
An Entropy-Based Combined Behavior Model for Crowd Evacuation

Abstract
1. Introduction
- We propose an entropy-based combined behavior model ECBM that combines a variety of evacuation behaviors, making crowd evacuation more realistic.
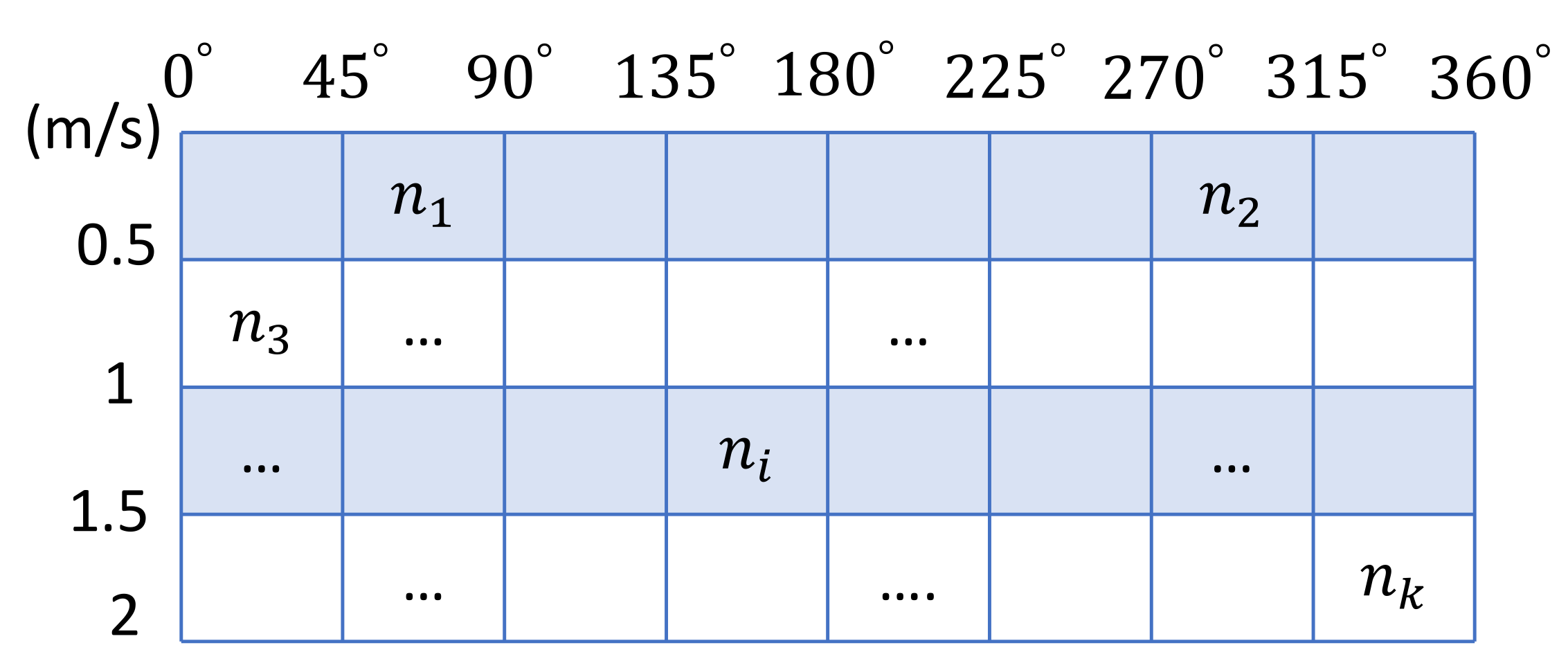
- We integrate the crowd chaos based on the Boltzmann entropy into the ECBM and present a velocity adjustment method to ensure the evacuees follow a more orderly direction.
- We implement the ECBM and conduct extensive experiments using simulations to evaluate the ECBM. The simulation results validate the effectiveness of our evacuation model.
2. Related Work
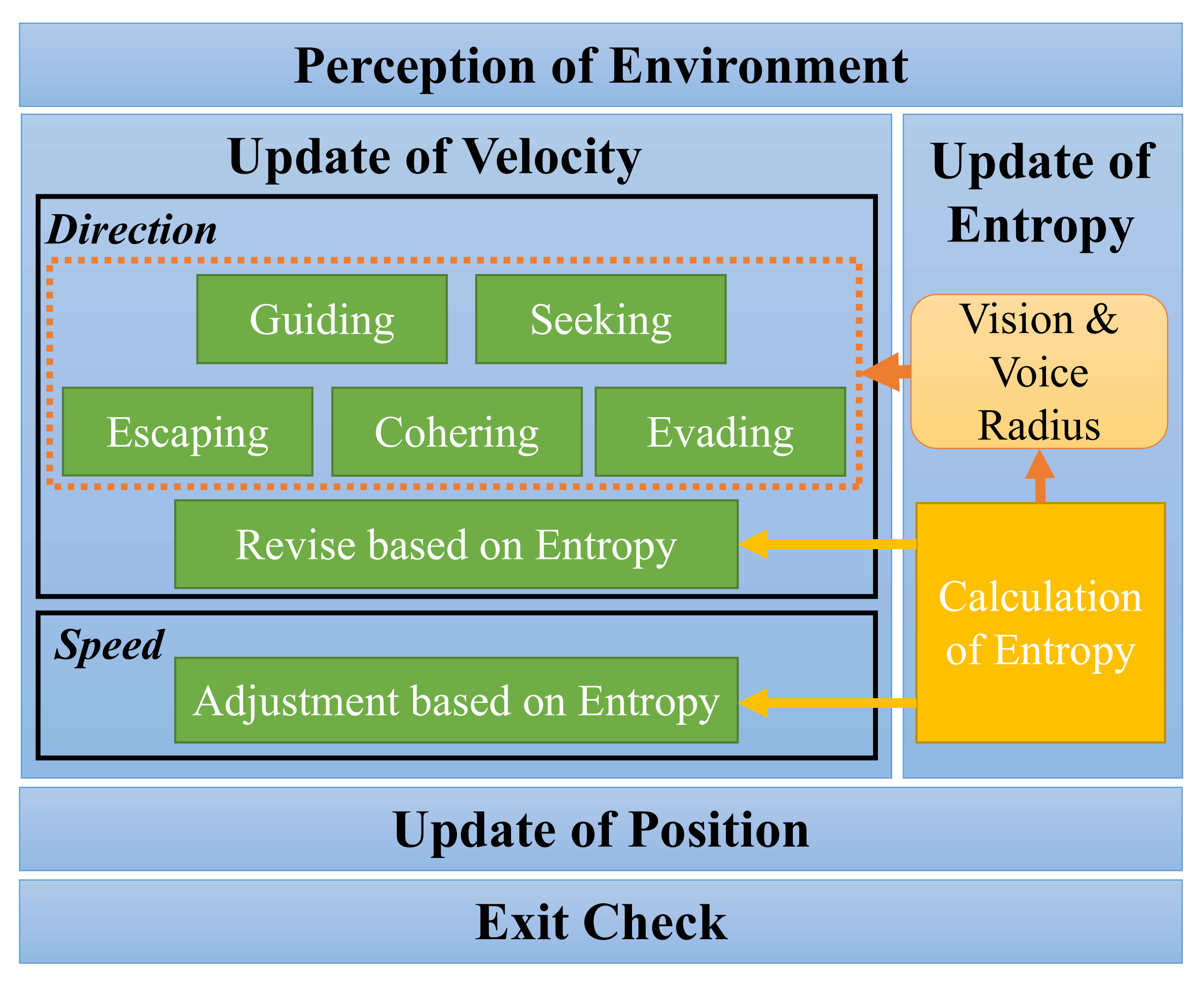
3. ECBM Model
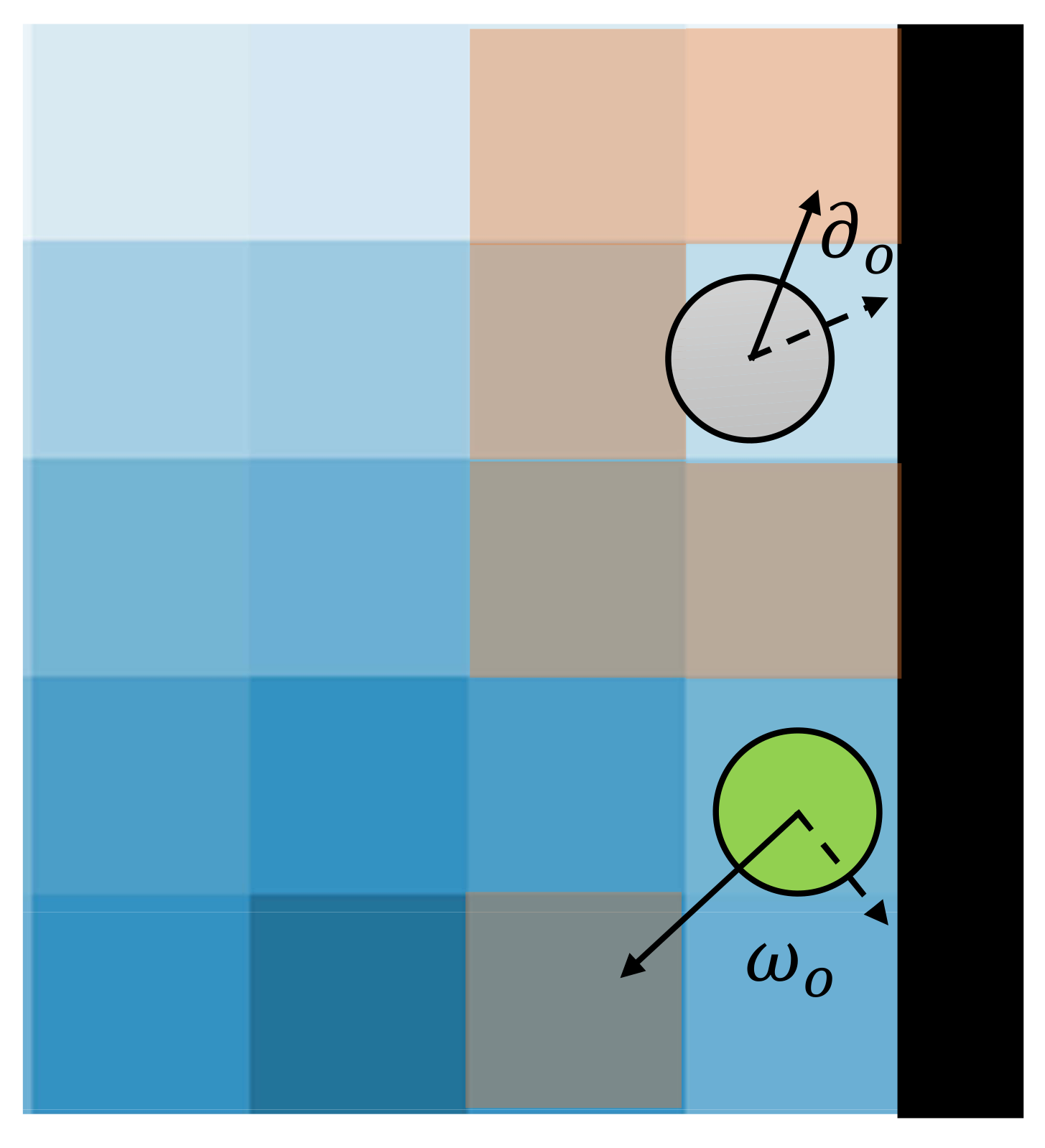
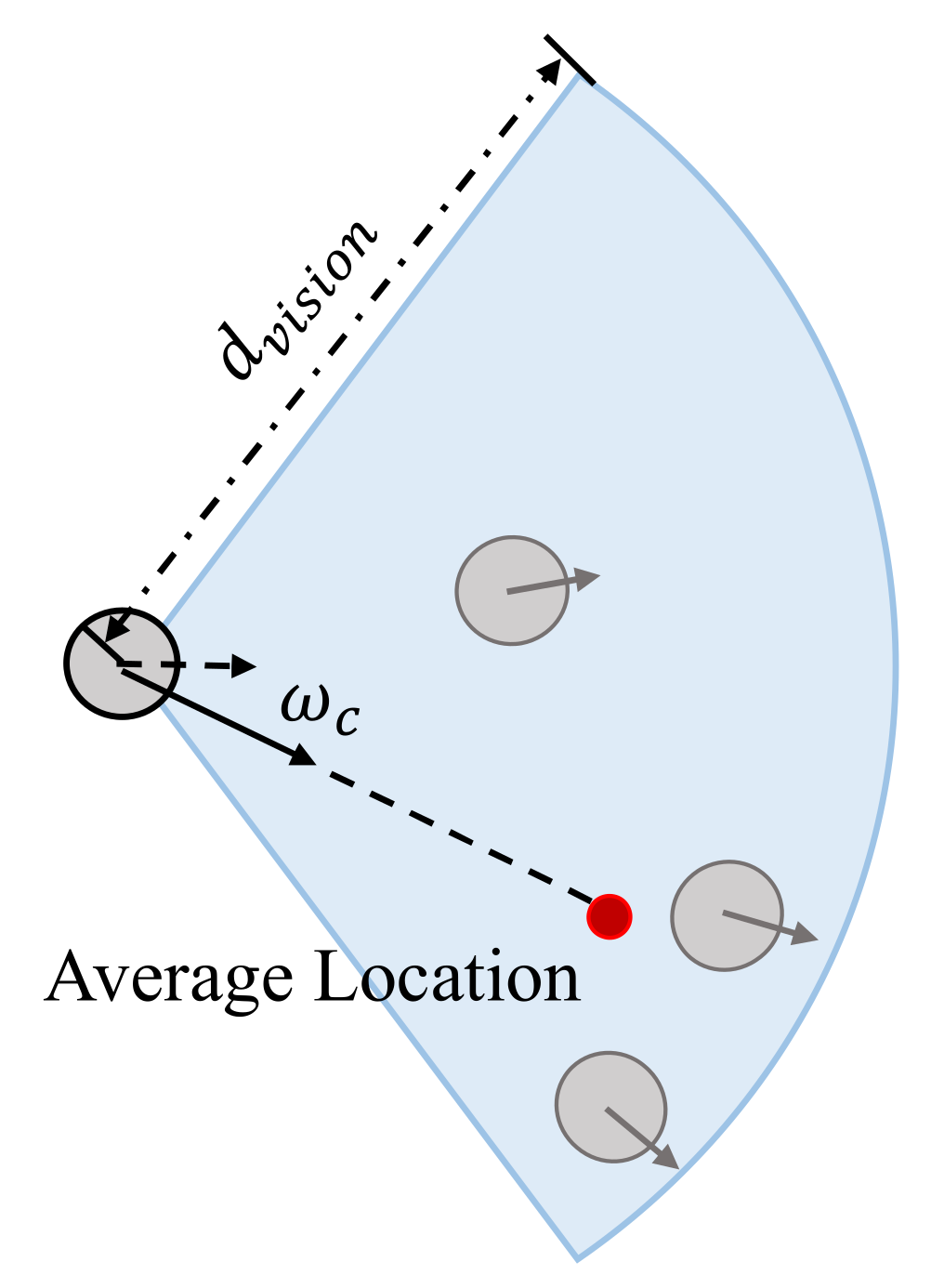
3.1. Behavior Modules
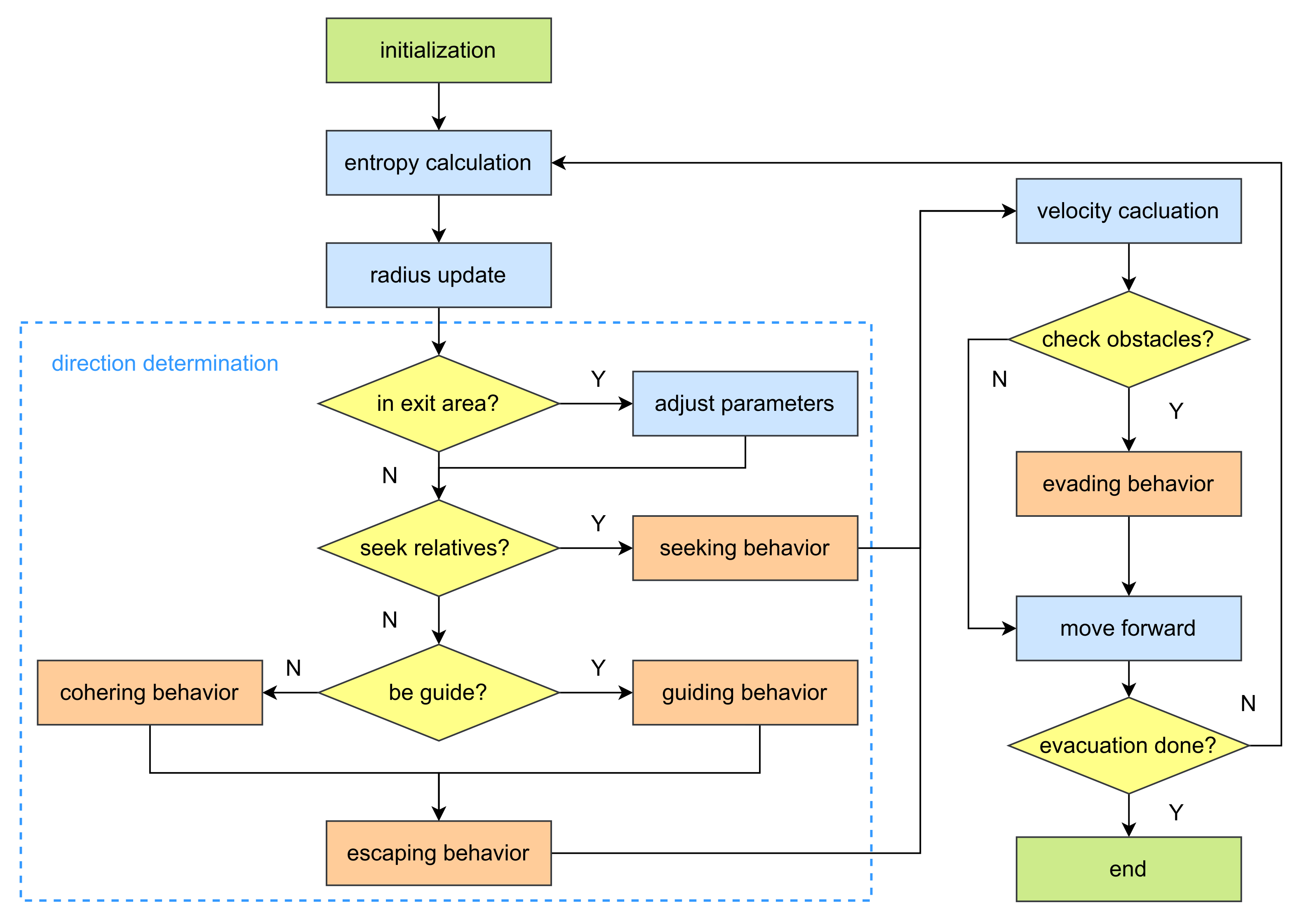
3.2. ECBM Algorithm
4. Simulation and Analysis
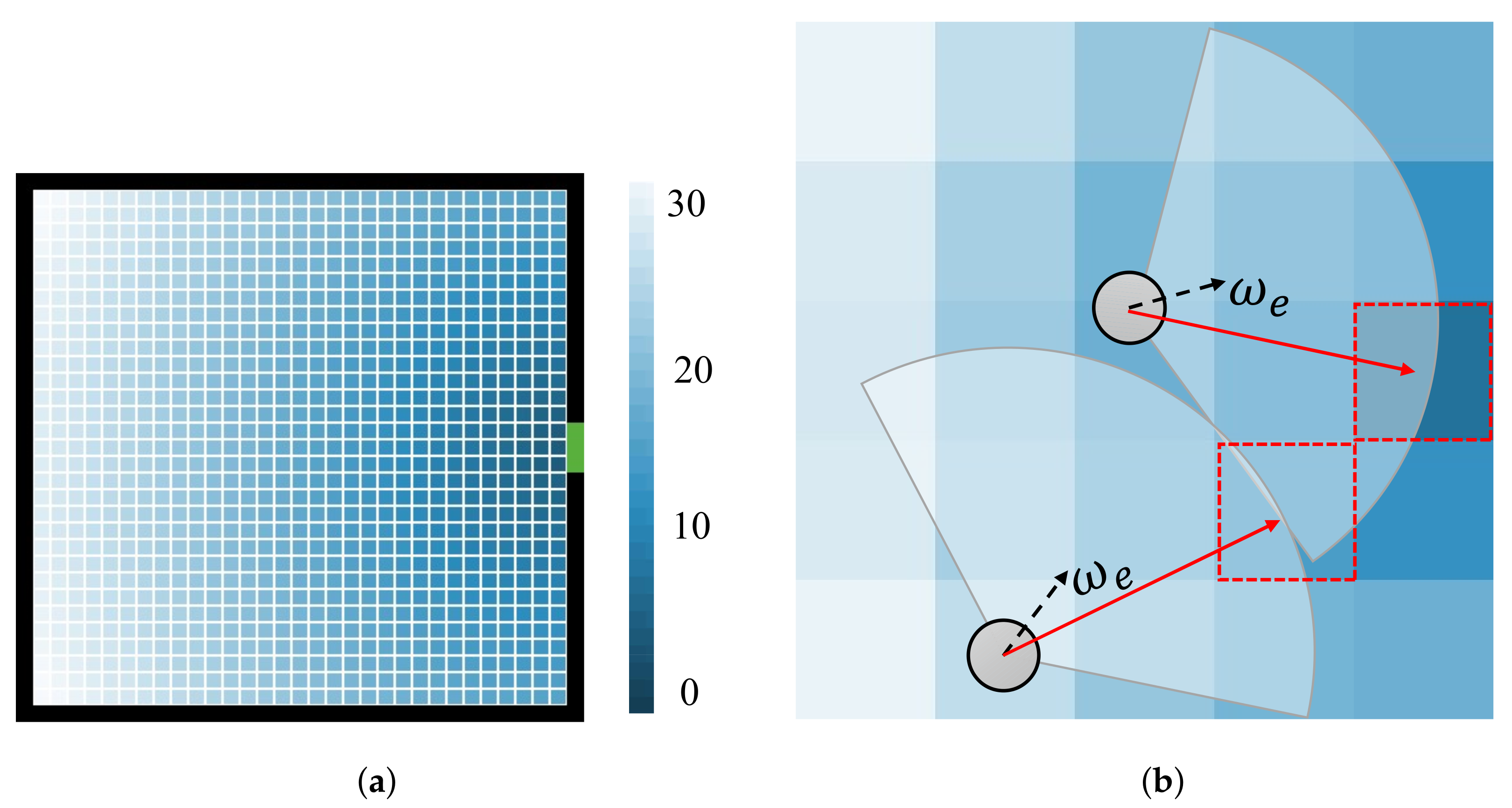
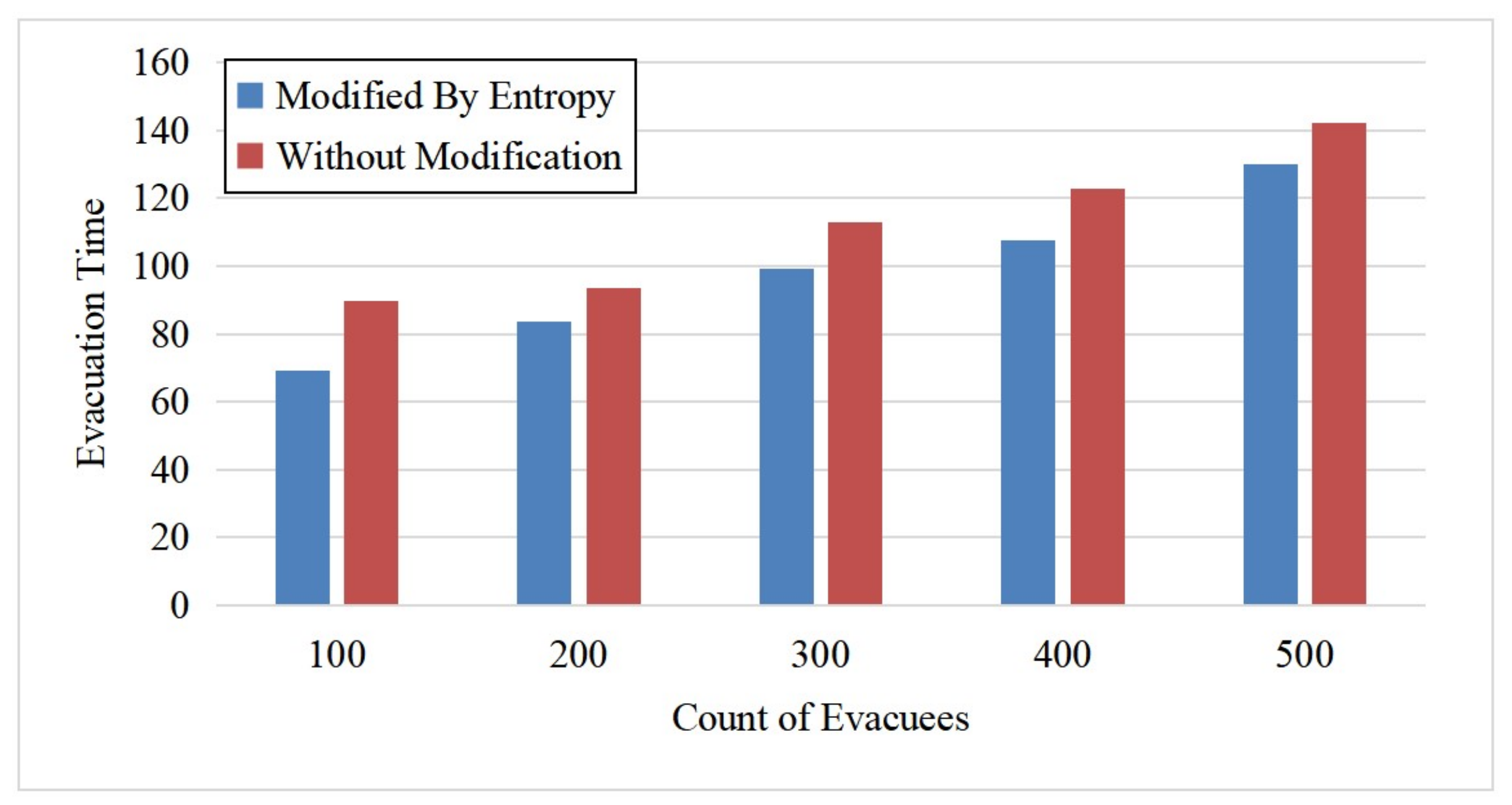
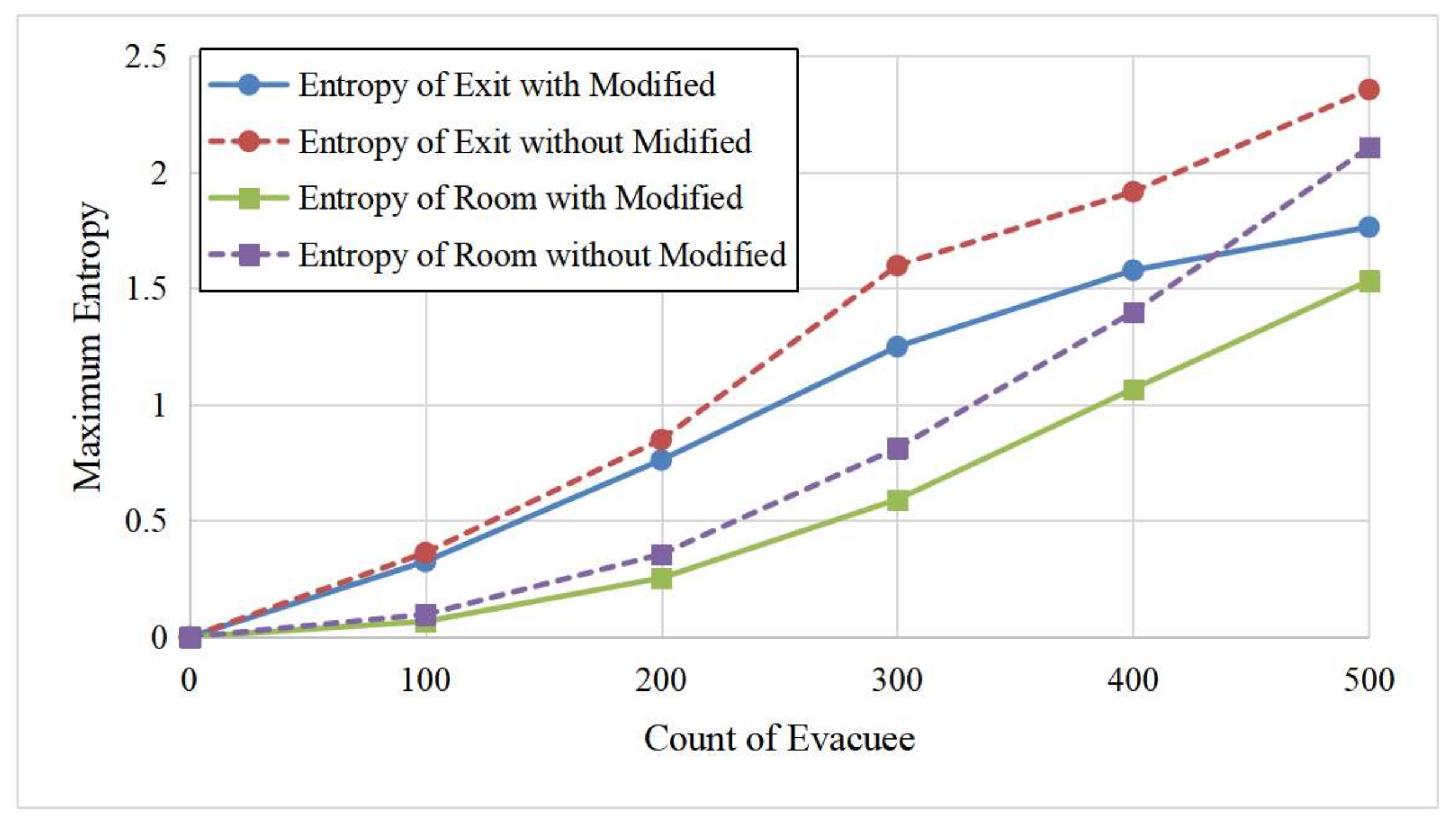
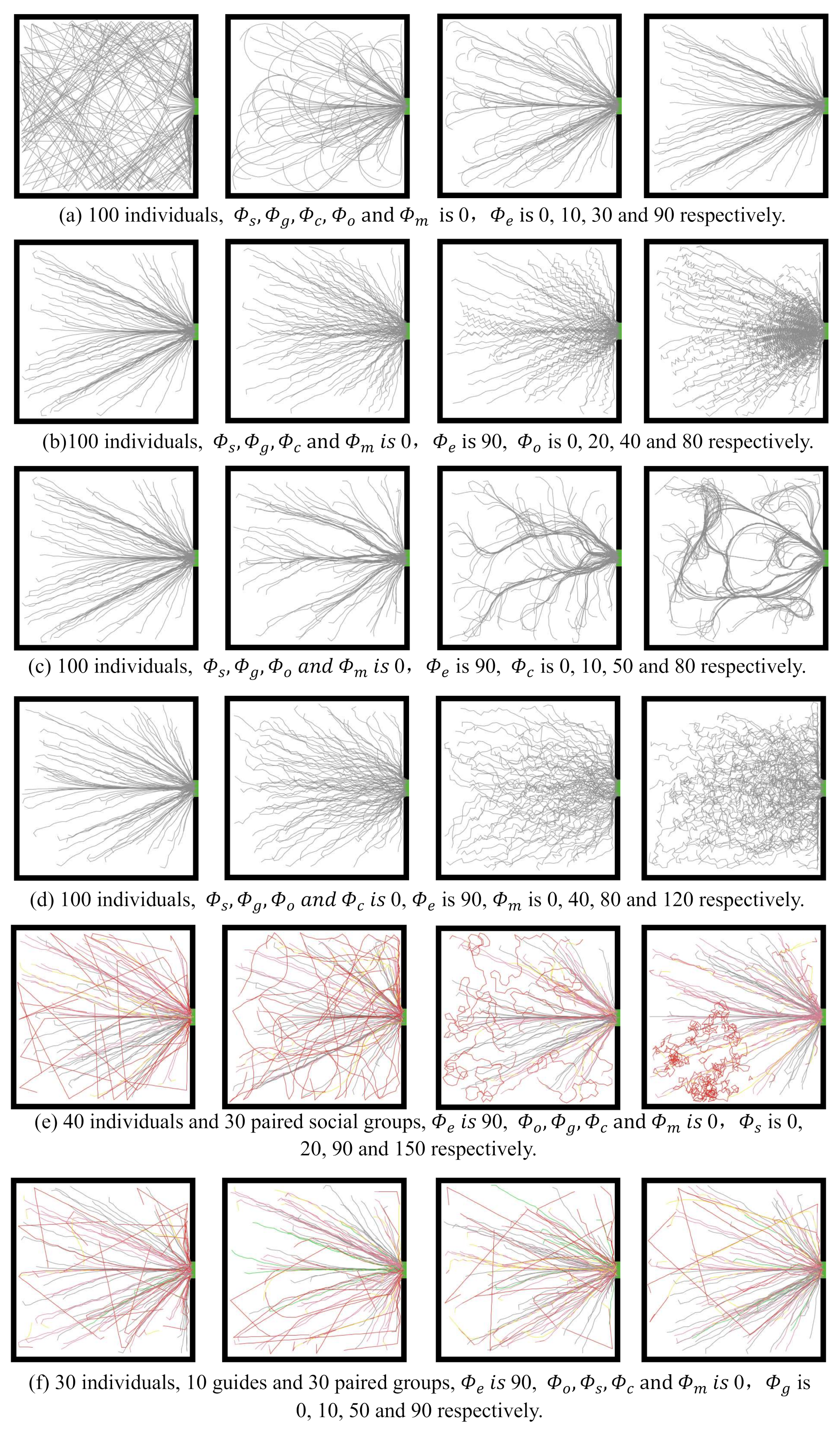
4.1. Effect of Entropy on Evacuation
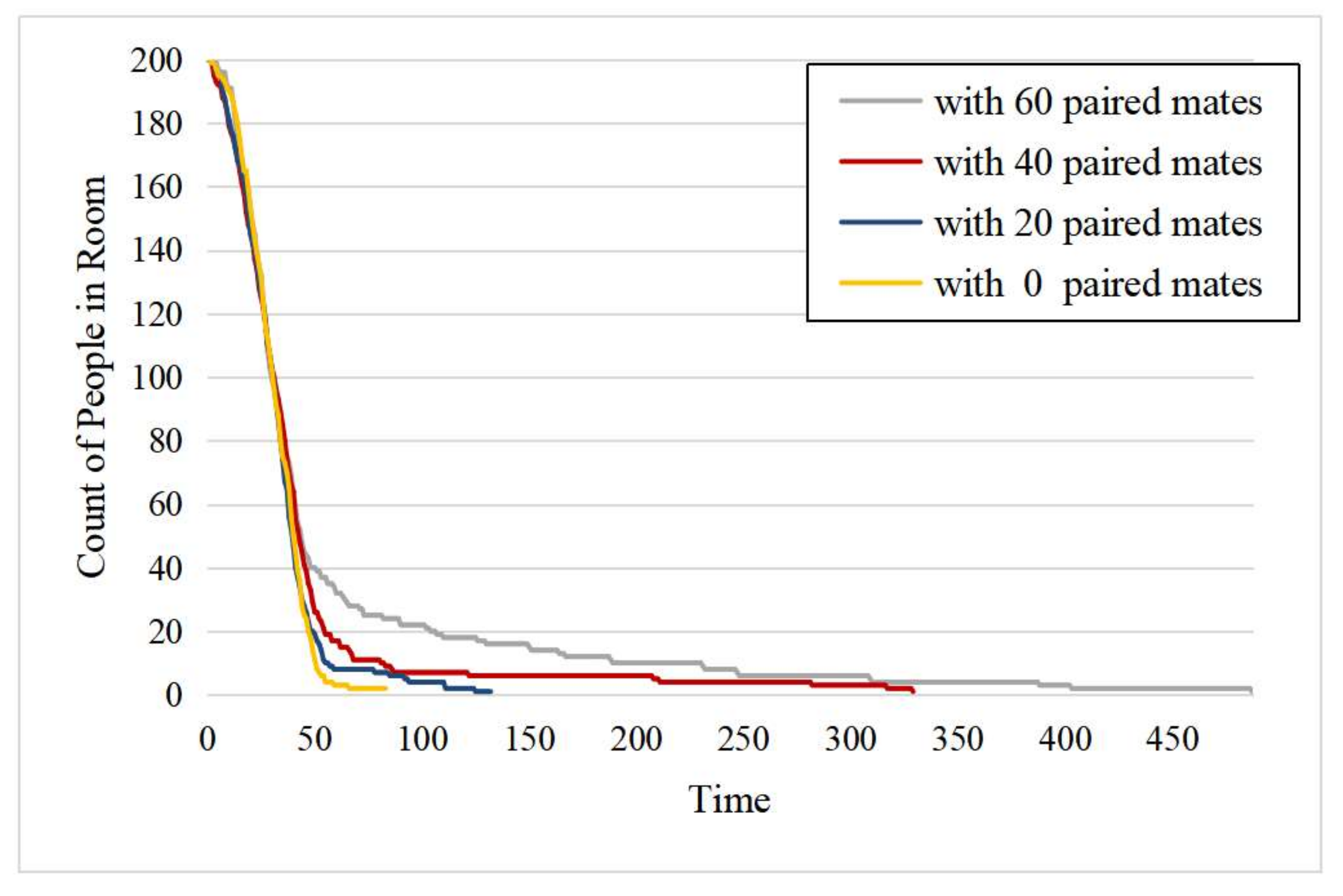
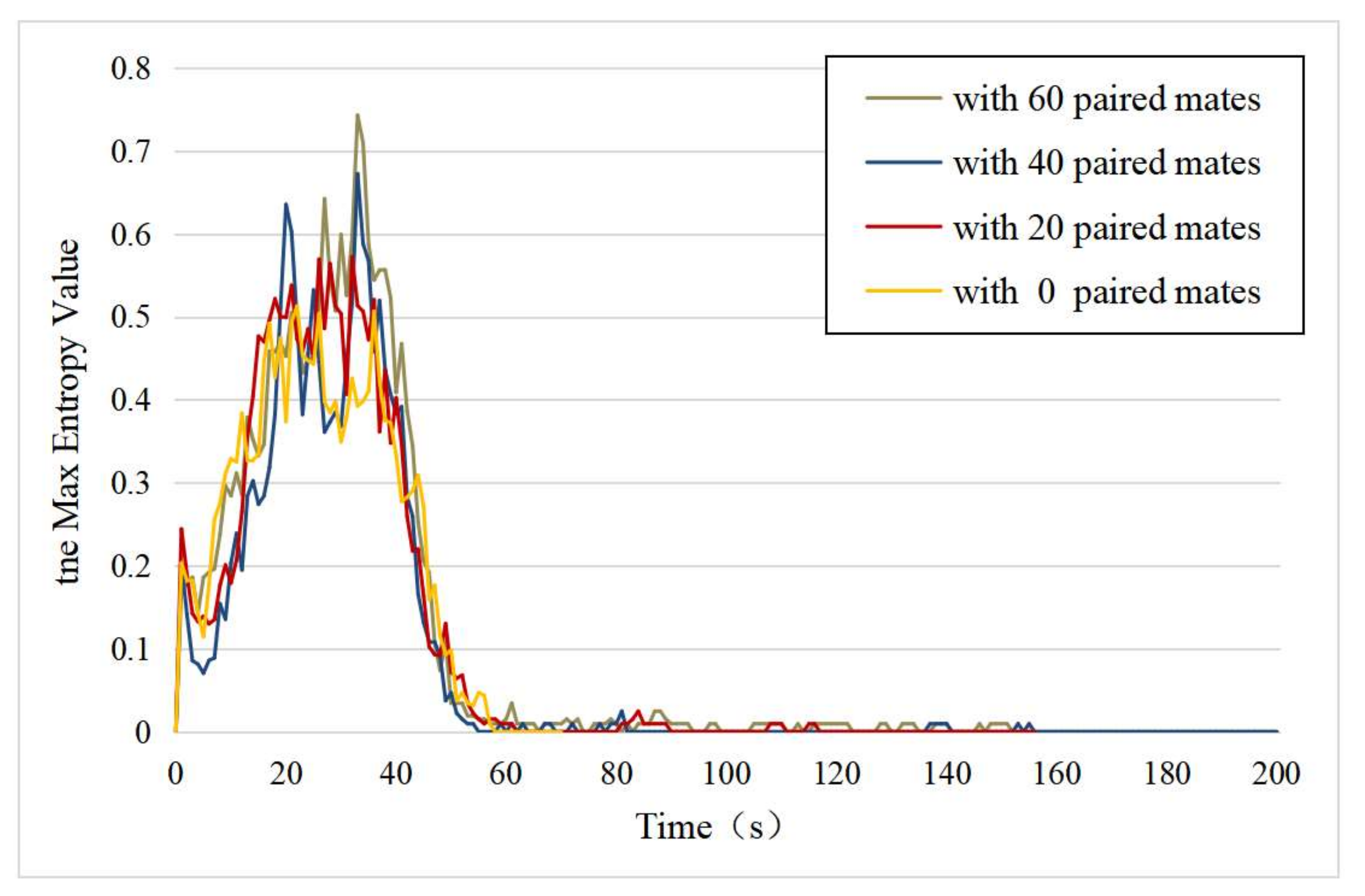
4.2. Effect of Seeking Behavior on Evacuation
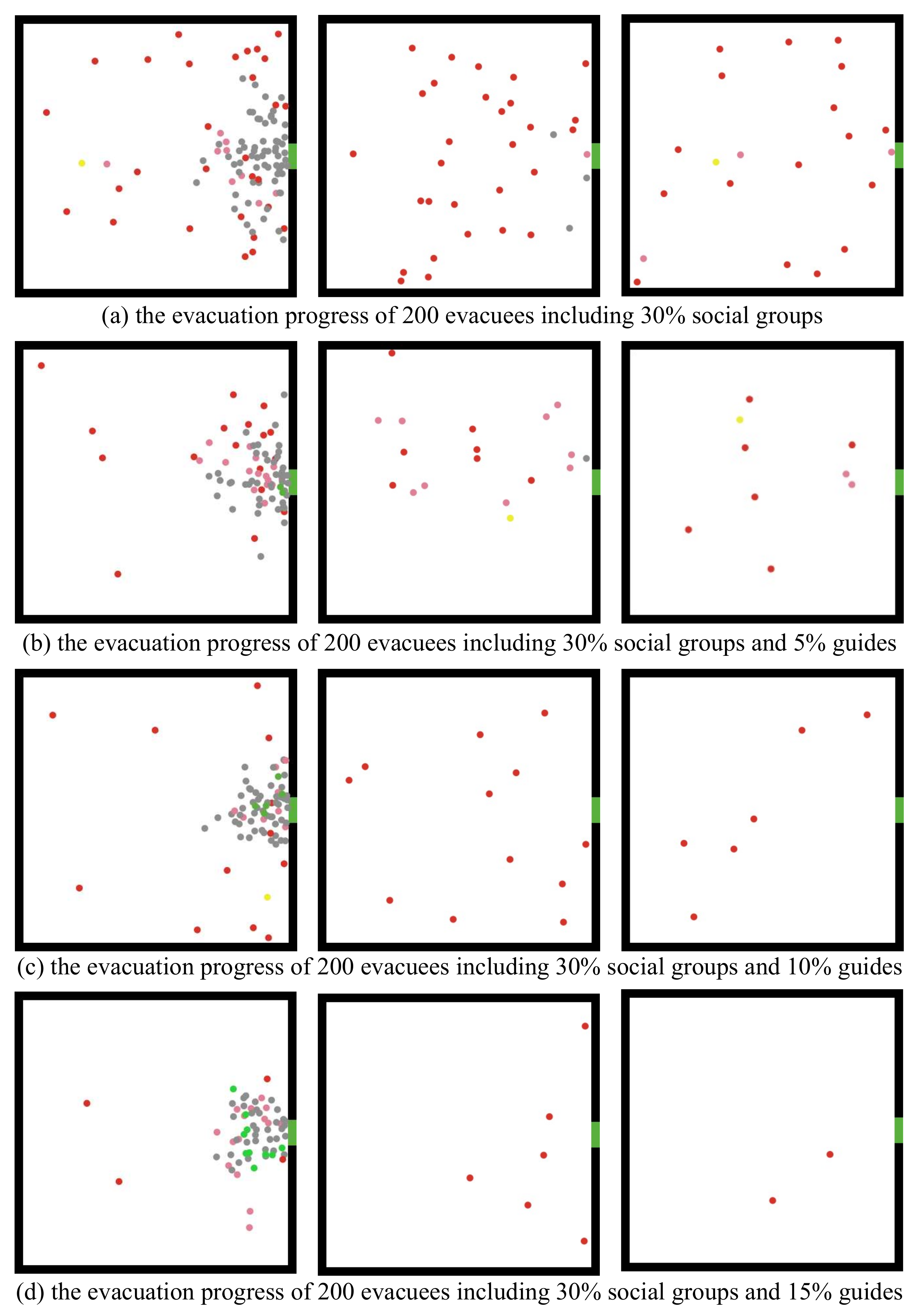
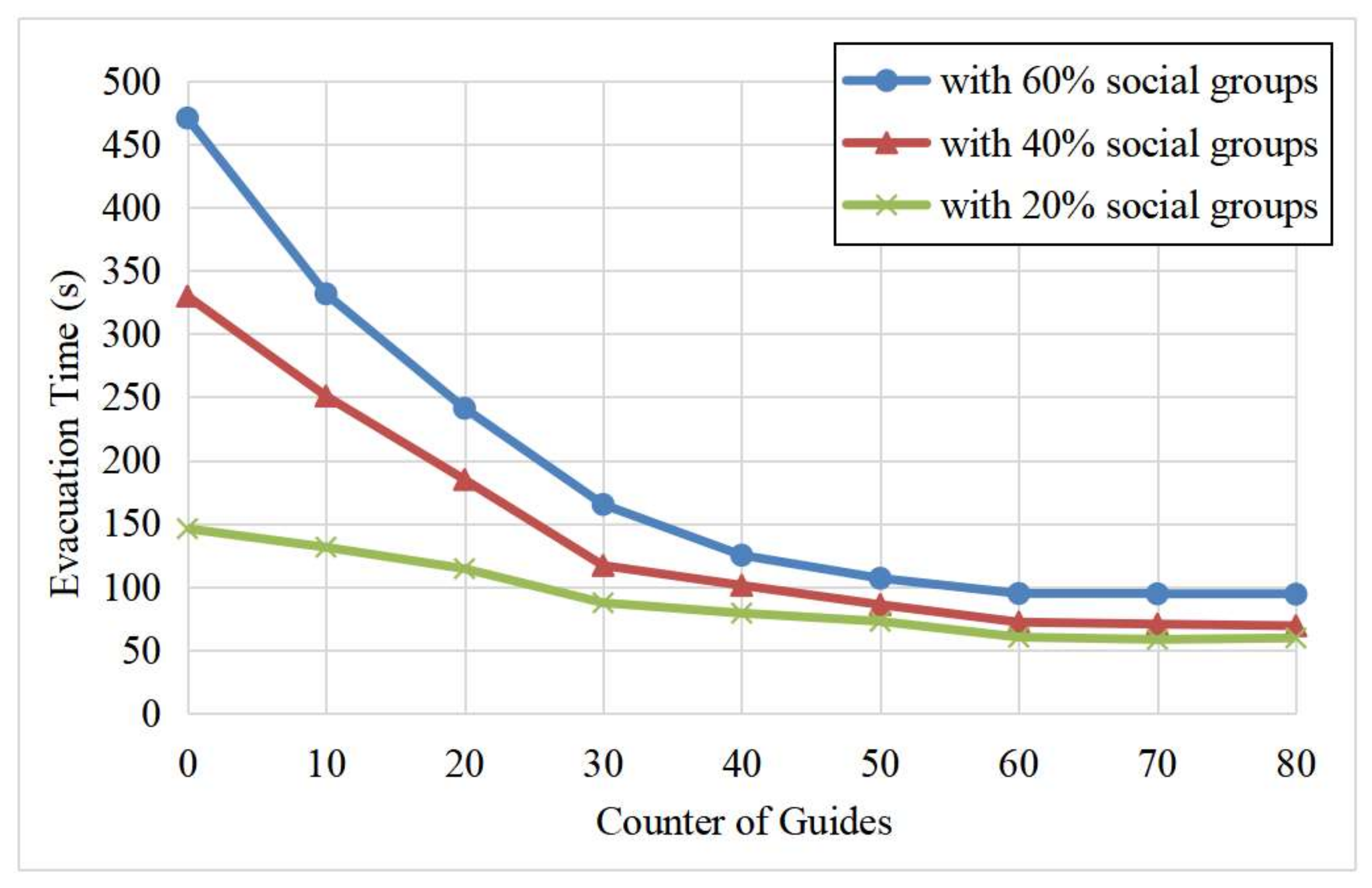
4.3. Effect of Guiding Behavior on Evacuation
4.4. Effect of Parameter Values on Evacuation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guo, R. Potential-based dynamic pedestrian flow assignment. Transp. Res. Part C Emerg. Technol. 2018, 91, 263–275. [Google Scholar] [CrossRef]
