Generalized Maximum Complex Correntropy Augmented Adaptive IIR Filtering


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Augmented IIR System
3. Generalized Complex Correntropy and GMCCC-AIIR Algorithm
3.1. Generalized Complex Correntropy
- When , is convex at any with ;
- When , is non-convex at any with .
3.2. GMCCC-AIIR Algorithm
3.3. GMCCC-AIIR as a Generalization of ACA-IIR and ACLMS
Reduce the Computational Complexity of AGMCCC-IIR
4. Convergence of AGMCCC-IIR
5. Simulation
5.1. Complex Non-Gaussian Noise Models
5.1.1. Mixed Gaussian Noise
5.1.2. Alpha-Stable Noise
5.1.3. Cauchy Noise
5.1.4. Student’s T Noise
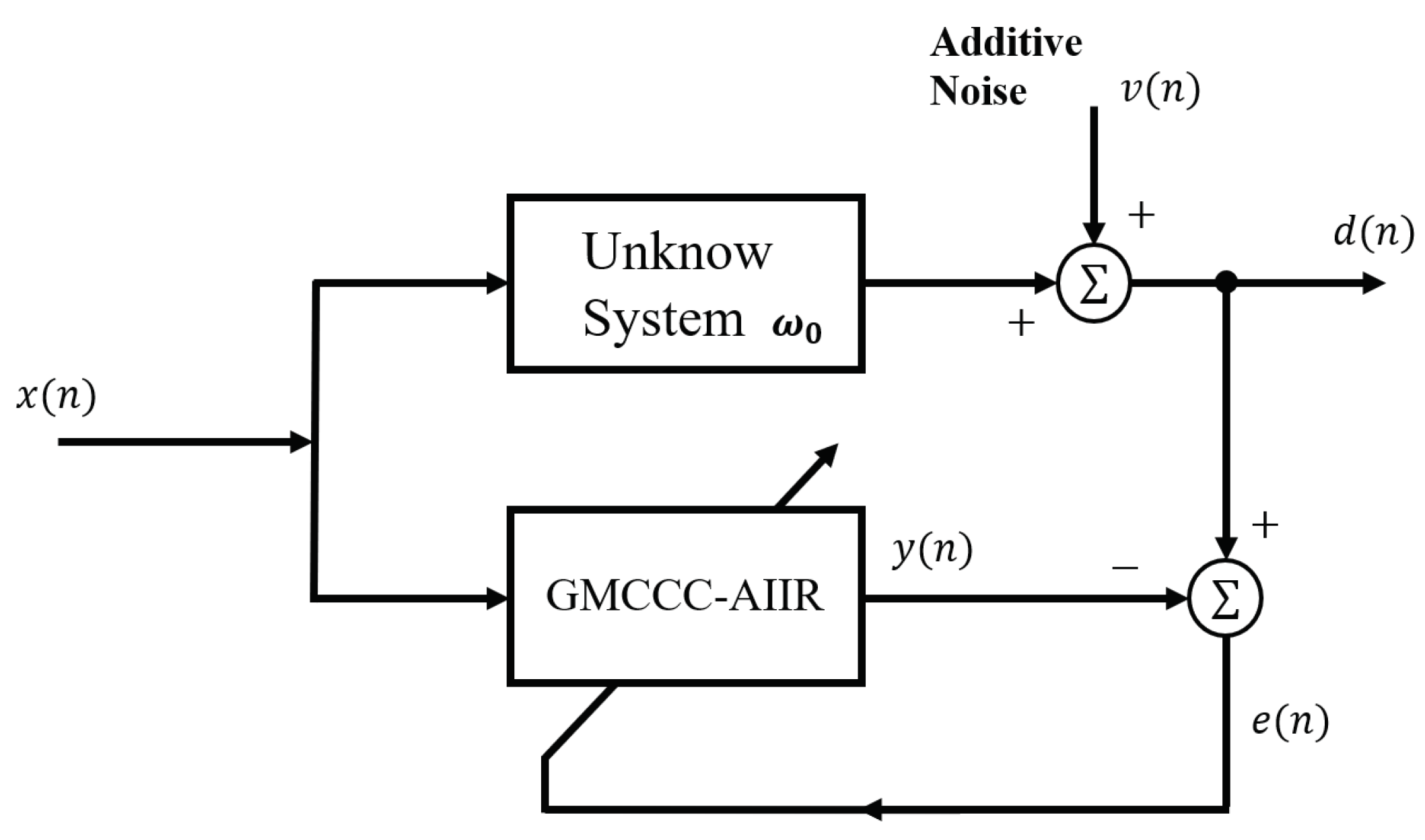
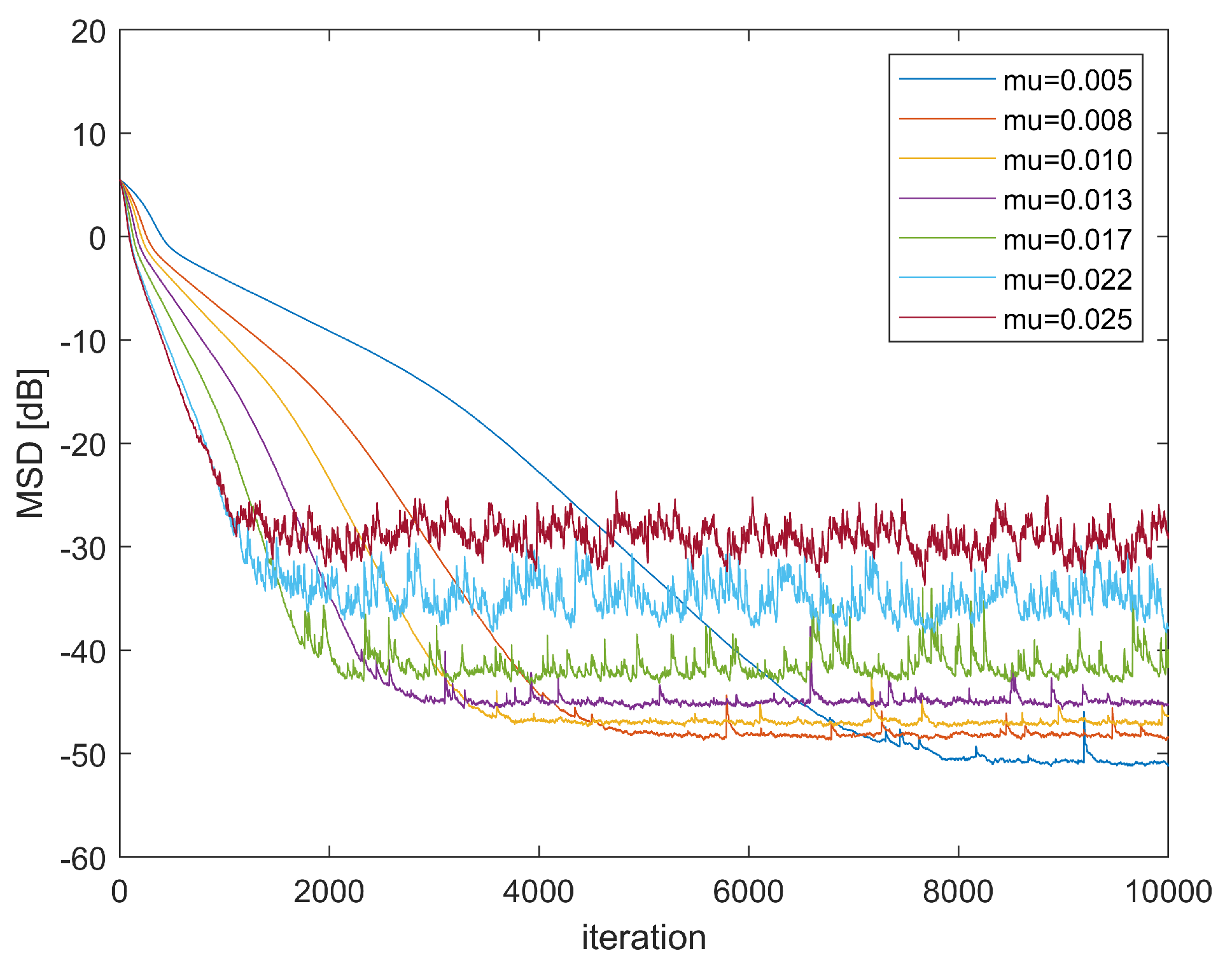
5.2. Augmented Linear System Identification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pascual Campo, P.; Anttila, L.; Korpi, D.; Valkama, M. Cascaded Spline-Based Models for Complex Nonlinear Systems: Methods and Applications. IEEE Trans. Signal Process. 2021, 69, 370–384. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, J.; Zhang, S. Complex-valued proportionate affine projection Versoria algorithms and their combined-step-size variants for sparse system identification under impulsive noises. Digit. Signal Process. 2021, 118, 103209. [Google Scholar] [CrossRef]
- Mandic, D.P.; Goh, V.S.L. Complex valued nonlinear adaptive filters: Noncircularity, widely linear and neural models. In Adaptive and Learning Systems for Signal Processing, Communications, and Control; Wiley: Chichester, UK, 2009. [Google Scholar]
- Javidi, S.; Pedzisz, M.; Goh, S.L.; Mandic, D. The Augmented Complex Least Mean Square Algorithm with Application to Adaptive Prediction Problems; Citeseer: Princeton, NJ, USA, 2008; p. 4. [Google Scholar]
