4.1. AC Reinforcement Learning Algorithm for Optimal Physical Charging Scheme
The idea of reinforcement learning (RL) algorithm is to give a reward function, and maximize the sum of rewards in the future by repeatedly testing and learning strategies in the simulated environment or the real world. Then, the learning strategies are compared with the optimization problems of each step to get real-time decisions. Reinforcement learning can effectively improve and solve the problem of low computational efficiency of the current centralized coordination method [
34], and can effectively overcome the problems of discrete action space, difficult training convergence and poor stability of the previous reinforcement learning method [
35]. It is suitable for solving the large-scale EV charging scheme in this paper.
In this paper, an AC network is used to build the charging strategy model of EVs participating in ancillary services.
- (1)
Overall structure
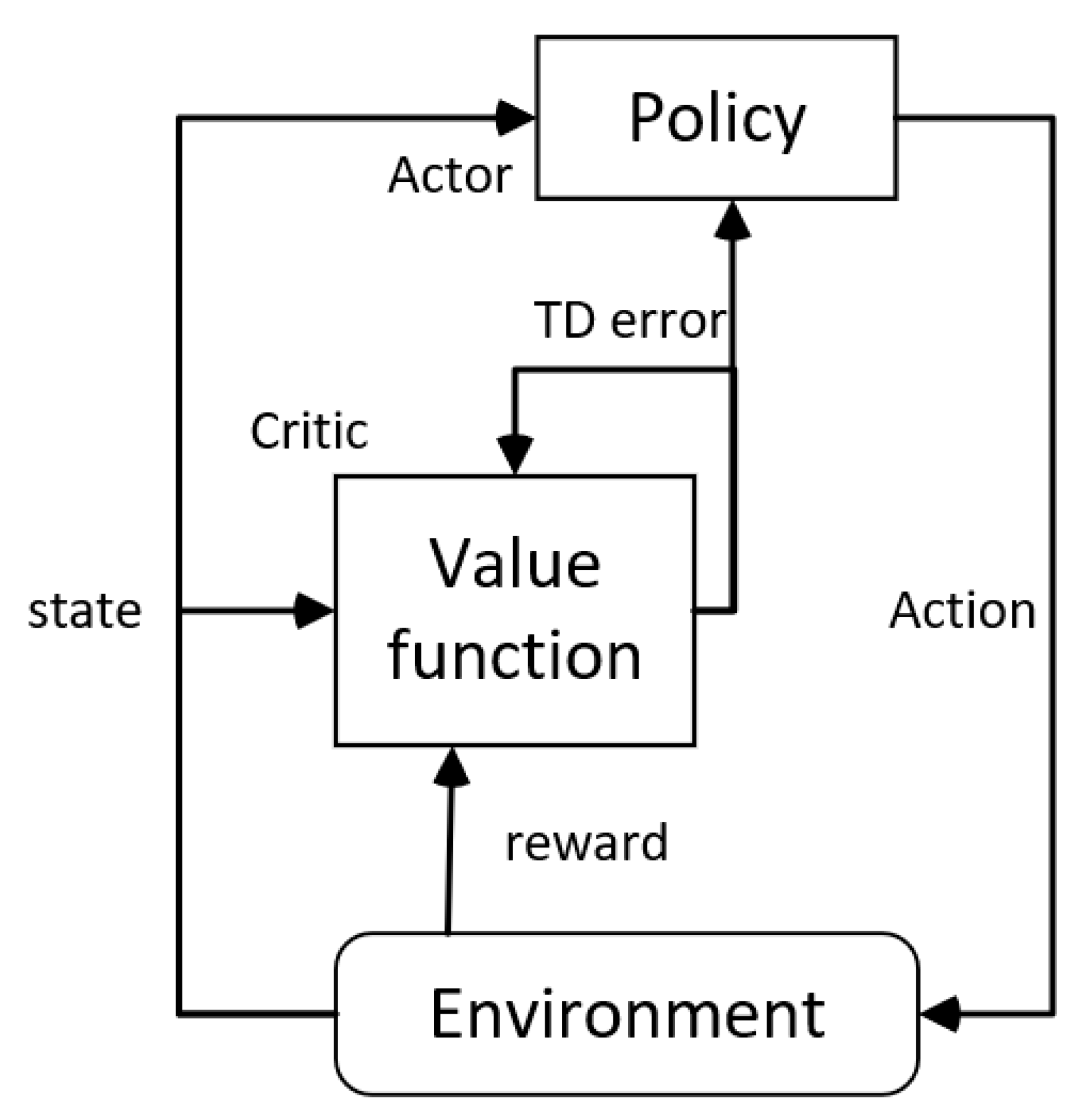
The AC framework is divided into two parts: actor and critic. Both of them are multi-layer BP neural networks. The actor selects behavior based on probability distribution and the critic evaluates score based on behavior