Sensor Data Fusion for Accurate Cloud Presence Prediction Using Dempster-Shafer Evidence Theory


Abstract
:1. Introduction
2. Dempster-Shafer Data Fusion Theory
2.1. Prior Requirements for Dempster-Shafer Theory
2.2. Rules for the Combination of Evidence—Dempster’s Rule
2.3. Support and Plausibility
3. Cloud Presence Prediction Using Dempster-Shafer Evidence Theory
3.1. Basic Probability Assignment
Cloud mass
Sunshine mass
Unknown mass
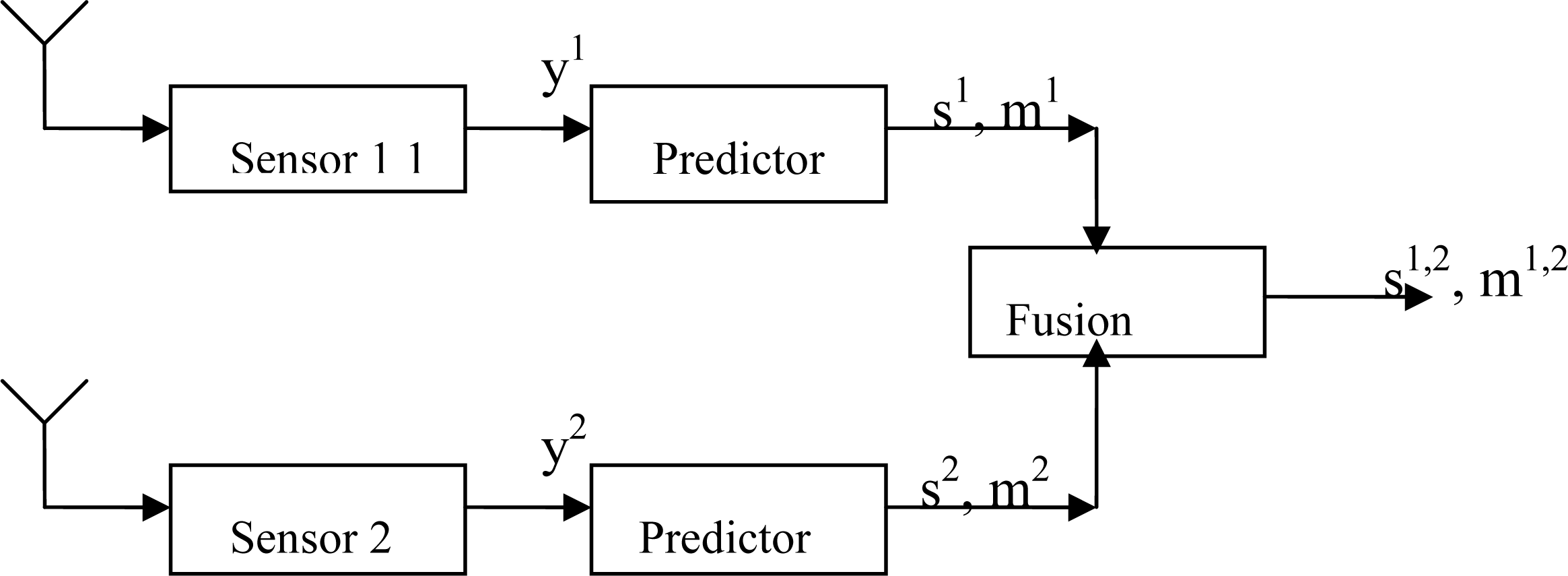
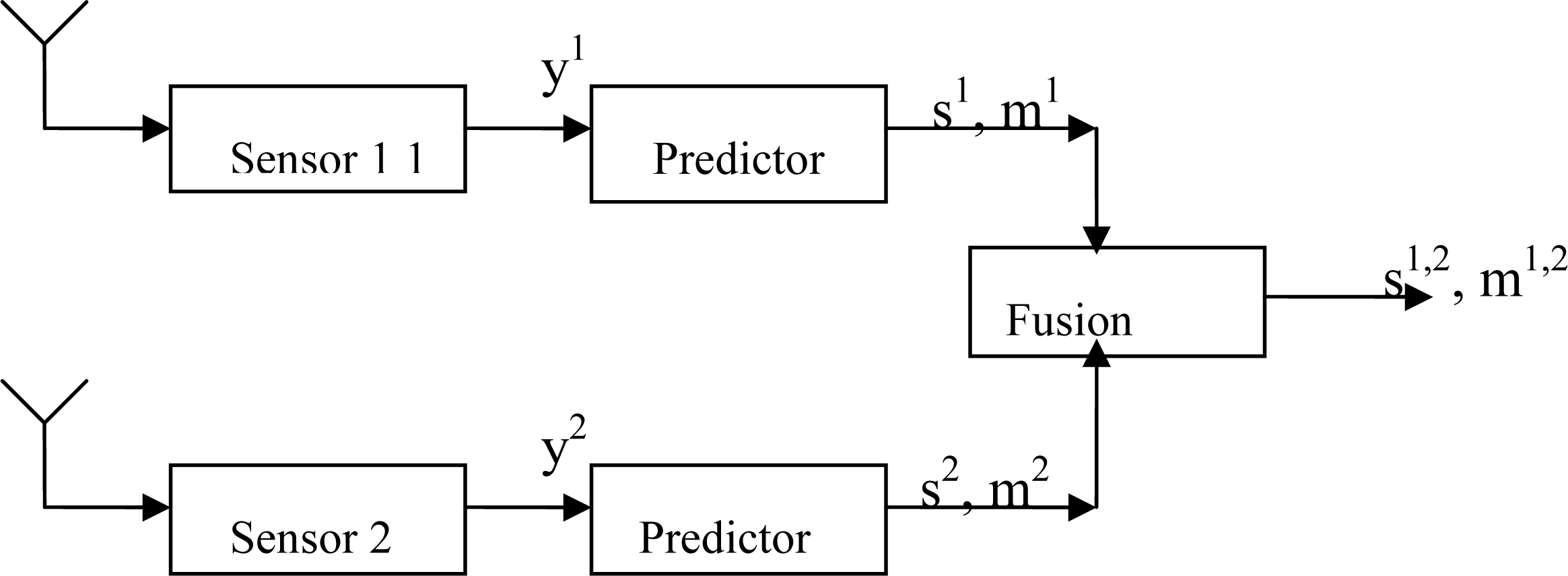
3.2. System Diagram of Dempster-Shafer Data Fusion for Cloud Presence Prediction
4. Experiments and Results
4.1. Cloud Presence Predictor
Predictor 1
Predictor 2
Predictor 3
