1. Introduction
Observing the outcomes of a sequence of measurements usually increases our knowledge about the state of a particular system we might be interested in. An informative measurement is the most efficient way of gaining this information, having the largest possible statistical dependence between the state being measured and the possible measurement outcomes. Lindley first introduced the notion of the amount of information in an experiment, and suggested the following greedy rule for experimentation: perform that experiment for which the expected gain in information is the greatest, and continue experimentation until a preassigned amount of information has been attained [
1].
Greedy methods are still the most common approaches for finding informative measurements, being both simple to implement and efficient to compute. Many of these approaches turn out to be Bayesian [
2,
3]. For example, during Bayesian Adaptive Exploration [
4,
5], measurement strategies are determined by maximizing the “expected information” for each “observation-inference-design” cycle. Alternatively, motivated by an inquiry-calculus still under development [
6], a closely related method whereby the entropy of possible measurements is maximized for each cycle of “inference” and “inquiry” has demonstrated success across a diverse array of measurement tasks [
7,
8,
9,
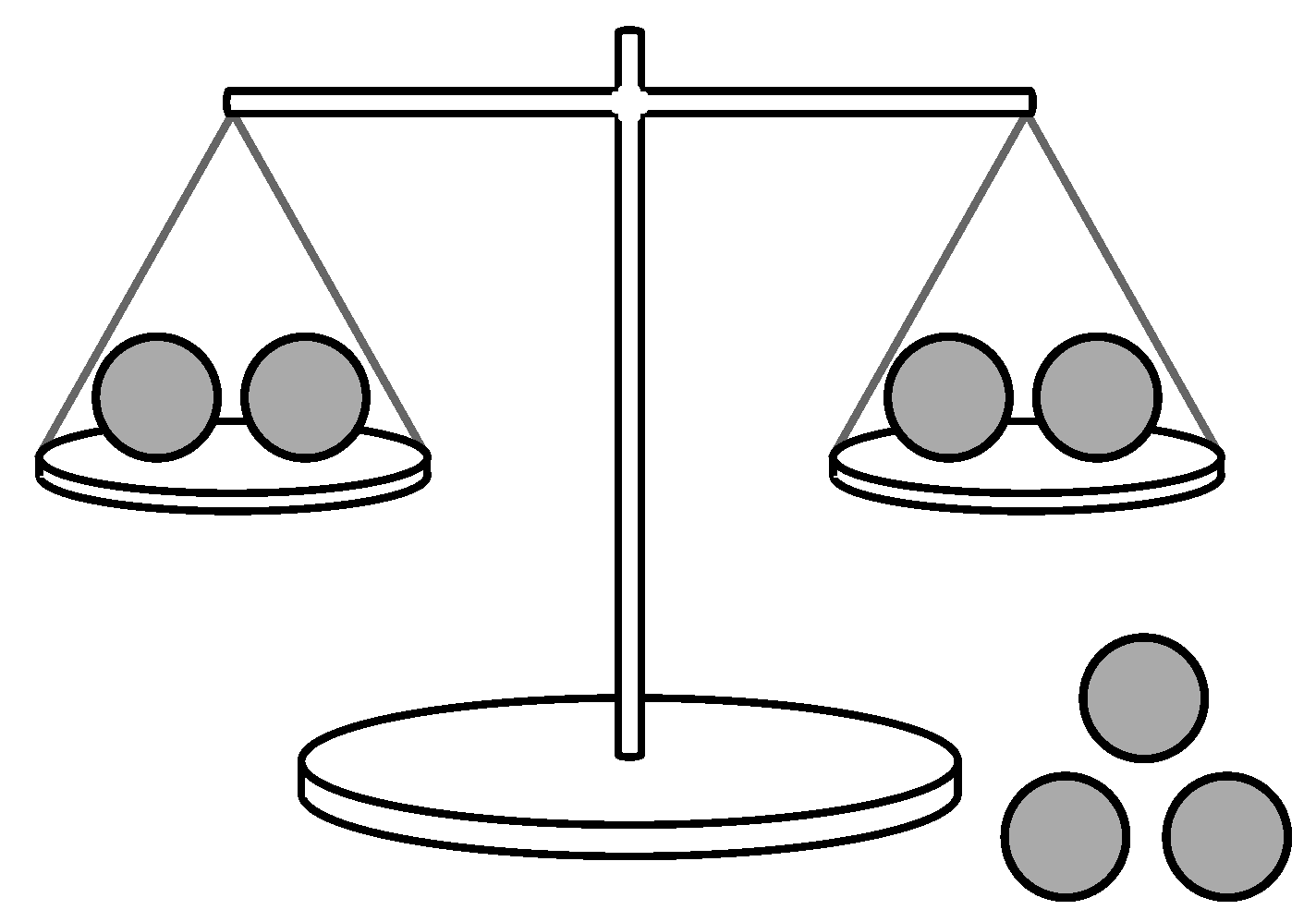
10]. As a concrete example of a greedy measurement task, consider a weighing problem where an experimenter has a two-pan balance and is given a set of balls of equal weight except for a single odd ball that is either heavier or lighter than the others (see
Figure 1). The experimenter would like to find the odd ball in the fewest weighings. MacKay suggested that for useful information to be gained as quickly as possible, each stage of an optimal measurement sequence should have measurement outcomes as close as possible to equiprobable [
2]. This is equivalent to choosing the measurement at each stage (i.e., the distribution of balls on pans) corresponding to the measurement outcome with largest entropy.
Less well-recognized is the fact that greedy approaches can sometimes lead to suboptimal measurement sequences. This is not usually the case for simple systems such as the weighing problem described above. However, in other cases, an optimal sequence of measurements may involve trade-offs where earlier measurements in the sequence lead to modest information gains, rather than the maximum gains attainable at those stages, so that later measurements can access larger information gains than would otherwise be possible. A greedy approach never allows for such trade-offs. This is seen in the robotics literature, such as for path planning and trajectory optimization for robots building maps from sensor data [
11,
12], path planning for active sensing [
13,
14], and robots exploring unknown environments [
12,
15]. These approaches generally have in common the application of information theory objectives, and the use of sequential optimization methods such as dynamic programming or reinforcement learning [
16,
17,
18]. Such methods specifically allow for the possibility of delayed information gains and non-myopic paths, and attempt to deal with the combinatorial nature of the underlying optimization problem. Exact dynamic programming is often computationally prohibitive or too time-consuming due to the need to consider all states of the problem. However, introducing efficient parametric approximations [
16,
19,
20], on-line approximations [
16,
17,
21], or real-time heuristics [
22], allows very good suboptimal solutions to be found.
