
Application of Adaptive MOMEDA with Iterative Autocorrelation to Enhance Weak Features of Hoist Bearings


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Basic Theory of the Proposed Technique
2.1. MOMEDA
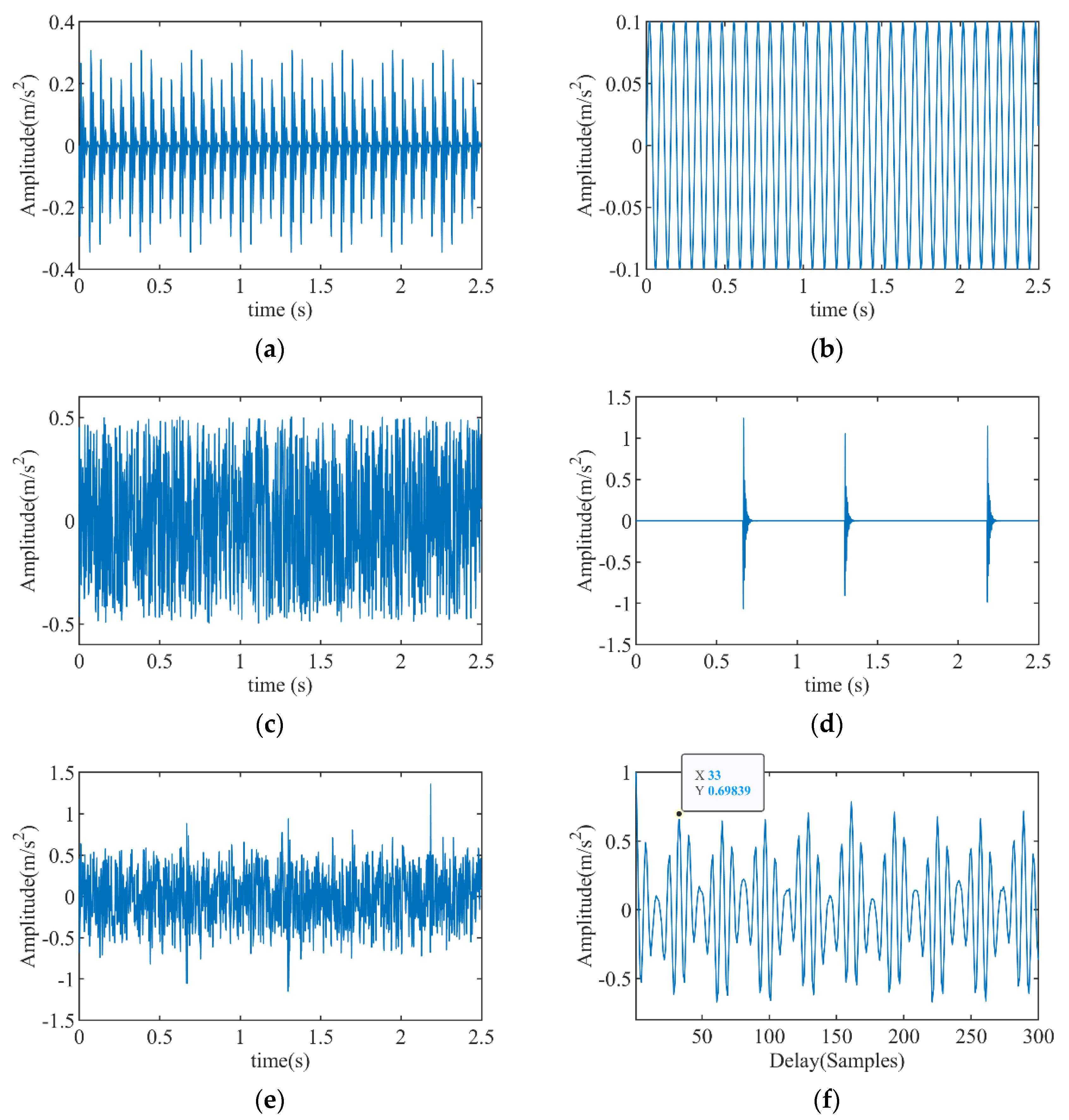
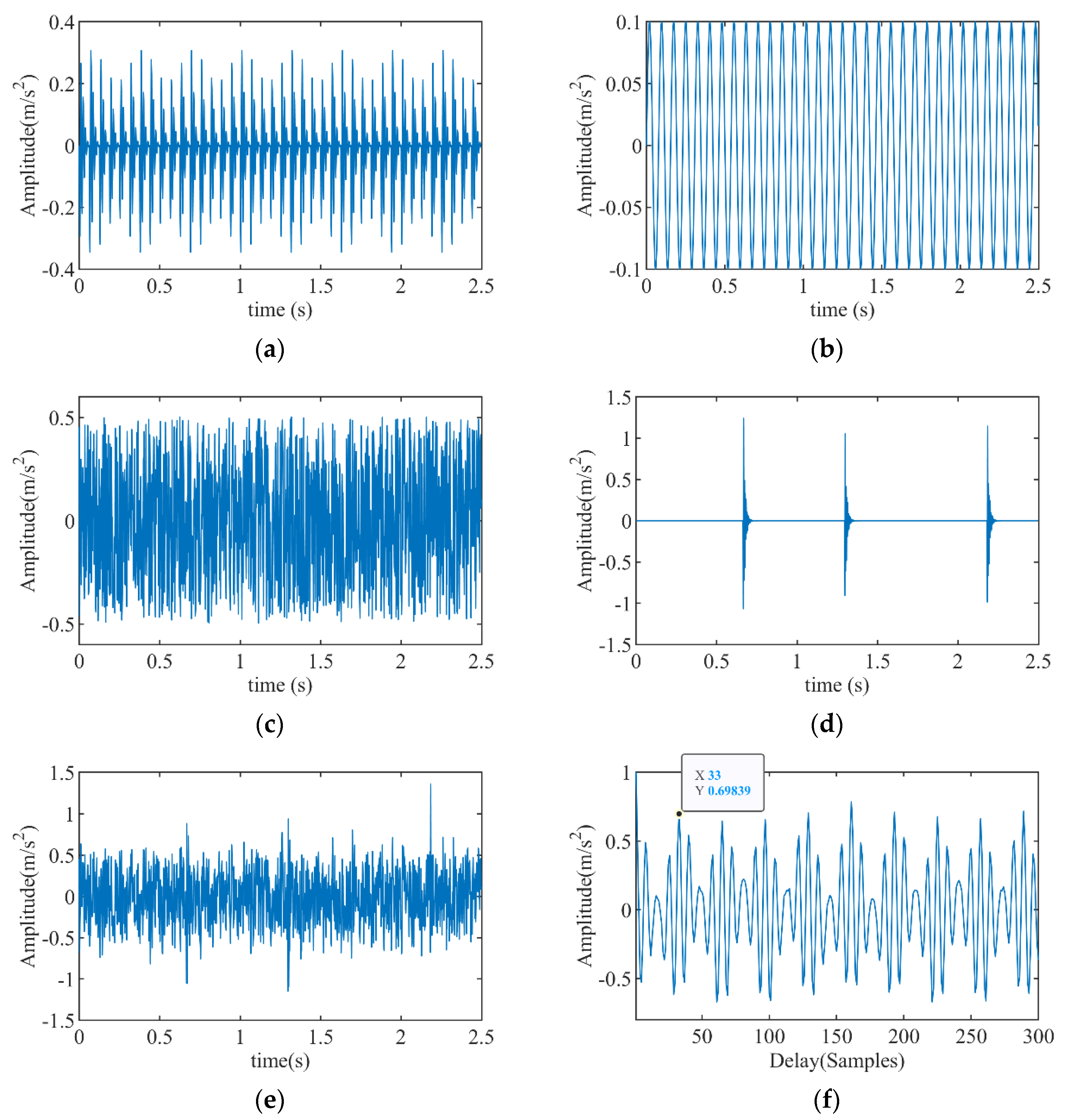
2.2. Iterative Autocorrelation
2.3. Construction of Autocorrelation Kurtosis Entropy Index
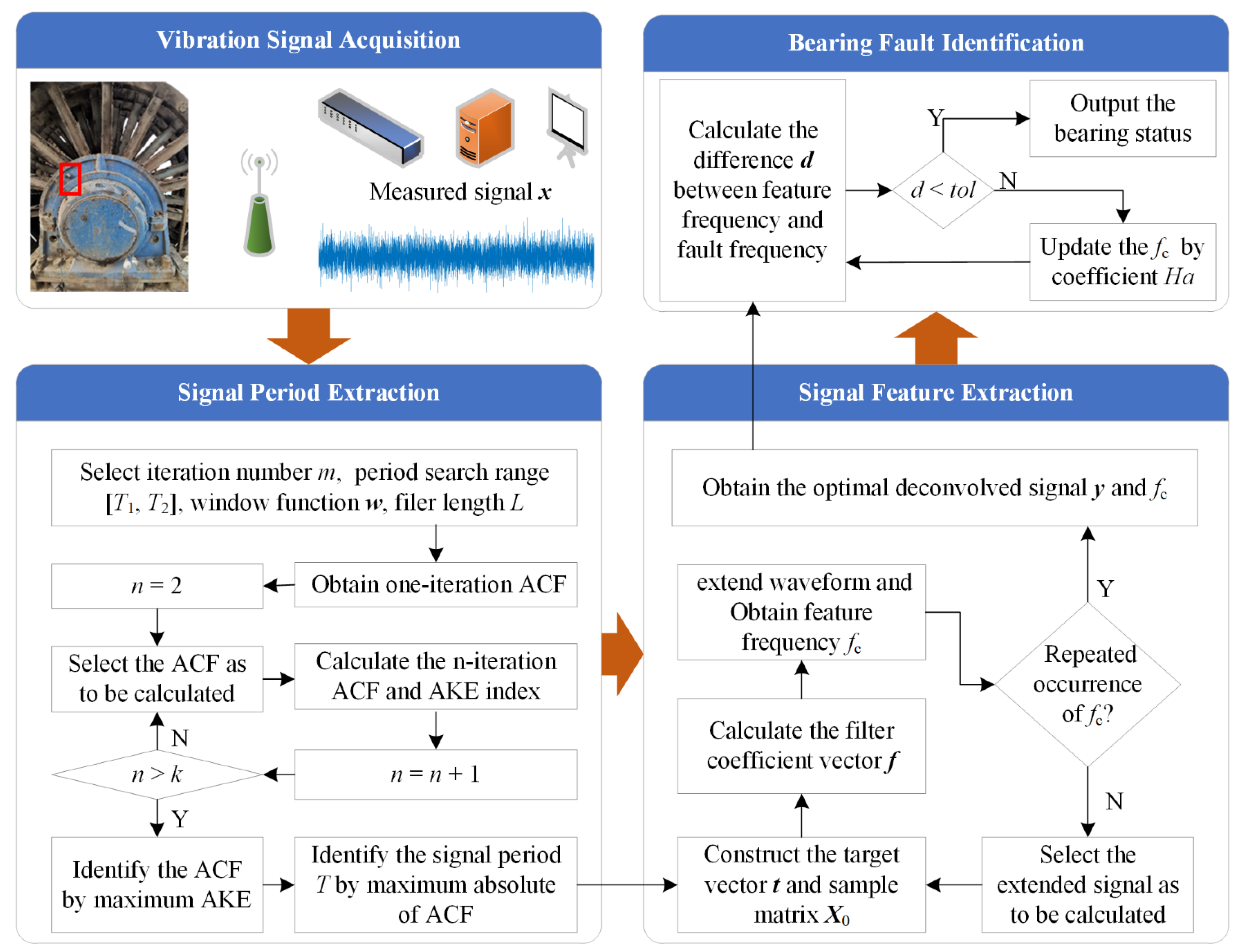
3. Algorithm Flow of Adaptive MOMEDA with IAC
| Algorithm 1 Signal Period Extraction. |
| Input: Measured signal x |
| Period search range [T1, T2] |
| Maximum number of iterations k |
| Threshold valued thre = 0 |
| Output: Signal period T |
| Initialize the input parameters; |
| for i = 1 to k |
| xxi = ACF(x) Compute the ACF of x, Equation (8) |
| indi = AKE(xxi(T1:T2)) Compute the AKE of ACF, Equation (12) |
| x = xxi |
| if i > 1 |
| if indi > thre |
| j = i Obtain the optimal number of iterations |
| thre = indi |
| end if |
| end if |
| end |
| [~, T] = max(xxj( T1:T2)) Identify the signal period T |
| Algorithm 2 Signal Feature Extraction. |
| Input: Measured signal x |
| Signal period T |
| Feature frequency set fn = [0] |
| Cycle judgment index m = 1 |
| Output: Feature frequency fc |
| Construct the target vector t through T; |
| While m ≠ 0 |
| y = MOMEDA(x) Equation (3)–(7) |
| s = extension(y) extend waveform [24] |
| Amp = FFT(s) Obtain the envelope spectrum |
| fc = max(Amp) Obtain the feature frequency fc |
| fd = fn − fc |
| m = min(abs(fd)) Feature frequency repetition recognition |
| fn = [fn fc] |
| x = s |
