In the following, we aim to characterize these networks by the amount of sensing enhancement that can be achieved on them. For this purpose, we typically run numerical experiments that directly simulate the stochastic process of sensing and belief change, as detailed in
Section 2, and obtain averaged results from between
and
updates (depending on
u). In many of the experiments described below, we are interested in the maximum sensing enhancement achievable on a class of networks. In these, we assume that agents have optimally “tuned” their sensing intensities. Accordingly, we run simulations for a range of sensing intensities to determine
and approximate
, where
denotes the maximum fraction of the population that can sense correctly, and
denotes the sensing intensity at which this value of
can be realised. We then determine
and
for individual networks and then report the averages of these values over samples from the respective class of network.
As the numerics are relatively costly, experiments presented below are typically evaluated for networks of size and—unless otherwise mentioned—averages are calculated over 20 network realisations. When exploring parameter dependencies, we typically focus on a low sensing accuracy close to to investigate sensing enhancement that can be achieved in very adverse settings, when correct sensing only has a small advantage over random selection.
4.1. Sensing Enhancement in Binary Environments
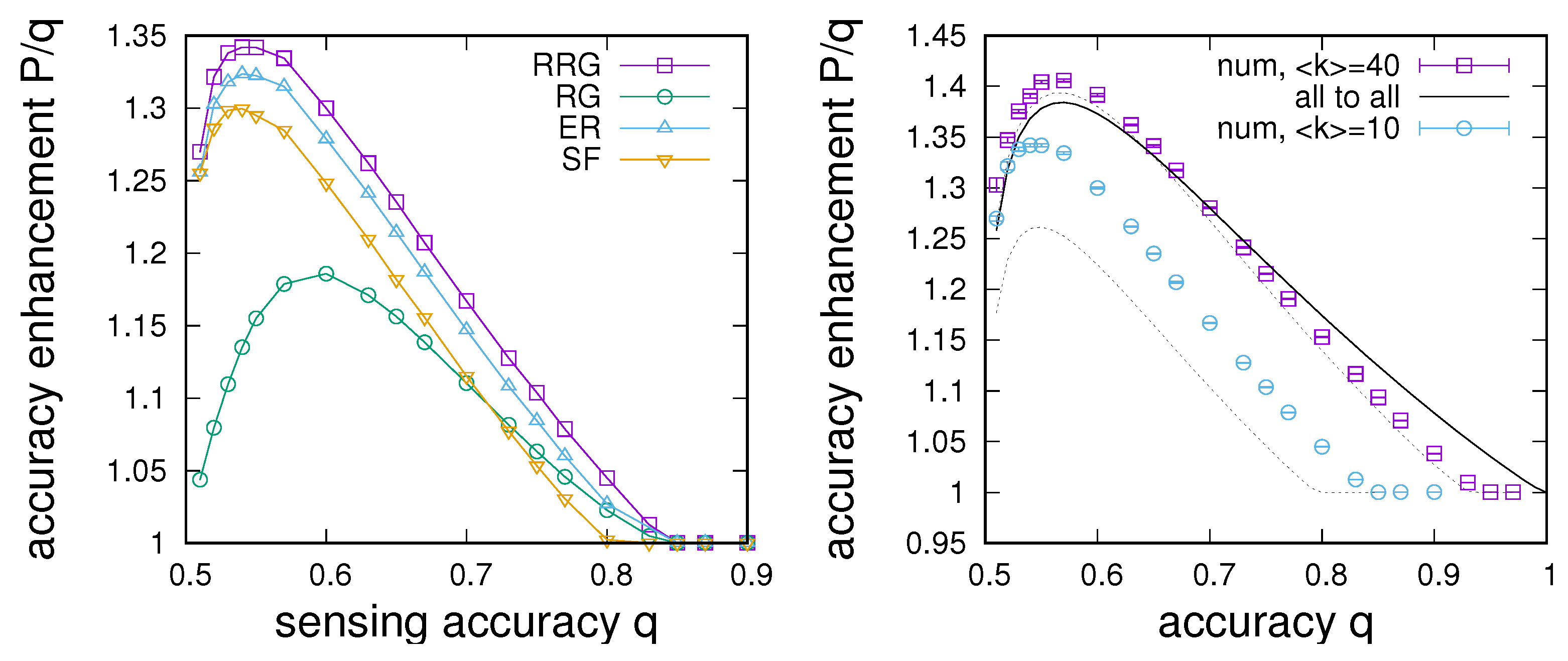
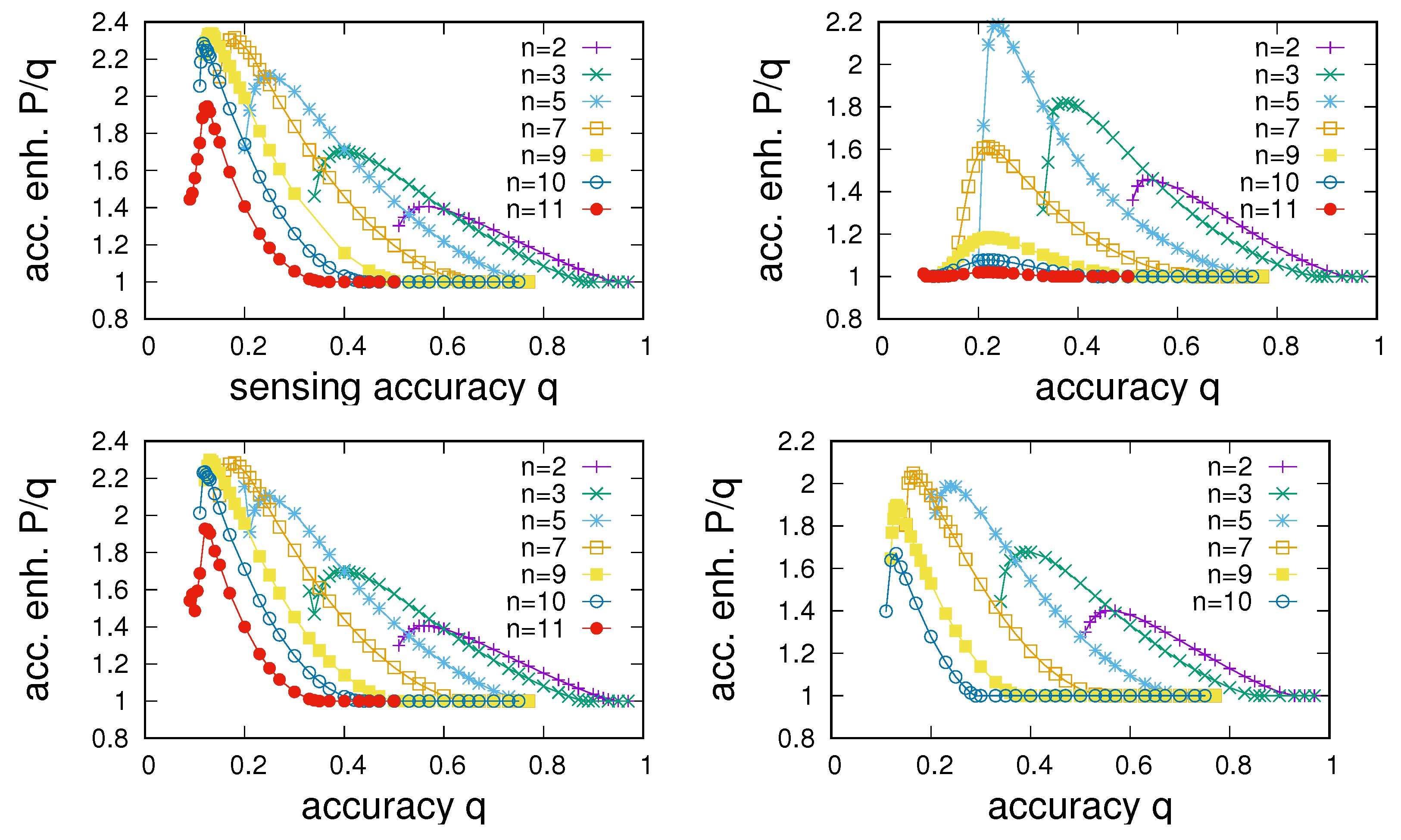
As an initial experiment, we are interested in comparisons of the dependence of sensing enhancement on sensing accuracy between different networks. For this purpose, maximum sensing enhancements
have been determined for different sensing accuracies for the four classes of networks discussed above. Results are summarised in
Figure 2, where we report maximum sensing enhancements relative to sensing accuracies, i.e.,
as a function of
q. More specifically, the left-hand panel of
Figure 2 shows the dependence of
for networks with
for
and
. We note that the possible sensing enhancement as a function of
q typically has a maximum for low
q, allowing for an up to
improvement in sensing accuracy depending on the network topology. Additionally, depending on the network structure, sensing enhancement is only possible for a limited range of sensing accuracies, and there typically is a sensing accuracy
above which sensing enhancement is no longer possible (note the points where
in the right-hand panel of
Figure 2). Comparing the four different network topologies, we find the largest sensing enhancement for RRGs at around
, a somewhat lower enhancement for ER with
and SF networks with
, and the lowest enhancement for RGs with
. The corresponding enhancement cut-offs are
for RRGs, ERs, and RGs and
for SF networks.