- Zheng, X.; Zhong, T.; Liu, M. Modeling crowd evacuation of a building based on seven methodological approaches. Build. Environ. 2009, 44, 437–445. [Google Scholar] [CrossRef]
- Wu, W.; Chen, M.; Li, J.; Liu, B.; Wang, X.; Zhen, X. Visual information based social force model for crowd evacuation. Tsinghua Sci. Technol. 2022, 27, 619–629. [Google Scholar] [CrossRef]
- Zhao, R.; Zhai, Y.; Qu, L.; Wang, R.; Huang, Y.; Dong, Q. A continuous floor field cellular automata model with interaction area for crowd evacuation. Phys. A Stat. Mech. Its Appl. 2021, 575, 126049. [Google Scholar] [CrossRef]
- Tak, S.; Kim, S.; Yeo, H. Agent-based pedestrian cell transmission model for evacuation. Transportmetrica A 2018, 14, 484–502. [Google Scholar] [CrossRef]
- Djehiche, B.; Tcheukam, A.; Tembine, H. A Mean-Field Game of Evacuation in Multi-Level Building. IEEE Trans. Automat. Contr. 2017, 62, 5154–5169. [Google Scholar] [CrossRef]
- Lu, P.; Yang, H.; Li, H. Swarm intelligence, social force and multi-agent modeling of heroic altruism behaviors under collective risks. Knowl. Based Syst. 2021, 214, 106725. [Google Scholar] [CrossRef]
- Guo, R.Y.; Huang, H.J.; Wong, S.C. Route choice in pedestrian evacuation under conditions of good and zero visibility: Experimental and simulation results. Transp. Res. Part B Meth. 2012, 46, 669–686. [Google Scholar] [CrossRef]
- Cao, S.; Song, W.; Lv, W. Modeling pedestrian evacuation with guiders based on a multi-grid model. Phys. Lett. A 2016, 380, 540–547. [Google Scholar] [CrossRef]
- Tanimoto, J.; Hagishima, A.; Tanaka, Y. Study of bottleneck effect at an emergency evacuation exit using cellular automata model, mean field approximation analysis, and game theory. Physica A 2010, 389, 5611–5618. [Google Scholar] [CrossRef]
