
A Compressed Sensing Recovery Algorithm Based on Support Set Selection


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Principles
2.1. CS Theory
2.2. Problem Statement
2.3. Convex Optimization Recovery Algorithm
3. Recovery Algorithm Based on Support Set Selection
3.1. Analysis of Ideal System
3.2. Analysis of a Noise-Affected System
3.3. Algorithm Procedure
| Algorithm 1. The supp-BPDN algorithm procedure |
| Inputs: Measurement matrix , measurements , circulation times t Initialization: Assistant vector ( denotes the zero vector), estimated support set Procedure: 1. . 2. . 3. 4. Cycle step 1 to step 3 for t times. 5. , the rest elements of are still 0. 6. Solving to obtain . 7. (⊙ is the Hadamard product). Output: Estimation values |
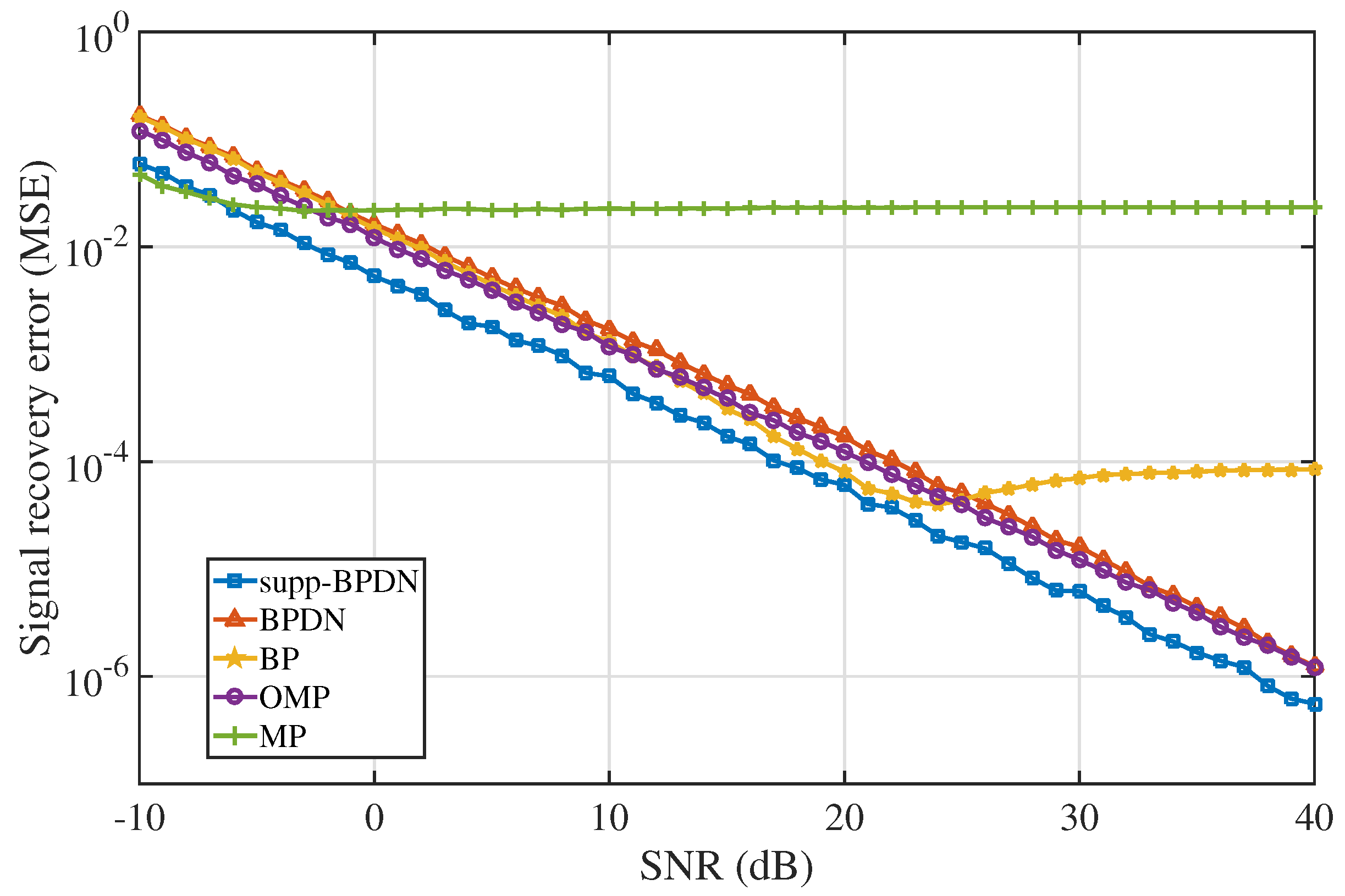
4. Numerical Simulations
5. CS System for Microwave Photonics
5.1. System Setup
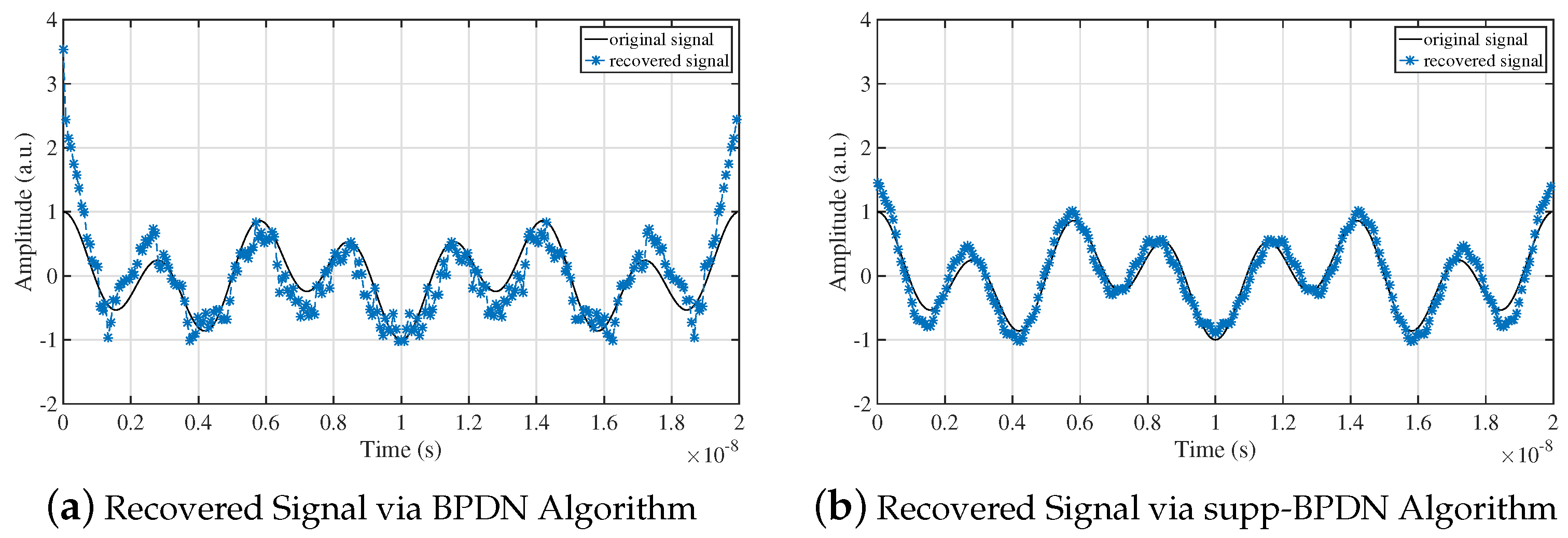
5.2. Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CS | Compressive sensing |
| DOA | Direction of arrival |
| CR | Cognitive radio |
| MM | Measurement matrix |
| PRBS | Pseudo random bit sequence |
| ADC | Analog-to-digital converter |
| RIP | Restricted isometry property |
| PD | Photodiode |
| NPH | Non-deterministic polynomial hard |
| BP | Basis pursuit |
| BPDN | Basis pursuit denoising |
| SNR | Signal-to-noise ratio |
| MSE | Mean square error |
| RD | Random demodulator |
| SLM | Spatial light modulator |
| MZM | Mach–Zehnder modulator |
| MP | Matching pursuit |
| LPF | Low-pass filter |
| RIC | Restricted isometry constant |
| CW | Continuous wave |
| SMF | Single mode fiber |
| RF | Radio frequency |
| BCS | Bayesian compressive sensing |
| OMP | orthogonal matching pursuit |
References
- Emmanuel, J.C.; Romberg, J.; Tao, T. Robust Uncertainty Principles: Exact Signal Reconstruction From Highly Incomplete Frequency Information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar]
- David, L.D. Compressed Sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar]
- Cohen, D.; Eldar, Y.C. Sub-Nyquist Radar Systems. IEEE Signal Process. Mag. 2018, 11, 35–58. [Google Scholar] [CrossRef]
- Marco, F. Duarte; Mark A. Davenport; Dharmpal Takhar. Single-Pixel Imaging via Compressive Sampling. IEEE Signal Process. Mag. 2008, 3, 83–91. [Google Scholar]
