

Beamforming Design for STAR-RIS-Assisted NOMA with Binary and Coupled Phase-Shifts

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Related Works
- High computational complexity: While an exhaustive search can achieve globally optimal solutions, they suffer from exponential complexity growth, making them impractical for large-scale scenarios.
- Performance degradation: Despite their computational efficiency, relaxation-based discretization techniques lack theoretical performance guarantees and might suffer from severe performance loss in low-resolution situations.
1.2. Contributions
- Development of an iterative optimization framework: This paper proposes an optimization framework to handle the coupling between variables in STAR-RIS-assisted NOMA systems, effectively balancing convergence speed and solution accuracy.
- Integration of FP and Nesterov’s extrapolation: During the active beamforming stage, we employ the FP algorithm to transform the original problem into a convex optimization problem, while simultaneously leveraging Nesterov’s extrapolation technique to reduce computational complexity. This approach ensures that the entire process maintains the convexity of the problem, while achieving efficient and stable beamforming optimization.
- Proposal of a binary phase design method: For the phase vector optimization problem of STAR-RISs, a binary phase design method with linear time complexity is proposed. This method reduces computational complexity and enhances feasibility by equivalently transforming the binary phase beamforming problem into a piecewise solution problem on the unit circle and deriving an optimal closed-form solution.
1.3. Organization
2. System Model and Problem Formulation
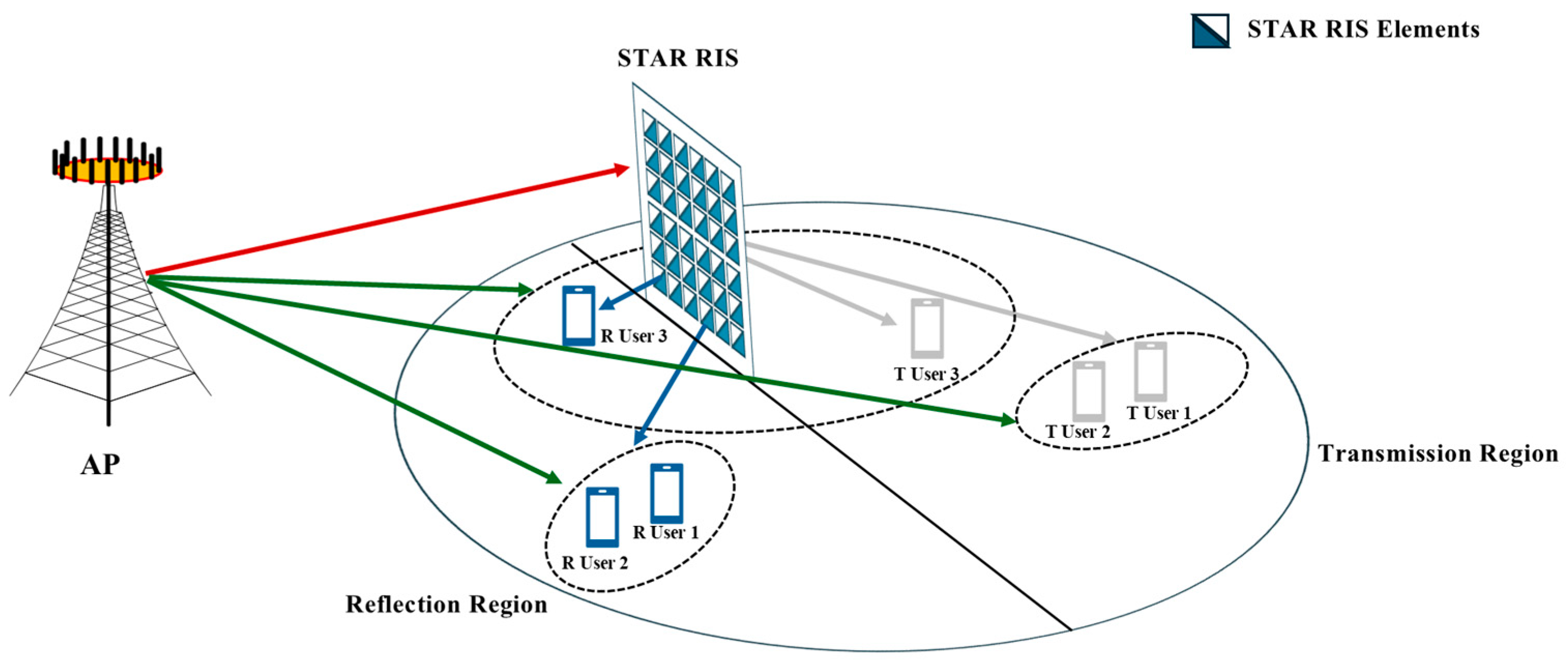
2.1. System Model
2.2. Mathematical Model of the System
- Non-convex objective function: The system sum-rate is a non-convex function due to the coupling between beamforming and STAR-RIS phase shifts, making it difficult to find the global optimum.