- Li, Y.F.; Chen, J.M.; Jie, J. Analysis of Crowded Degree of Emergency Evacuation at ‘Bottleneck’ Position in Subway Station Based on Stairway Level of Service. Procedia Eng. 2011, 11, 242–251. [Google Scholar]
- Isobe, M.; Helbing, D.; Nagatani, T. Experiment, theory, and simulation of the evacuation of a room without visibility. Phys. Rev. E 2004, 69, 066132. [Google Scholar] [CrossRef] [PubMed]
- Manley, M. Airport Emergency Evacuation Planning: An Agent-Based Simulation Study of Dirty Bomb Scenarios. IEEE Trans. Syst. Man Cybern. B 2017, 46, 1390–1403. [Google Scholar] [CrossRef]
- Toyama, M.C.; Bazzan, A.L.C.; Silva, R.D. An agent-based simulation of pedestrian dynamics: From lane formation to auditorium evacuation. In Proceedings of the International Joint Conference on Autonomous Agents & Multiagent Systems, Hakodate, Japan, 9–12 May 2006; pp. 108–110. [Google Scholar]
- Konstantara, K.; Dourvas, N.I.; Georgoudas, I.G.; Sirakoulis, G.C. Parallel Implementation of a Cellular Automata-Based Model for Simulating Assisted Evacuation of Elderly People. In Proceedings of the 24th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP), Heraklion Crete, Greece, 17–19 February 2016; pp. 702–709. [Google Scholar]
- Mitsopoulou, M.; Dourvas, N.I.; Georgoudas, I.G.; Sirakoulis, G.C. Cellular Automata Model for Crowd Behavior Management in Airports. Int. Conf. Parallel Process. Appl. Math. (PPAM) 2019, 12044, 445–456. [Google Scholar]
