
On the Image Reconstruction of Capacitively Coupled Electrical Resistance Tomography (CCERT) with Entropy Priors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
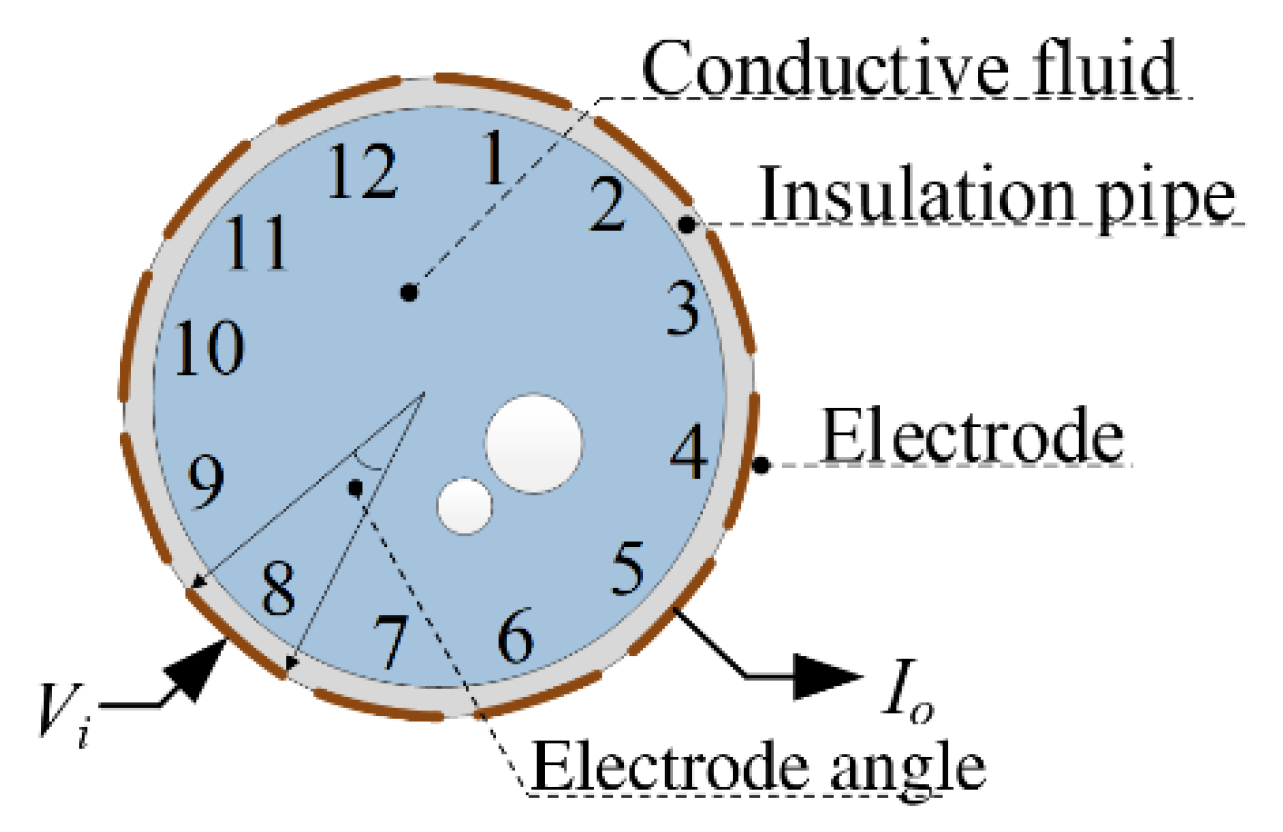
2.1. Measurement Principle of CCERT
2.2. Image Reconstruction with Regularization
2.3. Image Reconstruction with Entropy Priors
2.3.1. Regularization with Maximum Entropy (ME) Strategy
- (1)
- Maximum Image Entropy (MIE)
- (2)
- Maximum Projection Entropy (MPE)
- (3)
- Maximum Joint Entropy (MJE)
2.3.2. Regularization with Minimum Cross-Entropy (MCE) Strategy
2.3.3. Image Reconstruction Process
- Let the number of iterations and initialize the image vector .
- Calculate the gradient and set the initial iteration direction .