- Nonlinear constraints: Discrete phase shifts—practical hardware imposes discrete phase shifts, turning the problem into a mixed-integer optimization, which significantly increases computational complexity. Coupled phase shifts—passive STAR-RIS elements require orthogonal transmission and reflection phase shifts, , restricting the phase difference to or , introducing additional non-convexity and nonlinear equality constraints. The transmission and reflection coefficient constraints are non-convex because they define a unit circle, which is not a convex set.
3. Proposed Optimization Frameworks
3.1. Active Beamforming Optimization for STAR-RIS NOMA
| Algorithm 1: Iterative Framework for Active Beamforming Optimization |
| Input: channel vectors: Power allocation vectors: ; Noise variance: ; Maximum iteration times: ; Convergence threshold: . Output: Optimal precoding vectors: ;
|
3.2. Passive Beamforming Optimization for STAR-RIS NOMA
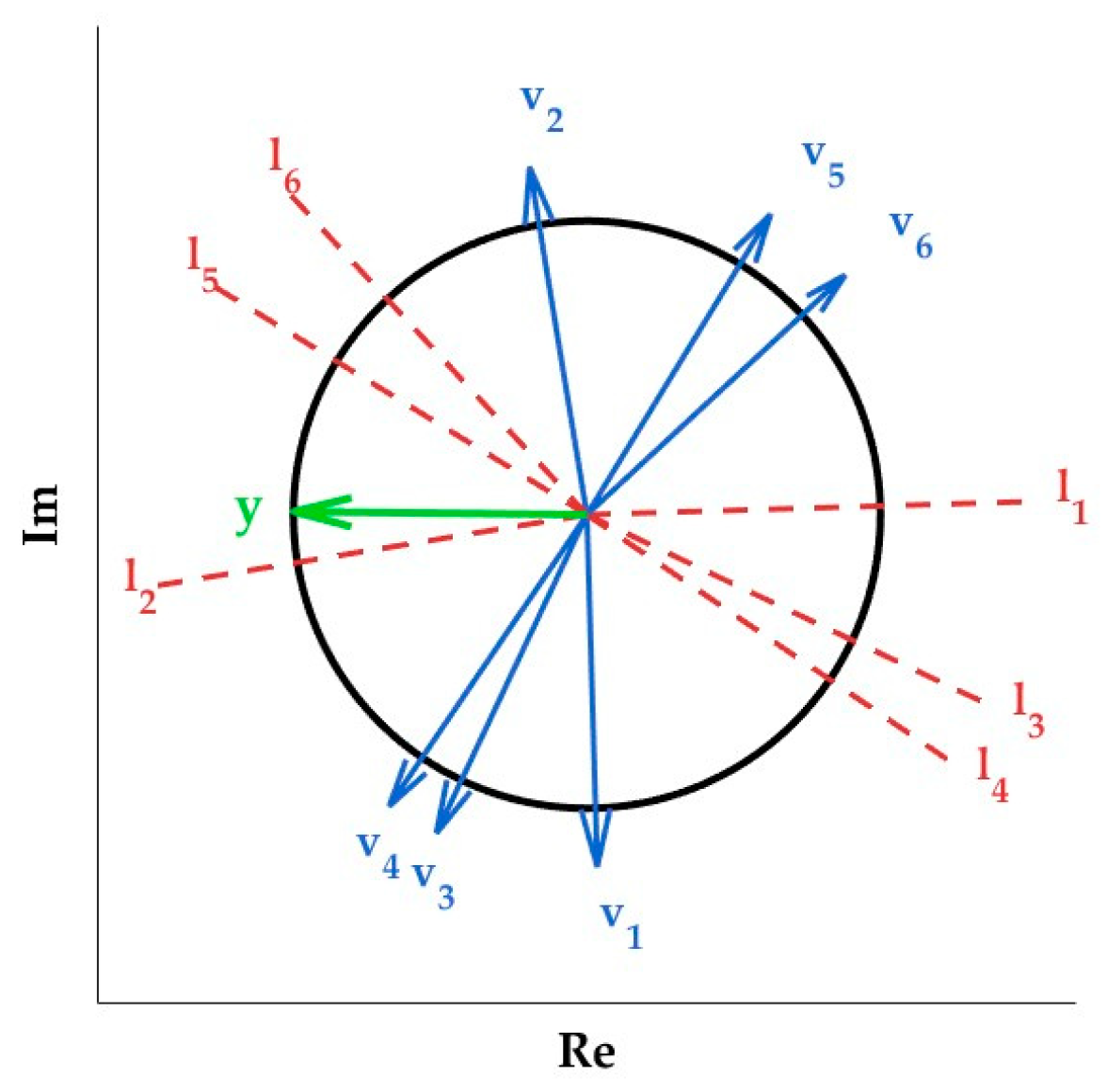
3.2.1. Phase Optimization for Binary
- Case 1: When lies on the boundary of the unit circle and aligns (or opposes) with the direction of , the objective function is maximized as , which satisfies . In this case, the optimal solution is as follows:
- Case 2: When the solution does not lie on the boundary of the unit circle, the optimization still occurs on the unit circle. However, the optimal direction deviates from and is the closest unit vector to , given by the following:
3.2.2. Amplitude Coefficient Optimization for
| Algorithm 2: Proposed Binary Phase Passive Beamforming Optimization Algorithm |
| Input: Channel vectors: ; power allocation vectors: ; precoding vectors: ; noise variance: ; maximum iteration times: ; convergence threshold:. Output: Optimal phase vectors: ; optimal coefficient: .