- Lustig, M.; Donoho, D.; Pauly, J.M. Sparse MRI: The Application of Compressed Sensing for Rapid MR Imaging. Magn. Reson. Med. 2007, 58, 1182–1195. [Google Scholar] [CrossRef] [PubMed]
- Lei, C.; Wu, Y.; Sankaranarayanan, A.C. GHz Optical Time-Stretch Microscopy by Compressive Sensing. IEEE Photon. J. 2017, 9. [Google Scholar] [CrossRef]
- Shen, Q.; Liu, W.; Cui, W.; Wu, S. Underdetermined DOA Estimation Under the Compressive Sensing Framework: A Review. IEEE Access 2017, 4, 8865–8878. [Google Scholar] [CrossRef]
- Bazerque, J.A.; Giannakis, G.B. Distributed Spectrum Sensing for Cognitive Radio Networks by Exploiting Sparsity. IEEE Trans. Signal Process. 2010, 58, 1847–1862. [Google Scholar] [CrossRef]
- Nyquist, H. Gertain Factors Affecting Telegraph Speed. Bell Syst. Tech. J. 1928, 124–130. [Google Scholar]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Tropp, J.A.; Laska, J.N.; Laska, J.N. Beyond Nyquist: Efcient Sampling of Sparse Bandlimited Signals. IEEE Trans. Inf. Theory 2009, 56, 520–544. [Google Scholar] [CrossRef]
- Mishali, M.; Eldar, Y.C. From Theory to Practice: Sub-Nyquist Sampling of Sparse Wideband Analog Signals. IEEE J.-STSP 2010, 4, 375–391. [Google Scholar] [CrossRef]
- Nichols, J.M.; Bucholtz, F. Beating Nyquist with light: A compressively sampled photonic link. Opt. Express 2011, 19, 7339–7348. [Google Scholar] [CrossRef]
- Chi, H.; Mei, Y.; Chen, Y. Microwave spectral analysis based on photonic compressive sampling with random demodulation. Opt. Lett. 2012, 37, 4636–4638. [Google Scholar] [CrossRef]
- Chen, Y.; Chi, H.; Jin, T. Sub-Nyquist Sampled Analog-to-Digital Conversion Based on Photonic Time Stretch and Compressive Sensing With Optical Random Mixing. J. Light. Technol. 2013, 31, 3395–3401. [Google Scholar] [CrossRef]
- Liang, Y.; Chen, M.; Chen, H. Photonic-assisted multi-channel compressive sampling based on effective time delay pattern. Opt. Express 2013, 21, 25700–25707. [Google Scholar] [CrossRef] [PubMed]
- Bosworth, B.T.; Foster, M.A. High-speed ultrawideband photonically enabled compressed sensing of sparse radio frequency signals. Opt. Lett. 2013, 38, 4892–4895. [Google Scholar] [CrossRef] [PubMed]