The aim of this work is to develop from first-principles a general-purpose dynamic programming algorithm for finding optimal sequences of informative measurements. We do not consider measurement problems with hidden states, such as hidden Markov models, that can only be observed indirectly through noisy measurements. This leads to a tractable algorithm that constructs an optimal sequence of informative measurements by sequentially maximizing the entropy of measurement outcomes. In addition to planning a sequence of measurements for a particular measurement problem, our algorithm can also be used by an autonomous agent or robot exploring a new environment to plan a path giving an optimal sequence of informative measurements. The framework we use for dynamic programming is very general, and includes Markov decision processes (MDPs) as a special case: allowing the agent dynamics to be either stochastic or deterministic, and the states and controls to be either continuous or discrete. Our general dynamic programming framework also allows suboptimal solution methods from approximate dynamic programming and reinforcement learning to be applied in a straightforward manner, avoiding the need to develop new approximation methods for each specific situation.
The closest related previous work is that of Low et al. [
13] and Cao et al. [
14] in the active-sensing domain. Active sensing is the task of deciding what data to gather next [
23], and is closely related to explorative behavior [
24,
25]: for example, should an animal or agent gather more data to reduce its ignorance about a new environment, or should it omit gathering some data that are expected to be least informative. The work of Low et al. [
13] and Cao et al. [
14] models spatially-varying environmental phenomena using Gaussian processes [
2,
26,
27]. Informative sampling paths are planned using various forms of dynamic programming. Gaussian processes are also described within our general dynamic programming framework. However, in the work of Low et al. [
13] and Cao et al. [
14], it is not clear that dynamic programming is necessary for finding informative paths, as greedy algorithms are shown to achieve comparable results for the examples shown [
13,
14]. Krause et al. [
28] showed that finding optimal static sensor placements for a Gaussian process requires solving a combinatorial optimization problem that is NP-complete [
28]. Nevertheless, a greedy algorithm can achieve near-optimal performance when the information objective has the property of being submodular and monotonic [
28,
29,
30]. Further, for a particular path planning problem involving a Gaussian process, Singh et al. [
31] presented an efficient recursive-greedy algorithm that attains near-optimal performance. In this work, we demonstrate a simple path planning problem that cannot be solved efficiently using a greedy algorithm. We also demonstrate the existence of delayed information gains in this example, indicating that solution methods must take into account trade-offs in information gains to find optimally informative paths.
The structure of the paper is as follows. In
Section 2, the general dynamic programming algorithm is developed from first-principles. The algorithm is then applied to two well-known examples (with slight modifications) in
Section 3 in order to illustrate the approach and present some exact solutions given by our algorithm. In
Section 4, the algorithm is approximated by making use of approximate dynamic programming methodology to allow for real-time behavior of an autonomous agent or robot, and it is applied to a scaled-up on-line example where a greedy approach is shown to fail. In
Section 5, a slight modification to the algorithm is given to describe Gaussian processes for active sensing and robot path planning. A conclusion is presented in
Section 6.
2. Sequential Maximization of Entropy
To determine the kinds of measurements that are most informative, we introduce two random variables
X and
M, where
X describes the state of the system of interest and is defined over some suitable state-space, and
M describes the outcome of a measurement made on that system and is defined over the space of possible measurement outcomes. These random variables are dependent, because we hope a measurement outcome
M provides us with some information about the state
X. This dependence can be described using the mutual information [
32], given by
where the entropy
is the average uncertainty in the random variable
X describing the state, and the conditional entropy
is the average uncertainty in
X that remains after observing the outcome
M of a measurement performed on
X. This means
is the average reduction in uncertainty about
X that results from knowledge of
M [
2]. Its minimum value,
, is obtained when
X and
M are independent random variables, while its maximum value,
, is obtained when
; so that if you know
M then you know everything there is to know about
X. Given definitions for
X and
M corresponding to a particular system of interest, we would like to choose the measurement that maximizes
in order to reduce our uncertainty about
X and obtain the maximum amount of information available.
Assumption 1. We now focus exclusively on measurement outcomes satisfyingThis means the measurement outcome M of a state is fully determined (i.e., the uncertainty over M is zero) given complete knowledge of the state X. For example, in the weighing problem shown in Figure 1, if the state of the odd ball is known with complete certainty to be “heavy ball on left pan”, then it is also known that the measurement outcome will be “left-pan heavier”. Therefore, the only source of uncertainty in a measurement outcome is due to uncertainty in our knowledge of the state we are attempting to measure, rather than any measurement error. This is unlike the case of a hidden Markov model, or state-space model, where measurements (observations) of a state are noisy, and yield only partial state information. Here, we are modelling the case of complete state information rather than partial state information. The mutual information
can be written equivalently as
, so that Assumption 1 means
can be maximized over the probability distribution of measurement outcomes,
,
Another way of stating this is that
is a
maximum entropy distribution [
33].
The entropy maximization will usually need to be done over a sequence of measurements, as it is unlikely that a single measurement will be sufficient to determine
X precisely when either a large number of states are present, or when measurement resolution is limited. For example, using a two-pan balance to find the odd ball in the weighing problem usually requires a sequence of weighings. Extending our approach from a single measurement with outcome
M, to a sequence of measurements with outcomes
, we look for a sequence of probability distributions
that maximize the joint entropy
. The key observation is that in many cases of interest this maximization can be carried out sequentially. Applying the chain rule for entropy [
34], leads to
where
becomes
when
. It is now straightforward to see that if each
can be modelled as an independent random variable, then we only need to find a sequence of probability distributions that maximize a sum of independent entropies:
which is a much simpler task and can be done sequentially. The maximization in (
5) will be written as a dynamic program in the next section. Alternatively, if the
are dependent random variables, sequential maximization of Equation (
4) can be done using the method of state augmentation, but comes with the cost of an enlarged state-space. This is demonstrated in
Section 5 for the case of a Gaussian process.
2.1. Dynamic Programming Algorithm
Dynamic programming [
16] is a general technique for carrying out sequential optimization. Provided the objective function can be decomposed as a sum over independent stages as in (
5), the principle of optimality guarantees that optimal solutions can be found using the technique of backward induction: that is, starting at the final stage of the problem (the tail subproblem) and sequentially working backwards towards the initial stage; at each stage using the solution of the previous subproblem to help find the solution to the current subproblem (for this reason, they are often called overlapping subproblems). The Equation (
5) is close to “the basic problem” of dynamic programming (DP), and we will adopt the notation commonly used in DP.