Whilst the mean-field description above does not account for sparse connectivities, numerical results (discussed later) show a clear dependence of optimal sensing points on the average degree. To include this effect, we develop a mean-field approximation for finite connectivities that essentially factor in through the exact configurations of states in an agent’s neighbourhood. This effect can be accommodated by modifying Equation (
5) via
where sums extend over all
, where
represents the number of neighbours holding state
i at time
t such that
, and
k is the connectivity of the network. Evaluating the combinatorics in Expression (
9) proves to be computationally too expensive for large
n and
k, but can be reasonably accommodated for
, where the first expression in (
9) transforms to
Note that the formulations in Equations (
9) and (
10) assume that all nodes of the graph have roughly equal degrees, and
j in (
10) represents the number of neighbours in state
. Equation (
10) can then be used to adapt Equation (
5) for limited degrees and can be inserted into Equation (
8) to yield estimates for the fraction of agents in the possession of correct information. Estimates based on Equation (
10) are compared to numerical data in the right-hand panel of
Figure 2, where we see that, whereas there are considerable differences between mean-field estimates and numerical data for small connectivity, reasonable agreement is found for connectivities above around
, and the main trends of the dependencies in the numerical data are captured by the limited connectivity mean-field approach (dotted lines). This contrasts with the all-to-all-coupling-based mean-field approach (solid line), which fails to account for the observed limited range of sensing accuracies up to
for which consensus enhancement is possible.
We thus see that the structure of the social network connecting a population can have a strong impact on achievable sensing enhancement. Results presented in
Figure 2 (left) suggest that, in otherwise random networks, heterogeneity plays a major role, seemingly impeding sensing enhancement. However, comparison between results for RRGs and RGs also shows strong differences, which suggests that degree regularity on its own also does not ensure the best performance.
To further explore the role of degree heterogeneity, it proves instructive to investigate the dependence of the probability to accurately sense the environment on node degree. We have evaluated this relationship for SF networks, and results are plotted in
Figure 3. As one would expect, we see that hub nodes tend to have better awareness of the environment than low-degree nodes. However, after an initial steep increase, increases tend to quickly saturate with degree from
on. We thus see a reason for the poorer performance of the SF networks compared to RRGs: connectivity spent on hub nodes only yields a small improvement in sensing, which comes at the cost of a relatively larger deterioration of the availability of correct information at low-degree nodes.
The observation of the degree dependence of sensing in
Figure 3 motivates a more detailed investigation of sensing enhancement on network connectivity.
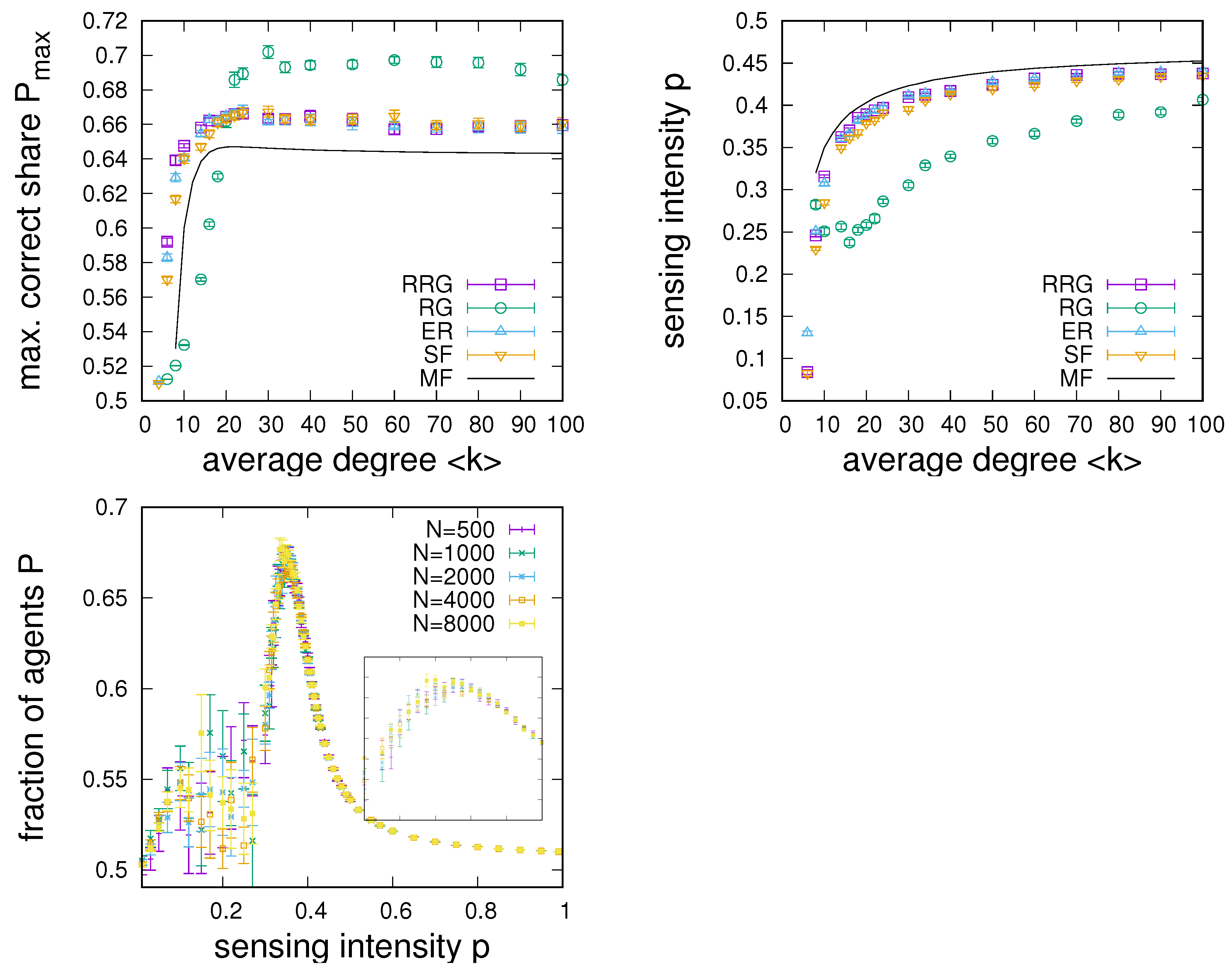
Figure 4 compares the dependence of optimal sensing on the connectivity of networks and mean-field estimates based on Equation (
10), both in terms of the optimal sensing enhancement in
Figure 4 (left) and for the sensing intensity
p required at the optimal point in the panel of
Figure 4 (right). These results lead to a number of observations. First, close inspection shows that larger connectivity does not always lead to improved sensing. In contrast, there exists a connectivity at which sensing is maximally enhanced at around
for RRGs, ERs, and SF networks and at roughly
for RGs. The existence of such a connectivity maximum is also reproduced in the mean-field estimate, which fits reasonably well with results for RRGs, ERs, and SF networks, for which differences become very small for large connectivities. Nevertheless, for low connectivity
, we note that generally RRGs perform better than ERs, which are in turn superior to SF networks and RGs, which perform significantly poorer in terms of sensing enhancement. Differences between these networks tend to become larger as the connectivity of the graph decreases. For
, the order of performance is maintained for RRGs, ERs, and SF networks, but it is apparent that, for large connectivities, RGs have a clear advantage. This advantage manifests itself in terms of a clearly superior performance, but also in terms of much reduced sensing intensities required at the optimal point—see
Figure 4 (left). For the setting investigated in
Figure 4, we also note that sensing enhancement is only possible for
; otherwise, no sensing enhancement is found.
In particular, noticing the connectivity dependence of the performance of ring graphs, one might be inclined to speculate that improvements in sensing for larger connectivity could result from the corresponding reduction in the average shortest path length. In this case, if sensing enhancement was strongly influenced by the average shortest path length, one would also expect drastic changes when the system size of ring graphs is varied. However, analysis of the
dependence for RGs of varying sizes in
Figure 4 (bottom) shows no significant dependence on system size over a range of system sizes in which the average shortest path lengths of ring graphs vary by a factor of at least 10. This analysis is further backed up by a more detailed analysis of the dependence of optimal enhancement on the system size in
Appendix A.1. There, we clearly see that the point and amount of optimal enhancement become largely independent of system size for
, showing that average shortest path lengths are not a strong determinant of a network’s sensing enhancement. Results for the other network types show a similar independence of system size for a large
N (see
Appendix A.1 for details).