- Took, C.C.; Mandic, D.P. Adaptive IIR Filtering of Noncircular Complex Signals. IEEE Trans. Signal Process. 2009, 57, 4111–4118. [Google Scholar] [CrossRef]
- Khalili, A. Diffusion augmented complex adaptive IIR algorithm for training widely linear ARMA models. Signal Image Video Process. 2018, 12, 1079–1086. [Google Scholar] [CrossRef]
- Khalili, A.; Rastegarnia, A.; Bazzi, W.M.; Rahmati, R.G. Incremental augmented complex adaptive IIR algorithm for training widely linear ARMA model. Signal Image Video Process. 2017, 11, 493–500. [Google Scholar] [CrossRef]
- Sayed, A.H. Fundamentals of Adaptive Filtering; IEEE Press Wiley-Interscience: New York, NY, USA, 2003. [Google Scholar]
- Chen, B.; Zhu, Y.; Hu, J.; Príncipe, J.C. System Parameter Identification: Information Criteria and Algorithms, 1st ed.; Elsevier: London, UK; Waltham, MA, USA, 2013. [Google Scholar]
- Principe, J.C.; Xu, D.; Iii, J.W.F. Information-Theoretic Learning; Springer: Berlin/Heidelberg, Germany, 2010; p. 62. [Google Scholar]
- Plataniotis, K.N.; Androutsos, D.; Venetsanopoulos, A.N. Nonlinear Filtering of Non-Gaussian Noise. J. Intell. Robot. Syst. 1997, 19, 207–231. [Google Scholar] [CrossRef]
- Weng, B.; Barner, K. Nonlinear system identification in impulsive environments. IEEE Trans. Signal Process. 2005, 53, 2588–2594. [Google Scholar] [CrossRef]
- Schimmack, M.; Mercorelli, P. An on-line orthogonal wavelet denoising algorithm for high-resolution surface scans. J. Frankl. Inst. 2018, 355, 9245–9270. [Google Scholar] [CrossRef]
- Liu, W.; Pokharel, P.P.; Principe, J.C. Correntropy: Properties and Applications in Non-Gaussian Signal Processing. IEEE Trans. Signal Process. 2007, 55, 5286–5298. [Google Scholar] [CrossRef]