- Hu, Y.H.; Bode, N.W.F. A systematic review and meta-analysis on the effect social groups have on the egress times of pedestrian crowds. Transportmetrica A 2022, in press. [Google Scholar] [CrossRef]
- Ma, Y.; Li, L.H.; Zhang, H. Experimental study on small group behavior and crowd dynamics in a tall office building evacuation. Physica A 2017, 473, 488–500. [Google Scholar] [CrossRef]
- Baddeley, M. Herding, Social influence and economic decision-making: Socio-psychological and neuroscientific analyses. Philos. Trans. R. Soc. B 2010, 365, 281–290. [Google Scholar] [CrossRef]
- Li, J.; Xue, B.; Wang, D.; Qian, X. Study on a new simulation model of evacuation behavior of heterogeneous social small group in public buildings. J. Appl. Sci. Eng. 2021, 24, 467–475. [Google Scholar]
- Xie, W.; Lee, E.W.M.; Li, T.; Shi, M.; Cao, R.; Zhang, Y. A study of group effects in pedestrian crowd evacuation: Experiments, modelling and simulation. Saf. Sci. 2020, 133, 105029. [Google Scholar] [CrossRef]
- Yang, L.Z.; Zhao, D.L.; Li, J.; Fang, T.Y. Simulation of the kin behaviour in building occupant evacuation based on cellular automaton. Build. Environ. 2005, 40, 411–415. [Google Scholar] [CrossRef]
- Almeida, R.; Girejko, E.; Machado, L. Evacuation by leader-follower model with bounded confidence and predictive mechanisms. Arch. Control Sci. 2021, 31, 629–644. [Google Scholar]
- Bao, D.; Ma, S.; Zhang, L.; Wei, H. Study on Evacuation of Multi-Exit Venues in Low Visibility Environment. Comput. Eng. Appl. 2020, 56, 274–278. [Google Scholar]
- Ren, H.; Yan, Y.; Gao, F. Variable guiding strategies in multi-exits evacuation: Pursuing balanced pedestrian densities. Appl. Math. Comput. 2021, 397, 125965. [Google Scholar] [CrossRef]
