

A Dual Blind Watermarking Method for 3D Models Based on Normal Features

Abstract
:1. Introduction
2. Algorithm Principle
3. Watermark Embedding
3.1. The Embedding of the First Watermark
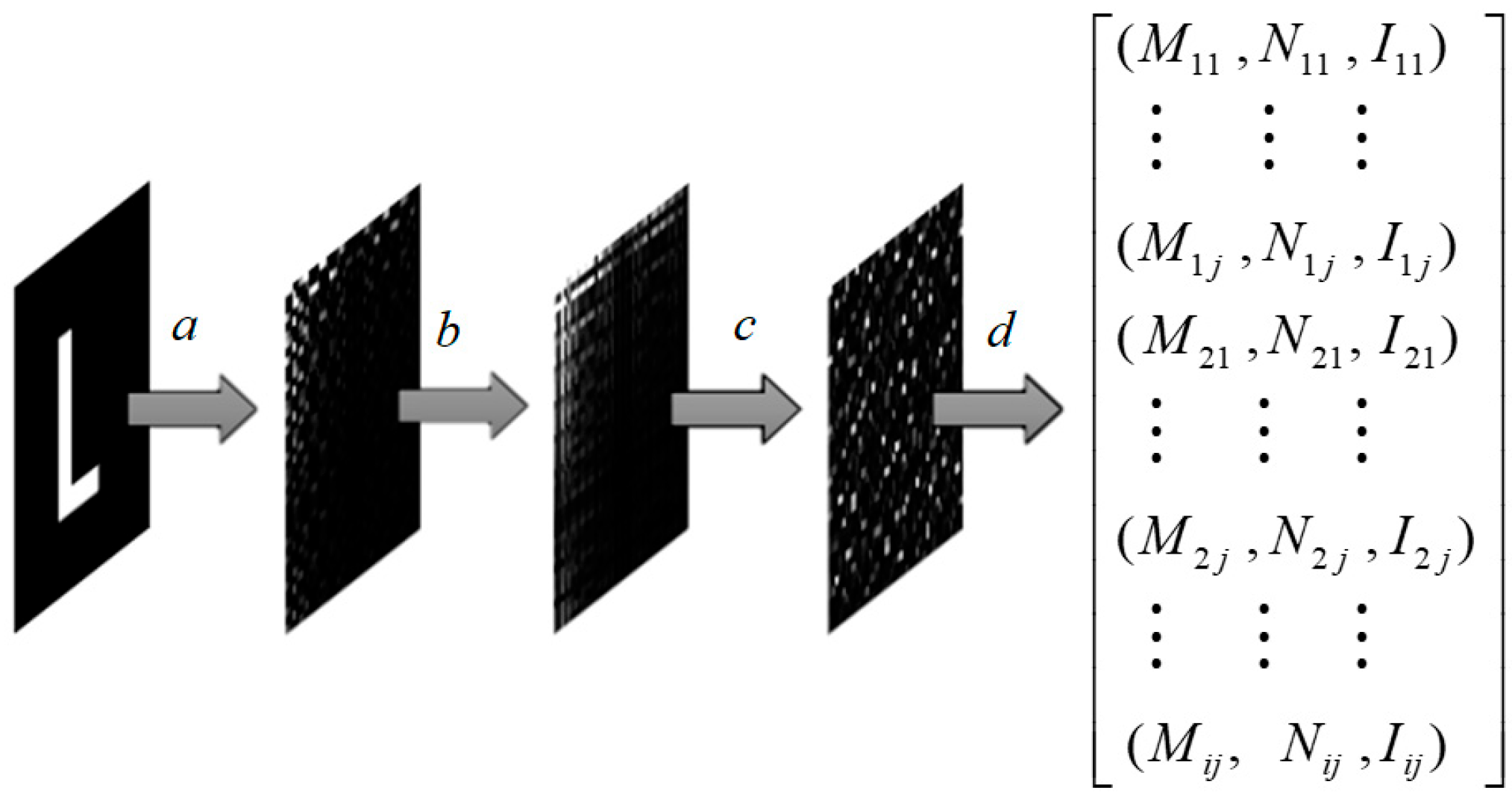
- (a)
- A discrete cosine transform is performed on the m × n binary watermark image to obtain the corresponding spectral matrix;
- (b)
- The positive and negative coefficient matrices of the transformation matrix are taken as the restoration key, denoted as key 1;
- (c)
- Arnold scrambling is applied to its absolute value matrix, resulting in matrix I, where the scrambling parameters serve as the restoration key, referred to as key 2;
- (d)
