On the Capacity Regions of Degraded Relay Broadcast Channels with and without Feedback



{kind=link}
{kind=link}
Abstract
1. Introduction
- Various definitions of degraded RBCs: Due to the five channel parameters , there could be multiple definitions of degraded RBCs, which poses difficulties finding a unified single-letter capacity region for all types of degraded RBCs. For example, in [16], Behboodi and Piantanida defined RBC as degraded/semi-degraded if it satisfied one of the following conditions.
- -
- Condition 1: and .
- -
- Condition 2: and .
In [16], the RBC satisfying Condition 1 was called degraded RBC and the RBC satisfying Condition 2 semi-degraded degraded RBC. In Condition 1, the relay’s observed signal is “stronger” than both receivers’. In Condition 2, the relay’s observed signal is “stronger” than one receiver’s, but “weaker” than the other receiver’s. Apart from these conditions, one can also define new types of degraded RBCs by changing the location of in the Markov chains or assuming that the relay’s observed signal is “weaker” than both receivers’, e.g., satisfying:- -
- Condition 3: .
Notice that for the discrete memoryless (DM) degraded RBCs satisfying the three conditions above, only the capacity region of RBC satisfying Condition 2 is already known, while for the Gaussian case, only the capacity region of RBC satisfying Condition 1 is already known [14]. - Achievability proof: To establish the capacity regions of different types of degraded RBCs, an ideal solution is to find a general inner bound and outer bound that match for all types of degraded RBCs. Since the capacity results for the degraded broadcast channel (BC) and degraded relay channel are already known, one may come up with a mixed scheme by combining the optimal schemes used in these channels. Unfortunately, this mixed scheme turns out to be not always optimal [13,14]. An alternative way is to exploit the degradation structure and carefully the design coding scheme for each specific type, such as the work done in [14,16]. Note that this is not an easy work, either. For example, the capacity region of the degraded RBC that satisfies the aforementioned Condition 1 is still unknown, except for the Gaussian case.
- Converse proof: The cut-set bound is strictly suboptimal, since it is not even tight for the degraded BCs. An outer bound for the degraded BCs satisfying the aforementioned Condition 1 or Condition 2 was established in [16]. It is not known whether this outer bound is optimal, as this outer bound does not match with the proposed inner bound in the given rate expressions. Moreover, the outer bound could be invalid for other types of degraded RBCs. Thus, it would be necessary to build outer bounds for different types of degrade RBCs and prove their tightness.
- For DM-physically degraded RBCs (PDRBCs) satisfying Condition 1, a new outer bound is established, which has the same rate expression as an existing inner bound, with only a slight difference on the input distributions; for Gaussian PDRBCs satisfying Condition 2, the capacity region is established based on entropy power inequality (EPI) [22] and an appropriate relay strategy; for PDRBCs satisfying Condition 3, the capacity regions are established both for the DM and Gaussian cases.
- We propose a new coding scheme for general RBC with relay feedback where the relay node can send the feedback signal to the transmitter. The new scheme is based on a hybrid relay strategy and a layered Marton’s coding. It is shown that our scheme can strictly enlarge Behboodi and Piantanida’s rate region, which is tight for the second type of DM-PDRBC. Moreover, we show that capacity regions of the second and third types of PDRBCs are exactly the same as that without feedback, which means that feedback cannot enlarge capacity regions for these types of RBCs.