generated by actor; the actor modifies probability of selecting behavior according to critic scores. The logic diagram of AC algorithm is shown in
Figure 4.
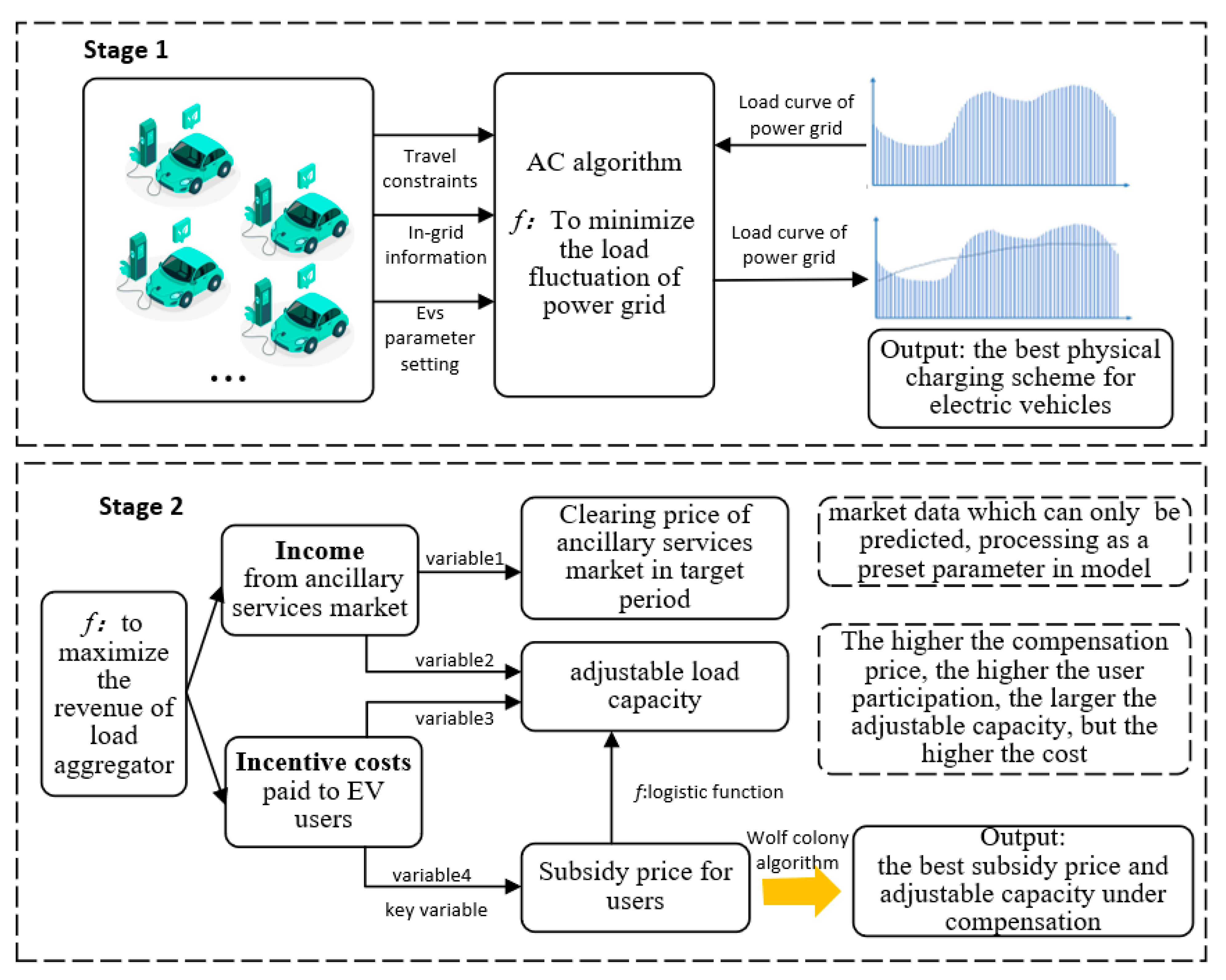
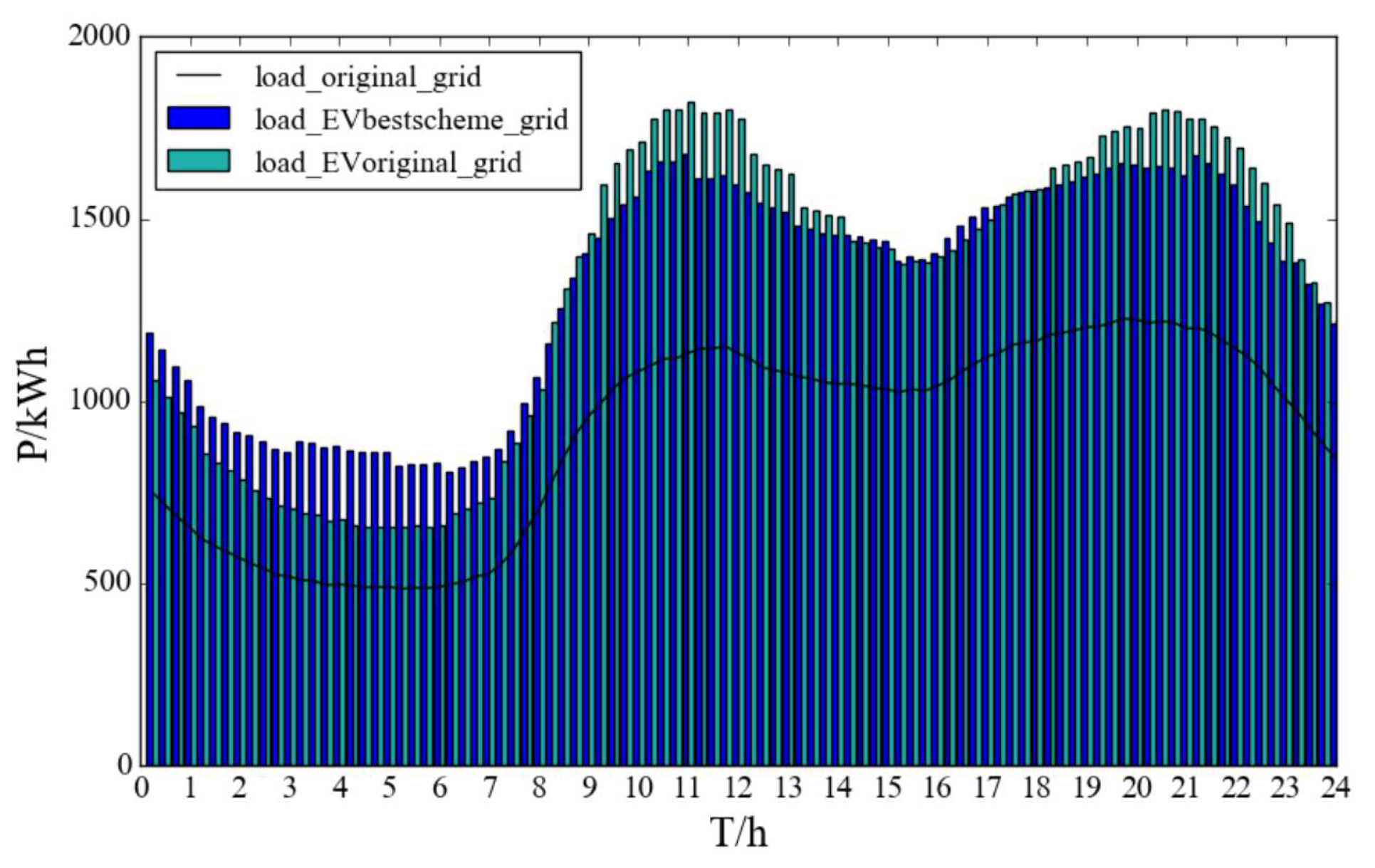
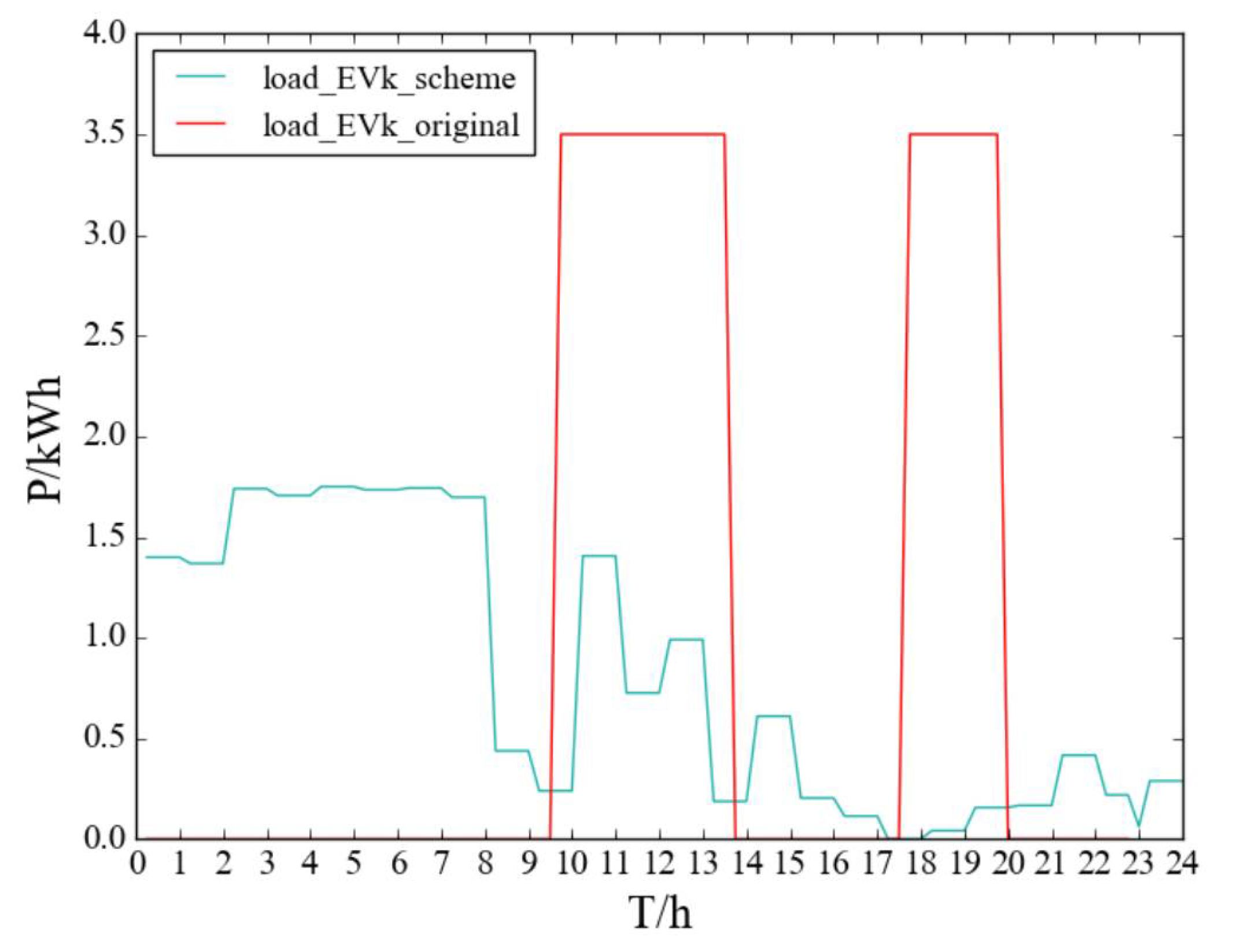
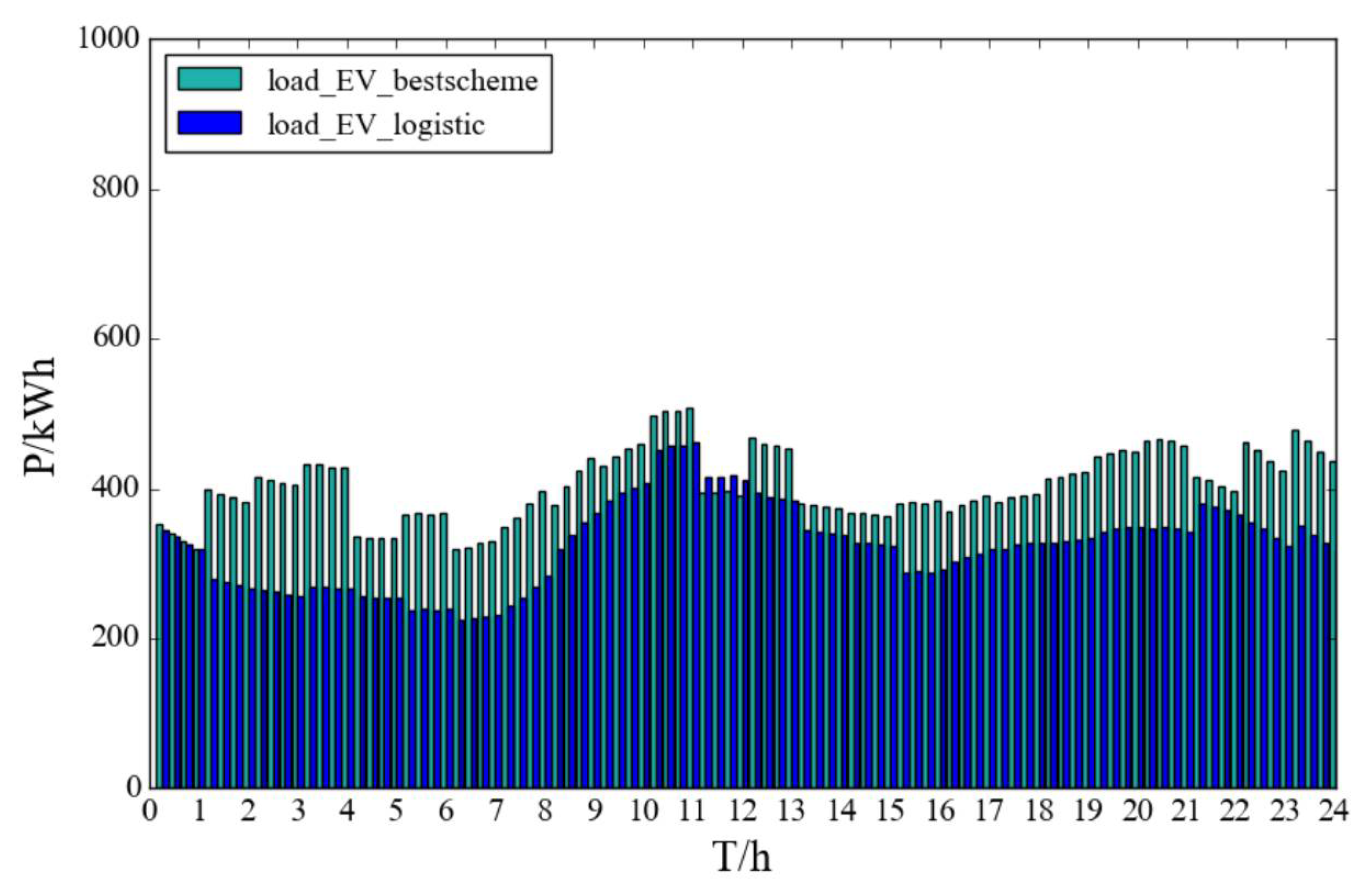
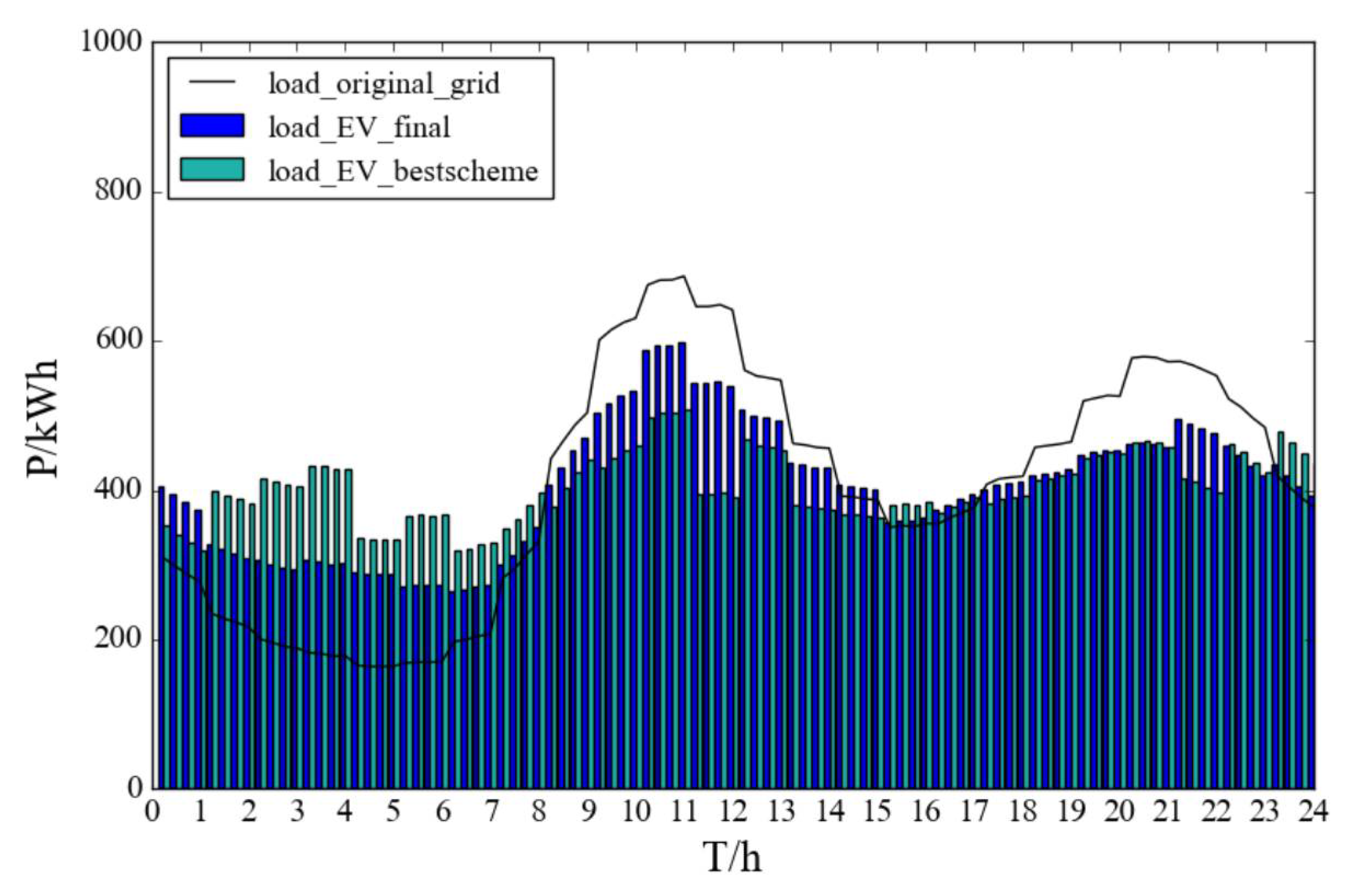
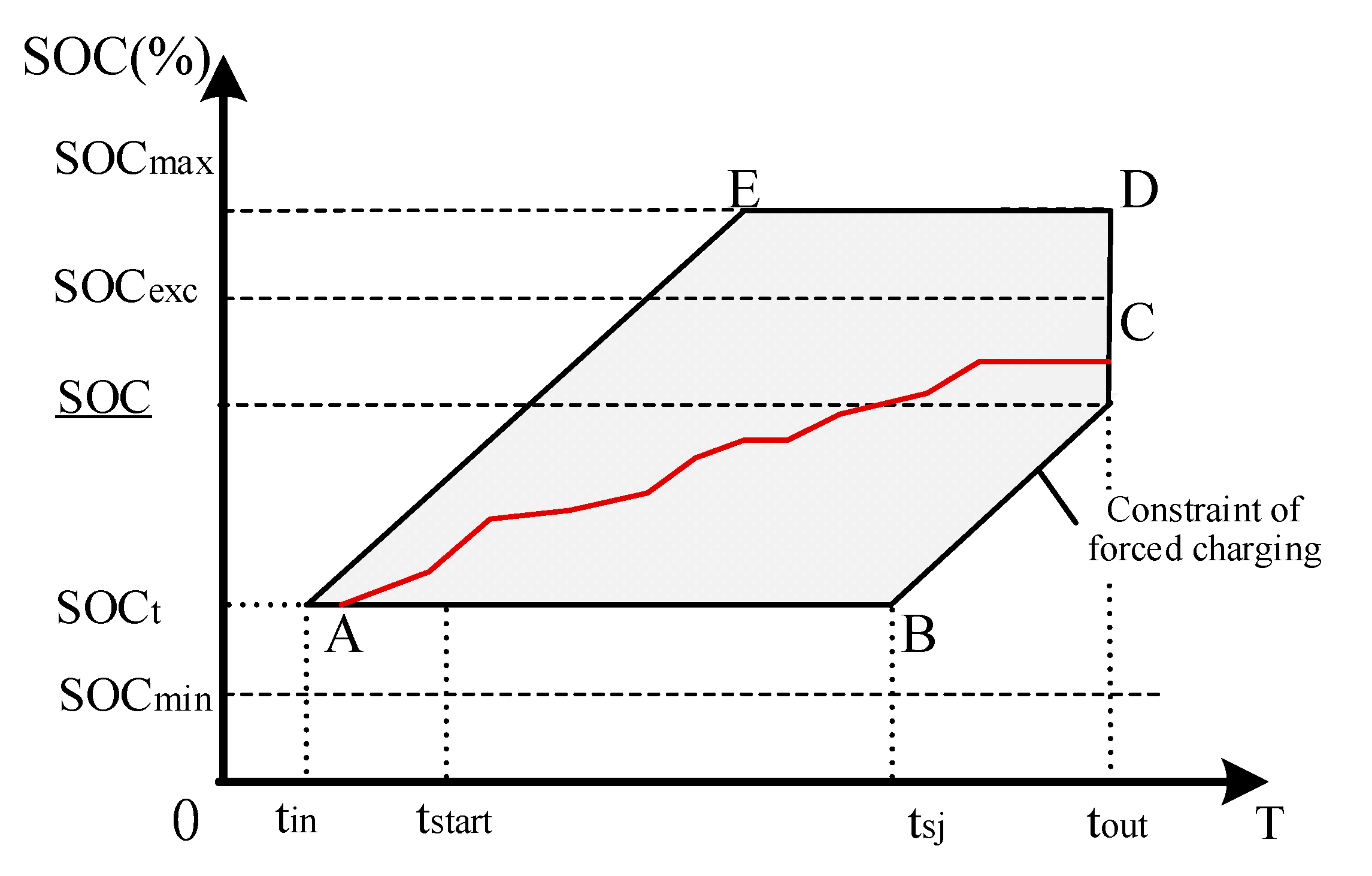
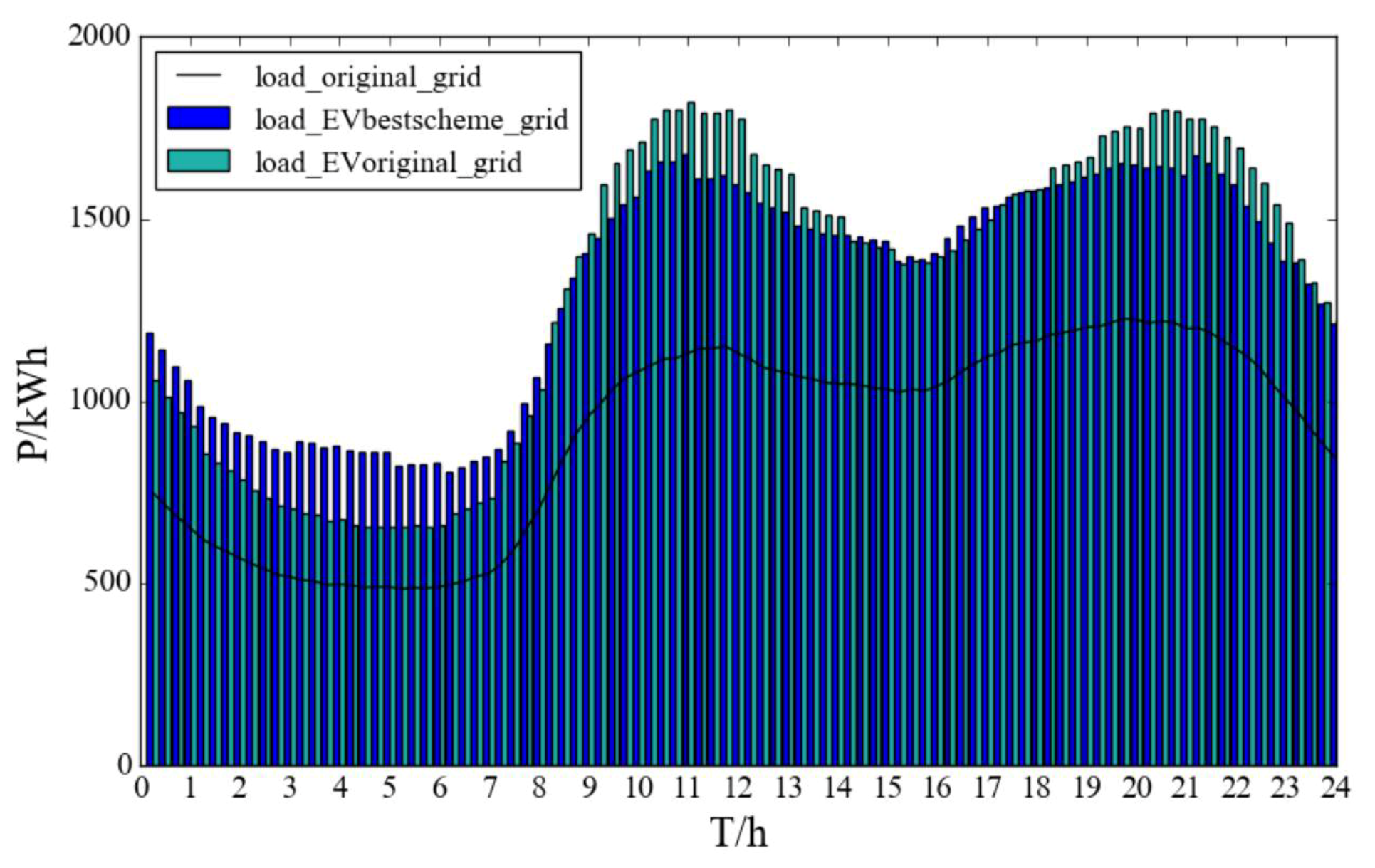
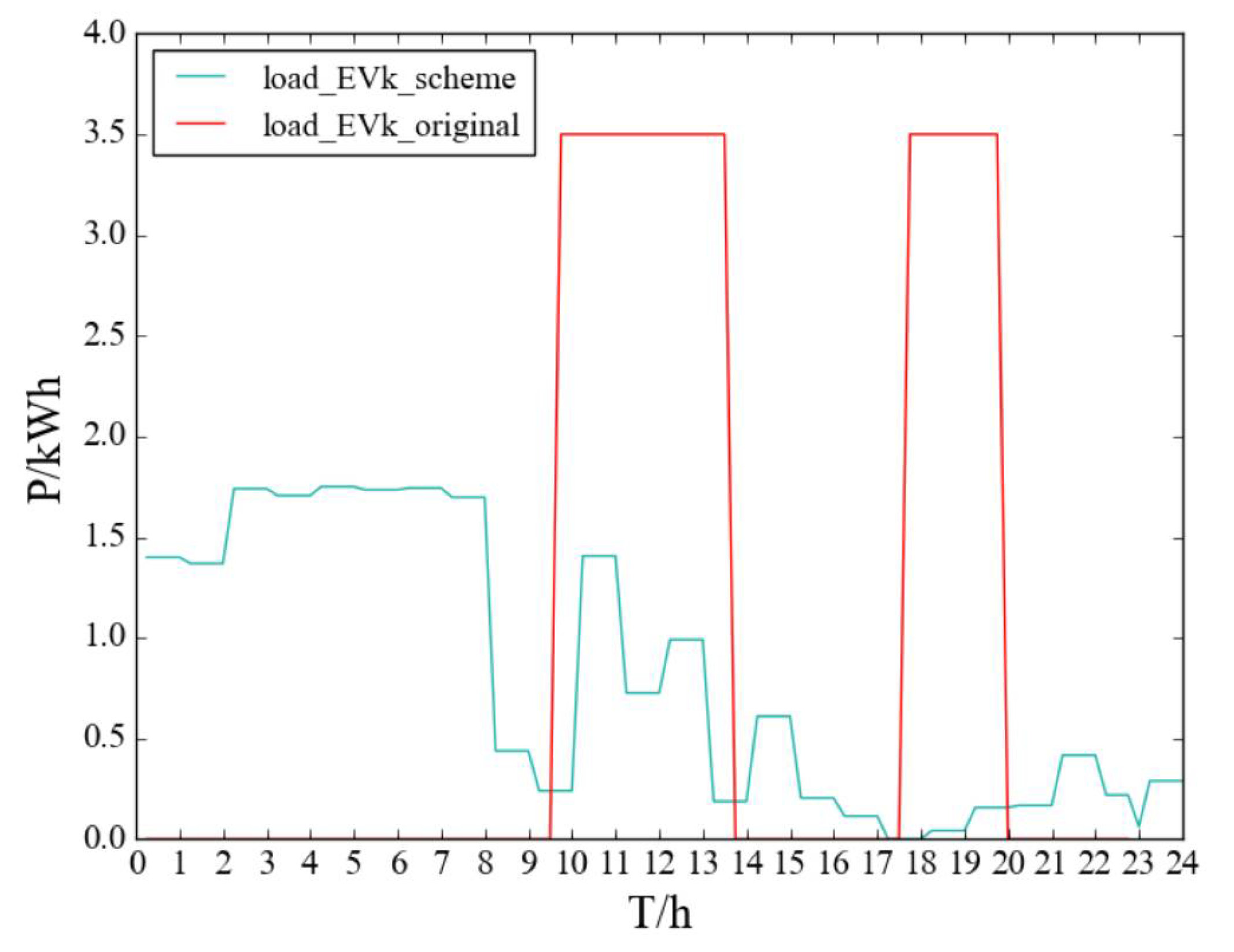
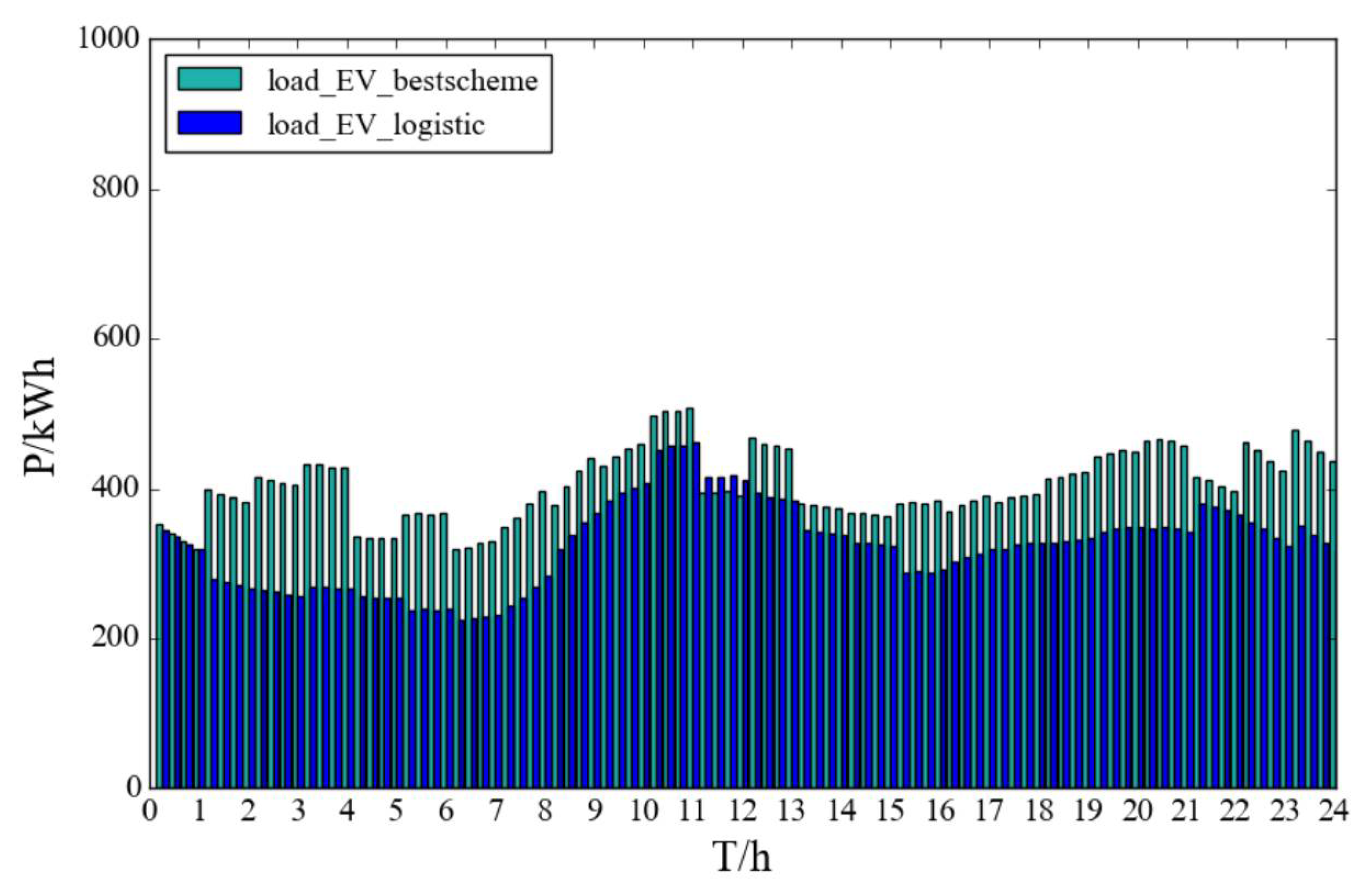
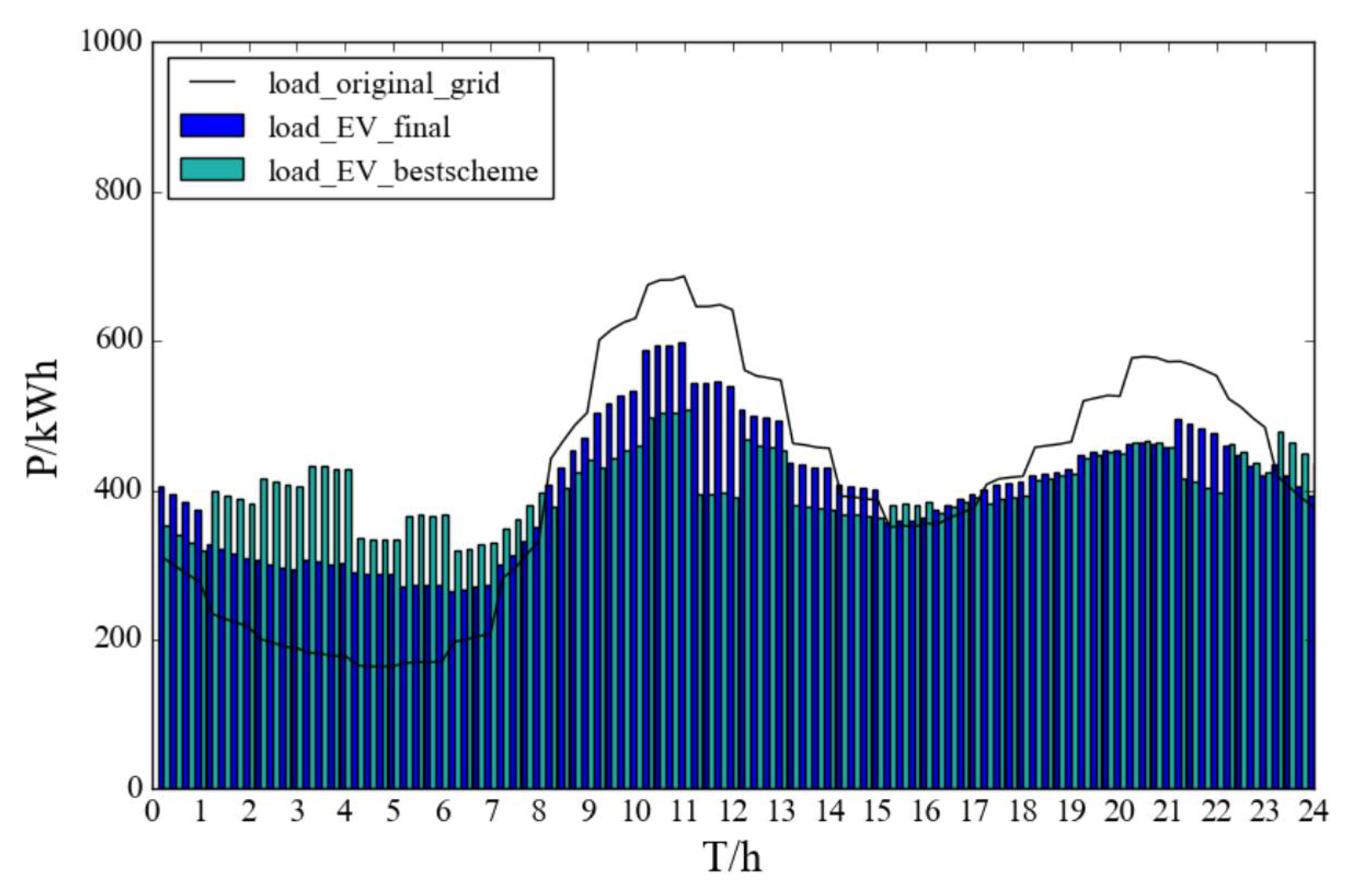
According to the scenario of solving the physical charging scheme of EVs, the AC model environment is built as follows: in the reference state, the EVs start charging after entering the grid or stop charging after reaching the expected SOC. In order to minimize the load fluctuation of EVs after grid connection, it is necessary to optimize the charging power at each time point, so as to obtain the best physical charging scheme. The state characteristics include SOC and charging time. The action distribution is the charging power of EVs at 24 time points, and the reward is the fluctuation of total load variance before and after the EVs enter the grid.