In order to maximize the sum of entropies in Equation (
5), we will need to introduce a set of parameters to maximize over. For this purpose, it turns out that two parameters for each measurement are sufficient (see the discussion below). Therefore, the probability distribution
is now assumed to depend on the two parameters
x and
u (note that
x is not related to the random variable
X, but is standard notation in DP), giving
. For a sequence of
N independent measurements, the
kth probability distribution then becomes,
where
and
are sets of parameters allowing the sequence of probability distributions
to vary according to the measurement chosen at each stage of the sequence. Each parameter
is chosen from the set of measurements
possible at stage
k and
, while each parameter
is then updated according to the discrete dynamical system:
In other words, the “measurement state”
determines how the set of possible measurements changes from
to
as a result of the measurement
chosen, and the corresponding measurement outcome
that is realized. Allowing the set of possible measurements to change at each stage of a measurement process in this way is a unique and defining feature of our model. To allow for
closed-loop maximization where this extra information can be used at each stage, we define a sequence of functions
that map
into
. A
policy or a
design is then given by a sequence of these functions, one for each measurement:
Maximizing over policies, and adding a terminal entropy
for stage
N, allows Equation (
5) to be written as
The final step is to write the objective in (
8) as an expectation. This can be done using the fact that entropy is the expected value of the Shannon information content:
where the expectation is taken over all measurement outcomes
, and where
is the Shannon information content of measurement outcome
. Expressing the entropies in (
8) in terms of expectations, then using the linearity of expectation and the fact that
N is finite to interchange the summation and the expectation, now leads to an expression for the maximum expected value of
N information contents:
where the expectation is over
, and the information content of the
kth measurement is given by
Proposition 1. (Dynamic programming algorithm): The maximum entropy of N measurements, as expressed by Equation (10), is equal to given by the last step of the following algorithm that starts with the terminal condition , and proceeds backwards in time by evaluating the recurrence relation:from the final stage to the initial stage . The maximization in Equation (12) is over all measurements possible at and stage k, while the expectation is over all measurement outcomes , and the function is the information content of measurement outcome :The optimal measurement sequence is given by the sequence that maximizes the right hand side of Equation (12) for each and k. The proof of this proposition is similar to that given in Bertsekas [
16]. The procedure for the dynamic programming algorithm is outlined in Algorithm 1.
| Algorithm 1 Dynamic Programming Algorithm |
forto 0 do for all do end for end for
|
There are two alternative ways to apply the DP algorithm that are both consistent with optimizing the objective in Equation (
10). For a fixed number of measurements
N, the DP recurrence relation can be iterated over
N stages to determine the maximum information gained from
N measurements as given by
. Alternatively, a fixed amount of information can be gained over a minimum number of measurements by iterating the DP recurrence relation over a number of stages until we first reach this pre-assigned amount of information; whereupon we terminate the algorithm and read off the corresponding value of
N. Are there smaller values of
N that would lead to this information gain? By construction we stopped the algorithm at the first stage we gained the required amount of information, so stopping any earlier would lead to a smaller information gain. We use both of these alternatives in
Section 3 and
Section 4.
2.2. Extended Dynamic Programming Algorithm for an Autonomous Agent
The previous DP algorithm allows us to find an optimal sequence of independent measurements by maximizing the entropy of N independent measurement outcomes. We now include a simple extension to describe an autonomous agent seeking an optimal sequence of independent measurements as it explores a new environment. This opens up additional possibilities where dynamic programming can play a more substantial role.
An agent moving through an environment is described by its position
at time
k. The agent then decides to take control
, moving it to a new position
at time
according to the following dynamical system:
where
describes a random “disturbance” to the agent dynamics if the dynamics is stochastic. Coupling the agent dynamics to a sequence of measurements is achieved by augmenting the measurement state with the agent position, to give:
so the set of all measurements possible at stage
k now depends on the position of the agent in the environment at time
k, as well as the measurement state during the
kth measurement. The agent is assumed to take one measurement at each time step so the horizon of the agent dynamics is determined by the number of measurements in a sequence. It is possible to relax this assumption by introducing an extra index
that distinguishes the horizon of the agent dynamics from the number of measurements in a sequence, but we choose not to do this here. The DP recurrence relation given by (
12) now becomes,
where
now depends on both
and
(due to state augmentation); and there is an additional expectation over
, and maximization over
, in order to allow the agent to move from
to
. The corresponding DP algorithm starts with
, and proceeds backwards in time by evaluating the recurrence relation (
16) from stage
to stage
. This procedure is outlined in Algorithm 2. The last step of the algorithm returns
, the maximum entropy of
N measurements made by an autonomous agent. Given a choice of values for
, then
should also be maximized over
to give:
. The optimal measurement sequence is given by the sequence
that jointly maximizes the right hand side of Equation (
16) for each
and
at each
k, and the autonomous agent dynamics is determined by the sequence
that maximizes the right hand side of Equation (
16) for each
at each
k.
| Algorithm 2 Extended Dynamic Programming Algorithm |
forto 0 do for all do end for end for
|
Proposition 2. (Extended dynamic programming algorithm): The objective maximized by Algorithm 2 is given bywhere the policies and are sequences of functions given byand where is an expectation over , and is an expectation over . The proof of Proposition 2 is given in
Appendix A. The extended DP algorithm in Algorithm 2 looks computationally formidable due to the potentially large number of evaluations of (
16) required. Fortunately, the constraint given by
will often limit the number of feasible measurement states
for a given agent position
, so that instead of
potential evaluations of (
16), there will be some smaller multiple of
evaluations required.
4. Real-Time Approximate Dynamic Programming
The exact DP approach given in Algorithms 1 and 2 requires all states of the problem to be taken into account. For many problems, the number of states can be very large, and fast computation of an exact solution in real time is therefore not possible. A useful approximation that allows for real-time solutions is to look ahead one or more stages, simulate some possible paths going forwards in time all the way out to the horizon, then choose the next state from the simulated path with largest entropy. This is repeated at each stage. We do not need to consider more states than those actually visited during the simulation—a considerable saving when the number of states in the problem is large. This “on-line” approach leads to an efficient algorithm that approximates the problem, while hopefully also leading to good suboptimal solutions. For the special case of problems with deterministic dynamics, efficient algorithms already exist; including Dijkstra’s shortest-path algorithm for discrete states [
16] and an extension for continuous states [
36], and the
algorithm for discrete states [
37,
38]. In the more general case of stochastic dynamics, the rollout algorithm [
16,
17,
21], combined with adaptive Monte Carlo sampling techniques such as Monte Carlo Tree Search [
39,
40], leads to efficient algorithms. Other possibilities also include sequential Monte Carlo approaches [
41]. In this section, we develop an on-line algorithm for stochastic dynamics that allows for real-time behavior of an autonomous agent or path-planning robot seeking an optimal set of measurements as the measurement task is unfolding.
The first approximation is to restrict attention to limited lookahead. This can be done, for example, by introducing a one-step lookahead function
that approximates the true function
. Denoting
as the general one-step lookahead approximation of
, we write the one-step lookahead approximation of Equation (
16) as,
The one-step lookahead function
can be found using an on-line approximation, as we now describe. Given some
base policies (also called
base heuristics)
and
, it is possible to simulate the dynamics using Equations (
7) and (
14) from
all the way to the horizon at
. This idea is used in Algorithm 3 describing the stochastic rollout algorithm. During each stage of the rollout algorithm, simulation is used to find
for each control
, and each measurement
(lines 3–15). Following this, the values of
and
that maximize the right-hand-side of Equation (
26) are chosen, leading to the rollout policies
and
(lines 16 and 17). Rollout policies are guaranteed to be no worse in performance than the base policies they are constructed from, at least for base policies that are
sequentially improving [
16,
17]. In practice, rollout policies are often found to perform dramatically better than this [
16].
