from in-range GNs. Finally, the AUV transmits gathered data to the sink.
- Nodes, while sending data to other nodes, update them with their residual information via a field in the packet header.
- In order to match the changing GNs with the fixed route of AUV, the GNs are selected within the communication range of AUV, and a synchronization mechanism is defined between these, which will be discussed in the network model.
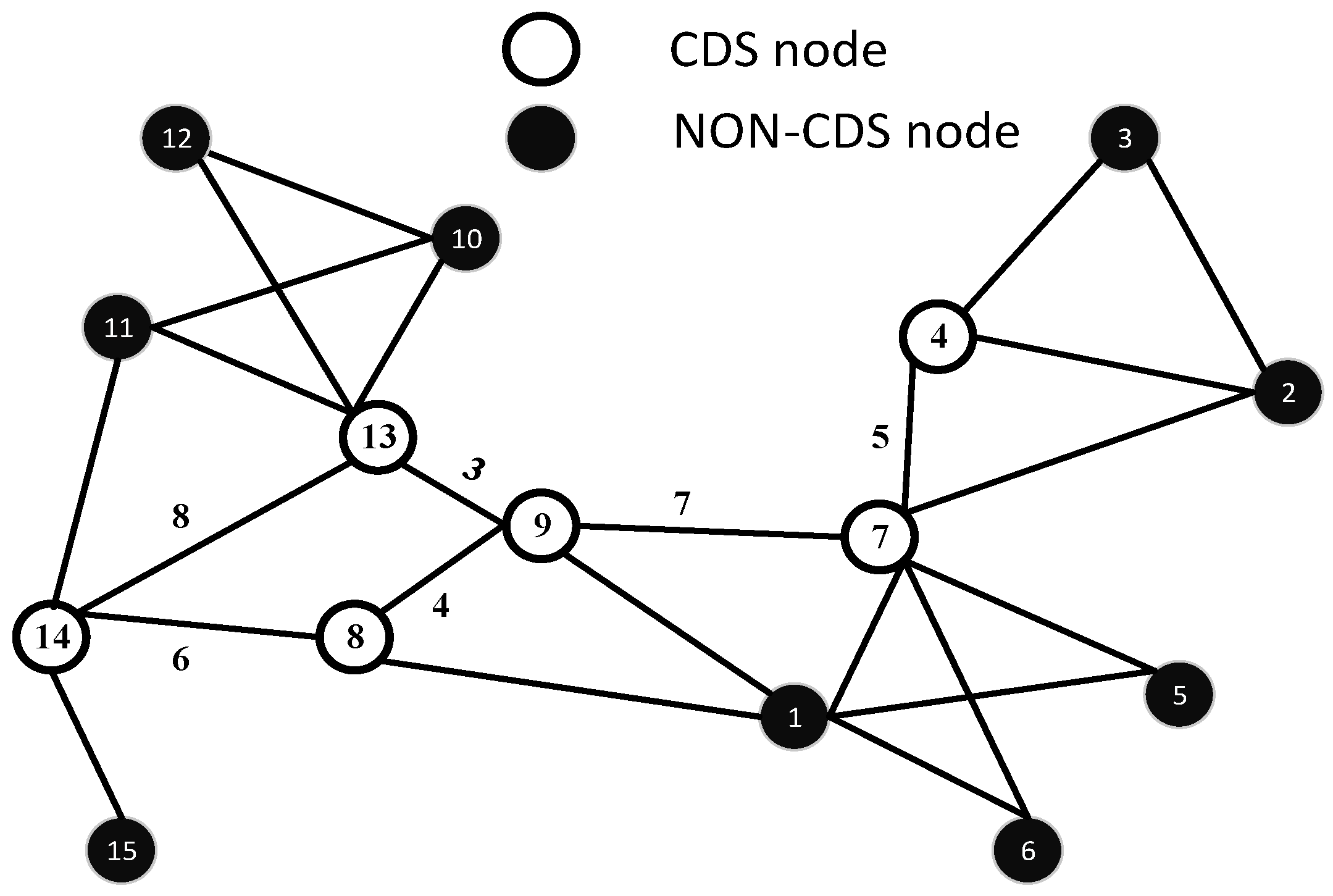
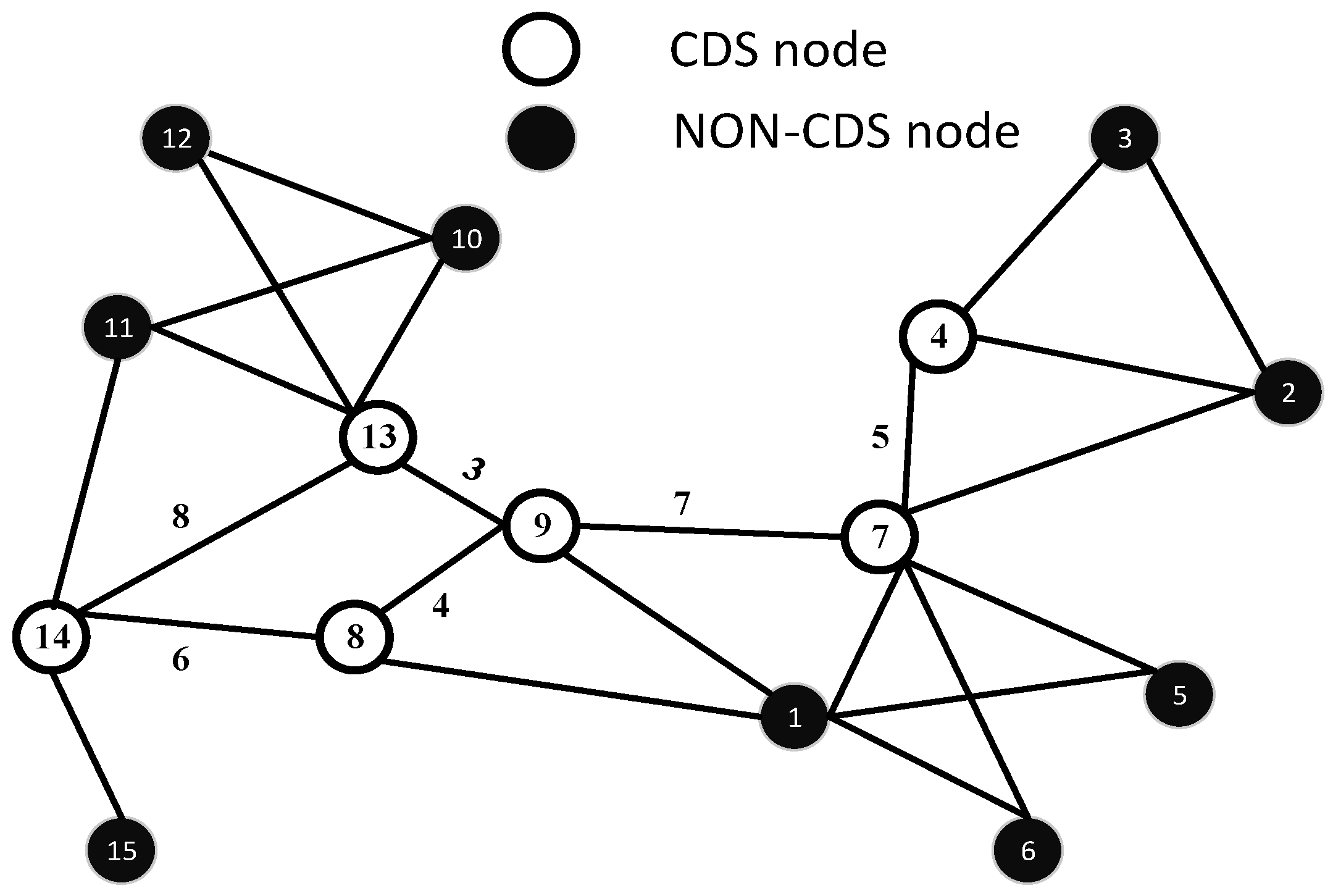
3.1. Network Model: Basic Definitions
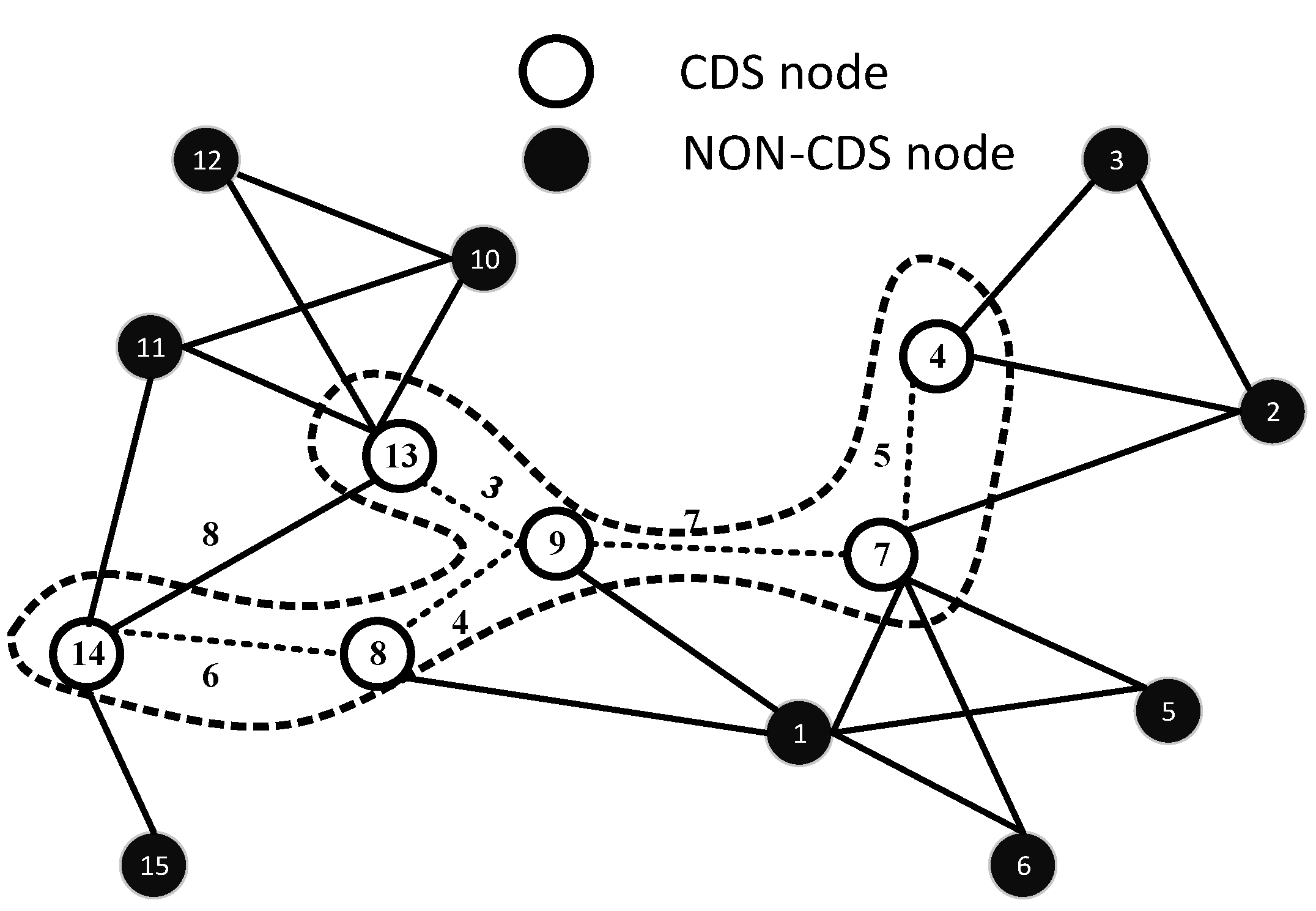
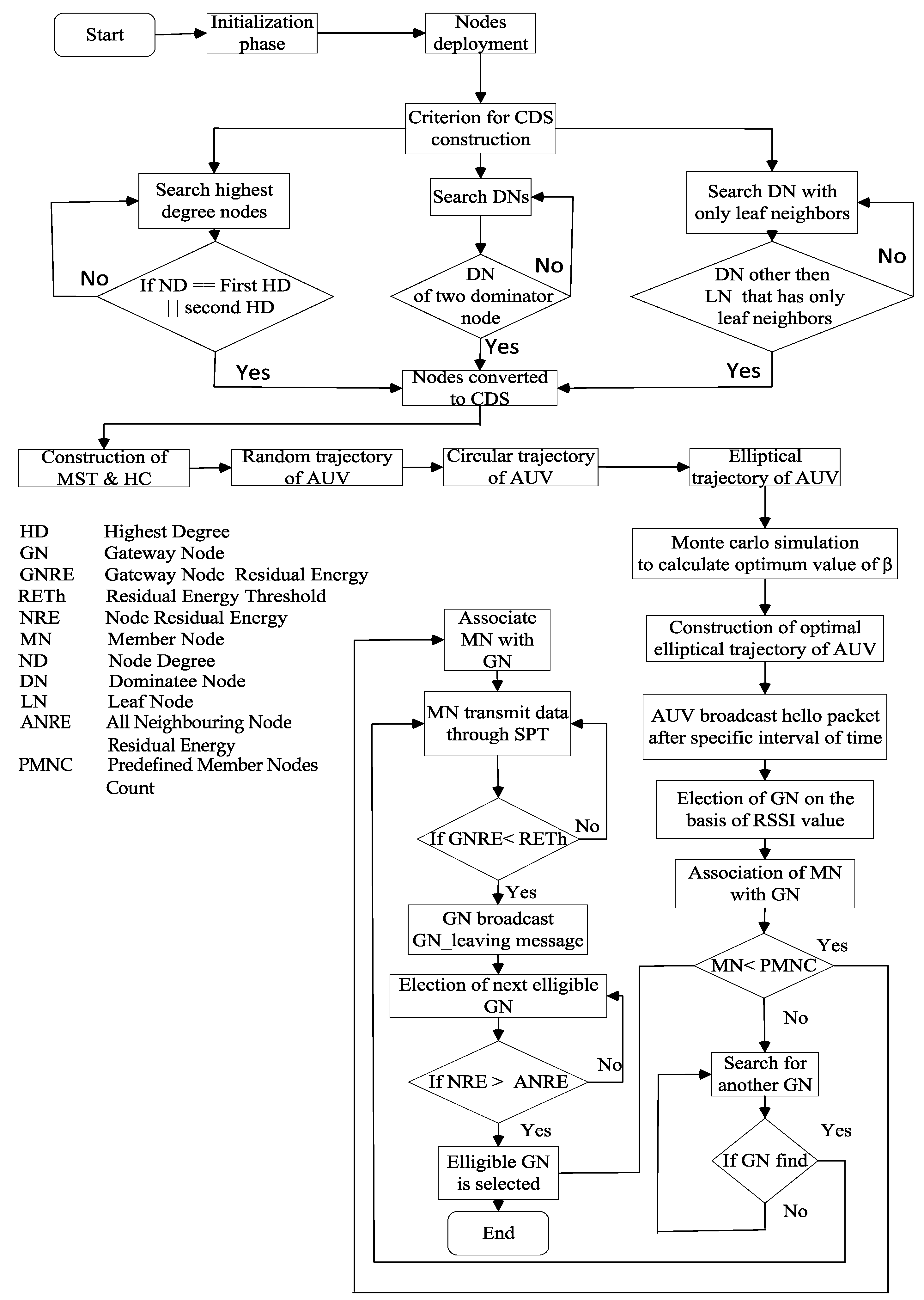
- First of all, check the degree of nodes. After that, consider those nodes that have the highest degree and then the second highest degree. The highest degree nodes are called dominator nodes. The nodes that are adjacent to the highest degree nodes are called dominatee nodes.
- Dominatee nodes that are not further adjacent to any other node are called leaf nodes.
- Dominatee nodes other than the leaf nodes are converted to dominators if that dominatee node has only leaf neighbours.
- The node that is the dominatee of two dominator nodes is also converted to a dominator node.
- The dominator nodes make the CDS in which every node is able to access any other CDS node by a path that exist entirely within the CDS, and every non-CDS node is adjacent to at least one CDS node.
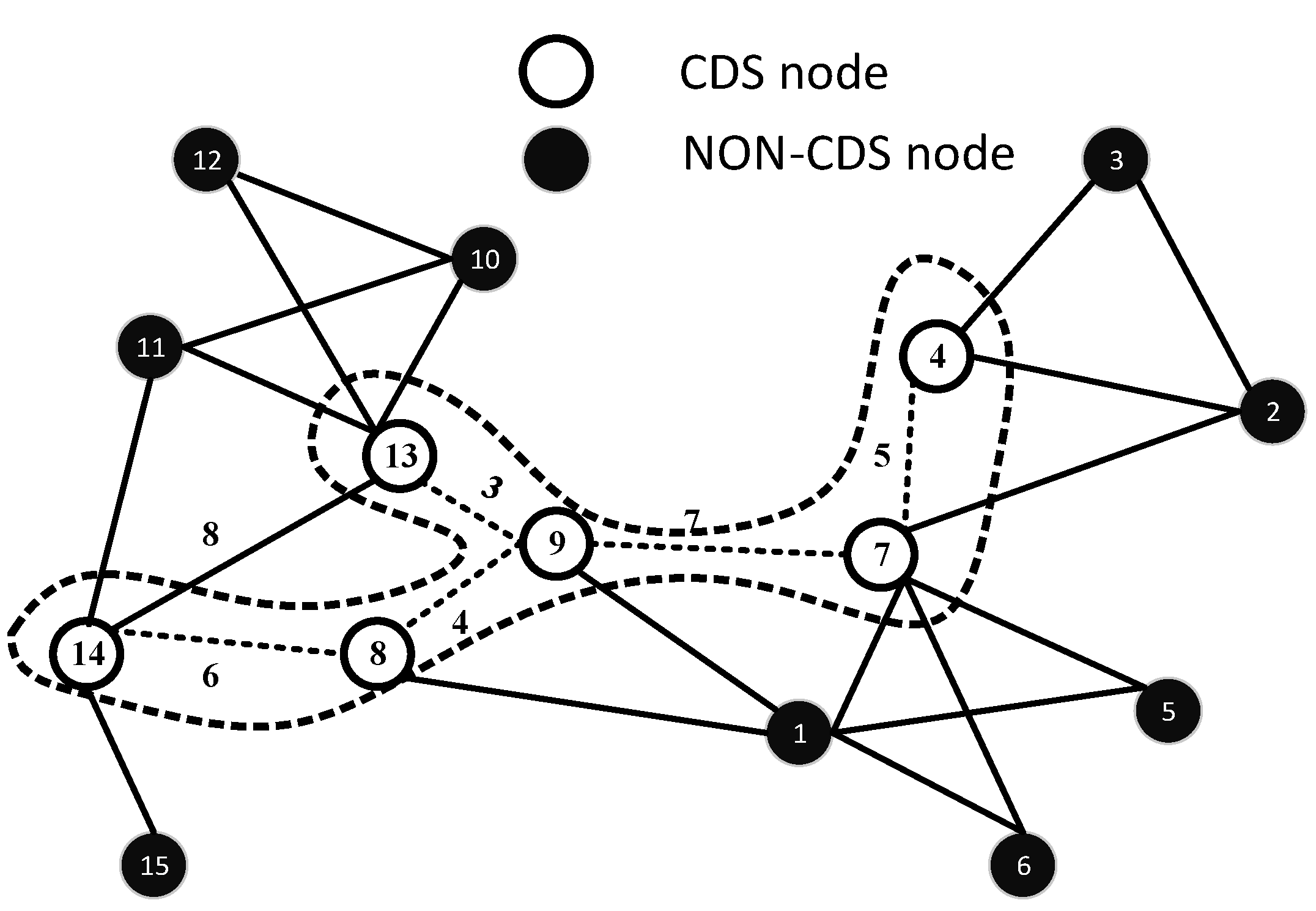
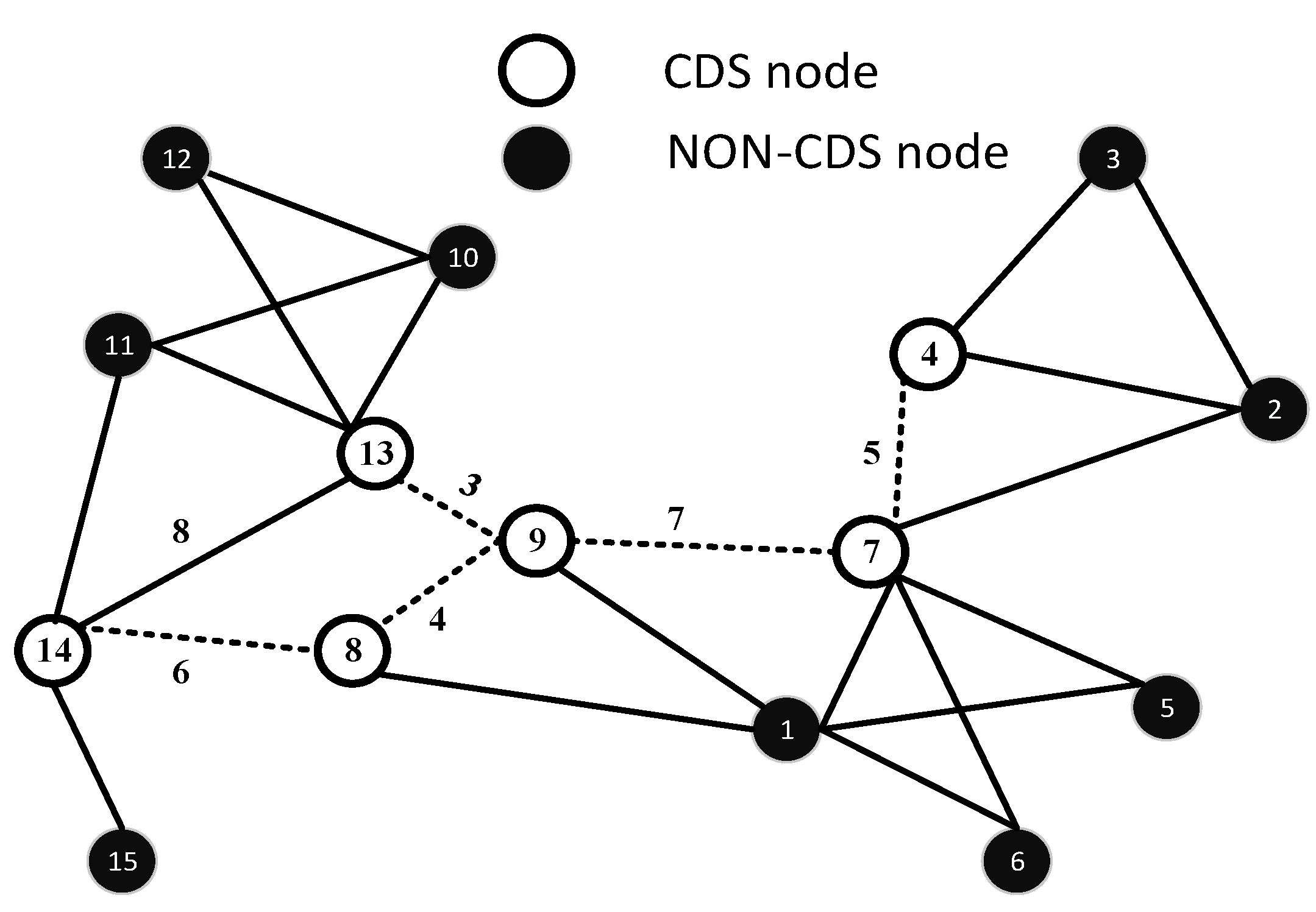
3.2. Trajectories of AUV Mobility
- Forward traversed list (FTL)
