
Development and Evaluation of a UAV-Photogrammetry System for Precise 3D Environmental Modeling


Abstract
:1. Introduction
1.1. Background
1.2. Environmental Application
1.3. Objectives and Assumptions
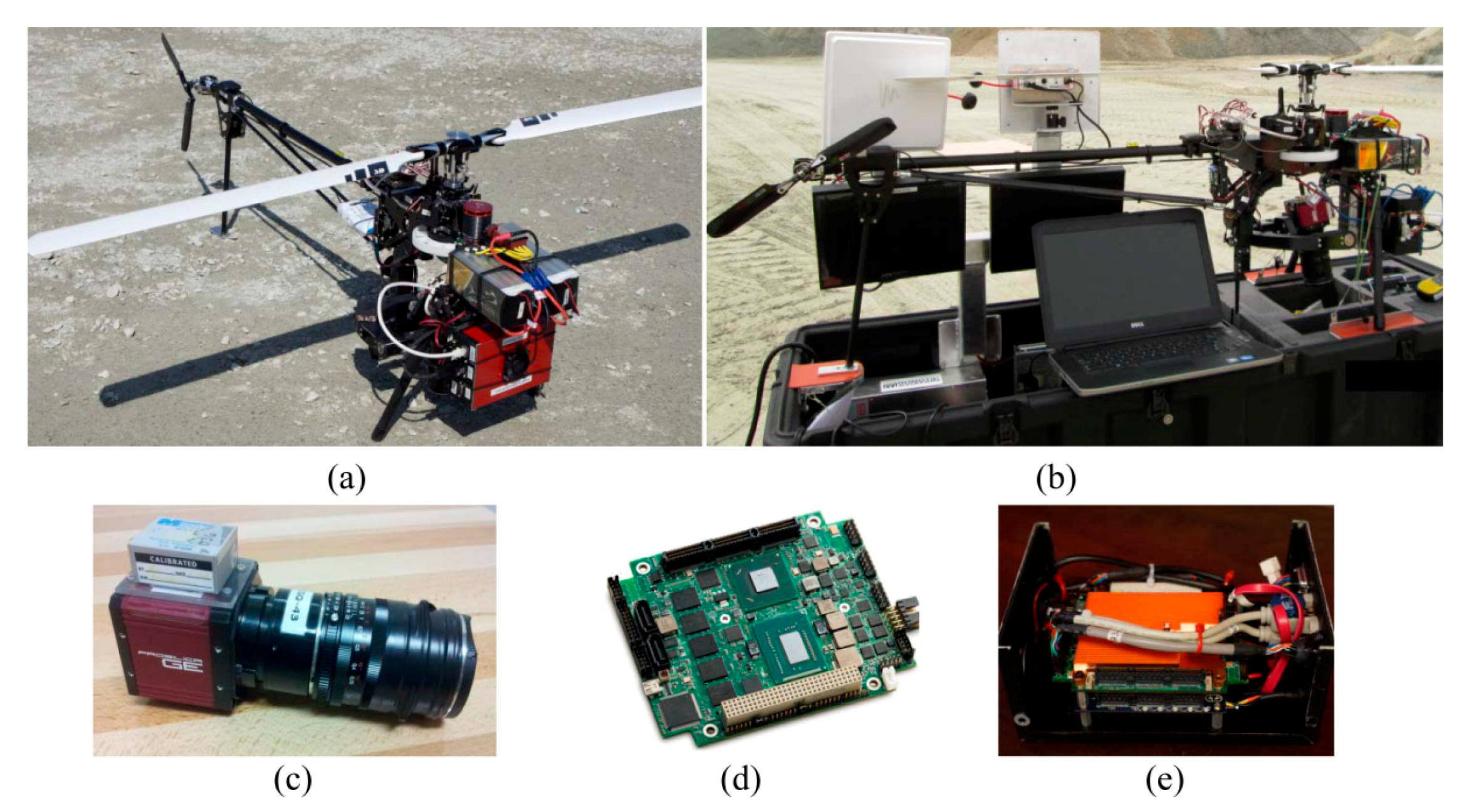
2. Equipment
2.1. Platform
2.2. Navigation Sensor
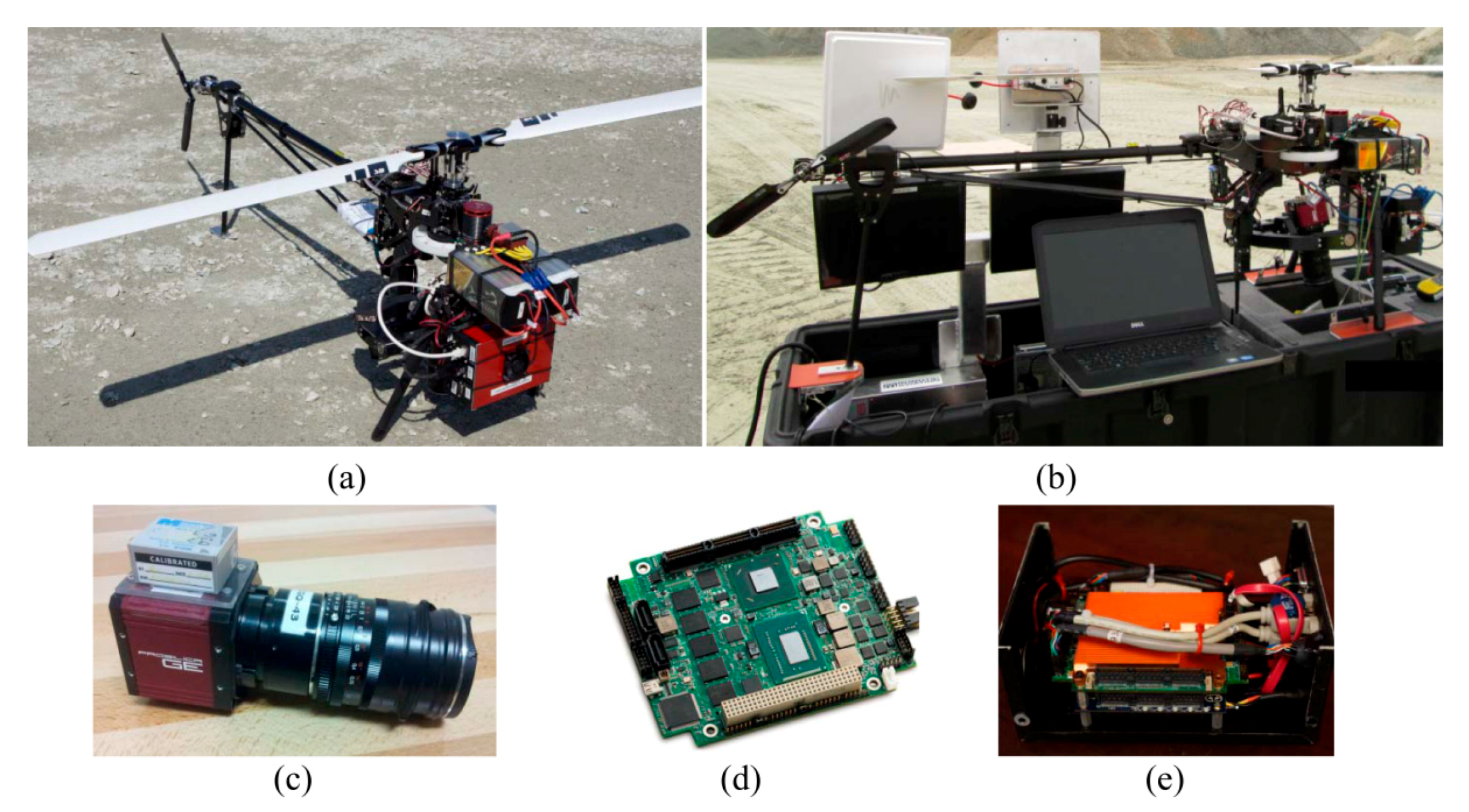
2.3. Imaging Sensor
2.4. Onboard Computer
3. System Development
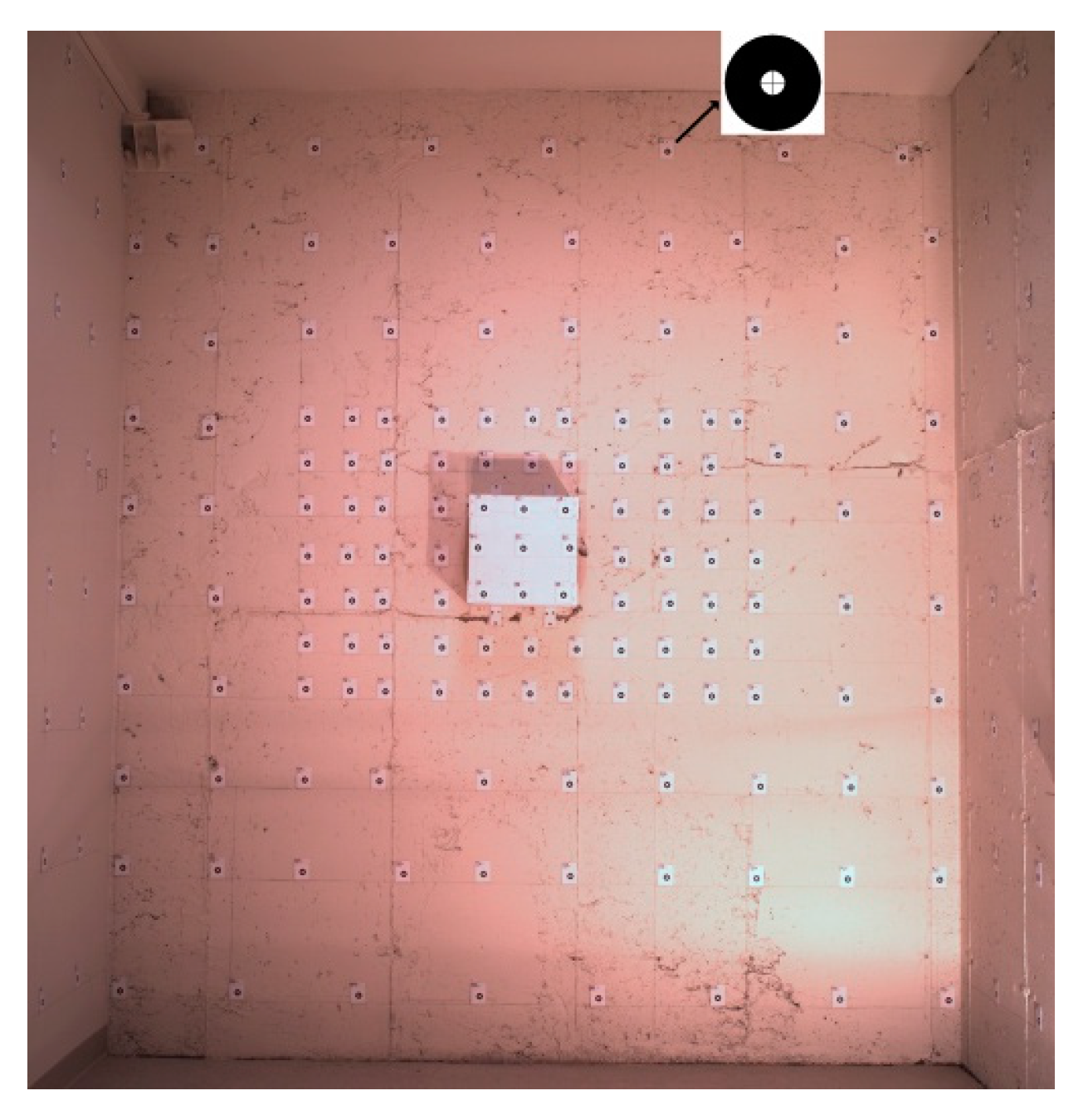
3.1. Camera Calibration
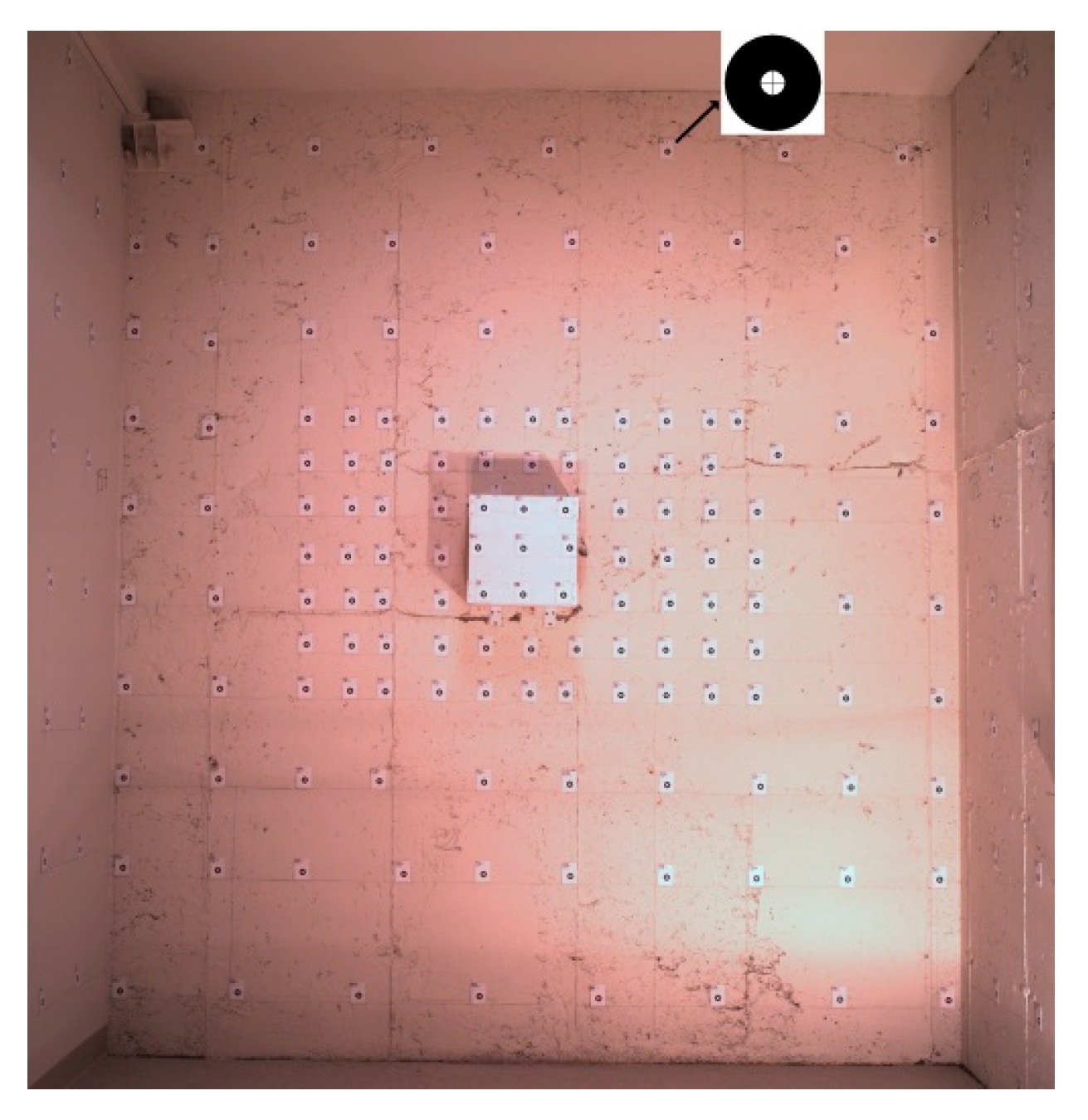
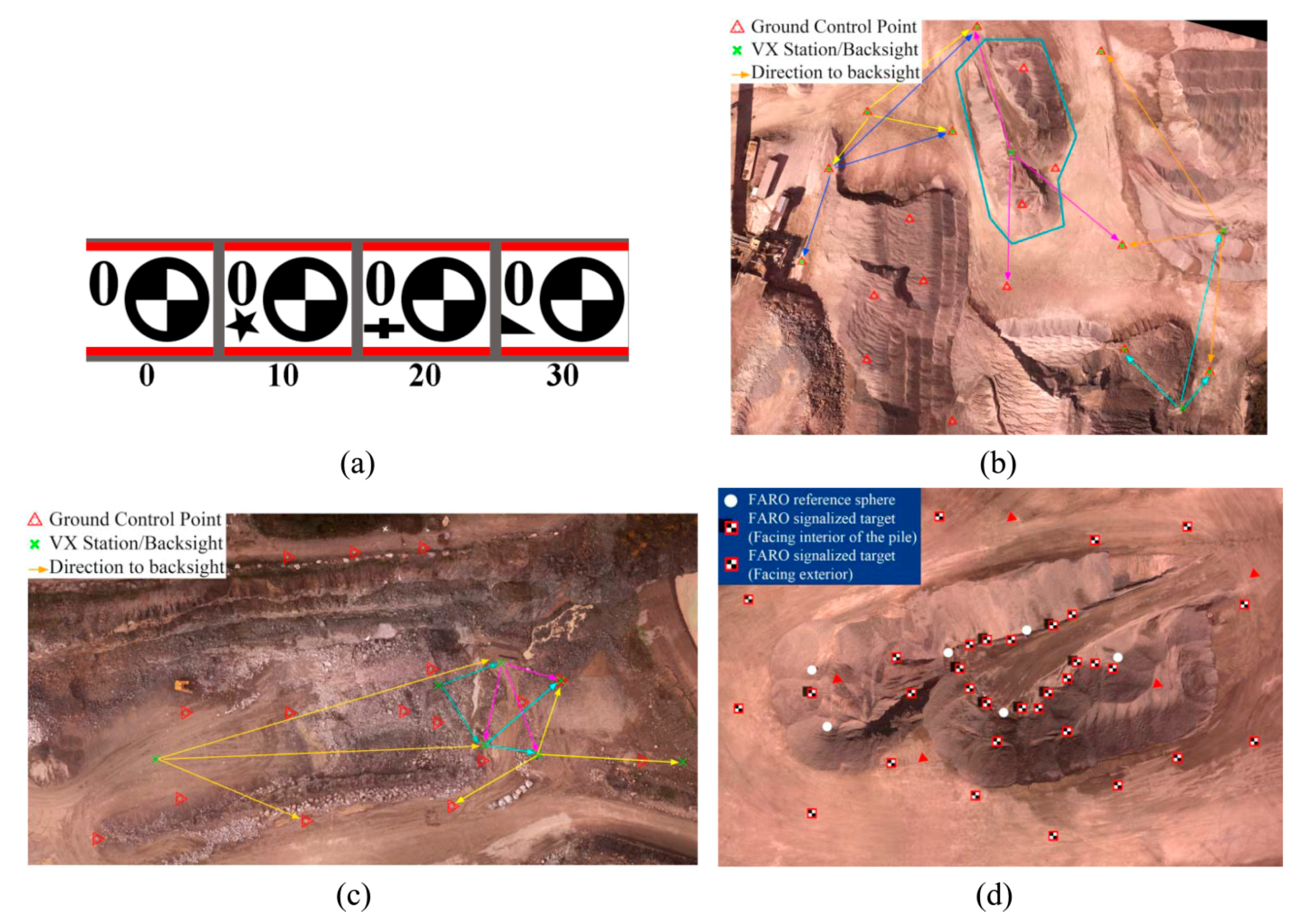
3.1.1. Design of the Calibration Test-Field
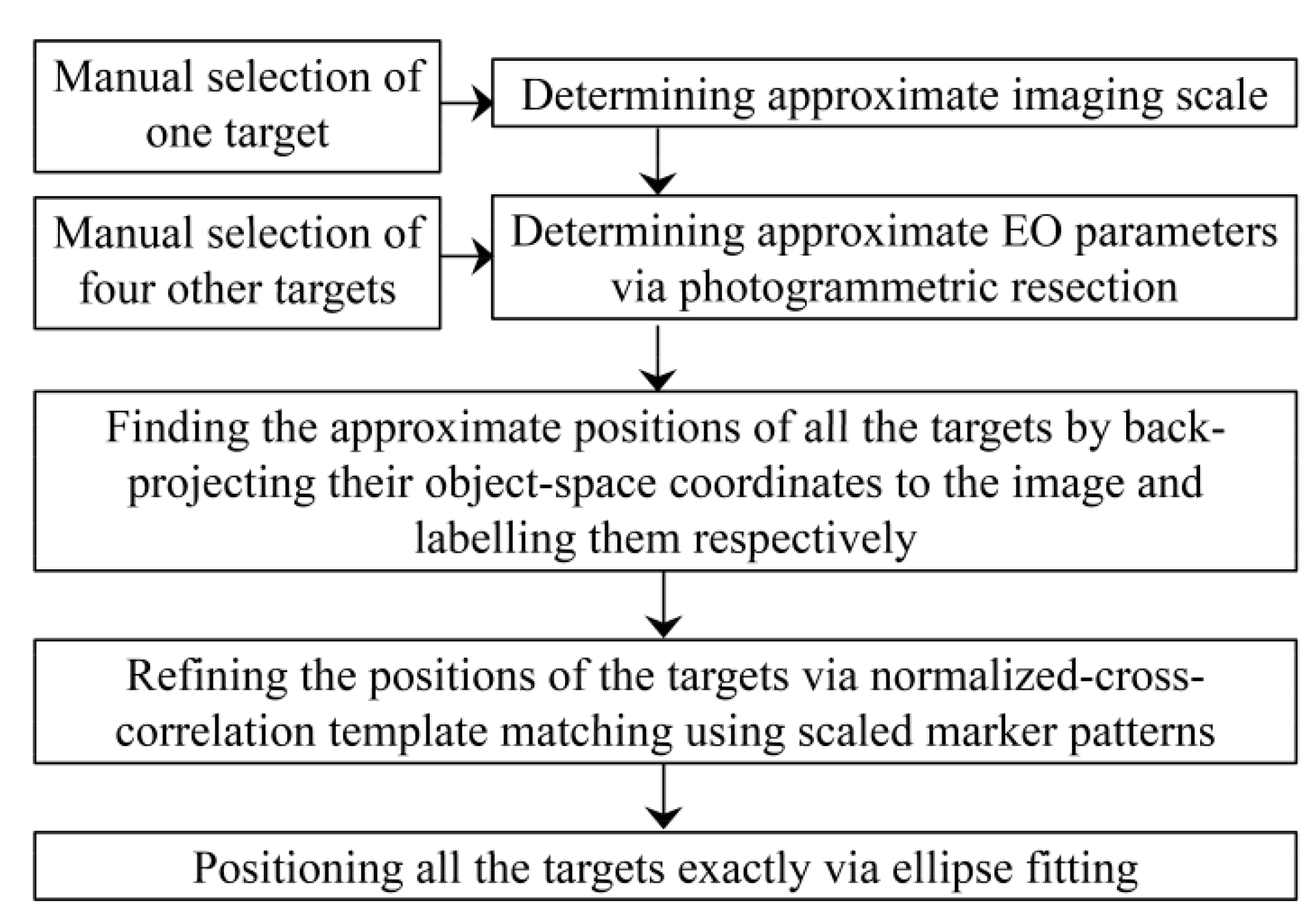
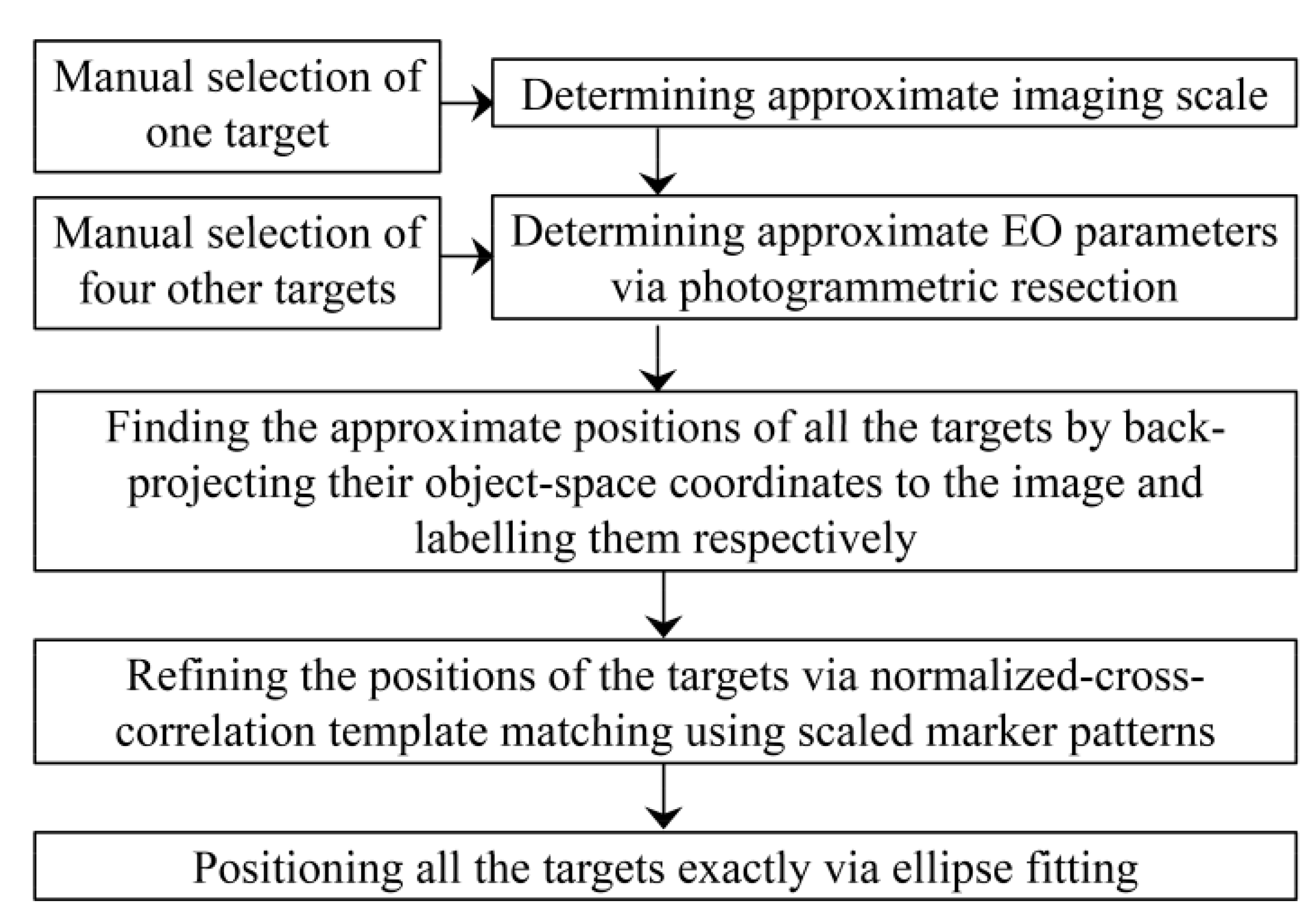
3.1.2. Target Detection
3.2. Aerial Platform Calibration

3.3. System Integration
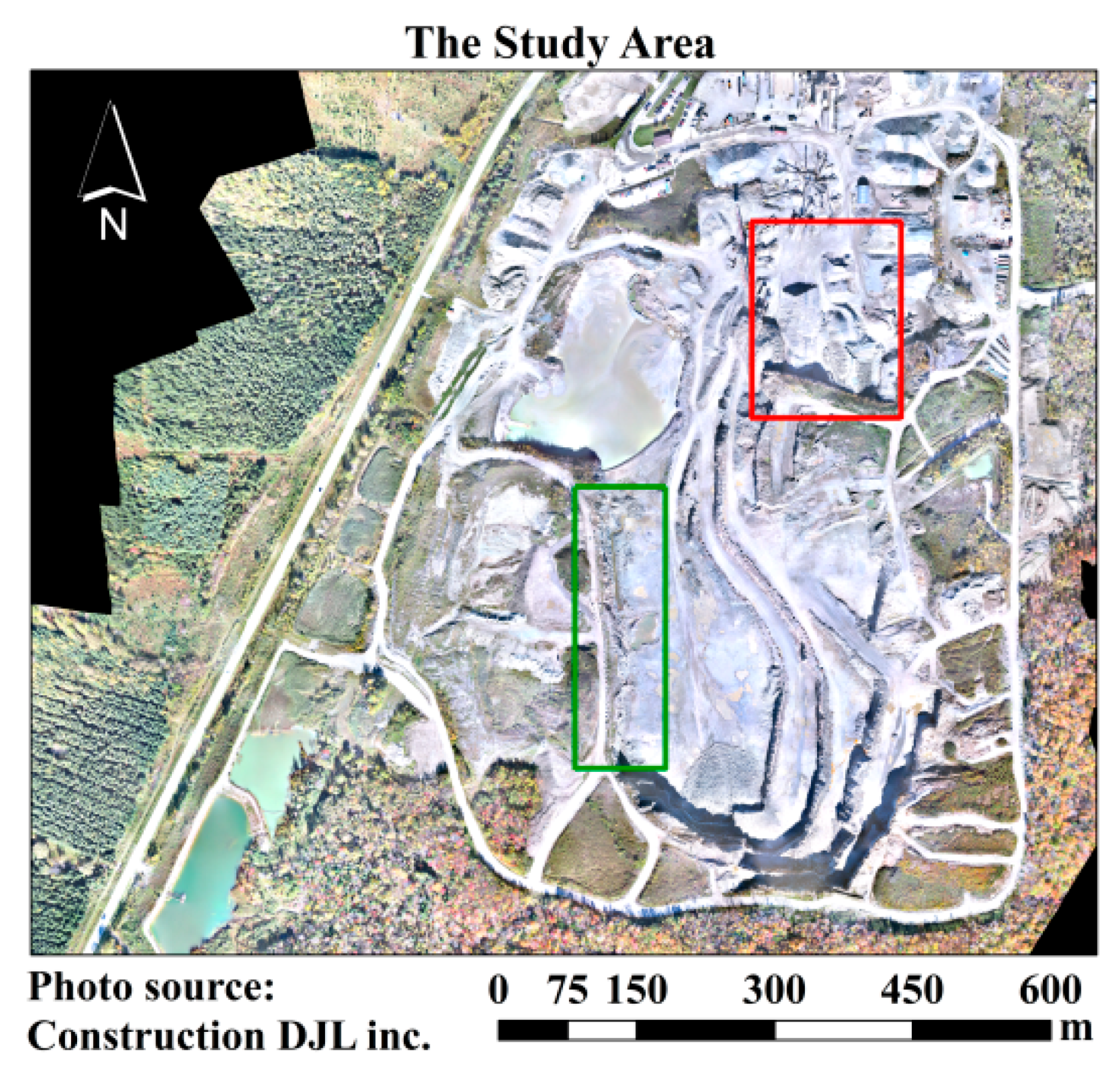
4. Data Acquisition