- 1.
State
is the description of the situation at the current time T. In this paper, a state section t is the state of the t-th EV after accessed to the grid.
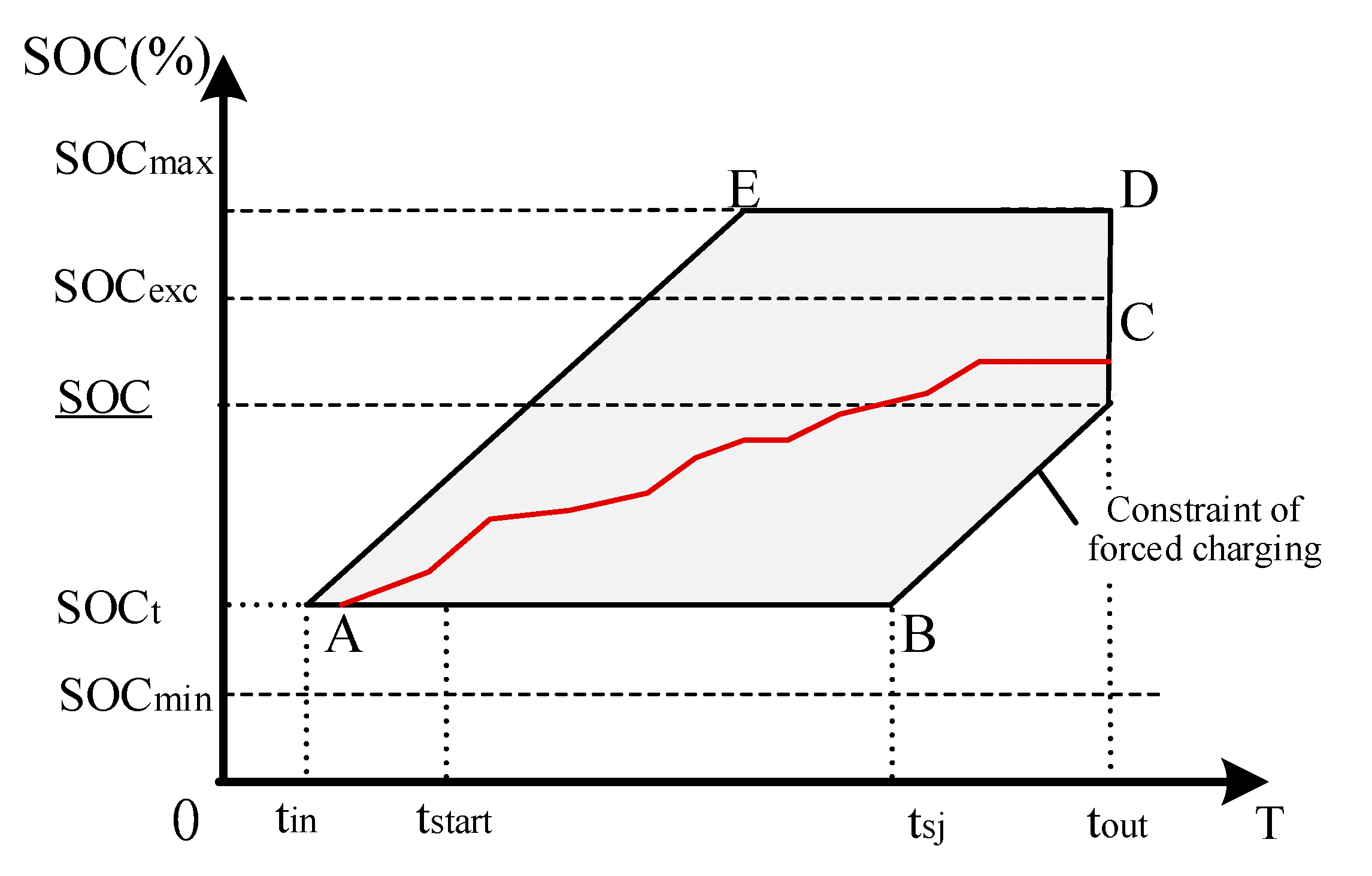
In this paper, for time t, the optimal charging scheme is determined according to its in-grid time
tin, off-grid time
tout, minimum rate of charge threshold
SOCt,min, expected rate of charge
SOCt,exc, off-grid SOC lower bound
SOCt and the latest charging time
tsj. State variables are represented as:
- 2.
Action
Action
is that at the current time t, the agent observes state
from the environment, the response to the environment. The action in this paper shall be the charging power P of EV at all times, expressed as:
- 3.
Reward
The objective of the agent is to maximize the cumulative reward. According to Formula (4), the optimization objective of the model is to minimize the load fluctuation. Therefore, for a single EV charging scheme, the reward function is set as follows:
Among them, and is the load at each time point of the power grid in the last observation state and the current observation state; and are the average load of each time point in the last observation state and the current observation state, respectively. In this paper, the load fluctuation caused by the charging scheme under a certain action is taken as a reward, and the variance is used to describe the load fluctuation. The power grid includes the total charging load of EVs and the basic load Q of the power grid .
- (2)
Actor
The Actor is an action output module, whose function is to output the probability of each action by constructing strategy gradient and training, where
is the value function generated by the Critic. The loss function of actor network is as follows:
To calculate
L (ζ) gradient, which is called the policy gradient of actor network, it can be expressed as:
where
is the gradient;
β represents the learning rate of the strategy gradient,
β ∈ (0,1). The gradient descent method is used to train the strategy gradient, and finally the actor network outputs the probability
of different actions.
- (3)
Critic
The Critic is a value evaluation module, whose function is to evaluate the value of each action according to the observation value and reward value through time difference algorithm (TD). Its output value is the estimated value of the value function of time difference algorithm, and the value function is transmitted to Actor to provide reference for Actor’s action selection.
The actual value of state action value function of EV cluster at time t is as follows:
where
is the actual value of the state action value function;
is the state of EV fleet at time t;
is the action (charging scheme) selected by the EV group at the time t is the EV individual;
represents the selection of action
for the EV fleet in status
to state
; γ is the discount factor;
indicates the maximum value of the state action function of the EV cluster in state
.
Discount factor γ indicates the rate at which rewards decay over time steps. That is to say, the further the system state is from the time t, the smaller the interest correlation. When γ = 0, only the current state interests are considered; when γ = 1, the interests of the current state and the future state are equally important.
The method of updating the Q value is as follows:
where
represents the estimated value of the state action value function of the EV at time t in the k-th iteration; α is the learning efficiency, and α < 1.
Let
as the loss function of the Critic; the gradient descent method is used to train the Critic.
At the same time, let
as the value function
in an actor network. The loss function
of the actor network is:
The gradient descent method is used to train the loss function of the actor network, and the output is the probability distribution of each action.
To sum up, the logic diagram of the algorithm is given in Algorithm 1:
| Algorithm 1: Algorithm flow |
Init D //Initialize policy pool for episode = 1 to do init Q(S, A) //Initial action value set //Set the basic load of the power grid at all times for = 1 to N do //iteration S = //Collect the information of EVs entering and leaving the grid A = //Action setting //Reward setting ( //Store data in policy pool mini-batch ( //Randomly extract data from experience pool for batch gradient descent //The output value of Critic network is the estimated value of action value function //Calculate the target value of action value function //Critic network training error gradient decent //Training critical network with gradient descent method //The output of actor network is the probability of different actions_ t) //To calculate the strategy gradient of actor network gradient decent //To calculate the strategy gradient of actor network end End //End iteration argmax() //Record the best charging scheme
|
4.2. Subsidy Price Optimization Algorithm Based on Wolf Colony Algorithm
The wolf colony algorithm is a random probability search algorithm, which can quickly find the optimal solution with a large probability. Moreover, the wolf colony algorithm also has parallelism, which can search from multiple points at the same time, and the points do not affect each other, so as to improve the efficiency of the algorithm [
36].