| end |
| Algorithm 3 Bearing fault identification. |
| Input: Feature frequency fc |
| Fault frequency set fd = [fi fo fb fr] |
| Frequency tolerance tol |
| Output: Bearing status d |
| for Ha = 1 to 5 |
| d = abs(fd − fc × Ha) |
| if min(d) < tol |
| break |
| end if |
| end |
4. Experimental and Comparative Analysis
4.1. Case 1: CWRU Data Analysis
4.1.1. Feature Extraction and Comparative Analysis of the Inner Ring Fault Signal
4.1.2. Feature Extraction of Other Bearing States
4.2. Case 2: Bearing Data Analysis of Self-Made Hoisting Testing Setup
4.3. Case 3: On-Site Hoisting Bearing State Detection
5. Conclusions
- (1)
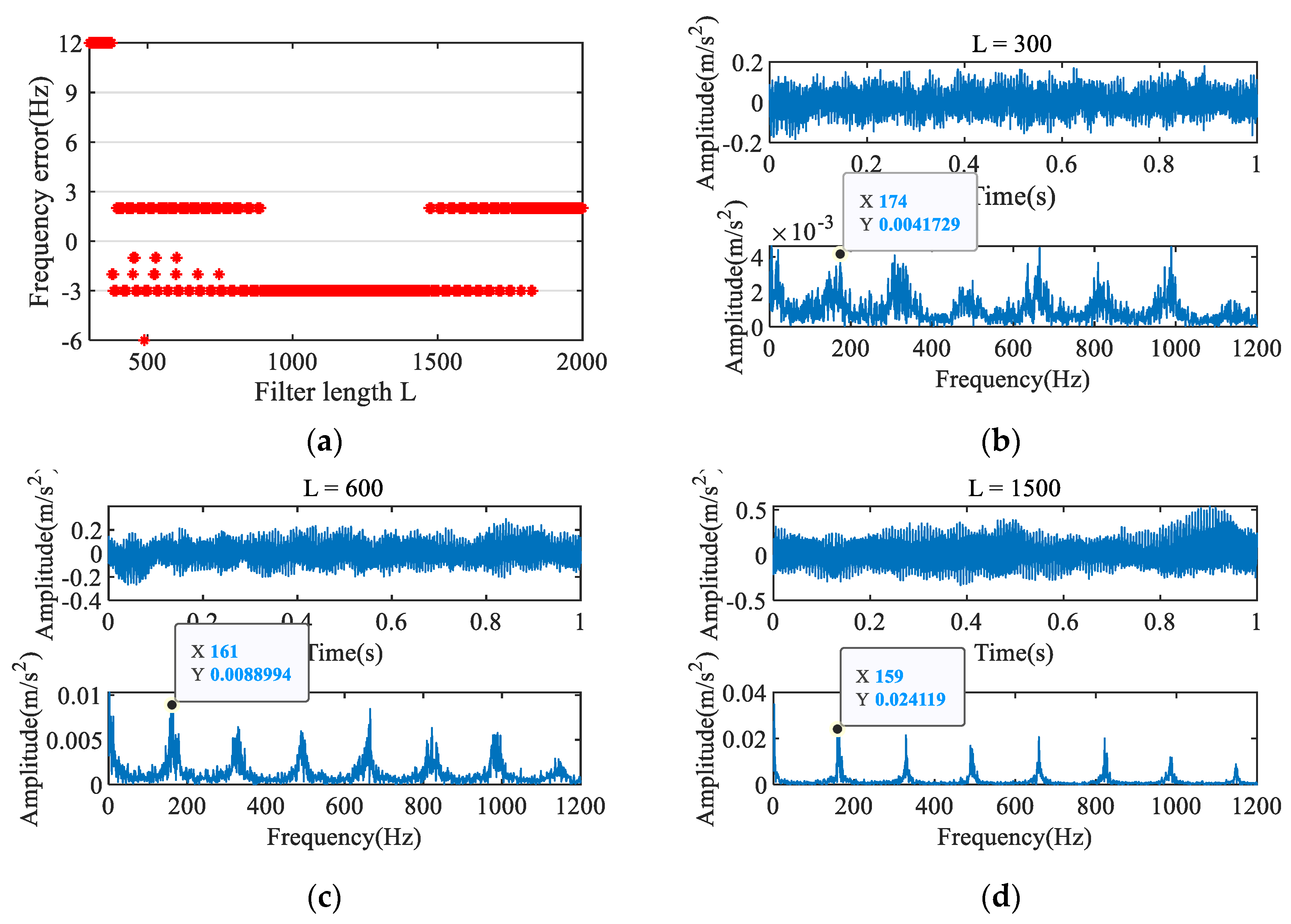
- The decomposition accuracy of MOMEDA is affected by the signal period and the filter length. The characteristic frequency is mainly affected by the period, and the wrong signal period can lead to the enhancement of false pulse components. However, even if the fault period is accurate, an inappropriate filter length may still cause the extraction of the wrong characteristic frequency.
- (2)
- The AKE index is introduced to IAC for the automatic identification of the signal period. The proposed method is robust to a complex noise background. The proposed iterative MOMEDA method can effectively eliminate the influence of filter length on the final effect.
- (3)