- Reverse traversed list (RTL)
- Trajectory list (TL)

3.2.1. Formation of the HC: An Example of AUV Trajectory Formation
3.2.2. Circular Trajectory
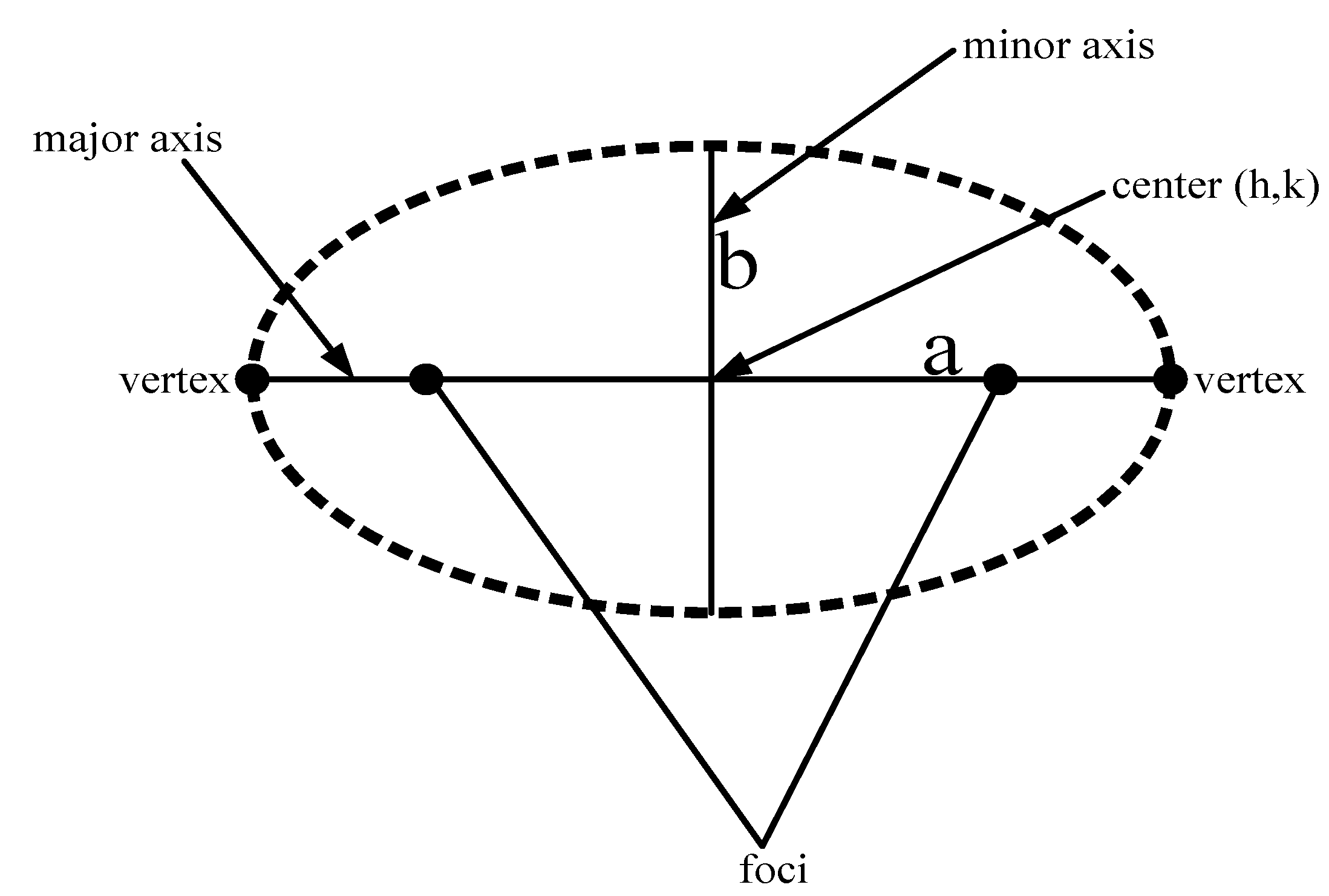
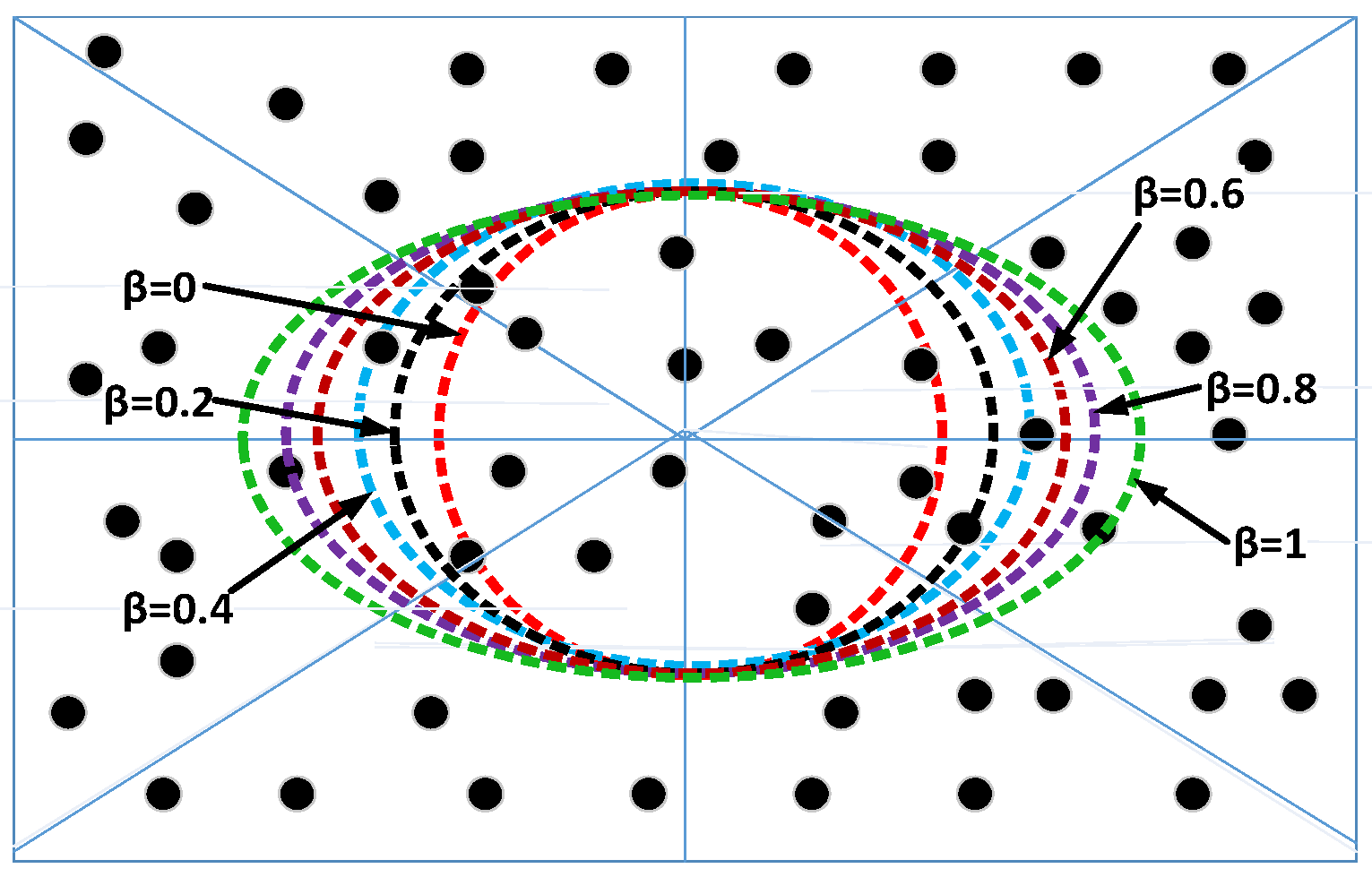
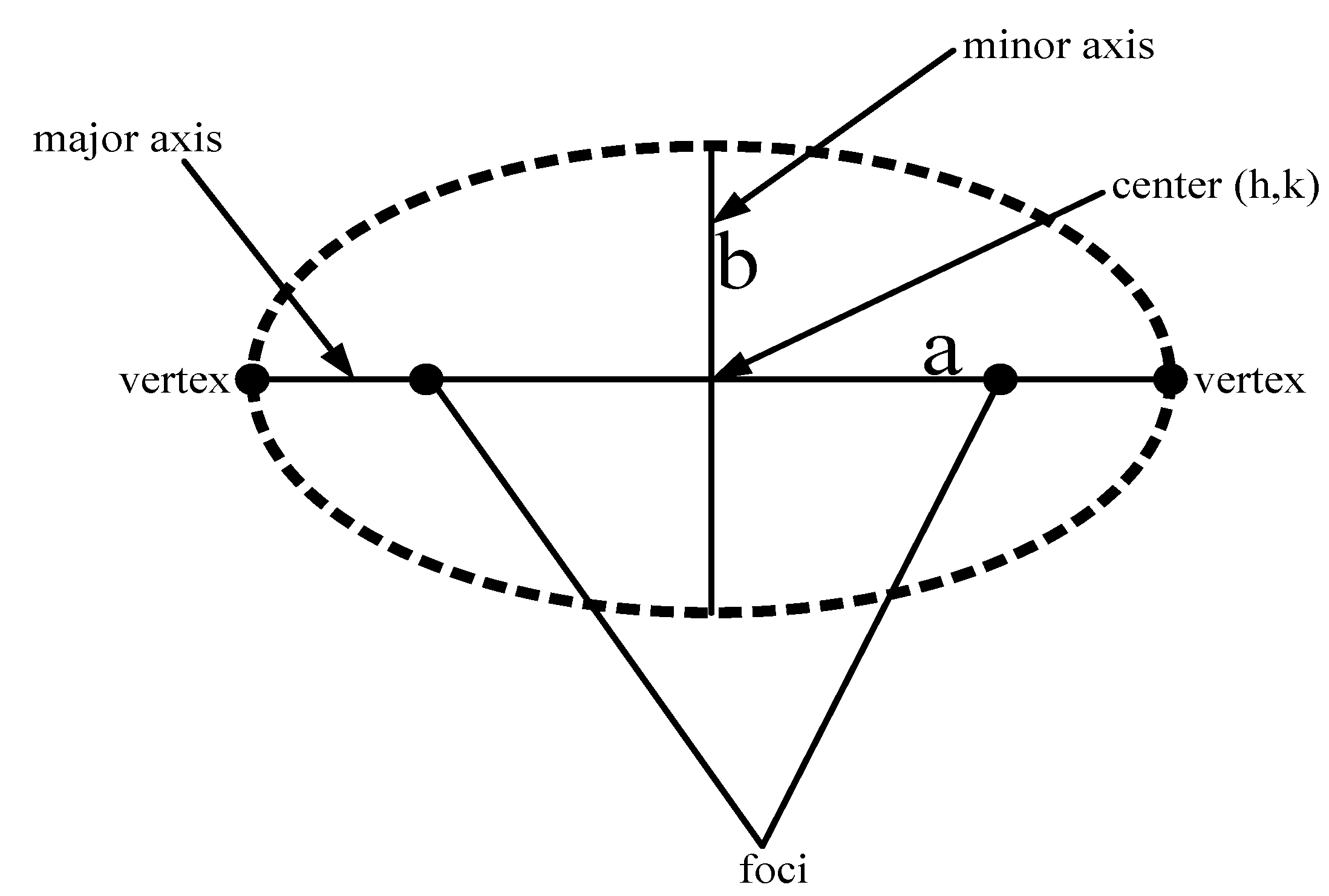
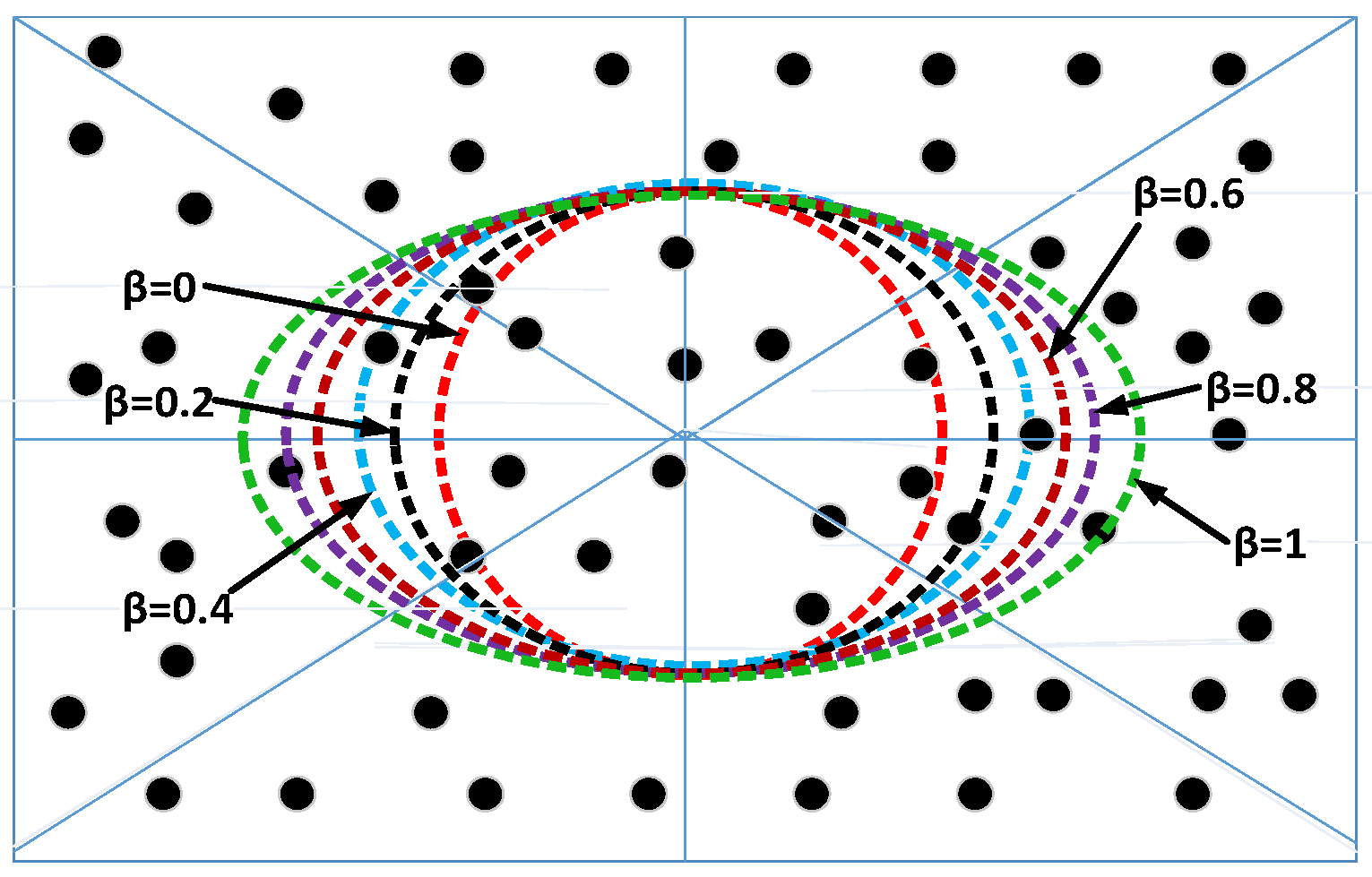
3.2.3. Elliptical Trajectory


4. Sub-Optimal Data Gathering
- CDS hops (h)
- Non-CDS hops (h)
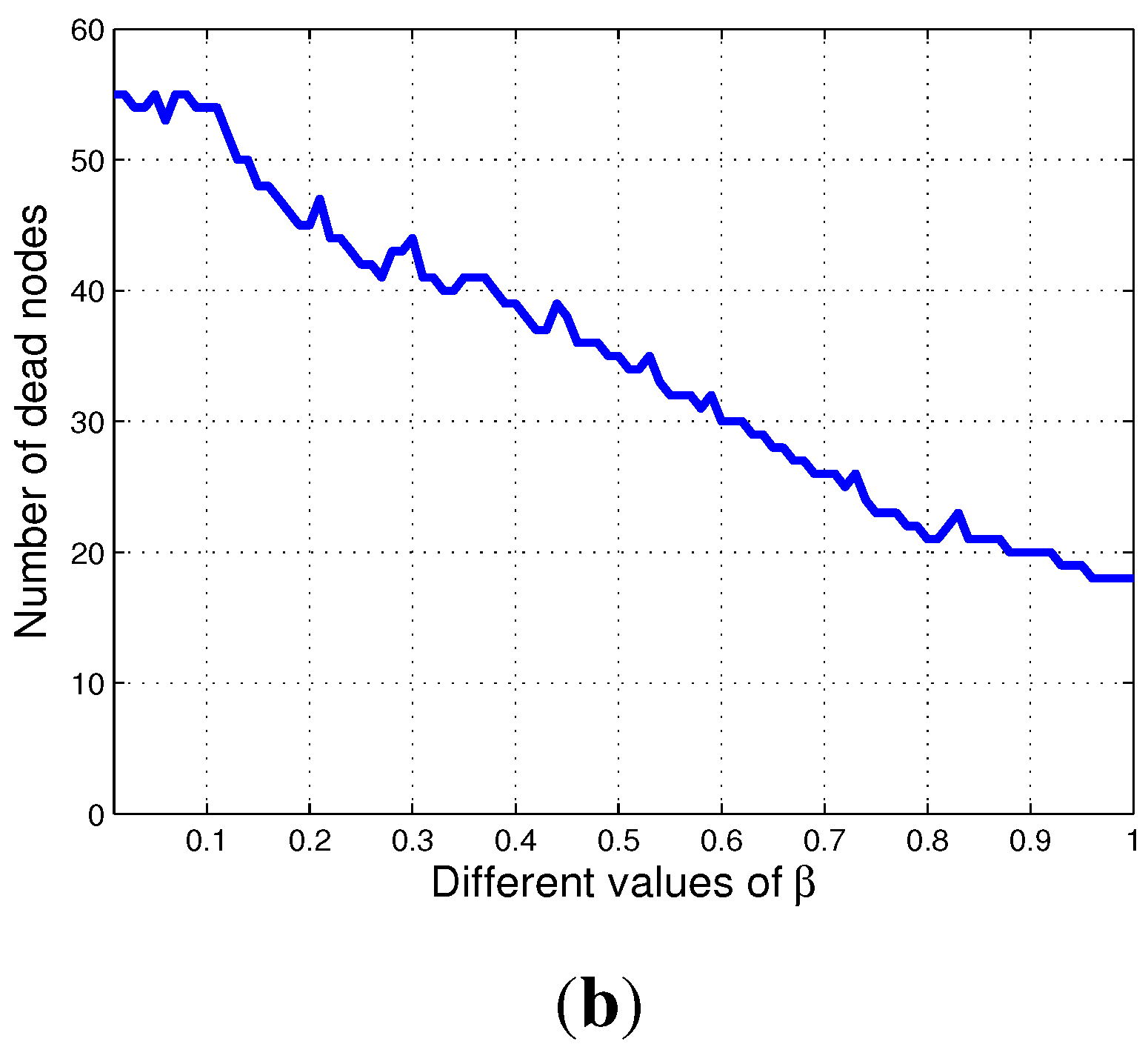
4.1. Calculation of the Sub-Optimized Value of β

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| β | b | a = b + bβ |
|---|---|---|
| 0 | 50 m | 50 m |
| 0.2 | 50 m | 60 m |
| 0.4 | 50 m | 70 m |
| 0.6 | 50 m | 80 m |
| 0.8 | 50 m | 90 m |
| 1 | 50 m | 100 m |
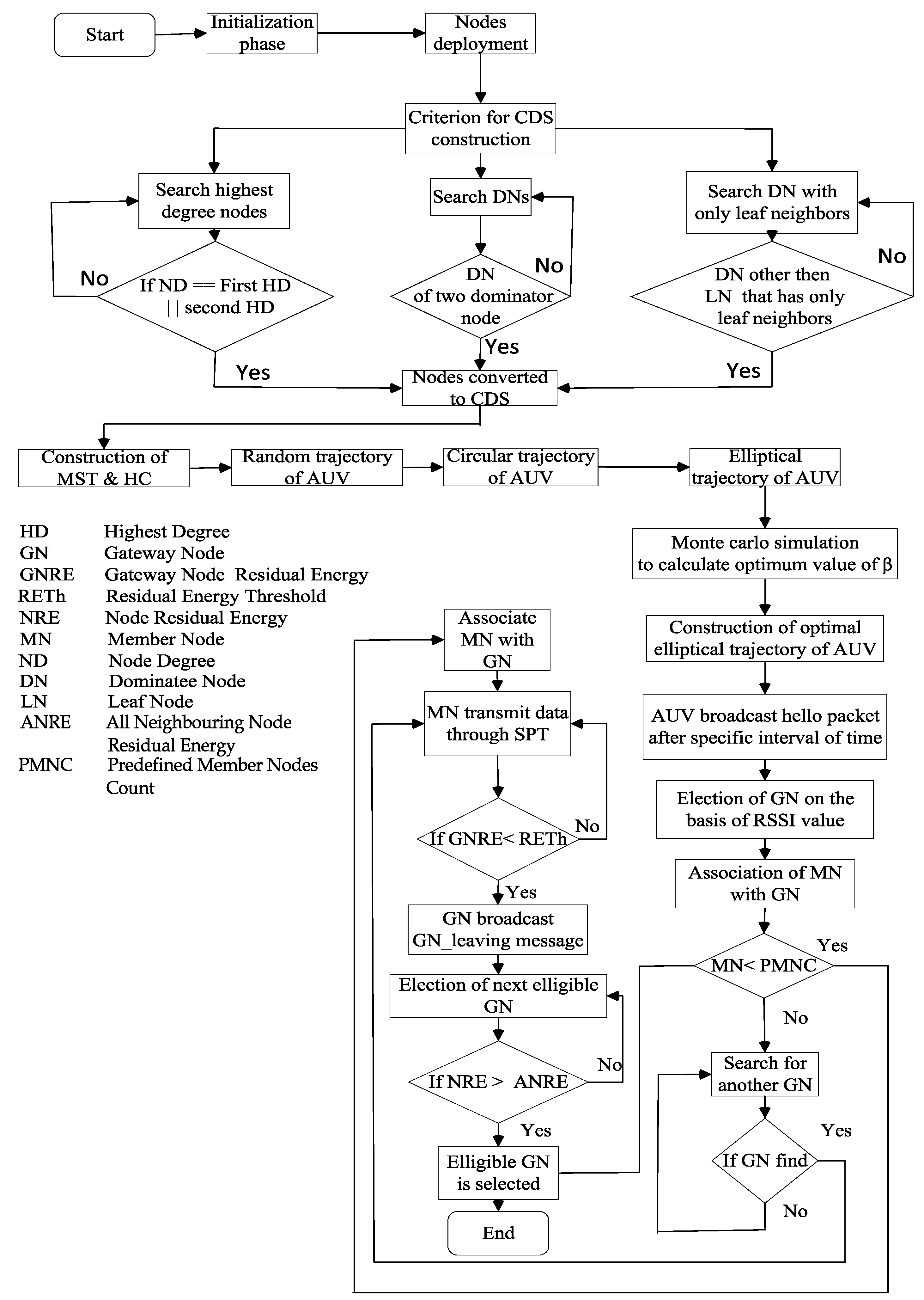
5. AEDG: The Proposed Scheme
- The AUV has unlimited power, memory and computational capability.
- The trajectory of the AUV is predefined (elliptical).
- The nodes are randomly deployed in the underwater environment.
5.1. Initialization Phase
5.1.1. GN Selection Criterion

5.1.2. Member Nodes’ Association
5.2. Data Collection Phase
6. Simulation Results
| Parameters | Values |
|---|---|
| Network size | From 100 m × 100 m to 10 km × 10 km |
| Number of nodes | 10 and 100 |
| Initial energy of normal nodes | 100 J |
| Data aggregation factor | 0.6 |
| Packet size | 70 bytes |
| Transmission range of the sensor node | 20 meters |
| Number of AUVs | 1 |
6.1. Network Performance Parameters: Definitions
6.1.1. Stability Period
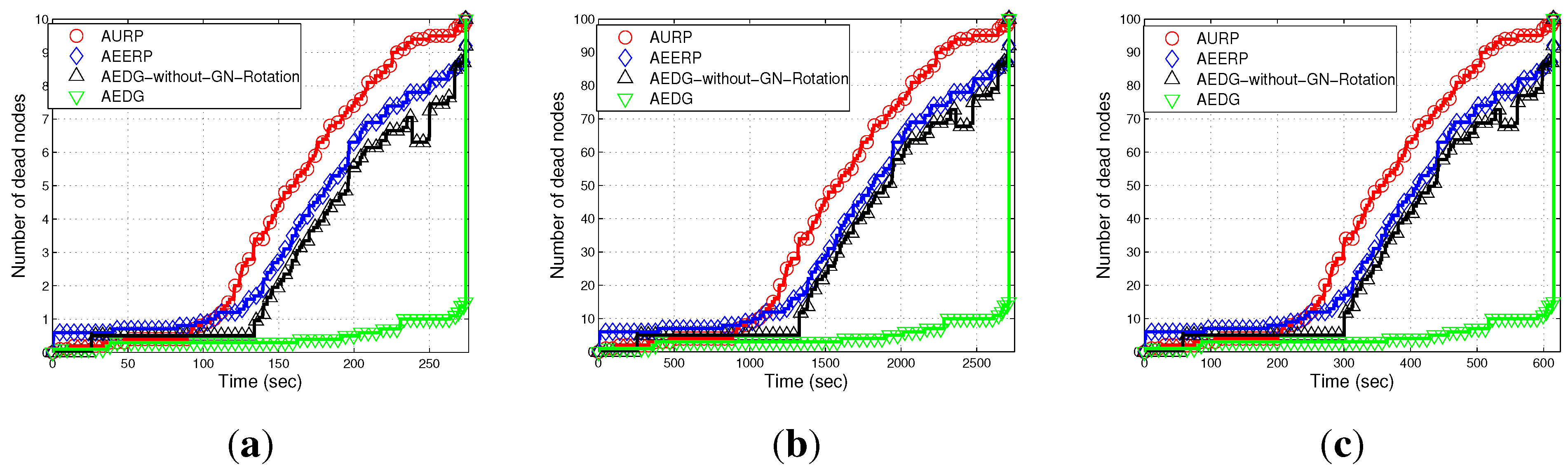