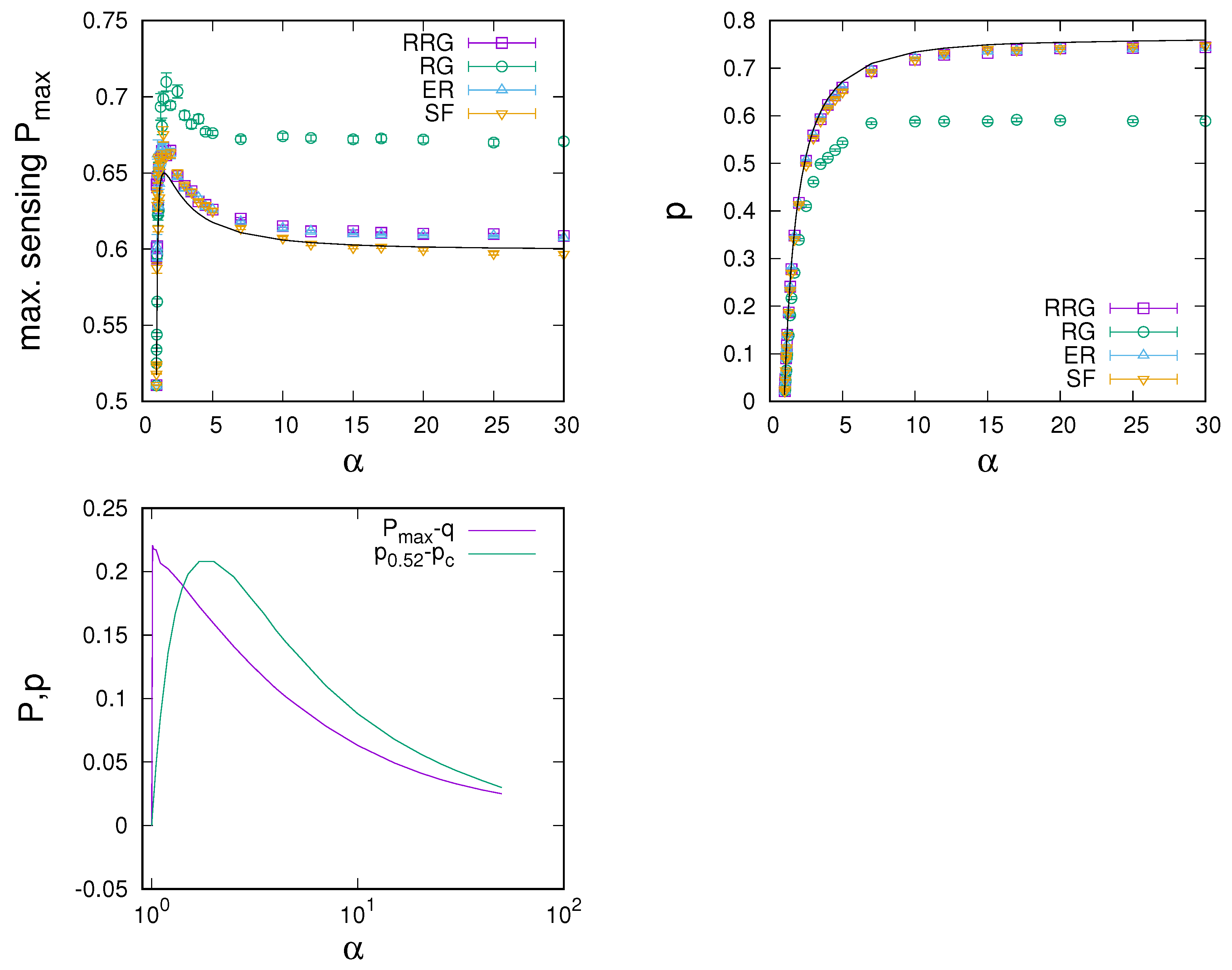
As a last parameter dependency of interest,
Figure 5 shows numerical results for the effect of the selection strength
for networks with
(where
has been chosen, as, for this connectivity, the sensing enhancement for all network types has been roughly saturated with degree). As for the dependence on connectivity—see
Figure 5 (left)—we again note the existence of an optimal
at which the largest sensing enhancement is possible. For RRGs, ERs, and SF networks, optimal
is found at around
, which roughly coincides with the mean-field prediction; for RGs, the optimal
is located at a slightly larger
. From the
dependencies, we also see that the order of network performance is consistently maintained, i.e., for
, RGs allow for more enhancement than RRGs, ERs, and SF networks, differences between which become small. As a last observation from
Figure 5 (left), we also see that sensing enhancement is only possible for
, i.e., only in the presence of complex contagion and not in linear voter-like dynamics with
[
35].
Figure 5 (right) continues the analysis by showing the dependence of the required sensing intensity at the optimal point on
. We again note that differences between RRGs, ERs, and SF networks are rather small and close to the mean-field expectation. In contrast, and in particular for larger
, sensing intensities required at RGs are noticeably smaller.
Further, results from an analysis of the finite-connectivity mean-field orbit diagram are presented in the bottom panel of
Figure 5. In more detail, we plot the sensing enhancement at the bifurcation point as a function of
. One notes that the closer
is to
from above, the larger the possible sensing enhancement, which would suggest an optimum at the smallest possible
approaching
. However, the smaller the
, the slower the response dynamics after a switch in the environmental signal. Hence, as argued earlier, points of optimal sensing will generally be found at slightly larger values than the sensing intensity at the bifurcation point. Values will be larger with a shorter time scale of environmental change.
Figure 5 (bottom) also shows that the size of the parameter region of sensing intensities for which meaningful sensing enhancement is possible quickly converges to zero as
approaches one. This in effect limits the possible sensing enhancement for small
and explains the existence of an optimal value of
distinctly larger than
—again an effect related to speed–accuracy trade-offs [
31].
4.2. Small-World Effects
Results in
Section 4.1 have shown that maximum sensing enhancement can be achieved on either random regular graphs for low connectivity or ring graphs for large connectivity. Both types of networks can be seen as limiting cases of regular small-world networks, which we investigate in more detail in this subsection. For this purpose, regular small worlds with varying shortcut density
f have been constructed.