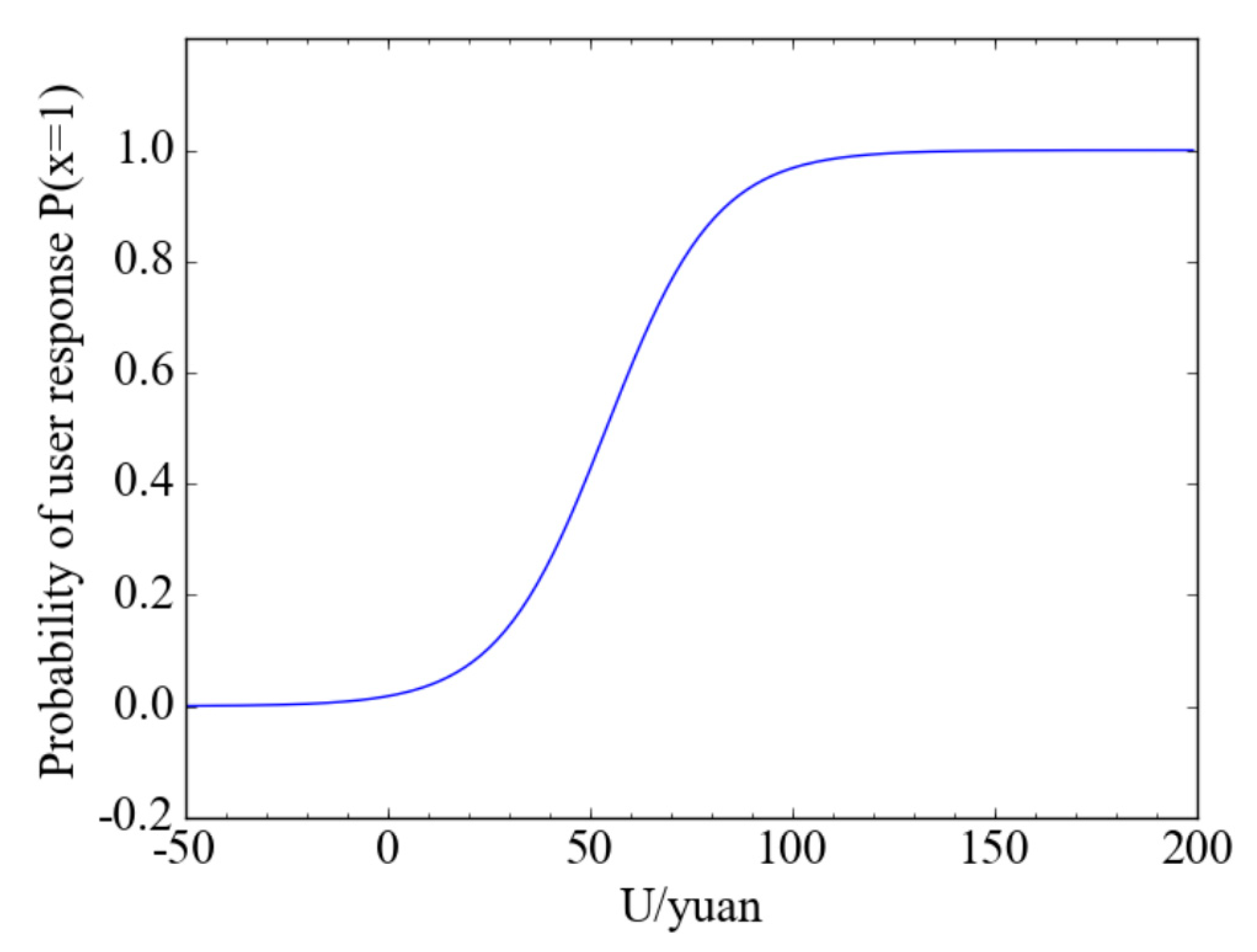
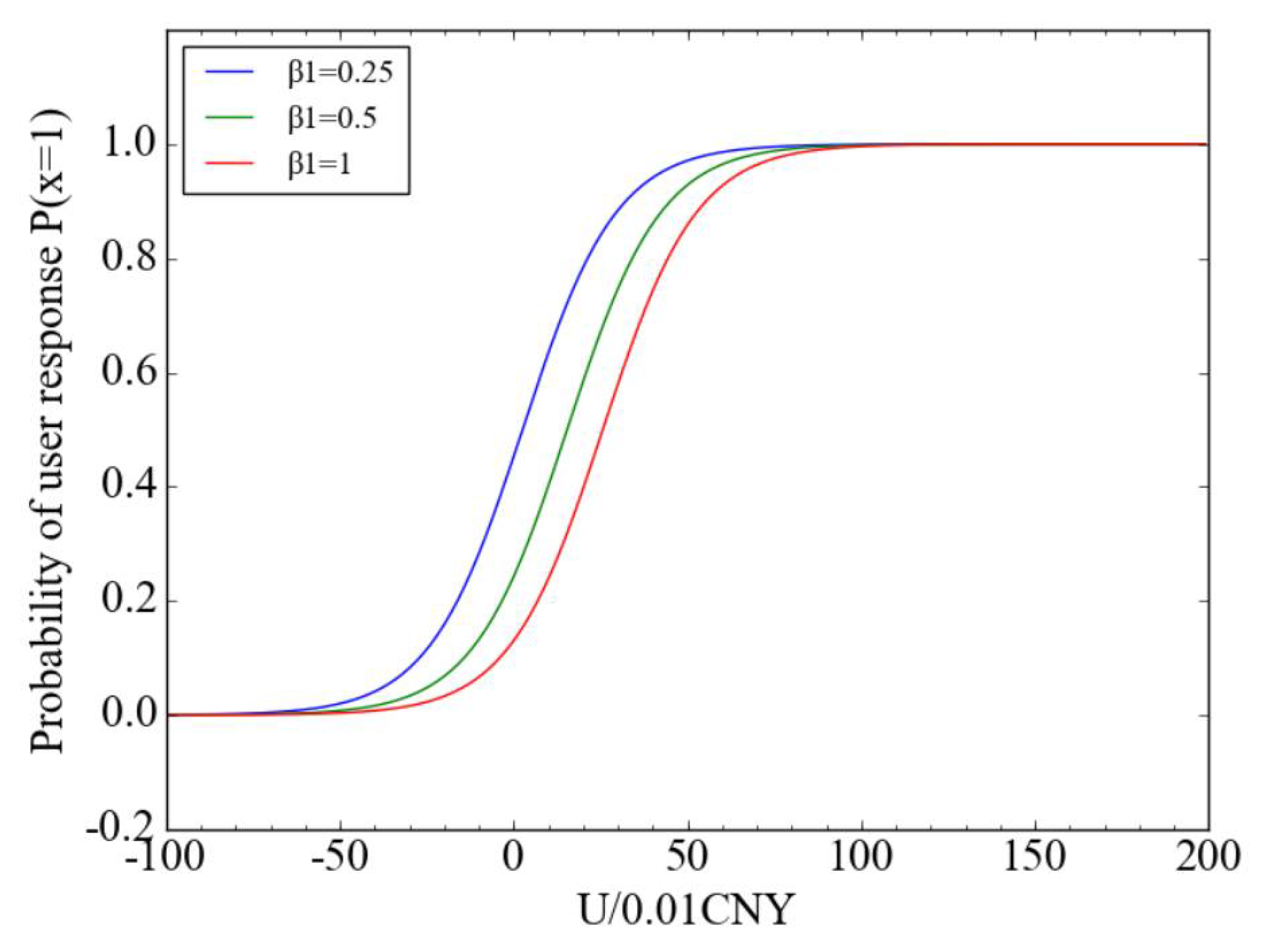
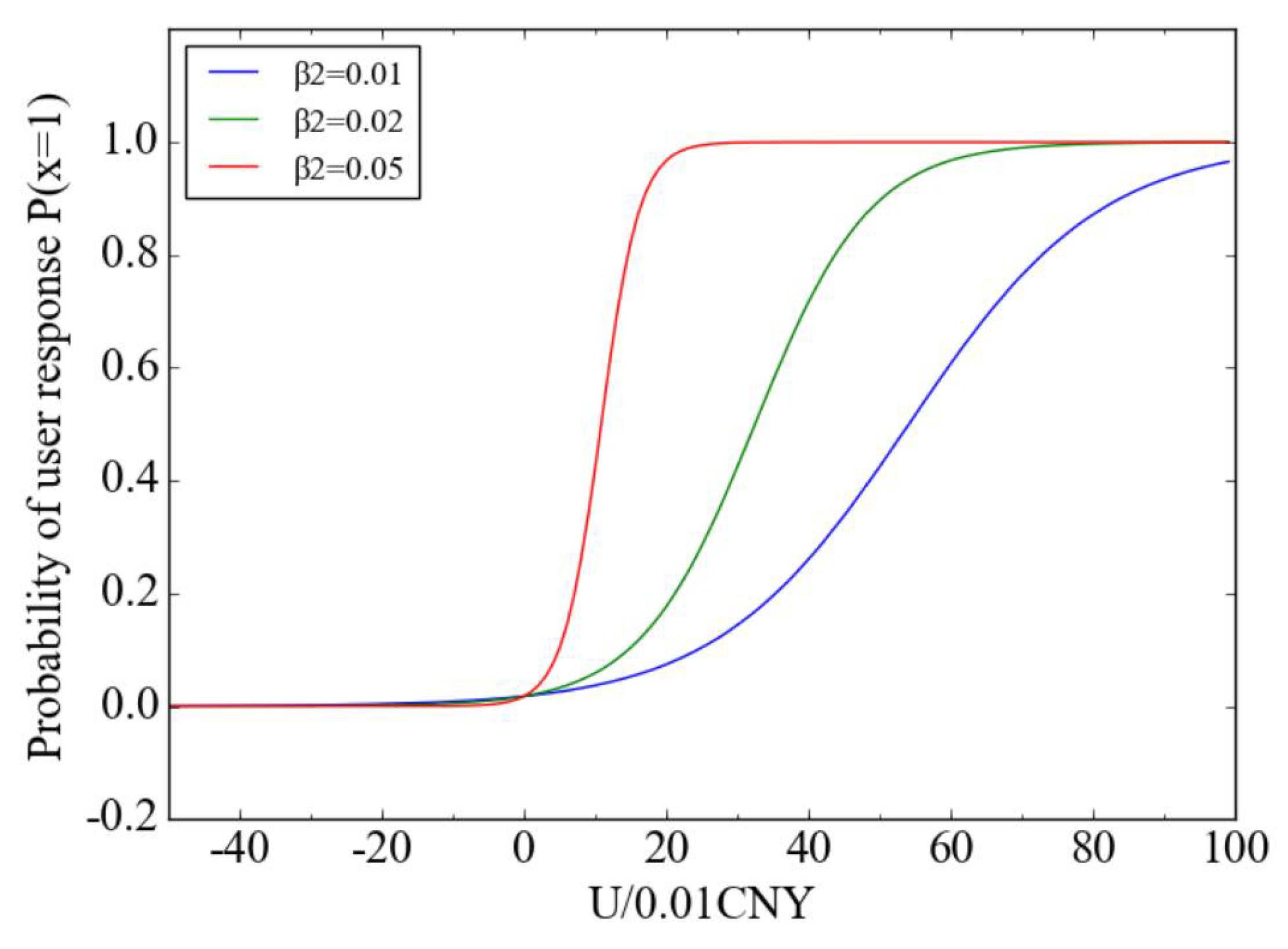
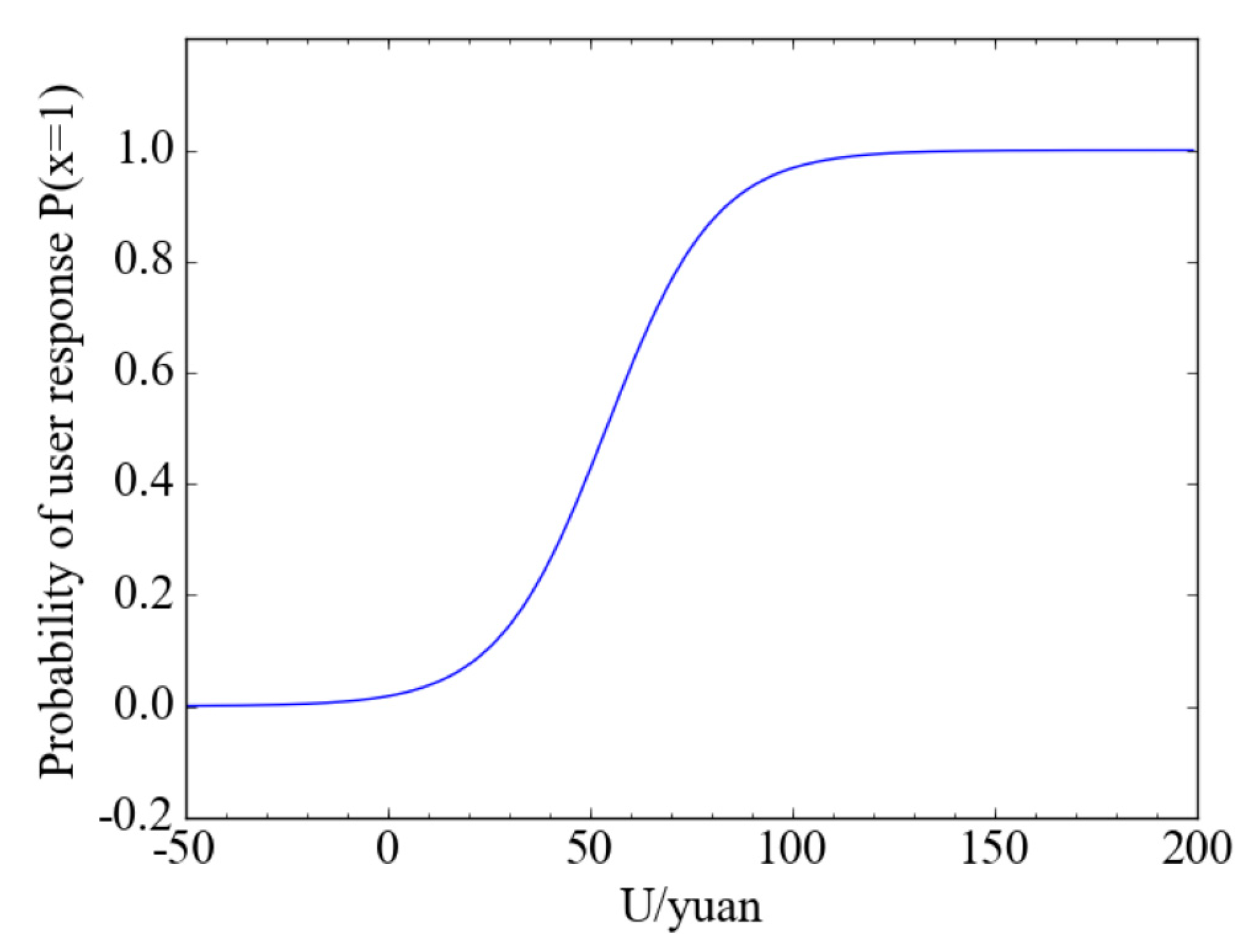
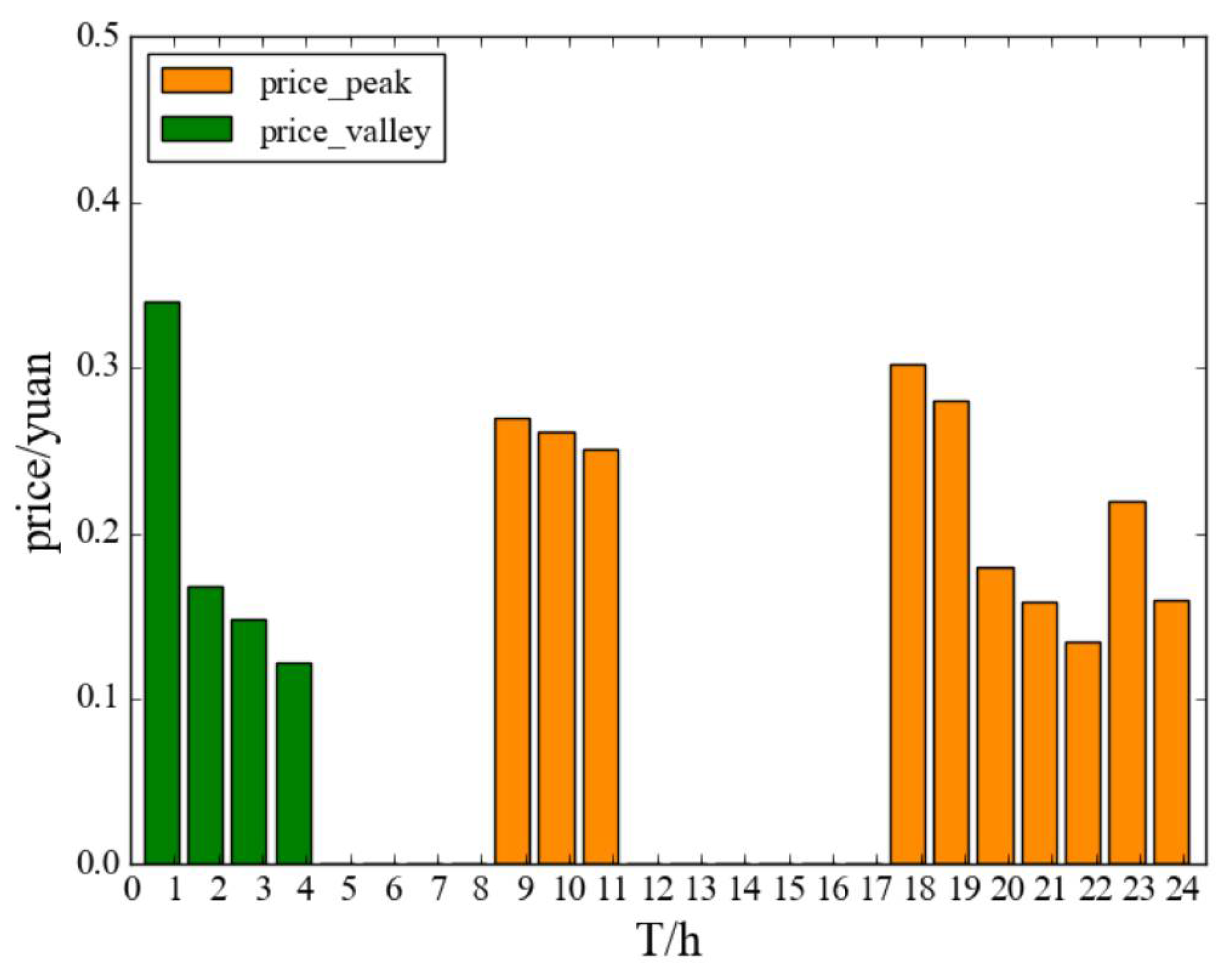
When the charging order has been issued, the EV users will respond according to the subsidy they can get by participating in the response, and choose to accept or not to accept the scheduling. Considering the large number of time-sharing price variables and the number of EVs, and that the price subsidy level at each time point is different, this section uses the optimization ability of the Gray Wolf algorithm to solve the time-sharing subsidy price optimization problem.
- (1)
Basic process
Gray Wolf algorithm is an optimization algorithm based on the three links of hunting behavior: tracking, hunting and capturing. According to the fitness value of the whole group, it is divided into leader wolf (head wolf) from top to bottom α, vice chief wolf β, common wolf δ and bottom wolf ω. The leader wolf has the highest fitness value in the group, and plays the role of specifying the moving direction of the wolf group; the ω wolves’ fitness value are low, obeying the law of α, β, δ wolves, and providing stability for the pack. The basic idea of the Gray Wolf algorithm is that α, β, δ wolves locate their prey (optimal solution) and guide ω wolves encircle and hunt.
The process of wolf hunting is as follows:
Among them, D is the distance between the individual and the prey, and is the regeneration position; represents the position vector of prey (optimal solution), represents the individual position vector of gray wolf; C and a are coefficient vectors; , is a random number vector with module length between 0 and 1.
The capture activity is mainly realized by the decrement of
A. The value of a decreases linearly from 2 to 0 with the number of iterations. In the process of decrement, the corresponding value of
A will change between [−a, a]. If