- Li, L.; Ma, Y.; Ding, N. Changes in social relation networks and leader-follower behavior in emergency evacuations. J. Tsinghua Univ. (Sci. Technol.) 2016, 56, 334–340. [Google Scholar]
- Lu, L.; Chan, C.Y.; Wang, J. A study of pedestrian group behaviors in crowd evacuation based on an extended floor field cellular automaton model. Transp. Res. Part C Emerg. Technol. 2017, 81, 317–329. [Google Scholar] [CrossRef]
- Haghani, M.; Sarvi, M.; Shahhoseini, Z. Dynamics of social groups’ decision-making in evacuations. Transp. Res. C Emerg. 2019, 104, 135–157. [Google Scholar] [CrossRef]
- Bode, N.W.; Hollet, S.; Mehner, W. Disentangling the impact of social groups on response times and movement dynamics in evacuations. PLoS ONE 2015, 10, e0121227. [Google Scholar] [CrossRef]
- Krüchten, C.V.; Schadschneider, A. Empirical study on social groups in pedestrian evacuation dynamics. Physica A 2017, 475, 129–141. [Google Scholar] [CrossRef]
- Vizzari, G.; Manenti, L.; Crociani, L. Adaptive Pedestrian Behaviour for the preservation of group cohesion. Complex Adapt. Syst. Model. 2013, 1, 7. [Google Scholar] [CrossRef]
- Ma, Y.; Lee, E.W.M.; Shi, M. Dual effects of guide-based guidance on pedestrian evacuation. Phys. Lett. A 2017, 381, 1837–1844. [Google Scholar] [CrossRef]
- Yang, X.; Yang, X.; Wang, Q.; Kang, Y.; Pan, F. Guide optimization in pedestrian emergency evacuation. Appl. Math. Comput. 2019, 365, 124711. [Google Scholar] [CrossRef]
- Wei, X.; Wang, J. A mesoscopic evacuation model based on multi-agent and entropy with leading behavior under fire conditions. Syst. Eng. Theory Pract. 2015, 35, 2473–2483. [Google Scholar]