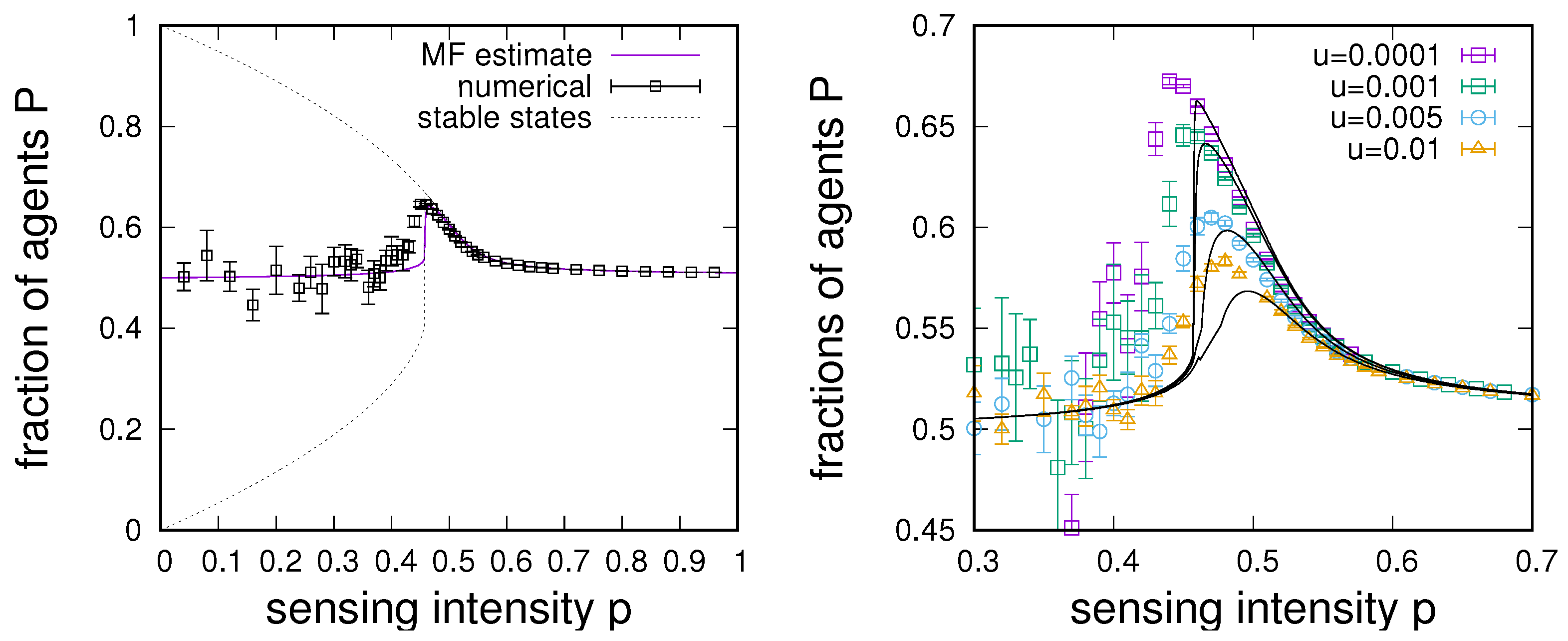
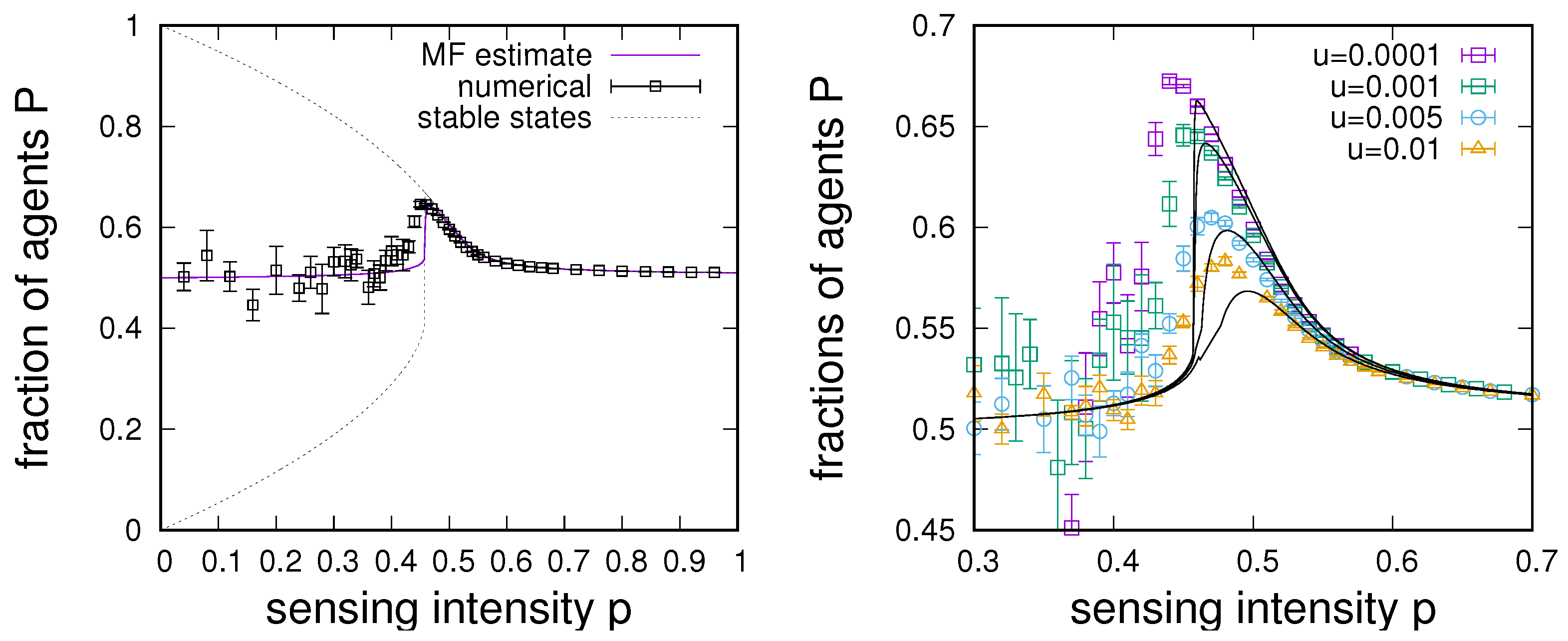
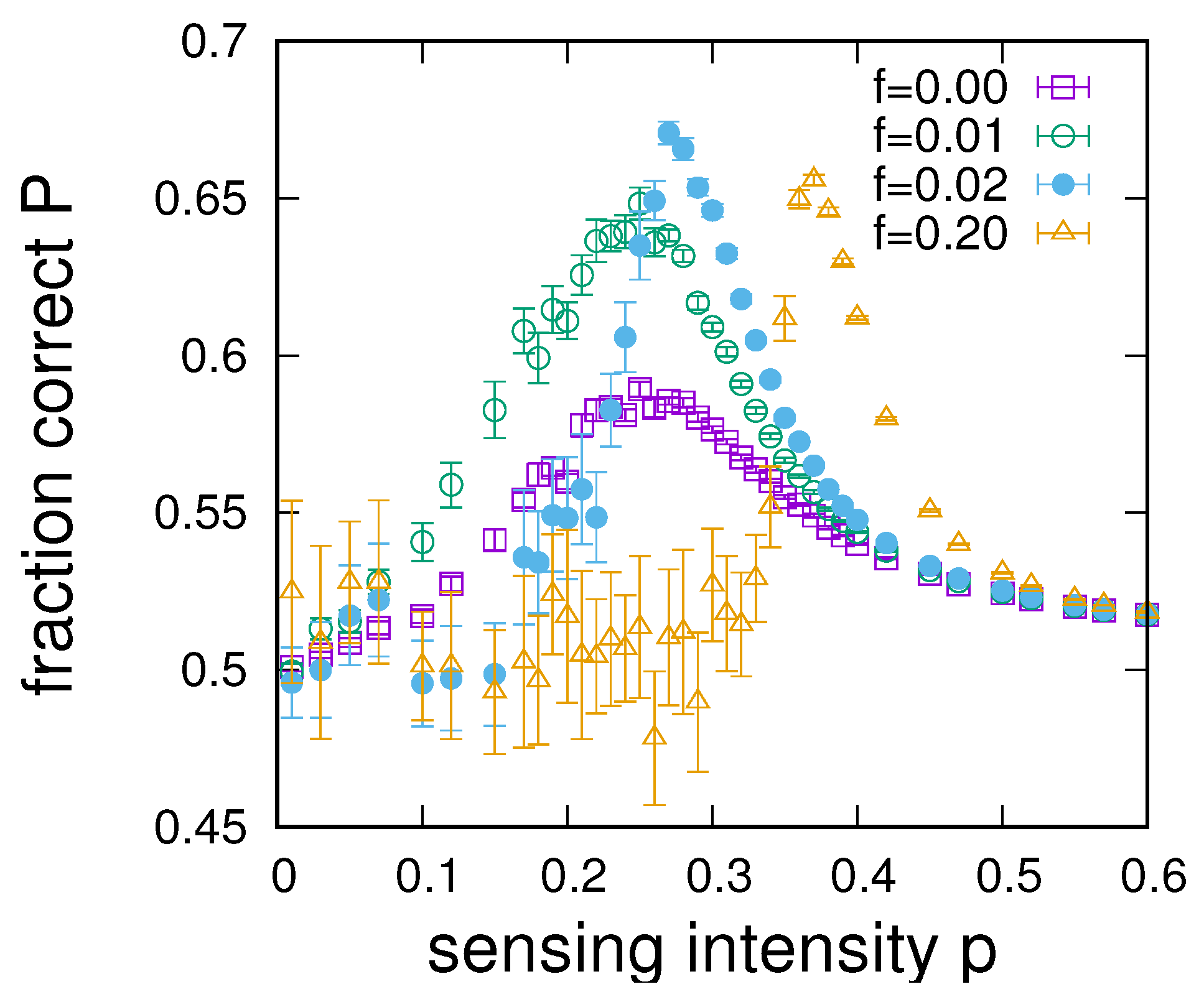
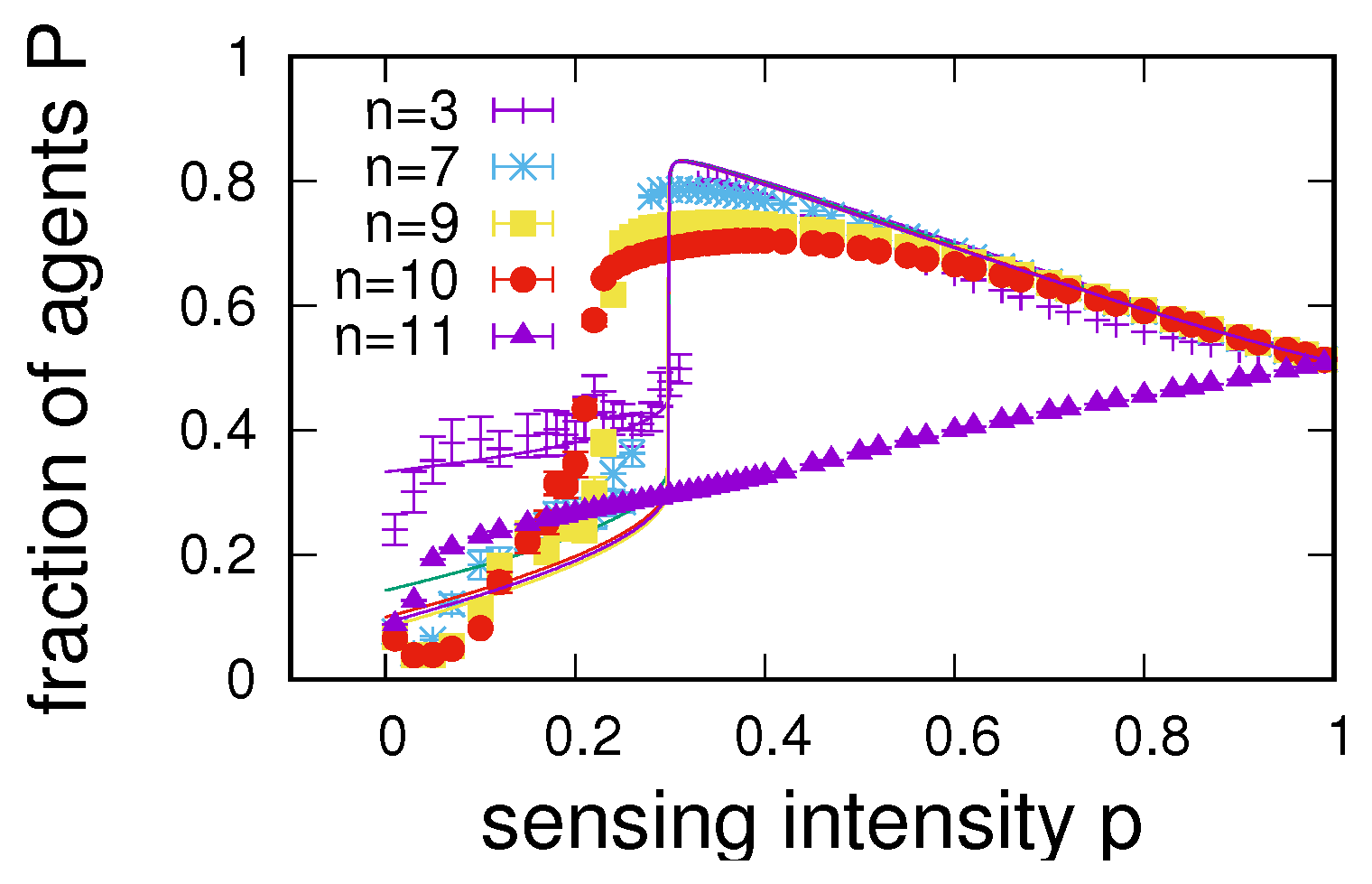
Figure 6 illustrates typical results for the dependence of the fraction of the populations that senses correctly
P on the sensing intensity
p for different settings of the small-world parameter
f. These numerical results highlight that optimal sensing is not achieved in either of the limiting cases of
(an RG) or
(an RRG), but instead at some intermediate value of
f. The settings for
f chosen in
Figure 6 indicate the existence of an optimal small world for sensing enhancement.
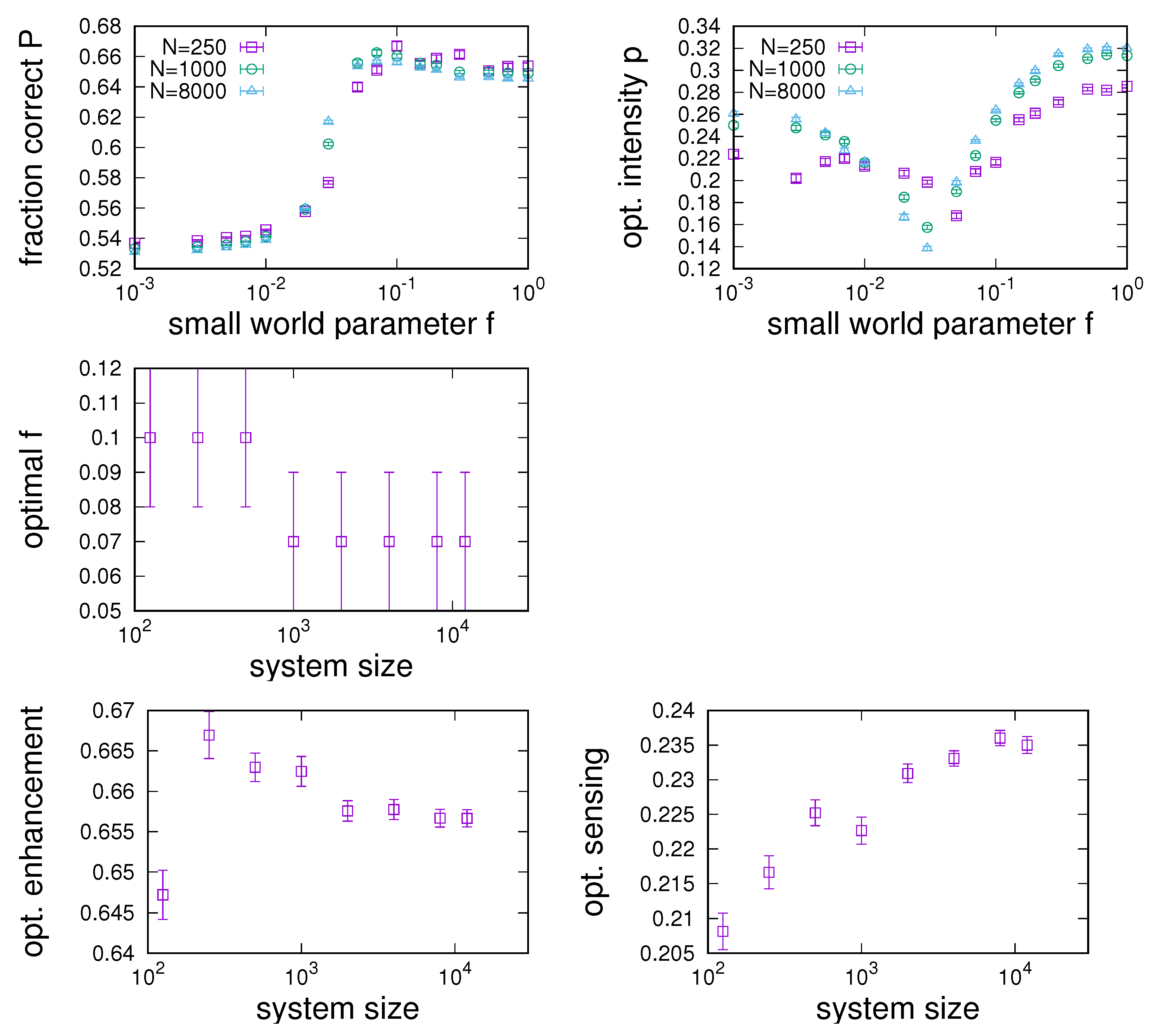
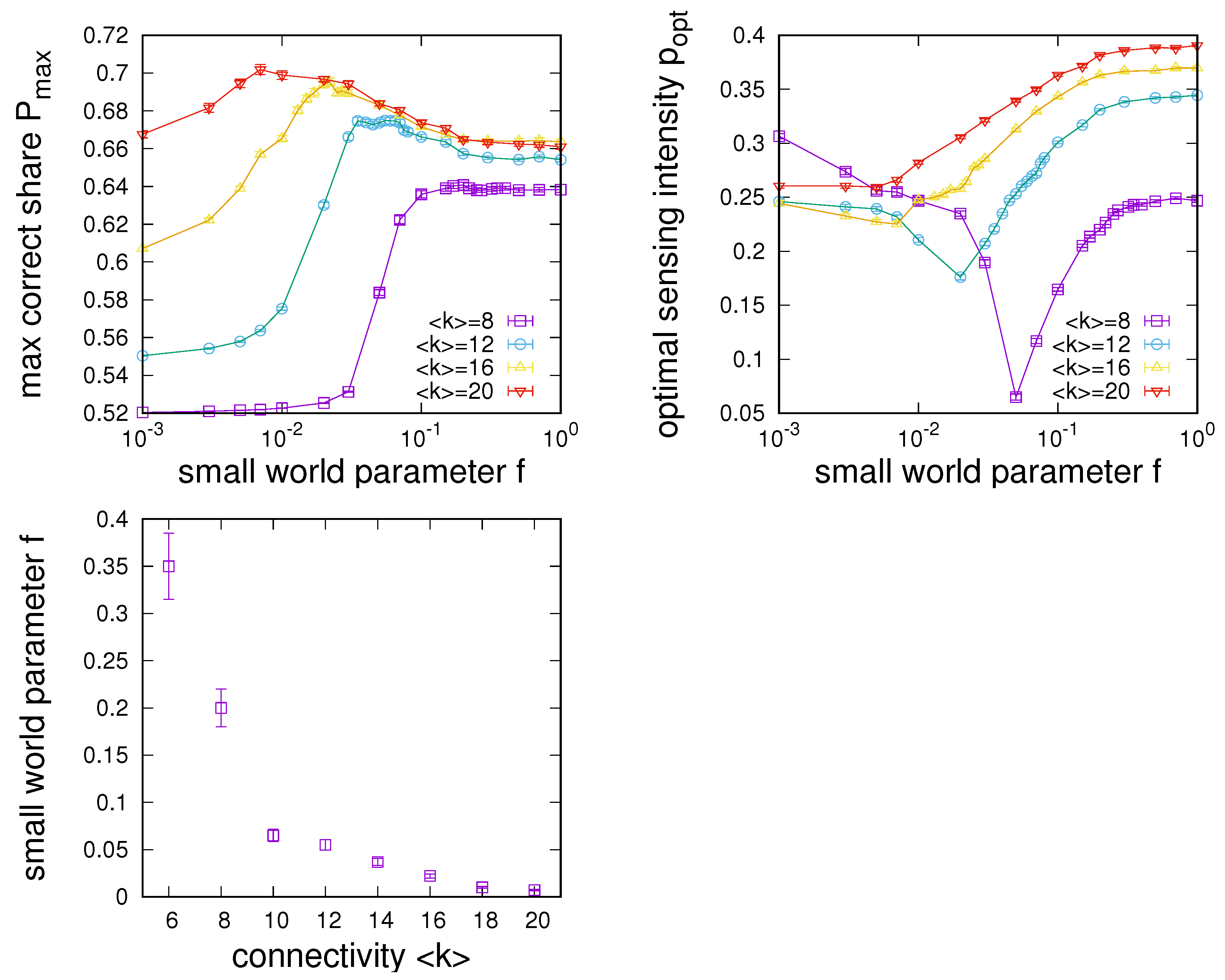
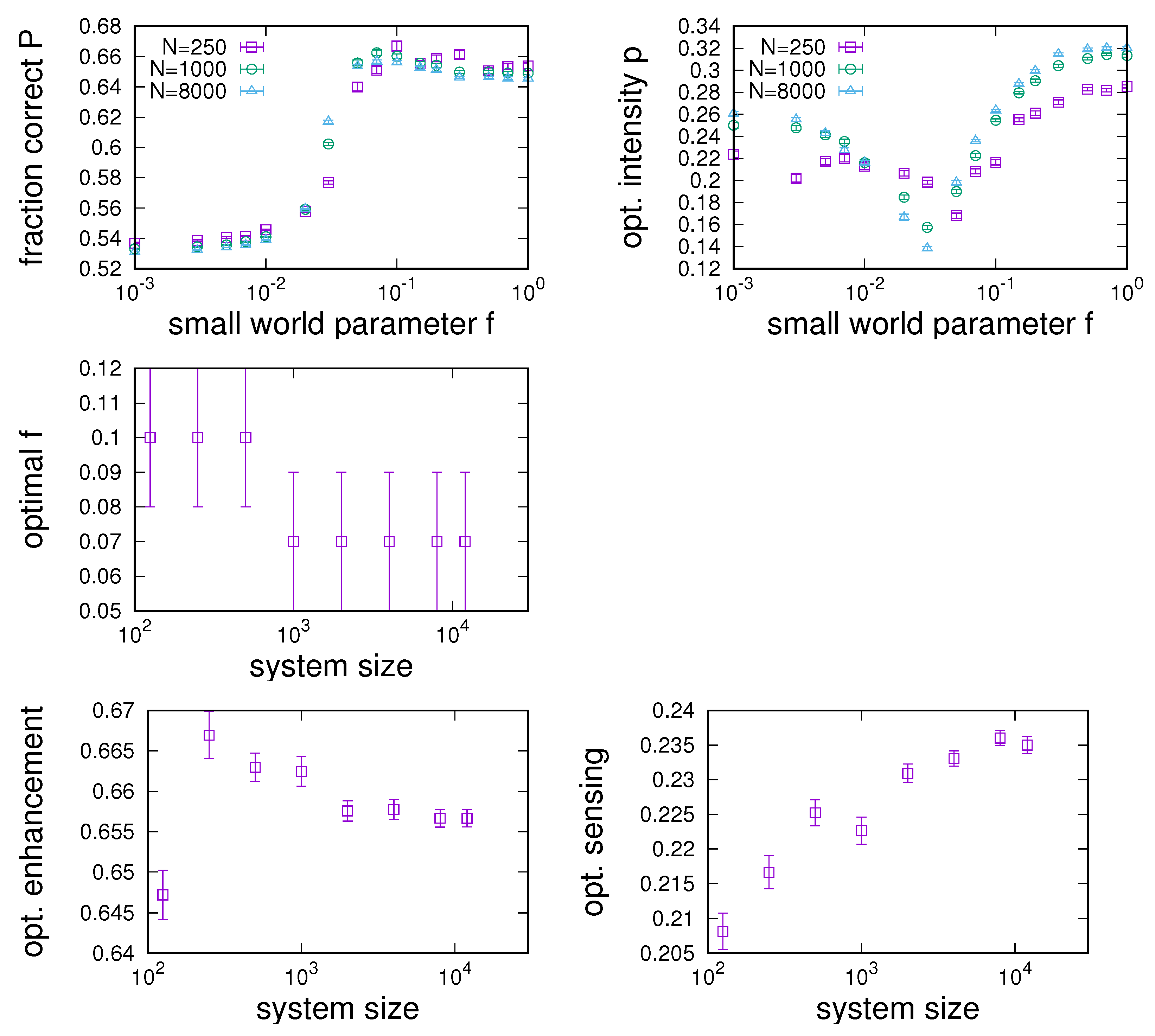
This idea is further explored in the experiments showcased in the panels of
Figure 7. Here, we constructed small-world networks for different settings of the small-world parameter