To find
for each pair
, we use simulation and Monte Carlo sampling in Algorithm 3. Firstly, the samples
and
are drawn from the probability distributions for
and
in line 5, and used to simulate the dynamics of
for the control pair
, to give
in line 6. The rollout phase then takes place in lines 7–11, where
is simulated by generating a pair of base policies, drawing samples for
and
, and then applying Equations (
7) and (
14), stage-by-stage until the horizon is reached. At each stage the information content
is collected, and added to the other stages to produce an estimate for
. These steps are repeated many times, and the estimates for
are then averaged to give
; where the expectations on Line 14 are approximated by their sample averages.
| Algorithm 3 Stochastic Rollout Algorithm |
- 1:
Input: - 2:
fortodo - 3:
for each do - 4:
repeat - 5:
, - 6:
- 7:
for to do - 8:
- 9:
, - 10:
- 11:
end for - 12:
Store: - 13:
until a selected criterion is met - 14:
- 15:
end for - 16:
- 17:
- 18:
, - 19:
- 20:
end for
|
There are several steps in Algorithm 3 that can be made more efficient by using adaptive sampling methods such as Monte Carlo Tree Search. In line 3, some less worthwhile controls can either be sampled less often in lines 4–13, the simulation of those controls in lines 7–11 can be terminated early before reaching the horizon, or those controls may be discarded entirely. This can be done adaptively by using, for example, statistical tests or heuristics. There are also other options available, such as rolling horizons and terminal cost approximations. See Bertsekas [
16] and references therein for a more complete discussion.
Algorithm 3 makes use of the subroutine
Generate_base_policies. For rollout to work, a base policy must be fast to evaluate. Here, we use the idea of multistep lookahead to generate base policies. Setting
to zero in Equation (
26), gives the zero-step lookahead solution:
which corresponds to maximizing the entropy of the current measurement only. The next simplest choice is to approximate
itself with a one-step lookahead:
where
is now an approximation of
. Setting
to zero, leads to the following closed-form expression for one-step lookahead:
This equation gives the first correction to the zero-step lookahead result (
27), so that
now depends on the information content at
k and
. We now have a closed-form expression that depends on both
and
(where
appears through
in the argument of
), so that Equation (
28) can be used to generate the base policies needed in Algorithm 3. The subroutine is given in Algorithm 4. Instead of approximating the expectations in Equation (
28) by their sample averages, we apply an “optimistic approach” and use the single-sample estimates
,
, and
. The expression on Line 3 is a closed-form expression, so the maximizations leading to the control
and the measurements
and
can be done very quickly. Now
is discarded (only the first stage is approximated for limited lookahead) to return a pair of base policies
and
.
| Algorithm 4 Generate base policies (one possibility based on an optimistic one-step lookahead) |
- 1:
Input: - 2:
- 3:
- 4:
|
The time efficiency of Algorithm 3 strongly depends on how Monte Carlo sampling is performed. If it cannot be carried out within the time constraints of the real-time problem, then adaptive sampling techniques such as Monte Carlo tree search must be used. This may lead to some degradation in the quality of solutions, but the aim of these techniques is to reduce the risk of degradation while gaining substantial computational efficiencies. In some cases, the principle of certainty equivalence may hold for the agent dynamics and single-sample estimates may be sufficient for approximating expectations. In other cases, such as for Gaussian processes discussed in
Section 5, a model for
allows closed-form expressions for expectations instead of requiring expensive sampling techniques. In the limit of pure rollout (i.e., with no Monte Carlo sampling), the time complexity of Algorithm 3 is
; where
N is the number of measurements (or number of stages to reach the horizon), and
is the maximum number of agent controls and measurement choices per stage. If
N is too large for real-time solutions, then further options are available from approximate dynamic programming and reinforcement learning, such as rolling horizons with terminal cost approximation, or various other forms of approximate policy iteration [
16]. Algorithms 3 and 4 are now demonstrated using an example with deterministic agent dynamics.
Find the Submarine On-Line
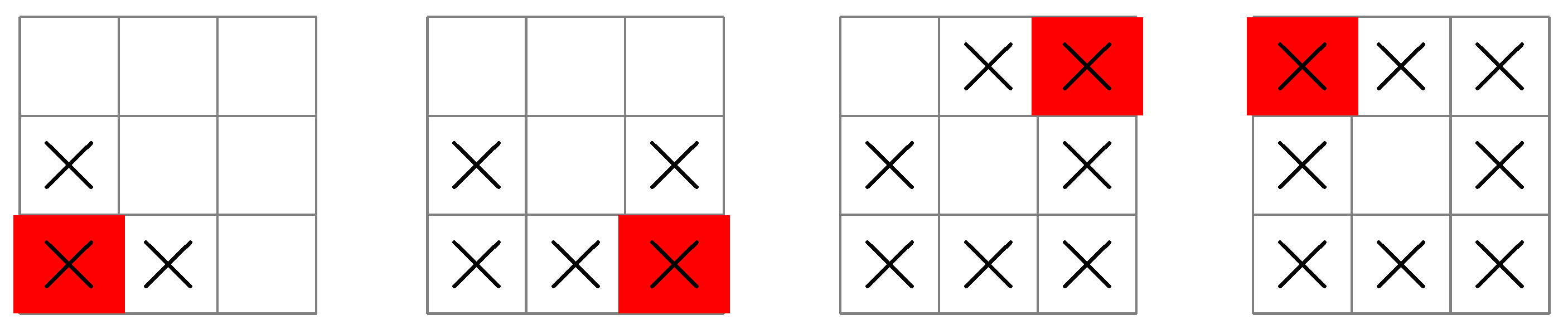
In this section, we compare a greedy policy to one given by real-time approximate dynamic programming (Algorithms 3 and 4) for the example “find the submarine” previously discussed. A greedy policy is the most appropriate comparison here, since any improvement in performance beyond a greedy policy will demonstrate planing in a real-time environment. The greedy policy is found to give optimal behavior up to a certain grid size, beyond which it completely fails. The approximate DP (rollout) policy continues to give (near) optimal performance for much larger grids, where planning is demonstrated to take place.
Algorithms 3 and 4 are appropriately modified to include a parametric model for
, deterministic agent dynamics, and only a single choice of measurement at each stage. In Algorithm 3, this means lines 4, 5, 9, 13, 18, and the expectation with respect to
on line 14 are no longer required. Following from Equation (
22) and (
26) now becomes
where
. To generate base policies for use in the rollout algorithm, we use the same approach that led to Equation (
28), yielding the closed-form expression:
where
, and
. The minimization over
in Equation (
30) is equivalent to maximizing the terms
. Therefore, instead of Equation (
30), we equivalently have,
The Equation (
31) can be derived from a DP algorithm with recurrence relation:
that maximizes the objective:
. A moment’s reflection should convince the reader that this DP algorithm also solves “find the submarine”. Therefore, instead of approximating Equation (
22) to get (
29), we now approximate Equation (
32) to get
where the base policy
can be generated using Equation (
31). Algorithms 3 and 4 can now be appropriately modified to suit Equations (
31) and (
33). During each stage of rollout, simulation is used to find
for each control
taken at state
, and the value of
that maximizes the right-hand-side of Equation (
33) is chosen. This leads to the rollout policy
, and describes the path followed by the ship as it plans an optimal sequence of sonar measurements.