|
| Algorithm 3: Joint Active and Passive Beamforming Optimization |
| Input: Channel vectors: ; power allocation vectors: ; precoding vectors: ; noise variance: ; maximum iteration times: ; convergence threshold: . Output: Optimal active beamforming matrix: ; .
|
4. Numerical Results
4.1. Simulation Setting
4.2. Simulation Results
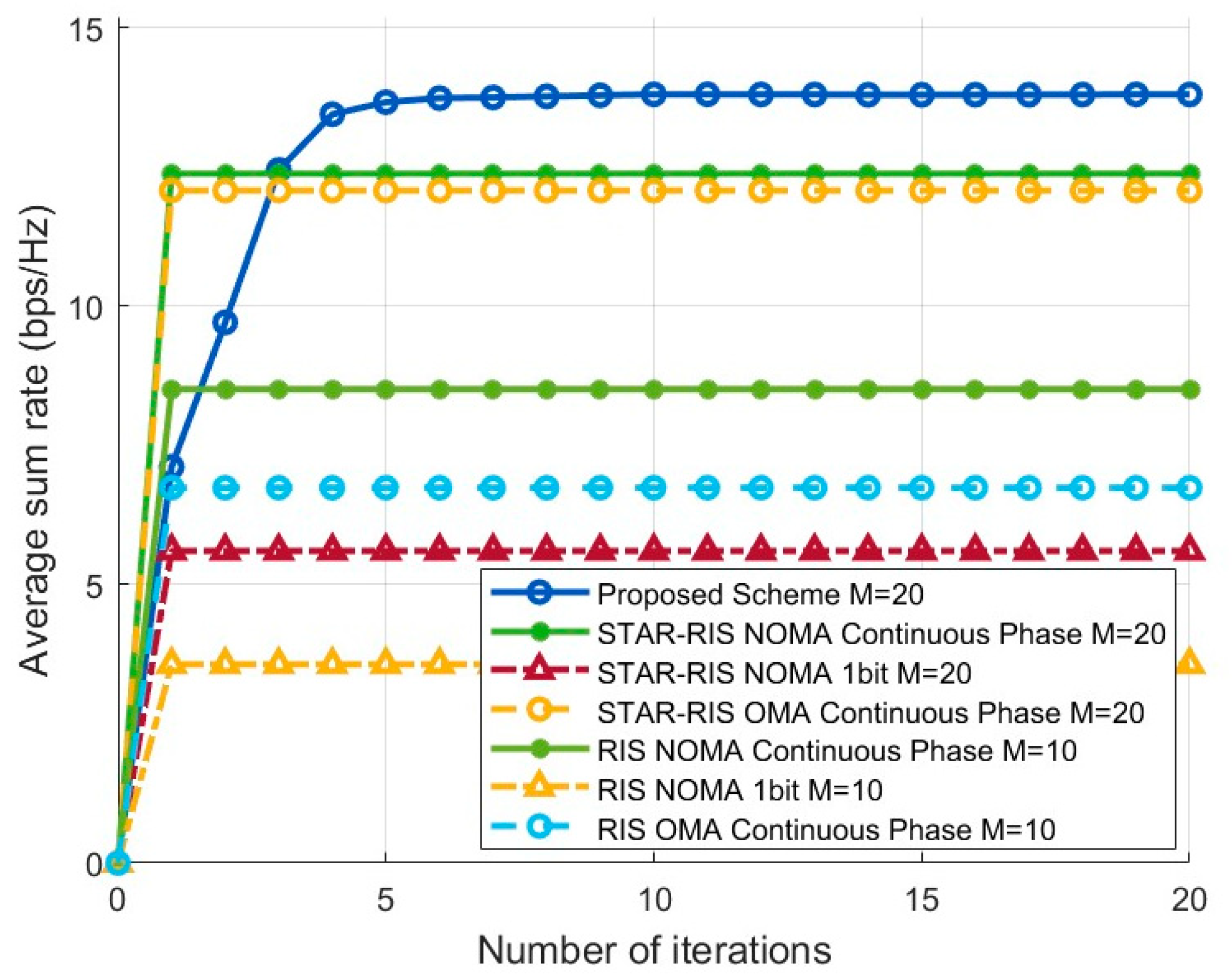
4.2.1. Comparison of System Sum Rate at Different Iteration Numbers
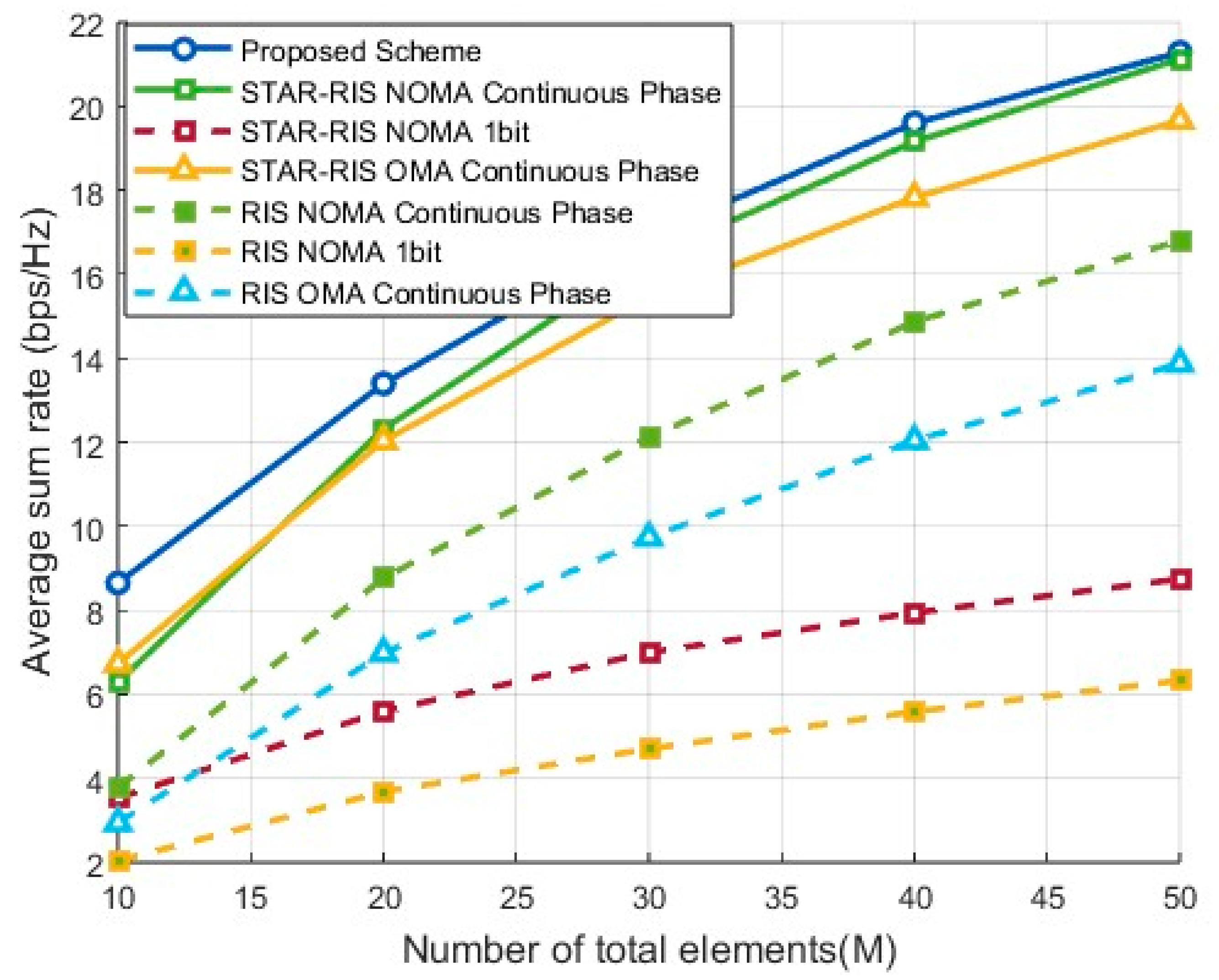
4.2.2. Comparison of System Sum Rate at Different Element Numbers
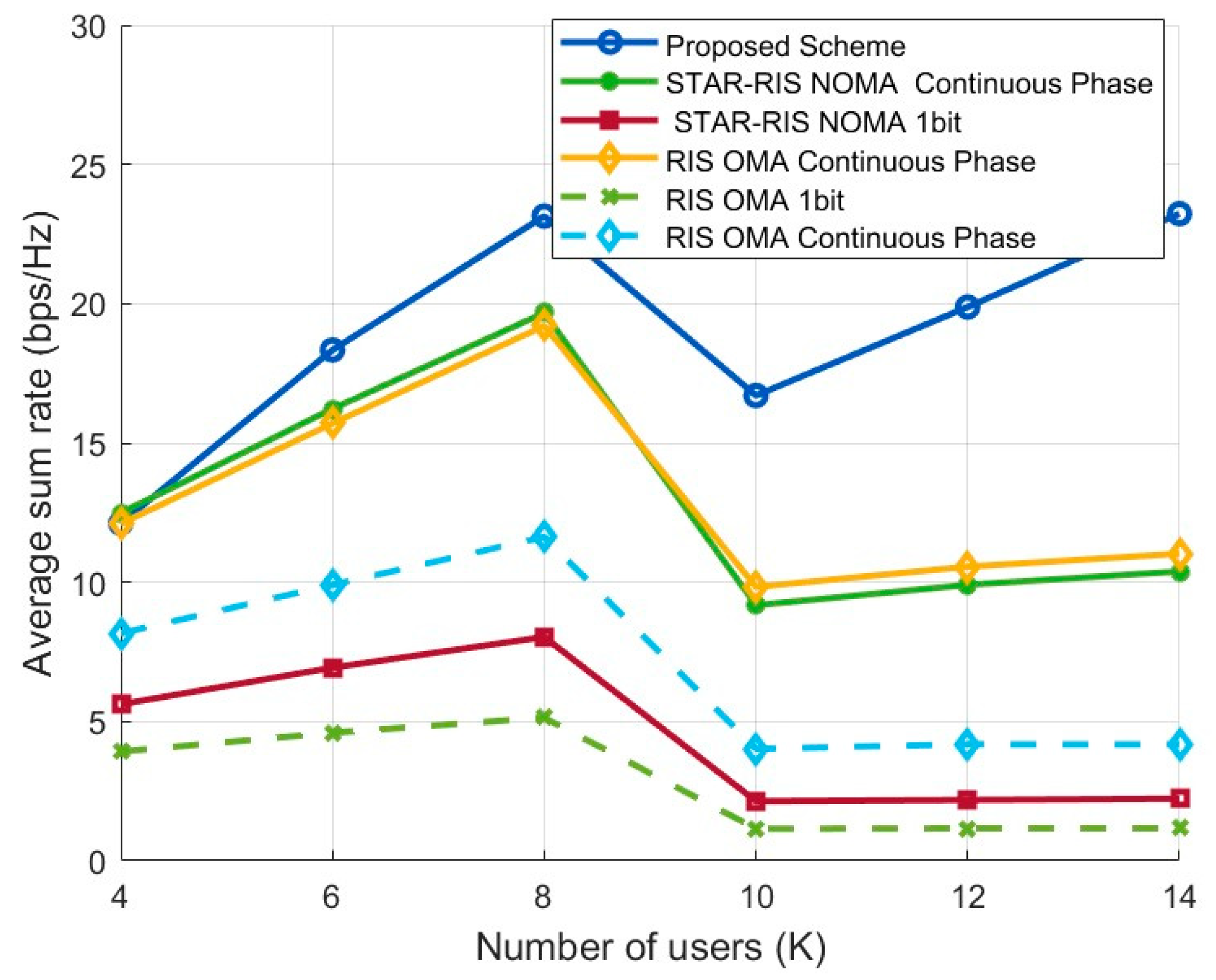
4.2.3. Comparison of System Sum Rate at Different User Numbers
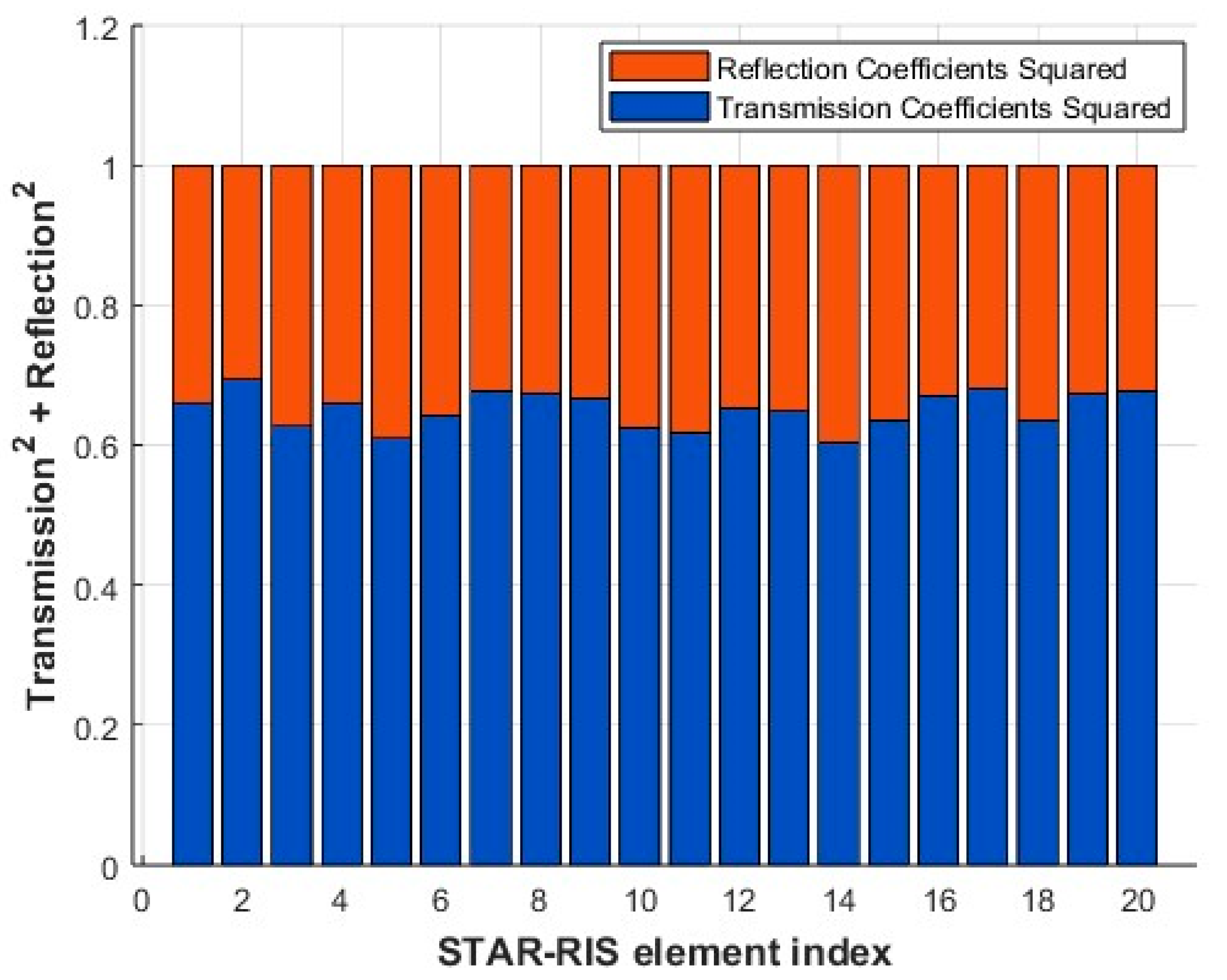
4.2.4. Comparison of Transmission and Reflection Coefficients at Different Element Indices
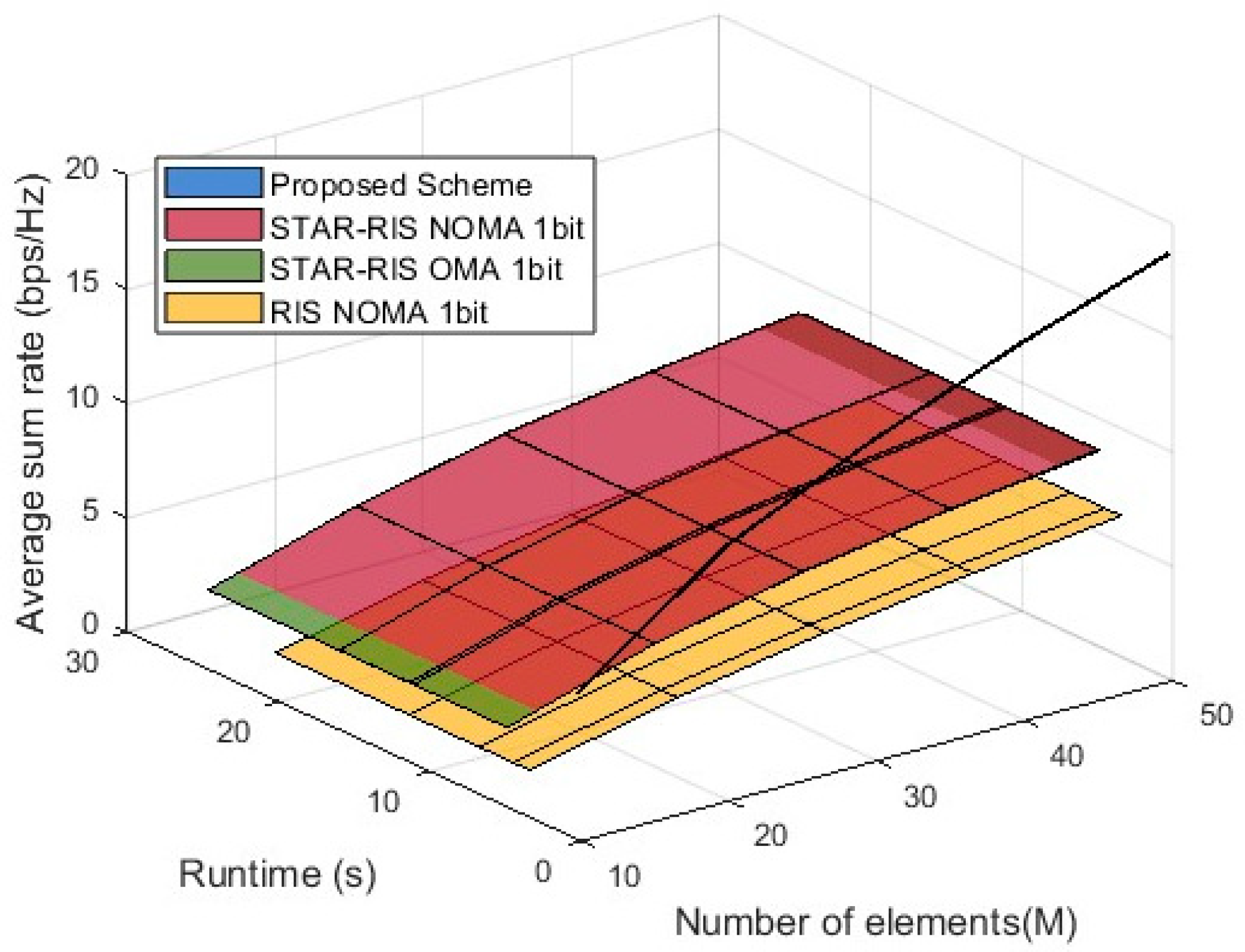
4.2.5. Performance Comparison of STAR-RIS NOMA Schemes in Terms of Average Sum Rate, Element Count, and Runtime
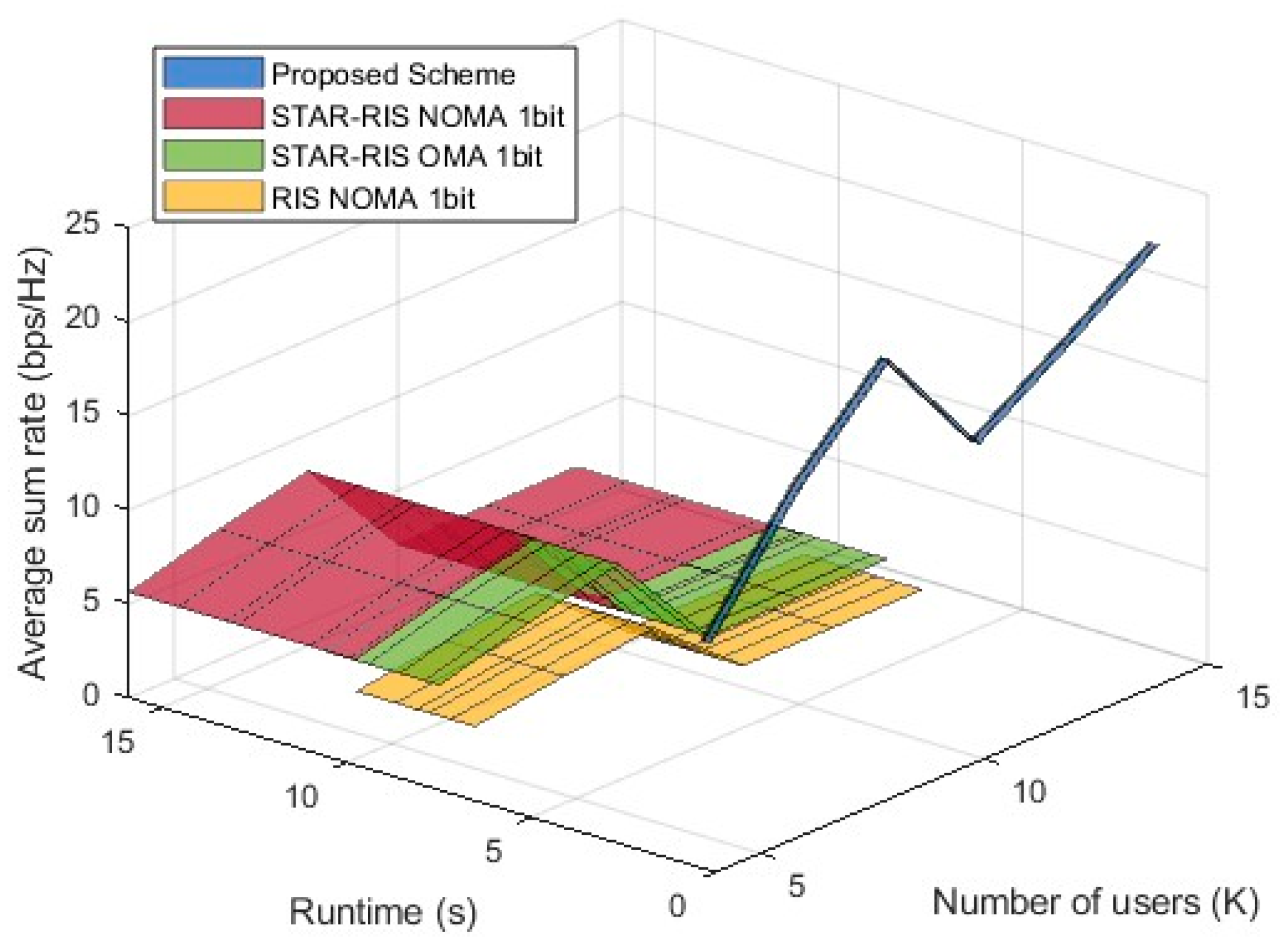