6.1.2. Network Lifetime
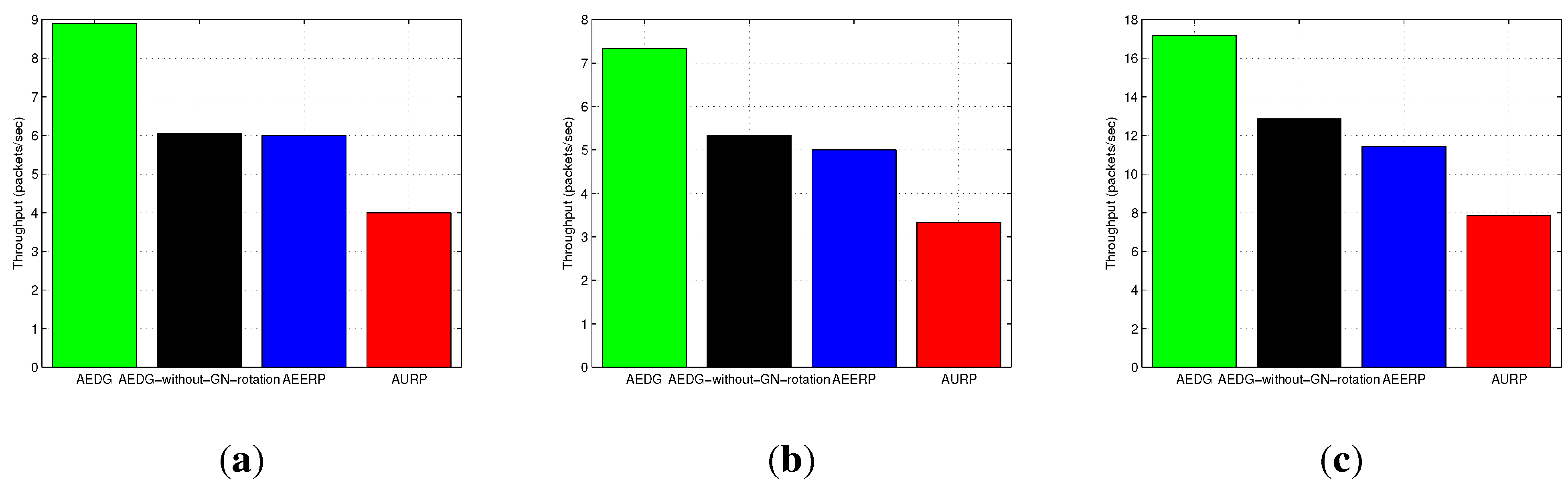
6.1.3. Throughput
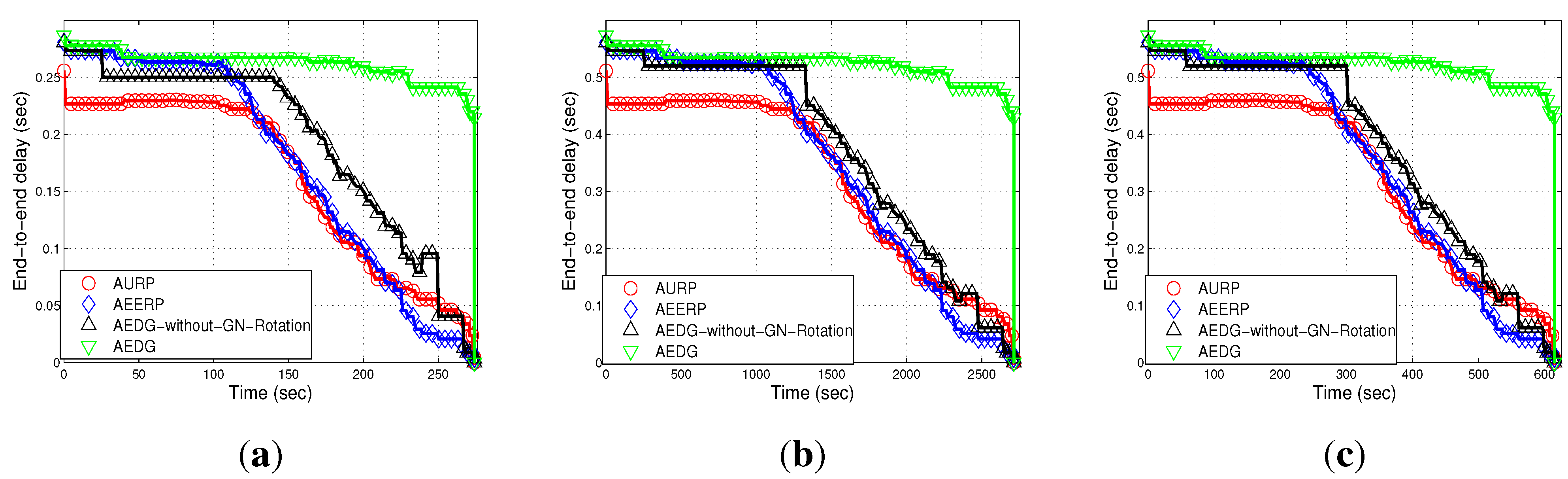
6.1.4. End-to-End Delay
6.1.5. Transmission Loss
6.2. Network Performance Parameters: Discussions
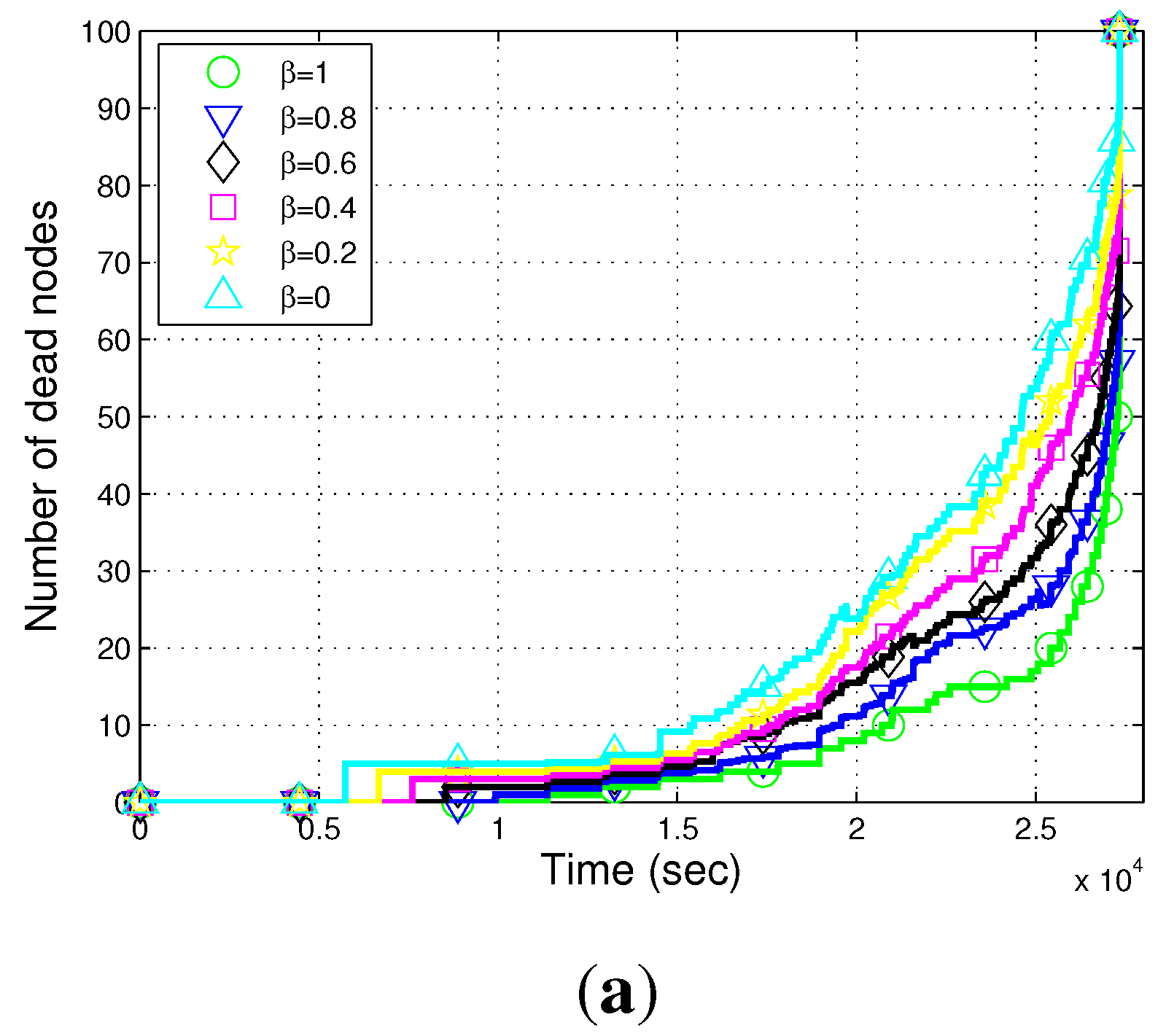
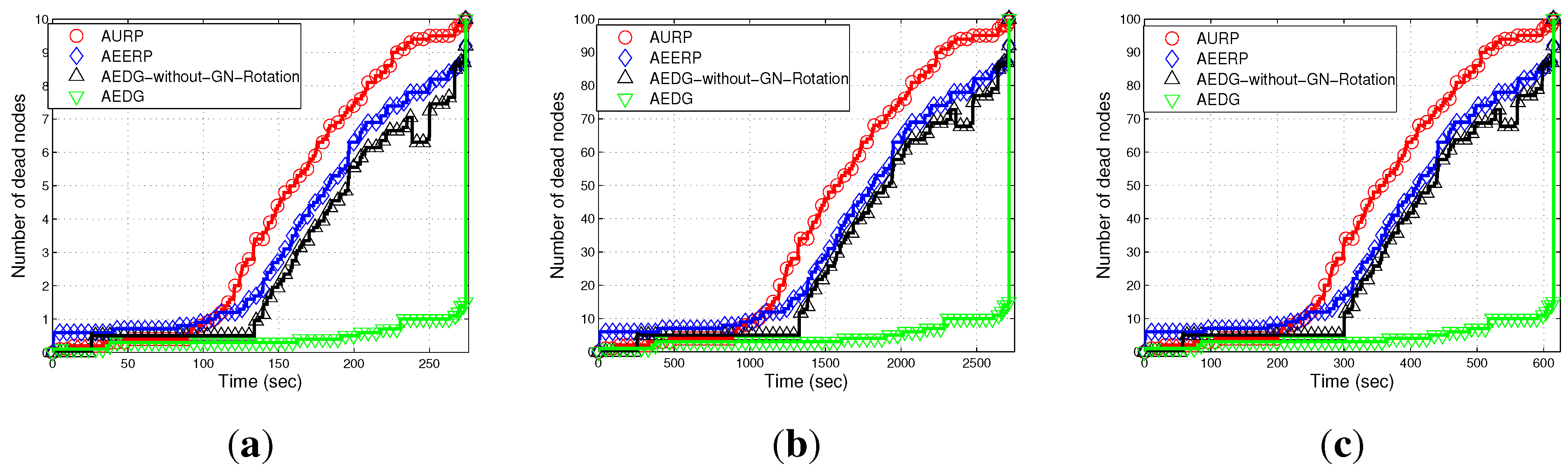
6.2.1. Network Lifetime
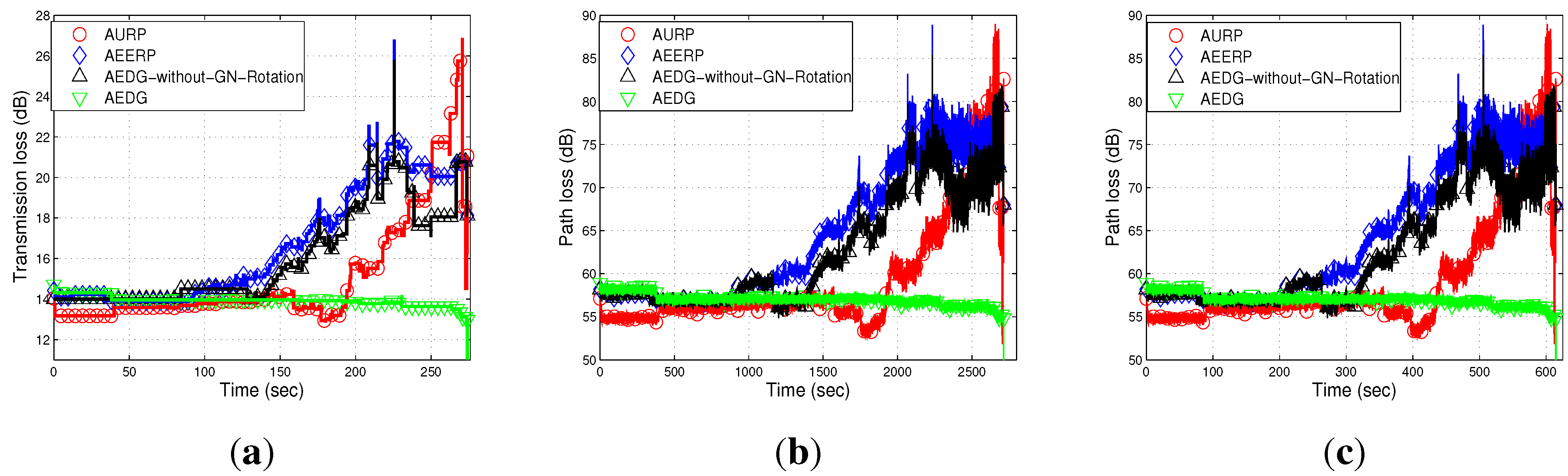
6.2.2. Path Loss

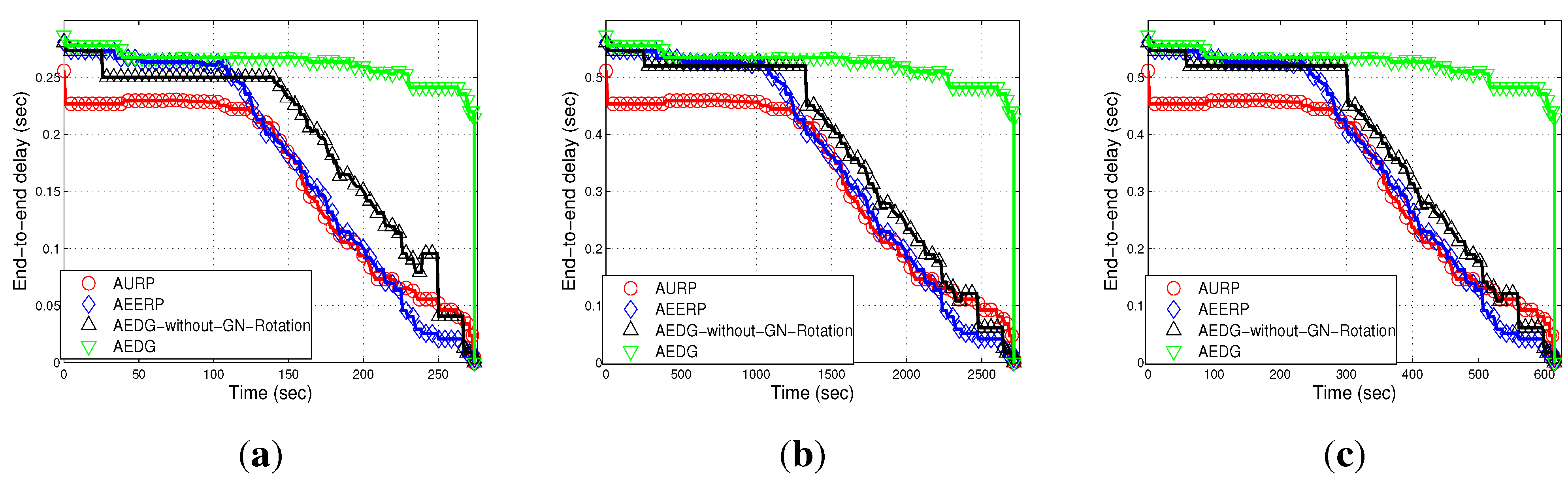
6.2.3. End-to-End Delay
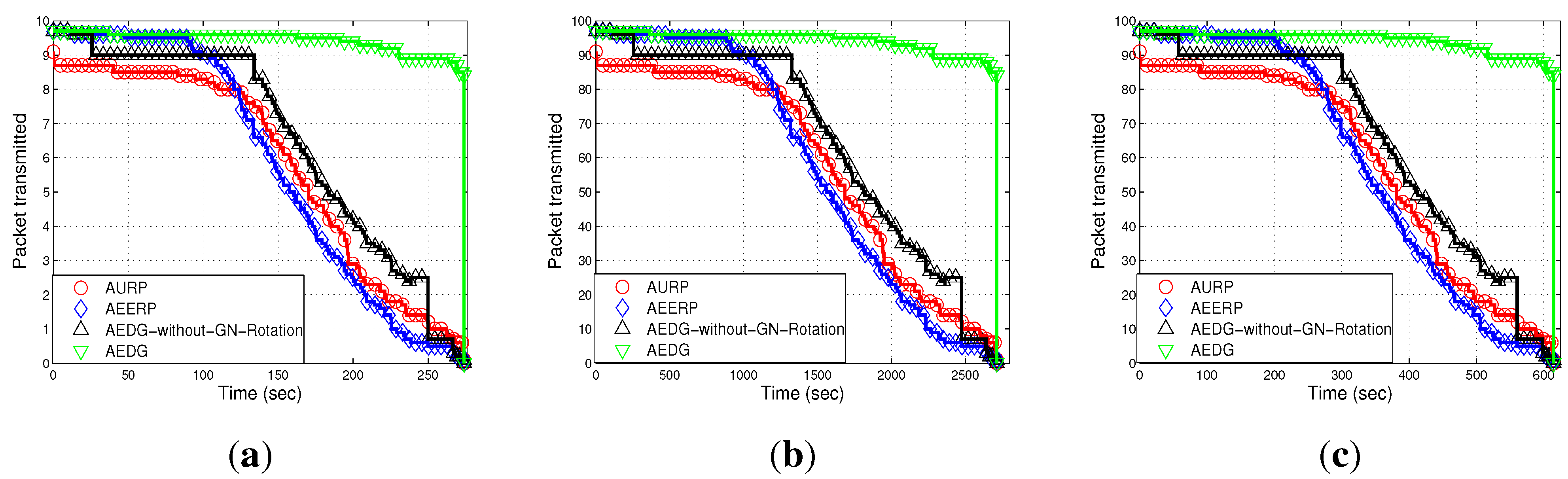
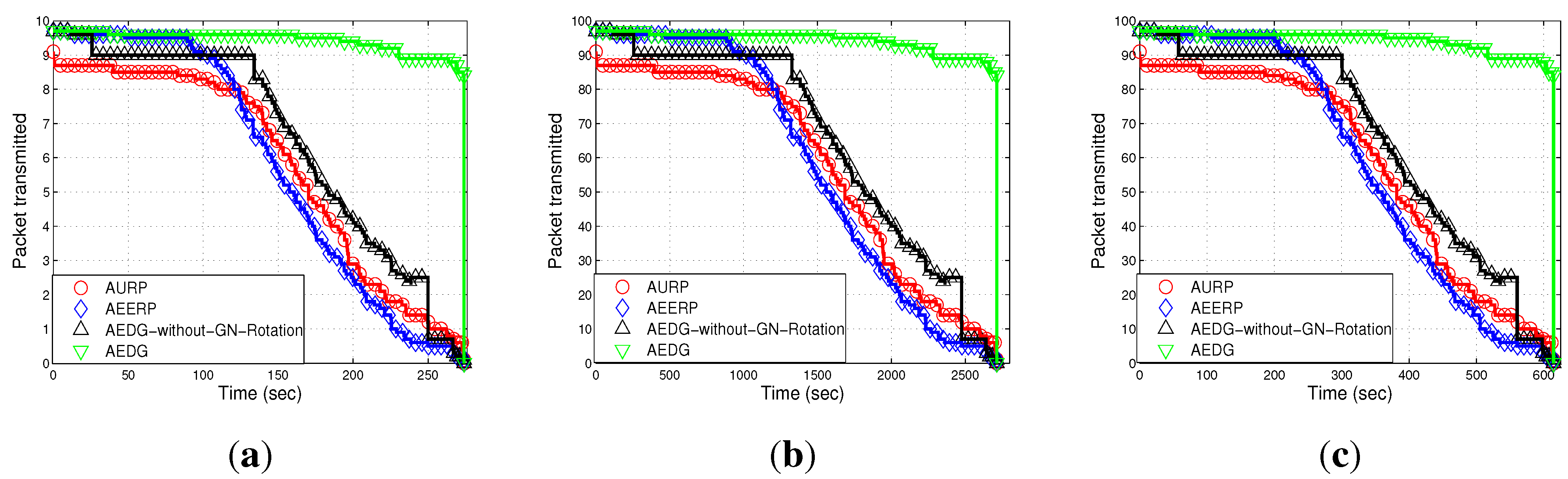
6.2.4. Network Throughput
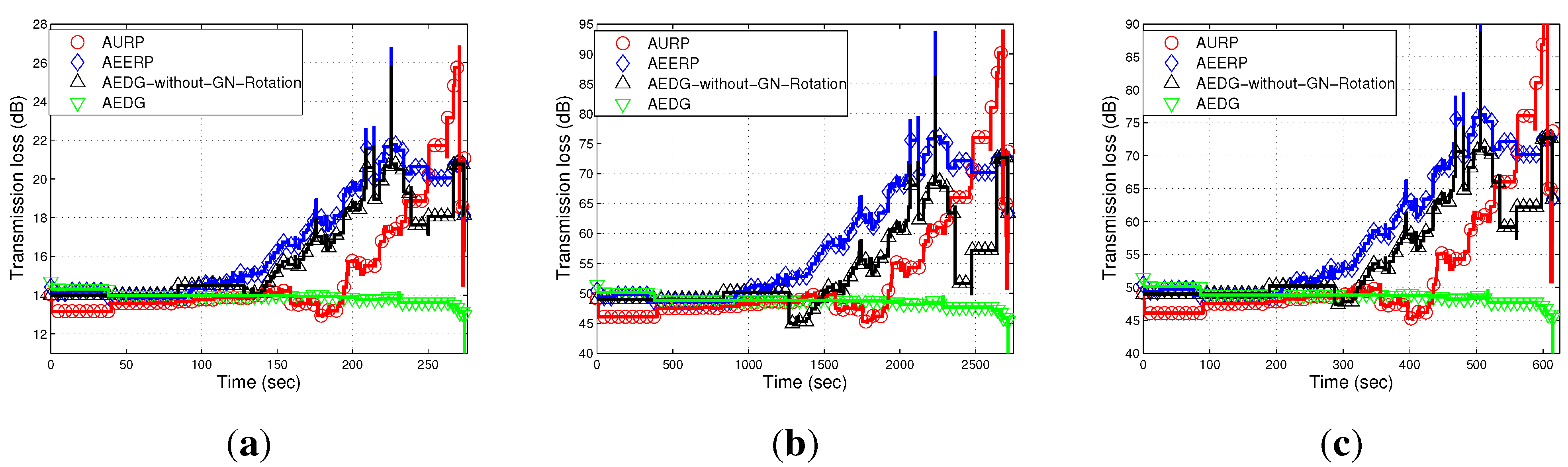
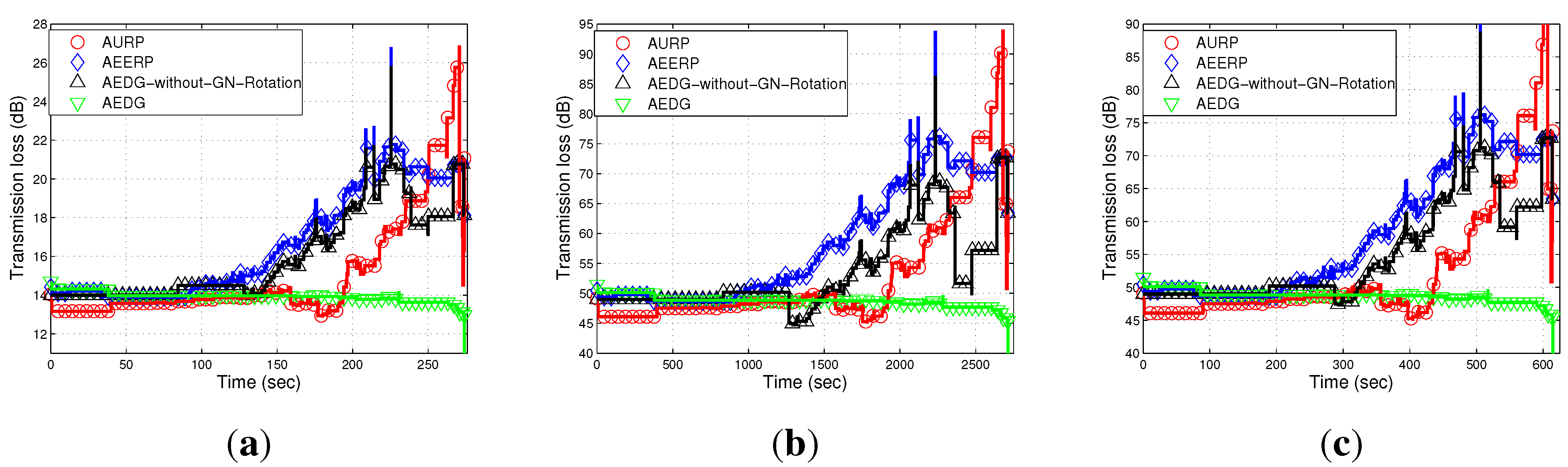
6.2.5. Transmission Loss
6.3. Performance Trade-Offs
| Protocols | Mechanism | Advantages Achieved | Price Paid/at the Cost of |
|---|---|---|---|
| AURP | No mechanism to balanced energy consumption (Figure 10). | Less end-to-end delay (Figure 12). | Low stability period, high energy consumption and high transmission loss (Figure 10). |
| AEERP | Mechanism to balance energy consumption (Figure 10) and no mechanism to limit the association of MNs with the GN. | Less end-to-end delay (Figure 12) and enhanced throughput as compared to AURP (Figure 13). | High energy consumption and low stability period as compared to AEDG (Figure 10). |
| AEDG | Sub-optimized elliptical path of the AUV and sub-optimal assignment of member nodes with the GN. | High stability period, low energy consumption (Figure 10), high network throughput (Figure 13) and low transmission loss (Figure 15). | High end-to-end delay (Figure 12). |
7. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix
A. Area of the Circular Trajectory of the AUV
B. Area of the Elliptical Trajectory of the AUV
C. Calculation of the Sub-Optimal Value of e, a and b
D. CDS-Hops: Detailed Derivation Steps
E. List of Abbreviations
| UWSN | underwater wireless sensor network |
| MS | mobile sink |
| AUV | autonomous underwater vehicle |
| AEDG | AUV-aided efficient data gathering |
| SPT | shortest path tree |
| CDS | connected dominating set |
| GN | gateway node |
| MN | member node |
| RSSI | received signal strength indicator |
| AURS | autonomous underwater robotic system |
| RBCDRR | round-based clustering scheme for data redundancy resolving |
| ACOA | ant colony optimization algorithm |
| AFSA | artificial fish swarm algorithm |
| AURP | AUV-aided underwater routing protocol |
| AEERP | AUV-aided energy-efficient routing protocol |
| MST | minimum spanning tree |
| DS | dominating set |
| HC | Hamiltonian circuit |
| FTL | forward traversed list |
| RTL | reverse traversed list |
| TL | trajectory list |
| G | Graph |
| V | Set of vertices |
| E | Set of edges |
| Direct communication area | |
| Multi-hop communication area | |
| Area of ellipse | |
| Area of the first quadrant of the ellipse | |
| n | Number of sensor nodes |
| Acceptable delay | |
| Set of CDS nodes | |
| Set of non-CDS nodes | |
| Set of edges between CDS nodes | |
| Set of edges between non-CDS nodes | |
| A subset of that forms an MST | |
| A subset of that does not form an MST | |