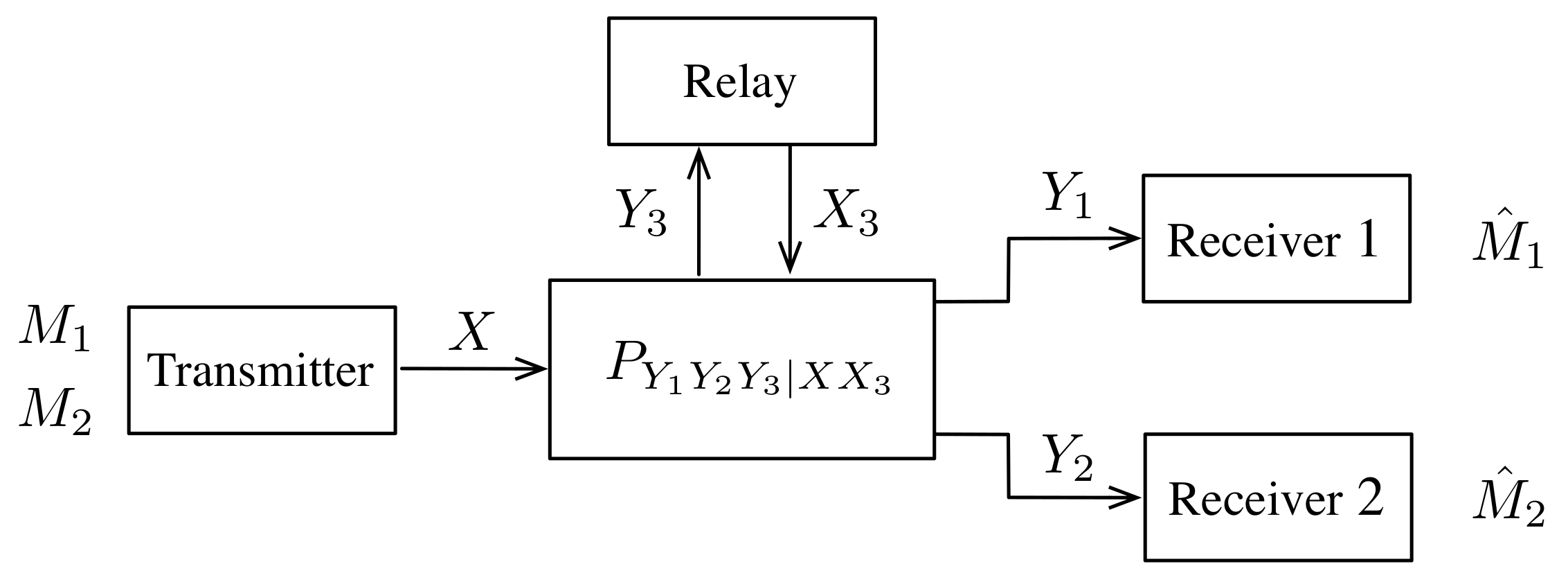
2. System Model
2.1. RBC without Feedback
- two message sets and ,
- a source encoder that maps messages to the channel input , for each time ,
- a relay encoder that maps to a sequence , where , for time ,
- two decoders that estimate and based on and , respectively, where , for .
2.2. RBC with Feedback
- two message sets and ,
- a source encoder that maps messages to the channel input , for each time ,
- a relay encoder that maps to a sequence , for ,
- two decoders that estimate and based on and , respectively.
3. Definitions of Various PDRBCs
- Type-I PDRBC if and form Markov chains.
- Type-II PDRBC if and form Markov chains.
- Type-III PDRBC if forms a Markov chain.
- Type-I stochastically degraded RBC if there exist random variables such that and and and form Markov chains.
- Type-II stochastically degraded RBC if there exist random variables such that and and and form Markov chains.
- Type-III stochastically degraded RBC if there exist random variables such that and and forms a Markov chain.
Gaussian PDRBCs
- Type-I Gaussian PDRBC: The channel outputs are equivalent to:where and are independent. Note that in this case, and form Markov chains, and the noise variances satisfy:
- Type-II Gaussian PDRBC: The channel outputs are equivalent to:where and are independent. Note that in this case, and form Markov chains, and the noise variances satisfy:
- Type-III Gaussian PDRBC: The channel outputs are equivalent to:where and are independent. Note that in this case, forms a Markov chain, and the noise variances satisfy:
4. Capacity Results for PDRBC without Feedback
4.1. Discrete Memoryless PDRBC
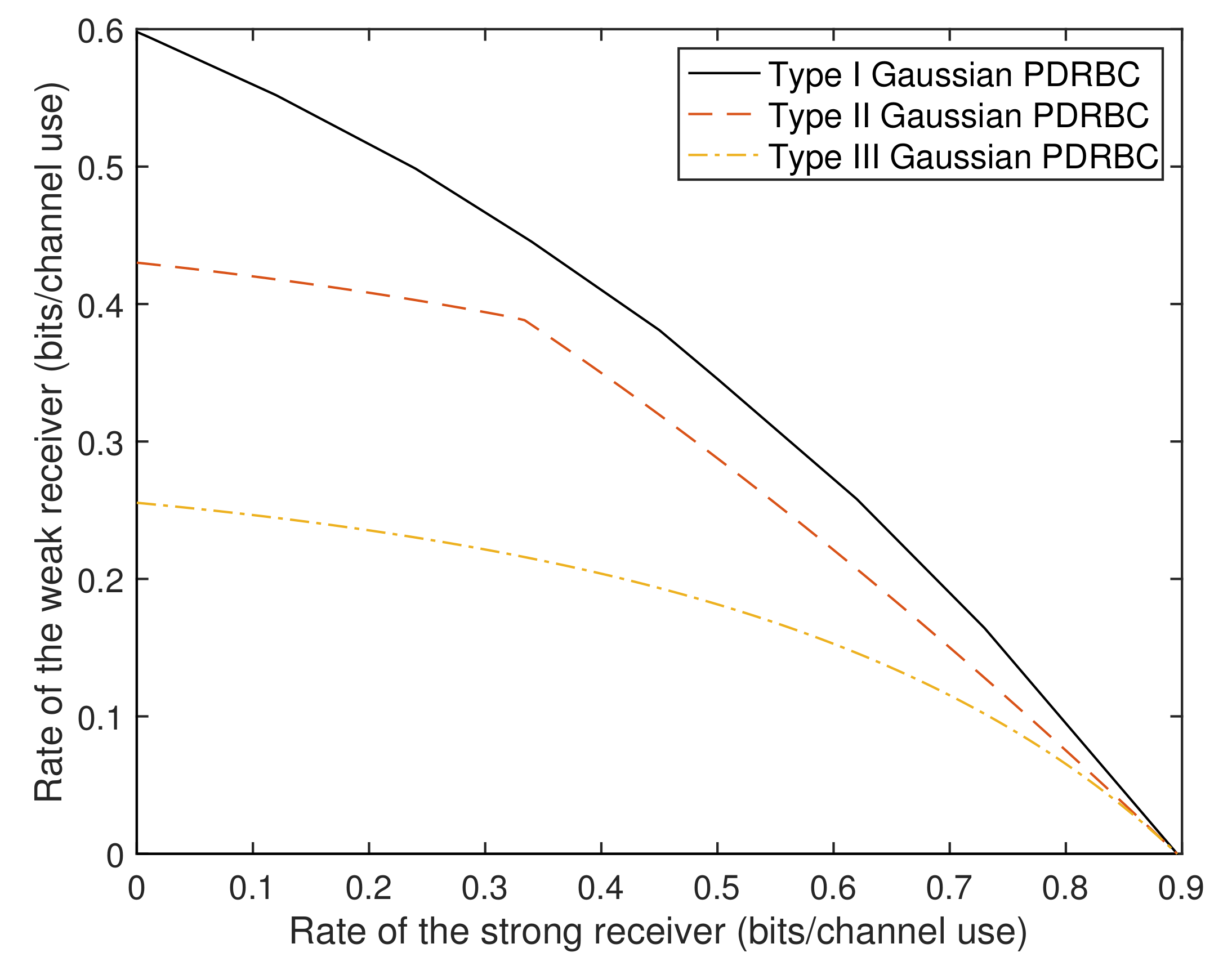
4.2. Gaussian PDRBC
5. Results on RBC with Feedback
6. Coding Schemes for RBC with Feedback
6.1. Codebook
6.2. Transmitter’s Encoding
6.3. Relay’s Encoding
6.4. Decoding
7. Outer Bounds for PDRBC with Feedback
7.1. Outer Bound for Type-I PDRBC with Feedback
7.2. Outer Bound for Type-II PDRBC with Feedback
7.3. Outer Bound for Type-III PDRBC with Feedback
8. Proof of Theorem 2
8.1. Capacity Region on Type-II Gaussian PDRBC
- (1)
- Proof of the achievability:Let:where are independent of each other and , , , and , with , and . With the choice above, we obtain:where , and .
- (2)
- Proof of the converse:Consider:since:there must exist a such that:Similarly, since:there must exist an such that:Thus,Next, consider:Thus,Now, consider:since:Thus,which implies:This completes the proof of the converse.
8.2. Capacity Region on Type-III Gaussian PDRBC
- (1)
- Proof of the achievability:The achievability follows by the traditional superposition coding and by shutting down the relay, i.e., set:where and are independent of each other. With this choice, it is easy to obtain the rate region in (8).
- (2)
- Proof of the converseConsider:Since:there must exist an such that:Thus:Next, consider:Using the conditional EPI, we obtain:Combining (34) and (35), we have:which implies:and hence:This completes the proof of the converse.