- The proposed method is verified by multiple sets of test data, and the results show that the proposed method can accurately identify faults and the normal state. Analysis using field data shows that the proposed method can effectively diagnose the working state of a hoisting bearing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gu, J.; Peng, Y.; Lu, H.; Cao, S.; Cao, B. Fault Diagnosis of Spindle Device in Hoist Using Variational Mode Decomposition and Statistical Features. Shock Vib. 2020, 2020, 1–14. [Google Scholar] [CrossRef]
- Liu, C.; Wang, F.; Su, W.; Xue, Z.; Li, H.; Han, Q. Condition monitoring and fault diagnosis methods for low-speed and heavy-load slewing bearings: A literature review. J. Vibroeng. 2017, 19, 3429–3444. [Google Scholar] [CrossRef]
- Jin, X.; Chen, Y.; Wang, L.; Han, H.; Chen, P. Failure prediction, monitoring and diagnosis methods for slewing bearings of large-scale wind turbine: A review. Measurement 2021, 172, 108855. [Google Scholar] [CrossRef]
- Ma, C.; Yao, J.; Xiao, X.; Zhang, X.; Jiang, Y. Fault diagnosis of head sheaves based on vibration measurement and data mining method. Adv. Mech. Eng. 2020, 12, 1–8. [Google Scholar] [CrossRef]
- Kou, Z.; Yang, F.; Wu, J.; Li, T. Application of ICEEMDAN Energy Entropy and AFSA-SVM for Fault Diagnosis of Hoist Sheave Bearing. Entropy 2020, 22, 1347. [Google Scholar] [CrossRef] [PubMed]
- Saufi, S.R.; Bin Ahmad, Z.A.; Leong, M.S.; Lim, M.H. Low-Speed Bearing Fault Diagnosis Based on ArSSAE Model Using Acoustic Emission and Vibration Signals. IEEE Access 2019, 7, 46885–46897. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, S.B.; Wang, B.N.; Habetler, T.G. Deep Learning Algorithms for Bearing Fault Diagnostics—A Review. In Proceedings of the 2019 IEEE 12th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (Sdemped), Toulouse, France, 27–30 August 2019; IEEE: New York, NY, USA, 2019; pp. 257–263. [Google Scholar]