- Liu, X.; Chen, B.; Zhao, H.; Qin, J.; Cao, J. Maximum Correntropy Kalman Filter With State Constraints. IEEE Access 2017, 5, 25846–25853. [Google Scholar] [CrossRef]
- He, Y.; Wang, F.; Yang, J.; Rong, H.; Chen, B. Kernel adaptive filtering under generalized Maximum Correntropy Criterion. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 1738–1745. [Google Scholar] [CrossRef]
- Chen, B.; Xing, L.; Zhao, H.; Zheng, N.; Príncipe, J.C. Generalized Correntropy for Robust Adaptive Filtering. IEEE Trans. Signal Process. 2016, 64, 3376–3387. [Google Scholar] [CrossRef] [Green Version]
- Qian, G.; Wang, S. Generalized Complex Correntropy: Application to Adaptive Filtering of Complex Data. IEEE Access 2018, 6, 19113–19120. [Google Scholar] [CrossRef]
- Li, K.; Principe, J.C. Functional Bayesian Filter. IEEE Trans. Signal Process. 2022, 70, 57–71. [Google Scholar] [CrossRef]
- Navarro-Moreno, J. ARMA Prediction of Widely Linear Systems by Using the Innovations Algorithm. IEEE Trans. Signal Process. 2008, 56, 3061–3068. [Google Scholar] [CrossRef]
- Picinbono, B.; Chevalier, P. Widely linear estimation with complex data. IEEE Trans. Signal Process. 1995, 43, 2030–2033. [Google Scholar] [CrossRef]
- Mandic, D.; Javidi, S.; Goh, S.; Kuh, A.; Aihara, K. Complex-valued prediction of wind profile using augmented complex statistics. Renew. Energy 2009, 34, 196–201. [Google Scholar] [CrossRef]
- Guimarães, J.P.F.; Fontes, A.I.R.; Rego, J.B.A.; de M. Martins, A.; Príncipe, J.C. Complex Correntropy: Probabilistic Interpretation and Application to Complex-Valued Data. IEEE Signal Process. Lett. 2017, 24, 42–45. [Google Scholar] [CrossRef]
- Shynk, J. A complex adaptive algorithm for IIR filtering. IEEE Trans. Acoust. Speech Signal Process. 1986, 34, 1342–1344. [Google Scholar] [CrossRef]
