1. Introduction
Chaos is a form of motion specific to nonlinear dynamical systems [
1]. Since the 1990s, the study of chaos and related disciplines has been promoted and developed, and the requirements for chaos in different fields have also been developed. People have constructed many new chaotic systems based on existing chaotic systems, including the introduction of a memory resistor to construct a new chaotic system. Memristive components have unique nonlinear characteristics and are easy to combine with oscillator circuits to generate complex and variable chaotic signals; thus, they have attracted much attention in the design of chaotic circuits and other aspects. The memristor is the fourth basic circuit element that reflects the relationship between magnetic flux and charge [
2], and it has the characteristics of fast operation, programmability, low energy consumption and nonlinearity. Another definition of chaos has been given based on homoclinic and heteroclinic cycles, which play an important role in the study of chaotic dynamics. The famous Shil’nikov theorems for differential vector fields showed that the existence of a homoclinic or a heteroclinic cycle implies the existence of a countable number of horseshoes in a neighborhood of this cycle under certain conditions [
3]. Therefore, chaotic systems constructed by memristors are usually capable of generating complex dynamical behaviors, and they have a wide range of applications in the fields of neural networks [
4,
5,
6], chaotic circuits [
7] and image encryption [
8,
9].
At present, there are two main methods for constructing memristive chaotic systems: one method is to introduce the memristor into the original system as a feedback term or use the memristor to replace the coupling parameters of the original system; the other method is to utilize the memristor to replace the linear or nonlinear device of the original circuit. In 2014, Ontañón-García et al. proposed a chaotic multivolume attractor generation mechanism based on unstable dissipative systems, which changes the equilibrium position of the unstable dissipative systems by switching the control law to generate a multivolume chaotic attractor. They explained the different concepts involved, such as hysteresis and the step function, from a unified viewpoint, extended the concept of chaos from R3 to hyperchaotic multivolume systems in Rn, and also verified the validity of the theory using the example of a synchronous communication system [
10]. In 2018, Chen et al. proposed a memristive circuit based on an active bandpass filter, which has super-multistability and rich dynamic behavior [
11]. In the same year, Wang et al. established a corresponding Simulink simulation model based on the mathematical models of three memory elements: the memristor, the memristor container and the memristor inductor; then, they studied the effects of frequency and amplitude on the respective device models, which provided a theoretical basis for subsequent application research [
12]. In 2020, Zeng et al. designed a bimemristive chaotic circuit without inductance, revealing unique multistability characteristics through numerical simulation and hardware implementation [
13]. In 2020, Escalante-González et al. developed a class of equilibrium-free systems that exhibit convolutional attractors and vector fields that are differentiable, constructing higher-order hyperchaotic systems through a special coupling mechanism while maintaining equilibrium-free properties. Tools such as the Lyapunov exponential, the Kaplan–Yorke dimension and the Poincaré cross-section were used to numerically investigate the nine-dimensional system, demonstrating the potential and flexibility of the method in generating complex dynamical behaviors [
14]. In 2021, Li et al. designed general mathematical models of a voltage-controlled memristor, a charge-controlled memory vessel and a magnetron mempanic, respectively. They derived a five-dimensional memory hyperchaotic system after simple parallel connection of the three designed memory elements, which employs a novel “walnut-shaped” hyperchaotic attractor with three positive Lyapunov exponents and exhibits dynamic behavior with regard to parameter symmetry [
15]. In 2021, Caldarola et al. studied the chaotic behavior in Chua oscillators and Chua circuits with memristors using the super-trackline method. By varying the control parameters of the circuits, bifurcation maps were obtained, and the super-trackline functions associated with these bifurcation maps were computed by numerical integration using the Lunger–Kutta method. Their study demonstrates the effectiveness of the super-trackline method in analyzing memristive chaotic systems and provides a new perspective for understanding the dynamical behavior of such systems [
16]. Therefore, this paper uses magnetically controlled memristors to construct high-dimensional chaotic systems, generating richer dynamic behaviors to solve the above problems.
In recent years, multistability has become an important research object in memristive chaotic systems [
17,
18]. Multistability and super-multistability have become an important research direction in chaos-related fields. Multistability means that when the system parameters are fixed, the system can present many different stable states under different initial conditions, such as point attractors, periodic states, quasi-periodic states and chaotic states. These different stable states are called coexisting attractors of the system. Super-multistability is the extreme case of multistability, where the system can present the phenomenon of an infinite number of coexisting attractors under fixed parameters due to a change in the initial conditions. This phenomenon is usually associated with some special structures or nonlinear properties of the system, such as the introduction of nonlinear components and memristors. Systems with super-multistability exhibit great richness and complexity in their dynamical behavior and are extremely sensitive to the initial conditions. Although there have been many reports on the multistability and super-multistability of memristive chaotic systems, most of the papers have studied the heterogeneous multistability of chaotic systems, and few have reported on homogeneous multistability. Heterogeneous multistability refers to the fact that a chaotic system has a variety of chaotic attractors with different structures under the same system parameters. Homogeneous multistability, on the other hand, refers to the fact that chaotic systems can produce attractors with different amplitudes and spatial positions but with the same structure [
19].
In 2017, Zhou introduced a smooth magnetron memristor based on a pseudo-four-wing chaotic system and transformed it into a wing-variable chaotic system, which could generate two-wing, three-wing and four-wing chaotic attractors as well as four-wing hyperchaotic attractors and coexisting two-wing attractors [
20]. In 2019, Atefeh et al. proposed a five-dimensional chaotic system with super-multistability, which had a curvilinear line equilibrium point that could generate an infinite number of coexisting attractors with super-multistability [
21]. In the same year, Yuan proposed a three-order memristive chaotic system with a minimal structure, in which the hidden attractors exhibited homogeneous multistability, heterogeneous multistability and super-multistability [
22]. In 2020, Kengne et al. constructed a series of asymmetric chaotic circuits and revealed a variety of asymmetric coexistence bifurcation behaviors induced by asymmetric circuits through numerical simulations and hardware circuit implementation; they observed a variety of different types of asymmetric coexistence attractors [
23]. In 2021, Gu et al. proposed a fractional-order conservative chaotic system with no equilibrium points, and the theoretical analysis and numerical simulations revealed the hidden super-multistable phenomenon caused by the initial shifts in three dynamical characteristics, including chaos, quasi-periodic and period [
24].
Chaotic synchronization refers to the process by which two or more chaotic systems are controlled by internal coupling or external inputs so that the system motion state eventually reaches consistent dynamic states under different initial states. Chaos synchronization is an important part of chaos research, from theory to practical application, and the theory of synchronization has been widely employed in practical engineering fields such as communications, laser networks, chemical reactions, biological systems, mechanical systems and robotics. Therefore, the exploration of the investigating of chaotic synchronization has become an important topic in the study of chaos. In 2018, Zheng et al. extended the finite-time theory of fractional-order systems to hidden attractor chaotic systems, successfully realizing the self-synchronous control of the system [
25]. In 2020, Rashidnejad et al. studied the synchronization problem of chaotic systems with uncertain parameters by using finite-time fractional adaptive sliding-mode control technology [
26]. In 2021, Zheng et al. used Lyapunov’s stability theory and adaptive control method to study synchronization between uncertain chaotic systems of high-dimensionally mismatched systems [
27]. In 2022, Qu et al. constructed a chaotic synchronization system and a secure communication model based on the synchronous control theory and realized experiments of memristive chaotic synchronization and chaotic encryption/decryption circuits through hardware experiments; the experimental results confirmed that the circuit had the advantages of high reliability and robustness [
28].
Chaos is used for information encryption in two primary approaches: The first involves confidential communication based on chaotic modulation. The second involves cryptographic applications based on chaotic mapping. Chaotic secure communication techniques can be categorized into three groups based on different modulation methods: chaos masking [
29], chaos modulation [
30] and chaos shift keying [
31]. Liu et al. implemented the projection synchronization of the two systems and further designed a new chaotic communication scheme, which encrypts the message by means of chaos masking. The sending signal is the derivative of the product of the plaintext message and the chaotic signal, which contains an arbitrary complex calibration function and makes the sending signal possess higher complexity [
32]. In 2020, Khan et al. investigated a new 4D fractional-order chaotic system by constructing nonlinear control inputs to achieve staggered-phase synchronization and inverse-phase synchronization with its parallel system; based on this, the staggered-phase synchronization in the parallel system was exploited to mask the encryption of the plaintext analog sequences using the three-dimensional sequences [
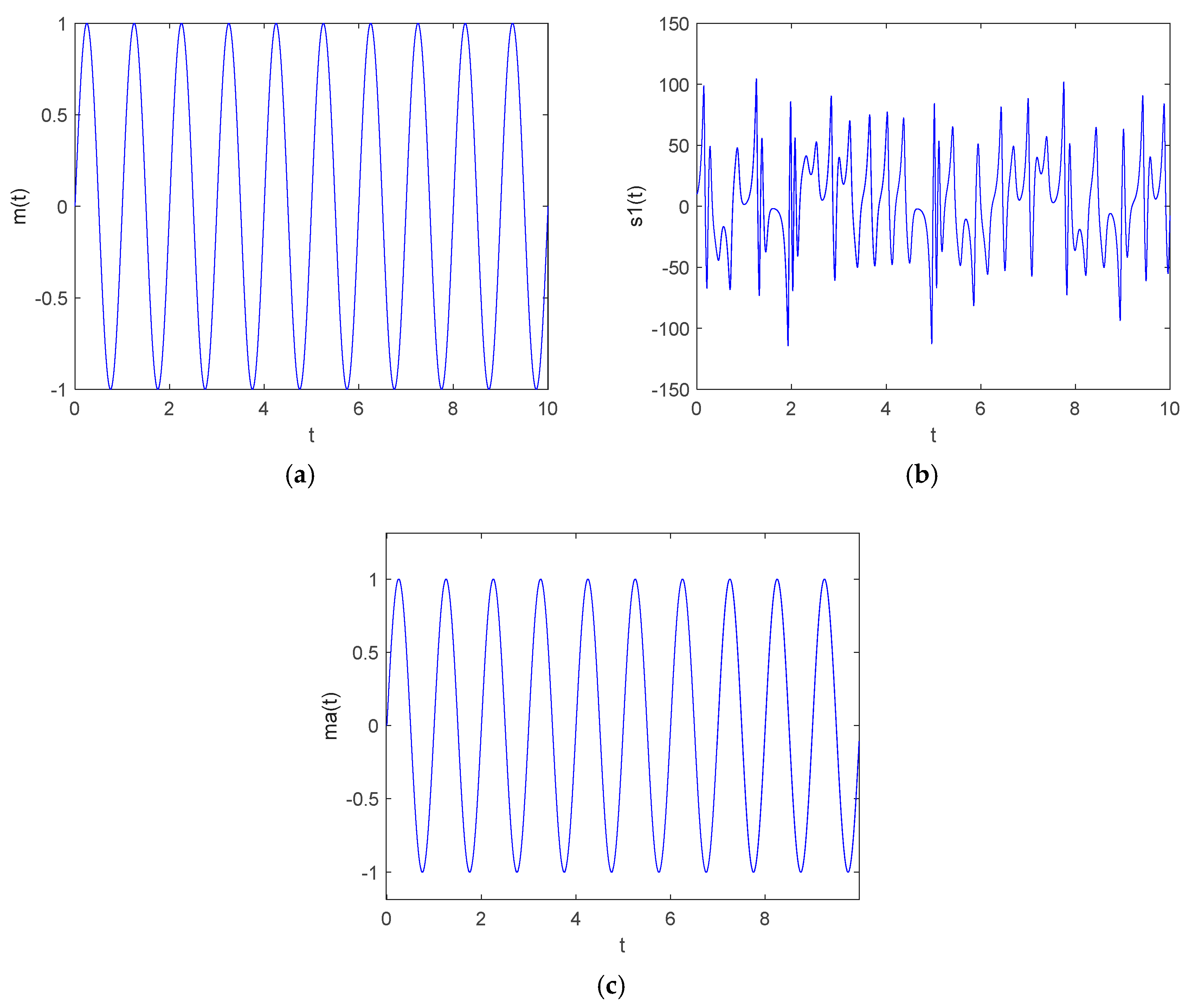
33]. So, this paper is built upon the realization of chaotic synchronization; the encryption and decryption of sinusoidal signals are realized by the methods of chaotic masking.