- Determine the step length by linear searching as .
- Calculate the new image vector .
- Calculate the new gradient .
- Update the iteration direction as .
- Set , if either of the termination conditions is satisfied, stop the iteration and let the final image vector to be . Otherwise, return to step 3.
- (1)
- (2)
- (3)
3. Results and Discussion
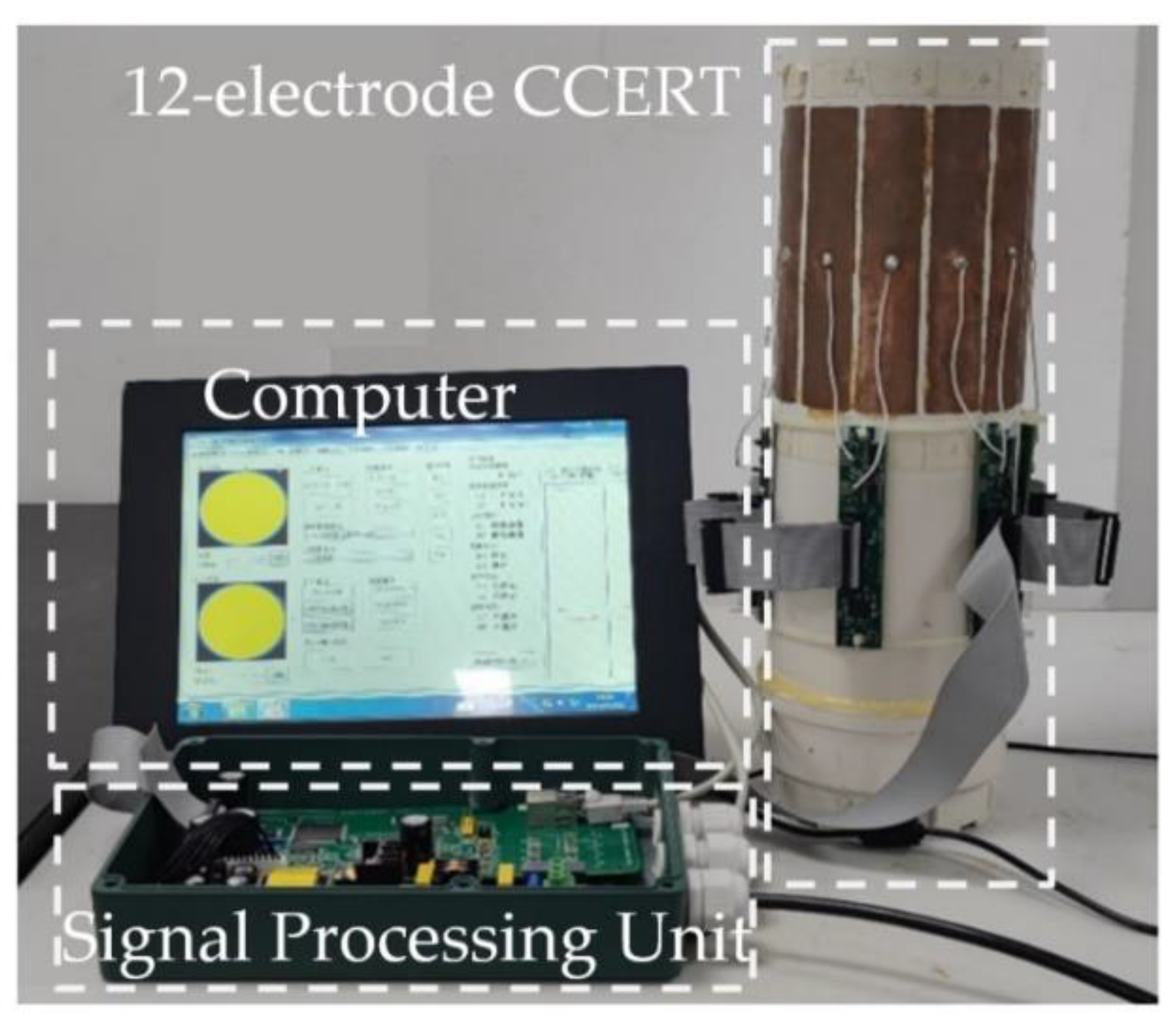
3.1. Experimental Setup
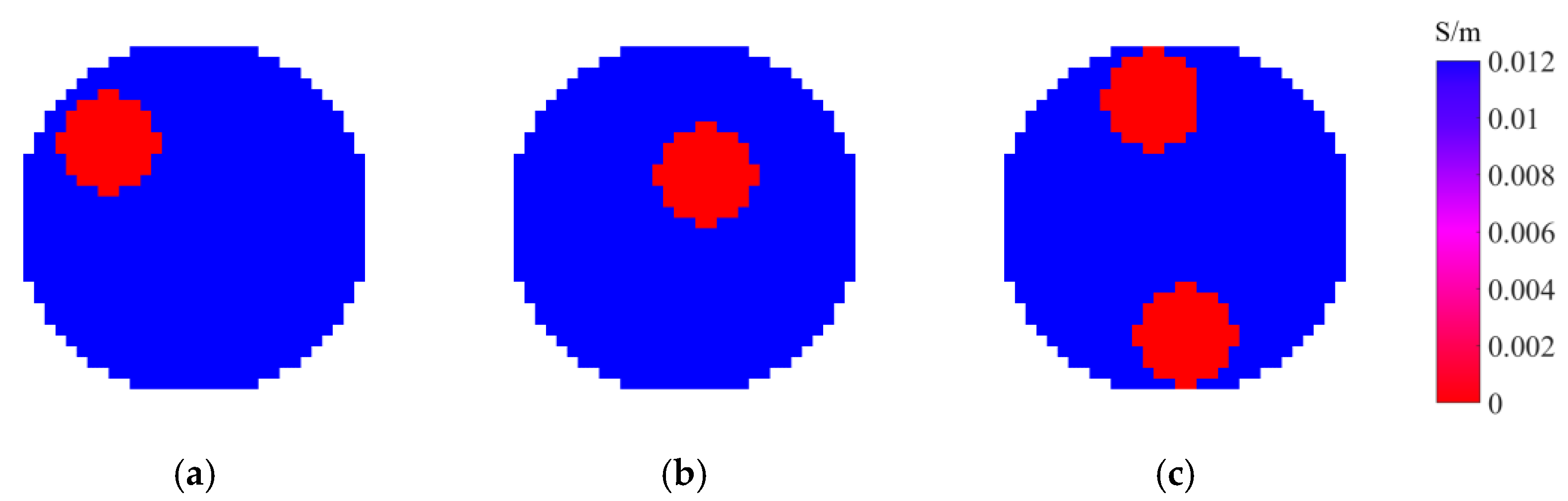
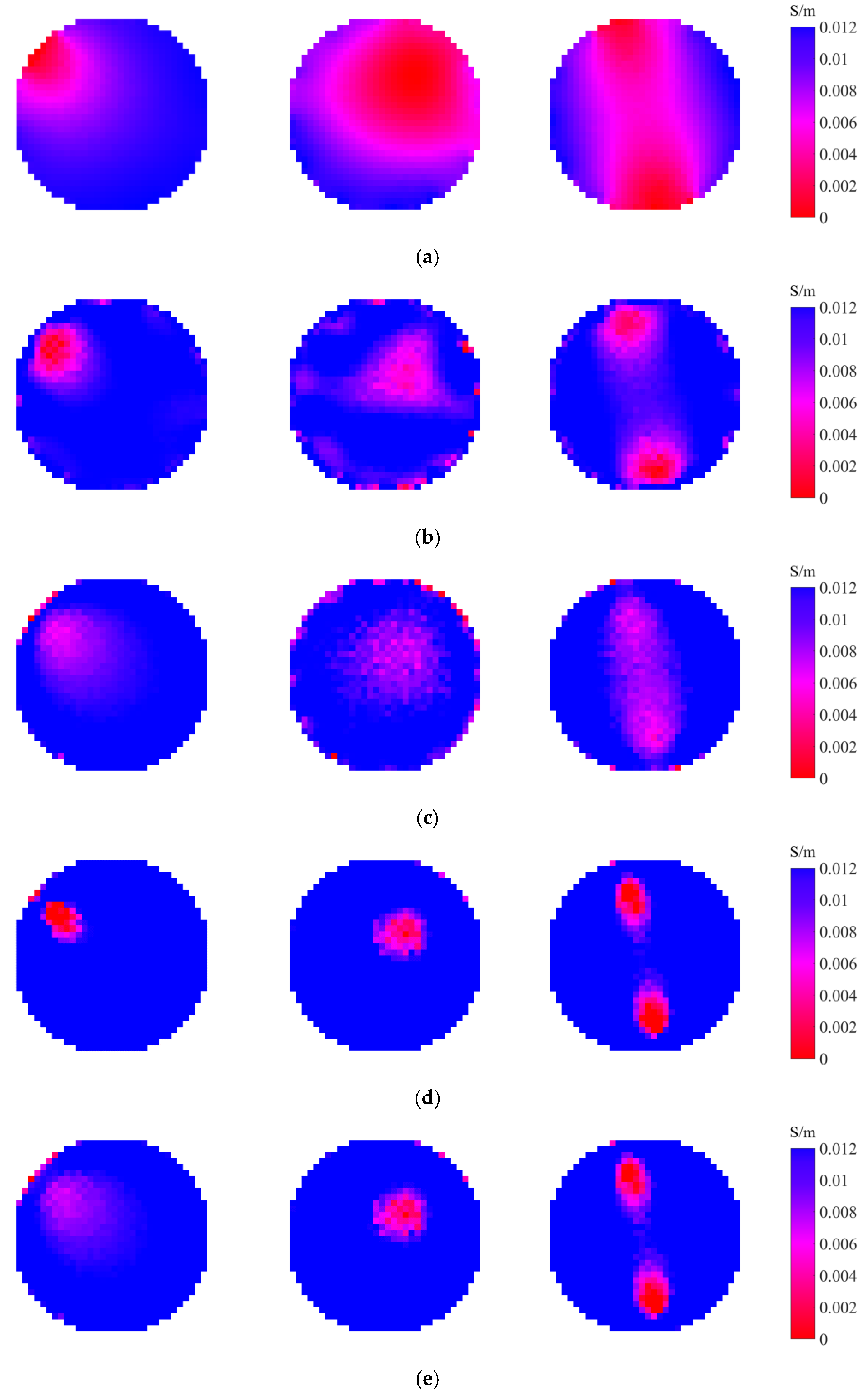
3.2. Experimental Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Crowe, C.T. Multiphase Flow Handbook; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Falcone, G.; Hewitt, G.F.; Alimonti, G.F. Multiphase Flow Metering; Elsevier: Oxford, UK, 2010. [Google Scholar]
- Tan, C.; Jia Zhao, J.; Dong, F. Gas–water two-phase flow characterization with electrical resistance tomography and multivariate multiscale entropy analysis. ISA Trans. 2015, 55, 241–249. [Google Scholar] [CrossRef] [PubMed]
- Aw, S.R.; Rahim, R.A.; Rahiman, M.H.F.; Yunus, F.R.M.; Goh, C.L. Electrical resistance tomography: A review of the application of conducting vessel walls. Powder Technol. 2014, 254, 256–264. [Google Scholar] [CrossRef]
- Wang, M. Industrial Tomography: Systems and Applications; Woodhead Publishing: Sawston, UK, 2015. [Google Scholar]
- Wahab, Y.A.; Rahim, R.A.; Rahiman, M.H.F.; Aw, S.R.; Yunus, F.R.M.; Goh, C.L.; Rahim, H.A.; Ling, L.P. Non-invasive process tomography in chemical mixtures—A review. Sens. Actuators B Chem. 2015, 210, 602–617. [Google Scholar] [CrossRef]
- Wang, B.; Hu, Y.; Ji, H.; Huang, Z.; Li, H. A novel electrical resistance tomography system based on C4D technique. IEEE Trans. Instrum. Meas. 2013, 62, 1017–1024. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, B.; Huang, Z.; Ji, H.; Li, H. New capacitively coupled electrical resistance tomography (CCERT) system. Meas. Sci. Technol. 2018, 29, 104007. [Google Scholar] [CrossRef]