4.2. Learning of Basic Belief Mass
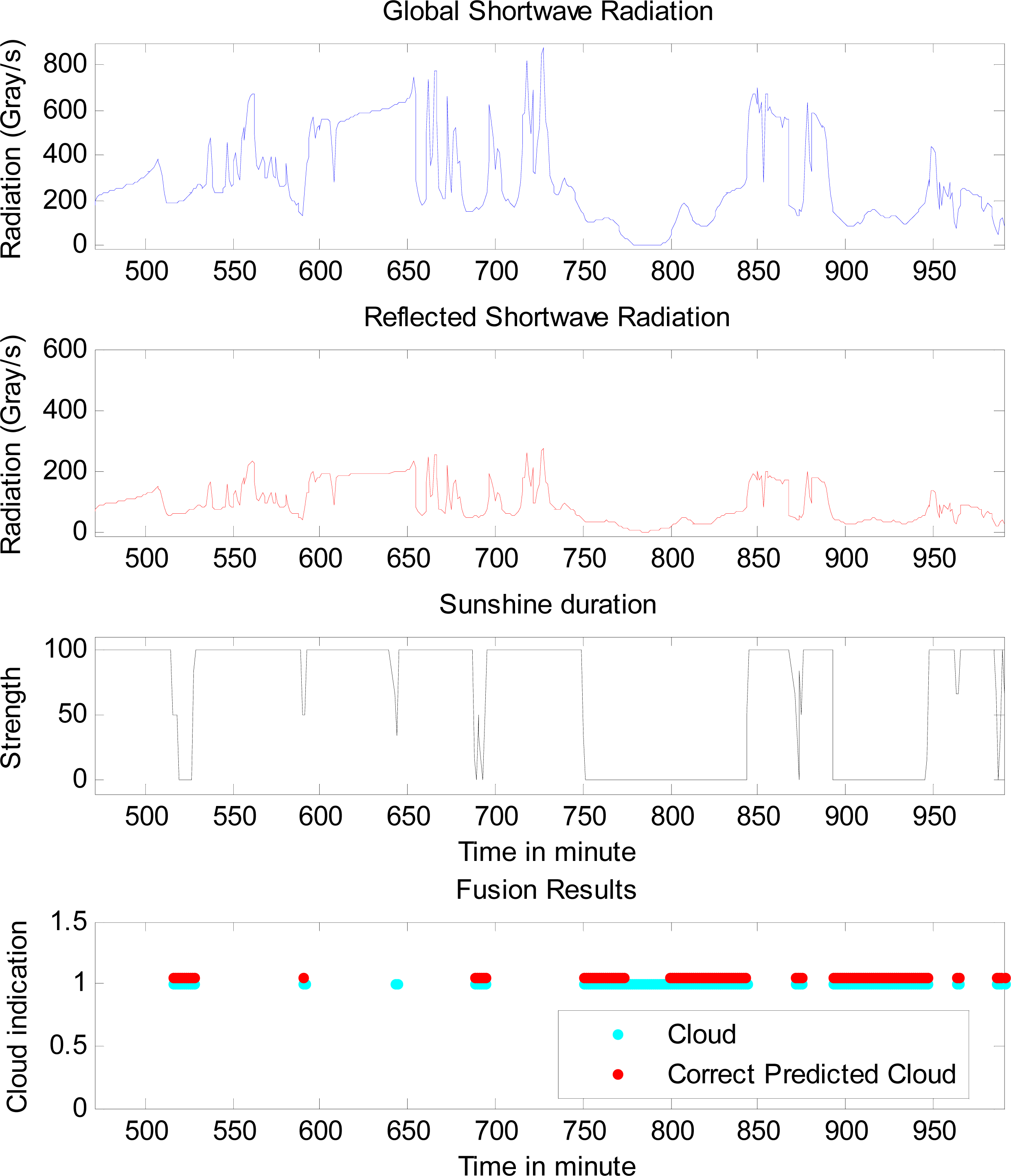
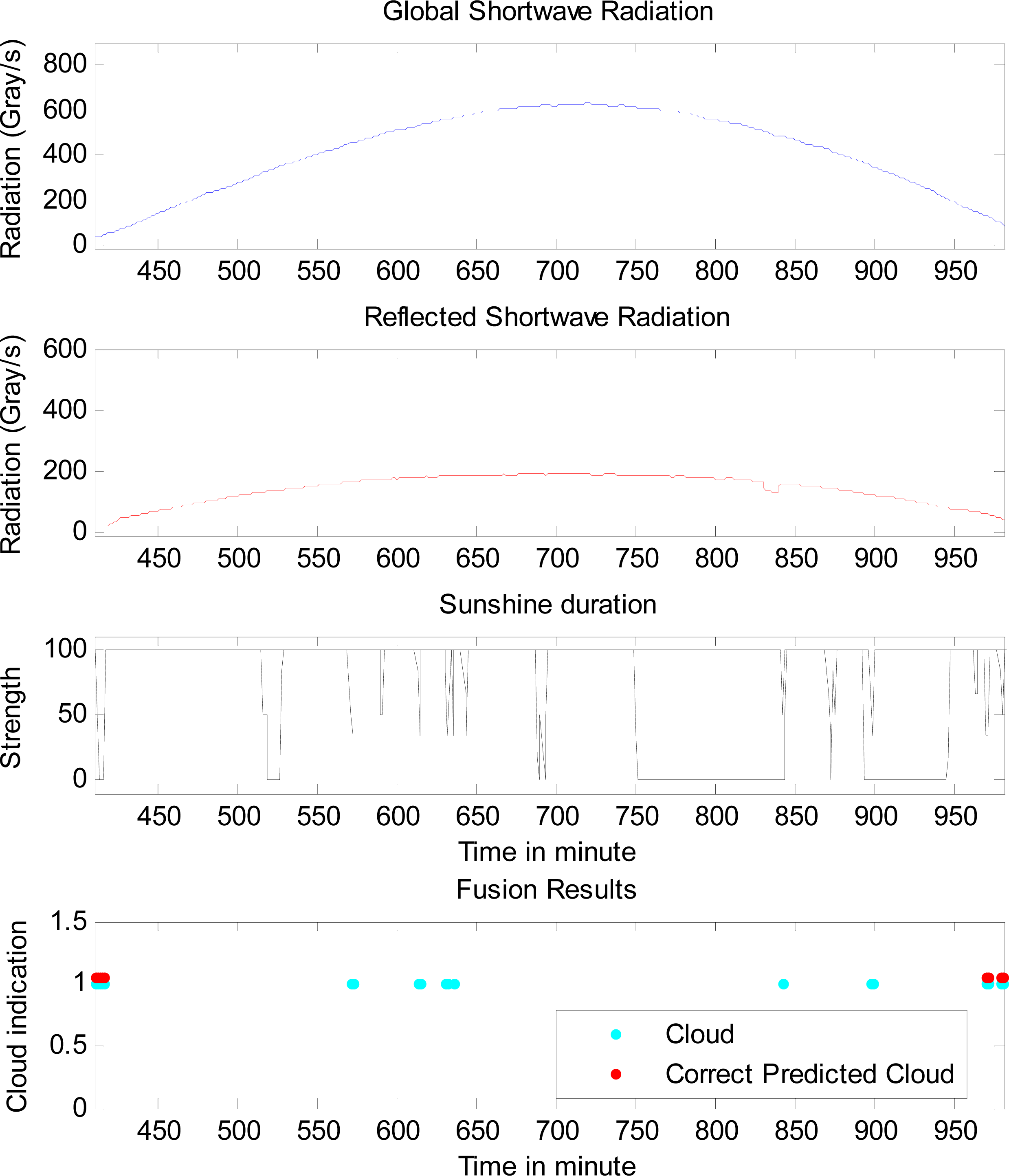
4.3. Dempster-Shafer Fusion
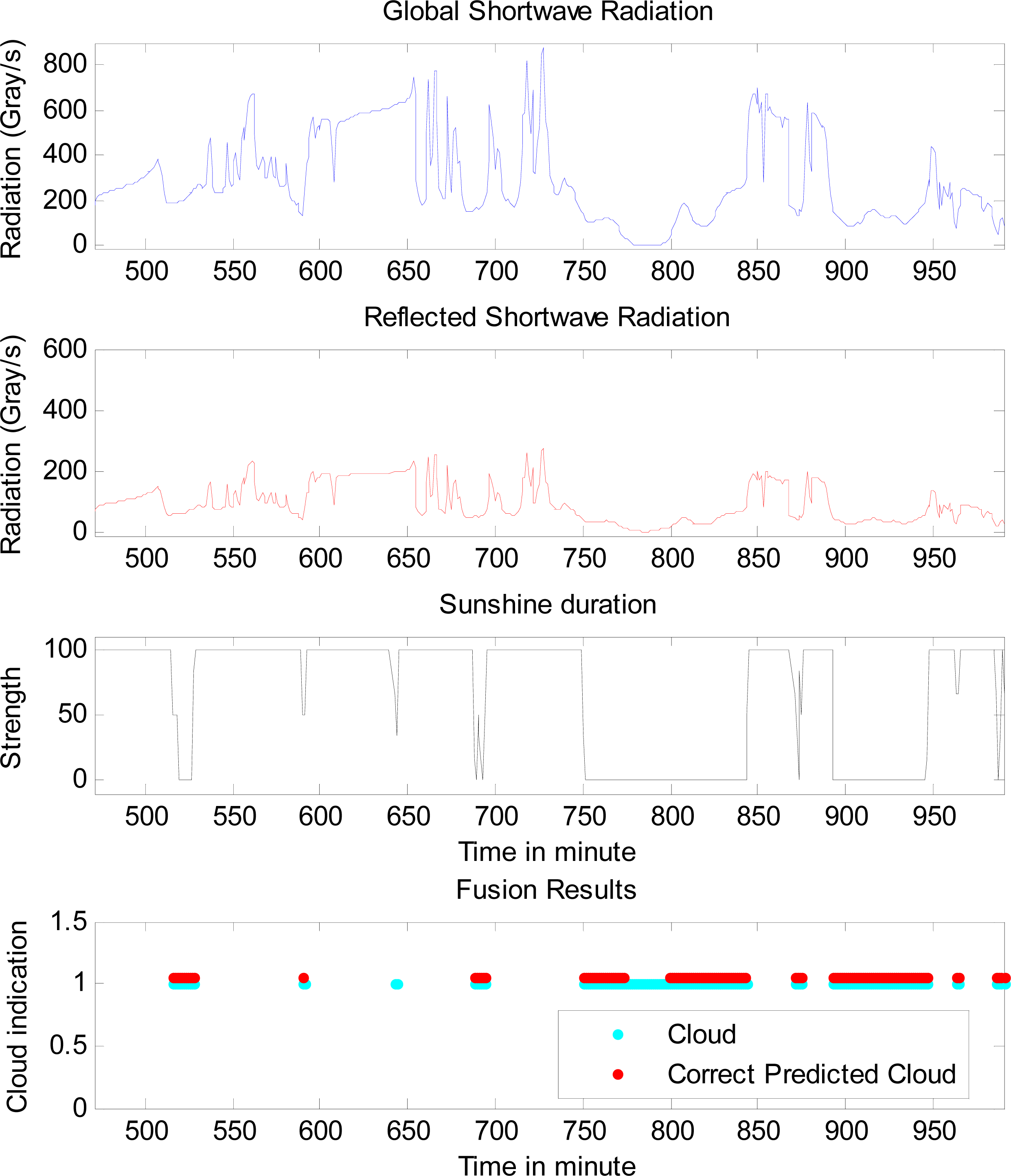
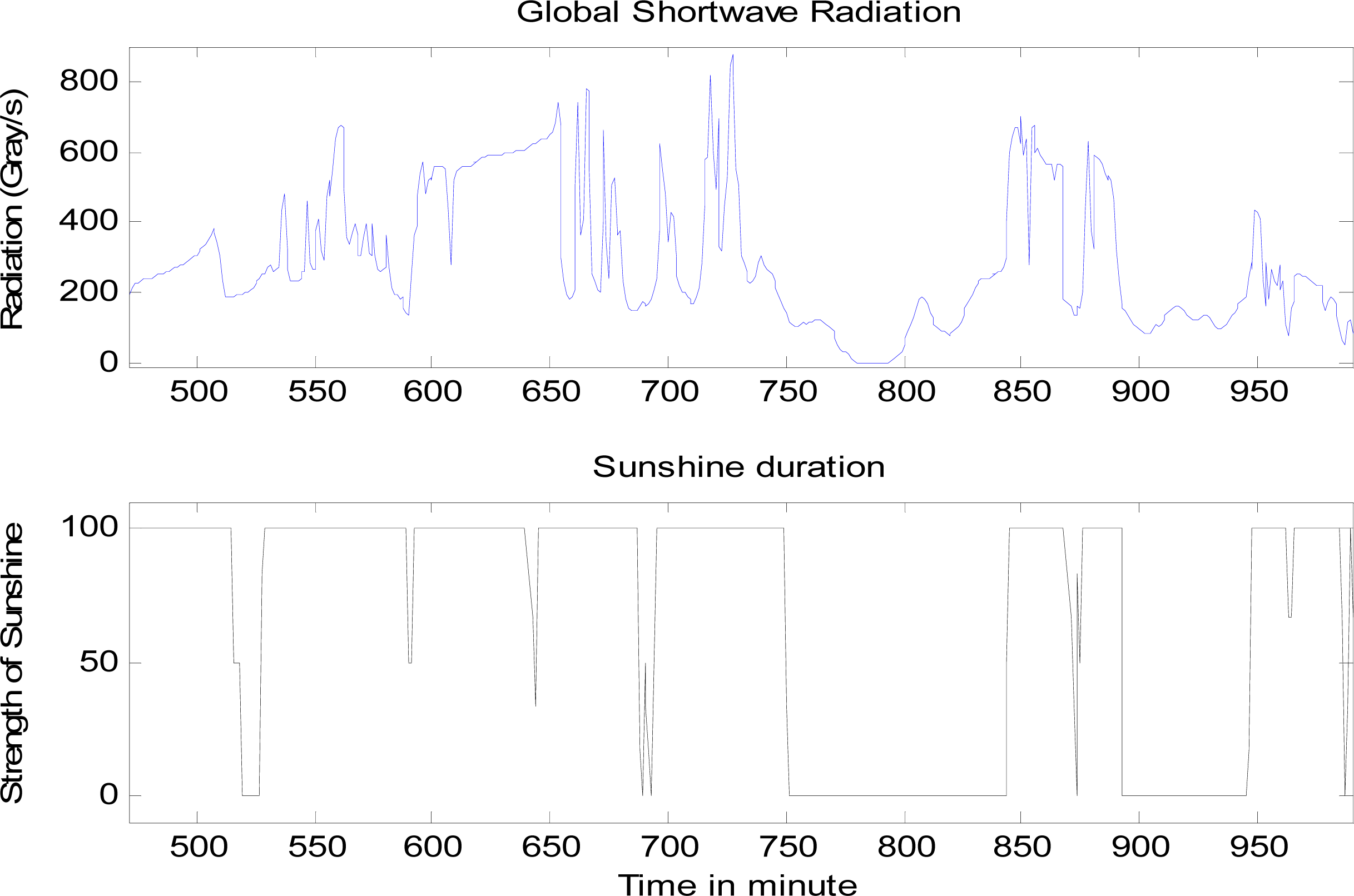
4.4. Results of Dempster-Shafer Fusion
5. Conclusions
References
- Lawrence, AK. Sensor and Data Fusion: A Tool for Information Assessment and Decision Making; SPIE: Lake Buena Vista, FL, USA, July 2004; Volume PM138. [Google Scholar]
- Zou, Y; Ho, YK; Chua, CS; Zhou, XW. Multi-ultrasonic sensor fusion for mobile robots. Proceedings of the IEEE Intelligent Vehicles Symposium 2000, Dearborn, MI, USA, October 3–5, 2000.
- Dempster, AP. Upper and lower probabilities induced by a multivalued mapping. Ann. Math. Statist 1967, 38, 325–339. [Google Scholar]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton and London, UK, 1976. [Google Scholar]
- Platt, G; Guo, Y; Li, JM; West, S. The virtual power station. Proceedings of IEEE International Conference on Sustainable Energy Technologies, ICSET2008, Singapore, November 24–27, 2008.
- Zeller, C; Frohlich, H; Tresch, A. A bayesian network view on nested effects models. EURASIP J. Bioinformatics Syst. Bio 2009, 2009, 9–9. [Google Scholar]
- de Campos, CP; Zeng, Z; Ji, Q. Structure learning of bayesian networks using constraints. Proceedings of the 26th International Conference on Machine Learning, Montreal, QC, Canada, June 14–18, 2009.