Therefore, a five-dimensional memristive chaotic system with homogeneous multistability, heterogeneous multistability and super-multistability coexistence is constructed in this paper. Firstly, Lyapunov exponential diagrams, bifurcation diagrams and phase portraits are used, and the phenomenon of super-multistability controlled by parameter and initial value variation is analyzed. Secondly, the bidirectional offset increment is investigated by introducing two offset constants, and the complexity of the system is also analyzed; the experimental results show that the system has a high complexity, and the feasibility of the system is verified by building a simulation circuit using Multisim. Finally, through the method of adaptive synchronization, an adaptive synchronization controller is designed, the drive system and the response system are synchronized and the application of secure communications is realized.
The rest of the paper is organized as follows.
Section 2 constructs a five-dimensional chaotic system based on a magnetically controlled memristor; the system is verified as a chaotic system by a combination of theory and experiments, and the basic dynamic characteristics of the chaotic system are analyzed.
Section 3 explores the influence of system parameters and memristive parameters on the dynamics of chaotic systems and explores the influence of the initial value of the memristor on the transient attractors. These investigations demonstrate that the system parameters have strong sensitivity and can be better applied to image encryption or secure communication.
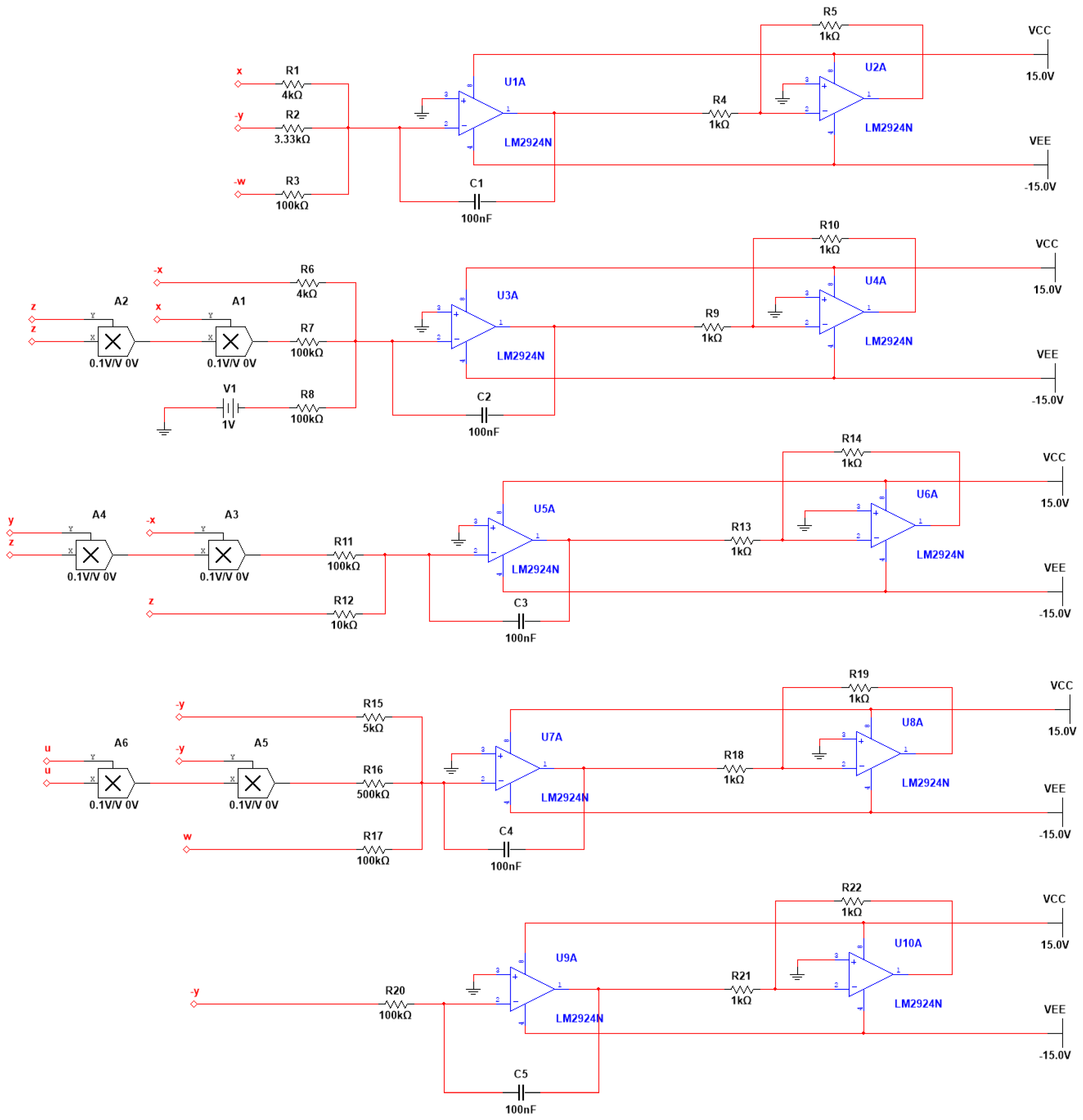
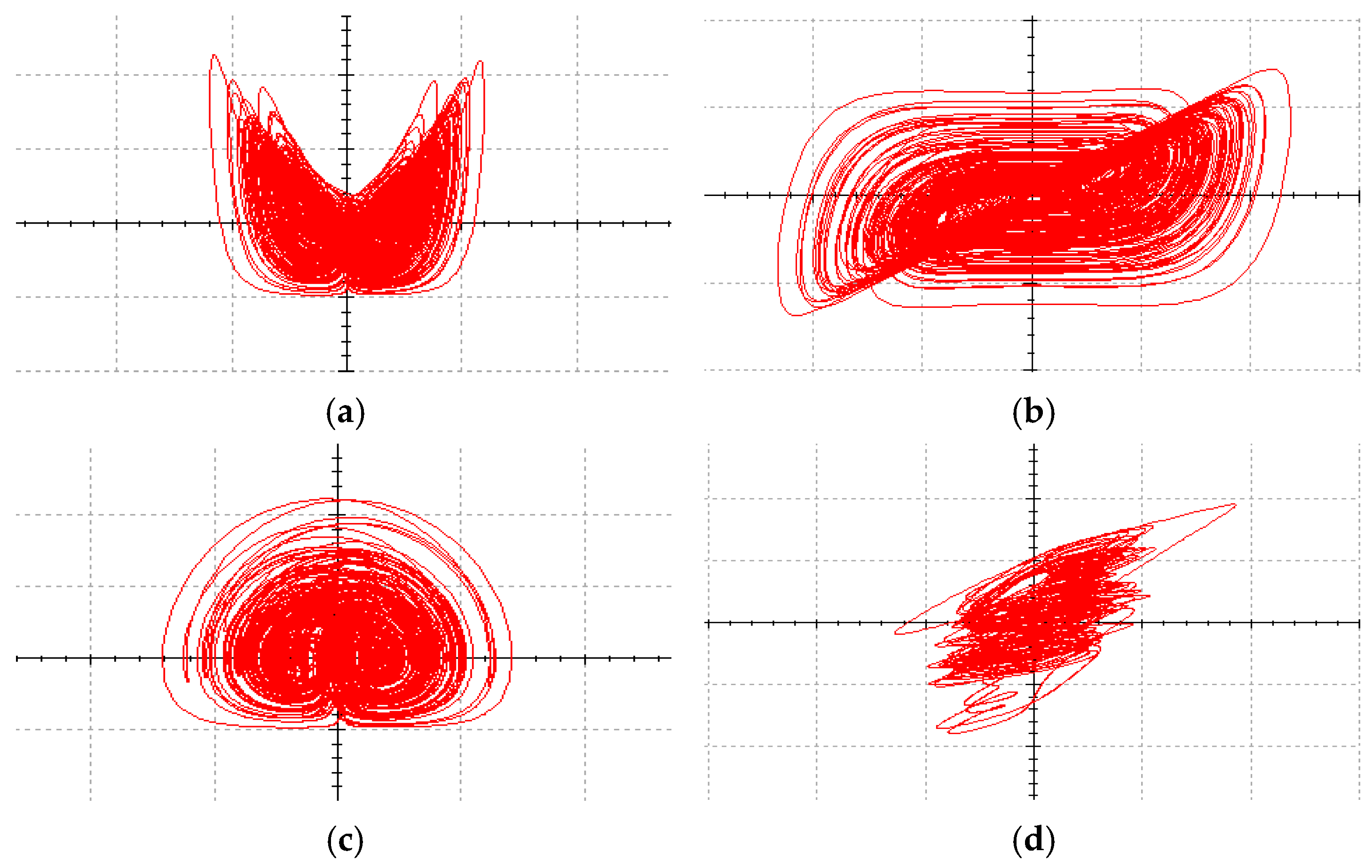
Section 4 uses the Multisim circuit implementation to simulate the chaotic system, and the phase portraits of the system are observed through a simulated oscilloscope, which verifies the correctness of the chaotic system.