| i and j | Node indices |
| Spanning tree | |
| A sub-graph of that forms an MST | |
| Edge between i and j | |
| a | Major axis of an ellipse |
| b | Minor axis of an ellipse |
| Link between i and j | |
| d | Euclidean distance |
| Total number of GNs | |
| α | Offset factor that is used to compensate the distance margin |
| x-coordinate of node i | |
| y-coordinate of node i | |
| r | Radius of a circle |
| C | Circumference of a circle |
| A | Area of a circle |
| Length of AUV path | |
| CDS hops | |
| Non-CDS hops | |
| N | Total number (of CDS or non-CDS edges) |
| P | Perimeter of the elliptical path traversed by an AUV |
| e | Eccentricity of an ellipse |
| β | A control variable for different trajectories of an AUV |
| Decibels |
References
- Smethie, W., Jr.; Chipman, D.; Swift, J.; Koltermann, K. Chlorofluoromethanes in the Arctic Mediterranean seas: Evidence for formation of bottom water in the Eurasian Basin and deep-water exchange through Fram Strait. Deep Sea Res. Part A Oceanogr. Res. Papers 1988, 35, 347–369. [Google Scholar] [CrossRef]
- Majumdar, S. Application of Scale Free Network on Wireless Sensor Network. Ph.D. Thesis, Jadavpur University, Kolkata, West Bengal, India, 2014. [Google Scholar]
- Heidemann, J.; Ye, W.; Wills, J.; Syed, A.; Li, Y. Research challenges and applications for underwater sensor networking. In Proceedings of the IEEE Wireless Communications and Networking Conference, WCNC 2006, Las Vegas, NV, USA, 3–6 April 2006.