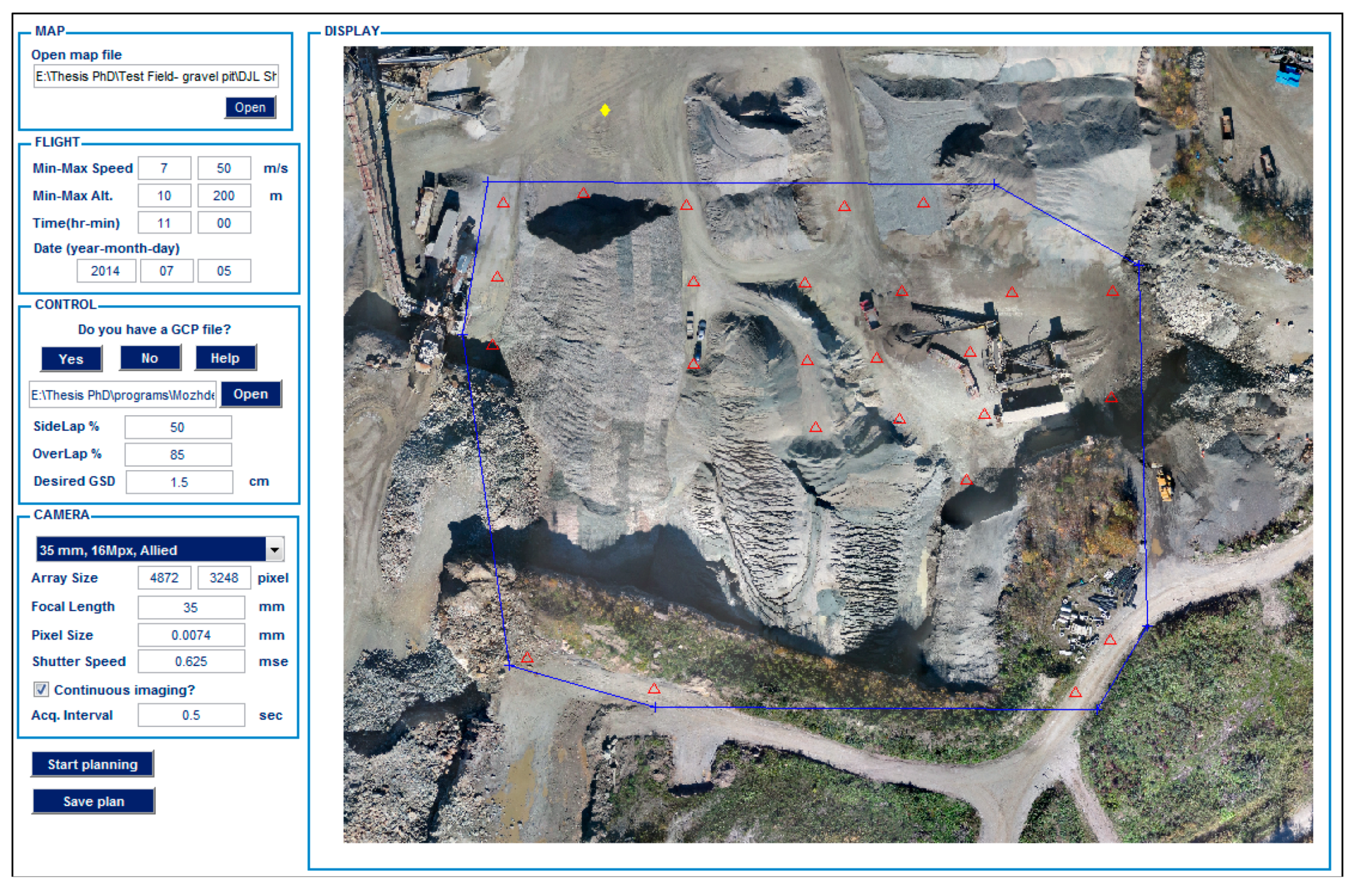
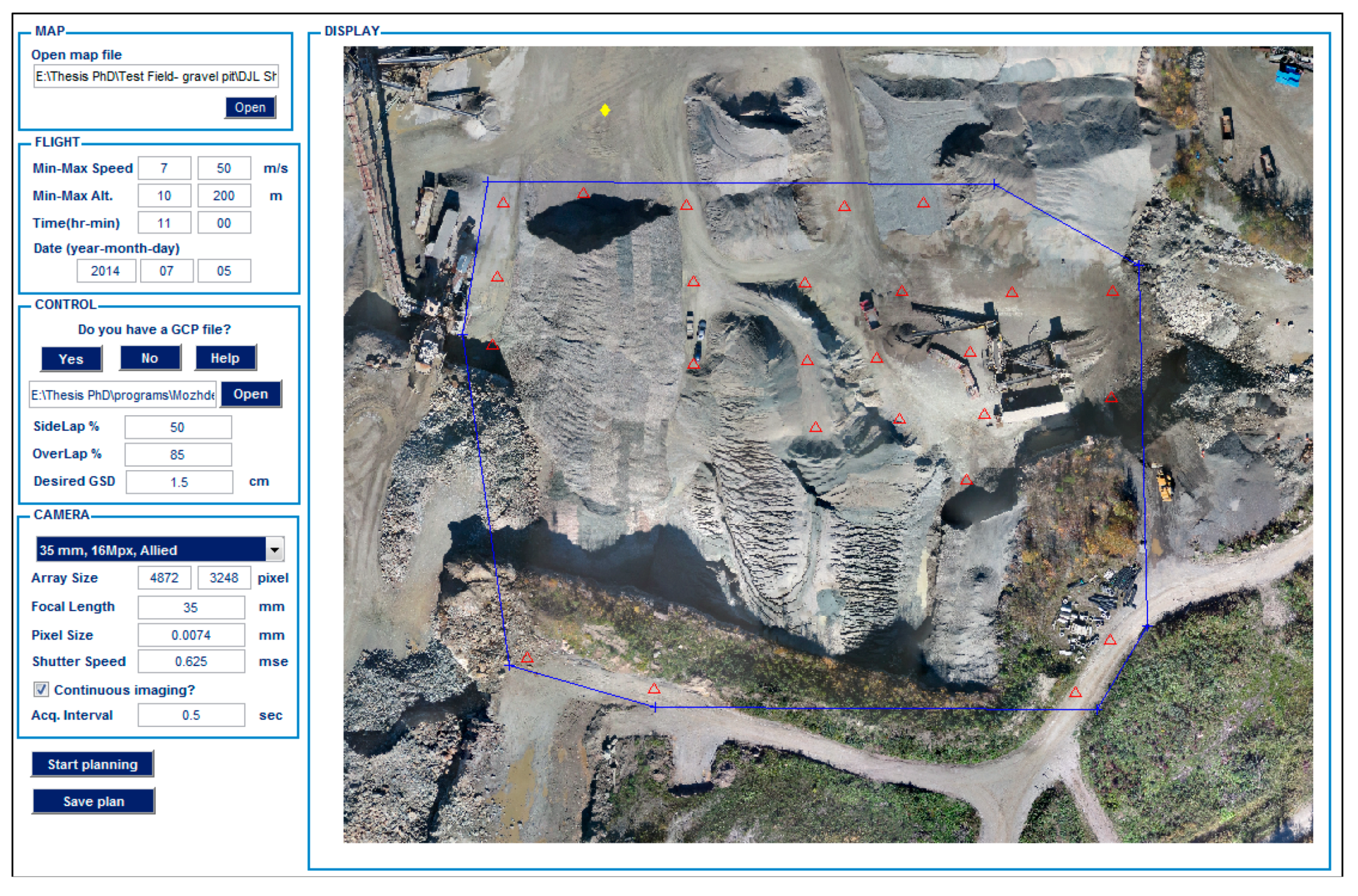
4.1. Data-Acquisition Planning
4.2. Fieldwork

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
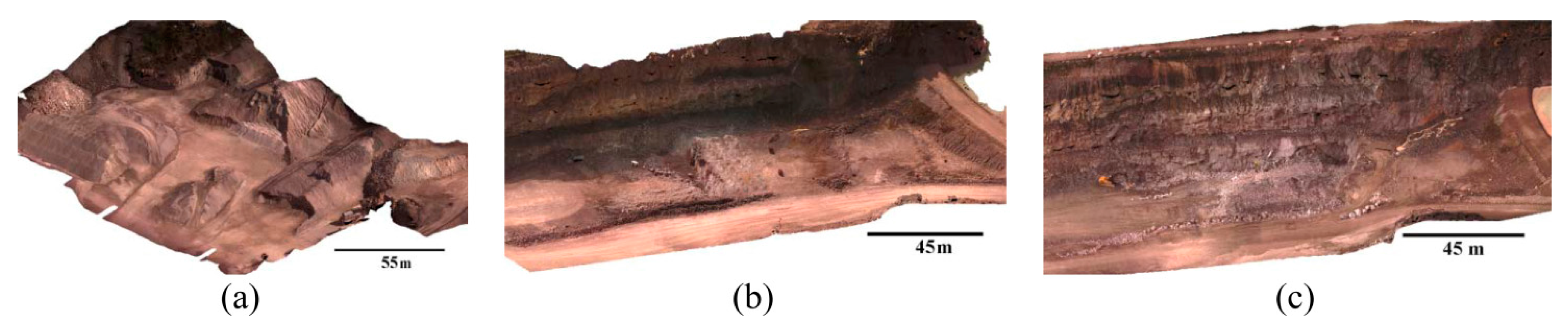
| Characteristic | Flight Date | ||
|---|---|---|---|
| August 2014 | August 2014 | October 2014 | |
| Dataset A | Dataset B | Dataset C | |
| Weather temperature (°C) | 22 | 26 | 10 |
| Wind speed (Km/h) | 8 | 19 | 8 |
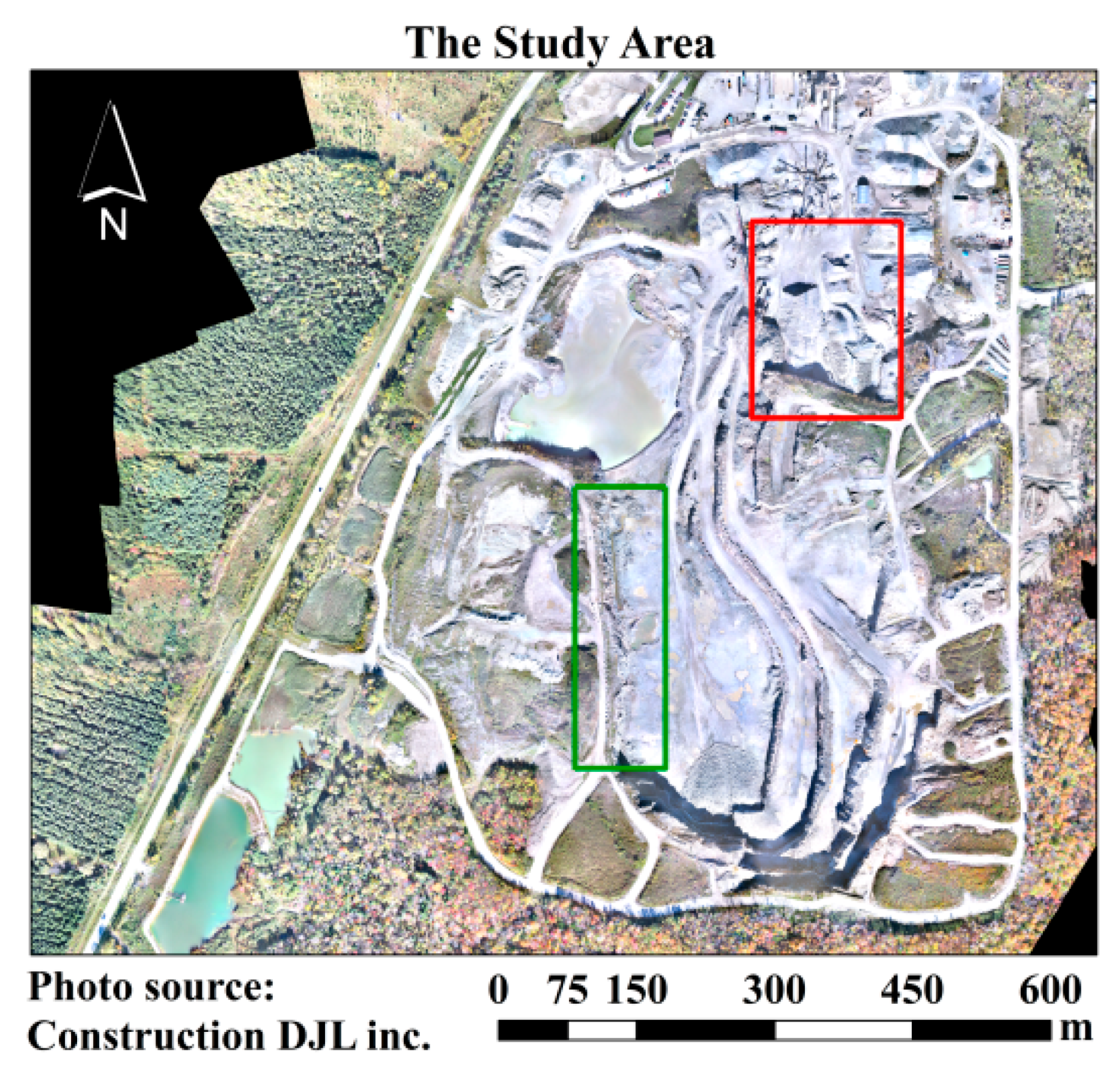
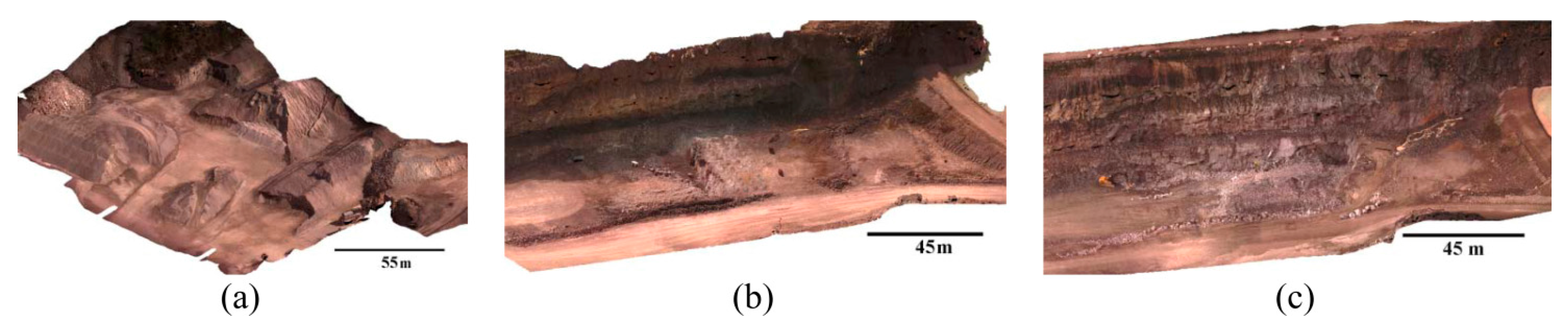
| Zone structure | Stockpiles | Cliffs | Cliffs |
| Approximate flight altitude (m) | 80 | 90 | 90 |
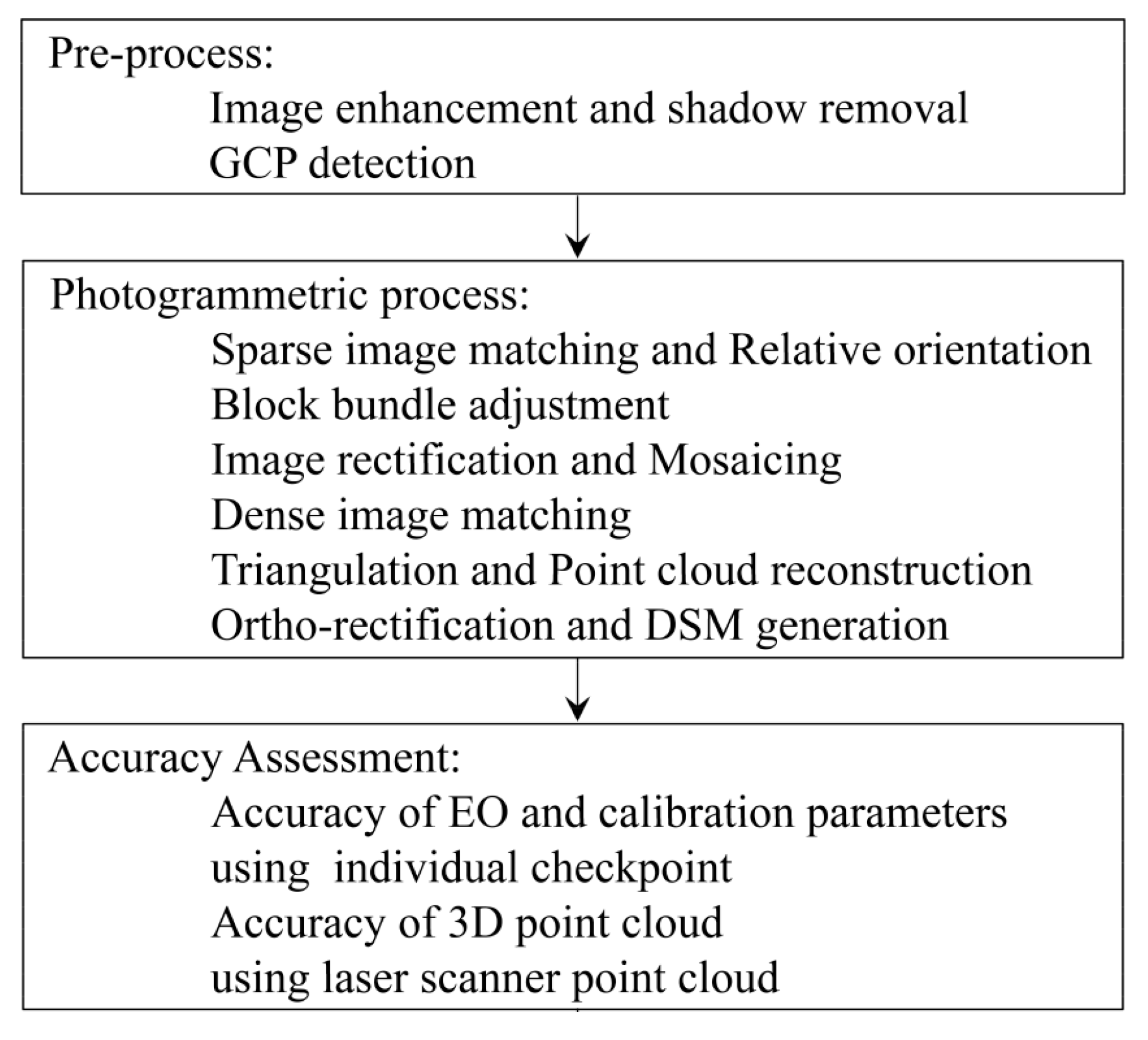
5. Data Processing Workflow
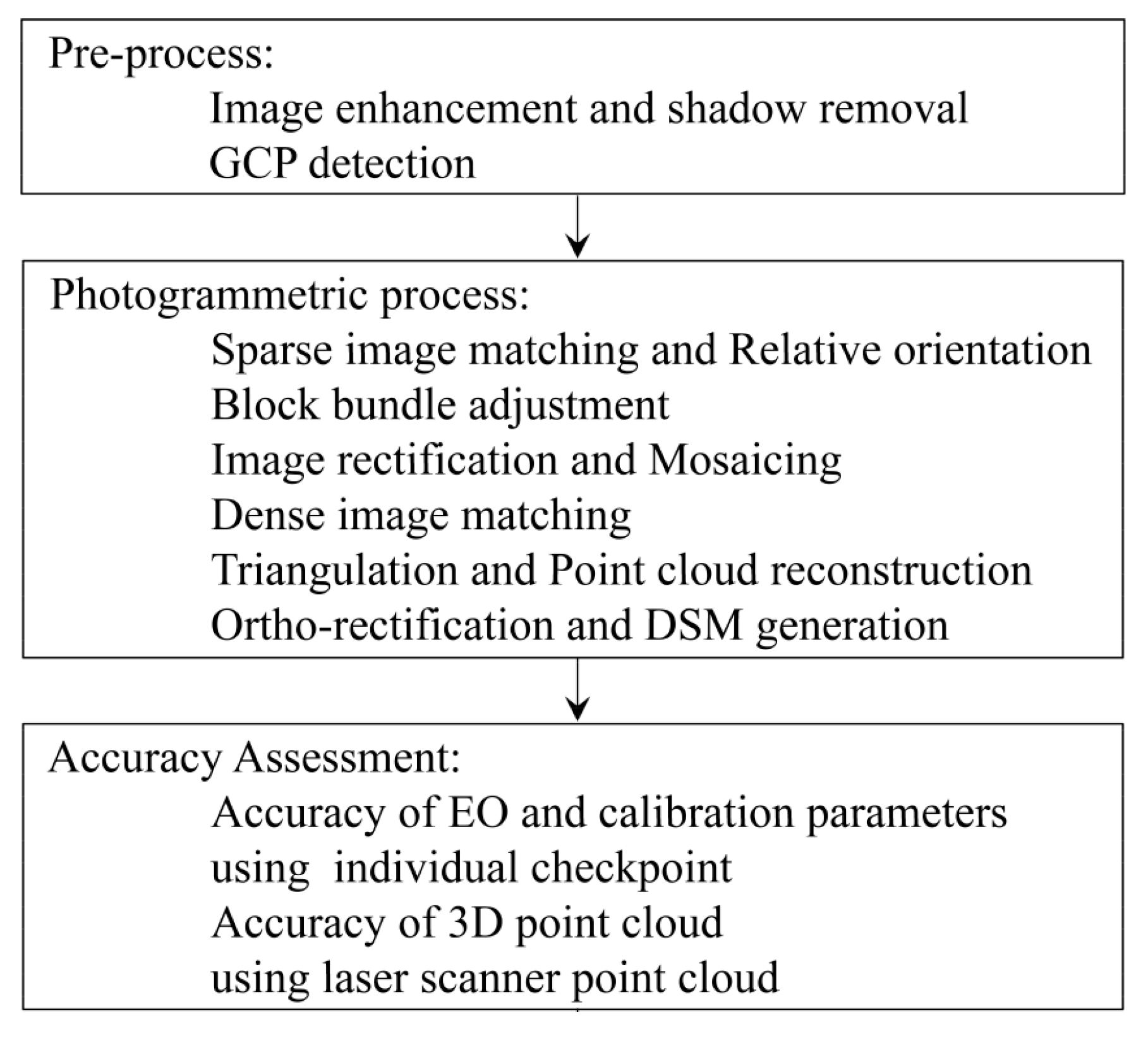
5.1. Image Pre-Processing
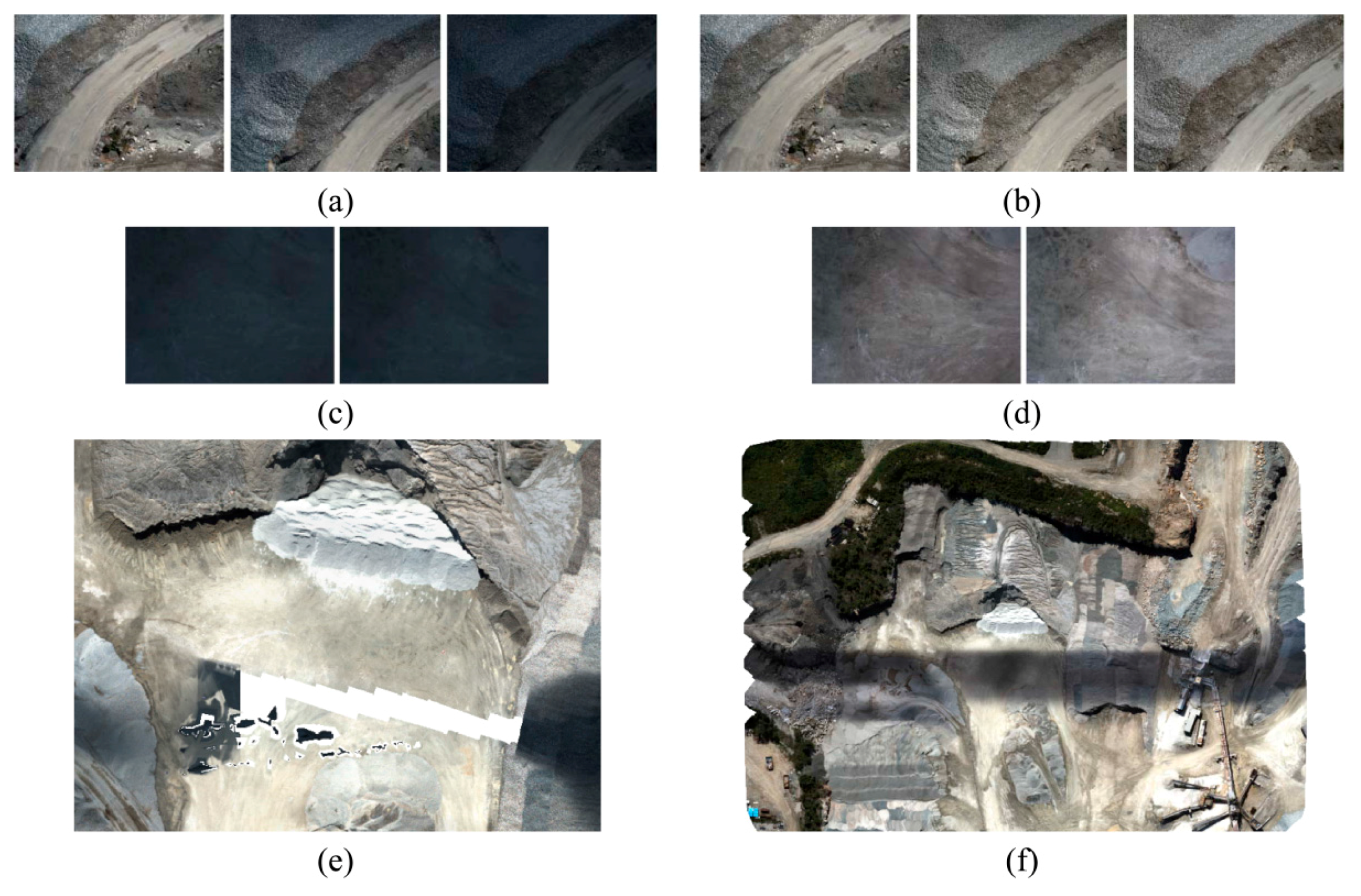