Section 5 uses the adaptive control method to realize the synchronous control of two chaotic systems with the same structure, and the application of chaotic system synchronization in secure communication is realized.
Section 6 summarizes the work of this paper and provides a future outlook.
3. Multistability Analysis of Memristive Chaotic System
In this section, the stability of a chaotic system is analyzed using the Lyapunov exponent, and the dynamic behavior of the system is visualized through a bifurcation diagram. The Lyapunov exponent is a key parameter that accurately quantifies the average exponential divergence of adjacent trajectories in the phase space of a chaotic system, and it serves as a key indicator to evaluate the sensitivity of the system to the initial conditions [
38]. Determining the state of chaos by the Lyapunov exponential method is a form of quantitative analysis.
The physical meaning of the Lyapunov exponent can be understood by assuming that the initial value is taken as a particularly small
-dimensional sphere, which eventually changes to an ellipsoid as the dynamical behavior changes. In this process, all principal axes of the ellipsoid are ranked from the fastest to slowest rate of change, and the
ith Lyapunov exponent is defined according to the
ith principal axis rate of change.
When analyzing the dynamic behavior of chaotic systems, the state of the system can be evaluated by ranking the system’s Lyapunov exponents from high to low. The sign of the Lyapunov exponent characterizes the stability of the system. When the Lyapunov exponent is negative, the system is in a periodic state and has stable dynamic behavior. Conversely, when the Lyapunov exponent is positive, the system exhibits chaotic properties, and the system exhibits an unstable state. When the Lyapunov exponent is exactly zero, the system is on the boundary between stability and instability in a critical state.
A bifurcation diagram describes the state of a system as a certain system parameter or initial value changes. By looking at a bifurcation diagram, it is possible to determine whether a system is in a chaotic state or some other state, revealing the effect of a parameter or initial value on the state of the system.
Therefore, by fixing the other parameters, the data variations in the Lyapunov exponent spectrum and bifurcation diagram in different ranges of the system parameter , memristive initial conditions and other initial conditions , respectively, are analyzed to investigate the complex dynamic properties of the system.
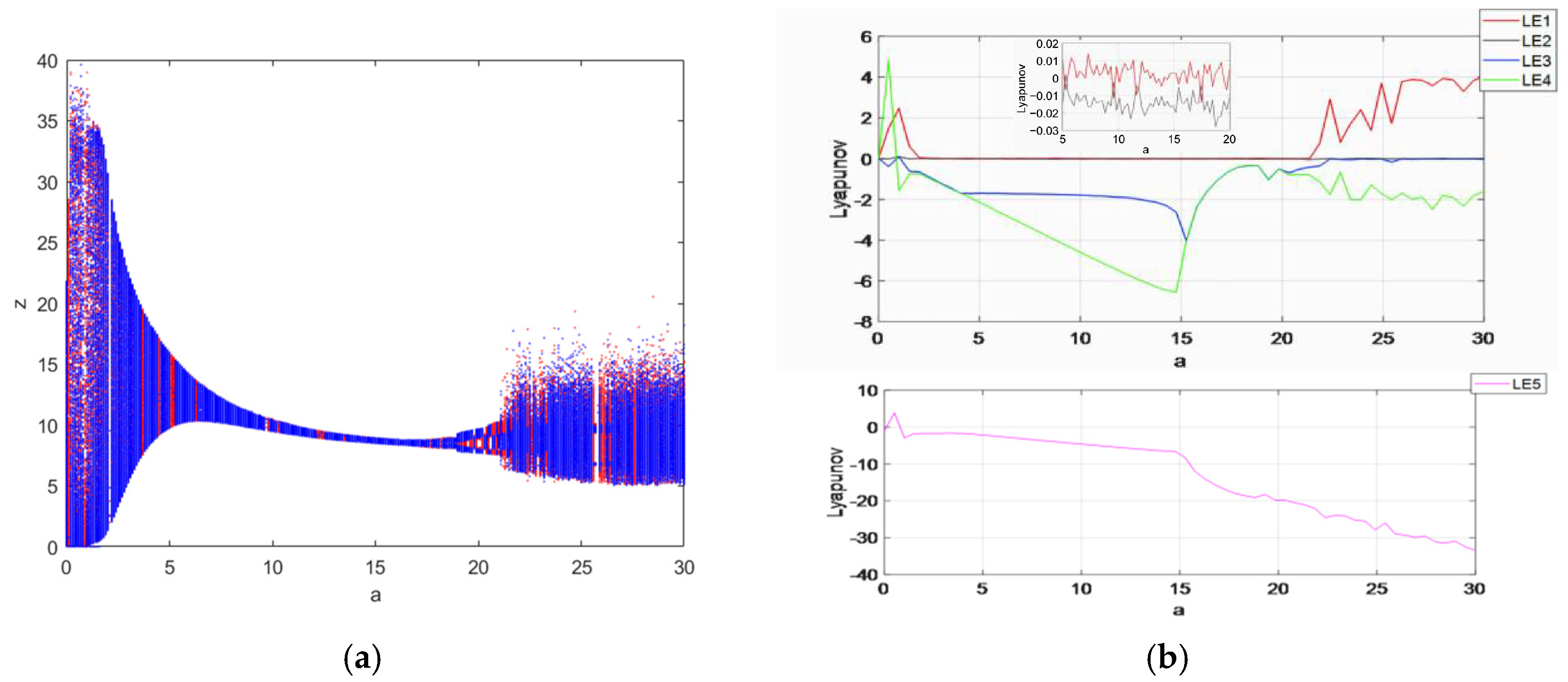
3.1. Symmetric Coexistence Attractors Dependent on Parameter
The symmetric coexistence properties of system (3) with parameter
are investigated in this section through means of bifurcation diagrams and a Lyapunov exponential diagram. Let parameter
be a variable control parameter with
,
,
,
,
and
, where the initial condition is (1, 1, 1, 1, 1)(blue) and (−1,(−1, 1,(−1,(−1)(red), the fixed step time is 0.01 s and the total duration is
. The value of the Lyapunov exponent is calculated by the fourth-order Runge–Kutta method and the wolf algorithm, and the size of the value obtained by the different sampling points taken during the experiment is also different, which also depends on the performance of the computer. By obtaining as many sampling points as possible under the condition of ensuring that the computer can run and improving the accuracy of the value, the number of points taken from the Lyapunov exponent is 600, and the number of points taken from the bifurcation diagram is also 600; the obtained image is shown in
Figure 6. The bifurcation diagram of the system state variables
within the parameter
[0,30] is shown in
Figure 6a, and the Lyapunov exponential diagram is shown in
Figure 6b. From the figure, it can be seen that the system goes through two different states, changing from periodic to chaotic: when
[0,6],
[7,10],
[12.7,17.2] and
[17.8,30], the system is in a chaotic state; when
[6,7],
[10,12.7] and
[17.2,17.8], the system is in a periodic state.
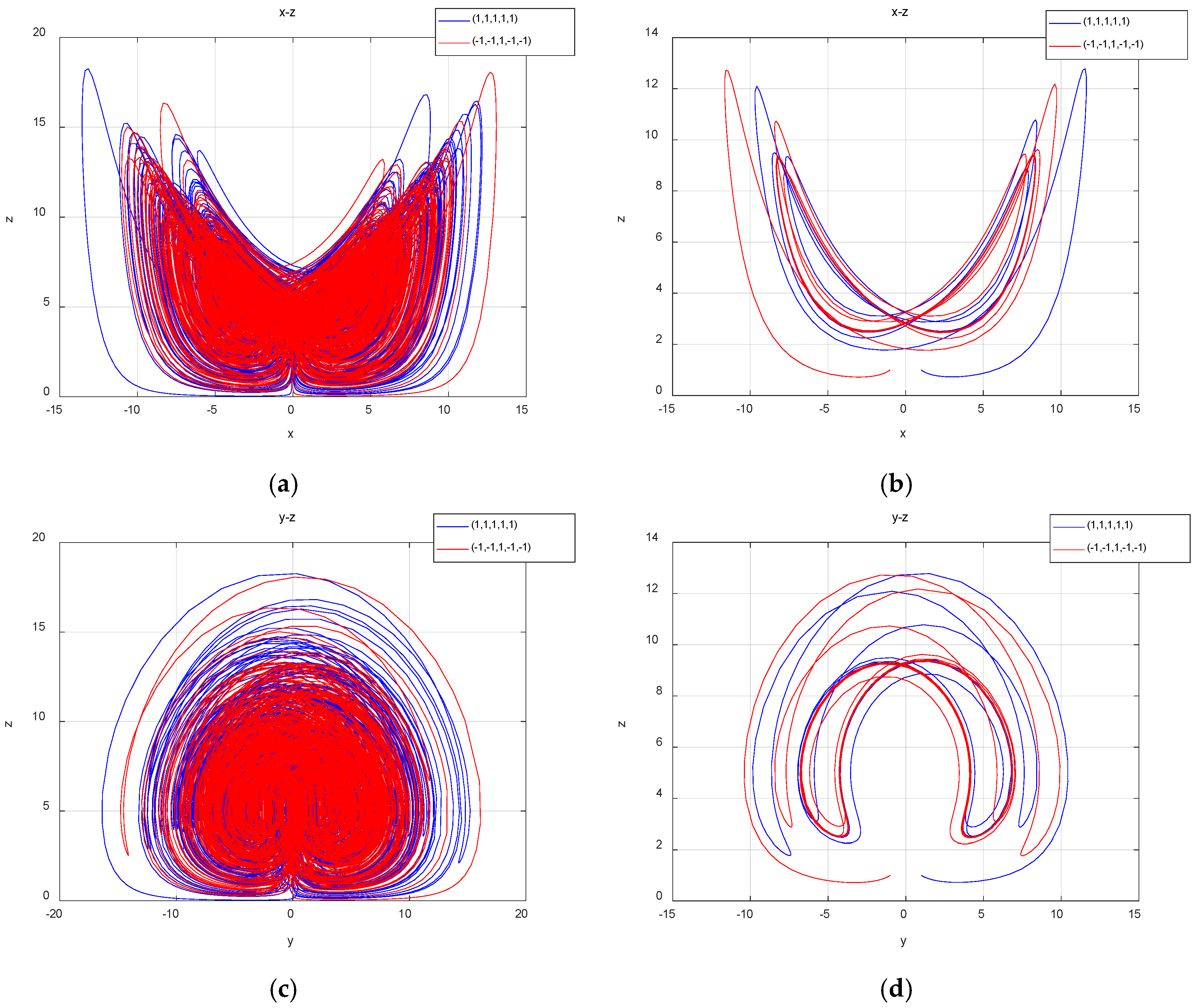
The coexistence attractors with two different initial values were simulated with parameter
of 25 and 12.7; the coexistence attractors of period 4 and chaos were obtained. The chaotic attractors are shown in
Figure 7a, the periodic attractors are shown in
Figure 7b, the chaotic attractors are shown in
Figure 7c and the periodic attractors are shown in
Figure 7d.