, the next generation of wolves will be closer to their prey; if
, the wolves will disperse away from the prey, resulting in the loss of the optimal solution position and falling into the local optimum. The updating formula of a value is as follows:
where
t is the current number of iterations and
T is the preset maximum number of iterations.
When wolves capture, the location of the wolf
, wolf
, wolf
with the highest fitness value is calculated to determine the location of the optimal solution:
Finally, the location of the wolves is determined by the wolf
, wolf
, wolf
:
The fitness function in this paper is the expected profit F of load aggregators participating in the ancillary service market described in Formula (6). The decision variable is the subsidy price at 24 time points, expressed as , so the position space of the corresponding wolf pack is expressed as an n × 24 matrix.
- (2)
Algorithm solving steps
The steps of the Gray Wolf algorithm are as follows:
Step 1: determine the parameters of total overlap algebra K, population size m, etc.;
Step 2: generate the initial candidate price subsidy according to the coding rule of Formula (19);
Step 3: the individual fitness value in the current population is calculated according to the objective function Formula (18) and constraint condition Formula (21); to update the location of wolf , wolf , wolf , and the position vector of wolf detection is generated according to the historical data;
Step 4: update the position vector of the wolf , wolf , wolf and the observation wolf according to Formulas (38)–(39); guide the wolves to update the position according to Equation (40), and update the parameters A and C.
Step 5: if the wolf colony fitness value reaches the maximum number of iterations, the algorithm achieves the expected goal and stops and then goes to step 6; if not, it goes to step 3;
Step 6: the algorithm ends and outputs the individual with the highest fitness value.