5.1.1. Intensity Enhancement
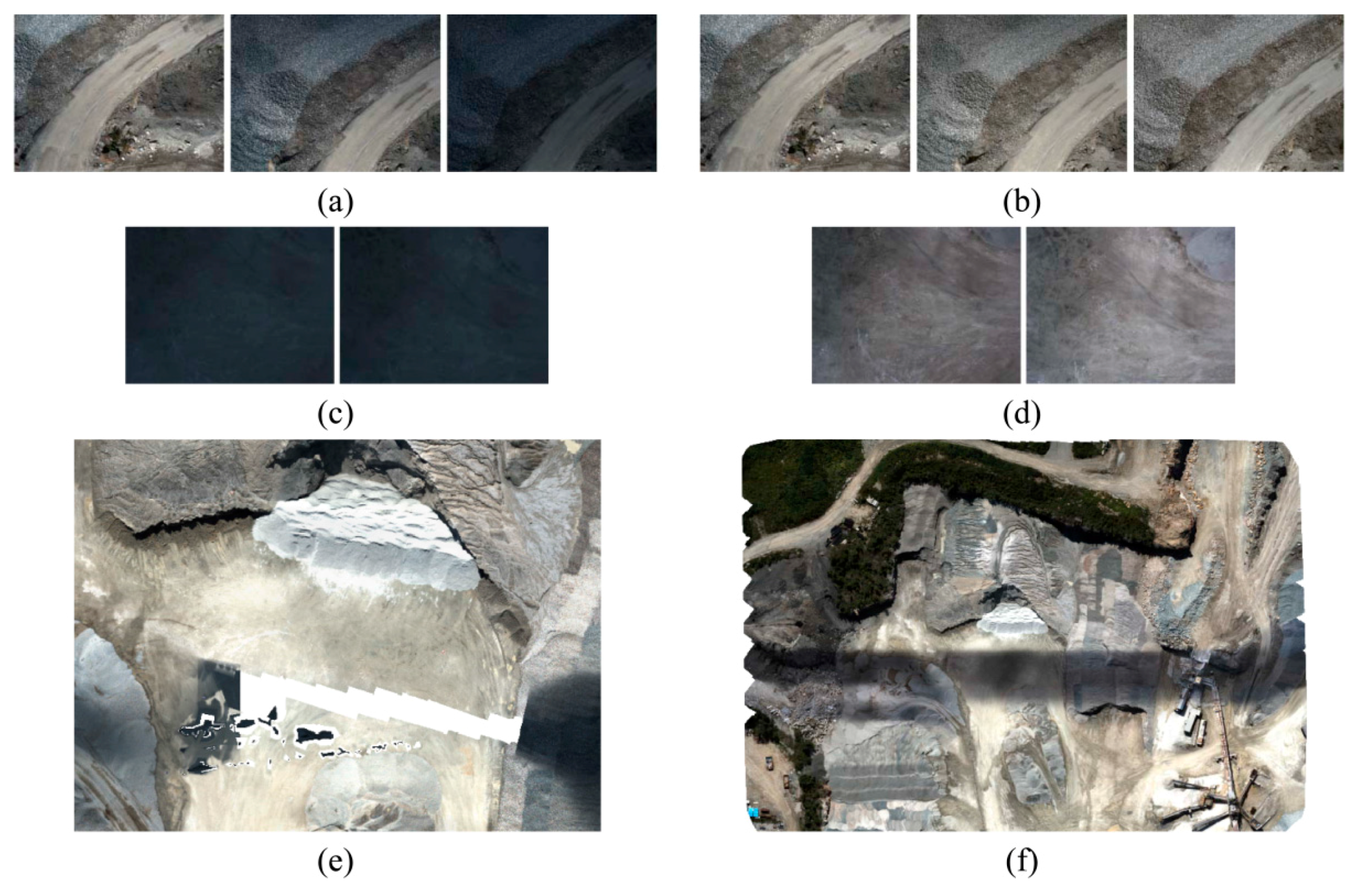
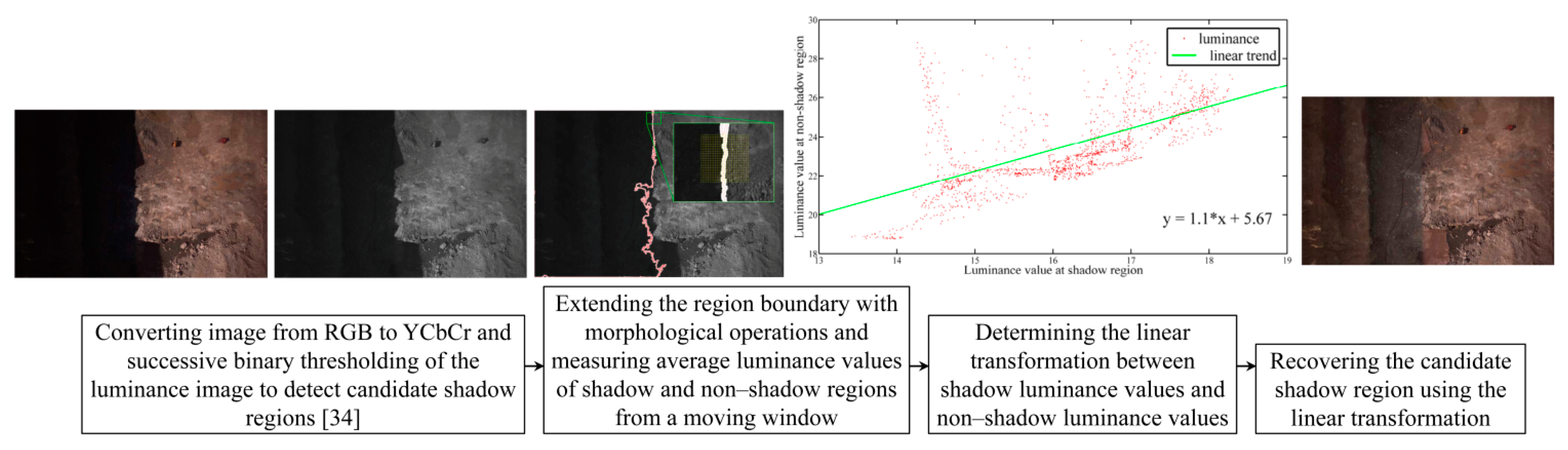
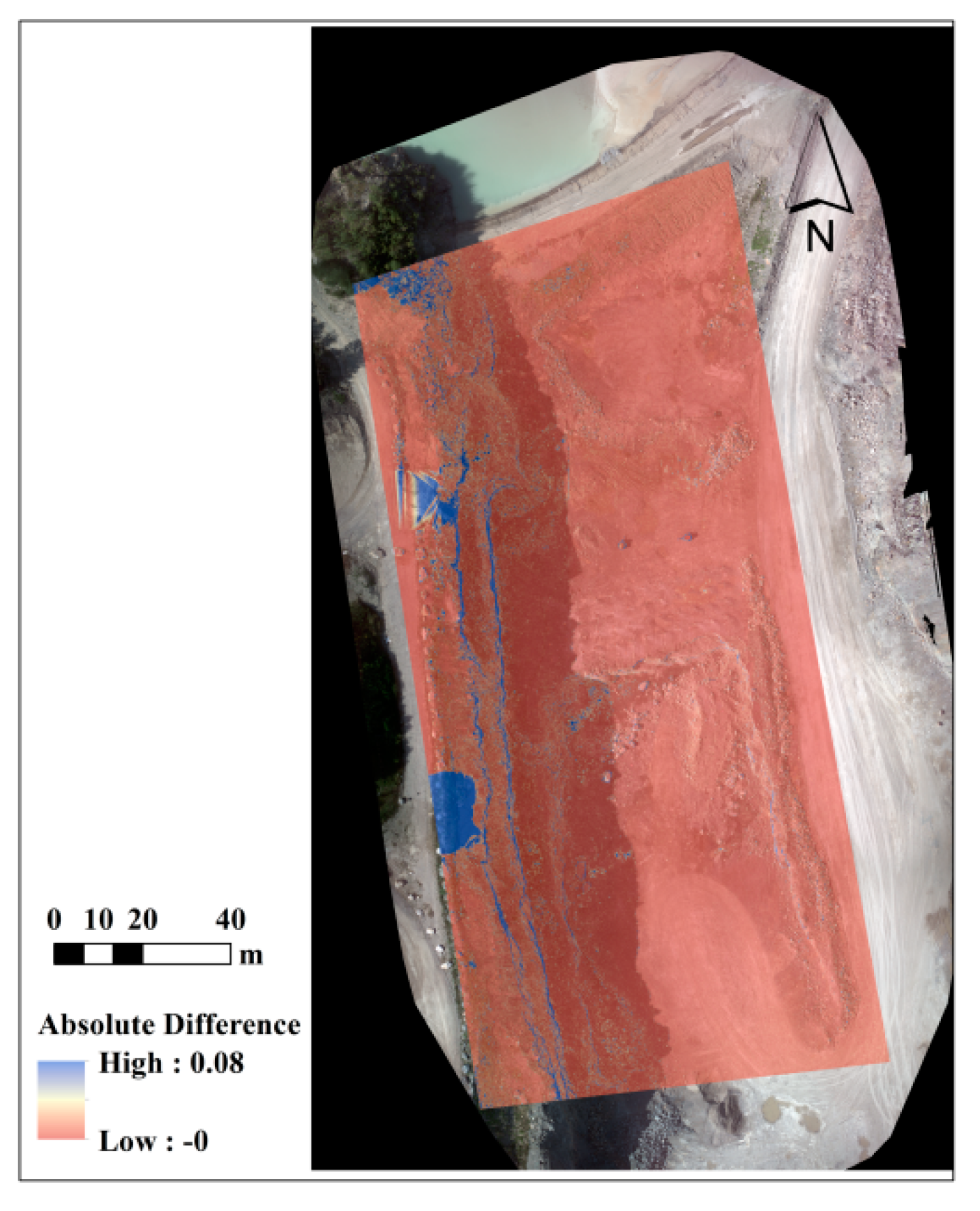
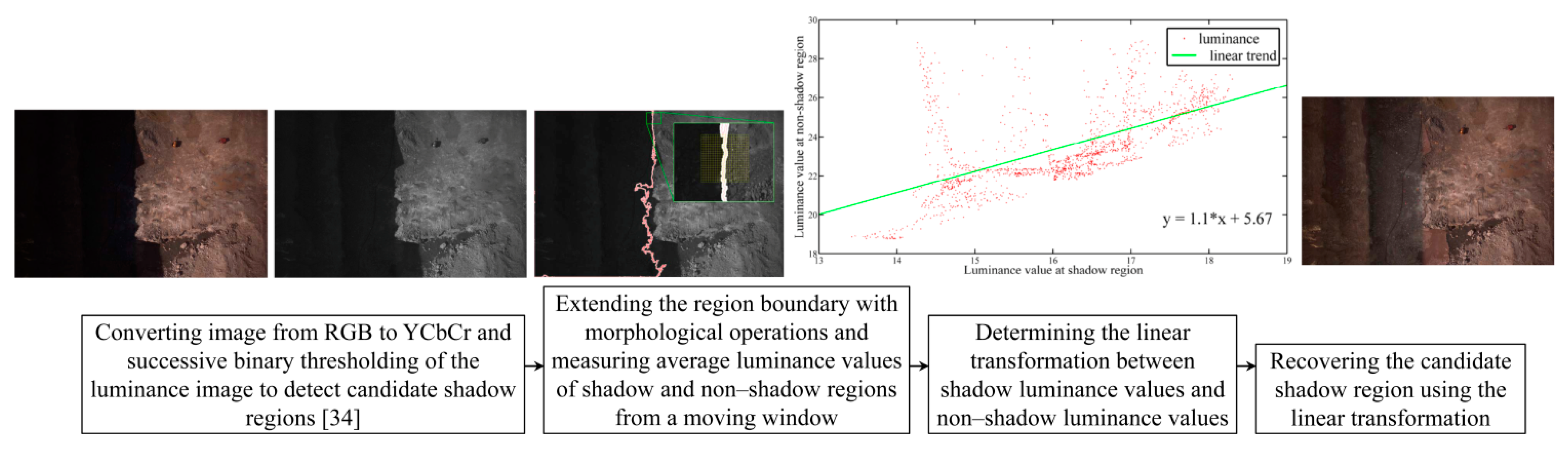
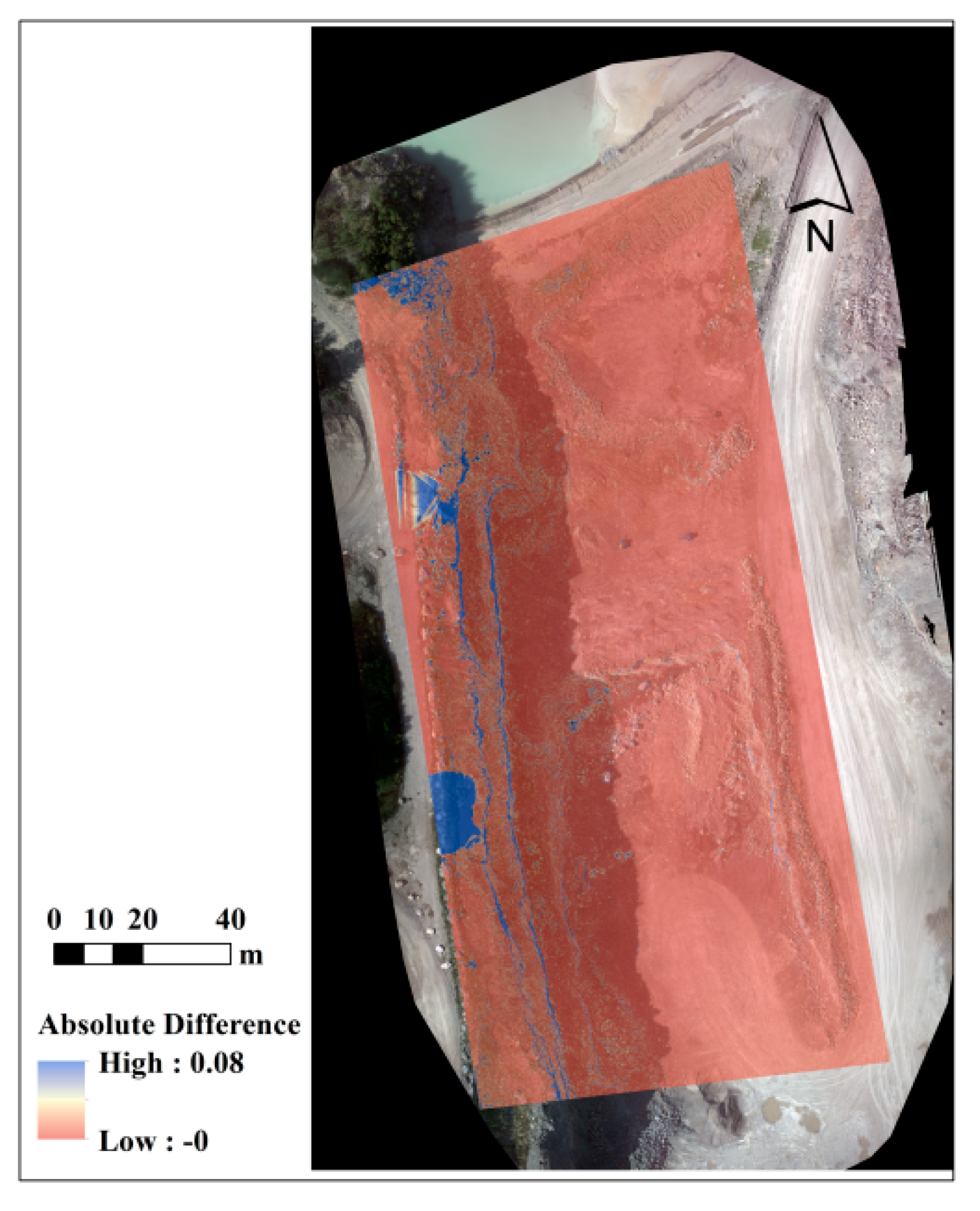
5.1.2. Shadow Removal
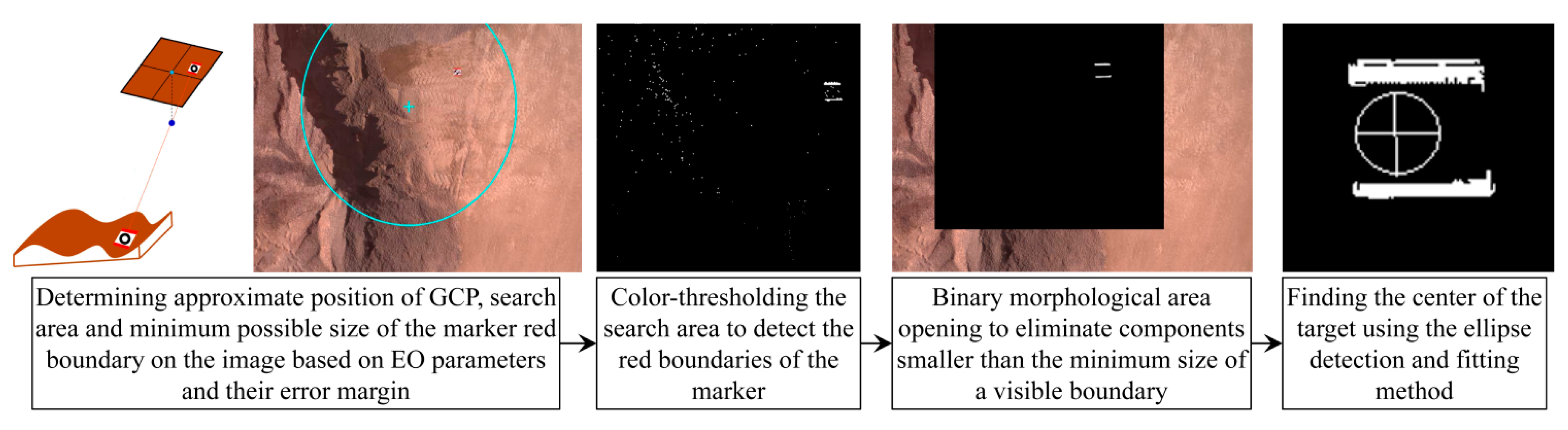
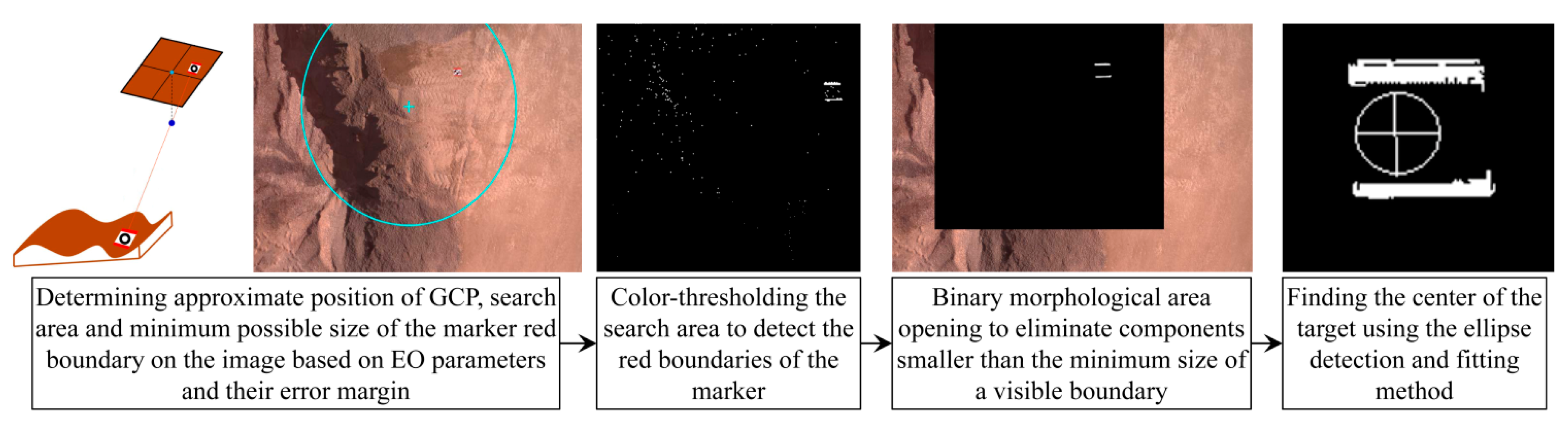
5.1.3. GCP Detection
5.2. Photogrammetric Processing
6. Experiments
6.1. Laboratory Experiments
6.1.1. Calibration
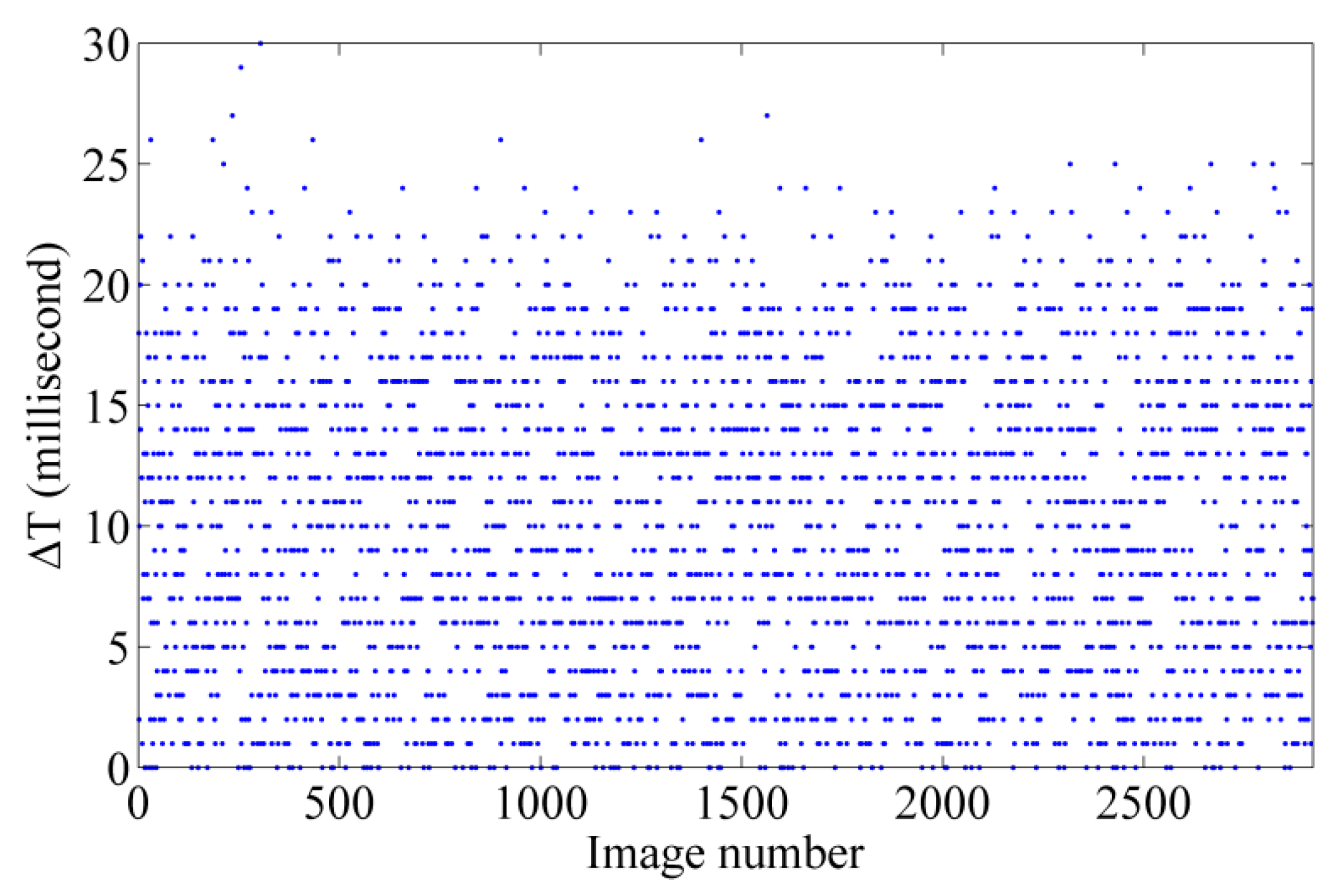
6.1.2. Time Synchronization
6.2. Photogrammetric Tests
| Test Label | Figure | Descriptions | |
|---|---|---|---|
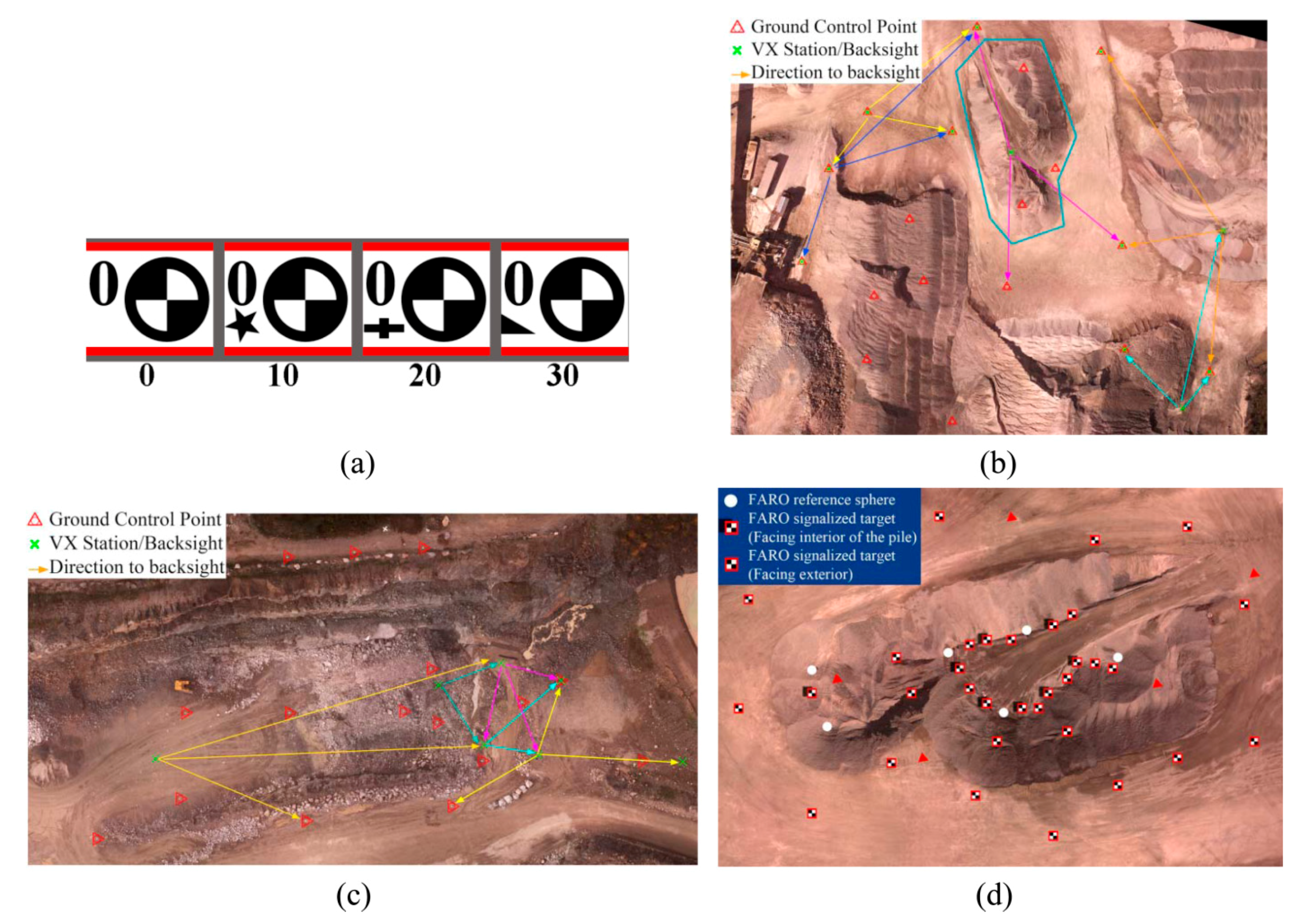
| GCPTest 1 |  | Number of GCPs | 22 |
| Distribution | Covering the whole imaging zone | ||
| GCPTest 2 |  | Number of GCPs | 3 |
| Visibility * | 9, 12 and 21 images | ||