- Wahab, Y.A.; Rahim, R.A.; Ling, L.P.; Rahiman, M.H.F.; Aw, S.R.; Yunus, F.R.M.; Rahim, H.A. Optimisation of electrode dimensions of ERT for non-invasive measurement applied for static liquid-gas regime identification. Sens. Actuators A Phys. 2018, 270, 50–64. [Google Scholar] [CrossRef]
- Yang, W.Q.; Peng, L. Image reconstruction algorithms for electrical capacitance tomography. Meas. Sci. Technol. 2002, 14, R1–R13. [Google Scholar] [CrossRef]
- Cui, Z. A review on image reconstruction algorithms for electrical capacitance/resistance tomography. Sens. Rev. 2016, 36, 429–445. [Google Scholar] [CrossRef]
- Jiang, Y.; Huang, J.; Ji, H.; Wang, B.; Huang, Z.; Soleimani, M. Study on dual-frequency imaging of capacitively coupled electrical impedance tomography: Frequency optimization. IEEE Trans. Instrum. Meas. 2022, 71, 1–18. [Google Scholar] [CrossRef]
- Chambolle, A.; Lions, P.L. Image recovery via total variation minimization and related problems. Numer. Math. 1997, 76, 167–188. [Google Scholar] [CrossRef]
- Johnston, P.R.; Gulrajani, R.M. Selecting the corner in the L-curve approach to Tikhonov regularization. IEEE Trans. Biomed. Eng. 2000, 47, 1293–1296. [Google Scholar] [CrossRef]
- Zhou, Z.; dos Santos, G.S.; Dowrick, T.; Avery, J.; Sun, Z.; Xu, H.; Holder, D.S. Comparison of total variation algorithms for electrical impedance tomography. Physiol. Meas. 2015, 36, 1193–1209. [Google Scholar] [CrossRef] [PubMed]
- Yan, H.; Wang, Y.; Wang, Y.; Zhou, Y. An ECT image reconstruction algorithm based on object-and-background adaptive regularization. Meas. Sci. Technol. 2020, 32, 015402. [Google Scholar] [CrossRef]