4.2.6. Performance Comparison of STAR-RIS NOMA Schemes in Terms of Average Sum Rate, Number of Users, and Runtime
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflecting Surface Aided Wireless Network. IEEE Commun. Mag. 2019, 58, 106–112. [Google Scholar] [CrossRef]
- Basar, E.; Di Renzo, M.; De Rosny, J.; Debbah, M.; Alouini, M.-S.; Zhang, R. Wireless Communications Through Reconfigurable Intelligent Surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Liu, Y.; Mu, X.; Xu, J.; Schober, R.; Hao, Y.; Poor, H.V.; Hanzo, L. STAR: Simultaneous Transmission and Reflection for 360° Coverage by Intelligent Surfaces. IEEE Wirel. Commun. 2021, 28, 102–109. [Google Scholar] [CrossRef]
- Zeng, M.; Li, X.; Li, G.; Hao, W.; Dobre, O.A. Sum Rate Maximization for IRS-Assisted Uplink NOMA. IEEE Commun. Lett. 2021, 25, 234–238. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Al-Dhahir, N. Exploiting Intelligent Reflecting Surfaces in NOMA Networks: Joint Beamforming Optimization. IEEE Trans. Wirel. Commun. 2020, 19, 6884–6898. [Google Scholar] [CrossRef]