| Distribution | Evenly distributed over the imaging zone | ||
| GCPTest 3 |  | Number of GCPs | 3 |
| Visibility | 4–6 images | ||
| Distribution | Well distributed over the imaging zone | ||
| GCPTest 4 |  | Number of GCPs | 3 |
| Visibility | 19, 20 and 22 images | ||
| Distribution | Positioned near the ends of flight strips | ||
| GCPTest 5 |  | Number of GCPs | 3 |
| Visibility | 5, 12 and 21 images | ||
| Distribution | Established at the flight home due to inaccessibility to the rest of the imaging zone | ||
| GCPTest 6 |  | Number of GCPs | 3 |
| Visibility | 15, 17 and 22 images | ||
| Distribution | Established along a hypothetical road due to inaccessibility to other areas | ||
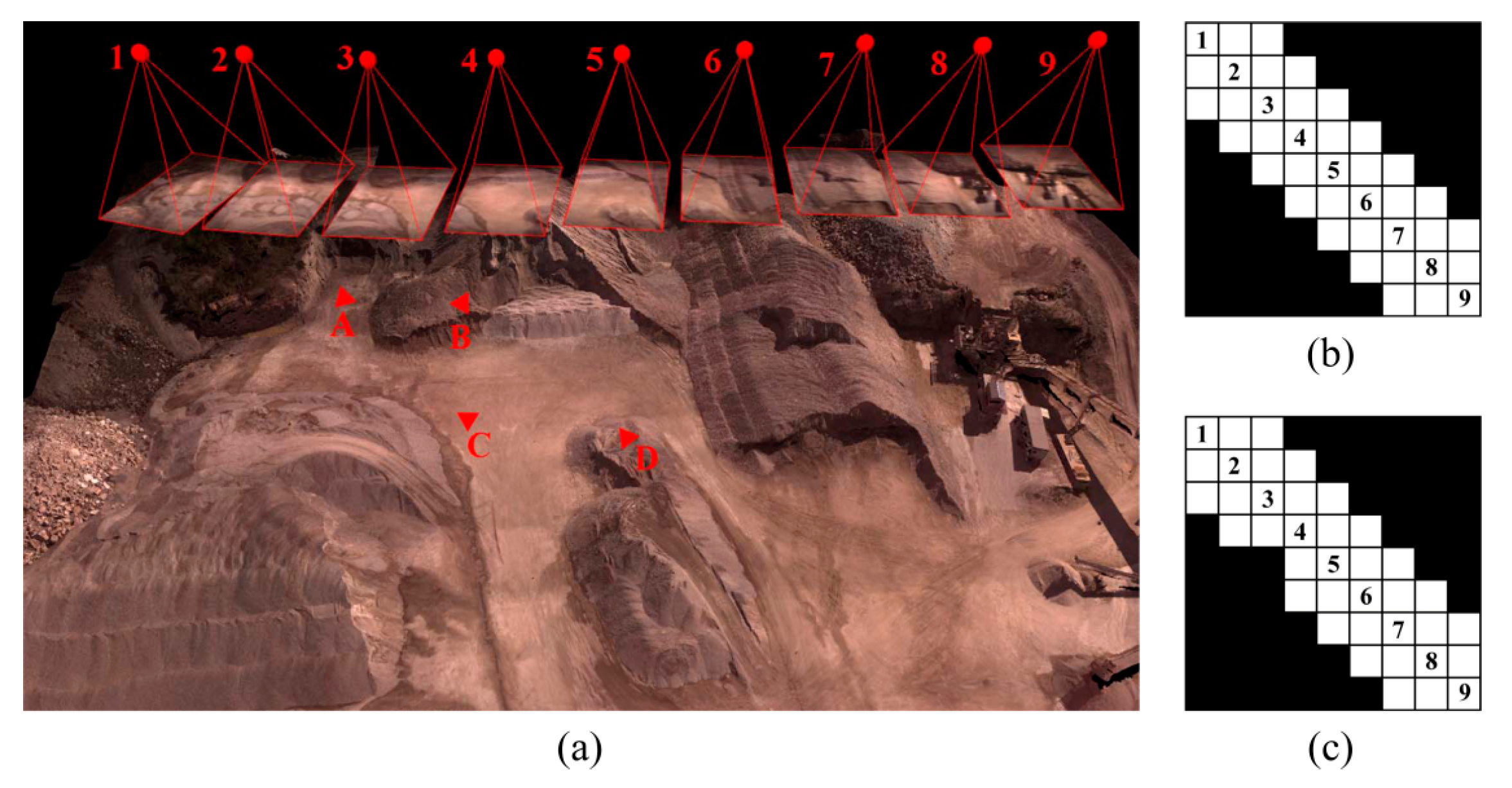
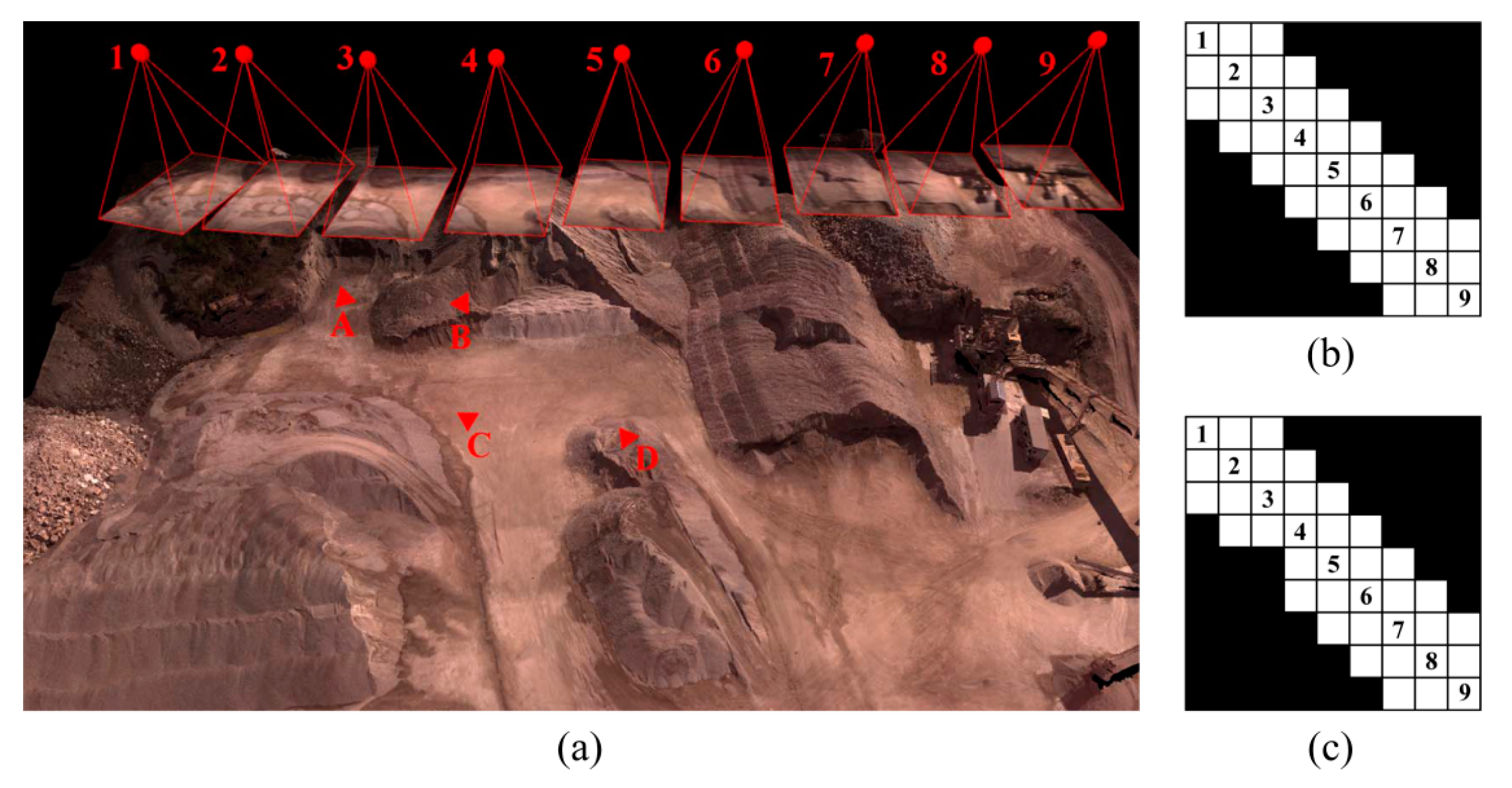