The base policy generated using Algorithm 4 with Equation (
31) is shown in
Figure 6 for a
grid.
This policy is greedy after the first stage: after the initial condition has been chosen, the policy seeks the maximum value of
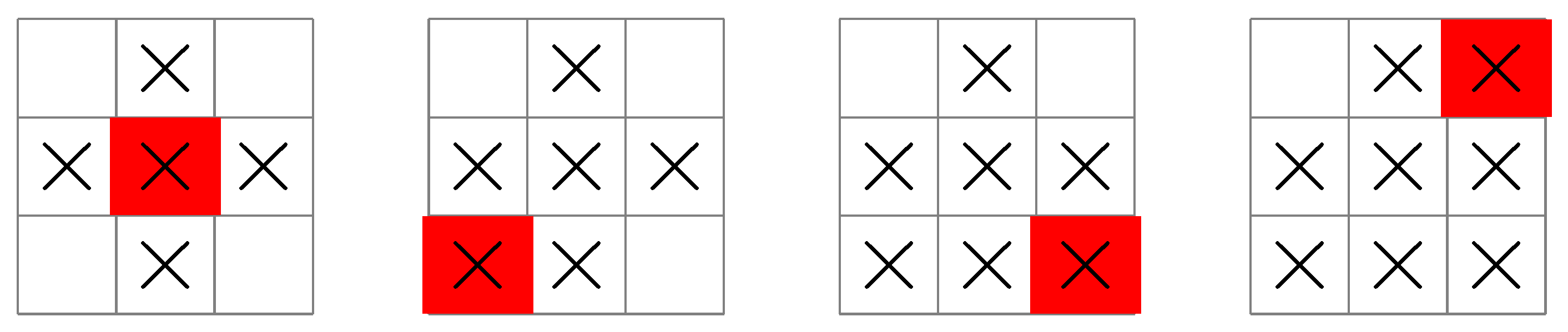
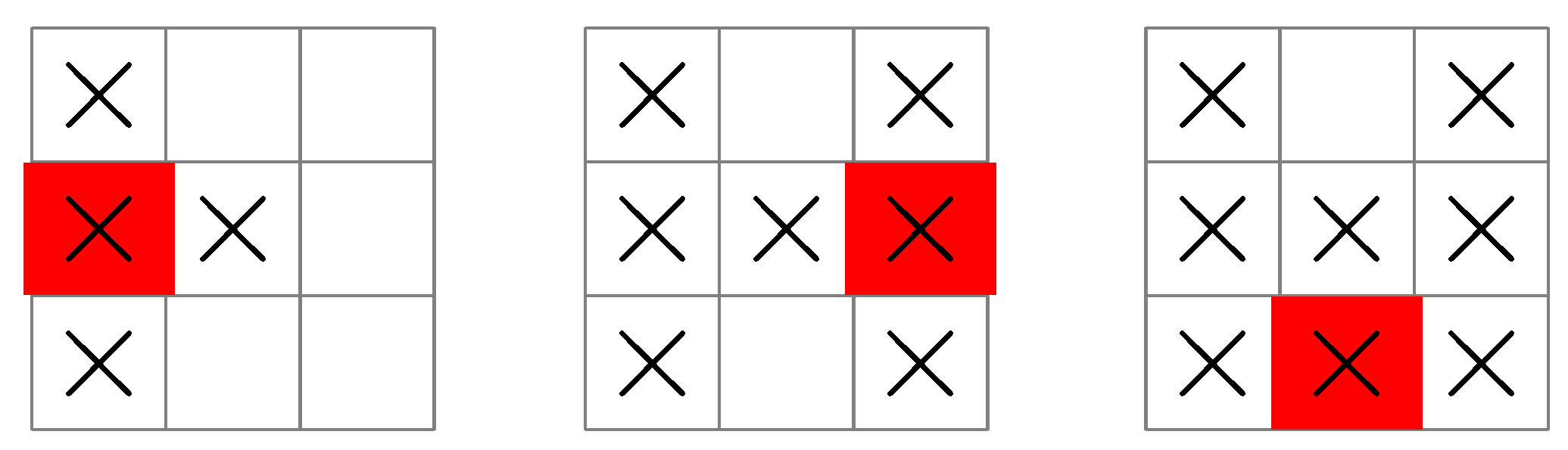
at each stage. Nevertheless, the greedy base policy turns out to be optimal for the
grid shown in
Figure 3,
Figure 4 and
Figure 5, as well as for all grids up to
.
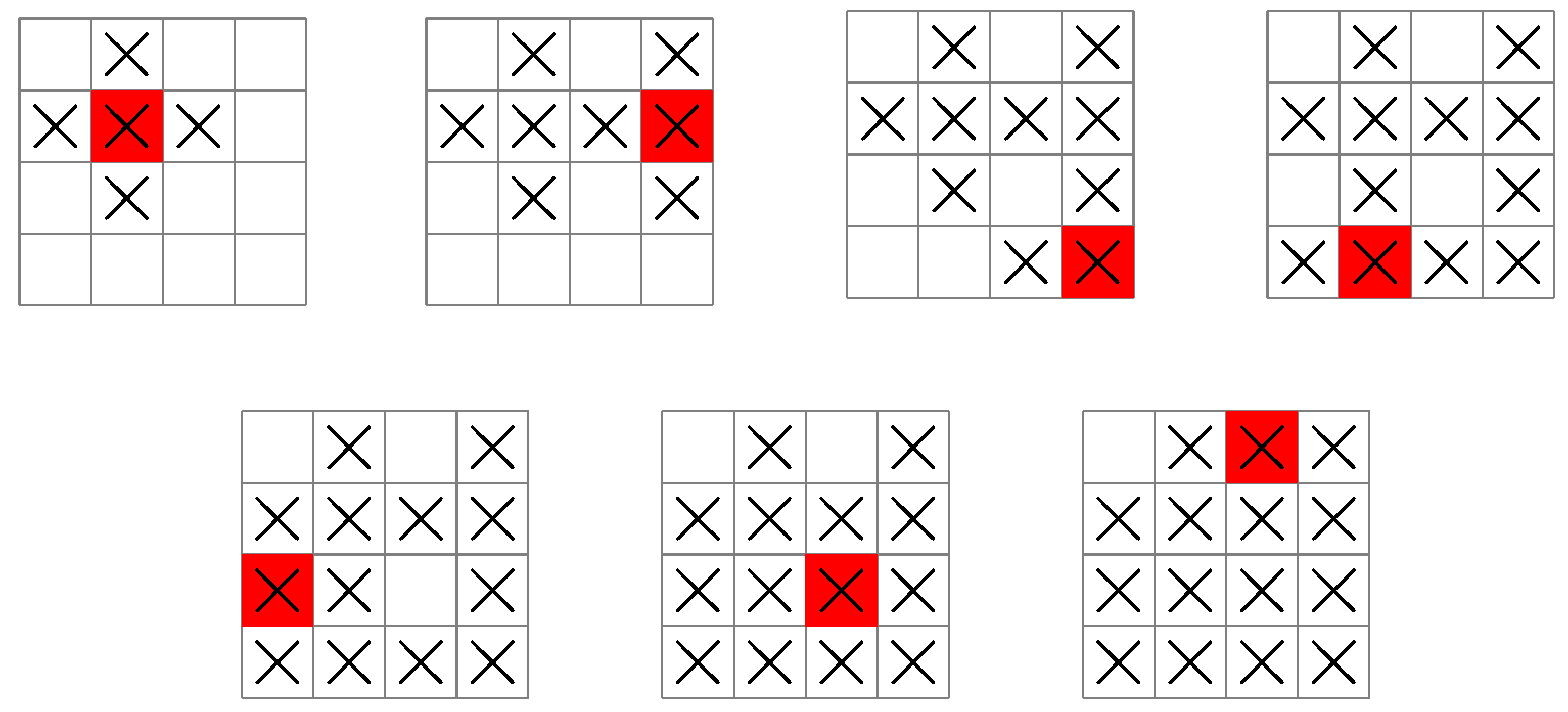
For grids larger than
, the greedy base policy no longer works, and it becomes necessary to plan each measurement to obtain an optimal search pattern. The reason can be seen in
Figure 7, which shows a ship following the greedy base policy on a
grid.