- It is necessary to perform index encoding and normalization on the scrambled matrix. As spherical coordinate values are chosen as the embedding carrier, the row and column indices of matrix elements need to be encoded into angle values. The encoding and normalization formulae for the matrix are as follows:
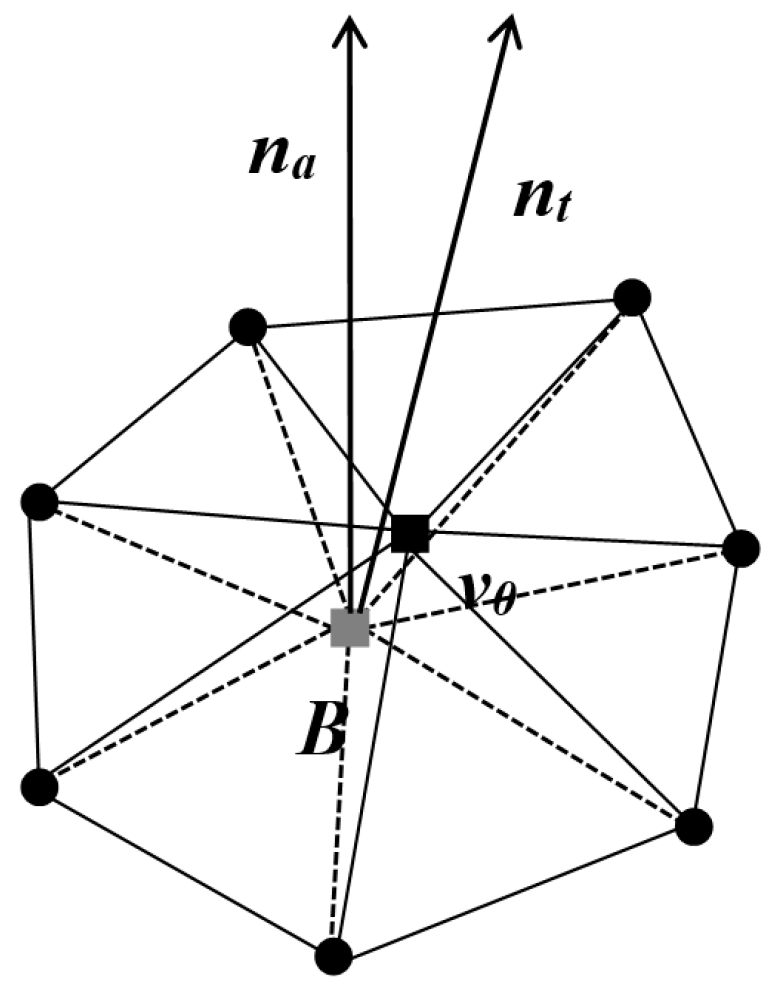
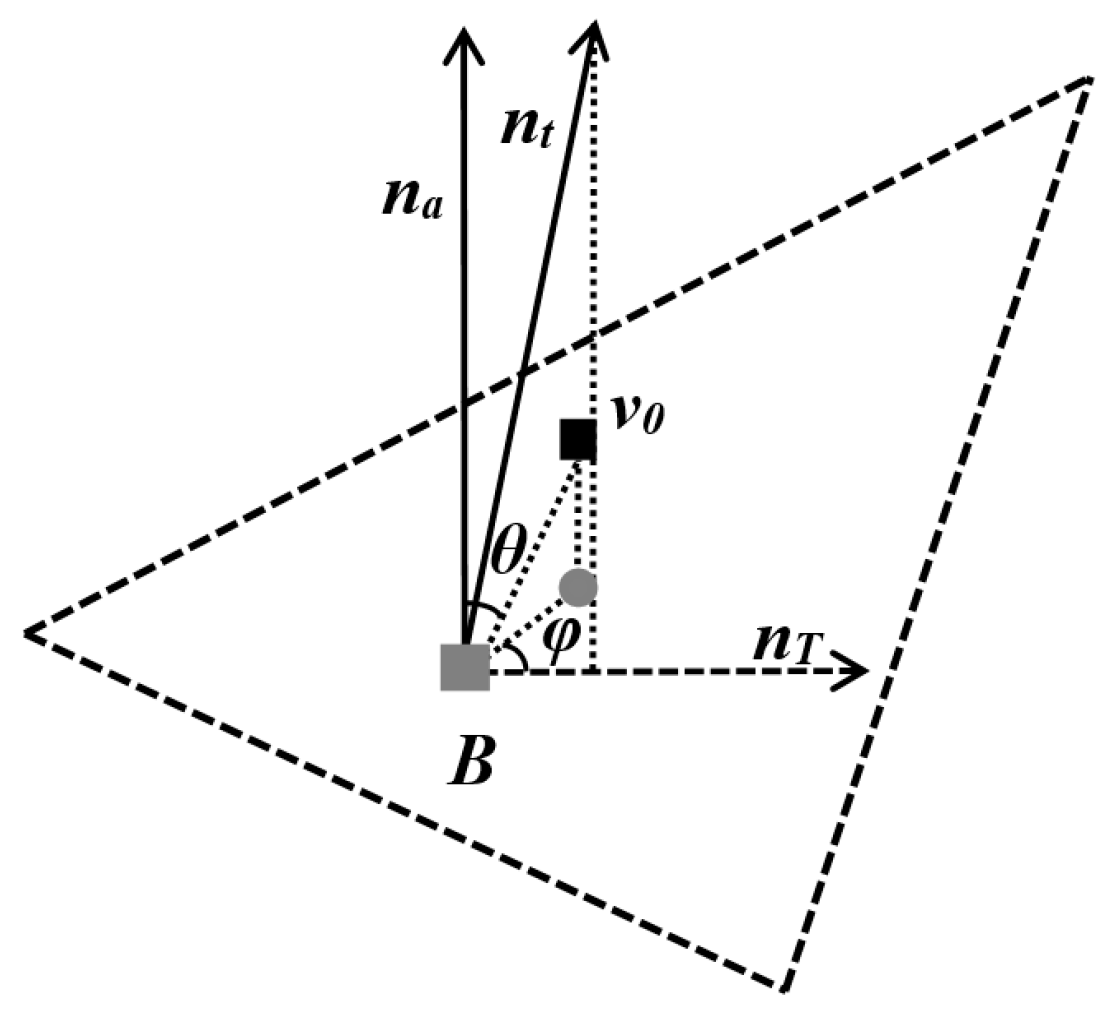
- 1.
- The centroid B of the first-ring neighboring points is calculated for each vertex, and the normal vectors and of the centroid point are computed. Let the angle between the two normal vectors be denoted as Φ = 〈〉. This Φ value is used as the first criterion for identifying key vertices, and it should be greater than a certain threshold value . The resulting set of vertices after filtering is denoted as V1.
- 2.
- Since we utilize the ratio of the distance from the vertices to the centroids of their first-ring neighbors, with the mean distance l as the embedding carrier, and considering watermark invisibility, it is necessary to impose constraints on the first-ring neighboring points of the vertex set V1. Let the set of distances between the vertex’s first-ring neighborhood centroid and its first-ring neighbors be denoted as L. The ratio of max(L) to min(L) should be less than the threshold value . After applying this filtering, the resulting vertex set is denoted as V2.
- 3.
- Feature vertices cannot be adjacent to each other. If they are, all feature vertices in the set V2 with neighbor relationships are removed. The final filtered set of feature vertices is denoted as V3.