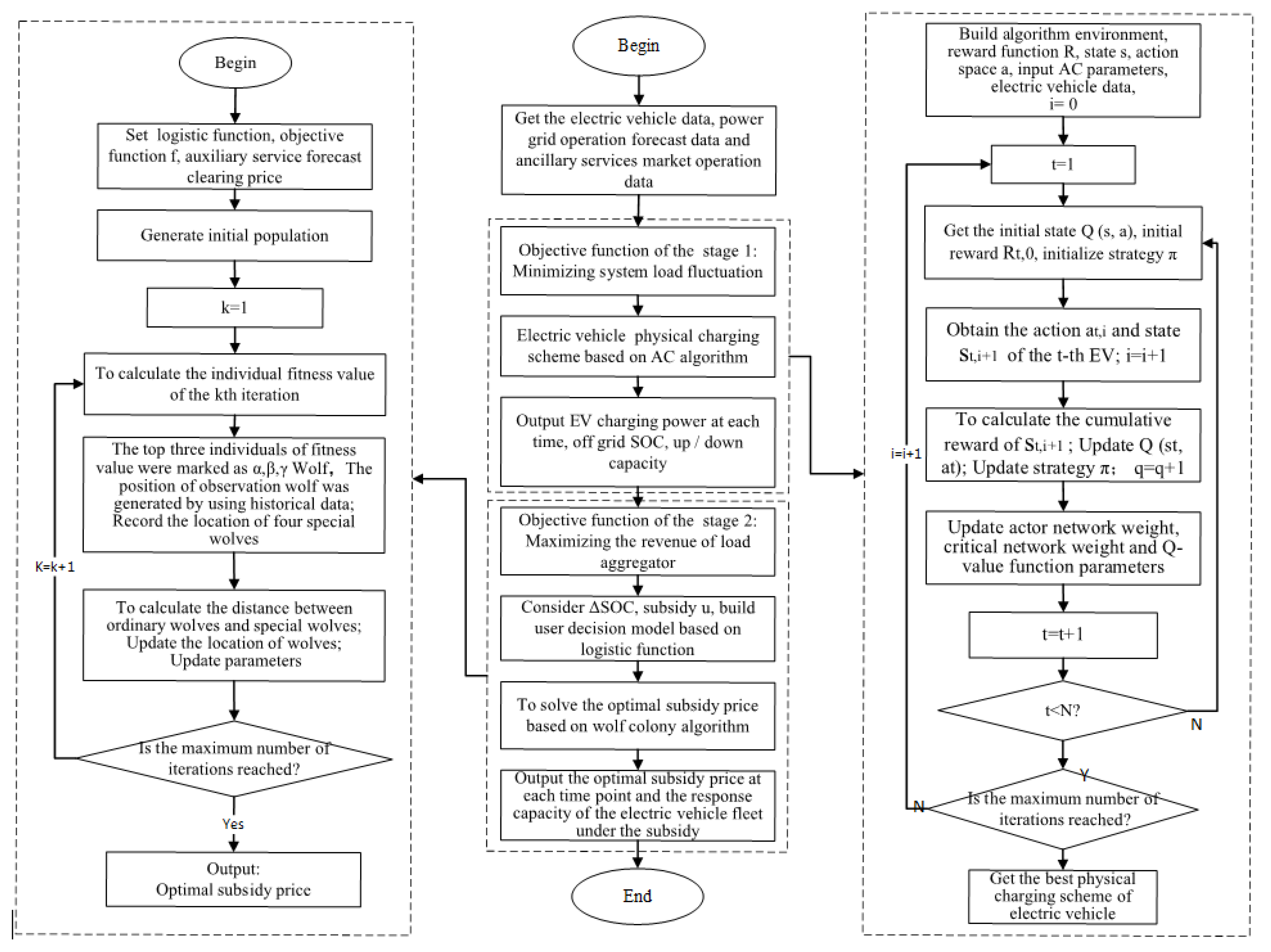
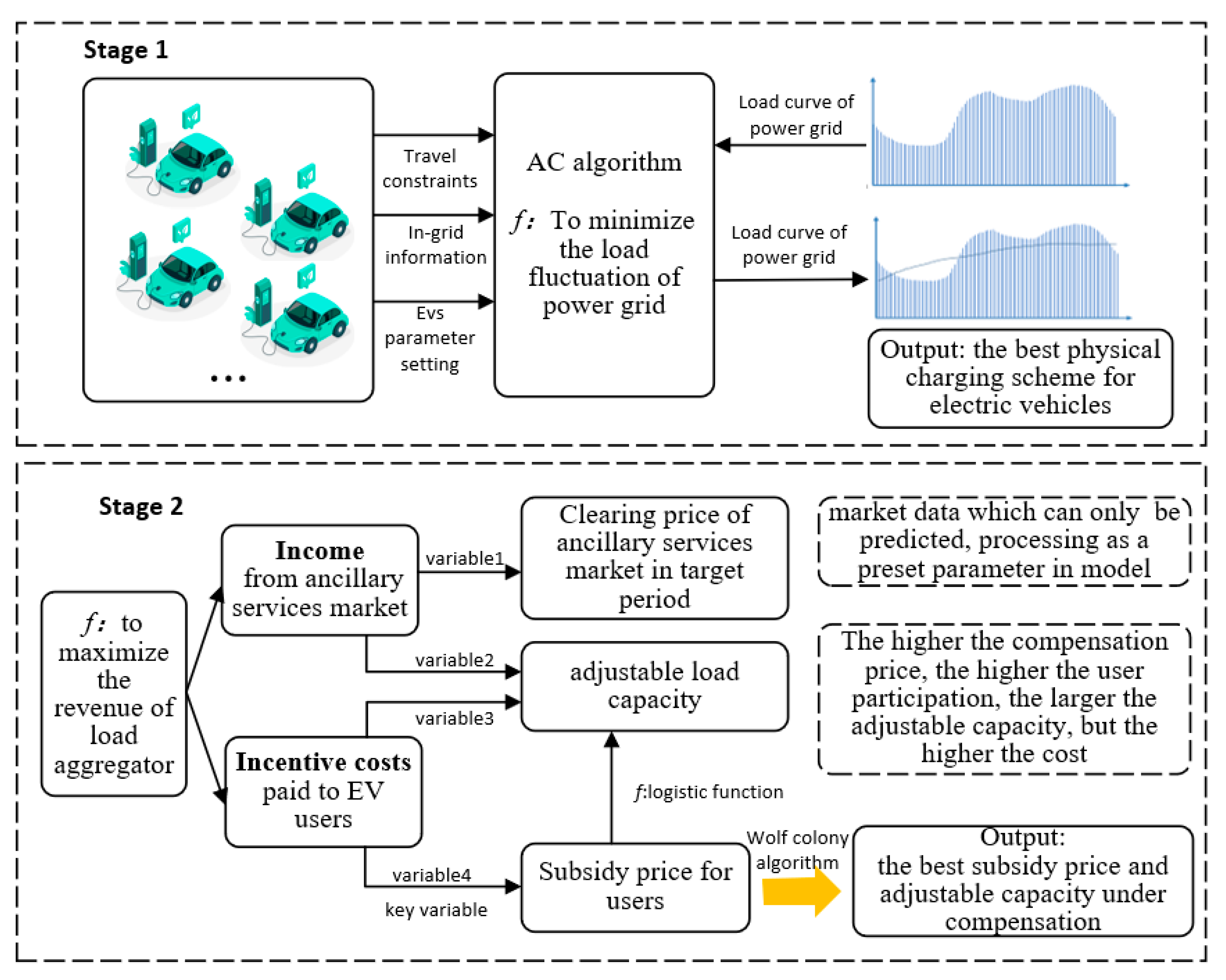
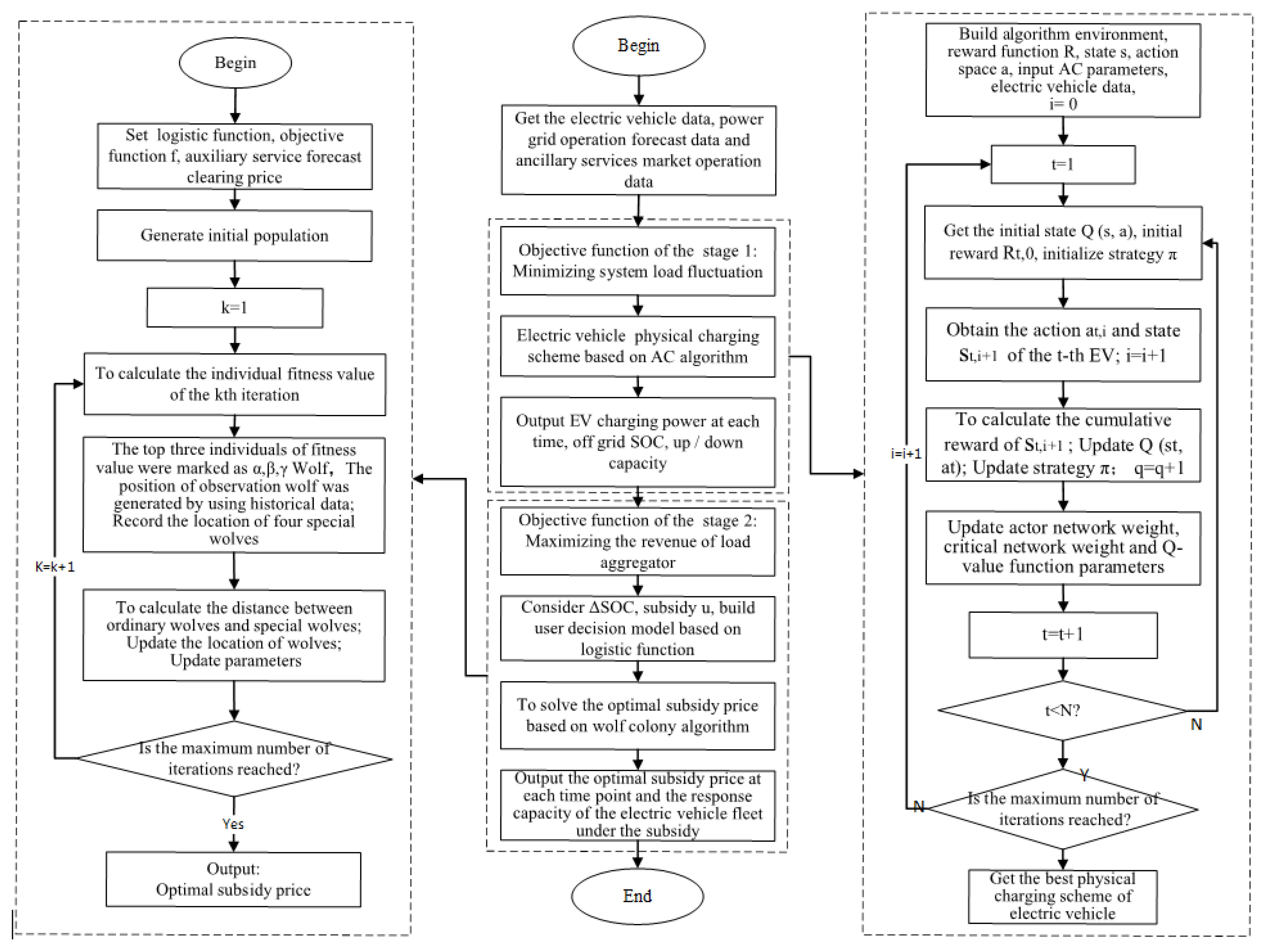
In conclusion, the flow chart of two-stage EV physical and economic adjustable capacity evaluation based on AC reinforcement learning and the wolf colony algorithm is shown in
Figure 5.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}