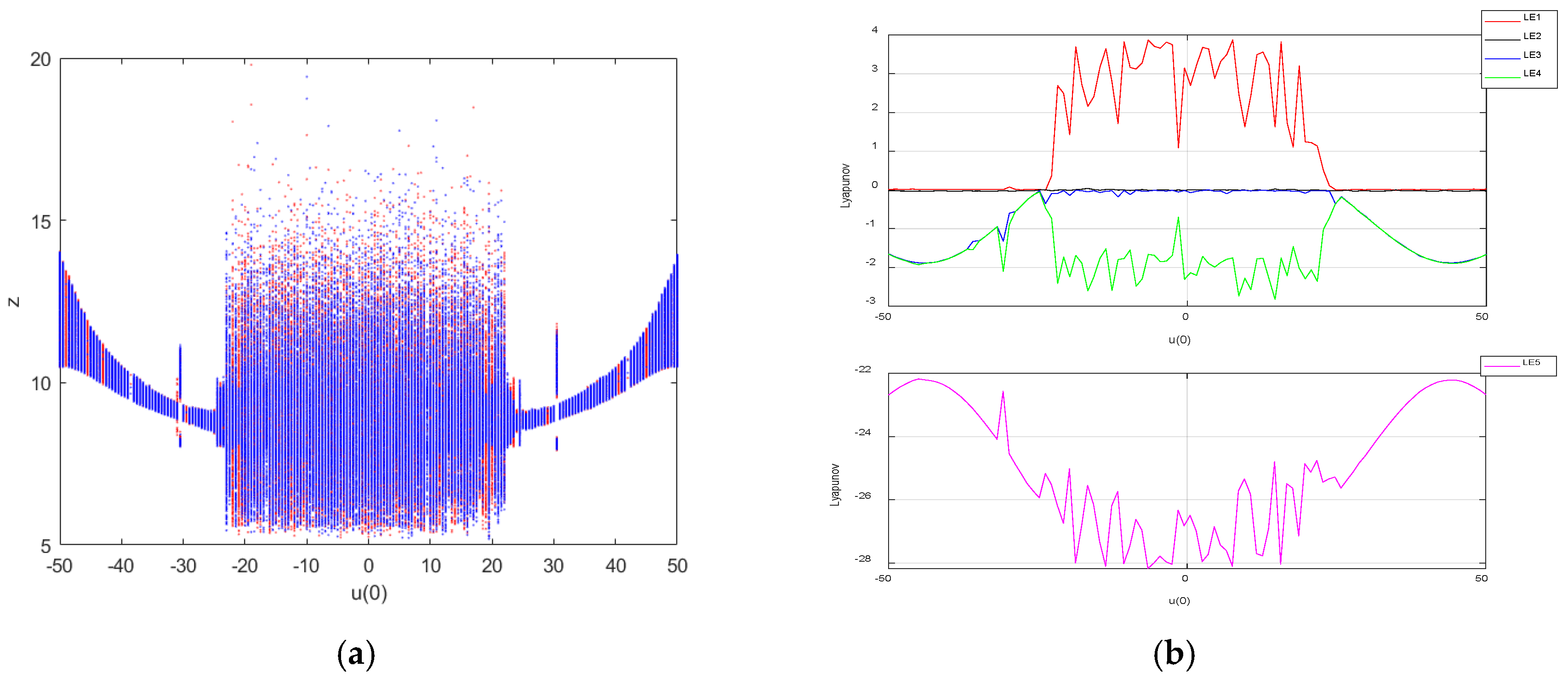
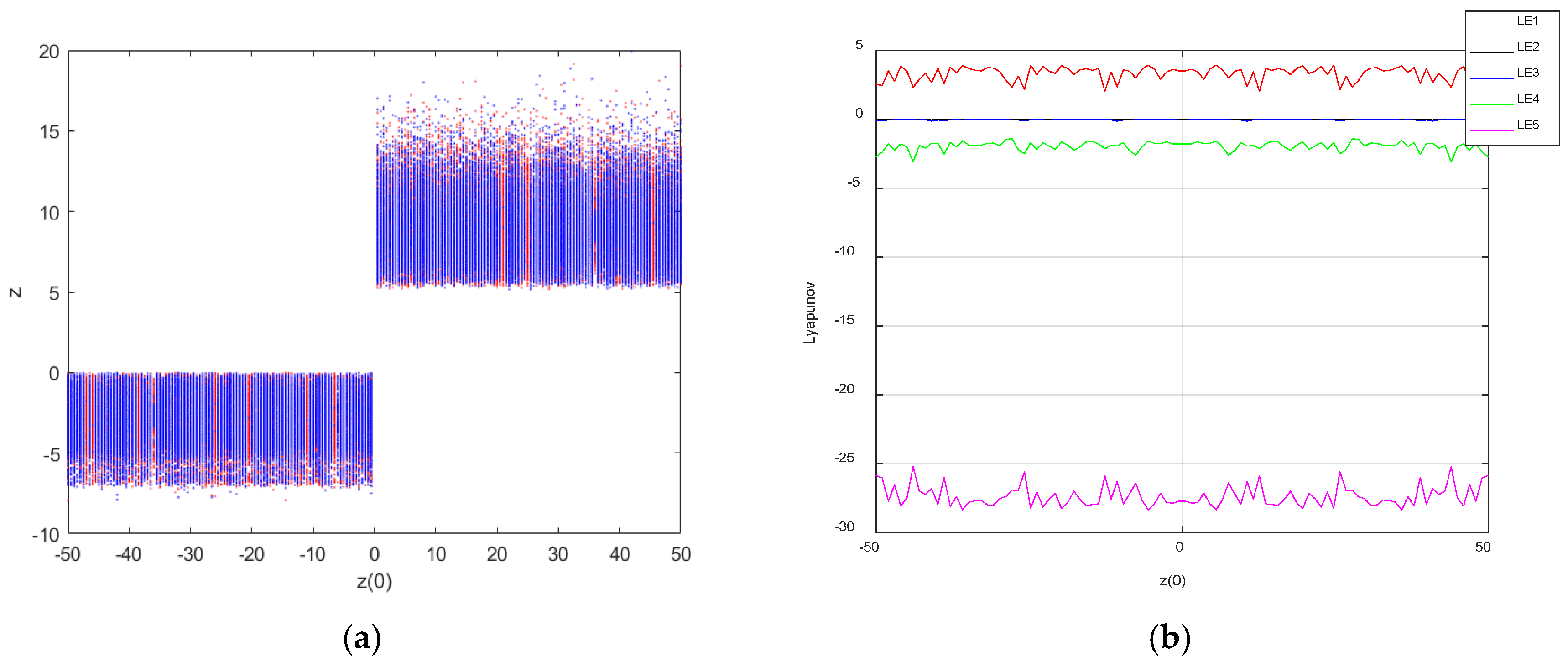
3.2. Analysis of Symmetric Super-Multistability Dependent on Memristive Initial Conditions
Keeping the values of the system parameters as
,
,
,
,
,
and
, the initial conditions of the system were set to be
= (1,1,1,1,
) and
= (−1,−1,1,−1,
), where
is the initial state of the memristor and was set as the bifurcation parameter. The Lyapunov exponent diagram was sampled at 600 points and the bifurcation diagram at 600 points, and the coexistence bifurcation diagrams arising from the initial conditions
(blue) and
(red) when the initial value of the memristor
was varied in the interval [−50,50] are shown in
Figure 8a, and the Lyapunov exponent diagram is shown in
Figure 8b.
When [−23.7,−22.7], [26.7,27.7], [34.8,35.8] and [42.9,43.9], the system was in a periodic state; when [−50,−23.7], [−22.7,26.7], [27.7,34.8], [35.8,42.9] and [43.9,50], the system was in a chaotic state, sometimes in a hyperchaotic state. The analysis shows that the system can exhibit the super-multistability property of the coexistence of an infinite number of attractors under both sets of initial conditions, which is a special nonlinear dynamical phenomenon.