- Rangel-Huerta, A.; Ballinas-Hernández, A.L.; Muñoz-Meléndez, A. An entropy model to measure heterogeneity of pedestrian crowds using self-propelled agents. Physica A 2017, 473, 213–224. [Google Scholar] [CrossRef]
- Zhao, Y.; Yuan, M.Q.; Su, G.F. Crowd macro state detection using entropy model. Physica A 2015, 431, 84–93. [Google Scholar] [CrossRef]
- Huang, L.; Chen, T.; Wang, Y. Congestion detection of pedestrians using the velocity entropy: A case study of Love Parade 2010 disaster. Physica A 2015, 440, 200–209. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, herds, and schools: A distributed behavioral model. Siggraph Comput. Graph. 1987, 21, 25–34. [Google Scholar] [CrossRef]
- Li, X.L.; Guo, F.; Kuang, H.; Geng, Z.F.; Fan, Y.H. An extended cost potential field cellular automaton model for pedestrian evacuation considering the restriction of visual field. Phys. A Stat. Mech. Appl. 2019, 515, 47–56. [Google Scholar] [CrossRef]
- Zou, B.; Lu, C.; Mao, S.; Li, Y. Effect of pedestrian judgement on evacuation efficiency considering hesitation. Phys. A Stat. Mech. Appl. 2020, 547, 122943. [Google Scholar] [CrossRef]
- Zhou, M.; Dong, H.R.; Wen, D.; Yao, X.M.; Sun, X.B. Modeling of Crowd Evacuation With Assailants via a Fuzzy Logic Approach. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2395–2407. [Google Scholar] [CrossRef]
- Tsurushima, A. Simulation Analysis of Tunnel Vision Effect in Crowd Evacuation. Artif. Intell. Soft Comput. 2021, 12854, 506–518. [Google Scholar]
- Harvey, J.; Merrick, K.; Abbass, H.A. Application of chaos measures to a simplified Boids flocking model. Swarm Intell. 2015, 9, 23–41. [Google Scholar] [CrossRef]