- Chen, H.; Wu, X.; Wang, Y.; Liu, G.; Shu, L.; Zhang, X. A Dynamic Underwater Sensor Network Architecture Based on Physical Clustering and Intra-cluster Autonomy. In Advances in Wireless Sensor Networks; Springer: Berlin, Germany, 2014; pp. 82–92. [Google Scholar]
- He, M.; Liang, W.; Chen, Q.; Zou, Q. Study on Architecture and Topology of Mobile Underwater Wireless Sensor Networks. In Advanced Technologies in Ad Hoc and Sensor Networks; Springer: Berlin, Germany, 2014; pp. 263–273. [Google Scholar]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Babiker, A.; Zakaria, N. Energy Efficient Communication for Underwater Wireless Sensors Networks. Energy Effic. Commun. Netw. 2012, 47. [Google Scholar] [CrossRef]
- Zhou, Z.; Cui, J.H. Energy efficient multi-path communication for time-critical applications in underwater sensor networks. In Proceedings of the 9th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Hong Kong, China, 26–30 May 2008; pp. 221–230.
- Elsafrawey, A.S.; Hassan, E.S.; Dessouky, M. Improving UWSNs security and data reliability using a cluster controlled mobility scheme. In Proceedings of the 2014 9th International Conference on Informatics and Systems (INFOS), Cairo, Egypt, 15–17 December 2014.
- Jalaja, M.; Jacob, L. Adaptive Data Collection in Sparse Underwater Sensor Networks Using Mobile Elements. In Ad-hoc Networks and Wireless; Springer: Berlin, Germany, 2014; pp. 57–65. [Google Scholar]
- Bhattacharya, A.; Kumar, A. A shortest path tree based algorithm for relay placement in a wireless sensor network and its performance analysis. Comput. Netw. 2014, 71, 48–62. [Google Scholar] [CrossRef]