The grid is now large enough that a ship can move out of reach of a region of unsearched squares, as shown in
Figure 7. This is not possible for smaller grids such as those in
Figure 6, because any unsearched squares will always be within reach of an admissible control (i.e., a control satisfying
). As the grid gets larger, however, moving the ship back to a region of unsearched squares becomes more and more difficult under the greedy base policy, since it becomes possible for
all controls to maximize the entropy of the next stage (see
Figure 7). In this case, the control that is chosen no longer depends on the entropy of a measurement, but rather, on the order the admissible controls are processed in.
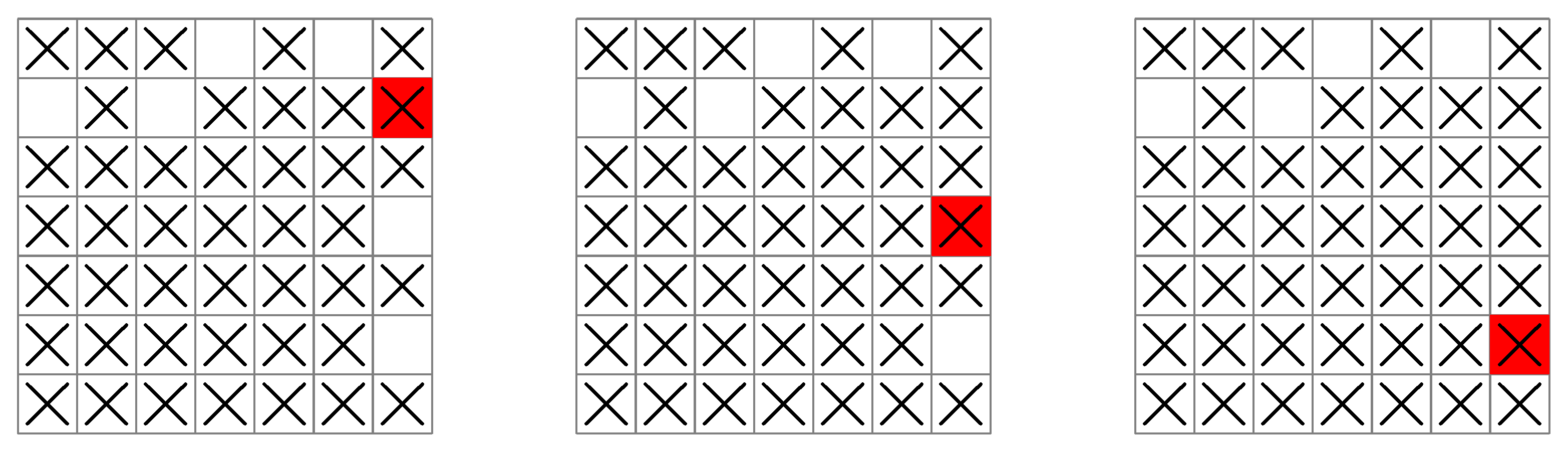
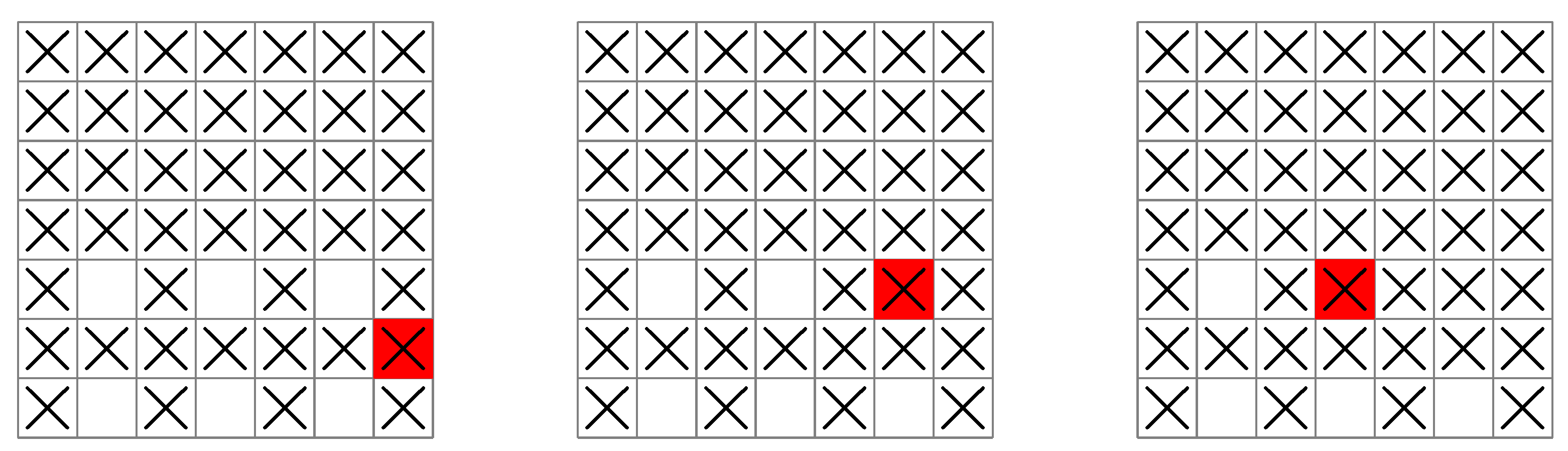
Surprisingly, although the greedy base policy does not exhibit optimal behavior for larger grids, it can be used to improve a policy that subsequently attains optimal behavior. This improved policy (the rollout policy) is used to plan an optimal search pattern. A ship following the rollout policy is shown in
Figure 8 for a
grid.