- Li, S.; Wang, H.; Liu, T.; Cui, Z.; Chen, J.N.; Xia, Z.; Guo, Q. A fast Tikhonov regularization method based on homotopic mapping for electrical resistance tomography. Rev. Sci. Instrum. 2022, 93, 043709. [Google Scholar] [CrossRef] [PubMed]
- Vauhkonen, M.; Vadasz, D.; Karjalainen, P.A.; Somersalo, E.; Kaipio, J.P. Tikhonov regularization and prior information in electrical impedance tomography. IEEE Trans. Med. Imaging 1998, 17, 285–293. [Google Scholar] [CrossRef] [PubMed]
- Watzenig, D.; Fox, C. A review of statistical modelling and inference for electrical capacitance tomography. Meas. Sci. Technol. 2009, 20, 052002. [Google Scholar] [CrossRef]
- Gull, S.F.; Newton, T.J. Maximum entropy tomography. Appl. Opt. 1986, 25, 156–160. [Google Scholar] [CrossRef]
- Denisova, N.V. Maximum-entropy-based tomography for gas and plasma diagnostics. J. Phys. D Appl. Phys. 1998, 31, 1888. [Google Scholar] [CrossRef]
- Wan, X.; Wang, P.; Zhang, Z.; Zhang, H. Fused entropy algorithm in optical computed tomography. Entropy 2014, 16, 943–952. [Google Scholar] [CrossRef]
- Prakash, J.; Mandal, S.; Razansky, D.; Ntziachristos, V. Maximum entropy based non-negative optoacoustic tomographic image reconstruction. IEEE Trans. Biomed. Eng. 2019, 66, 2604–2616. [Google Scholar] [CrossRef]
- Thomas, M.C.; Joy, A.T. Elements of Information Theory, 2nd ed.; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Som, S.; Hutton, B.F.; Braun, M. Properties of minimum cross-entropy reconstruction of emission tomography with anatomically based prior. IEEE Trans. Nucl. Sci. 1998, 45, 3014–3021. [Google Scholar] [CrossRef]