3.2. The Embedding of the Second Watermark
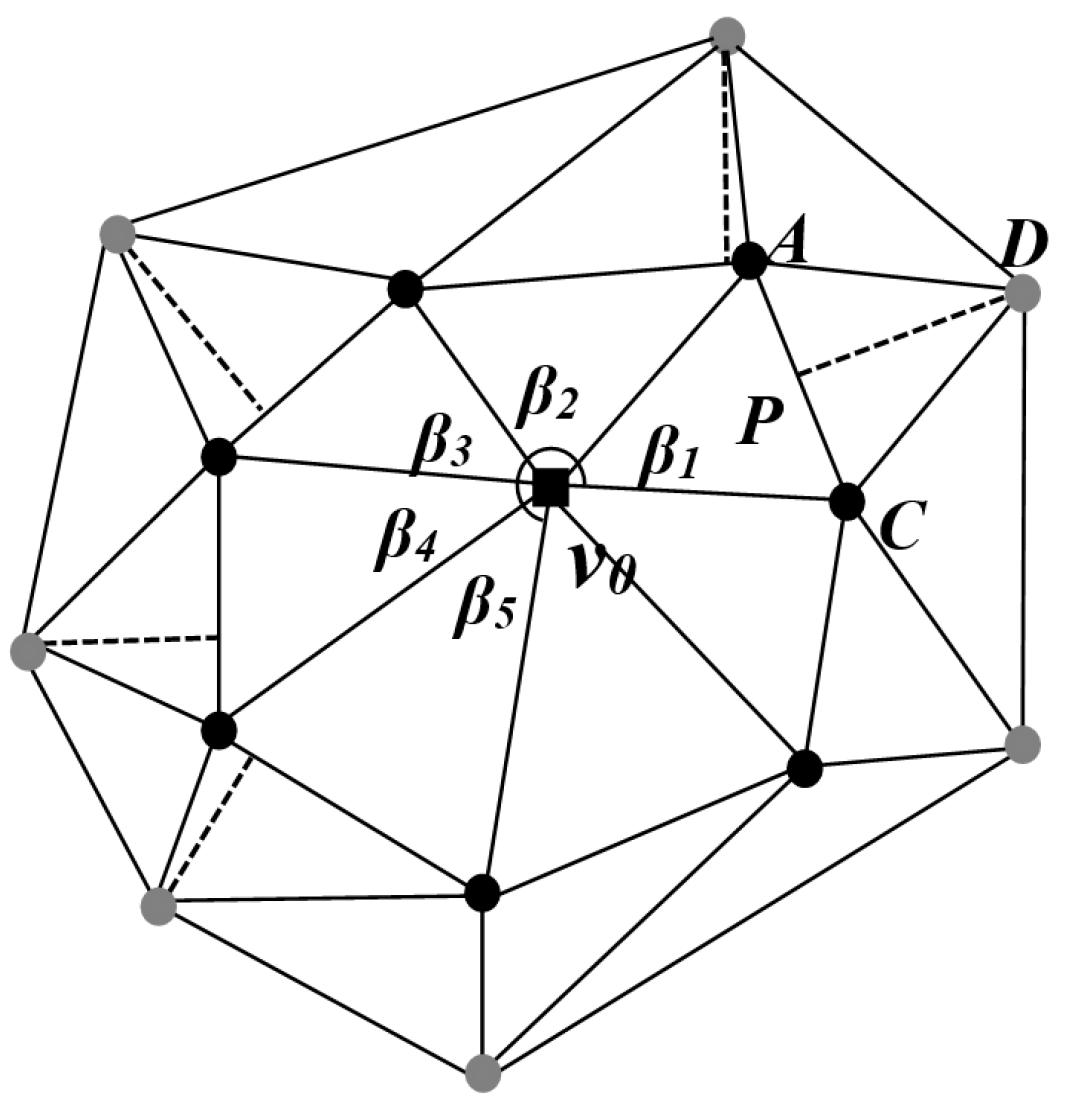
- (a)
- It must be connected topologically only to the two first-ring neighboring points of the base point.
- (b)
- The angle Φ between the centroid’s normal of its first-ring neighboring points must be less than a certain threshold. This threshold is the same as the one given in step b of the first watermark embedding process, denoted as “”. In other words, it is necessary to exclude the potential embedding points for the first watermark.
- (c)
- The angle Φ between the centroid’s normal of the first-ring neighboring points’ own first-ring neighboring points also needs to be less than the threshold “”, given in step b of the first watermark embedding process. This ensures that these points are not first-ring neighbors of vertices that have been embedded with the first watermark.
- (d)
- The triangle created by the base point and its two neighboring points in the first ring (with the edge formed by those two adjacent points as the base) must have both of its base angles measuring less than 90 degrees.