During the late stages of this policy, the ship searches the remaining squares systematically by following a planned sequence of moves. Regardless of the initial condition, the planning done by the rollout policy avoids the ship moving out of reach of a region of unsearched squares as it does in
Figure 7. As the grid increases in size, this behavior continues, and the minimum number of measurements guaranteed to find the submarine is shown in
Table 2.
In order to guarantee finding the submarine, it is necessary to search each square of the grid except for the last square (if we have not already found the submarine, it is guaranteed to be on the last square). However, according to the results in
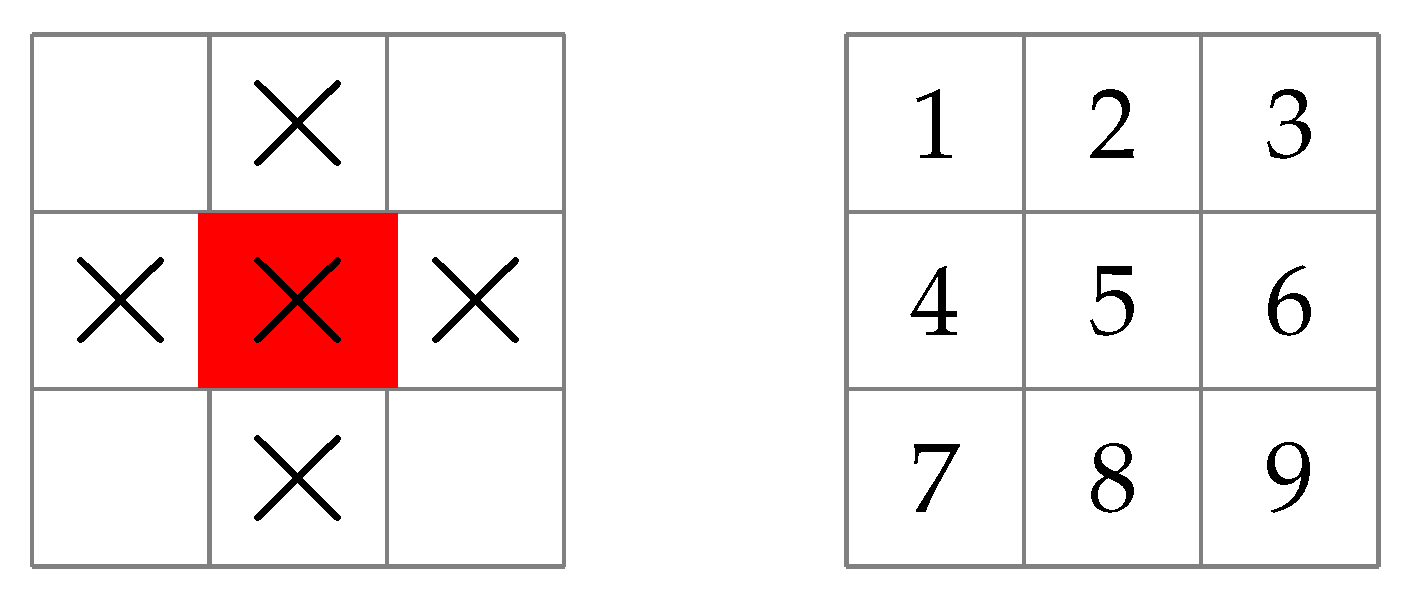
Table 2, the minimum number of measurements is approximately half the total number of squares that are searched. In other words, using a local search pattern such as the one shown in
Figure 2 can substantially reduce the number of measurements taken to find the submarine by using dynamic programming to plan a path that includes a (near) optimal measurement sequence.
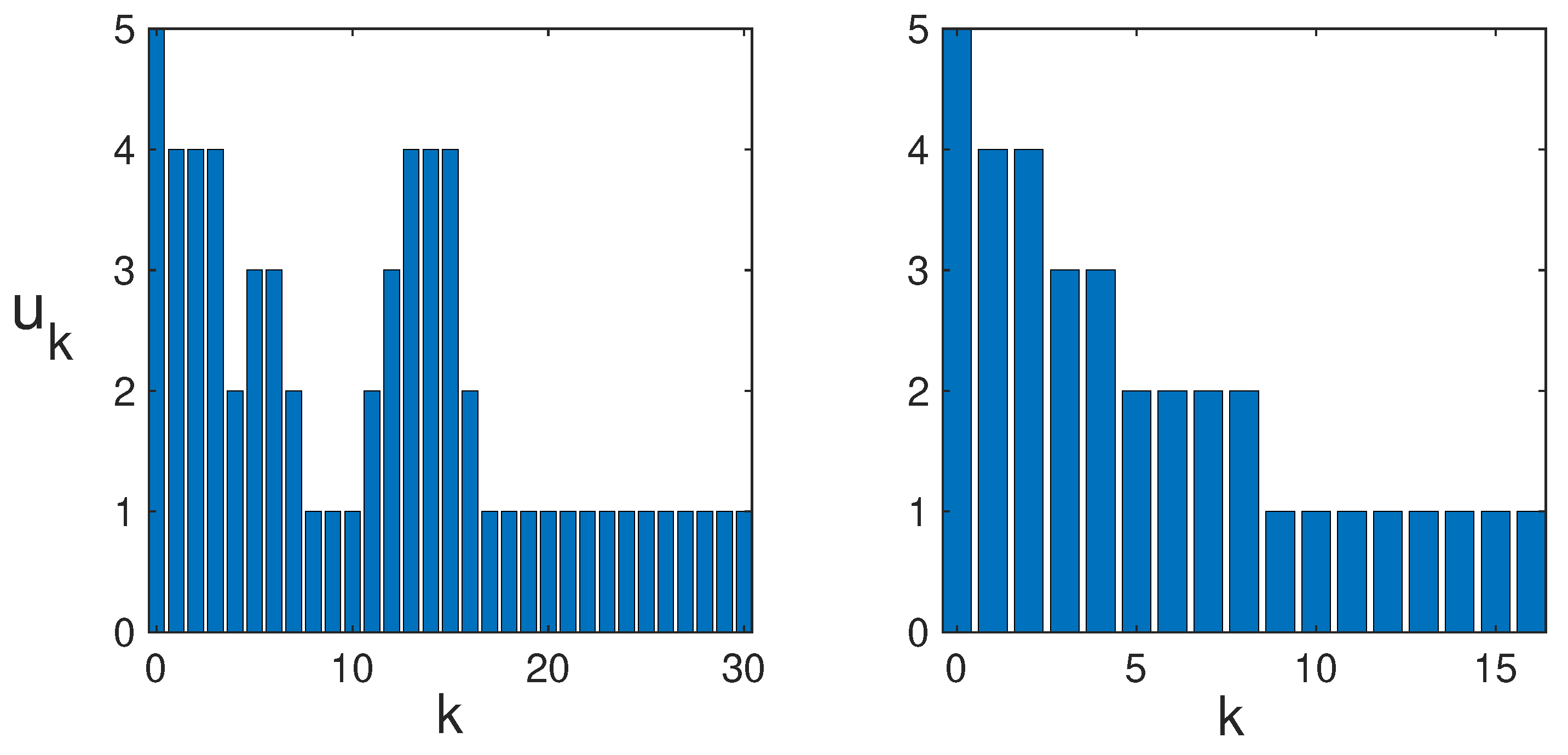
In
Figure 9, the time series of
is shown for both the rollout and greedy base policies.