- Wu, C.; Mu, X.; Liu, Y.; Gu, X.; Wang, X. Resource Allocation in STAR-RIS-Aided Networks: OMA and NOMA. IEEE Trans. Wirel. Commun. 2022, 21, 7653–7667. [Google Scholar] [CrossRef]
- Wen, H.; Tota Khel, A.M.; Hamdi, K.A. Phase Shift Configuration Strategies for Unbalanced T&R Users in STAR-RIS-Aided NOMA. IEEE Commun. Lett. 2023, 27, 3404–3408. [Google Scholar]
- Zhong, R.; Liu, Y.; Mu, X.; Chen, Y.; Wang, X.; Hanzo, L. Hybrid Reinforcement Learning for STAR-RISs: A Coupled Phase-Shift Model Based Beamformer. IEEE J. Sel. Areas Commun. 2022, 40, 2556–2569. [Google Scholar] [CrossRef]
- Tian, X.; Meng, H.; Li, X.; Zhang, H. A Method for Maximizing Sum Rate in Downlink NOMA Systems Assisted by Dual STAR-RISs. J. Electron. Inf. Technol. 2024, 46, 3537–3543. [Google Scholar]
- Wang, T.; Fang, F.; Ding, Z. Joint Phase Shift and Beamforming Design in a Multi-User MISO STAR-RIS Assisted Downlink NOMA Network. IEEE Trans. Veh. Technol. 2023, 72, 9031–9043. [Google Scholar] [CrossRef]