4. Watermark Detection
4.1. Extraction and Detection of the First-Level Watermark
4.2. Extraction and Detection of the Second-Level Watermark
5. Experimental Results and Analysis
- (1)
- Affine transformation and vertex reordering attacks
- (2)
- Cropping attack
- (3)
- Simplification Attack
- (4)
- Noise Attack
- (5)
- Smoothing Attack
- (6)
- Combined Attacks
- (7)
- Comparison with Similar Algorithms
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Cox, I.J.; Miller, M.; Bloom, J. Digital Watermarking and Steganography, 2nd ed.; The Morgan Kaufmann Series in Multimedia Information and Systems; Morgan Kaufmann: Cambridge, MA, USA, 2008; p. 7. [Google Scholar]
- Taleby Ahvanooey, M.; Li, Q.; Hou, J.; Rajput, A.R.; Chen, Y. Modern text hiding, text steganalysis, and applications: A comparative analysis. Entropy 2019, 21, 355. [Google Scholar] [CrossRef] [PubMed]
- Menendez-Ortiz, A.; Feregrino-Uribe, C.; Hasimoto-Beltran, R.; Garcia-Hernandez, J.J. A survey on reversible watermarking for multimedia content: A robustness overview. IEEE Access 2019, 7, 132662–132681. [Google Scholar] [CrossRef]
- Tiwari, A.; Srivastava, V.K. Image watermarking techniques based on Schur decomposition and various image invariant moments: A review. Multimed Tools Appl. 2023. [Google Scholar] [CrossRef]
- Bistroń, M.; Piotrowski, Z. Efficient video watermarking algorithm based on convolutional neural networks with entropy-based information mapper. Entropy 2023, 25, 284. [Google Scholar] [CrossRef]
- Wang, D.; Li, M.; Zhang, Y. Adversarial data hiding in digital images. Entropy 2022, 24, 749. [Google Scholar] [CrossRef]
- Wang, X.Y. Research on Digital Watermarking Techniques for Copyright Projection of Three-Dimensional Mesh Models. Ph.D. Dissertation, Jiangsu University, Zhenjiang, China, 2017. [Google Scholar]
- Sun, S.; Pan, Z.; Zhang, M.; Ye, L. A blind 3D model watermarking algorithm based on local coordinate system. J. Image Graph. 2007, 12, 289–294. [Google Scholar]
- Ohbuchi, R.; Masuda, H.; Aono, M. Watermarking three-dimensional polygonal models. In Proceedings of the ACM International Conference on Multimedia’97, Seattle, WA, USA, 9–13 November 1997; pp. 261–272. [Google Scholar]
- Kanai, S.; Date, H.; Kishinami, T. Digital watermarking for 3D polygons using multi-resolution wavelet decomposition. In Proceedings of the Sixth IFIP WG 5.2 International Workshop on Geometric Modeling: Fundamentals and Applications (GEO-6), Tokyo, Japan, 7–9 December 1998; pp. 296–307. [Google Scholar]
- Oliver, B. Geometry-Based Watermarking of 3D Models. IEEE Comput. Graph. Appl. 1999, 19, 46–55. [Google Scholar]
- Praun, E.; Hoppe, H.; Finkelstein, A. Robust mesh watermarking. In Proceedings of the 26th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH, Los Angeles, CA, USA, 8–13 August 1999; pp. 49–57. [Google Scholar]
- Yu, Z.Q.; Ip, H.H.; Kowk, L.F. Robust watermarking of 3D polygonal models based on vertex scrambling. In Proceedings of the Computer Graphics International Conference, Tokyo, Japan, 9–11 July 2003; pp. 254–257. [Google Scholar]
- Feng, X.Q.; Pan, Z.G.; Li, L. A multi-watermarking method for 3D meshes. J. Comput. Aided Des. Comput. Graph. 2010, 22, 17–23. [Google Scholar] [CrossRef]