- Barbosh, M.; Singh, P.; Sadhu, A. Empirical mode decomposition and its variants: A review with applications in structural health monitoring. Smart Mater. Struct. 2020, 29, 093001. [Google Scholar] [CrossRef]
- Wu, D.; Wang, J.; Wang, H.; Liu, H.; Lai, L.; He, T.; Xie, T. An Automatic Bearing Fault Diagnosis Method Based on Characteristics Frequency Ratio. Sensors 2020, 20, 1519. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Han, T.; Liu, Q.; Zhang, L.; Tan, A.C.C. Fault feature extraction of low speed roller bearing based on Teager energy operator and CEEMD. Measurement 2019, 138, 400–408. [Google Scholar] [CrossRef]
- Song, X.; Wang, H.; Chen, P. Weighted kurtosis-based VMD and improved frequency-weighted energy operator low-speed bearing-fault diagnosis. Meas. Sci. Technol. 2020, 32, 035016. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, L.; Carrasco, J. Vibration analysis for large-scale wind turbine blade bearing fault detection with an empirical wavelet thresholding method. Renew. Energy 2020, 146, 99–110. [Google Scholar] [CrossRef]
- Yang, J.; Huang, D.; Zhou, D.; Liu, H. Optimal IMF selection and unknown fault feature extraction for rolling bearings with different defect modes. Measurement 2020, 157, 107660. [Google Scholar] [CrossRef]