- Akyildiz, I.F. Wireless sensor networks in challenged environments such as underwater and underground. In Proceedings of the 17th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Montreal, QC, Canada, 21–26 September 2014; pp. 1–2.
- Ali, T.; Jung, L.T.; Faye, I. Classification of Routing Algorithms in Volatile Environment of Underwater Wireless Sensor Networks. Int. J. Commun. Netw. Inf. Sec. 2014, 6, 129–147. [Google Scholar]
- Ahmad, A.; Wahid, A.; Kim, D. AEERP: AUV aided energy efficient routing protocol for underwater acoustic sensor network. In Proceedings of the 8th ACM Workshop on Performance Monitoring and Measurement of Heterogeneous Wireless and Wired Networks, Barcelona, Spain, 3–8 November 2013; pp. 53–60.
- Poncela, J.; Aguayo, M.; Otero, P. Wireless underwater communications. Wirel. Pers. Commun. 2012, 64, 547–560. [Google Scholar] [CrossRef]
- Hosseini, M.; Chizari, H.; Poston, T.; Salleh, M.B.; Abdullah, A.H. Efficient Underwater RSS Value to Distance Inversion Using the Lambert Function. Math. Probl. Eng. 2014. [Google Scholar] [CrossRef]
- Tran, K.T.M.; Oh, S.H. UWSNs: A Round-Based Clustering Scheme for Data Redundancy Resolve. Int. J. Distrib. Sens. Netw. 2014. [Google Scholar] [CrossRef]
- Wu, H.; Chen, X.; Shi, C.; Xiao, Y.; Xu, M. An ACOA-AFSA fusion routing algorithm for underwater wireless sensor network. Int. J. Distrib. Sens. Netw. 2012. [Google Scholar] [CrossRef]