- Wang, P.; Wang, H.; Fu, Y. Average Rate Maximization for Mobile STAR-RIS-Aided NOMA System. IEEE Commun. Lett. 2023, 27, 1362–1366. [Google Scholar] [CrossRef]
- Su, Y.; Pang, X.; Lu, W.; Zhao, N.; Wang, X.; Nallanathan, A. Joint Location and Beamforming Optimization for STAR-RIS Aided NOMA-UAV Networks. IEEE Trans. Veh. Technol. 2023, 72, 11023–11028. [Google Scholar] [CrossRef]
- Xu, J.; Liu, Y.; Mu, X.; Schober, R.; Poor, H.V. STAR-RISs: A Correlated T&R Phase-Shift Model and Practical Phase-Shift Configuration Strategies. IEEE J. Sel. Top. Signal Process. 2022, 16, 1097–1111. [Google Scholar]
- Shen, K.; Yu, W. Fractional Programming for Communication Systems—Part I: Power Control and Beamforming. IEEE Trans. Signal Process. 2018, 66, 2616–2630. [Google Scholar] [CrossRef]
- Liu, Y.; Si, L.; Wang, Y.; Zhang, B.; Xu, W. Efficient Precoding and Power Allocation Techniques for Maximizing Spectral Efficiency in Beamspace MIMO-NOMA Systems. Sensors 2023, 23, 7996. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Zhao, Z.; Shen, K. Enhancing the Efficiency of WMMSE and FP for Beamforming by Minorization-Maximization. In Proceedings of the ICASSP 2023–2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–5. [Google Scholar]
- Zhang, Y.; Shen, K.; Ren, S.; Li, X.; Chen, X.; Luo, Z.-Q. Configuring Intelligent Reflecting Surface With Performance Guarantees: Optimal Beamforming. IEEE J. Sel. Top. Signal Process. 2022, 16, 967–979. [Google Scholar] [CrossRef]
- Shi, Q.; Hong, M. Penalty Dual Decomposition Method for Nonsmooth Nonconvex Optimization—Part I: Algorithms and Convergence Analysis. IEEE Trans. Signal Process. 2020, 68, 4108–4122. [Google Scholar] [CrossRef]
- Wang, Z.; Mu, X.; Liu, Y.; Schober, R. Coupled Phase-Shift STAR-RISs: A General Optimization Framework. IEEE Wirel. Commun. Lett. 2023, 12, 207–211. [Google Scholar] [CrossRef]
- Guo, H.; Liang, Y.-C.; Chen, J.; Larsson, E.G. Weighted Sum-Rate Optimization for Intelligent Reflecting Surface Enhanced Wireless Networks. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; IEEE: Piscataway, NJ, USA, 2020; pp. 106–112. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Wang, Y.; Xu, W. Beamforming Design for STAR-RIS-Assisted NOMA with Binary and Coupled Phase-Shifts. Entropy 2025, 27, 210. https://doi.org/10.3390/e27020210
Liu Y, Wang Y, Xu W. Beamforming Design for STAR-RIS-Assisted NOMA with Binary and Coupled Phase-Shifts. Entropy. 2025; 27(2):210. https://doi.org/10.3390/e27020210
Chicago/Turabian StyleLiu, Yongfei, Yuhuan Wang, and Weizhang Xu. 2025. "Beamforming Design for STAR-RIS-Assisted NOMA with Binary and Coupled Phase-Shifts" Entropy 27, no. 2: 210. https://doi.org/10.3390/e27020210
APA StyleLiu, Y., Wang, Y., & Xu, W. (2025). Beamforming Design for STAR-RIS-Assisted NOMA with Binary and Coupled Phase-Shifts. Entropy, 27(2), 210. https://doi.org/10.3390/e27020210