- Zhang, DQ; Cao, JN; Zhou, JY; Guo, MY. Extended dempster-shafer theory in context reasoning for ubiquitous computing environments. Proceedings of International Conference on Computational Science and Engineering 2009, Vancouver, BC, Canada, August 29–31, 2009; pp. 205–212.
- Valente, F; Hermansky, H. Combination of acoustic classifiers based on dempster-shafer theory of evidence. Proceedings of International Conference on Acoustics, Speech and Signal Processing (ICASSP), Honolulu, HI, USA, April 15–20, 2007.
- Automatic Weather Station. Available online: http://aws.mq.edu.au/ (accessed on 15 September 2010).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor 1 | {c} = 0.2 | {s} = 0.6 | {u} = 0.2 |
| Sensor 2 | |||
| {c} = 0.5 | {c} = 0.1 | {Φ} = 0.3 | {c} = 0.1 |
| {s} = 0.4 | {Φ} = 0.08 | {s}= 0.24 | {s} = 0.08 |
| {u} = 0.1 | {c} = 0.02 | {s} = 0.06 | {u} = 0.02 |
| Date | Predictor 1 | Predictor 2 | Predictor 3 | |||
|---|---|---|---|---|---|---|
| Sensor 1 | Sensor 2 | Sensor 1 | Sensor 2 | Sensor 1 | Sensor 2 | |
| Cc &U (%) | Cc & U (%) | Cc & U (%) | Cc & U (%) | Cc & U (%) | Cc & U (%) | |
| 13th | 37.8 & 58.4 | 38 & 58 | 39.2 & 55.1 | 39.4 & 54.5 | 39.8 & 53.7 | 40.1 & 52.9 |
| 14th | 61.2 & 36.6 | 61.2 & 36.6 | 62.5 & 34.7 | 62.5 & 34.7 | 62.4 & 35 | 62.4 & 35 |
| 28th | 32.7& 56.7 | 34.5 & 52.3 | 35.3 & 50.5 | 37.6 & 45.7 | 35.4 & 49.7 | 38 & 44.6 |
| 29th | 4.4 & 47.6 | 5.8 & 36 | 4.4 & 47.2 | 5.9 & 35.3 | 4.4 & 47.3 | 5.9 & 35.3 |
| Date | Fusion | ||
|---|---|---|---|
| Predictor 1 | Predictor 2 | Predictor 3 | |
| Cc(%) & U(%) | Cc(%) & U(%) | Cc(%) & U(%) | |
| 13th | 47.5 & 38.7 | 53.3 & 31.9 | 53.9 & 31.1 |
| 14th | 71.2 & 23.7 | 72.1 & 22.6 | 72.3 & 22.9 |
| 28th | 49.4 & 28.2 | 55 & 23.4 | 56.1 & 22.7 |
| 29th | 8 & 20.1 | 8.8 & 18.3 | 10 & 17.6 |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Li, J.; Luo, S.; Jin, J.S. Sensor Data Fusion for Accurate Cloud Presence Prediction Using Dempster-Shafer Evidence Theory. Sensors 2010, 10, 9384-9396. https://doi.org/10.3390/s101009384
Li J, Luo S, Jin JS. Sensor Data Fusion for Accurate Cloud Presence Prediction Using Dempster-Shafer Evidence Theory. Sensors. 2010; 10(10):9384-9396. https://doi.org/10.3390/s101009384
Chicago/Turabian StyleLi, Jiaming, Suhuai Luo, and Jesse S. Jin. 2010. "Sensor Data Fusion for Accurate Cloud Presence Prediction Using Dempster-Shafer Evidence Theory" Sensors 10, no. 10: 9384-9396. https://doi.org/10.3390/s101009384
APA StyleLi, J., Luo, S., & Jin, J. S. (2010). Sensor Data Fusion for Accurate Cloud Presence Prediction Using Dempster-Shafer Evidence Theory. Sensors, 10(10), 9384-9396. https://doi.org/10.3390/s101009384