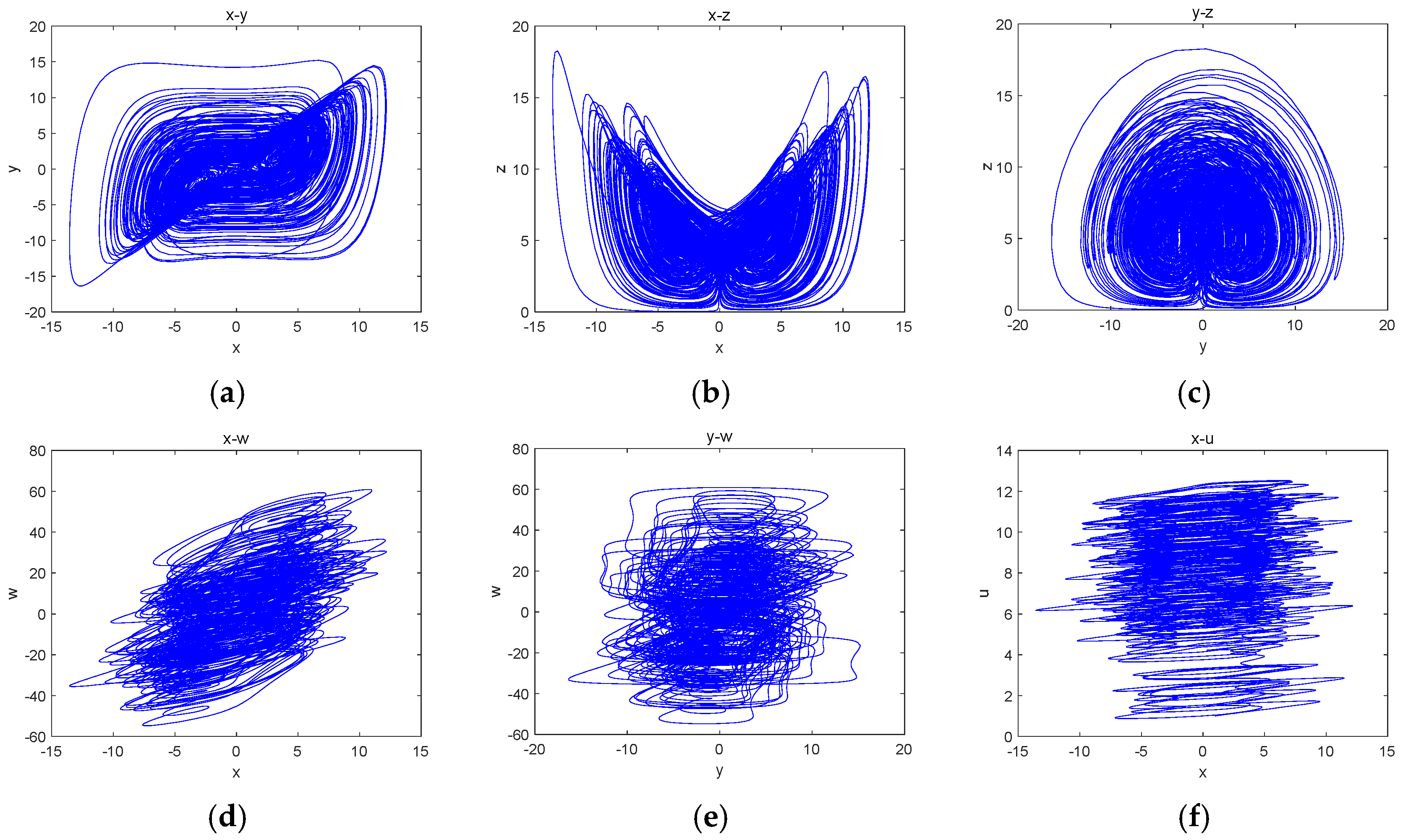
In order to further reveal this unique super-multistability characteristic, when the initial
of the memristor equals −45, −35, −25, 1, 25, 35 and 45 respectively, the projection plots of the coexisting attractors in different spaces or planes are shown in
Figure 9. In addition, when more initial states are selected, the system can exhibit the super-multistability phenomenon, in which an infinite number of attractors coexist.
The parameters were set as above, and the initial values were set as (1,1,1,1,
); when
was taken as 60, 30, 15, 1,(−15,(−30 and –60 respectively, the system generated two-vortex and four-vortex chaotic attractors, as shown in
Figure 10. This corresponds to the red, green, pink, blue, yellow, cyan and black chaotic attractors, respectively. It can be observed that these chaotic attractors showed a linear distribution along the
-axis, which is consistent with the results of the previous analysis of the system bifurcation diagram. Through the above analysis, it can be found that the system can produce chaotic attractors with different structures, so the system has heterogeneous multistability, there are infinitely many coexisting attractors and the system behaves as a super-multistability system.
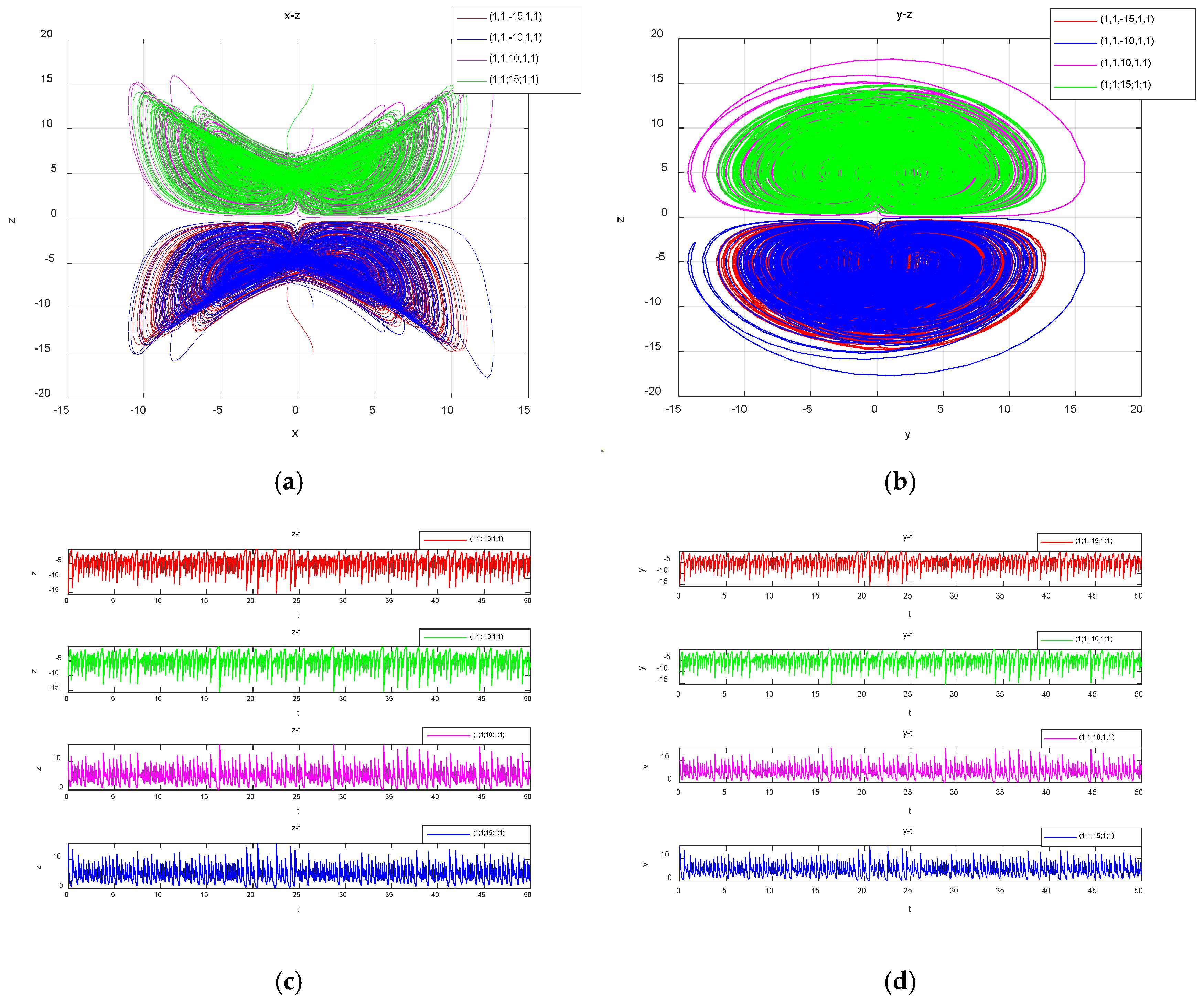
3.3. Super-Multistability Analysis Dependent on the Other Initial Value
Let parameter
be a variable control parameter; when
,
,
,
,
,
and
, the initial condition was
= (1,1,
,1,1) and
= (−1,−1,
,−1,−1). The Lyapunov exponent spectrum was sampled at 500 points and the bifurcation diagram at 500 points, and the coexistence bifurcation diagram was drawn for the initial condition
[−50,50]; the Lyapunov exponent spectrum is shown in
Figure 11. Infinitely many chaotic states are exhibited on the bifurcation diagram in the range of
[−50,50]. It is further conjectured that system (3) relying on the initial condition
may also generate an infinite number of hidden coexisting attractors; it has hidden super-multistability.
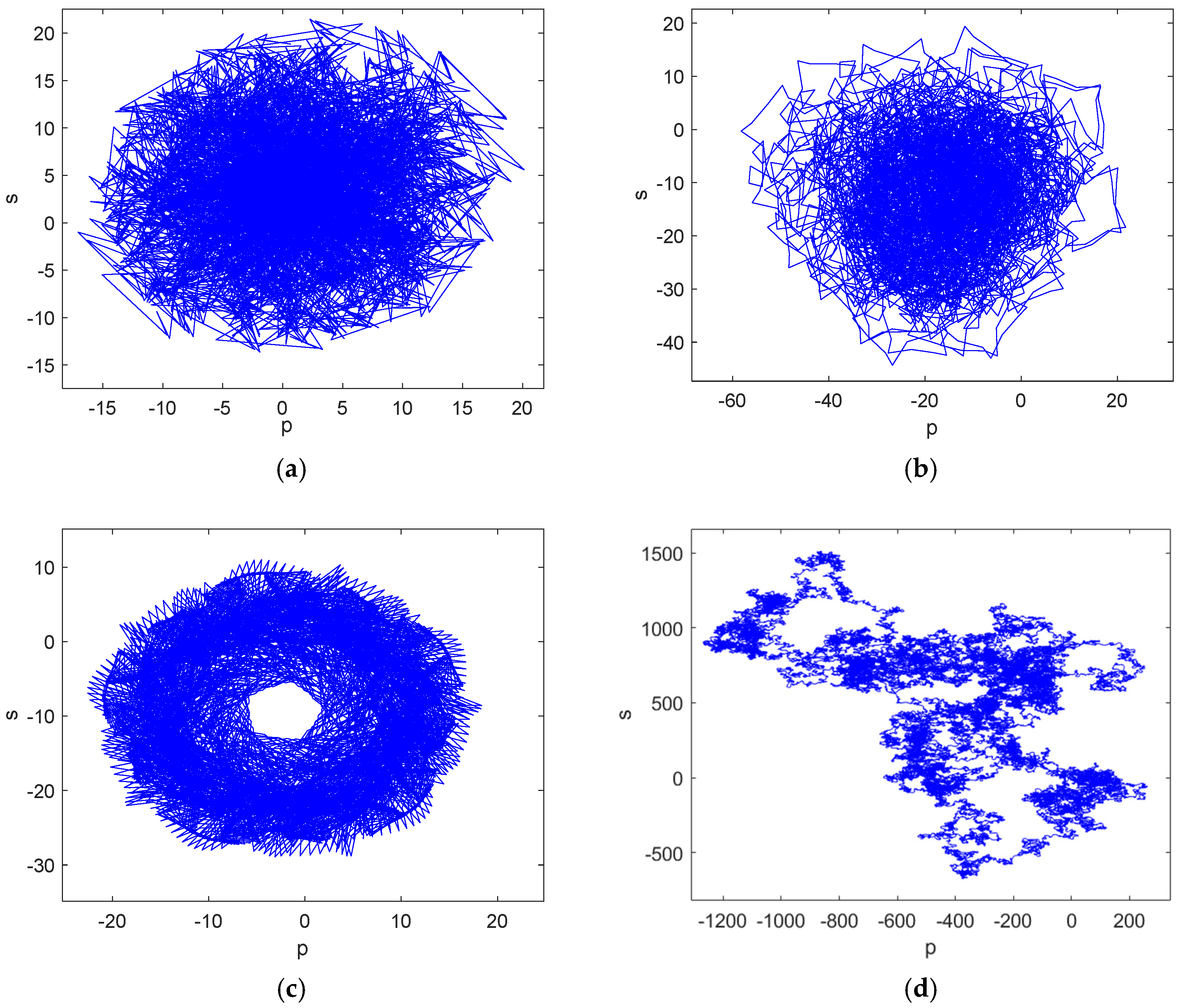
Taking
−15, −10, 10 and 15, the corresponding attractors are represented by four colors, red, blue, pink and green respectively; the obtained double-vortex chaotic coexisting attractors and time-domain waveforms in symmetric coordinates are shown in
Figure 12.