- Skoglund, U.; Öfverstedt, L.; Burnett, R.M.; Bricogne, G. Maximum-Entropy three-dimensional reconstruction with deconvolution of the contrast transfer function: A test application with adenovirus. J. Struct. Biol. 1996, 117, 173–188. [Google Scholar] [CrossRef] [PubMed]
- Wan, X.; Yi, J. Emission spectral tomography reconstruction based on maximum entropy interpolation. J. Light. Technol. 2009, 27, 780–785. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, H.; Hao, K.; Dai, P. Two-Phase Flow regime identification based on cross-entropy and information extension methods for computerized tomography. IEEE Trans. Instrum. Meas. 2011, 60, 488–495. [Google Scholar] [CrossRef]
- Barbuzza, R.; Clausse, A. Tomography reconstruction by entropy maximization with smoothing filtering. Inverse Probl. Sci. Eng. 2010, 18, 711–722. [Google Scholar] [CrossRef]
- Ardekani, B.A.; Braun, M.; Hutton, B.F.; Kanno, I.; Iida, H. Minimum cross-entropy reconstruction of PET images using prior anatomical information. Phys. Med. Biol. 1996, 41, 2497. [Google Scholar] [CrossRef]
- Mejia, J.; Ochoa, A.; Mederos, B. Reconstruction of PET images using cross-entropy and field of experts. Entropy 2019, 21, 83. [Google Scholar] [CrossRef]
- Mohammad-Djafari, A.; Demoment, G. Maximum entropy image reconstruction in X-ray and diffraction tomography. IEEE Trans. Med. Imaging 1988, 7, 345–354. [Google Scholar] [CrossRef]
- Mwambela, A.; Isaksen, Ø.; Johansen, G. The use of entropic thresholding methods in reconstruction of capacitance tomography data. Chem. Eng. Sci. 1997, 52, 2149–2159. [Google Scholar] [CrossRef]
- Fan, W.; Wang, H. Maximum entropy regularization method for electrical impedance tomography combined with a normalized sensitivity map. Flow Meas. Instrum. 2010, 21, 277–283. [Google Scholar] [CrossRef]
- Wang, M.; Liu, S.; Liang, Y. Bayesian maximum entropy applied to fluid measurement. J. Phys. Conf. Ser. 2018, 1064, 012070. [Google Scholar] [CrossRef]