- Zhao, S.; Chen, B.; Príncipe, J.C. Kernel adaptive filtering with maximum correntropy criterion. In Proceedings of the 2011 International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011; pp. 2012–2017. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Qiu, T.; Song, A.; Tang, H. A novel correntropy based DOA estimation algorithm in impulsive noise environments. Signal Process. 2014, 104, 346–357. [Google Scholar] [CrossRef]
- Wu, Z.; Peng, S.; Chen, B.; Zhao, H. Robust Hammerstein Adaptive Filtering under Maximum Correntropy Criterion. Entropy 2015, 17, 7149–7166. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Xing, L.; Liang, J.; Zheng, N.; Príncipe, J.C. Steady-State Mean-Square Error Analysis for Adaptive Filtering under the Maximum Correntropy Criterion. IEEE Signal Process. Lett. 2014, 21, 880–884. [Google Scholar] [CrossRef]
- Wang, J.; Dong, P.; Shen, K.; Song, X.; Wang, X. Distributed Consensus Student-t Filter for Sensor Networks With Heavy-Tailed Process and Measurement Noises. IEEE Access 2020, 8, 167865–167874. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, H.; Qian, G. Generalized Maximum Complex Correntropy Augmented Adaptive IIR Filtering. Entropy 2022, 24, 1008. https://doi.org/10.3390/e24071008
Zheng H, Qian G. Generalized Maximum Complex Correntropy Augmented Adaptive IIR Filtering. Entropy. 2022; 24(7):1008. https://doi.org/10.3390/e24071008
Chicago/Turabian StyleZheng, Haotian, and Guobing Qian. 2022. "Generalized Maximum Complex Correntropy Augmented Adaptive IIR Filtering" Entropy 24, no. 7: 1008. https://doi.org/10.3390/e24071008
APA StyleZheng, H., & Qian, G. (2022). Generalized Maximum Complex Correntropy Augmented Adaptive IIR Filtering. Entropy, 24(7), 1008. https://doi.org/10.3390/e24071008