- Yang, F.; Kou, Z.; Wu, J.; Li, T. Application of Mutual Information-Sample Entropy Based MED-ICEEMDAN De-Noising Scheme for Weak Fault Diagnosis of Hoist Bearing. Entropy 2018, 20, 667. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McDonald, G.L.; Zhao, Q. Multipoint Optimal Minimum Entropy Deconvolution and Convolution Fix: Application to vibration fault detection. Mech. Syst. Signal Process. 2017, 82, 461–477. [Google Scholar] [CrossRef]
- Yang, J.; Li, X.; Wu, L. Research on Fault Feature Extraction Method Based on FDM-RobustICA and MOMEDA. Math. Probl. Eng. 2020, 2020, 6753949. [Google Scholar] [CrossRef]
- Li, T.; Kou, Z.; Wu, J.; Yahya, W.; Villecco, F.; Guo, L. Multipoint Optimal Minimum Entropy Deconvolution Adjusted for Automatic Fault Diagnosis of Hoist Bearing. Shock Vib. 2021, 2021, 1–15. [Google Scholar]
- Wang, Z.; Du, W.; Wang, J.; Zhou, J.; Han, X.; Zhang, Z.; Huang, L. Research and application of improved adaptive MOMEDA fault diagnosis method. Measurement 2019, 140, 63–75. [Google Scholar] [CrossRef]
- Zhou, C.; Ma, J.; Wu, J.; Feng, Z. A Parameter Adaptive MOMEDA Method Based on Grasshopper Optimization Algorithm to Extract Fault Features. Math. Probl. Eng. 2019, 2019, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Li, H.; Ou, J.; Hu, R.; Hu, S.; Liu, A. Identification of planetary gearbox weak compound fault based on parallel dual-parameter optimized resonance sparse decomposition and improved MOMEDA. Measurement 2020, 165, 108079. [Google Scholar] [CrossRef]
- Miao, Y.H.; Zhao, M.; Lin, J.; Lei, Y.G. Application of an improved maximum correlated kurtosis deconvolution method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2017, 92, 173–195. [Google Scholar] [CrossRef]