- OverlapTest 1: Each image was overlapped with at least three connected images. For example, image 5 had common tie points with both images 3 and 4. Such a connection is illustrated via the connectivity matrix in Figure 14b.
- OvelapTest 2: The situation was the same as OverlapTest 1. However, image 5 did not have any common tie points with both images 3 and 4; i.e., it was only overlapped with image 4. The connectivity matrix of Figure 14c shows this situation.
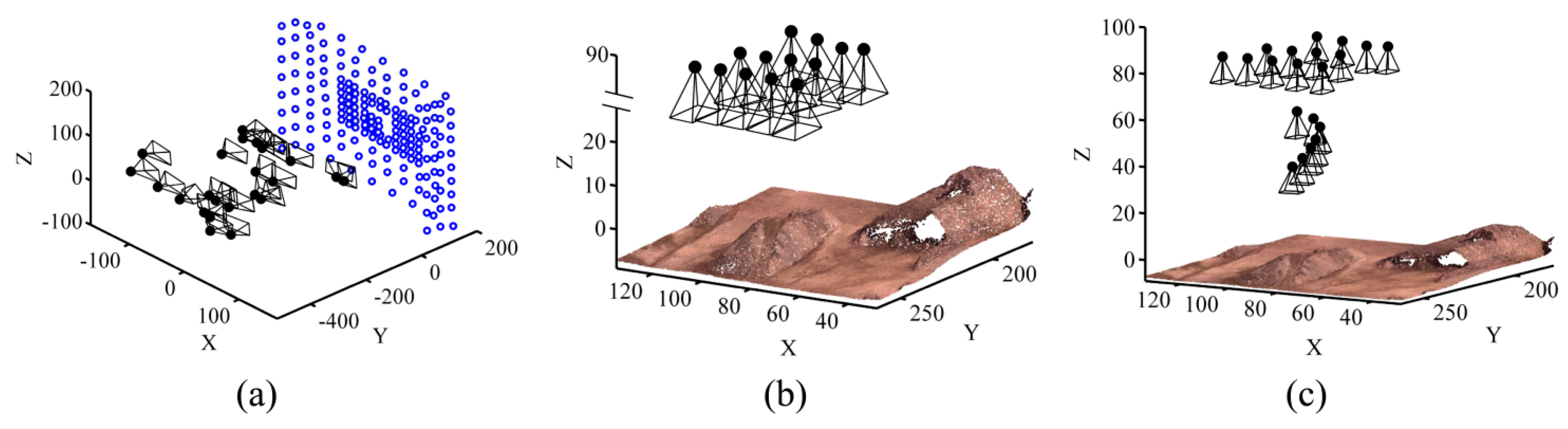
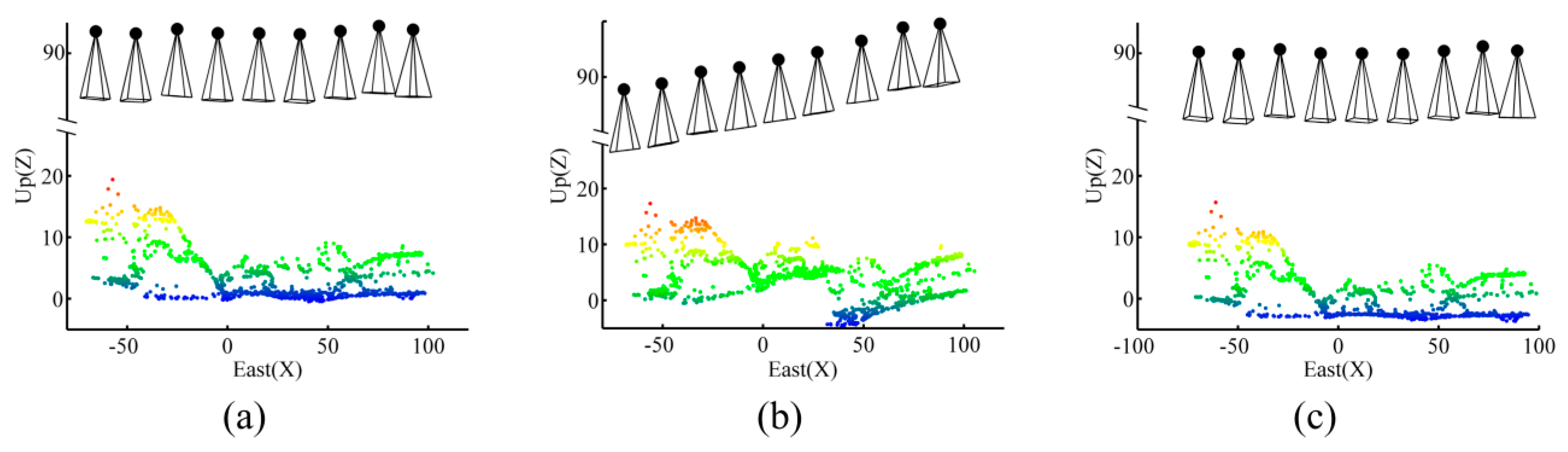
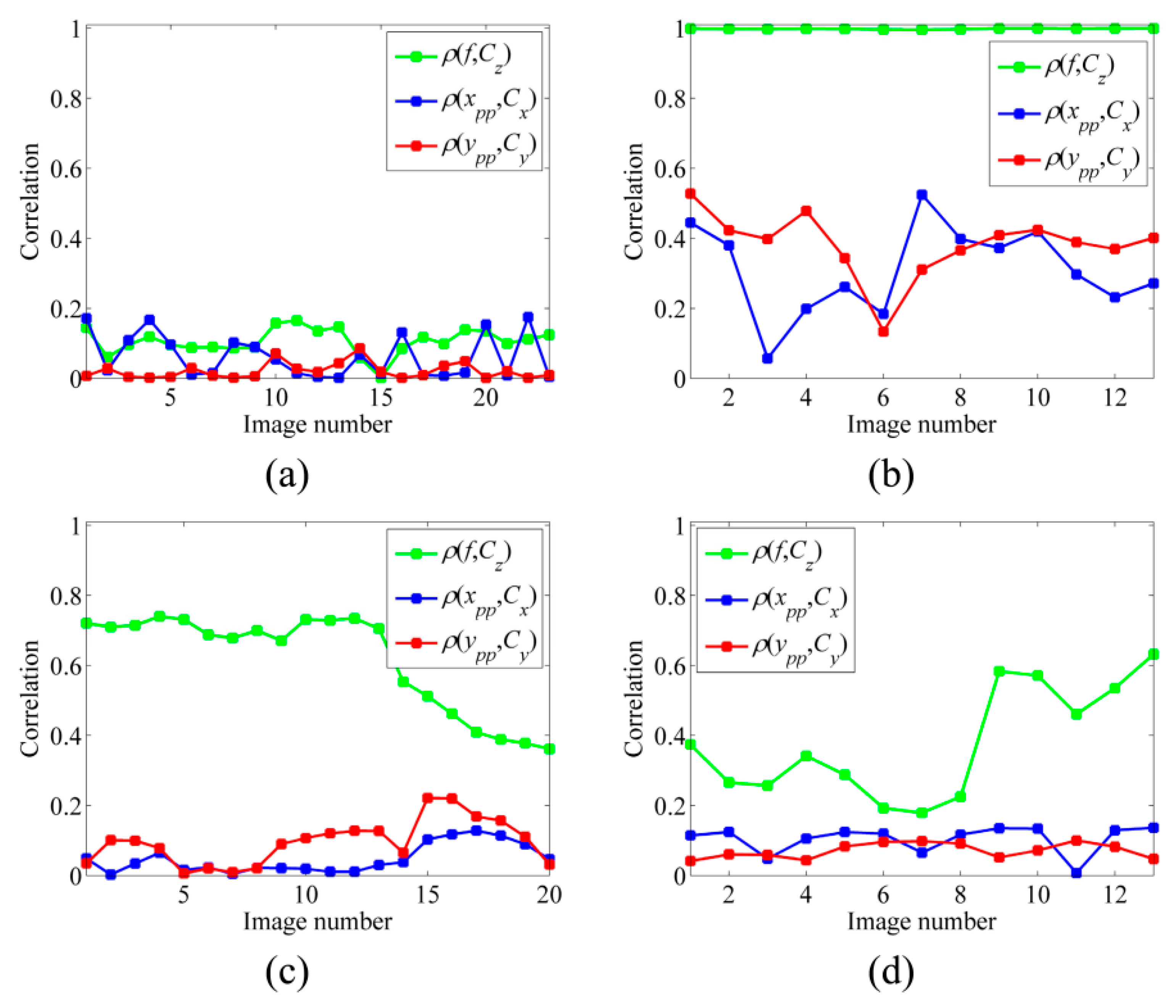
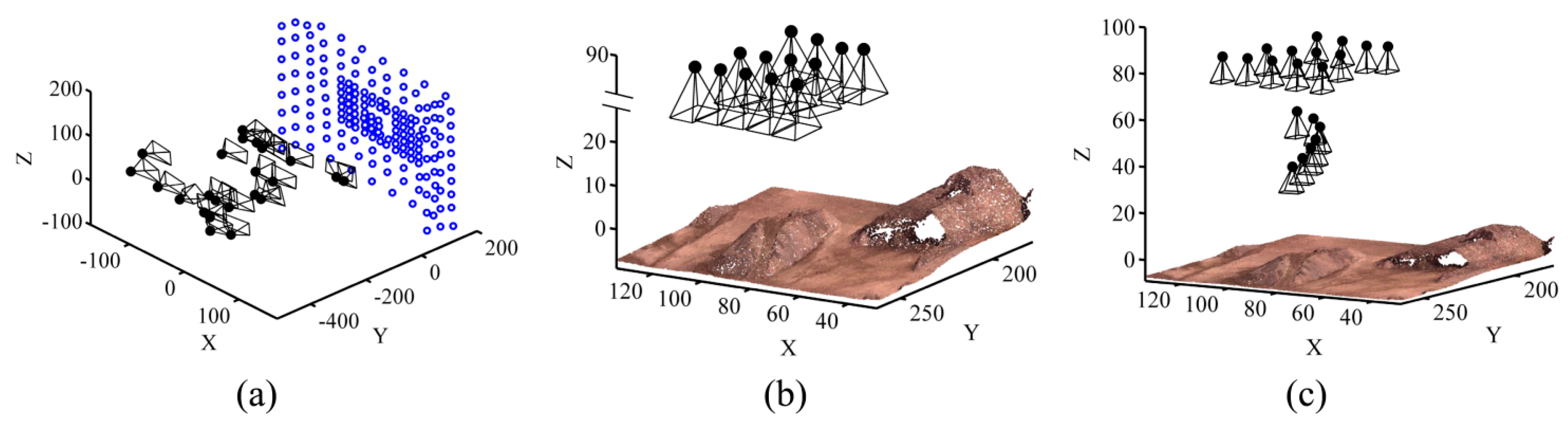
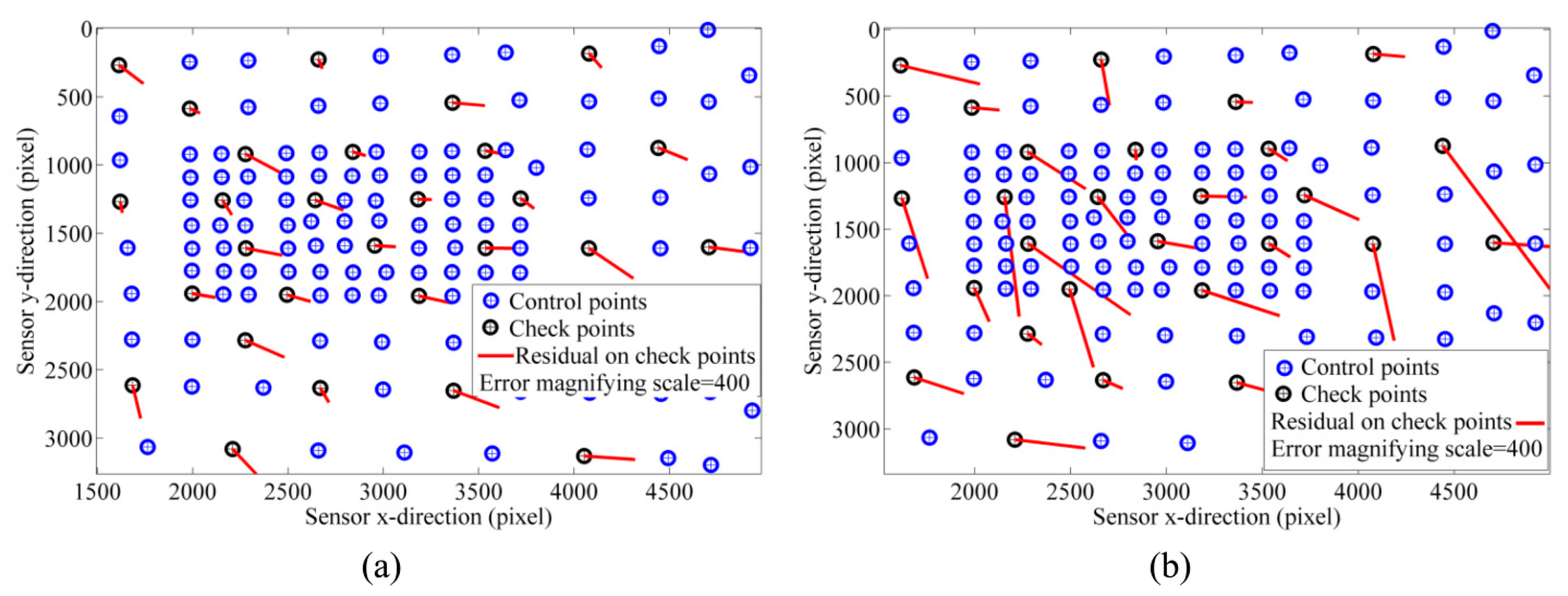
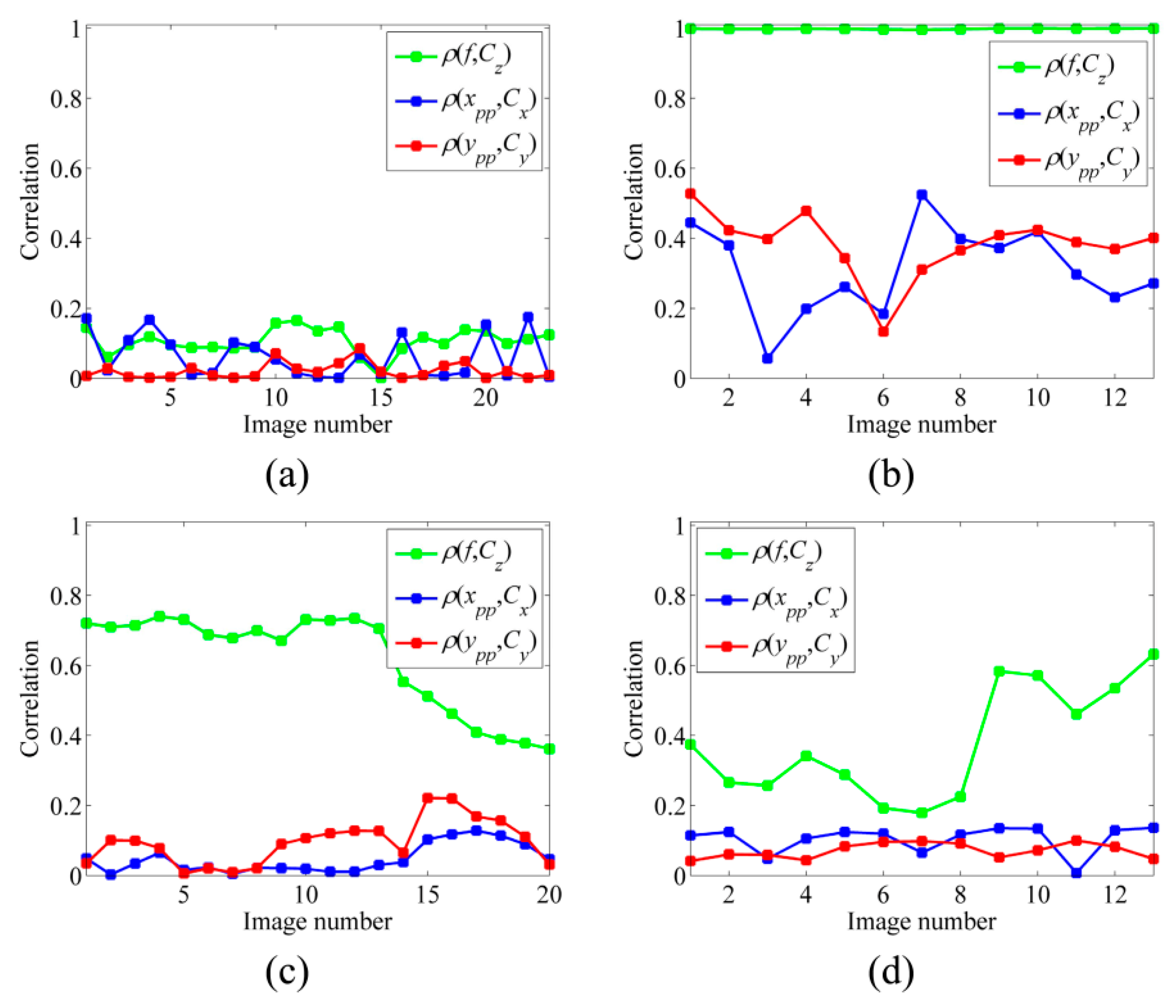
- CalibTest 1: Offline camera calibration was performed using a well-configured imaging network (Figure 15a).