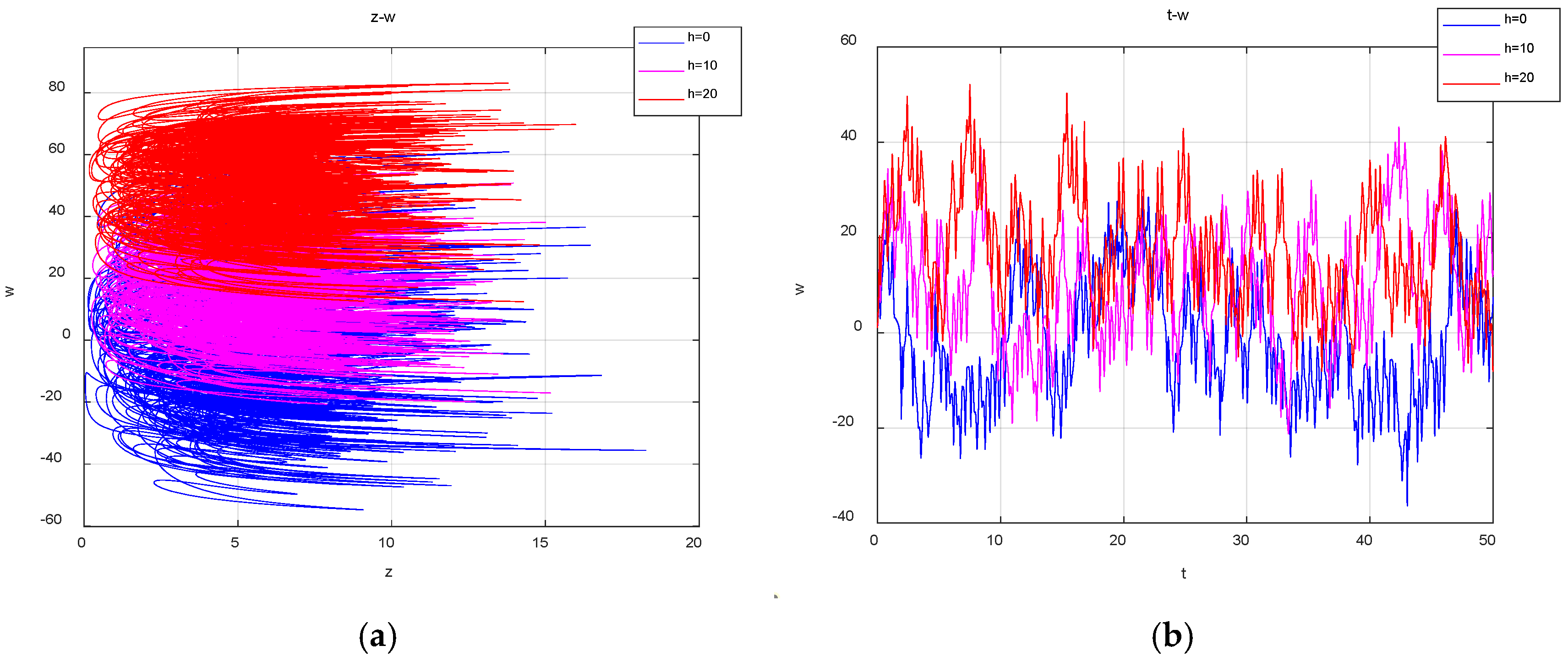
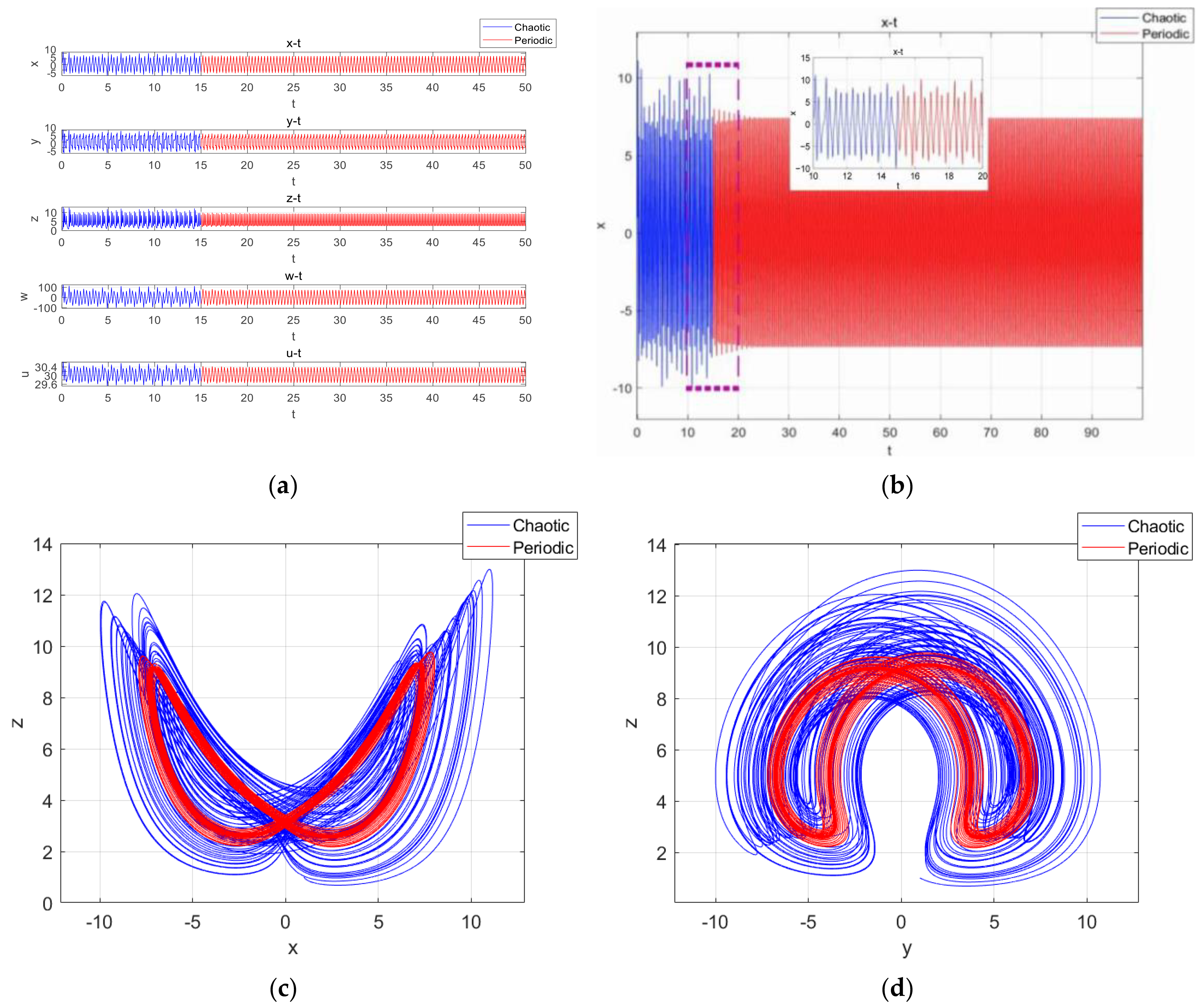
3.4. Effect of the Initial Value of the Memristive on the Transient Attractors
Transient chaos is a dynamic process in which a system is chaotic for a period of time but evolves into another continuous chaotic or periodic state over time [
39,
40,
41]. The system behaves chaotically for a shorter period of time and enters a periodic behavior after a period of time. The transient chaos and transfer phenomena of the system (3) dependent on the amnesic initial conditions are discussed below.
Fixing the parameters as
,
,
,
,
,
and
, with the initial condition being (1,1,1,1,
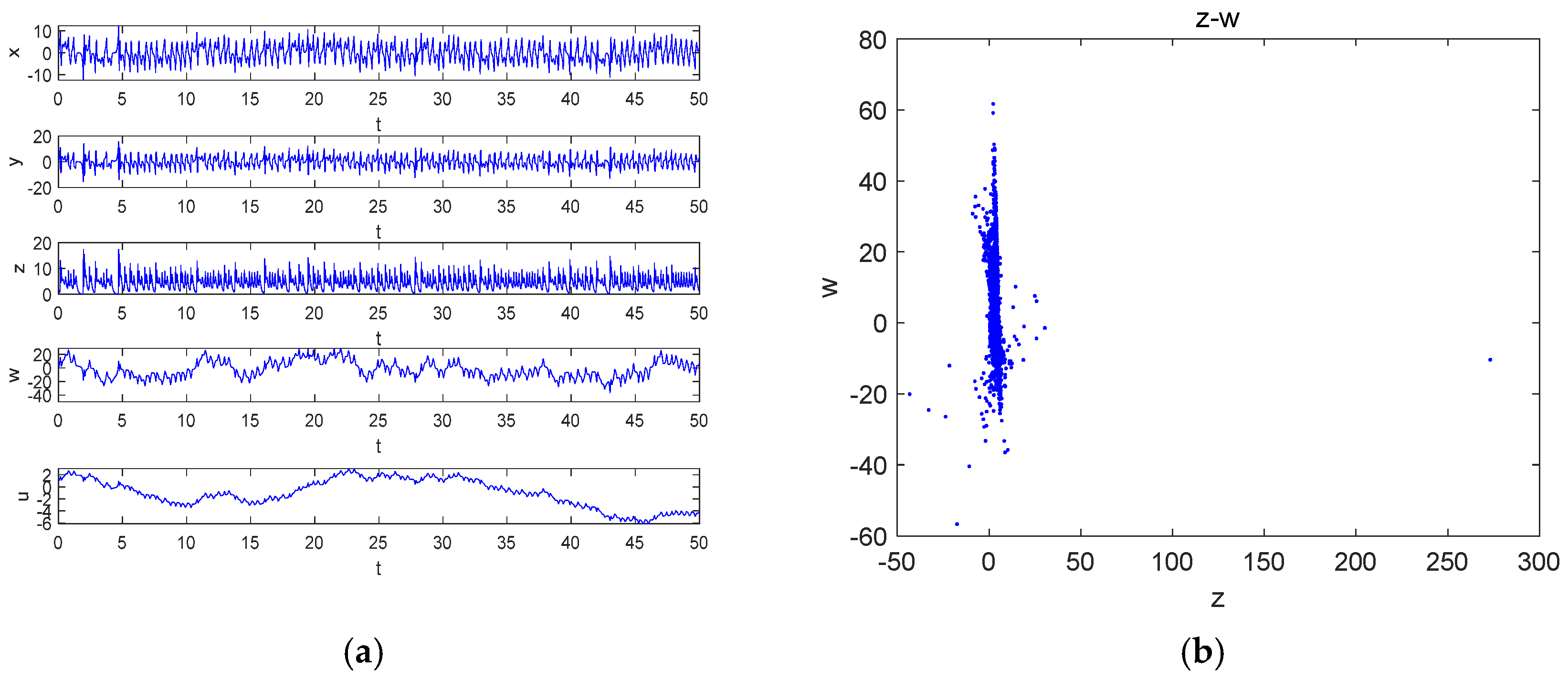
), the simulation time was set to [0,50], and the step size was 0.01. With
, the time series of
,
,
,
and
are shown in
Figure 13a. Among them, the timing diagram of variable
is shown in
Figure 13b, with the simulation time being 0–100. When
, the time-domain waveforms of the system were transformed from disorganized to regular and orderly, so the system underwent a state transfer at this time. The
phase diagram of the motion trajectories in
(0,15] and
(15,50] is shown in
Figure 13c, and the
phase diagram of the motion trajectories in
(0,15] and
(15,50] is shown in
Figure 13d.