- Chen, B.; Zhang, W.; Song, D.; Cheng, Y. Blind deconvolution assisted with periodicity detection techniques and its application to bearing fault feature enhancement. Measurement 2020, 159, 107804. [Google Scholar] [CrossRef]
- Zhao, M.; Jia, X. A novel strategy for signal denoising using reweighted SVD and its applications to weak fault feature enhancement of rotating machinery. Mech. Syst. Signal Process. 2017, 94, 129–147. [Google Scholar] [CrossRef]
- Cheng, Y.; Chen, B.; Zhang, W. Adaptive Multipoint Optimal Minimum Entropy Deconvolution Adjusted and Application to Fault Diagnosis of Rolling Element Bearings. IEEE Sens. J. 2019, 19, 12153–12164. [Google Scholar] [CrossRef]
- Zhang, Y.; Liang, M.; Li, C.; Hou, S.M. Joint Kurtosis-Based Adaptive Bandstop Filtering and Iterative Autocorrelation Approach to Bearing Fault Detection. J. Vib. Acoust. Trans. ASME 2013, 135, 051026. [Google Scholar] [CrossRef]
- Pang, B.; Tang, G.; Tian, T. Rolling Bearing Fault Diagnosis Based on SVDP-Based Kurtogram and Iterative Autocorrelation of Teager Energy Operator. IEEE Access 2019, 7, 77222–77237. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, G.; Liu, C. Research on bearing fault diagnosis based on spectrum characteristics under strong noise interference. Measurement 2021, 169, 108509. [Google Scholar] [CrossRef]
- Li, Z.; Ma, J.; Wang, X.; Li, X. An Optimal Parameter Selection Method for MOMEDA Based on EHNR and Its Spectral Entropy. Sensors 2021, 21, 533. [Google Scholar] [CrossRef]