- Harte, T.; Bors, A.G. Watermarking 3D models. In Proceedings of the International Conference on Image Processing IEEE, Rochester, NY, USA, 22–25 September 2002; pp. 661–664. [Google Scholar]
- Bors, A.G. Watermarking mesh-based representations of 3-D objects using local moments. IEEE Trans. Image Process. 2006, 15, 687–701. [Google Scholar] [CrossRef]
- Li, L.; Zhang, D.; Pan, Z.G.; Shi, J.Y.; Zhou, K.; Ye, K. Watermarking 3D mesh by spherical parameterization. Comput. Graph. 2004, 28, 981–989. [Google Scholar] [CrossRef]
- Cho, J.W.; Prost, R.; Jung, H.Y. An oblivious watermarking for 3-d polygonal meshes using distribution of vertex norms. IEEE Trans. Signal Process. 2007, 55, 142–155. [Google Scholar] [CrossRef]
- Choi, H.; Jang, H.; Son, J.; Lee, H. Blind 3D mesh watermarking based on cropping-resilient synchro. Multimed. Tools Appl. 2017, 76, 26695–26721. [Google Scholar] [CrossRef]
- Jang, H.; Choi, H.; Son, J.; Kim, D.; Hou, J.; Choi, S.; Lee, H. Cropping- resilient 3D mesh watermarking based on consistent segmentation and mesh steganalysis. Multimed. Tools Appl. 2018, 77, 5685–5712. [Google Scholar] [CrossRef]
- Hamidi, M.; Chetouani, A.; El Haziti, M.; El Hassouni, M.; Cherifi, H. Blind Robust 3D Mesh Watermarking Based on Mesh Saliency and Wavelet Transform for Copyright Protection. Information 2019, 10, 67. [Google Scholar] [CrossRef]
- Ferreira, F.; Lima, J. A robust 3D point cloud watermarking method based on the graph Fourier transform. Multimed. Tools Appl. 2020, 79, 1921–1950. [Google Scholar] [CrossRef]
- Wang, K.; Lavoue, G.; Denis, F.; Baskurt, A. A comprehensive survey on three-dimensional mesh watermarking. IEEE Trans. Multimed. 2008, 10, 1513–1527. [Google Scholar] [CrossRef]
- Van Rensburg, B.J.; Puteaux, P.; Puech, W.; Pedeboy, J.P. 3D object watermarking from data hiding in the homomorphic encrypted domain. ACM Trans. Multimed. Comput. Commun. Appl. 2023, 19, 175. [Google Scholar] [CrossRef]
- Lyu, W.L.; Cheng, L.; Yin, Z. High-capacity reversible data hiding in encrypted 3D mesh models based on multi-MSB prediction. Signal Process. 2022, 201, 108686. [Google Scholar] [CrossRef]
- Lee, J.; Liu, C.; Chen, Y.; Hung, W.; Li, B. Robust 3D mesh zero-watermarking based on spherical coordinate and Skewness measurement. Multimed. Tools Appl. 2021, 80, 25757–25772. [Google Scholar] [CrossRef]
- Wang, C. Exhaustive study on post effect processing of 3D image based on nonlinear digital watermarking algorithm. Nonlinear Eng. 2023, 12, 20220288. [Google Scholar] [CrossRef]
- Tang, B.; Kang, B.S.; Wang, G.D.; Kang, J.C.; Zhao, J.D. Dual digital blind watermark algorithm based on three-dimensional mesh model. Comput. Eng. 2012, 38, 119–122. [Google Scholar]
- Ren, S.; Cheng, H.; Fan, A. Dual information hiding algorithm based on the regularity of 3D mesh model. Optoelectron. Lett. 2022, 18, 559–565. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cropping Rate | Bunny | Dragon | Armadillo | |||
|---|---|---|---|---|---|---|
| cor1 | cor2 | cor1 | cor2 | cor1 | cor2 | |
| 15% | 0.8404 | 1 | 0.8127 | 1 | 0.8216 | 0.9113 |
| 30% | 0.7663 | 1 | 0.7223 | 1 | 0.7867 | 0.9010 |