- CalibTest 2: On-the-job calibration was performed using typical aerial images, which were all acquired from almost the same altitude (Figure 15b).
- CalibTest 3: On-the-job calibration was performed using aerial images, which were acquired from varying altitudes (Figure 15c).
7. Results and Discussion
7.1. Calibration Results
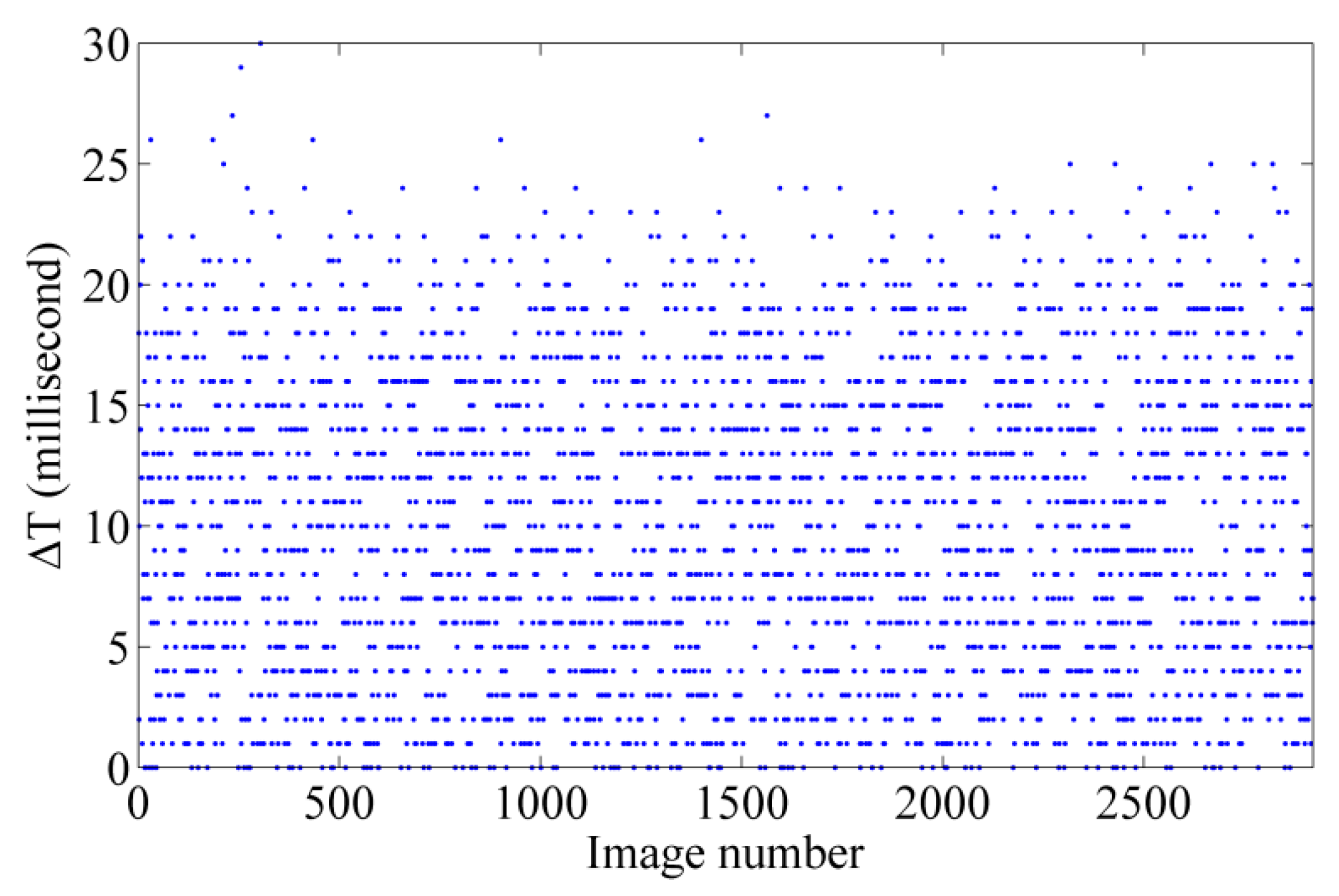
7.2. Precision of Time-Synchronization
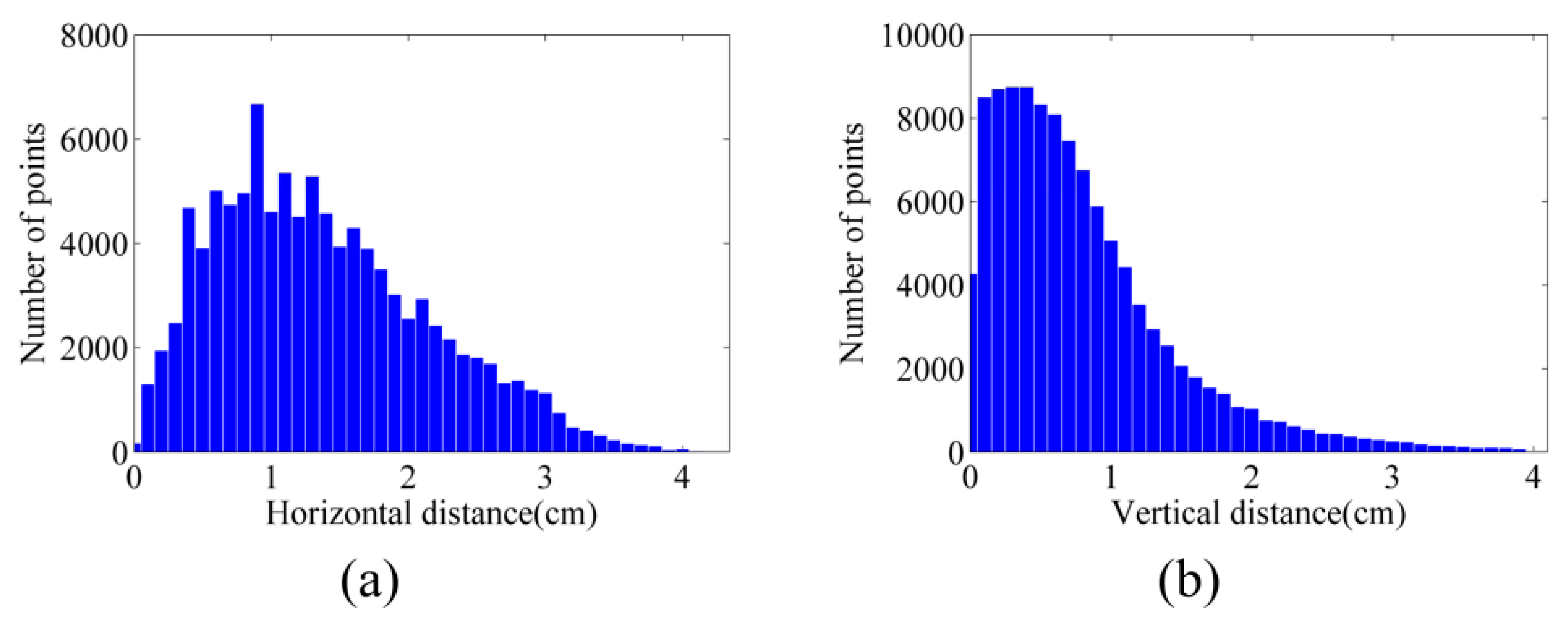
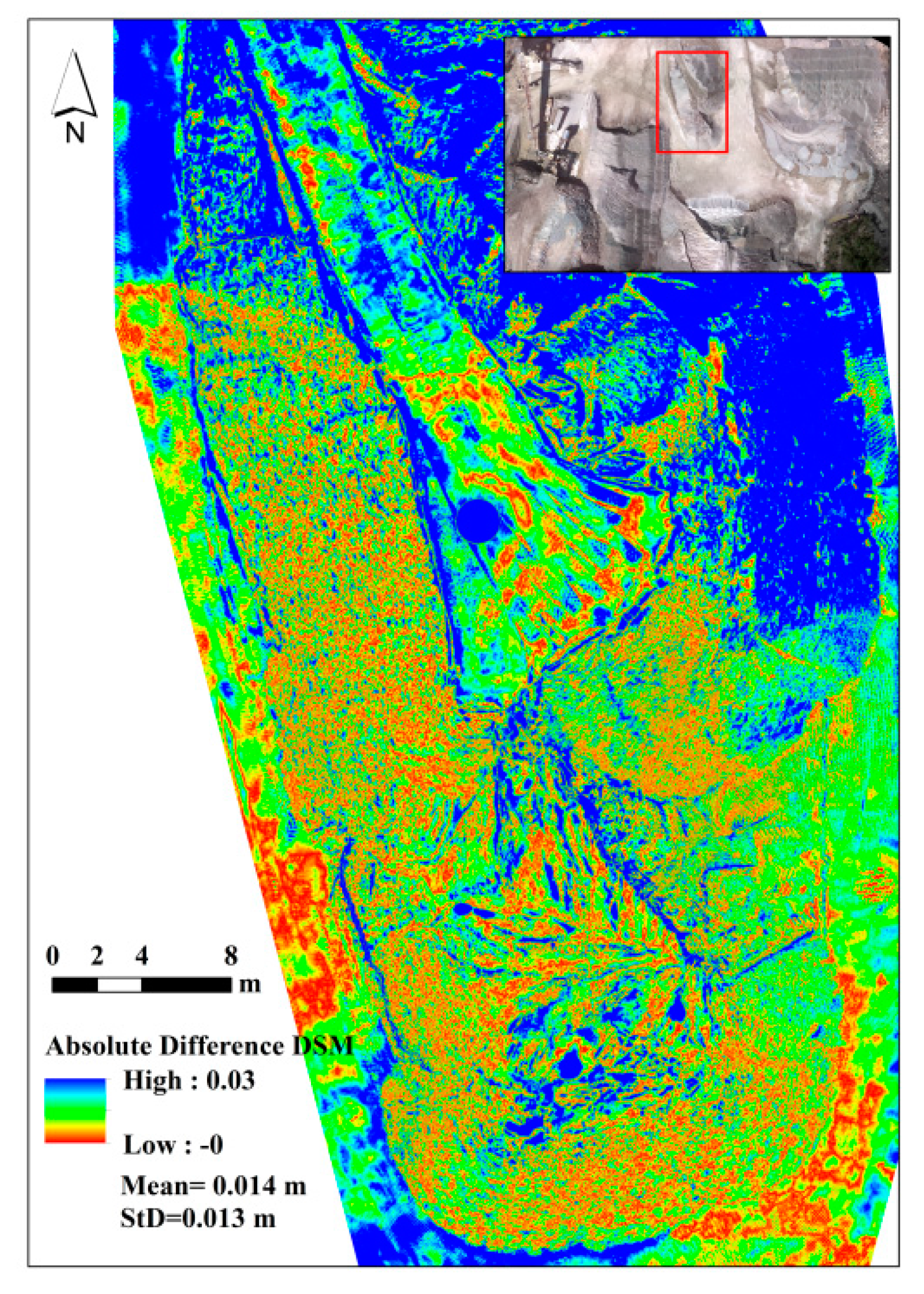
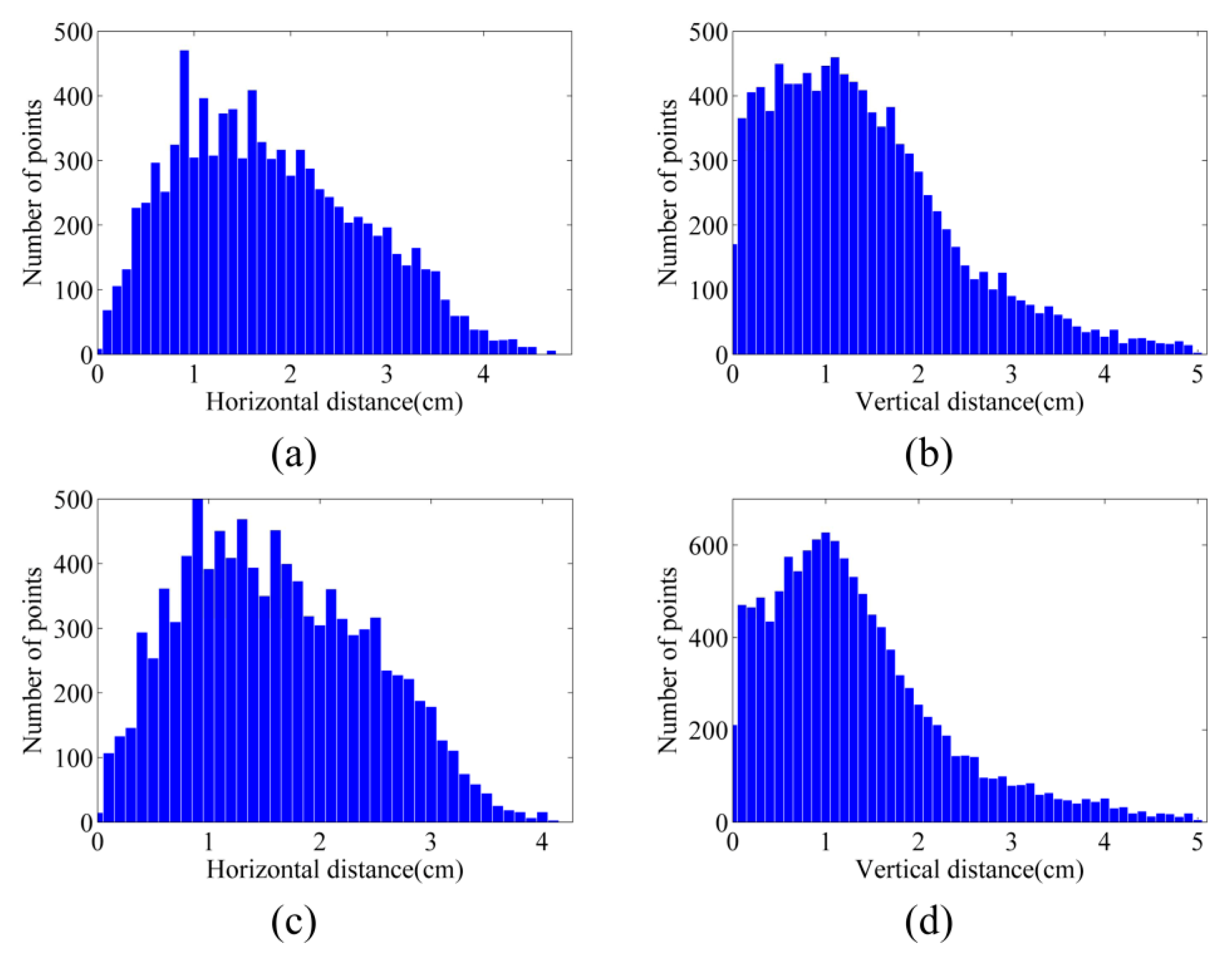
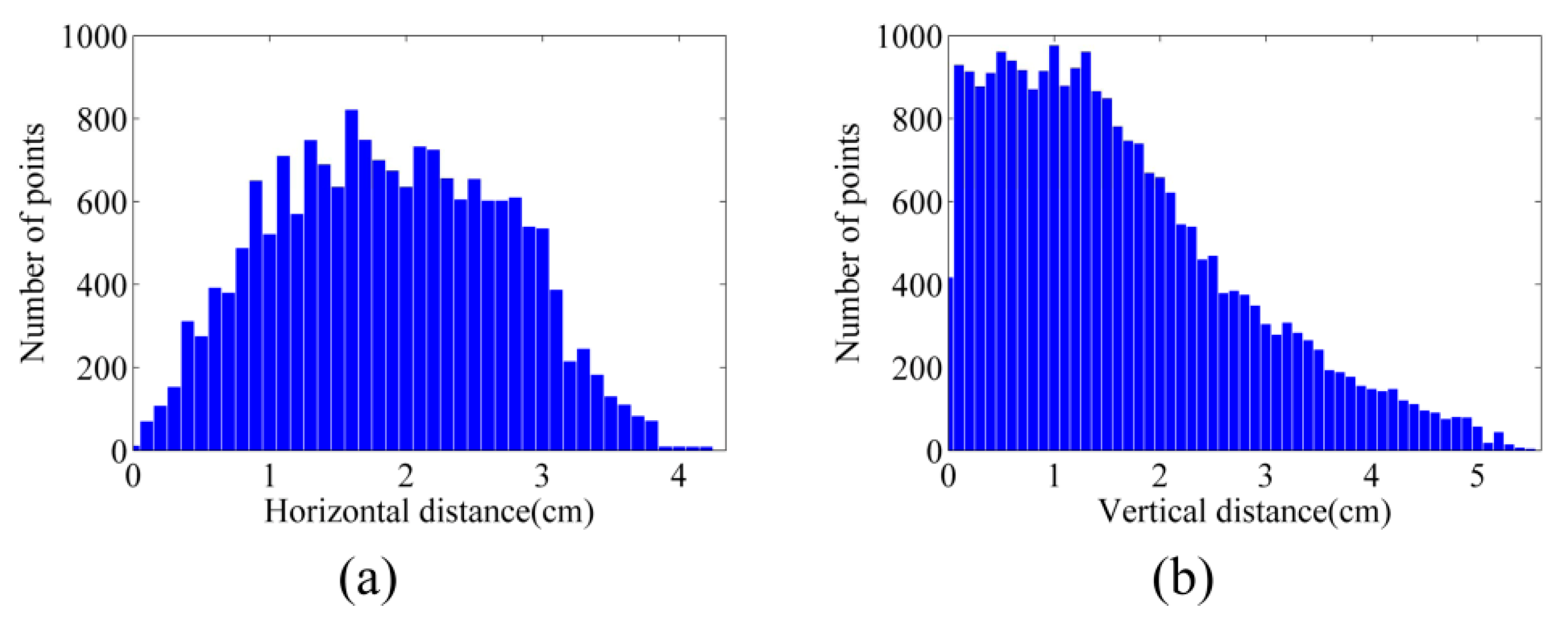
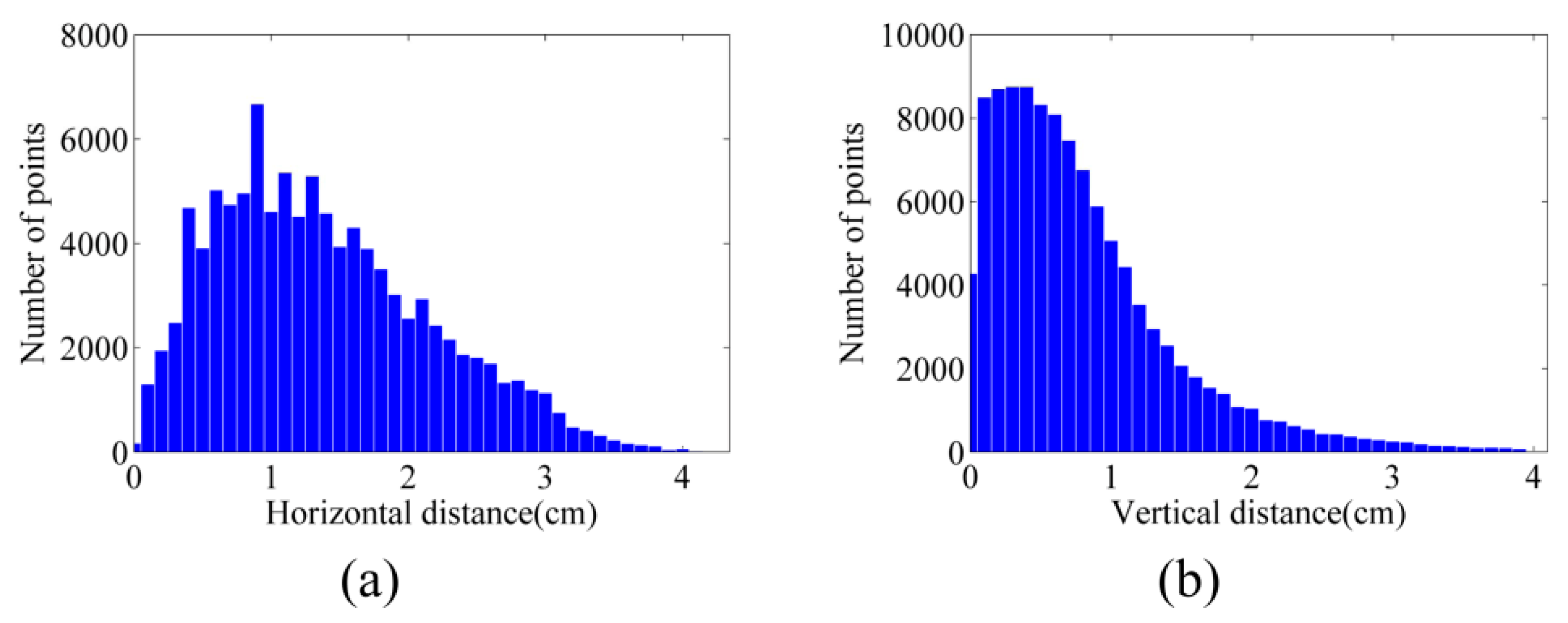
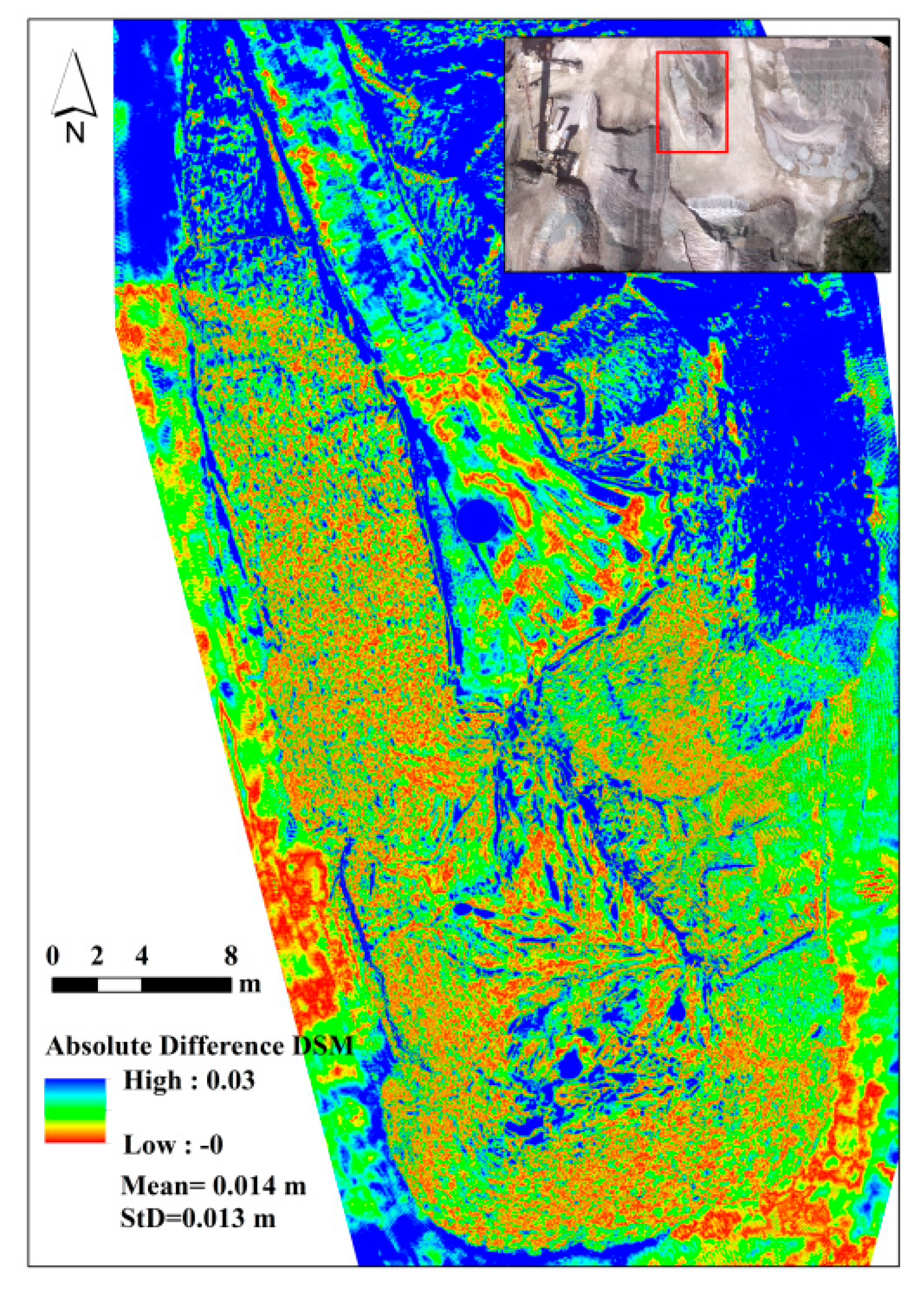
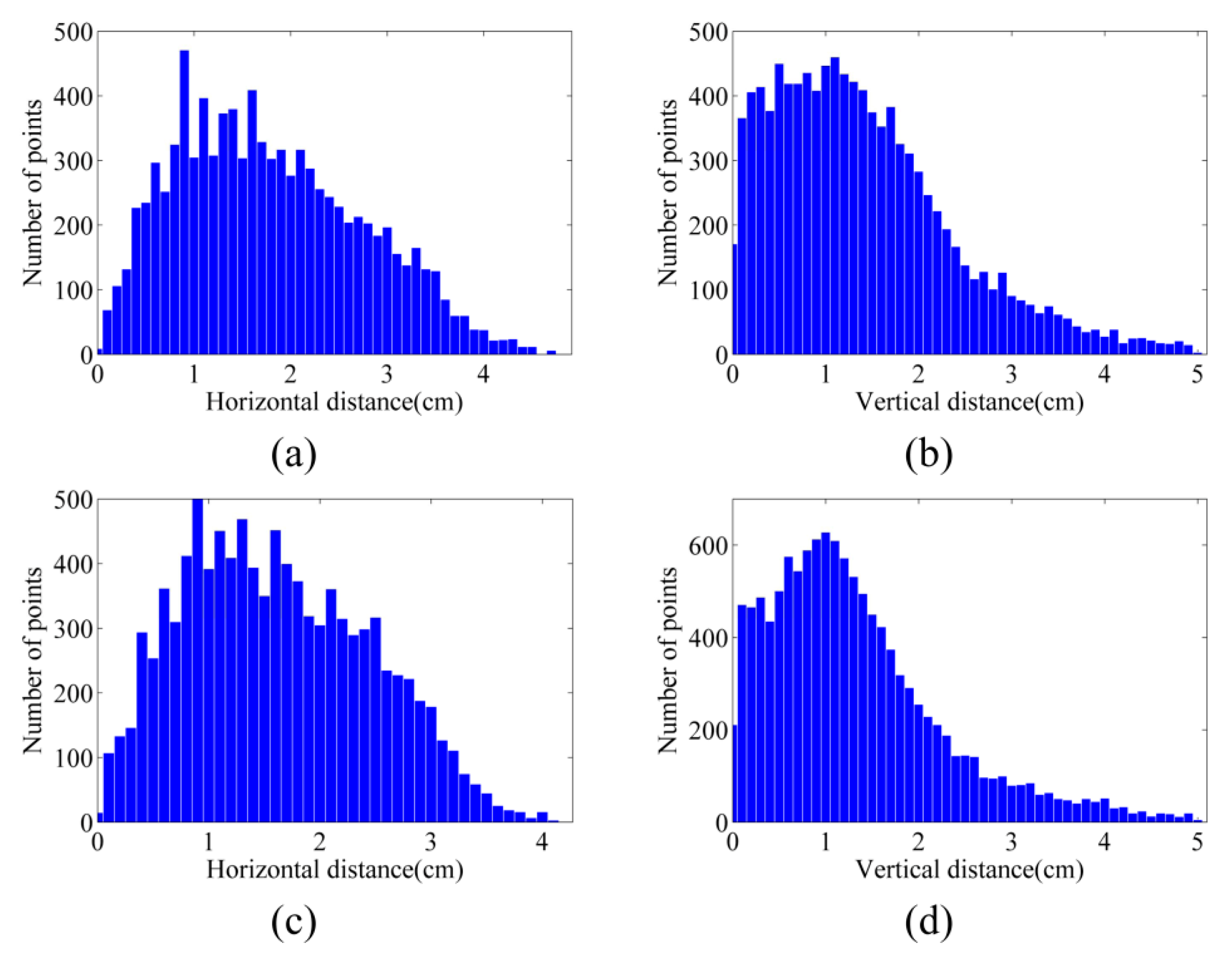
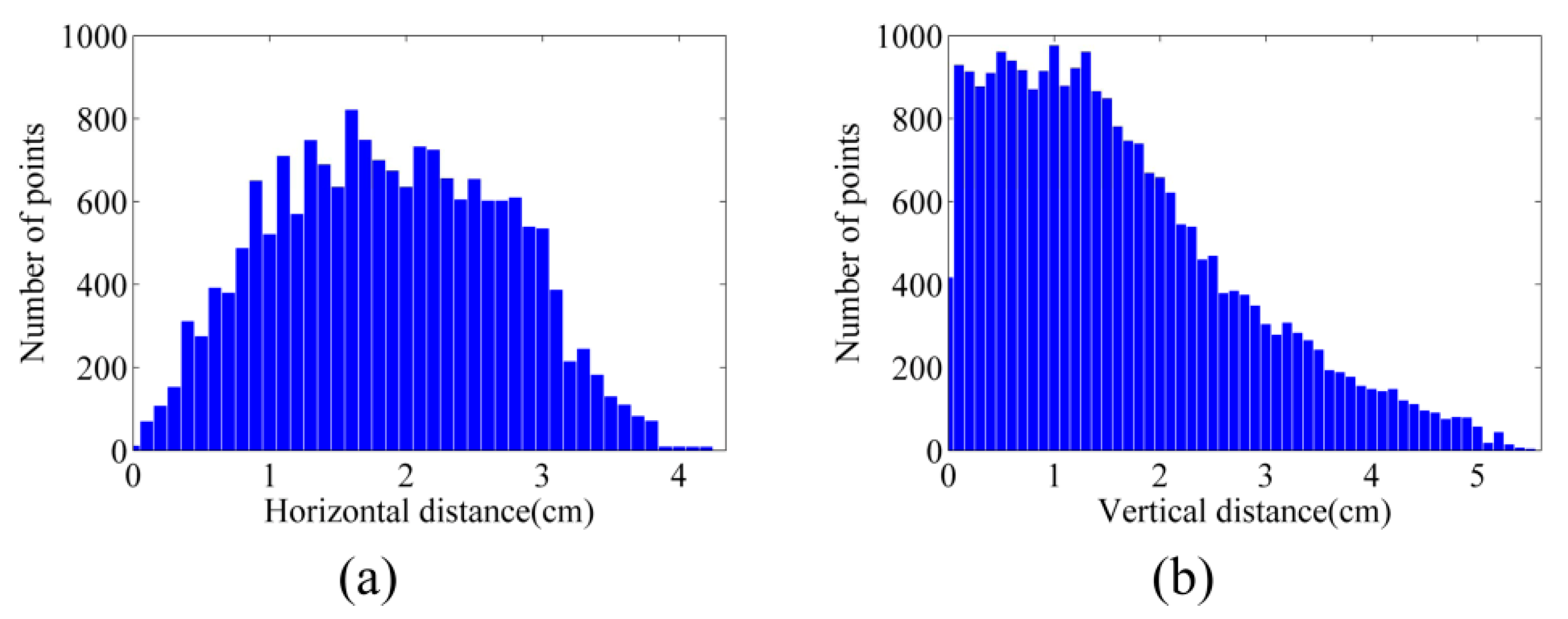
7.3. Accuracy of 3D Point Clouds
| Dataset | Horizontal Distance (cm) | Vertical Distance (cm) | ||||
|---|---|---|---|---|---|---|
| Mean | RMS | StD | Mean | RMS | StD | |
| A | 1.38 | 1.58 | 0.77 | 0.80 | 1.03 | 0.66 |
| B before shadow removal | 1.79 | 2.03 | 0.96 | 1.41 | 1.72 | 0.99 |
| B after shadow removal | 1.62 | 1.82 | 0.83 | 1.32 | 1.62 | 0.95 |
| C | 1.88 | 2.07 | 0.84 | 1.63 | 2.02 | 1.18 |
7.4. Effects of Ground Control Points
| Experiment | X-Direction Error (m) | Y-Direction Error (m) | Vertical Error (m) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMS | StD | Mean | RMS | StD | Mean | RMS | StD | |
| DG type 1 | 1.146 | 1.406 | 0.837 | 2.478 | 3.088 | 1.892 | 10.440 | 11.670 | 5.359 |
| DG type 2 | 1.938 | 1.943 | 0.137 | 1.162 | 1.166 | 0.090 | 3.159 | 3.169 | 0.268 |
| Error | Experiment | Trimble R8 | SXBlue | Garmin GLO | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Mean | RMS | StD | Mean | RMS | StD | Mean | RMS | StD | ||
| Horizontal Error (cm) | GCPTest 1 | 0.2 | 0.4 | 0.3 | 61.9 | 61.9 | 3.0 | 180.0 | 180.7 | 12.4 |
| GCPTest 2 | 0.3 | 0.4 | 0.6 | 68.0 | 69.0 | 1.7 | 158.2 | 160.8 | 19.6 | |
| GCPTest 3 | 0.8 | 0.9 | 1.2 | 73.9 | 74.1 | 4.6 | 216.4 | 216.6 | 9.0 | |
| GCPTest 4 | 0.3 | 0.4 | 0.7 | 63.8 | 62.9 | 2.3 | 160.2 | 165.3 | 30.2 | |
| GCPTest 5 | 0.6 | 0.8 | 0.9 | 74.7 | 76.3 | 14.8 | 227.0 | 228.0 | 20.5 | |
| GCPTest 6 | 0.3 | 0.5 | 0.6 | 72.6 | 72.8 | 5.1 | 189.3 | 193.5 | 31.4 | |
| Vertical Error (cm) | GCPTest 1 | 1.2 | 1.7 | 1.2 | 13.8 | 15.5 | 7.0 | 412.9 | 413.0 | 10.5 |
| GCPTest 2 | 1.6 | 2.0 | 1.2 | 41.1 | 49.7 | 28.3 | 355.5 | 355.8 | 12.4 | |
| GCPTest 3 | 4.1 | 4.3 | 1.4 | 73.6 | 73.6 | 2.8 | 434.9 | 436.0 | 32.5 | |
| GCPTest 4 | 1.4 | 2.0 | 1.4 | 43.2 | 48.5 | 22.1 | 432.1 | 433.5 | 35.2 | |
| GCPTest 5 | 2.4 | 3.0 | 1.8 | 121.6 | 147.1 | 83.6 | 431.2 | 446.1 | 115.6 | |
| GCPTest 6 | 1.4 | 1.9 | 1.4 | 80.2 | 97.4 | 55.7 | 432.1 | 433.5 | 35.2 | |
| Device | Horizontal-Accuracy Percentage Change | Vertical-Accuracy Percentage Change | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Experiment | Experiment | |||||||||||
| 1 * | 2 | 3 | 4 | 5 | 6 | 1 | 2 | 3 | 4 | 5 | 6 | |
| R8 RTK | 99.8 | 99.8 | 99.6 | 99.8 | 99.6 | 99.8 | 99.6 | 99.6 | 99.0 | 99.6 | 99.3 | 99.6 |
| SXBlue | 72.9 | 69.7 | 67.5 | 72.4 | 66.5 | 68.1 | 96.5 | 88.9 | 83.5 | 89.1 | 67.0 | 78.2 |
| Garmin GLO | 20.7 | 29.5 | 5.0 | 27.5 | 0.0 | 15.1 | 7.4 | 20.2 | 2.3 | 2.8 | 0.0 | 2.8 |
7.5. Effects of Imaging Configuration
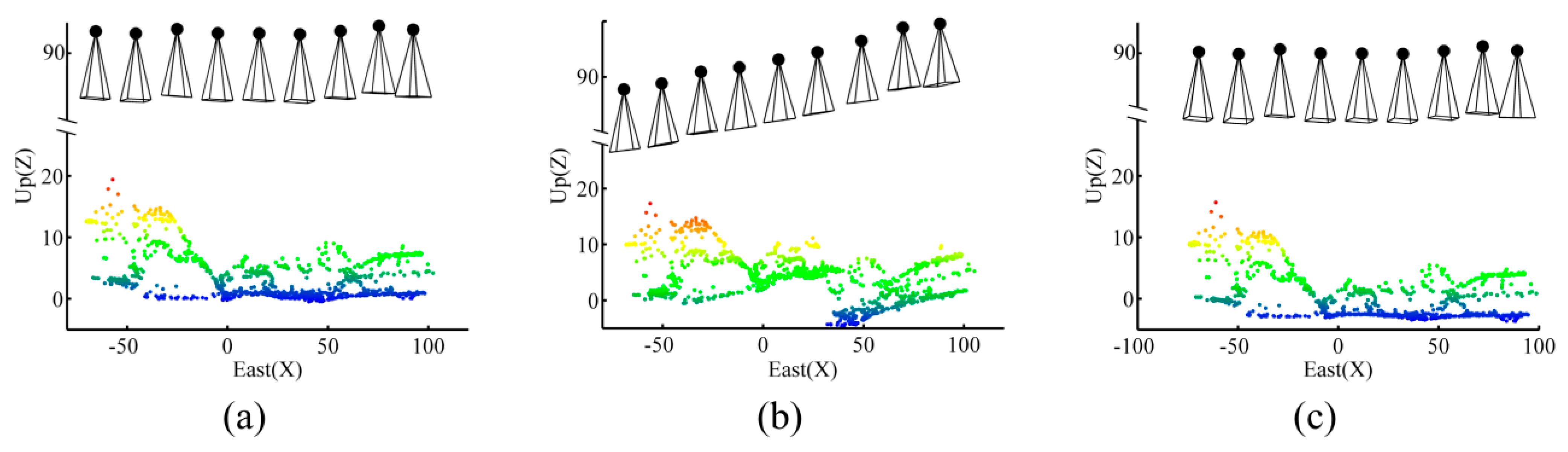
7.6. On-the-job Self-Calibration Results
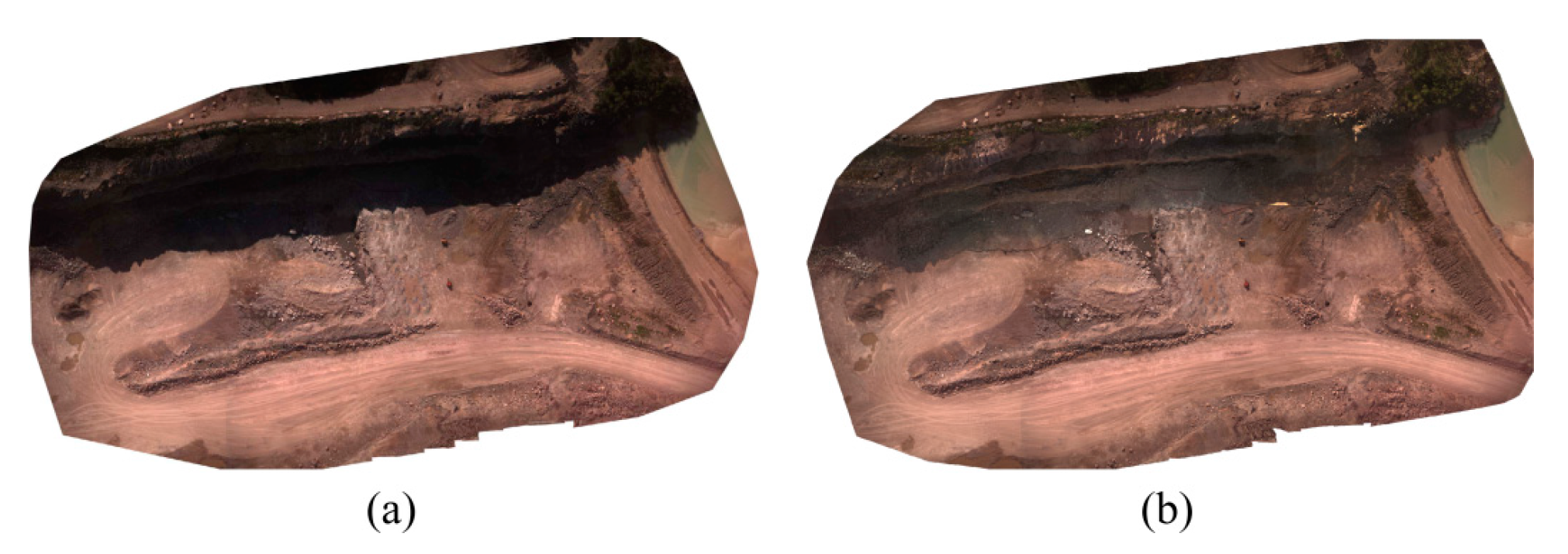
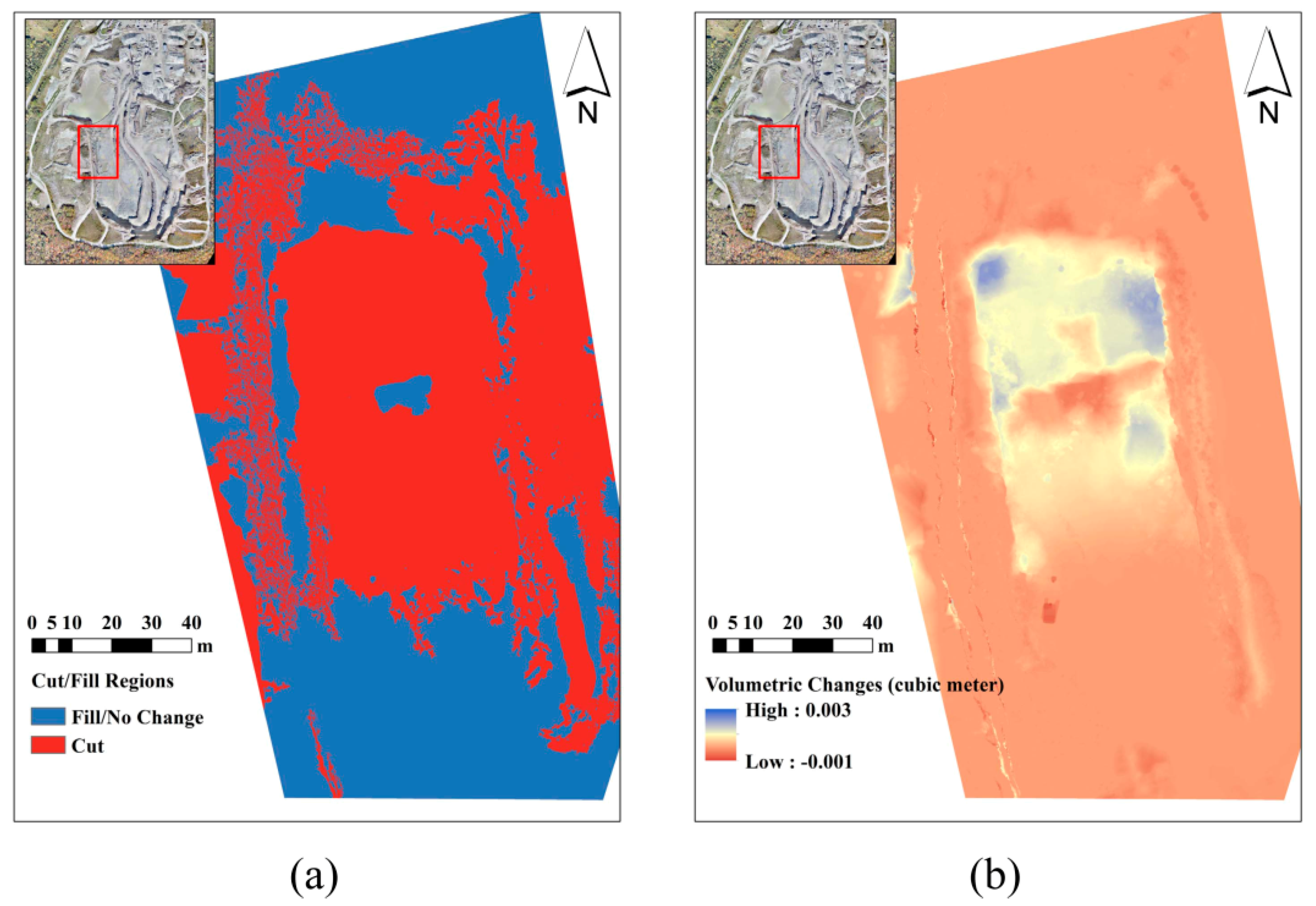
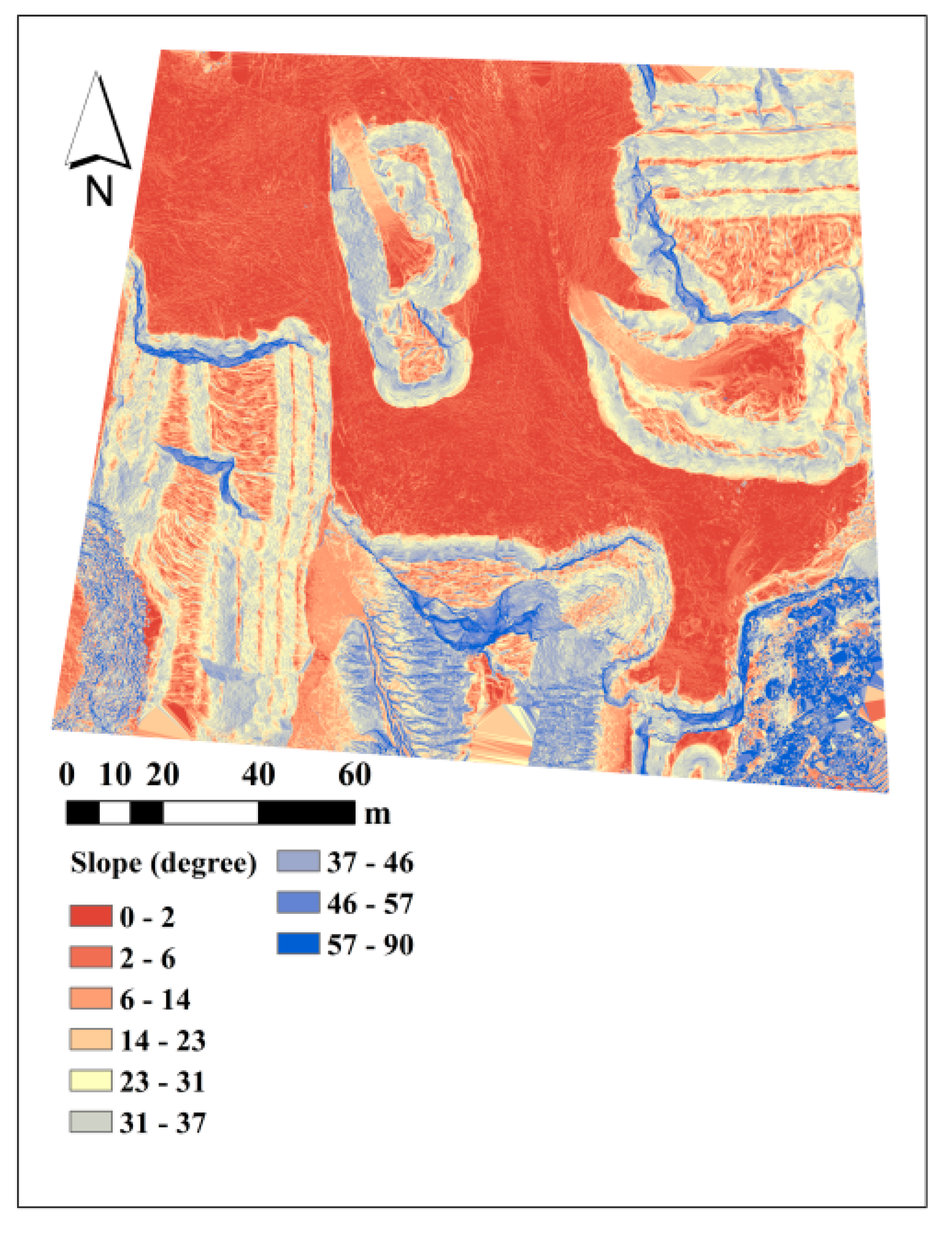
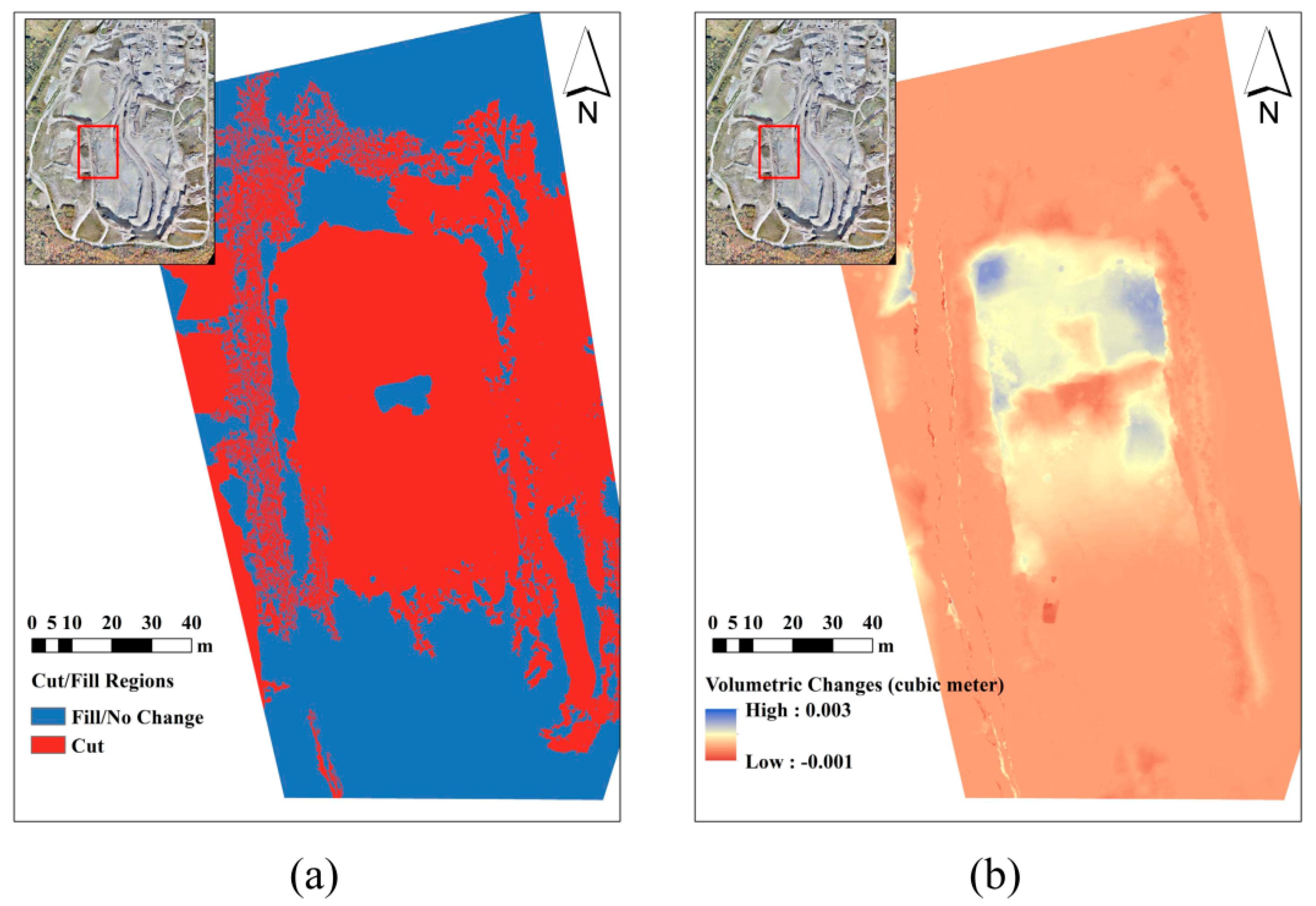
7.7. Application-Dependant Results
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shahbazi, M.; Théau, J.; Ménard, P. Recent applications of unmanned aerial imagery in natural resource management. Gisci. Remote Sens. 2014, 51, 339–365. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Liu, P.; Chen, A.; Huang, Y.; Han, J.; Lai, J.; Kang, S.; Wu, T.; Wen, M.; Tsai, M. A review of rotorcraft unmanned aerial vehicle (UAV) developments and applications in civil engineering. Smart Struct. Syst. 2014, 13, 1065–1094. [Google Scholar] [CrossRef]