Trade-offs leading to delayed information gains can clearly be seen for the rollout policy, where early measurements with lower entropy lead to later measurements with higher entropy, but not for the greedy base policy. These trade-offs are a sign of planning taking place in the rollout policy. It is interesting to note that while maximizing entropy always leads to a uniform probability distribution in the absence of external constraints, maximizing the entropy sequentially generally leads to a sequence of non-uniform probability distributions.
The rollout policy eventually fails when the grid size is increased beyond a certain range and the approximations lose their effectiveness. Note that dividing the grid into smaller sub-grids, then searching these sub-grids instead, generally does not help and will usually lead to more than the minimum number of measurements. This is due to redundant measurements from overlapping subproblems at the sub-grid boundaries. Dynamic programming specifically takes advantage of these overlapping subproblems to achieve optimality. However, the approximations used in approximate dynamic programming can be improved systematically: either by increasing the lookahead in the rollout algorithm, or by including additional steps of policy evaluation and policy improvement to go beyond rollout. Improvements to approximations are expected to extend planning to larger and larger grid sizes.
5. Dynamic Programming for Gaussian Processes
Gaussian processes [
2,
26,
27] are widely used for active sensing of environmental phenomena. Here, we give a variant of our DP algorithm that is applicable to Gaussian processes by specifically considering a robot transect sampling task similar to that described in Cao et al. [
14]. Alternative approaches to dynamic programming applied to Gaussian processes appear in Deisenroth et al. [
42].
In a robot transect sampling task, a robot changes its position
continuously while taking sensor measurements at a discrete set of locations
(i.e., one measurement per stage
k). The outcome of each measurement is determined by the random field
, which is a continuous random variable that varies continuously with robot position
. The probability distribution of
is assumed to be a Gaussian process (GP), meaning that any discrete set of outcomes
has a Gaussian probability density; and a corresponding covariance matrix. In order to derive a DP algorithm that is useful for GPs, it is therefore necessary to go beyond the assumption of independent measurement outcomes. Fortunately, this can be done with a simple modification to Algorithm 3 using the method of
state augmentation [
16].
A GP model for regression allows us to predict the location of where the next measurement should be taken, given all previous measurement locations. In this case, the probability density of measurement outcome
is:
where
In Equation (
34), we use the notation
to denote the sequence of all previous measurement outcomes, which are also used to form the column vector
in Equation (
35). The covariance matrix
depends on the covariance function
of the GP, and has elements
; where indices
i and
j run from 0 to
, and
is the noise variance. The parameter
is given by
, and the column vector
has elements
; where
is a column vector, and its transpose
is a row vector. The differential entropy of the GP is given by
, and depends only on past measurement locations but not on past measurement outcomes.
The DP recurrence relation can now be derived with reference to Equation (
16). Assumptions equivalent to Cao et al. [
14] include only one choice of measurement at each stage, and robot dynamics that is deterministic. These assumptions reduce Equation (
16) to Equation (
21), as in the case of “find the submarine”. Further,
and
play no role in this model, and so Equation (
21) further reduces to:
However, this recurrence relation is not quite right because we assumed independence to derive it. In particular, the entropy (the first term on the right-hand side) should be replaced by
from our GP model. This means the state given by
in Equation (
37) is no longer sufficient and must now be augmented by
to give the new state
. Therefore, the size of the state-space has increased substantially, and approximate DP methods like the one given below will generally be required. The corresponding DP recurrence relation is now written as
The DP algorithm corresponding to Equation (
38) now takes into account all past measurement locations
leading to
so that the entropy at stage
k may be found. At stage
k, the robot then chooses control
to reach the most informative measurement location
at the next stage. This leads to
for the argument of
.
The DP recurrence relation given by Equation (
38) is expected to give similar results when used in the rollout algorithm to the “approximate maximum entropy path planning” presented in Cao et al. [
14]. However, the strength of our DP framework is that it is more general, and therefore can be used to describe more diverse situations. For example, if the robot dynamics is stochastic instead of deterministic, we can simply appeal to Equation (
16) to get the following DP recurrence relation:
Alternatively, instead of considering a single random field, we might be interested in sensing several random fields simultaneously; such as the salinity and temperature of a water body. We then have more than one choice of sensor measurement available at each stage. Again, appealing to Equation (
16), we might choose to model this using the following DP recurrence relation:
where
and
might be the salinity and temperature fields, for example. In this case, possible measurement choices at each stage would include
,
, or
. Presumably, the default case is the measurement
where both salinity and temperature are measured simultaneously at each stage. However, in some circumstances there may be hard constraints on either the number of measurements possible at each stage, or the type of measurement that can be taken at each stage. This could be due to constraints on power consumption, storage of samples, sensor response times, etc. The DP recurrence relation given by Equation (
40) is able to properly account for these types of measurement constraints, as well as any kinematic constraints on the robot or vehicle. This is done through the constraint sets
and
, which depend on the robot position
at time
k. These are just three examples, but other possibilities for DP recurrence relations can also be derived from Equation (
16) under different modelling assumptions.
A modified version of Algorithm 3 is now proposed for solving a GP. Specifically, Lines 7–12 in Algorithm 3 are replaced with Lines 7–13 in Algorithm 5. The main change is the extra assignment on Line 8, which is necessary for prediction of the
ith stage entropy,
. On Line 13, the entropy predictions from stages
k to
are then added together and stored. An additional evaluation of
following Line 2 in Algorithm 3 is also required in order to define
on Line 13. Further slight modifications of Algorithm 3 may also be required, depending on the precise form of the DP recurrence relation considered. The assignment on Line 8 requires computation of
, which takes
time using exact matrix inversion. However, a tighter bound of
may be possible by recognizing that dependencies might only be appreciable between a subset of past locations
, rather than all past locations
: potentially leading to a much smaller matrix for
. The size of this subset will depend on the length-scale hyperparameters in the covariance function, as well as the distance between each sampling location (this tighter bound will not be realized in one-dimensional GP models where past sampling locations might be re-visited at later stages). In the best case, we can hope to gain a small constant-time overhead with each iteration, and the modified Algorithm 3 still scales as
in the deterministic case. If not, a further reduction in computational time is possible by replacing exact matrix inversion with one of the approximation methods discussed in Rasmussen and Williams [
26].
| Algorithm 5 Modified Stochastic Rollout for GPs |
- 7:
fortodo - 8:
- 9:
- 10:
- 11:
- 12:
end for - 13:
Store:
|













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}