f and then determined the optimal sensing intensity
and the maximum fraction of correctly sensing agents
for each network. We plot the dependence of
(left-hand panel) and
(right-hand panel) on
f, again for different choices of the network connectivity
to ensure robustness of our findings. We make several observations from these results.
First, as expected, small worlds are found to interpolate between the settings of an
and an
. As RGs provide hardly any sensing enhancement for low connectivity in the regime where RRGs performed best (as observed in
Section 4.1), we see a corresponding transition between both networks for low connectivity. As, e.g., seen for
or
, we find that a relatively small density of shortcuts is typically sufficient to transform an RG to achieve RRG-like performance. In this transition region towards RRG-like performance, a minimum of required sensing intensities is assumed (see
Figure 7, top right).
Second, the interpolation between the RG and the RRG regimes is not just achieved through a monotonic increase or decrease. Instead, we see a clear maximum in sensing enhancement for small
f, indicating that there is a low shortcut density in the small-world region is optimal for sensing enhancement. The latter point is further supported by the bottom left panel of
Figure 7, which shows the dependence of the small-world parameter that maximises sensing enhancement on the average degree. The results show that this typically happens for small densities of shortcuts
f, which decrease as the network’s connectivity increases.
We have also carried out experiments to investigate the influence of system size on the location of the optimal small-world region. To not disrupt the flow of the narrative, more detailed results are presented in
Appendix A.2. Results presented in
Figure A2 indicate that the optimal small-world parameter
f is roughly independent of system size for sufficiently large small worlds of size
.