- Ashutosh, T.; Rao, S. Agent-based modelling of emergency evacuations considering human panic behavior. IEEE Trans. Comput. Soc. Syst. 2018, 5, 277–288. [Google Scholar]
- Zhang, X.; Yang, S.; Tang, Y.Y. A Thermodynamics-inspired Feature for Anomaly Detection on Crowd Motions in Surveillance Videos. Multimed. Tools Appl. 2016, 75, 8799–8826. [Google Scholar] [CrossRef]
- Zhang, D.; Zhu, H.; Du, L.; Hostikka, S. An optimization-based overtaking model for unidirectional pedestrian flow. Phys. Lett. A 2018, 382, 3172–3180. [Google Scholar] [CrossRef]
- Xu, H.; Guo, R. Simulation of bi-directional pedestrian flow by using a cell transmission model. Simul. Model. Pract. Theory 2018, 87, 1–14. [Google Scholar] [CrossRef]
- Luo, L.; Liu, X.; Fu, Z.; Ma, J.; Liu, F. Modeling following behavior and right-side-preference in multidirectional pedestrian flows by modified FFCA. Physica A 2020, 550, 124149. [Google Scholar] [CrossRef]
- Chen, X.; Wang, J. Entropy-based Crowd Evacuation Modeling with Seeking Behavior of Social Groups. IEEE Access 2020, 9, 4653–4664. [Google Scholar] [CrossRef]
- Helbing, D.; Farkas, I.; Vicsek, T. Simulating dynamical features of escape panic. Nature 2000, 407, 487–490. [Google Scholar]
- Tsiftsis, A.; Georgoudas, I.G.; Sirakoulis, G.C. Real Data Evaluation of a Crowd Supervising System for Stadium Evacuation and its Hardware Implementation. IEEE Syst. J. 2016, 10, 649–660. [Google Scholar] [CrossRef]
- Seyfried, A.; Steffen, B.; Klingsch, W.; Boltes, M. The fundamental diagram of pedestrian movement revisited. J. Stat. Mech. 2005, 10, P10002. [Google Scholar] [CrossRef]