- Chen, Y.S.; Lin, Y.W. Mobicast routing protocol for underwater sensor networks. IEEE Sens. J. 2013, 13, 737–749. [Google Scholar] [CrossRef]
- Yoon, S.; Azad, A.K.; Oh, H.; Kim, S. AURP: An AUV-aided underwater routing protocol for underwater acoustic sensor networks. Sensors 2012, 12, 1827–1845. [Google Scholar] [CrossRef] [PubMed]
- Dai, F.; Wu, J. An extended localized algorithm for connected dominating set formation in ad hoc wireless networks. IEEE Trans. Parallel Distrib. Syst. 2004, 15, 908–920. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Javaid, N.; Ilyas, N.; Ahmad, A.; Alrajeh, N.; Qasim, U.; Khan, Z.A.; Liaqat, T.; Khan, M.I. An Efficient Data-Gathering Routing Protocol for Underwater Wireless Sensor Networks. Sensors 2015, 15, 29149-29181. https://doi.org/10.3390/s151129149
Javaid N, Ilyas N, Ahmad A, Alrajeh N, Qasim U, Khan ZA, Liaqat T, Khan MI. An Efficient Data-Gathering Routing Protocol for Underwater Wireless Sensor Networks. Sensors. 2015; 15(11):29149-29181. https://doi.org/10.3390/s151129149
Chicago/Turabian StyleJavaid, Nadeem, Naveed Ilyas, Ashfaq Ahmad, Nabil Alrajeh, Umar Qasim, Zahoor Ali Khan, Tayyaba Liaqat, and Majid Iqbal Khan. 2015. "An Efficient Data-Gathering Routing Protocol for Underwater Wireless Sensor Networks" Sensors 15, no. 11: 29149-29181. https://doi.org/10.3390/s151129149
APA StyleJavaid, N., Ilyas, N., Ahmad, A., Alrajeh, N., Qasim, U., Khan, Z. A., Liaqat, T., & Khan, M. I. (2015). An Efficient Data-Gathering Routing Protocol for Underwater Wireless Sensor Networks. Sensors, 15(11), 29149-29181. https://doi.org/10.3390/s151129149