- Anai, T.; Sasaki, T.; Osaragi, K.; Yamada, M.; Otomo, F.; Otani, H. Automatic exterior orientation procedure for low-cost UAV photogrammetry using video image tracking technique and GPS information. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012. [Google Scholar] [CrossRef]
- Bahr, T.; Jin, X.; Lasica, R.; Giessel, D. Image registration of high-resolution UAV data: The new hypare algorithm. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013. [Google Scholar] [CrossRef]
- Boccardo, P.; Chiabrando, F.; Dutto, F.; Tonolo, F.G.; Lingua, A. UAV deployment exercise for mapping purposes: Evaluation of emergency response applications. Sensors 2015, 15, 15717–15737. [Google Scholar] [CrossRef] [PubMed]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Xiang, H.; Tian, L. Method for automatic georeferencing aerial remote sensing (RS) images from an unmanned aerial vehicle (UAV) platform. Biosyst. Eng. 2011, 108, 104–113. [Google Scholar] [CrossRef]
- Chiang, K.W.; Tsai, M.L.; Chu, C.H. The development of an UAV borne direct georeferenced photogrammetric platform for ground control point free applications. Sensors 2012, 12, 9161–9180. [Google Scholar] [CrossRef] [PubMed]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution unmanned aerial vehicle (UAV) imagery, based on structure from motion (SfM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Chiang, K.W.; Tsai, M.L.; Naser, E.S.; Habib, A.; Chu, C.H. New calibration method using low cost MEMS IMUs to verify the performance of UAV-borne MMS payloads. Sensors 2015, 15, 6560–6585. [Google Scholar] [CrossRef] [PubMed]
- Ai, M.; Hu, Q.; Li, J.; Wang, M.; Yuan, H.; Wang, S. A robust photogrammetric processing method of low-altitude UAV images. Remote Sens. 2015, 7, 2302–2333. [Google Scholar] [CrossRef]
- Wu, C.T.; Hsiao, C.Y.; Chen, C.S. An assessment of errors using unconventional photogrammetric measurement technology with UAV photographic images as an example. J. Appl. Sci. Eng. 2013, 16, 105–116. [Google Scholar]
- Remondino, F.; Fraser, C. Digital cameras calibration methods: Considerations and comparisons. In Proceedings of the ISPRS Commission V Symposium on Image Engineering and Vision Metrology, Dresden, Germany, 19 September 2006; pp. 266–272.
- Rieke-Zapp, D.; Tecklenburg, W.; Peipe, J.; Hastedt, H.; Haig, C. Evaluation of the geometric stability and the accuracy potential of digital cameras-comparing mechanical stabilisation versus parameterisation. ISPRS J. Photogramm. 2009, 64, 248–258. [Google Scholar] [CrossRef]
- Yang, Y. Robust estimation for dependent observation. Manuscr. Geod. 1994, 19, 10–17. [Google Scholar]
- Zhang, Y.; Xiong, J.; Hao, L. Photogrammetric processing of low-altitude images acquired by unpiloted aerial vehicles. Photogramm. Rec. 2011, 26, 190–211. [Google Scholar] [CrossRef]
- Ivory, J. An Evaluation of Photogrammetry as a Geotechnical Risk Management Tool for Open-Pit Mine Studies and for the Development of Discrete Fracture Network Models. Master’s Thesis, UCL Australia, Adelaide, SA, Australia, 2012. [Google Scholar]
- Patikova, A. Digital photogrammetry in the practice of open pit mining. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 34, 1–4. [Google Scholar]
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Bemis, S.P.; Micklethwaite, S.; Turner, D.; James, M.R.; Akciz, S.; Thiele, S.T.; Bangash, H.A. Ground-based and UAV-based photogrammetry: A multi-scale, high-resolution mapping tool for structural geology and paleoseismology. J. Struct. Geol. 2014, 69, 163–178. [Google Scholar] [CrossRef]
- Cryderman, C.; Mah, S.B.; Shufletoski, A. Evaluation of UAV photogrammetric accuracy for mapping and earthworks computations. Geomatica 2014, 68, 309–317. [Google Scholar] [CrossRef]
- Holst, G.C.; Lomheim, T.S. CMOS/CCD Sensors and Camera Systems, 2nd ed.; JCD Publishing: Winter Park, FL, USA, 2007. [Google Scholar]