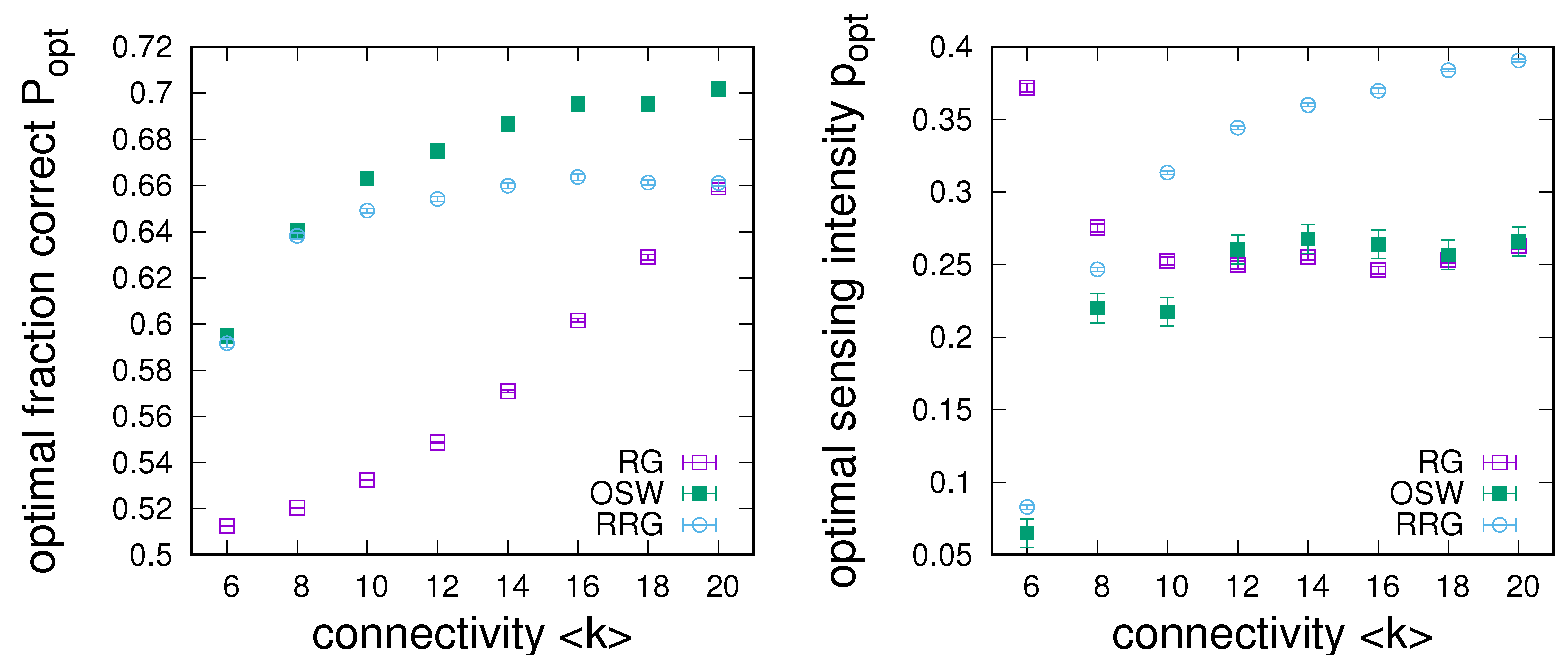
As a last point in this subsection,
Figure 8 compares the achievable sensing enhancement on optimal small worlds to ring graphs and regular random graphs. On the one hand, in the left-hand panel of
Figure 8, we see that optimal small worlds (OSWs) only have a small advantage over the limiting cases of RRGs and RGs for small connectivity, but can lead to substantial improvements for larger connectivity. On the other hand, the right-hand panel of
Figure 8 underlines that this improved performance can generally be achieved by a sensing intensity, which is at worst only marginally larger than the minimum required for either RRGs or RGs.
4.3. Effects of Non-Binary Environments
In the above, we have investigated the role of networks for sensing enhancement in binary settings. Here, we generalize from the scenario of two possible states of the environment to the general case of an arbitrary number of states .
First results are presented in
Figure 9, in which we compare simulation results obtained for different
n to mean-field estimates based on Equation (
5). In principle, numerical results are found to be similar in behaviour to our observations in
Figure 1a, again typically showing a low sensing region in which correct sensing is roughly given by
, separated by a bifurcation of the multi-stable system from an enhancement region in which
. However, we also note a clear dependence of the region of maximum enhancement on the number of environmental states, where increasing
n typically results in a decline in enhancement until no enhancement is possible for an
n larger than a certain maximum number of states
. In
Figure 9 for
on an RRG, we find
, i.e., for this particular value of
q, no enhancement is possible in an environment allowing for more than 10 states. We also observe that, with a growing number of states, the region of maximum enhancement tends to move towards lower sensing intensities (which is abruptly reversed for
, for which the system no longer exhibits a bifurcation). One further notes that, for
, although capturing qualitative behaviours, the mean-field description fails to capture the shift in bifurcation points.
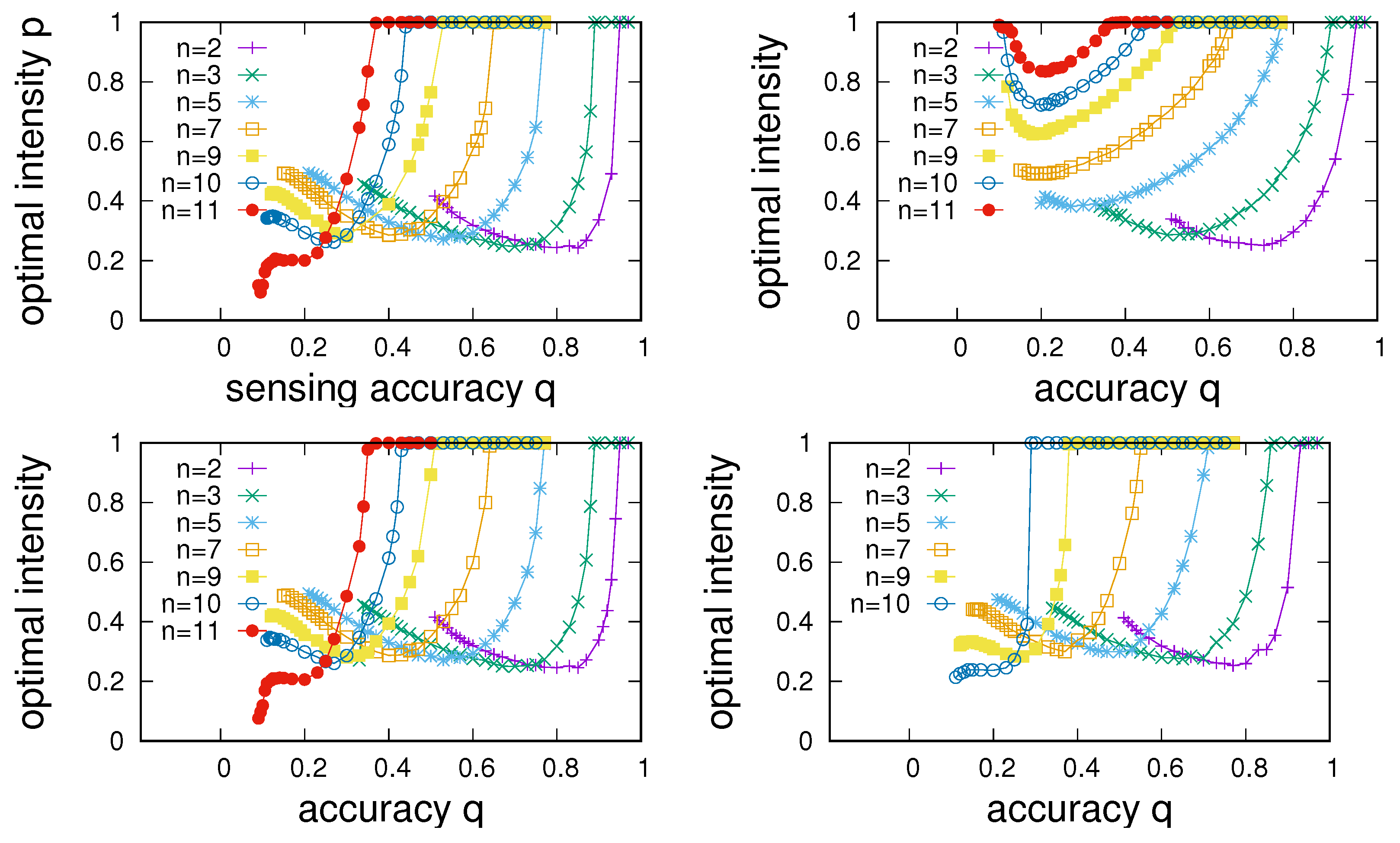
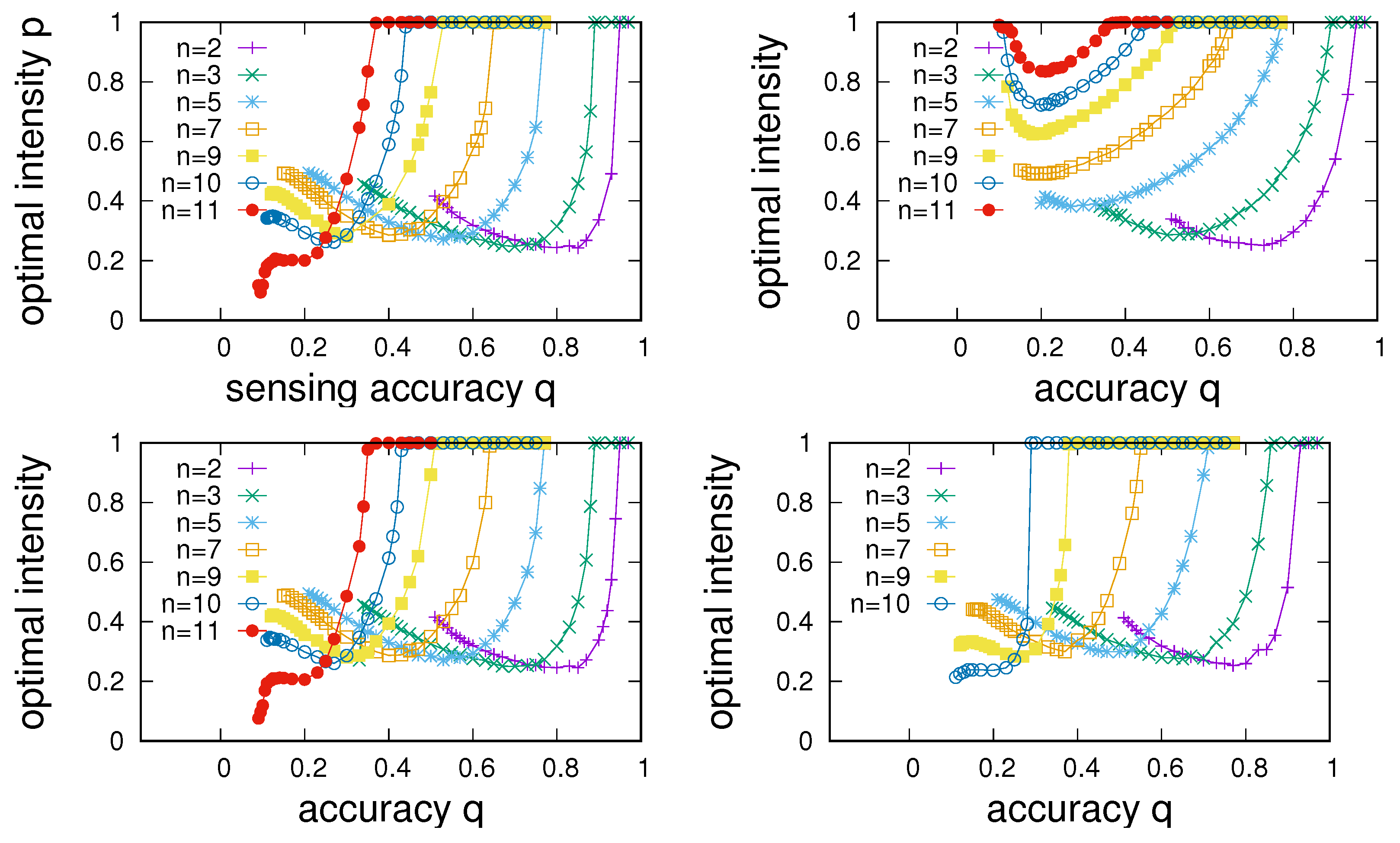
To proceed, we aim to quantify differences in the network structure in multi-state environments. For this purpose, we have run numerical experiments in which we have determined the
dependence and extracted points of maximum sensing enhancement
for each setting of
q for the four different types of networks discussed in
Section 4.1 and different settings of
n. Results of these experiments are summarised in