Obviously, the system had attractors in the short time before and a periodic limit cycle in the longer time after . This confirms that the system had transient chaos under the corresponding parameters and initial conditions, and the state transfer behavior occurred near , where the blue color represents chaos and the red color represents the cycle.
Similarly, when
, the system underwent transfer behavior near
, exhibiting a chaotic state at
(0,7] and a periodic state at
(7,50]. The timing diagrams of the variables
,
,
,
and
are shown in
Figure 14a. The timing diagram of variable
is shown in
Figure 14b. The
phase diagram and the
phase diagram of the attractors are shown in
Figure 14c,d. The simulation results were similar to the previous case, but there was a significant shortening of the existence of transient chaos.
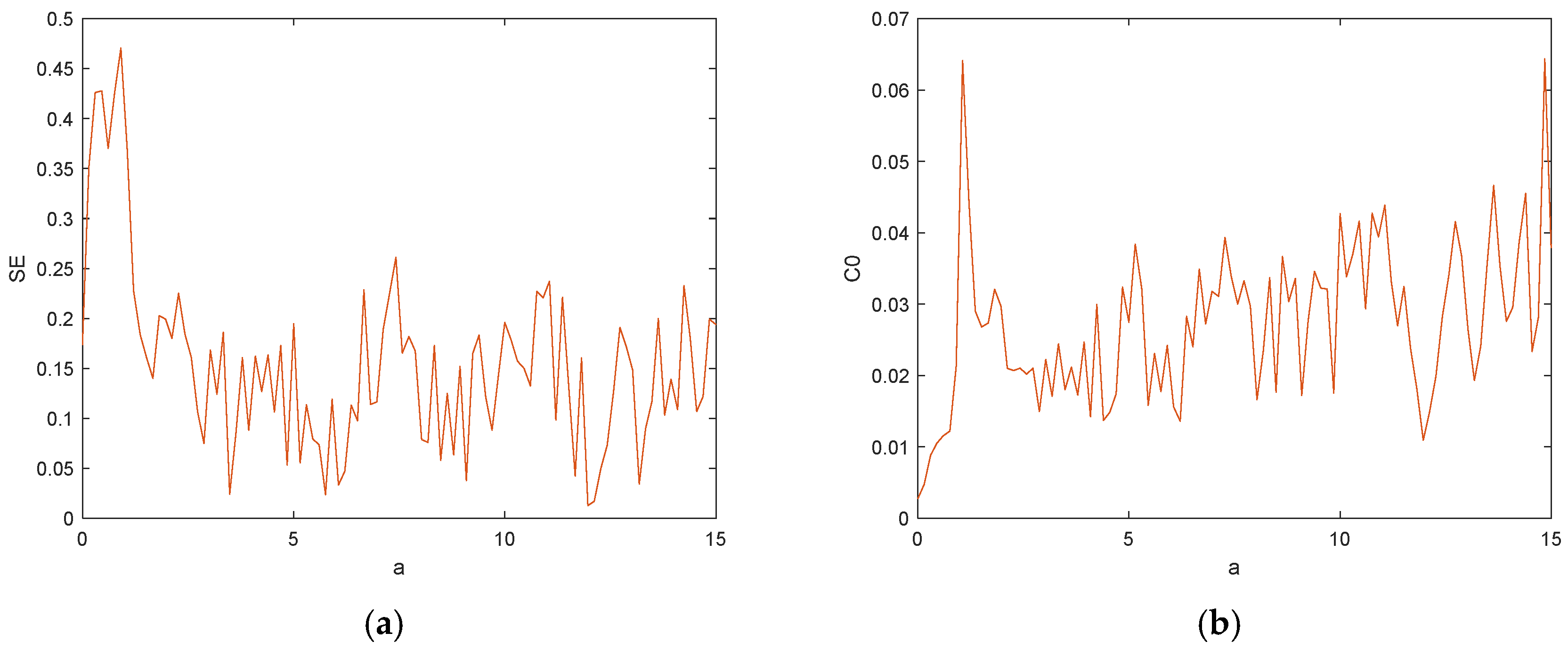
3.5. Complexity Analysis
The complexity of a chaotic system is often used to assess the stochastic properties of chaotic sequences. Higher complexity values indicate more random-like sequences, which are particularly valuable for security engineering applications. Currently, there are many algorithms for calculating the complexity of chaotic systems, most of which are based on the Kolmogorov complexity and Shannon entropy. In this paper, the SE algorithm based on the Fourier transform and the C0 algorithm based on the FFT transform are used. The spectral entropy algorithm mainly relies on the Fourier transform, which analyzes the energy distribution in the Fourier transform domain and combines it with the concept of Shannon’s entropy to calculate the spectral entropy value; the core of the C0 algorithm lies in the decomposition of the sequence into regular and irregular parts, and it focuses on the measurement of the proportion of the irregular part of the sequence, which leads to the corresponding results. The specific C0 complexity calculation process is shown as follows.
(1) The first step is to remove the irregular parts of the time series; the mean of the time series is shown in Equation (13).
The parameter
is set to retain the spectrum that exceeds a multiple of the mean value
, and the portion less than or equal to a multiple of the mean value
is set to zero.
(2) In the second step,
is Fourier-inverse-transformed, which is used to obtain Equation (15).
where
= 0, 1,…, N−1.
(3) The third step is to calculate the C0 complexity, and the formula for the C0 complexity is shown in Equation (16).
The system complexity measurement is of great significance for the analysis of chaotic system dynamics, and extensive studies have shown that the higher the complexity of chaotic systems, the more suitable they are for secure communication [
42]. The SE complexity reflects the disordered state of the Fourier transform domain, and the flatter the spectrum is, the larger its SE value is, which indicates that the complexity of the time series is higher [
43]. With the system parameters set as
,
,
,
,
,
and
, the initial condition (1, 1, 1, 1, 1) was selected, and
varied in the range of [0,15]; the complexities of SE and C0 of the calculation system are shown in
Figure 15.
The trend corresponds to the Lyapunov exponential diagram and the bifurcation diagram in
Figure 6. When the system was in a cycle, the corresponding values of SE and C0 were small, and the system complexity was low at this time. When the system was in a chaotic state, the corresponding SE and C0 values were larger, and the system complexity was higher. It can be seen that the system complexity was consistent with the trend of the Lyapunov exponential diagram and bifurcation diagram.
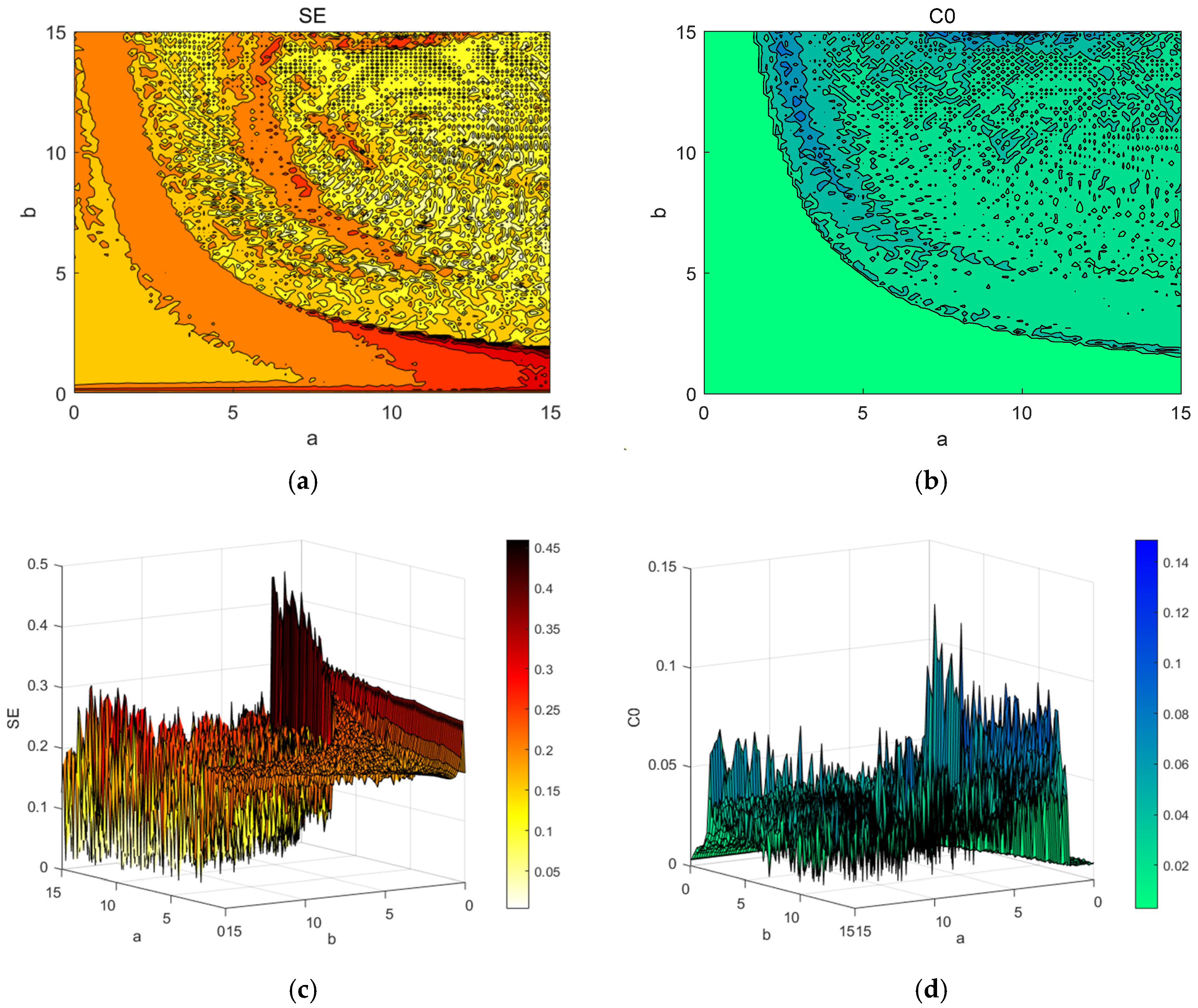
In practical applications, spectrograms of the SE and C0 complexity can provide a basis for better parameter selection. The two-dimensional planar complexity spectrograms and three-dimensional complexity spectrograms of SE and C0 for the two parameters
and
are plotted in
Figure 16. The darker the color is, the higher the complexity. In the field of secure communication, a higher complexity indicates greater randomness and a greater difficulty of sequence recovery. Therefore, in practical applications, the complexity of the chaotic system should be increased to ensure that the system has good anti-interference properties.