| 45% | 0.7012 | 1 | 0.6501 | 1 | 0.6908 | 0.9000 |
| 60% | 0.5417 | 1 | 0.5564 | 1 | 0.6071 | 0.8547 |
| 75% | 0.4867 | 1 | 0.4491 | 1 | 0.4675 | 0.8081 |
| 90% | 0.3739 | 0.9344 | 0.2175 | 1 | 0.3714 | 0.8014 |
| Simplification Ratio | Bunny | Dragon | Armadillo | |||
|---|---|---|---|---|---|---|
| cor1 | cor2 | cor1 | cor2 | cor1 | cor2 | |
| 5% | 0.0717 | 0.9344 | 0.0888 | 1 | 0.0443 | 1 |
| 10% | 0.0949 | 0.8207 | 0.0160 | 0.9344 | 0.0247 | 0.9315 |
| 15% | 0.0627 | 0.5238 | 0.0132 | 0.7014 | 0.0079 | 0.6625 |
| 20% | 0.0062 | 0.3477 | 0.0035 | 0.6101 | 0.0017 | 0.5554 |
| 25% | 0.0013 | 0.2328 | 0.0290 | 0.4667 | 0.0012 | 0.3615 |
| Noise Intensity | Bunny | Dragon | Armadillo | |||
|---|---|---|---|---|---|---|
| cor1 | cor2 | cor1 | cor2 | cor1 | cor2 | |
| 0.5% | 0.0252 | 1 | 0.0688 | 1 | 0.0670 | 1 |
| 1% | 0.0040 | 1 | 0.0075 | 1 | 0.0413 | 0.9344 |
| 1.5% | 0.0022 | 1 | 0.0461 | 1 | 0.0052 | 0.9344 |
| 2% | 0.0057 | 1 | 0.0296 | 1 | 0.0208 | 0.7896 |
| Level of Smoothing | Bunny | Dragon | Armadillo | |||
|---|---|---|---|---|---|---|
| cor1 | cor2 | cor1 | cor2 | cor1 | cor2 | |
| 1 | 0.0008 | 0.9344 | 0.0271 | 0.6102 | 0.0073 | 0.6958 |
| 2 | 0.0025 | 0.7237 | 0.0039 | 0.3710 | 0.0037 | 0.5057 |
| 3 | 0.0257 | 0.6798 | 0.0460 | 0.3031 | 0.0138 | 0.3391 |
| 4 | 0.0255 | 0.7237 | 0.0107 | 0.2659 | 0.0060 | 0.2051 |
| Combined Attacks | Bunny | Dragon | Armadillo | |||
|---|---|---|---|---|---|---|
| cor1 | cor2 | cor1 | cor2 | cor1 | cor2 | |
| 2% noise + 15%cropping | 0.0023 | 1 | 0.0078 | 1 | 0.0212 | 0.9344 |
| 2% noise + 30% cropping | 0.0015 | 1 | 0.0081 | 1 | 0.0209 | 0.9344 |
| 2% noise + 45% cropping | 0.0021 | 1 | 0.0071 | 0.9344 | 0.0200 | 0.7984 |
| 2% noise + 60% cropping | 0.0008 | 0.9344 | 0.0065 | 0.8150 | 0.0012 | 0.7229 |
| Types of Attacks | Can It Resist Attacks? | |||||
|---|---|---|---|---|---|---|
| Method Proposed | Reference [8] | Reference [14] | Reference [28] | Reference [26] | Reference [27] | |
| Affine Transformation Attack | Yes | Yes | Yes | Yes | Yes | Yes |
| Non-uniform Scaling Attack | No | Yes | No | Yes | Yes | Yes |
| Cropping Attack | Yes | Yes | Yes | Yes | No | Yes |
| Noise Attack | Yes | Yes | No | Yes | Yes | No |
| Simplification Attack | Yes | No | No | No | Yes | No |
| Smoothing Attack | Yes | No | No | No | Yes | No |
| Noise and Cropping Combined Attack | Yes | No | No | No | No | No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Q.; Li, Y.; Wang, Q.; He, W.; Peng, X. A Dual Blind Watermarking Method for 3D Models Based on Normal Features. Entropy 2023, 25, 1369. https://doi.org/10.3390/e25101369
Tang Q, Li Y, Wang Q, He W, Peng X. A Dual Blind Watermarking Method for 3D Models Based on Normal Features. Entropy. 2023; 25(10):1369. https://doi.org/10.3390/e25101369
Chicago/Turabian StyleTang, Qijian, Yanfei Li, Qilei Wang, Wenqi He, and Xiang Peng. 2023. "A Dual Blind Watermarking Method for 3D Models Based on Normal Features" Entropy 25, no. 10: 1369. https://doi.org/10.3390/e25101369
APA StyleTang, Q., Li, Y., Wang, Q., He, W., & Peng, X. (2023). A Dual Blind Watermarking Method for 3D Models Based on Normal Features. Entropy, 25(10), 1369. https://doi.org/10.3390/e25101369