- Luhmann, T.; Robson, S.; Kyle, S.; Harley, I. Close Range Photogrammetry: Principles, Techniques and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Brown, D.C. Close-range camera calibration. Photogramm. Eng. 1971, 37, 855–866. [Google Scholar]
- Dörstel, C.; Jacobsen, K.; Stallmann, D. DMC—Photogrammetric Accuracy—Calibration Aspects and Generation of Synthetic DMC Images. In Proceedings of Optical 3D Sensor Workshop, Zurich, Switzerland, 6 September 2003; pp. 4–12.
- Grewal, M.S.; Weill, L.R.; Andrews, A.P. Global Positioning Systems, Inertial Navigation, and Integration, 2nd ed.; John Wiley & Sons Publication: Hoboken, NJ, USA, 2007. [Google Scholar]
- Honkavaara, E.; Hakala, T.; Markelin, L.; Rosnell, T.; Saari, H.; Makynen, J. A process for radiometric correction of UAV image blocks. Photogramm. Fernerkund. 2012, 2, 115–127. [Google Scholar] [CrossRef]
- Mukherjee, D.; Wu, Q.J.; Wang, G. A comparative experimental study of image feature detectors and descriptors. Mach. Vis. Appl. 2015, 26, 443–466. [Google Scholar] [CrossRef]
- Hirschmüller, H.; Scharstein, D. Evaluation of stereo matching costs on images with radiometric differences. IEEE Trans. Pattern Anal. 2009, 31, 1582–1599. [Google Scholar] [CrossRef] [PubMed]
- Jung, I.L.; Chung, T.Y.; Sim, J.Y.; Kim, C.S. Consistent stereo matching under varying radiometric conditions. IEEE Trans. Multimed. 2013, 15, 56–69. [Google Scholar] [CrossRef]
- Adeline, K.R.M.; Chen, M.; Briottet, X.; Pang, S.K.; Paparoditis, N. Shadow detection in very high spatial resolution aerial images: A comparative study. ISPRS J. Photogramm. 2013, 80, 21–38. [Google Scholar] [CrossRef]
- Sona, G.; Pinto, L.; Pagliari, D.; Passoni, D.; Gini, R. Experimental analysis of different software packages for orientation and digital surface modelling from UAV images. Earth Sci. Inform. 2014, 7, 97–107. [Google Scholar] [CrossRef]
- Chung, K.L.; Lin, Y.R.; Huang, Y.H. Efficient shadow detection of color aerial images based on successive thresholding scheme. IEEE Trans. Geosci. Remote Sense. 2009, 47, 671–682. [Google Scholar] [CrossRef]
- Rumpler, M.; Daftry, S.; Tscharf, A.; Prettenthaler, R.; Hoppe, C.; Mayer, G.; Bischof, H. Automated end-to-end workflow for precise and geo-accurate reconstructions using fiducial markers. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014. [Google Scholar] [CrossRef]
- Pix4D, UAV Mapping Software. Available online: https://pix4d.com (accessed on 10 August 2015).
- Wolf, P.R.; Dewitt, B.A. Elements of Photogrammetry: With Applications in GIS, 3rd ed.; The McGraw-Hill Companies: Boston, MA, USA, 2000. [Google Scholar]
- Vanicek, P.; Krakiwsky, E.J. Geodesy: The Concepts, 2nd ed.; Elsevier Science Publishers: New York, NY, USA, 1986; pp. 242–283. [Google Scholar]
- CloudCompare-Open Source project. Available online: http://www.danielgm.net/cc (accessed on 10 August 2015).
- Bay, H.; Ess, A.; Tuytelaars, T.; van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahbazi, M.; Sohn, G.; Théau, J.; Menard, P. Development and Evaluation of a UAV-Photogrammetry System for Precise 3D Environmental Modeling. Sensors 2015, 15, 27493-27524. https://doi.org/10.3390/s151127493
Shahbazi M, Sohn G, Théau J, Menard P. Development and Evaluation of a UAV-Photogrammetry System for Precise 3D Environmental Modeling. Sensors. 2015; 15(11):27493-27524. https://doi.org/10.3390/s151127493
Chicago/Turabian StyleShahbazi, Mozhdeh, Gunho Sohn, Jérôme Théau, and Patrick Menard. 2015. "Development and Evaluation of a UAV-Photogrammetry System for Precise 3D Environmental Modeling" Sensors 15, no. 11: 27493-27524. https://doi.org/10.3390/s151127493
APA StyleShahbazi, M., Sohn, G., Théau, J., & Menard, P. (2015). Development and Evaluation of a UAV-Photogrammetry System for Precise 3D Environmental Modeling. Sensors, 15(11), 27493-27524. https://doi.org/10.3390/s151127493