6. Conclusions
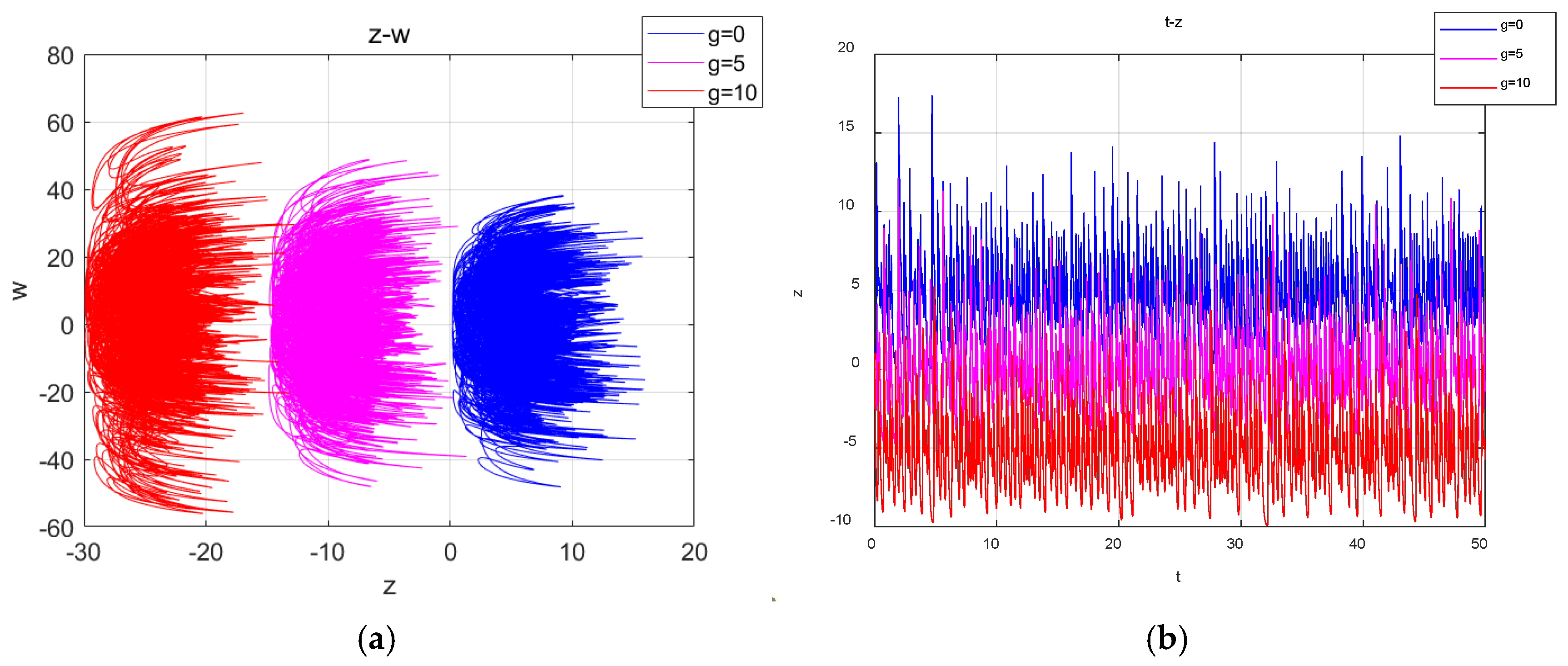
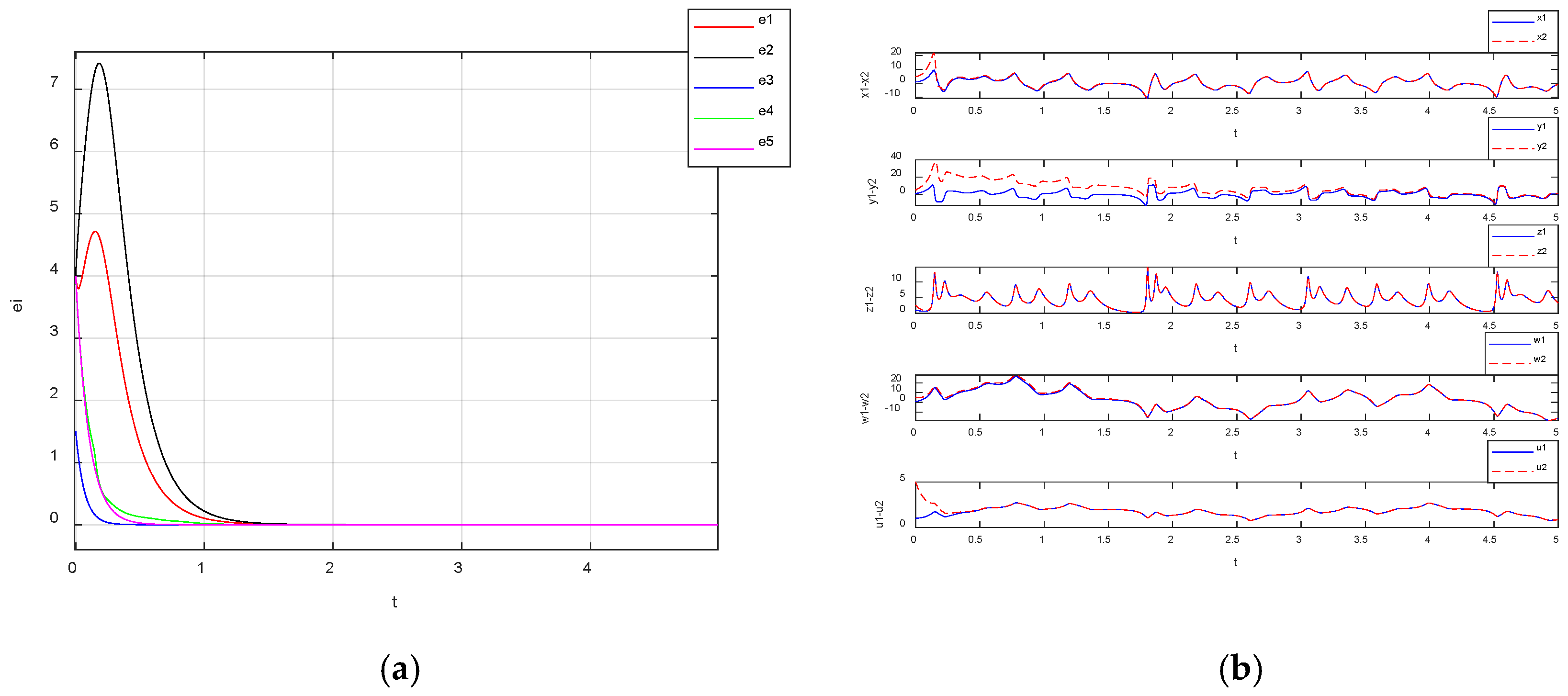
In this paper, a five-dimensional memristor chaotic system was innovatively constructed using a magnetically controlled memristor. Firstly, compared with the previous chaotic systems, the new system improved the complexity, and it exhibited strong sensitivity to parameter variations and initial conditions, so the multistability of the system was analyzed by means of a Lyapunov exponential diagram, bifurcation diagrams and phase portraits. Upon varying the system parameter , the initial state of the memristive component and other initial conditions, the experimental results show that the system exhibited a rich behavior of periodic chaotic alternation associated with the parameters, symmetric attractors, transient chaotic behaviors, homogeneous multistability, heterogeneous multistability and super-multistability phenomena. Secondly, two offsets, and , were introduced into the linear state variables of the system as the displacement controllers of the system in the -axis and -axis directions, respectively, and the effects of the offsets on the dynamical behavior of the system were analyzed. The complexity of the system was analyzed by using the SE algorithm and the C0 algorithm. The analysis results show that the values of the SE and the C0 algorithms increased with the increase in the complexity of the system, and the color of the three-dimensional spectrograms became darker. In addition, simulation experiments of the five-dimensional chaotic system were carried out using Multisim to verify the feasibility of the system design. Finally, this paper adopted adaptive synchronization and designed a corresponding adaptive synchronization controller. By adjusting the positive gain constant and setting the initial values of the driving and response systems to (1, 1, 1, 1, 1) and (5, 5, 2.5, 5, 5), respectively, synchronization between the driving system and the response system was achieved. Based on chaotic synchronization, the chaotic masking method was used to encrypt and decrypt a sinusoidal signal. In the future, this signal encryption scheme can continue to be optimized, and hardware implementation based on this encryption scheme can be realized, which can provide stronger support and expansion space for the development of communication security, data protection and privacy assurance.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}