- Rostaghi, M.; Azami, H. Dispersion Entropy: A Measure for Time-Series Analysis. IEEE Signal Process. Lett. 2016, 23, 610–614. [Google Scholar] [CrossRef]
- Sandoval, D.; Leturiondo, U.; Vidal, Y.; Pozo, F. Entropy Indicators: An Approach for Low-Speed Bearing Diagnosis. Sensors 2021, 21, 849. [Google Scholar] [CrossRef]
- Sandoval, D.; Leturiondo, U.; Pozo, F.; Vidal, Y. Low-Speed Bearing Fault Diagnosis Based on Permutation and Spectral Entropy Measures. Appl. Sci. 2020, 10, 4666. [Google Scholar] [CrossRef]
- Loparo, K. Bearings Vibration Data Set, Case Western Reserve University. 2003. Available online: http://csegroups.case.edu/bearingdatacenter/pages/download-data-file (accessed on 9 December 2020).







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, T.; Kou, Z.; Wu, J.; Yang, F. Application of Adaptive MOMEDA with Iterative Autocorrelation to Enhance Weak Features of Hoist Bearings. Entropy 2021, 23, 789. https://doi.org/10.3390/e23070789
Li T, Kou Z, Wu J, Yang F. Application of Adaptive MOMEDA with Iterative Autocorrelation to Enhance Weak Features of Hoist Bearings. Entropy. 2021; 23(7):789. https://doi.org/10.3390/e23070789
Chicago/Turabian StyleLi, Tengyu, Ziming Kou, Juan Wu, and Fen Yang. 2021. "Application of Adaptive MOMEDA with Iterative Autocorrelation to Enhance Weak Features of Hoist Bearings" Entropy 23, no. 7: 789. https://doi.org/10.3390/e23070789
APA StyleLi, T., Kou, Z., Wu, J., & Yang, F. (2021). Application of Adaptive MOMEDA with Iterative Autocorrelation to Enhance Weak Features of Hoist Bearings. Entropy, 23(7), 789. https://doi.org/10.3390/e23070789