- Arora, R.K. Optimization: Algorithms and Applications; Chapman and Hall: Boca Raton, FL, USA; CRC: Boca Raton, FL, USA, 2015. [Google Scholar]
- Simon, D. Evolutionary Optimization Algorithms: Biologically-Inspired and Population-Based Approaches to Computer Intelligence; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Ye, J.; Wang, H.; Yang, W. Characterization of a multi-plane electrical capacitance tomography sensor with different numbers of electrodes. Meas. Sci. Technol. 2016, 27, 035103. [Google Scholar] [CrossRef]
- Shen, J.; Meng, S.; Wang, J.; Yang, W.; Ye, M. Study on the shape of staggered electrodes for 3-D electrical capacitance tomography sensors. IEEE Trans. Instrum. Meas. 2020, 70, 1–10. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, Z.; Soleimani, M.; Jiang, Y.; Ji, H.; Wang, B. On the Image Reconstruction of Capacitively Coupled Electrical Resistance Tomography (CCERT) with Entropy Priors. Entropy 2023, 25, 148. https://doi.org/10.3390/e25010148
Su Z, Soleimani M, Jiang Y, Ji H, Wang B. On the Image Reconstruction of Capacitively Coupled Electrical Resistance Tomography (CCERT) with Entropy Priors. Entropy. 2023; 25(1):148. https://doi.org/10.3390/e25010148
Chicago/Turabian StyleSu, Zenglan, Manuchehr Soleimani, Yandan Jiang, Haifeng Ji, and Baoliang Wang. 2023. "On the Image Reconstruction of Capacitively Coupled Electrical Resistance Tomography (CCERT) with Entropy Priors" Entropy 25, no. 1: 148. https://doi.org/10.3390/e25010148
APA StyleSu, Z., Soleimani, M., Jiang, Y., Ji, H., & Wang, B. (2023). On the Image Reconstruction of Capacitively Coupled Electrical Resistance Tomography (CCERT) with Entropy Priors. Entropy, 25(1), 148. https://doi.org/10.3390/e25010148