- Chi, H.; Chen, Y.; Mei, Y. Microwave spectrum sensing based on photonic time stretch and compressive sampling. Opt. Lett. 2013, 38, 136–138. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Yu, X.; Chi, H. Compressive sensing in a photonic link with optical integration. Opt. Lett. 2014, 39, 2222–2224. [Google Scholar] [CrossRef]
- Guo, Q.; Liang, Y.; Chen, M. Compressive spectrum sensing of radar pulses based on photonic techniques. Opt. Express 2015, 23, 4517–4522. [Google Scholar] [CrossRef]
- Bosworth, B.T.; Stroud, J.R.; Tran, D.N. Ultrawideband compressed sensing of arbitrary multi-tone sparse radio frequencies using spectrally encoded ultrafast laser pulses. Opt. Lett. 2015, 40, 3045–3048. [Google Scholar] [CrossRef]
- Chi, H.; Zhu, Z. Analytical Model for Photonic Compressive Sensing With Pulse Stretch and Compression. IEEE Photon. J. 2019, 11, 5500410. [Google Scholar] [CrossRef]
- Zhu, Z.; Chi, H.; Jin, T. Photonics-enabled compressive sensing with spectral encoding using an incoherent broadband source. Opt. Lett. 2018, 43, 330–333. [Google Scholar] [CrossRef] [PubMed]
- Valley, G.C.; Sefler, G.A.; Shaw, T.J. Compressive sensing of sparse radio frequency signals using optical mixing. Opt. Lett. 2012, 37, 4675–4677. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.S.; Donoho, D.L.; Saunders, M.A. Atomic Decomposition by Basis Pursuit. SIAM Rev. 2001, 43, 129–159. [Google Scholar] [CrossRef]
- Hale, E.T.; Yin, W.; Zhang, Y. Fixed-Point Continuation for ℓ1-Minimization: Methodology and Convergence. Siam J. Optim. 2008, 19, 1107–1130. [Google Scholar] [CrossRef]
- Mallat, S.G.; Zhang, Z. Matching pursuits with time-frequency dictionaries. IEEE Trans. Signal Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal Recovery From Random Measurements Via Orthogonal Matching Pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Needell, D.; Tropp, J.A. CoSaMP: Iterative signal recovery from incomplete and inaccurate samples. Appl. Comput. Harmon. Anal. 2008, 26, 301–321. [Google Scholar] [CrossRef]
- Lu, D.; Sun, G.; Li, Z.; Wang, S. Improved CoSaMP Reconstruction Algorithm Based on Residual Update. J. Comput. Commun. 2019, 7, 6–14. [Google Scholar] [CrossRef][Green Version]
- Dai, L.; Wang, Z.; Yang, Z. Compressive Sensing Based Time Domain Synchronous OFDM Transmission for Vehicular Communications. IEEE J. Sel. Areas Commun. 2013, 31, 460–469. [Google Scholar]