Figure 10, where the dependence of the points of maximum sensing enhancement on
q is shown for the four different networks. The corresponding information about sensing intensities at which maximum enhancement is achieved is given in
Figure 11. A number of observations are in order.
First, we note that sensing enhancement typically depends on q and tends to reach a maximum as a function of q and then decline to in a region in which sensing enhancement becomes impossible. Determining the largest value of at which allows us to characterize the extent of the region of sensing accuracies for which sensing enhancement can take place.
As a second point, we note that the point of maximum enhancement also is a function of the number of states. Maximum enhancement is observed to first increase with
n, reaches a maximum as a function of
n, and then declines. In agreement to what we noted in
Figure 9, we see that enhancement becomes impossible beyond a certain number of environmental states. The experiments presented in
Figure 10 allow us to determine an overall
for each of the four networks; we find
for ER networks and RRGs and find
for SF networks and RGs.
Third, comparison between the panels in
Figure 10 shows clear differences among network types. Whereas, as one might expect, dependencies for ER and RRGs are very similar, SF networks and RGs show distinctly different behaviour. Two points stand out. First, SF networks are found to always show slightly poorer enhancement compared to ERs and RRGs. Second, whereas maximum enhancement for RRGs, ERs, and SF networks is found for values of
n just below
, the best enhancement for RGs tends to occur for substantially smaller
n.
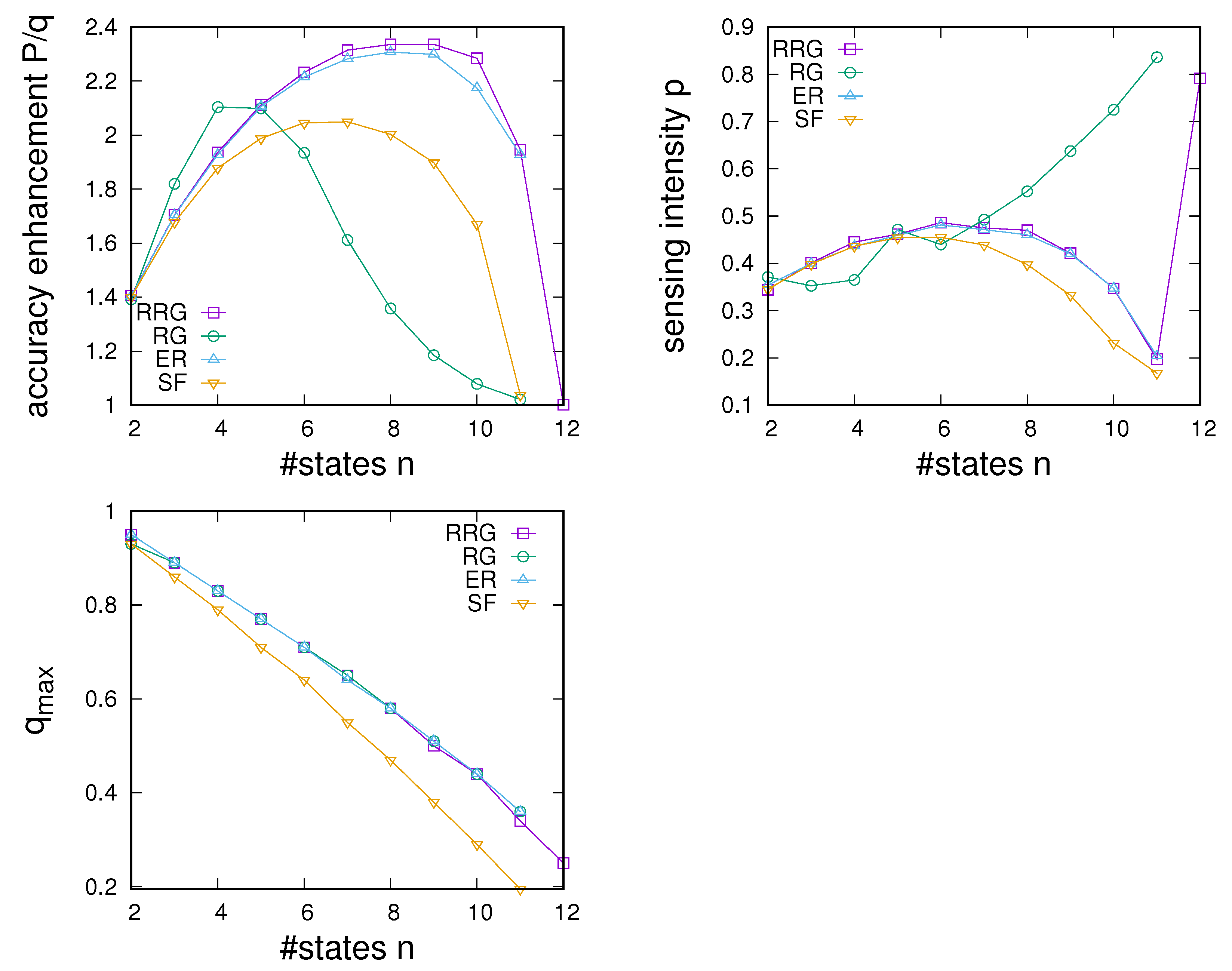
To emphasise the above points, we have characterised each network type by its dependence on (i) the maximum achievable accuracy enhancement as a function of
n, the sensing intensity required to achieve this enhancement as a function of
n, and the maximum extent
of the region of sensing accuracies for which enhancement is possible as a function of
n. Results are given in
Figure 12. We again see different propensities of networks to enhance sensing. Note that RGs tend to allow for better enhancement for a low number of states, whereas RRGs and ER-type networks give better results for larger numbers of states (see
Figure 12 right). This is also reflected in much lower sensing intensities required to achieve optimal results for the latter networks (see
Figure 12 right). SF networks, on the other hand, always exhibit poorer performance and also tend to allow for a smaller range of sensing accuracies
q for which enhancement is possible (see
Figure 12 bottom).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}