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Van Der Meulen, E.C. Three-terminal communication channels. Adv. Appl. Probab. 1971, 3, 120–154. [Google Scholar] [CrossRef]
- Cover, T.; Gamal, A.E. Capacity theorems for the relay channel. IEEE Trans. Inf. Theory 1979, 25, 572–584. [Google Scholar] [CrossRef]
- Liang, Y.; Veeravalli, V.V. Cooperative relay broadcast channels. IEEE Trans. Inf. Theory 2007, 53, 900–928. [Google Scholar] [CrossRef]
- Liang, Y.; Kramer, G. Rate regions for relay broadcast channels. IEEE Trans. Inf. Theory 2007, 53, 3517–3535. [Google Scholar] [CrossRef]
- Steinberg, Y. Instances of the relay-broadcast channel and cooperation strategies. In Proceedings of the 2015 IEEE International Symposium on Information Theory (ISIT), Hong Kong, China, 14–19 June 2015; pp. 2653–2657. [Google Scholar]
- Padidar, P.; Ho, P.H.; Ho, J. End-to-end distortion analysis of multicasting over orthogonal receive component decode-forward cooperative broadcast channels. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar]
- Dikstein, L.; Permuter, H.H.; Steinberg, Y. On state-dependent degraded broadcast channels with cooperation. IEEE Trans. Inf. Theory 2016, 62, 2308–2323. [Google Scholar] [CrossRef]
- Dai, B.; Yu, L.; Ma, Z. Compress-and-forward strategy for the relay broadcast channel with confidential messages. In Proceedings of the 2016 IEEE International Conference on Communications Workshops (ICC), Kuala Lumpur, Malaysia, 23–27 May 2016; pp. 254–259. [Google Scholar]
- Khosravi-Farsani, R.; Akhbari, B.; Mirmohseni, M.; Aref, M.R. Cooperative relay-broadcast channels with causal channel state information. In Proceedings of the 2009 IEEE International Symposium on Information Theory, Seoul, Korea, 28 June–3 July 2009; pp. 1174–1178. [Google Scholar]
- Zaidi, A.; Vandendorpe, L. Rate regions for the partially-cooperative relay broadcast channel with non-causal side information. In Proceedings of the 2007 IEEE International Symposium on Information Theory, Nice, France, 24–29 June 2007; pp. 1246–1250. [Google Scholar]
- Wu, Y. Achievable rate regions for cooperative relay broadcast channels with rate-limited feedback. In Proceedings of the 2016 IEEE international symposium on information theory (ISIT), Barcelona, Spain, 10–15 July 2016; pp. 1660–1664. [Google Scholar]
- Dabora, R.; Servetto, S.D. Broadcast channels with cooperating decoders. IEEE Trans. Inf. Theory 2006, 52, 5438–5454. [Google Scholar] [CrossRef]
- Kramer, G.; Gastpar, M.; Gupta, P. Cooperative strategies and capacity theorems for relay networks. IEEE Trans. Inf. Theory 2005, 51, 3037–3063. [Google Scholar] [CrossRef]
- Bhaskaran, S.R. Gaussian degraded relay broadcast channel. IEEE Trans. Inf. Theory 2008, 54, 3699–3709. [Google Scholar] [CrossRef]
- Khosravi-Farsani, R.; Akhbari, B.; Aref, M.R. The capacity region of a class of Relay-Broadcast Channels and relay channels with three parallel unmatched subchannels. In Proceedings of the 2010 International Symposium On Information Theory & Its Applications, Taichung, Taiwan, 17–20 October 2010; pp. 818–823. [Google Scholar]
- Behboodi, A.; Piantanida, P. Cooperative strategies for simultaneous and broadcast relay channels. IEEE Trans. Inf. Theory 2012, 59, 1417–1443. [Google Scholar] [CrossRef]
- Chen, L. On rate region bounds of broadcast relay channels. In Proceedings of the 2010 44th Annual Conference on Information Sciences and Systems (CISS), Princeton, NJ, USA, 17–19 March 2010; pp. 1–6. [Google Scholar]
- Wan, H.; Chen, W.; Wang, X. Joint source and relay design for MIMO relaying broadcast channels. IEEE Commun. Lett. 2013, 17, 345–348. [Google Scholar] [CrossRef]
- Salehkalaibar, S.; Ghabeli, L.; Aref, M. An achievable rate region for a class of Broadcast-Relay Networks. In Proceedings of the 2010 IEEE Information Theory Workshop on Information Theory (ITW 2010, Cairo), Cairo, Egypt, 6–8 January 2010; pp. 1–5. [Google Scholar]
- Hakim, H.; Boujemaa, H.; Ajib, W. Single relay selection schemes for broadcast networks. IEEE Trans. Wirel. Commun. 2013, 12, 2646–2657. [Google Scholar] [CrossRef]
- He, C.; Yang, S.; Piantanida, P. An achievable rate region of broadcast relay channel with state feedback. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 4193–4198. [Google Scholar]
- El Gamal, A.; Kim, Y.H. Network Information Theory; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]


© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, B.; Wang, K.; Ma, Y.; Wu, Y. On the Capacity Regions of Degraded Relay Broadcast Channels with and without Feedback. Entropy 2020, 22, 784. https://doi.org/10.3390/e22070784
Hu B, Wang K, Ma Y, Wu Y. On the Capacity Regions of Degraded Relay Broadcast Channels with and without Feedback. Entropy. 2020; 22(7):784. https://doi.org/10.3390/e22070784
Chicago/Turabian StyleHu, Bingbing, Ke Wang, Yingying Ma, and Youlong Wu. 2020. "On the Capacity Regions of Degraded Relay Broadcast Channels with and without Feedback" Entropy 22, no. 7: 784. https://doi.org/10.3390/e22070784
APA StyleHu, B., Wang, K., Ma, Y., & Wu, Y. (2020). On the Capacity Regions of Degraded Relay Broadcast Channels with and without Feedback. Entropy, 22(7), 784. https://doi.org/10.3390/e22070784