- Poulos, A.; Tocornal, F.; de la LIera, J.C.; Mitrani-Reiser, J. Validation of an agent-based building evacuation model with a school drill. Transp. Res. Part C Emerg. Technol. 2018, 97, 82–95. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description | Default Value |
|---|---|---|
| S | sound propagation distance in evacuation scenario | 8 m |
| L | light propagation distance in evacuation scenario | 5 m |
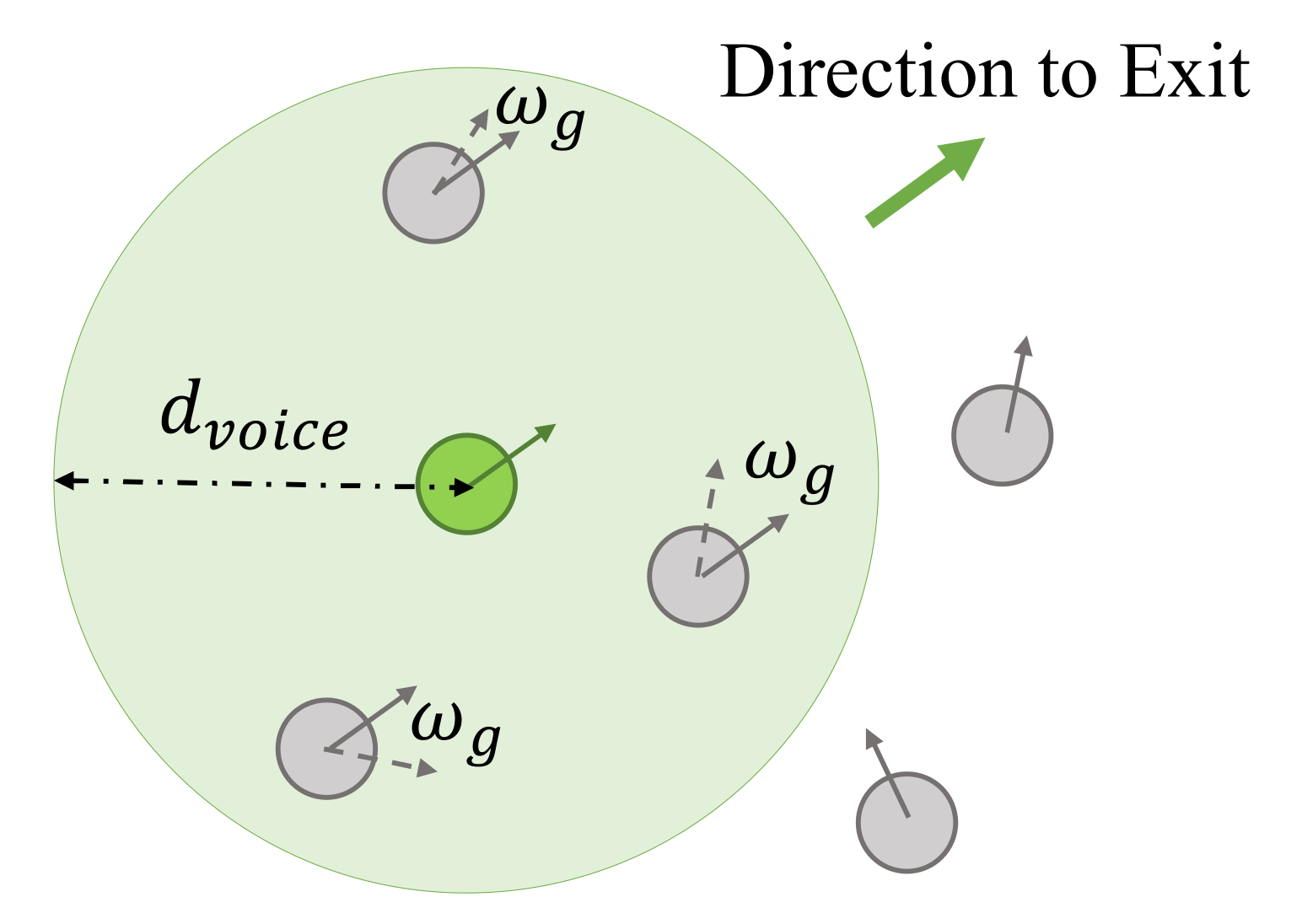
| the distance to determine whether seeking relatives | 2 m | |
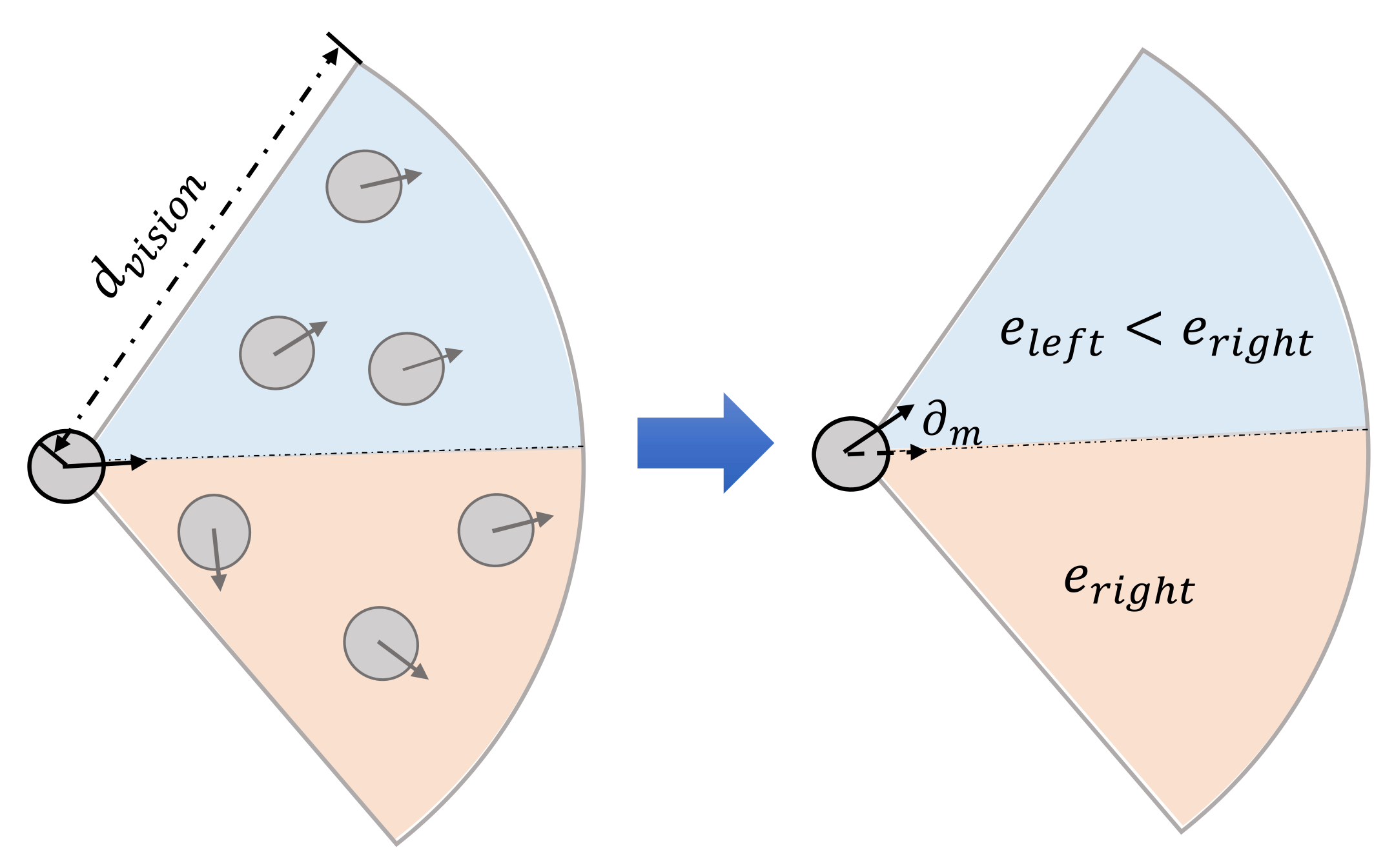
| the maximum angle of entropy modification | 10° | |
| the maximum angle of seeking relatives | 150° | |
| the maximum angle based on the escaping field | 90° | |
| the maximum deflection angle when being guided | 180° | |
| the maximum angle toward the nearby groups | 20° | |
| the maximal turning angle to avoid obstacles | 20° | |
| the maximal speed of evacuees | 2 m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Wang, J. An Entropy-Based Combined Behavior Model for Crowd Evacuation. Entropy 2022, 24, 1479. https://doi.org/10.3390/e24101479
Chen X, Wang J. An Entropy-Based Combined Behavior Model for Crowd Evacuation. Entropy. 2022; 24(10):1479. https://doi.org/10.3390/e24101479
Chicago/Turabian StyleChen, Xiaowei, and Jian Wang. 2022. "An Entropy-Based Combined Behavior Model for Crowd Evacuation" Entropy 24, no. 10: 1479. https://doi.org/10.3390/e24101479
APA StyleChen, X., & Wang, J. (2022). An Entropy-Based Combined Behavior Model for Crowd Evacuation. Entropy, 24(10), 1479. https://doi.org/10.3390/e24101479