- Zhang, W.; Li, H.; Kong, W.; Fan, Y.; Cheng, W. Structured Compressive Sensing Based Block-Sparse Channel Estimation for MIMO-OFDM Systems. Wireless Pers. Commun. 2019, 108, 2279–2309. [Google Scholar] [CrossRef]
- Ji, S.; Xue, Y.; Carin, L. Bayesian Compressive Sensing. IEEE Trans. Signal Process. 2008, 56, 2346–2356. [Google Scholar] [CrossRef]
- Wipf, D.P.; Rao, B.D. An Empirical Bayesian Strategy for Solving the Simultaneous Sparse Approximation Problem. IEEE Trans. Signal Process. 2007, 55, 3704–3716. [Google Scholar] [CrossRef]
- Oikonomou, V.P.; Nikolopoulos, S.; Kompatsiaris, I. A Novel Compressive Sensing Scheme under the Variational Bayesian Framework. In Proceedings of the European Signal Processing Conference, 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019. [Google Scholar]
- Candès, E.J. The restricted isometry property and its implications for compressed sensing. CR Math. 2008, 346, 589–592. [Google Scholar] [CrossRef]
- Eldar, Y.C.; Kutyniok, G. Compressed Sensing: Theory and Applications, 3rd ed.; Cambridge University Press: Cambridge, UK, 2013; pp. 25–26, 349–351. [Google Scholar]
- Baraniuk, R.; Davenport, M.; DeVore, R.; Wakin, M. A Simple Proof of the Restricted Isometry Property for Random Matrices. Constr. Approx 2008, 28, 253–263. [Google Scholar] [CrossRef]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 3rd ed.; MIT Press: Cambridge, MA, USA, 2009; pp. 616–623. [Google Scholar]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, W.; Wang, Z.; Lu, G.; Jiang, Y. A Compressed Sensing Recovery Algorithm Based on Support Set Selection. Electronics 2021, 10, 1544. https://doi.org/10.3390/electronics10131544
Liang W, Wang Z, Lu G, Jiang Y. A Compressed Sensing Recovery Algorithm Based on Support Set Selection. Electronics. 2021; 10(13):1544. https://doi.org/10.3390/electronics10131544
Chicago/Turabian StyleLiang, Wandi, Zixiong Wang, Guangyu Lu, and Yang Jiang. 2021. "A Compressed Sensing Recovery Algorithm Based on Support Set Selection" Electronics 10, no. 13: 1544. https://doi.org/10.3390/electronics10131544
APA StyleLiang, W., Wang, Z., Lu, G., & Jiang, Y. (2021). A Compressed Sensing Recovery Algorithm Based on Support Set Selection. Electronics, 10(13), 1544. https://doi.org/10.3390/electronics10131544